Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНФРАЗВУКОВЫХ КОЛЕБАНИЙ СРЕДЫ
Вид РИД
Изобретение
Изобретение относится к измерительной технике, в частности к области измерения инфразвуковых колебаний газообразной или жидкой среды.
Известно устройство для измерения инфразвуковых колебаний среды, содержащее корпус и чувствительный элемент, связанный с окружающей средой и средой внутри корпуса [1].
Наиболее близким техническим решением к предлагаемому (прототипом) является устройство для измерения инфразвуковых колебаний среды, содержащее корпус, чувствительный элемент, связанный с окружающей средой и средой внутри корпуса, и последовательно соединенные датчик перемещения чувствительного элемента, полосовой усилитель и демодулятор, подключенный к аналоговому выходу устройства, а также генератор, подключенный к датчику перемещения чувствительного элемента и демодулятору [2]. Недостатком прототипа является то, что устройство не обеспечивает требуемой точности измерений из-за недостаточного динамического диапазона и отсутствия калибровки, в том числе при использовании акустических фильтров.
Техническим результатом, обеспечиваемым заявляемым изобретением, является повышение точности измерения.
Технический результат достигается тем, что устройство для измерения инфразвуковых колебаний среды, содержащее акустический фильтр в виде N секций (N≥1), связанный с корпусом, чувствительный элемент, связанный с окружающей средой и средой внутри корпуса, последовательно соединенные чувствительный элемент, датчик перемещения чувствительного элемента, полосовой усилитель и демодулятор, подключенный к аналоговому выходу устройства, а также генератор, подключенный к датчику перемещения чувствительного элемента и демодулятору, дополнительно содержит последовательно соединенные аналого-цифровой преобразователь, микропроцессор с цифровым портом, цифроаналоговый преобразователь, первый ключ, сумматор, первый усилитель и первый преобразователь электрического сигнала в механические колебания, связанный с чувствительным элементом, фильтр, подключенный входом к демодулятору и выходом - ко второму входу сумматора, а для каждой из N секций - последовательно соединенные (N+1) ключ, (N+1) усилитель и (N+1) преобразователь электрического сигнала в механические колебания, установленный на входе в N секцию, причем вход аналого-цифрового преобразователя подключен к демодулятору, входы ключей подключены к цифроаналоговому преобразователю, а управляющими входами ключи подключены к микропроцессору.
