Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
Вид РИД
Изобретение
Область техники
Изобретение относится к устройству управления транспортным средством, транспортному средству и способу управления транспортным средством.
Уровень техники
Обычно, водители транспортных средств управляют транспортными средствами на основе, по меньшей мере, своего собственного восприятия. Водитель воспринимает относительную взаимосвязь между транспортным средством, которым водитель управляет, т.е., основным транспортным средством, и объектом восприятия, который может восприниматься водителем, таким как движущееся впереди транспортное средство, которое едет впереди основного транспортного средства, или т.п., на основе стимулирующего воздействия на органы чувств водителя, такие как глаза, уши и т.д. Согласно восприятию водитель выполняет ускорение или торможение транспортного средства посредством приведения в действие педали акселератора, торможение транспортного средства посредством приведения в действие педали тормоза или рычага переключения передач, разворот или поворот транспортного средства посредством управления рулевым колесом и т.д. Т.е., водитель управляет транспортным средством, ведя транспортное средство на основе собственного водительского восприятия.
Кроме того, например, в публикации японской патентной заявки № 2003-208602 (JP-A-2003-208602) раскрыто устройство управления транспортным средством, которое выполняет управление транспортным средством, при котором транспортное средство управляется, используя в качестве входного значения относительную взаимосвязь между объектом восприятия и основным транспортным средством. Устройство управления транспортным средством, которое раскрыто в JP-A-2003-208602, например, использует в качестве входных значений фактическое относительное расстояние и фактическую относительную скорость между основным транспортным средством и движущимся впереди транспортным средством, и выполняет управление торможением для торможения транспортного средства на основе относительного соотношения, которое является соотношением между относительным расстоянием и относительной скоростью, или т.п.
Кроме того, вышеупомянутая относительная взаимосвязь согласно восприятию движения может отклоняться от фактической относительной взаимосвязи. Например, что касается относительного расстояния, водитель воспринимает относительное расстояние как более короткое, чем фактическое относительное расстояние, на величину, которая тем больше, чем длиннее фактическое относительное расстояние. Кроме того, водитель воспринимает относительную скорость большей, чем фактическая относительная скорость, на величину, которая тем больше, чем больше скорость основного транспортного средства. Следовательно, что касается управления транспортным средством, выполняемым устройством управления транспортным средством, которое описано в JP-A-2003-208602, момент управления или величина управляющего воздействия получаются, используя в качестве входного значения фактическую относительную взаимосвязь, которая отклоняется от относительной взаимосвязи на основе восприятия водителя. Следовательно, существует вероятность возникновения дискомфорта у водителя.
Сущность изобретения
Изобретение предлагает устройство управления транспортным средством, транспортное средство и способ управления транспортным средством, которые способны ограничивать дискомфорт, который возникает у водителя, посредством управления транспортным средством.
Устройство управления транспортным средством в соответствии с первым аспектом изобретения является устройством управления транспортным средством, которое управляет транспортным средством, используя в качестве входного значения фактическую относительную физическую величину, которая показывает относительную взаимосвязь между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, при этом транспортное средство управляется на основе управляющего значения, которое отражает воспринимаемую относительную физическую величину, которая является физической величиной, соответствующей фактической относительной физической величине, и которая является относительной физической величиной между транспортным средством и объектом восприятия, который воспринимается водителем.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом управляющее значение может относиться, по меньшей мере, к одному из момента управления и величины управляющего воздействия при управлении транспортным средством.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом фактическая относительная физическая величина может быть фактическим относительным расстоянием между объектом восприятия и транспортным средством, и воспринимаемая относительная физическая величина может быть воспринимаемым относительным расстоянием, которое является относительным расстоянием между транспортным средством и объектом восприятия, который воспринимается водителем.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом воспринимаемое относительное расстояние может быть меньшим, чем фактическое относительное расстояние, на величину, которая больше, если фактическое относительное расстояние более длинное.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом воспринимаемое относительное расстояние может быть получено с помощью формулы (1) ниже:
Ds=Drn ... (1)
где Ds - воспринимаемое относительное расстояние, Dr - фактическое относительное расстояние, и n находится в диапазоне 0<n<1.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом n в формуле (1) может быть в диапазоне 0,7≤n≤0,8.
Кроме того, в устройстве управления транспортным средством в соответствии с первым аспектом воспринимаемое относительное расстояние получается с помощью формулы (2) ниже:
Ds=αlog(Dr/D0) ... (2)
где Ds - воспринимаемое относительное расстояние, Dr - фактическое относительное расстояние, D0 - максимальное относительное расстояние, которое является предельным значением, при котором приближение объекта восприятия к транспортному средству неприемлемо для водителя транспортного средства, и α - константа.
Устройство управления транспортным средством в соответствии со вторым аспектом изобретения является устройством управления транспортным средством, которое управляет транспортным средством, используя в качестве входных значений фактическое относительное расстояние и фактическую относительную скорость между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, при этом транспортное средство управляется на основе управляющего значения, которое отражает воспринимаемое относительное соотношение, которое является соотношением между воспринимаемым относительным расстоянием, т.е., физической величиной, соответствующей фактическому относительному расстоянию, и которая является относительным расстоянием между транспортным средством и объектом восприятия, который воспринимается водителем, и одной из фактической относительной скорости и воспринимаемой относительной скорости, которая является физической величиной, соответствующей фактической относительной скорости, и которая показывает относительную скорость между транспортным средством и объектом восприятия, который воспринимается водителем.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом управляющее значение может относиться, по меньшей мере, к одному из момента времени управления и величины управляющего воздействия при управлении транспортным средством.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом, если управляющее значение относится к моменту времени управления, управление транспортным средством может начинаться, когда воспринимаемое относительное соотношение превышает пороговое значение.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом, пороговое значение может быть установлено на основе, по меньшей мере, одного из водителя и окружающей обстановки движения транспортного средства.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом, если пороговое значение устанавливается на основе водителя, пороговое значение может быть установлено на основе фактического относительного расстояния и фактической относительной скорости, имеющих место в момент срабатывания объекта срабатывания, который предусмотрен в транспортном средстве с тем, чтобы задействоваться водителем.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом воспринимаемое относительное расстояние может быть меньшим, чем фактическое относительное расстояние, на величину, которая больше, если фактическое относительное расстояние длиннее.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом воспринимаемое относительное расстояние может быть получено с помощью формулы (1) ниже:
Ds=Drn ... (1)
где Ds - воспринимаемое относительное расстояние, Dr - фактическое относительное расстояние, и n находится в диапазоне 0<n<1.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом n в формуле (1) может быть в диапазоне 0,7≤n≤0,8.
Кроме того, в устройстве управления транспортным средством в соответствии со вторым аспектом воспринимаемое относительное расстояние может быть получено с помощью формулы (2) ниже:
Ds=αlog(Dr/D0) ... (2)
где Ds - воспринимаемое относительное расстояние, Dr - фактическое относительное расстояние, D0 - максимальное относительное расстояние, которое является предельным значением, при котором приближение объекта восприятия к транспортному средству неприемлемо для водителя транспортного средства, и α - это константа.
Устройство управления транспортным средством в соответствии с третьим аспектом изобретения является устройством управления транспортным средством, которое управляет транспортным средством, используя в качестве входного значения фактическое относительное расстояние между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, при этом транспортное средство управляется на основе значения, которое меньше, чем фактическое относительное расстояние, на величину, которая больше, если фактическое относительное расстояние длиннее.
Транспортное средство в соответствии с четвертым аспектом изобретения является транспортным средством, которое выполняет управление предотвращением/смягчением столкновения, чтобы, по меньшей мере, избегать столкновения транспортного средства с другим транспортным средством, которое располагается спереди транспортного средства, и которое воспринимается водителем транспортного средства, и смягчать удар, когда столкновение происходит, на основе фактического относительного расстояния между транспортным средством и другим транспортным средством, при этом управление предотвращением/смягчением столкновения начинается более простым образом, когда фактическое относительное расстояние является относительно длинным, чем когда фактическое относительное расстояние является относительно коротким.
Способ управления транспортным средством в соответствии с пятым аспектом изобретения является способом управления транспортным средством посредством использования в качестве входного значения фактической относительной физической величины, которая показывает относительную взаимосвязь между транспортным средством и объектом восприятия, который находится за пределами транспортного средства, и который воспринимается водителем транспортного средства, способ включает в себя управление транспортным средством на основе управляющего значения, которое отражает воспринимаемую относительную физическую величину, которая является физической величиной, соответствующей фактической относительной физической величине, и которая является относительной физической величиной между транспортным средством и объектом восприятия, который воспринимается водителем.
Способ управления транспортным средством в соответствии с шестым аспектом изобретения является способом управления транспортным средством, посредством использования в качестве входных значений фактического относительного расстояния и фактической относительной скорости между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, способ включает в себя управление транспортным средством на основе управляющего значения, которое отражает воспринимаемое относительное соотношение, которое является соотношением между воспринимаемым относительным расстоянием, которое является физической величиной, соответствующей фактическому относительному расстоянию, и которое является относительным расстоянием между транспортным средством и объектом восприятия, который воспринимается водителем, и одной из фактической относительной скорости и воспринимаемой относительной скорости, которая является физической величиной, соответствующей фактической относительной скорости, и которая показывает относительную скорость между транспортным средством и объектом восприятия, который воспринимается водителем.
Способ управления транспортным средством в соответствии с седьмым аспектом изобретения является способом управления транспортным средством посредством использования в качестве входного значения фактического относительного расстояния между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, способ включает в себя управление транспортным средством на основе значения, которое меньше, чем фактическое относительное расстояние, на величину, которая больше, если фактическое относительное расстояние длиннее.
Устройства управления транспортным средством и способы управления транспортным средством в соответствии с вышеупомянутыми аспектами изобретения, каждый, выполняют управление транспортным средством на основе воспринимаемой относительной физической величины, которая получается на основе фактической относительной физической величины, так что управление транспортным средством, которое соответствует восприятию водителя, выполняется. Следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Кроме того, устройства управления транспортным средством и способы управления транспортным средством в соответствии с вышеупомянутыми аспектами изобретения выполняют управление транспортным средством на основе воспринимаемого относительного соотношения, которое является соотношением между воспринимаемым относительным расстоянием, полученным на основе фактического относительного расстояния, и фактической относительной скоростью, так что управление транспортным средством, которое соответствует восприятию водителя, выполняется. Следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Кроме того, транспортное средство в соответствии с вышеупомянутыми аспектами более вероятно должно начинать управление предотвращением/смягчением столкновения, когда фактическое относительное расстояние является относительно длинным, чем когда фактическое относительное расстояние является относительно коротким, так что управление предотвращением/смягчением столкновения, которое соответствует восприятию водителя, будет выполняться. Следовательно, дискомфорт, возникающий у водителя при управлении предотвращением/смягчением столкновения, может быть ограничен.
Кроме того, устройства управления транспортным средством и способы управления транспортным средством в соответствии с вышеупомянутыми аспектами выполняют управление транспортным средством на основе значения, которое меньше, чем фактическое относительное расстояние, на величину, которая является большей, если фактическое относительное расстояние более длинное. Следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Кроме того, согласно вышеупомянутым аспектам изобретения, если существует множество водителей, которые являются водителями транспортного средства, пороговое значение изменяется от одного к другому водителю, так что дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Кроме того, согласно вышеупомянутым аспектам пороговое значение может быть изменено в зависимости от окружающей обстановки при движении транспортного средства, например, может отличаться между окружающей обстановкой при движении, в которой водитель ощущает напряжение, и окружающей обстановкой при движении, в которой водитель не ощущает напряжения. Таким образом, управление транспортным средством может выполняться так, чтобы следовать изменениям в восприятии водителем окружающей обстановки движения транспортного средства, и, следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Краткое описание чертежей
Упомянутые выше и/или дополнительные цели, признаки и преимущества изобретения станут более понятны из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые элементы, и на которых:
Фиг. 1 - диаграмма, показывающая пример общей конструкции устройства управления транспортным средством в соответствии с вариантом осуществления изобретения;
Фиг. 2 - диаграмма, показывающая соотношение между воспринимаемым относительным расстоянием и фактическим относительным расстоянием в соответствии с вариантом осуществления изобретения;
Фиг. 3 - диаграмма, показывающая другое соотношение между воспринимаемым относительным расстоянием и фактическим относительным расстоянием в соответствии с вариантом осуществления изобретения;
Фиг. 4 - диаграмма, показывающая соотношение между фактической относительной скоростью и воспринимаемой относительной скоростью в соответствии с вариантом осуществления изобретения;
Фиг. 5 - диаграмма, показывающая соотношение между фактическим относительным расстоянием и фактической относительной скоростью в соответствии с вариантом осуществления изобретения;
Фиг. 6 - диаграмма, показывающая соотношение между воспринимаемым относительным расстоянием и воспринимаемой относительной скоростью в соответствии с вариантом осуществления изобретения;
Фиг. 7 - диаграмма, показывающая соотношения между воспринимаемым относительным расстоянием и воспринимаемой относительной скоростью касательно отдельных водителей в соответствии с вариантом осуществления изобретения;
Фиг. 8 - диаграмма, показывающая соотношения между воспринимаемой относительной скоростью и фактическим/воспринимаемым относительным соотношением отдельных водителей в соответствии с вариантом осуществления изобретения;
Фиг. 9 - диаграмма, показывающая соотношение между воспринимаемой относительной скоростью и фактическим/воспринимаемым относительным соотношением водителя в соответствии с вариантом осуществления изобретения; и
Фиг. 10 - блок-схема последовательности операций, показывающая способ управления транспортным средством, выполняемый устройством управления транспортным средством в соответствии с вариантом осуществления изобретения.
Подробное описание вариантов осуществления изобретения
Изобретение будет описано подробно далее в данном документе со ссылкой на прилагаемые чертежи. Следует отметить, что варианты осуществления, описанные ниже, не ограничивают изобретение. Кроме того, составные элементы вариантов осуществления, описанных ниже, включают в себя элементы, которые могут легко быть представлены обычным специалистом в данной области техники, или элементы, которые, по существу, являются теми же, что и элементы, которые могут легко быть представлены обычным специалистом в данной области техники.