Технический результат достигается также тем, что преобразователь электрического сигнала в механические колебания выполнен в виде электродинамического преобразователя электрического сигнала в механические колебания мембраны, чувствительный элемент выполнен в виде подвижной мембраны, являющейся одним из электродов емкостного датчика или связанной с первым электродом емкостного датчика, причем второй неподвижный электрод емкостного датчика связан с корпусом.
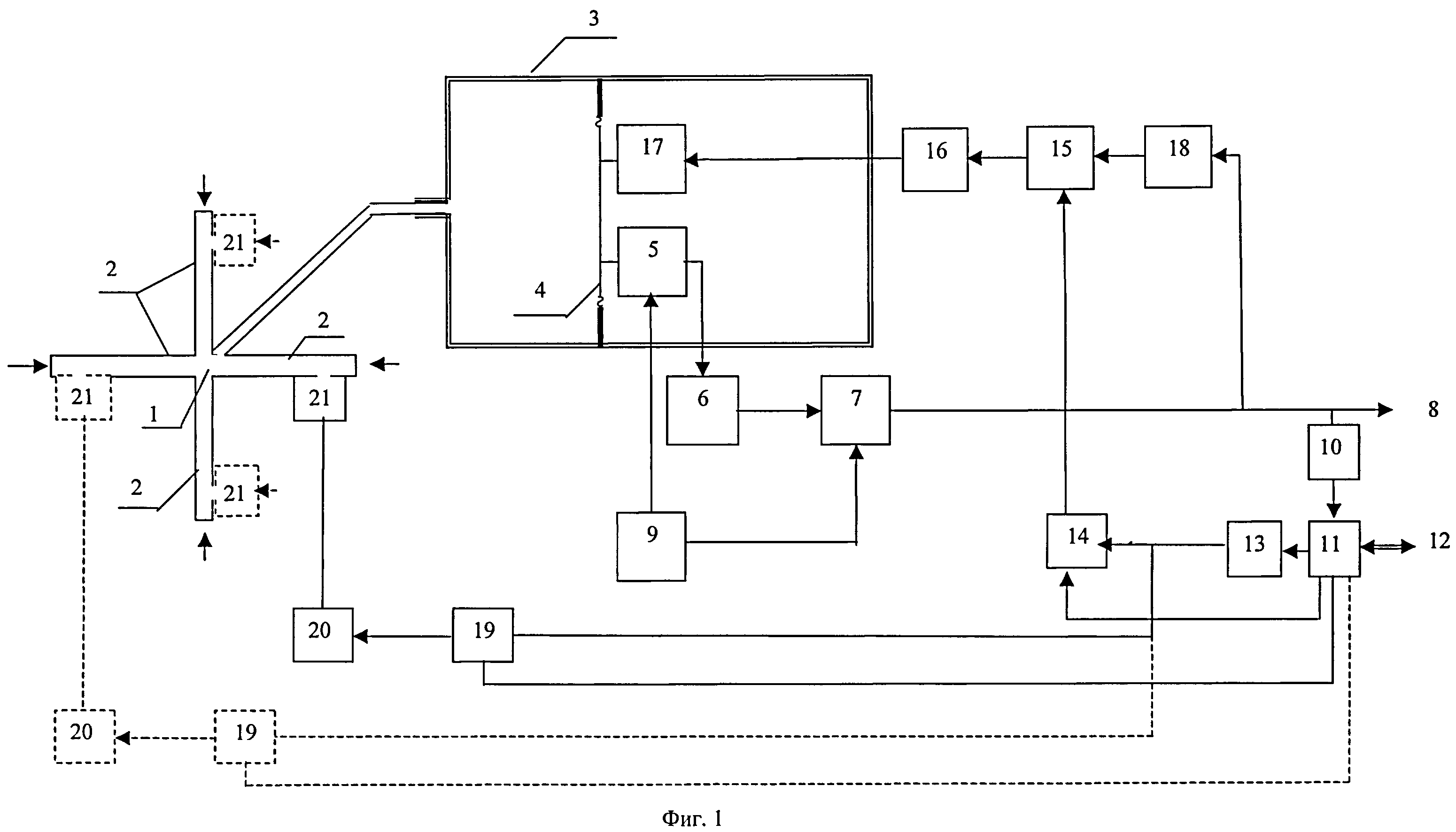
На фиг. 1 представлено устройство, обеспечивающее требуемый технический результат.
Принятые обозначения:
1 - акустический фильтр; 2 - секция акустического фильтра; 3 - корпус; 4 - чувствительный элемент; 5 - датчик; 6 - полосовой усилитель; 7 - демодулятор; 8 - аналоговый выход устройства; 9 - генератор; 10 - аналого-цифровой преобразователь; 11 - микропроцессор; 12 - цифровой порт микропроцессора; 13 - цифроаналоговый преобразователь; 14 - первый ключ; 15 - сумматор; 16 - первый усилитель; 17 - первый преобразователь электрического сигнала в механические колебания; 18 - фильтр; 19 - (N+1) ключ; 20 - (N+1) усилитель; 21 - (N+1) преобразователь электрического сигнала в механические колебания.
Устройство, представленное на фиг.1, содержит акустический фильтр 1 с секциями акустического фильтра 2; корпус 3, чувствительный элемент 4, связанный с окружающей средой и средой внутри корпуса 3, последовательно соединенные датчик 5 перемещения чувствительного элемента 4, полосовой усилитель 6 и демодулятор 7, подключенный к аналоговому выходу 8 устройства, а также генератор 9, подключенный к датчику 5 перемещения чувствительного элемента 4 и демодулятору 7, последовательно соединенные аналого-цифровой преобразователь 10, микропроцессор 11 с цифровым портом 12, цифроаналоговый преобразователь 13, первый ключ 14, сумматор 15, первый усилитель 16 и первый преобразователь 17 электрического сигнала в механические колебания, связанный с чувствительным элементом 4, фильтр 18, подключенный входом к демодулятору 7, а выходом - ко второму входу сумматора, а для каждой N секции - последовательно соединенные (N+1) ключ 19, (N+1) усилитель 20 и (N+1) преобразователь 21 электрического сигнала в механические колебания, установленный на входе в N секцию акустического фильтра 2, причем вход аналого-цифрового преобразователя подключен к демодулятору 7, входы ключей подключены к цифроаналоговому преобразователю 13, а управляющими входами ключи подключены к микропроцессору 11.