Фиг. 1 - это диаграмма, показывающая пример общей конструкции устройства управления транспортным средством в соответствии с вариантом осуществления изобретения. Фиг. 2 - это диаграмма, показывающая соотношение между воспринимаемым относительным расстоянием и фактическим относительным расстоянием в соответствии с вариантом осуществления изобретения. Фиг. 3 - это диаграмма, показывающая другое соотношение между воспринимаемым относительным расстоянием и фактическим относительным расстоянием в соответствии с вариантом осуществления изобретения. Фиг. 4 - это диаграмма, показывающая соотношение между воспринимаемой относительной скоростью и фактической относительной скоростью в соответствии с вариантом осуществления изобретения. Фиг. 5 - это диаграмма, показывающая соотношение между фактическим относительным расстоянием и фактической относительной скоростью в соответствии с вариантом осуществления изобретения. Фиг. 6 - это диаграмма, показывающая соотношение между воспринимаемым относительным расстоянием и воспринимаемой относительной скоростью в соответствии с вариантом осуществления изобретения. Фиг. 7 - это диаграмма, показывающая соотношения между воспринимаемым относительным расстоянием и воспринимаемой относительной скоростью касательно отдельных водителей в соответствии с вариантом осуществления изобретения. Фиг. 8 - это диаграмма, показывающая соотношения между воспринимаемой относительной скоростью и фактическим/воспринимаемым относительным соотношением отдельных водителей в соответствии с вариантом осуществления изобретения. Фиг. 9 - это диаграмма, показывающая соотношение между воспринимаемой относительной скоростью и фактическим/воспринимаемым относительным соотношением водителя в соответствии с вариантом осуществления изобретения.
Транспортное средство, в котором водитель едет (далее в данном документе просто именуемое "основным транспортным средством CA"), оснащено, по меньшей мере, устройством 1 управления транспортным средством, которое показано на фиг. 1. Устройство 1 управления транспортным средством включает в себя датчик 2 скорости транспортного средства, датчик 3 расстояния, электронный блок управления (ЭБУ) 4 и устройство 5 торможения. Устройство 1 управления транспортным средством управляет транспортным средством, используя в качестве входного значения фактическую относительную физическую величину, которая показывает относительную взаимосвязь между основным транспортным средством CA и объектом TA восприятия, который находится за пределами основного транспортного средства CA и который воспринимается водителем. Следует отметить здесь, что управление транспортным средством в этом варианте осуществления является управлением торможением для торможения основного транспортного средства CA (включающим в себя управление для торможения транспортного средства из состояния, в котором водитель не воздействует на педаль тормоза, и управление для дополнительного торможения транспортного средства из состояния, в котором водитель задействует педаль тормоза). Управление торможением выполняется, например, как часть следящего управления, представляемого посредством адаптивной системы "круиз-контроль" или т.п., заставляя основное транспортное средство CA следовать за идущим впереди транспортным средством, которое является объектом TA восприятия, или как часть управления предотвращением/смягчением столкновения, предоставляемого системой предаварийной безопасности, для избегания столкновения основного транспортного средства CA с препятствием (включающим в себя движущийся объект и неподвижный объект), которое является объектом TA восприятия, расположенным в направлении движения основного транспортного средства CA, например, его переднем направлении, или смягчения удара во время столкновения. Т.е., основное транспортное средство CA в этом варианте осуществления выполняет управление торможением как часть управления предотвращением/смягчением столкновения, которое предназначено для избегания столкновения основного транспортного средства CA с транспортным средством, которое является объектом TA восприятия, присутствующим впереди основного транспортного средства CA, или смягчения удара во время столкновения. Объект TA восприятия в данном документе означает любой объект, который находится за пределами основного транспортного средства TA и который воспринимается водителем, несмотря на то, воспринимается ли он непосредственно, или косвенно, и включает в себя движущиеся объекты (например, транспортные средства, движущиеся поблизости от основного транспортного средства CA, пешеходы вокруг основного транспортного средства CA и т.д.), и неподвижные объекты (например, светофоры, находящиеся вокруг основного транспортного средства CA (включающие в себя текущие состояния светофоров), дорожные знаки, такие как знак "уступи дорогу" и т.п., дорожные ограждения, инфраструктурные объекты, повороты и перекрестки, отличаемые от вышеупомянутых объектов, и т.д.).
Датчик 2 скорости транспортного средства обнаруживает скорость Vm [м/с] основного транспортного средства CA. Датчик 2 скорости транспортного средства соединяется с ЭБУ 4. Обнаруженная скорость Vm транспортного средства выводится в ЭБУ 4, и ЭБУ 4 получает скорость Vm транспортного средства. Полученная скорость Vm транспортного средства используется частью 42 вычисления воспринимаемой относительной скорости (описанной ниже), чтобы получать воспринимаемую относительную скорость Vs [м/с]. Датчик 2 скорости транспортного средства является датчиками скорости колес, которые устанавливаются на каждом из дорожных колес основного транспортного средства CA. Скорость каждого колеса, обнаруженная соответствующим из датчиков скорости колес, выводится в ЭБУ 4. На основе скоростей колес ЭБУ 4 вычисляет скорость Vm основного транспортного средства CA и, таким образом, получает скорость Vm транспортного средства. Между прочим, датчик 2 скорости транспортного средства не ограничивается упомянутыми датчиками скоростей колес. Кроме того, вместо получения скорости Vm транспортного средства от датчика 2 скорости транспортного средства также допустимо вычислять и получать скорость Vm основного транспортного средства CA на основе обнаруженной датчиком скорости вращения вращающегося тела, которое является частью пути передачи мощности или т.п., который передает движущую силу, сформированную источником движущей силы (например, двигателем, электродвигателем и т.д.) основного транспортного средства CA, или на основе позиционных данных об основном транспортном средстве CA, которые обнаруживаются датчиком, представленным посредством GPS.
Датчик 3 расстояния обнаруживает фактическое относительное расстояние Dr [м], которое является фактическим относительным расстоянием между основным транспортным средством CA и объектом TA восприятия. Датчик 3 расстояния соединен с ЭБУ 4, так что обнаруженное фактическое относительное расстояние Dr выводится в ЭБУ 4, и ЭБУ 4 получает фактическое относительное расстояние Dr. Полученное фактическое относительное расстояние Dr используется частью 41 вычисления воспринимаемого относительного расстояния (описанной ниже), чтобы получать воспринимаемое относительное расстояние Ds [м]. Датчик 3 расстояния в этом варианте осуществления является радаром миллиметрового диапазона, который обнаруживает фактическое относительное расстояние Dr и фактическую относительную скорость Vr [м/с] объекта TA восприятия, которые являются относительными физическими величинами, которые показывают относительную взаимосвязь между основным транспортным средством CA и объектом TA восприятия, посредством способа обнаружения, который использует миллиметровые волны. Радар миллиметрового диапазона устанавливается, например, в центральной части лобовой части основного транспортного средства CA, например, в передней решетке. Радар миллиметрового диапазона излучает миллиметровые волны с передней стороны основного транспортного средства CA в предварительно определенном радиусе действия в направлении движения основного транспортного средства CA и принимает миллиметровые волны, отраженные от объекта TA восприятия, который находится в направлении движения основного транспортного средства CA. Затем, радар миллиметрового диапазона обнаруживает фактическое относительное расстояние Dr, измеряя время от момента излучения до приема миллиметровых волн и вычисляя расстояние от основного транспортного средства CA или радара миллиметрового диапазона до объекта TA восприятия, и затем выводит обнаруженное фактическое относительное расстояние Dr в ЭБУ 4. Кроме того, радар миллиметрового диапазона, с помощью эффекта Доплера, обнаруживает фактическую относительную скорость Vr, вычисляя разницу скорости между скоростью Vm основного транспортного средства CA, оснащенного радаром миллиметрового диапазона, и скоростью Vt транспортного средства объекта TA восприятия, который находится в направлении движения основного транспортного средства CA, и затем выводит обнаруженную фактическую относительную скорость Vr в ЭБУ 4. В этой связи датчик 3 расстояния не ограничивается радаром миллиметрового диапазона, а может также быть, например, радаром, который использует лазер, инфракрасные лучи и т.д., или устройством распознавания изображения, которое вычисляет фактическое относительное расстояние Dr на основе данных об изображениях видов в направлении движения основного транспортного средства CA, которые снимаются устройством захвата изображения, таким как CCD-камера или т.п., и т.д. Кроме того, в случае, когда фактическая относительная скорость Vr не может быть обнаружена датчиком 3 расстояния, ЭБУ 4 может также вычислять и получать фактическую относительную скорость Vr на основе скорости Vm транспортного средства, обнаруженной датчиком 2 скорости транспортного средства, и фактического относительного расстояния Dr, обнаруженного датчиком 3 расстояния. В этом случае обнаруженное фактическое относительное расстояние Dr используется ЭБУ 4, чтобы получать фактическую относительную скорость Vr.
ЭБУ 4 выполняет управление транспортным средством на основе управляющего значения, которое отражает воспринимаемую относительную физическую величину, которая является физической величиной, соответствующей фактической относительной физической величине, которая является входным значением, и которая также является относительной физической величиной между основным транспортным средством CA и объектом TA восприятия, которая основывается на восприятия водителя. ЭБУ 4 в этом варианте осуществления получает воспринимаемое относительное расстояние Ds, которое является относительным расстоянием между транспортным средством и объектом восприятия согласно восприятию водителем, на основе фактического относительного расстояния Dr, которое является входным значением. Кроме того, в этом варианте осуществления, ЭБУ 4 получает воспринимаемую относительную скорость Vs, которая является относительной скоростью между основным транспортным средством CA и объектом TA восприятия согласно восприятию водителя, на основе фактической относительной скорости Vr, которая является входным значением. Кроме того, ЭБУ 4 получает воспринимаемое относительное соотношение X, которое является связанным с восприятием вычисленным значением, на основе полученного воспринимаемого относительного расстояния Ds и полученной воспринимаемой относительной скорости Vs. Т.е., ЭБУ 4 в этом варианте осуществления выполняет управление транспортным средством на основе управляющего значения, которое отражает воспринимаемое относительное соотношение X, которое является соотношением между воспринимаемым относительным расстоянием Ds и воспринимаемой относительной скоростью Vs. ЭБУ 4 имеет функции, такие как часть 41 вычисления воспринимаемого относительного расстояния, часть 42 вычисления воспринимаемой относительной скорости, часть 43 вычисления воспринимаемого относительного соотношения и часть 44 определения времени управления. В данном случае, аппаратная конструкция ЭБУ 4, состоящая из ЦП (центрального процессора), который, главным образом, выполняет вычислительные процессы, памяти, которая хранит программы и информацию (ОЗУ, такое как статическое ОЗУ или т.п., ПЗУ (постоянного запоминающего устройства), такого как ЭСППЗУ или т.п.), интерфейсов ввода/вывода и т.д. Таким образом, аппаратная конструкция ЭБУ 4, по существу, является такой же, что и у множества ЭБУ, которые установлены в существующих транспортных средствах, и, следовательно, не будет описываться подробно ниже.
Часть 41 вычисления воспринимаемого относительного расстояния получает воспринимаемое относительное расстояние Ds на основе полученного фактического относительного расстояния Dr. Водитель основного транспортного средства CA подвергается ложному восприятию, что чем длиннее фактическое относительное расстояние Dr, тем больше относительное расстояние кажется короче, чем фактическое относительное расстояние Dr. Например, когда водитель видит придорожные столбы, которые располагаются с равными интервалами в направлении движения основного транспортного средства CA, чем дальше придорожные столбы находятся, тем меньшими кажутся интервалы между придорожными столбами, так что водитель ошибочно воспринимает положения отдаленных придорожных столбов более близкими, чем их фактические положения. Следовательно, если управление транспортным средством выполняется на основе полученного фактического относительного расстояния Dr, существует вероятность того, например, что, если фактическое относительное расстояние Dr является длинным, управление транспортным средством может выполняться с моментом времени управления и величиной управляющего воздействия, которые отличаются от момента времени и величины управляющего воздействия транспортного средства (времени срабатывания и величины срабатывания), основанных на восприятии водителя основного транспортного средства CA. Следовательно, для того, чтобы изменять относительное расстояние, которое является относительной физической величиной, которая показывает относительную взаимосвязь между объектом TA восприятия и основным транспортным средством CA, которая может восприниматься водителем, на значение, основанное на восприятии водителя, часть 41 вычисления воспринимаемого относительного расстояния вычисляет воспринимаемое относительное расстояние Ds, так что вычисленное значение меньше, чем фактическое относительное расстояние Dr, на величину, которая тем больше, чем длиннее полученное фактическое относительное расстояние Dr. В этом варианте осуществления часть 41 вычисления воспринимаемого относительного расстояния вычисляет воспринимаемое относительное расстояние Ds на основе полученного фактического относительного расстояния Dr с помощью формулы (3) ниже. В формуле (3) n находится в диапазоне 0<n<1. Кроме того, n предпочтительно должно быть приблизительно равно 0,7-0,8.
Ds=Drn ... (3)
Как показано на фиг. 2, воспринимаемое относительное расстояние Ds, которое вычисляется из полученного фактического относительного расстояния Dr с помощью вышеприведенной формулы (3), становится меньше, чем полученное фактическое относительное расстояние Dr, на величину, которая тем больше, чем длиннее полученное фактическое относительное расстояние Dr (которое показано кривой A1 на фиг. 2), в сравнении со случаем, где полученное фактическое относительное расстояние Dr используется непосредственно в качестве воспринимаемого относительного расстояния Ds (которое показано прямой линией B на фиг. 2). Т.е., выполняя управление транспортным средством на основе управляющего значения, которое отражает воспринимаемое относительное расстояние Ds, управление транспортным средством, которое согласуется с восприятием водителя основного транспортного средства CA, может выполняться. Следовательно, управление транспортным средством, выполняемое устройством 1 управления транспортным средством, согласуется с ощущением водителя, и, следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Здесь, что касается ложного восприятия относительного расстояния водителем основного транспортного средства CA, допустимо принимать во внимание максимальное относительное расстояние D0 [м], которое является предельным значением, при котором приближение объекта TA восприятия к основному транспортному средству CA неприемлемо для водителя. Т.е., если воспринимаемое относительное расстояние Ds вычисляется так, чтобы быть меньше, чем полученное фактическое относительное расстояние Dr, на величину, которая тем больше, чем длиннее фактическое относительное расстояние Dr, и так, чтобы не становиться меньше, чем максимальное относительное расстояние D0, и если управление транспортным средством выполняется на основе воспринимаемого относительного расстояния Ds, вычисленного таким образом, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Например, воспринимаемое относительное расстояние Ds может быть вычислено из полученного фактического относительного расстояния Dr и максимального относительного расстояния D0 [м], которое является предельным значением, при котором приближение объекта TA восприятия к основному транспортному средству CA неприемлемо для водителя, с помощью формулы (4) ниже. Максимальное относительное расстояние D0 предпочтительно должно быть равно примерно 4 м. Константа α в формуле (4) предпочтительно должна быть равна приблизительно 20. В данном случае максимальное относительное расстояние D0 может быть установлено заблаговременно как постоянное значение или может также быть установлено отдельно для отдельных водителей основного транспортного средства CA.