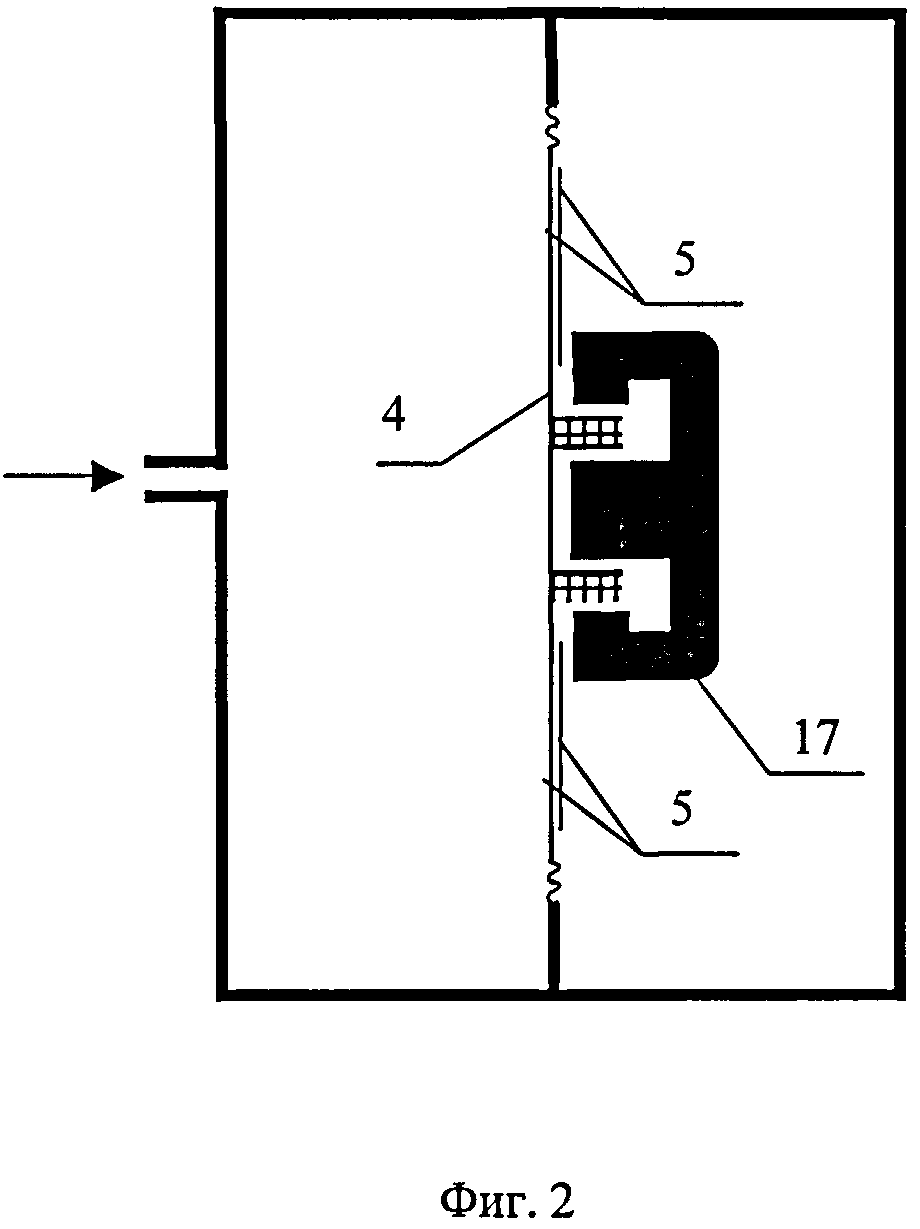
На фиг. 2 представлен один из возможных примеров реализации устройства с емкостным датчиком 5 перемещения чувствительного элемента 4 (мембраны) и электродинамическим преобразователем 17 электрического сигнала в механические колебания мембраны 4, используемой в качестве первого электрода емкостного датчика 5 (в другом варианте исполнения первый электрод емкостного датчика может быть изолирован от мембраны и наклеен на нее). Второй электрод емкостного датчика 5 неподвижен.
Устройство, представленное на фиг. 1, работает следующим образом. Акустический фильтр 1 с секциями 2 связан с корпусом 3. Чувствительный элемент 4 закреплен в корпусе 3 между окружающей средой и корпусом, содержащим опорную среду, так, что изменения давления окружающей среды приводят к смещению чувствительного элемента 4, в качестве которого могут быть использованы мембрана, сильфон или пластинка на подвесе. Смещение чувствительного элемента 4 относительно нейтрального положения приводит к изменению параметра (амплитуда, частота, фаза, длительность импульса) электрического сигнала на выходе датчика 5, на который электрический сигнал поступает от генератора 9. С выхода датчика 5 сигнал поступает через полосовой усилитель 6 на демодулятор 7, на который также подается опорный сигнал от генератора 9, благодаря чему на выходе демодулятора 7, подключенном к аналоговому выходу 8 устройства, формируется аналоговый сигнал, амплитуда которого зависит от смещения чувствительного элемента 4. С выхода демодулятора 7 аналоговый сигнал поступает на фильтр 18, формирующий требуемую частотную характеристику устройства и далее, через сумматор 15, поступает на первый усилитель 16, обеспечивающий требуемую амплитуду сигнала для работы первого преобразователя 17 электрического сигнала в механические колебания. Первый преобразователь 17 электрического сигнала в механические колебания связан с чувствительным элементом 4 механически или воздействует на чувствительный элемент 4 через среду, вызывая его перемещения. Таким образом осуществляется отрицательная обратная связь, уменьшающая перемещение чувствительного элемента 4, увеличивающая динамический диапазон устройства и расширяющая частотный диапазон. Это повышает точность измерения в более широком диапазоне амплитуд входных инфразвуковых сигналов. Кроме того, для повышения точности измерений предусмотрена калибровка устройства эталонными синусоидальными инфразвуковыми сигналами. Для этого в памяти микропроцессора 11 размещен массив чисел, например цифровой образ синусоиды. При поступлении от пользователя через цифровой порт 12 команды «калибровка», содержащей задание амплитуды и частоты, числа цифрового массива умножаются на коэффициент, соответствующий заданной амплитуде, и массив чисел выдается в цифроаналоговый преобразователь 13 с заданной частотой. При подаче от микропроцессора сигнала на управляющий вход первого ключа 14 первый ключ замыкается и подает калибровочный синусоидальный сигнал, сформированный на выходе цифроаналогового преобразователя 13, через сумматор 15 и усилитель 16 на преобразователь 17 электрического сигнала в механические колебания, формирующий эталонные синусоидальные инфразвуковые сигналы.
При изменении амплитуды и частоты калибровочных сигналов, по напряжению на аналоговом выходе 8, известным характеристикам звеньев и известному напряжению и частоте калибровки проводится расчет амплитудной и амплитудно-частотной характеристик устройства.
При снятии сигнала с управляющего входа первого ключа и подаче на управляющий вход (N+1) ключа, (N+1) ключ 19 замыкается и подает калибровочный сигнал от цифроаналогового преобразователя 13 через (N+1) усилитель 20 на (N+1) преобразователь 21 электрического сигнала в механические колебания, формирующий эталонные синусоидальные инфразвуковые сигналы.
При изменении амплитуды и частоты калибровочных сигналов, по напряжению на аналоговом выходе 8, известным характеристикам звеньев и известному напряжению и частоте калибровки проводится расчет амплитудной и амплитудно-частотной характеристик устройства в целом, включая акустический фильтр (если включены все ключи 19) или отдельные секции. Это позволяет выявлять изменения, связанные с засорением или повреждением отдельных секций акустического фильтра.
Первый преобразователь 17 может быть установлен также с другой стороны чувствительного элемента 4, на корпусе или на перегородке между отсеками.
Устройство, представленное на фиг.2, работает следующим образом. Смещение чувствительного элемента 4 относительно неподвижного электрода датчика 5 приводит к изменению емкости датчика и появлению сигнала на аналоговом выходе устройства. Усиленный сигнал с аналогового выхода поступает на первый преобразователь 17 электрического сигнала в механические колебания, выполненный в виде электродинамического громкоговорителя, перемещающего мембрану (чувствительный элемент 4). Таким образом осуществляется отрицательная обратная связь, уменьшающая перемещение чувствительного элемента 4, увеличивающая динамический диапазон устройства и расширяющая частотный диапазон.
Источники информации
1. К.В.Кислов, Ю.А.Колесников, А.Ю.Марченков, Ю.О.Старовойт, Микробарометр, Авторское свидетельство SU 1769172 A1, G01V 1/16, G01L 23/00, 1990.
2. Микробарометр MB 2000, Техническое описание, Microbarometre MB 2000, Technical manual, Departement Analysed Surveillance de L'Environnement (DASE), 1998.
Устройство для преобразования неэлектрической величины в электрический сигнал
Сейсмометр
Широкополосное двухкомпонентное приемное антенное устройство
Блок излучателя нейтронов
Сейсмометр
Датчик абсолютного давления
Аксиальная электронная пушка
Устройство для определения направления на источник сигнала
Способ измерения интервалов времени между импульсами излучения
Широкополосное устройство для измерения напряженности электрического поля
Устройство для преобразования неэлектрической величины в электрический сигнал
Сейсмометр
Широкополосное двухкомпонентное приемное антенное устройство
Блок излучателя нейтронов
Сейсмометр
Датчик абсолютного давления
Аксиальная электронная пушка
Устройство для определения направления на источник сигнала
Способ измерения интервалов времени между импульсами излучения
Широкополосное устройство для измерения напряженности электрического поля