Ds=αlog(Dr/D0) ... (4)
Как показано на фиг. 3, воспринимаемое относительное расстояние Ds, которое вычисляется из полученного фактического относительного расстояния Dr и установленного максимального относительного расстояния D0 с помощью вышеприведенной формулы (4), становится меньше, чем полученное фактическое относительное расстояние Dr, на величину, которая тем больше, чем длиннее фактическое относительное расстояние Dr, и не становится меньше, чем максимальное относительное расстояние D0 (как показано кривой A2 на фиг. 3), в сравнении со случаем, где полученное фактическое относительное расстояние Dr непосредственно используется в качестве воспринимаемого относительного расстояния Ds (как показано прямой линией B на фиг. 3). Т.е., если управление транспортным средством выполняется на основе воспринимаемого относительного расстояния Ds, которое является воспринимаемой относительной физической величиной, возможно выполнять управление транспортным средством с моментом времени управления и величиной управляющего воздействия, которые согласуются с восприятием водителя основного транспортного средства CA. Следовательно, управление транспортным средством, выполняемое устройством 1 управления транспортным средством, согласуется с ощущением водителя, и, следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть дополнительно ограничен.
Часть 42 вычисления воспринимаемой относительной скорости получает воспринимаемую относительную скорость Vs на основе полученной фактической относительной скорости Vr. Водитель основного транспортного средства CA ошибочно воспринимает относительную скорость как большую, чем фактическая относительная скорость Vr, на величину, которая тем больше, чем больше скорость Vm основного транспортного средства CA. Как показано на фиг. 4, воспринимаемая относительная скорость Vs (показанная прямой линией C1 на фиг. 4) для произвольной фактической относительной скорости Vr, когда основное транспортное средство CA находится в неподвижном состоянии (Vm=0), отличается от воспринимаемой относительной скорости Vs (показанной прямой линией C2 на фиг. 4) для произвольной фактической относительной скорости Vr, когда основное транспортное средство CA движется (Vm>0). Например, будет рассмотрен случай, когда основное транспортное средство CA движется по обычной дороге со скоростью приблизительно 40 км/ч, и случай, когда основное транспортное средство CA движется по автомагистрали со скоростью 100 км/ч. Если фактическое относительное расстояние Dr является фиксированным, водитель ошибочно воспринимает относительную скорость большей в случае, когда основное транспортное средство CA движется по автомагистрали, чем в случае, когда основное транспортное средство CA движется по обычной дороге. Следовательно, если управление транспортным средством выполняется на основе полученной фактической относительной скорости Vr, существует риск того, что управление транспортным средством может выполняться с моментом времени управления и величиной управляющего воздействия, которые не соответствуют работе основного транспортного средства CA (моменту срабатывания и величине срабатывания) на основе восприятия водителя основного транспортного средства CA, например, когда скорость Vm основного транспортного средства CA является высокой. Следовательно, для того, чтобы относительная скорость, которая является относительной физической величиной, которая показывает относительную взаимосвязь между объектом TA восприятия, воспринимаемым водителем, и основным транспортным средством CA, становилась значением, основанным на восприятии водителя, часть 42 вычисления воспринимаемой относительной скорости вычисляет воспринимаемую относительную скорость Vs, так что вычисленная воспринимаемая относительная скорость Vs больше, чем фактическая относительная скорость Vr, на величину, которая тем больше, чем больше полученная скорость Vm основного транспортного средства CA. В этом варианте осуществления часть 42 вычисления воспринимаемой относительной скорости вычисляет воспринимаемую относительную скорость Vs из полученной фактической относительной скорости Vr и полученной фактической скорости Vm основного транспортного средства CA с помощью формулы (5) ниже. В формуле (5) β находится в диапазоне 0<β<1. Кроме того, β предпочтительно должно быть равно приблизительно 0,2. В данном случае, в этом варианте осуществления, фактическая относительная скорость Vr определяется как положительная в направлении, в котором объект TA восприятия и основное транспортное средство CA приближаются друг к другу.
Vs=Vr+βVm ... (5)
Воспринимаемая относительная скорость Vs, которая вычисляется из полученной фактической относительной скорости Vr и полученной скорости Vm основного транспортного средства CA с помощью формулы (5), больше, чем полученная фактическая относительная скорость Vr, на величину, которая тем больше, чем больше скорость Vm основного транспортного средства CA (см. прямые линии C1 и C2 на фиг. 4). Т.е., выполняя управление транспортным средством на основе управляющего значения, которое отражает воспринимаемую относительную скорость Vs, которая является воспринимаемой относительной физической величиной, т.е., на основе воспринимаемой относительной скорости Vs, возможно выполнять управление транспортным средством, которое согласуется с восприятием водителя основного транспортного средства CA. Следовательно, управление транспортным средством, выполняемое устройством 1 управления транспортным средством, согласуется с ощущением водителя, и, следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Ложное восприятие относительной скорости водителем основного транспортного средства CA вызывается, главным образом, скоростью Vm основного транспортного средства CA, а также вызывается относительным ускорением между объектом TA восприятия и основным транспортным средством CA, которое является относительной физической величиной. Т.е., если воспринимаемая относительная скорость Vs вычисляется на основе фактической относительной скорости Vr, скорости Vm основного транспортного средства CA и фактического относительного ускорения Ar (м/с2), и если управление транспортным средством выполняется на основе вычисленной воспринимаемой относительной скорости Vs, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть дополнительно ограничен.
Например, воспринимаемая относительная скорость Vs может также быть вычислена из полученной фактической относительной скорости Vr, полученной скорости Vm основного транспортного средства CA и фактического относительного ускорения Ar с помощью формулы (6) ниже. В формуле (6) δ находится в диапазоне 0<δ<1. Кроме того, δ предпочтительно должно быть равно приблизительно 1,0. В данном случае, в этом варианте осуществления, фактическое относительное ускорение Ar определяется как положительное в направлении, в котором объект TA восприятия и основное транспортное средство CA приближаются друг к другу. В данном случае, фактическое относительное ускорение Ar может быть вычислено посредством ЭБУ 4 из фактического относительного расстояния Dr, скорости Vm основного транспортного средства CA, фактической относительной скорости Vr, вычисленного или обнаруженного датчиком ускорения основного транспортного средства CA и т.д.
Vs=Vr+βVm+δAr ... (6)
Кроме того, воспринимаемая относительная скорость Vs может также вычисляться из полученной фактической относительной скорости Vr, полученной скорости Vm основного транспортного средства CA и ускорения Ap объекта TA восприятия с помощью формулы (7) ниже. Относительное ускорение, которое может быть причиной ложного восприятия относительной скорости водителем основного транспортного средства CA, является ускорением Ap объекта TA восприятия, которое изменяется независимо от операции, выполняемой водителем, в частности, ускорением Ap, знак которого минус (например, ускорение в случае, когда транспортное средство, находящееся перед основным транспортным средством CA, тормозит, и т.п.), т.е., ускорением Ap в направлении приближения к основному транспортному средству CA. Следовательно, фактическое относительное ускорение Ar может также быть заменено ускорением Ap объекта TA восприятия. В формуле (7) γ находится в диапазоне от 0,5 до 2. Кроме того, γ предпочтительно должно быть равно приблизительно 1,5. В данном случае, в этом варианте осуществления, ускорение Ap объекта TA восприятия определяется как положительное в направлении, в котором объект TA восприятия и основное транспортное средство CA приближаются друг к другу. В частности, ускорение Ap объекта TA восприятия может быть вычислено ЭБУ 4 из фактического относительного расстояния Dr, скорости Vm основного транспортного средства CA, фактической относительной скорости Vr, вычисленного или обнаруженного датчиком ускорения основного транспортного средства CA и т.д.
Vs=Vr+βVm+γAp ... (7)
Часть 43 вычисления воспринимаемого относительного соотношения получает воспринимаемое относительное соотношение X, которое является воспринимаемым вычисленным значением, которое получается на основе воспринимаемой относительной скорости Vs. В этом варианте осуществления часть 43 вычисления воспринимаемого относительного соотношения вычисляет соотношение между воспринимаемым относительным расстоянием Ds, полученным частью 41 вычисления воспринимаемого относительного расстояния, и воспринимаемой относительной скоростью Vs, полученной частью 42 вычисления воспринимаемой относительной скорости, в качестве воспринимаемого относительного соотношения X. Здесь, воспринимаемое относительное соотношение X - это воспринимаемое относительное расстояние Ds, поделенное на воспринимаемую относительную скорость Vs. Как описано выше, водитель основного транспортного средства CA подвержен ложному восприятию относительных физических величин, таких как относительное расстояние, относительная скорость и т.д. Как показано на фиг. 5, соотношение между фактическим относительным расстоянием Dr и фактической относительной скоростью Vr, когда основное транспортное средство CA управляется на основе восприятия водителя основного транспортного средства CA (например, в момент срабатывания педали тормоза (не показана), которая является объектом управления, который предусмотрен в основном транспортном средстве CA с тем, чтобы быть задействованным водителем), изменяется в зависимости от скорости Vm основного транспортного средства CA и не является постоянным, даже когда скорость Vm основного транспортного средства CA фиксирована (как показано кривой D1 (Vm=0) и кривой D2 (Vm>0), показанными на фиг. 5). Следовательно, если управление транспортным средством выполняется с фактическим относительным соотношением Y между полученным фактическим относительным расстоянием Dr и полученной фактической относительной скоростью Vr, являющейся постоянной (как показано прямой линией E на фиг. 5), существует вероятность того, что управление транспортным средством может выполняться с моментом управления и величиной управляющего воздействия, которые отличаются от работы транспортного средства (момента срабатывания и величины срабатывания) транспортного средства, которые основаны на восприятии водителем основного транспортного средства CA. Следовательно, часть 43 вычисления воспринимаемого относительного соотношения вычисляет воспринимаемое относительное соотношение X, которое является соотношением между воспринимаемым относительным расстоянием Ds и воспринимаемой относительной скоростью Vs, для того, чтобы относительное соотношение, которое является соотношением между относительным расстоянием и относительной скоростью, которые являются относительными физическими величинами, которые показывают относительную взаимосвязь между основным транспортным средством CA и объектом TA восприятия, воспринимаемым водителем, становилось значением, основанным на восприятии водителя. Воспринимаемое относительное соотношение X является постоянной величиной, если водитель не меняется, как показано на фиг. 6. Т.е., водитель основного транспортного средства CA управляет основным транспортным средством CA так, что относительное соотношение, т.е., время, которое затрачивается до тех пор, пока объект TA восприятия и основное транспортное средство CA не приблизятся друг к другу, является постоянным. Следовательно, использование воспринимаемого относительного соотношения X в управлении транспортным средством делает возможным выполнение управления транспортным средством, которое согласуется с восприятием водителя основного транспортного средства CA, несмотря на изменения в параметрах, которые используются, чтобы вычислять воспринимаемое относительное соотношение X, например, относительное расстояние, относительную скорость, скорость Vm основного транспортного средства CA, относительное ускорение и ускорение Ap объекта TA восприятия. Следовательно, управление транспортным средством, выполняемое устройством 1 управления транспортным средством, согласуется с ощущением водителя, и, следовательно, дискомфорт, возникающий у водителя при управлении транспортным средством, может быть ограничен.
Часть 44 определения момента управления выполняет управление транспортным средством на основе управляющего значения, которое отражает воспринимаемую относительную физическую величину. В этом варианте осуществления часть 44 определения момента управления выполняет управление транспортным средством на основе управляющего значения, которое отражает воспринимаемое относительное соотношение X. Часть 44 определения момента управления устанавливает воспринимаемое относительное соотношение X на основе воспринимаемого относительного расстояния Ds и воспринимаемой относительной скорости Vs, которые являются воспринимаемыми относительными физическими величинами, в качестве управляющего значения, относящегося к моменту управления торможением, и определяет момент управления торможением на основе управляющего значения. Т.е., в этом варианте осуществления, поскольку используется момент управления, который определяется на основе управляющего значения, которое отражает воспринимаемое относительное соотношение X (на основе воспринимаемого относительного расстояния Ds и воспринимаемой относительной скорости Vs), т.е., на основе воспринимаемого относительного соотношения X, управление торможением может выполняться с моментом управления, который согласуется с восприятием водителя основного транспортного средства CA. Часть 44 определения момента управления определяет, больше или нет воспринимаемое относительное соотношение X, вычисленное частью 43 вычисления воспринимаемого относительного соотношения (управляющее значение, которое отражает воспринимаемое относительное соотношение X), чем пороговое значение X0. Если определяется, что воспринимаемое относительное соотношение X больше, чем пороговое значение X0 (т.е., определяется, что воспринимаемое относительное соотношение X меньше или равно пороговому значению X0 в случае управления торможением), часть 44 определения момента управления начинает управление торможением.
Следует отметить здесь, что пороговое значение X0 может быть установлено как постоянное значение заранее или может также изменяться на основе, по меньшей мере, одного из водителя (например, личности или характеристики водителя) и окружения, в котором основное транспортное средство CA движется. В случае, когда пороговое значение X0 является постоянным значением, в этом варианте осуществления, отдельно для каждого водителя, фактическое относительное расстояние Dr и фактическая относительная скорость Vr во время срабатывания педали тормоза основного транспортного средства CA замеряются, в то время как изменения делаются в относительном расстоянии, относительной скорости, скорости Vm основного транспортного средства CA, относительном ускорении и ускорении Ap объекта TA восприятия различными способами, и фактические воспринимаемые относительные соотношения Xr могут быть вычислены на основе замеренных значений, и пороговое значение X0 может быть установлено заранее на основе среднего значения фактических воспринимаемых относительных соотношений Xr или т.п.
Кроме того, в случае, когда пороговое значение X0 изменяется на основе водителя основного транспортного средства CA, изменение выполняется на основе фактического относительного расстояния Dr и фактической относительной скорости Vr, возникающих во время срабатывания объекта управления, который предусмотрен в основном транспортном средстве CA с тем, чтобы быть задействованным водителем. Срабатывание педали тормоза, т.е., момент срабатывания тормоза, отличается от одного водителя к другому. Следовательно, как показано на фиг. 7, воспринимаемая относительная скорость Vs при неизменном воспринимаемом относительном расстоянии Ds отличается от одного водителя к другому, и момент срабатывания тормоза каждого водителя представляется наклоном прямой линии (Xr1, Xr2, Xr3 на фиг. 7), которая показывает соотношение между воспринимаемым относительным расстоянием Ds и воспринимаемой относительной скоростью Vs. Т.е., фактическое/воспринимаемое относительное соотношение Xr является постоянным значением для каждого водителя, но отличается по значению в зависимости от скорости срабатывания тормоза, как показано на фиг. 8. Водитель, который быстро выполняет операцию торможения, имеет большее фактическое/воспринимаемое относительное соотношение Xr, чем водитель, который медленно выполняет операцию торможения. Следовательно, в этом варианте осуществления, пороговое значение X0 устанавливается отдельно для каждого водителя с тем, чтобы соответствовать множеству водителей, которые управляют основным транспортным средством CA, и изменяется согласно разным водителям, которые управляют основным транспортным средством CA. Следовательно, даже если существует множество водителей, которые управляют основным транспортным средством CA, пороговое значение X0 изменяется согласно отдельным водителям, так что дискомфорт для водителя может быть ограничен.
Установка порогового значения X0 отдельно для каждого водителя выполняется следующим образом. Например, фактическое относительное расстояние Dr и фактическая относительная скорость Vr во время срабатывания педали тормоза основного транспортного средства CA замеряются, в то время как изменения выполняются в относительном расстоянии, относительной скорости, скорости Vm основного транспортного средства CA, относительном ускорении, ускорении Ap объекта TA восприятия различными способами, и множество фактических/воспринимаемых относительных соотношений Xr вычисляются для каждого водителя на основе результатов замера. Затем, нижнее предельное значение Xrmin фактического/воспринимаемого относительного соотношения Xr для водителя устанавливается в качестве порогового значения X0 для водителя, как показано на фиг. 9. Кроме того, пороговое значение X0 может также быть установлено на основе быстроты операции торможения. Например, пороговое значение X0f для водителей, которые быстро выполняют операцию торможения, может быть установлено заранее на основе фактического/воспринимаемого относительного соотношения Xr водителей, которые быстро выполняют операцию торможения, а пороговое значение X0m для водителей, которые обычно выполняют операцию торможения, может быть установлено заранее на основе фактического/воспринимаемого относительного соотношения Xr водителей, которые обычно выполняют операцию торможения, и пороговое значение X0s для водителей, которые медленно выполняют операцию торможения, может быть установлено заранее на основе фактического/воспринимаемого относительного соотношения Xr водителей, которые медленно выполняют операцию торможения. Затем, пороговое значение X0 устанавливается в одно из значений X0f, X0m и X0s согласно каждому водителю.
Кроме того, в случае, когда пороговое значение X0 изменяется на основе окружения, в котором основное транспортное средство CA движется, изменение выполняется на основе уровня напряжения, которое водитель ощущает согласно окружающей обстановке движения основного транспортного средства CA. Пороговое значение X0 воспринимаемого относительного соотношения X более вероятно будет превышено в случае, когда водитель ощущает большое напряжение, чем в случае, когда водитель ощущает небольшое напряжение. Следовательно, в случае управления торможением пороговое значение X0 делается большим. Окружающая обстановка движения основного транспортного средства CA включает в себя вид дороги, по которой основное транспортное средство CA движется, ситуацию, касающуюся загруженности дороги, ситуацию, касающуюся поверхности дороги, погоды, видимости и т.д. Например, пороговое значение X0 устанавливается большим, если дорога, по которой основное транспортное средство CA движется, является дорогой местного значения, загруженной дорогой или скользкой дорогой или при плохой погоде или имеет плохую видимость. Т.е., пороговое значение X0 может изменяться на основе окружающей обстановки движения основного транспортного средства CA, уровня напряжения водителя. Следовательно, возможно делать так, чтобы управление транспортным средством следовало изменениям в восприятии водителем окружающей обстановки движения основного транспортного средства CA и предотвращало или уменьшало дискомфорт, возникающий у водителя.
Устройство 5 торможения фактически выполняет управление транспортным средством. В этом варианте осуществления устройство 5 торможения выполняет управление торможением основного транспортного средства CA. Устройство 5 торможения в этом варианте осуществления является тормозным механизмом, который применяет к основному транспортному средству CA силу торможения, которая формируется приведением в действие водителем педали тормоза. После того как определяется частью 44 определения момента управления, что воспринимаемое относительное соотношение X меньше или равно пороговому значению X0, устройство 5 торможения начинает управление торможением на основе величины управляющего воздействия, например, торможения, силы торможения и т.д. Следовательно, устройство 5 торможения затормаживает основное транспортное средство CA на основе величины управляющего воздействия. Как описано выше, момент управления определяется на основе воспринимаемого относительного соотношения X (или управляющего значения, которое отражает воспринимаемое относительное соотношение X), и управление торможением начинается в определенный таким образом момент управления. Следовательно, устройство 1 управления транспортным средством выполняет управление транспортным средством на основе управляющих значений, которые отражают воспринимаемое относительное расстояние Ds и воспринимаемую относительную скорость Vs, каждое из которых является воспринимаемой относительной физической величиной. Следовательно, поскольку устройство 1 управления транспортным средством выполняет управление транспортным средством на основе управляющего значения, которое отражает воспринимаемое относительное расстояние Ds, управление транспортным средством выполняется на основе значения, которое меньше, чем фактическое относительное расстояние Dr, на сумму разницы, которая тем больше, чем длиннее фактическое относительное расстояние Dr. В частности, величины управляющего воздействия получаются посредством ЭБУ 4 на основе рабочего состояния основного транспортного средства CA (фактического относительного расстояния Dr, фактической относительной скорости Vr, скорости Vm основного транспортного средства CA и т.д.). Способы получения величин управляющего воздействия известны широкой публике, и их описание будет опущено. Кроме того, устройство 5 торможения не ограничивается тормозным механизмом, но может быть любым устройством, пока устройство затормаживает основное транспортное средство CA, уменьшая движущую силу, которая возникает в основном транспортном средстве CA, например, создавая тормозную силу или т.п. Примеры устройства торможения включают в себя двигатель, установленный в основном транспортном средстве CA (двигатель может затормаживать основное транспортное средство CA, уменьшая свою выходную мощность посредством управления выходной мощностью), трансмиссию, расположенную на пути передачи мощности основного транспортного средства CA (трансмиссия может затормаживать основное транспортное средство CA, поскольку она может передавать выходную мощность двигателя ведущим колесам после изменения мощности посредством переключения передачи для изменения скорости и может изменять трение, которое двигатель формирует во время прекращения подачи топлива), электродвигатель, который устанавливается в качестве источника мощности в основное транспортное средство CA (электродвигатель может затормаживать основное транспортное средство CA, выполняя рекуперативное торможение посредством управления приведением в действие), вспомогательное оборудование или т.п., которое приводится в действие посредством выходной мощности двигателя (вспомогательное оборудование или т.п. может затормаживать основное транспортное средство CA, увеличивая нагрузку, предоставляемую двигателю, посредством управления приведением в действие) и т.д. Кроме того, тормозной механизм и вышеупомянутые устройства (такие как двигатель, электродвигатель, вспомогательные устройства и т.д.) могут быть объединены, чтобы формировать устройство 5 торможения.
Далее, будет описан способ управления транспортным средством, применяемый устройством 1 управления транспортным средством. Фиг. 10 - это блок-схема последовательности операций управления, показывающая способ управления транспортным средством устройства управления транспортным средством в соответствии с вариантом осуществления. В частности, способ управления транспортным средством устройства 1 управления транспортным средством реализуется, например, посредством ЭБУ 4, выполняющего программы управления транспортным средством, которые сохранены заранее. Кроме того, программа управления транспортным средством выполняется в предварительно определенном периоде управления. Следовательно, способ управления транспортным средством устройства 1 управления транспортным средством многократно выполняется, пока основное транспортное средство CA движется.
Сначала ЭБУ 4 устройства 1 управления транспортным средством, как показано на фиг. 10, получает скорость Vm основного транспортного средства CA, фактическое относительное расстояние Dr, фактическую относительную скорость Vr и ускорение Ap объекта TA восприятия, как описано выше (этап ST1).
Далее, часть 41 вычисления воспринимаемого относительного расстояния вычисляет воспринимаемое относительное расстояние Ds, а часть 42 вычисления воспринимаемой относительной скорости вычисляет воспринимаемую относительную скорость Vs (этап ST2). В этом варианте осуществления часть 41 вычисления воспринимаемого относительного расстояния вычисляет воспринимаемое относительное расстояние Ds, например, из полученного фактического относительного расстояния Dr с помощью вышеупомянутой формулы (3). Кроме того, часть 42 вычисления воспринимаемой относительной скорости вычисляет воспринимаемую относительную скорость Vs, например, из полученной фактической относительной скорости Vr, полученной скорости Vm основного транспортного средства CA и ускорения Ap объекта TA восприятия с помощью вышеупомянутой формулы (7).
Далее, часть 43 вычисления воспринимаемого относительного соотношения вычисляет воспринимаемое относительное соотношение X (этап ST3). В этом варианте осуществления часть 43 вычисления воспринимаемого относительного соотношения выполняет вычисление как (воспринимаемое относительное расстояние Ds)/(воспринимаемая относительная скорость Vs)=(воспринимаемое относительное соотношение X).
Далее, часть 44 определения момента управления определяет, больше ли или нет воспринимаемое относительное соотношение X, чем пороговое значение X0 (этап ST4). В этом варианте осуществления часть 44 определения момента управления определяет, действительно ли воспринимаемое относительное соотношение X меньше или равно пороговому значению X0, с тем, чтобы определять, может ли управление торможением начинаться, на основе воспринимаемого относительного соотношения X.
Далее, ЭБУ 4, если определяется, что воспринимаемое относительное соотношение X больше, чем пороговое значение X0, посредством части 44 определения момента управления (положительное определение на этапе ST4), начинает управление торможением (этап ST5). В этом варианте осуществления, если условие для начала управления торможением на основе воспринимаемого относительного соотношения X удовлетворяется, ЭБУ 4 выполняет управление торможением на основе величин управляющего воздействия, которые получаются посредством ЭБУ 4. Следовательно, устройство 1 управления транспортным средством выполняет управление транспортным средством на основе значения, которое меньше, чем фактическое относительное расстояние Dr, на величину, которая тем больше, чем длиннее фактическое относительное расстояние Dr. Например, если основное транспортное средство CA выполняет управление предотвращением/смягчением столкновения, управление предотвращением/смягчением столкновения более вероятно должно начинаться, когда фактическое относительное расстояние Dr является длинным, чем, когда фактическое относительное расстояние Dr короткое. В частности, если определяется частью 44 определения момента управления, что воспринимаемое относительное соотношение X не больше, чем пороговое значение X0 (отрицательное определение на этапе ST4), ЭБУ 4 заканчивает текущий период управления и переходит к следующему выполнению управления торможением.
Таким образом, в устройстве 1 управления транспортным средством и способе управления транспортным средством, выполняемым устройством 1 управления транспортным средством в соответствии с вариантом осуществления, управление торможением из управления транспортным средством начинается на основе управляющего значения, которое отражает воспринимаемую относительную физическую величину, которая соответствует фактической относительной физической величине, т.е., воспринимаемому относительному соотношению X, основанному как на воспринимаемом относительном расстоянии Ds, полученном на основе фактического относительного расстояния Dr, так и воспринимаемой относительной скорости Vs, полученной на основе фактической относительной скорости Vr (управляющее значение, которое отражает воспринимаемое относительное соотношение X). Следовательно, получается момент управления торможением, который согласуется с восприятием водителя, так что управление торможением, которое согласуется с восприятием водителя, выполняется. Следовательно, дискомфорт, возникающий у водителя при управлении торможением, может быть ограничен. Следует отметить здесь, что, если воспринимаемая относительная скорость Vs является высокой, водитель управляет транспортным средством на основе воспринимаемой относительной скорости Vs, и что, если воспринимаемая относительная скорость Vs становится небольшой, водитель управляет транспортным средством на основе воспринимаемого относительного расстояния Ds. Следовательно, поскольку управление транспортным средством выполняется на основе воспринимаемого относительного соотношения X, т.е., соотношения между воспринимаемым относительным расстоянием Ds и воспринимаемой относительной скоростью Vs, управление транспортным средством может задаваться таким, чтобы согласовываться с ощущением водителя при управлении работой транспортного средства.
В частности, управление транспортным средством не ограничивается управлением торможением как в вышеупомянутом варианте осуществления, и оно может быть любым управлением транспортным средством, пока управление транспортным средством выполняется на основе относительной физической величины (относительного расстояния, относительной скорости). Например, управление транспортным средством может быть управлением ускорением для ускорения основного транспортного средства CA (включающим в себя управление, при котором транспортное средство ускоряется из состояния, в котором педаль акселератора не задействована водителем, и управление, при котором транспортное средство дополнительно ускоряется из состояния, в котором педаль акселератора задействована водителем) или может быть также управлением разворотом или поворотом для поворота основного транспортного средства CA (включающим в себя управление, при котором транспортное средство поворачивает из состояния, в котором рулевое колесо не задействовано водителем, и управление, при котором транспортное средство дополнительно поворачивает из состояния, в котором рулевое колесо задействовано водителем). Управление ускорением и управление поворотом выполняются, например, как часть вышеупомянутого следящего управления, часть управления поворотом для удерживания транспортного средства на полосе дороги, по которой основное транспортное средство CA в настоящий момент движется, или часть вышеупомянутого управления предотвращением/смягчением столкновения.
Кроме того, управление транспортным средством не ограничивается управлением для изменения состояния движения основного транспортного средства CA, как описано выше, а может также быть управлением предупреждением для создания предупреждения водителю или внешнему устройству или т.п., которое предусмотрено за пределами основного транспортного средства CA. Например, управление для формирования предупреждения может начинаться, когда определяется, что воспринимаемое относительное соотношение X превышает пороговое значение X0.
Кроме того, управление транспортным средством может также выполняться как часть управления предотвращением/смягчением столкновения. Например, если определяется, что воспринимаемое относительное соотношение X превышает пороговое значение X0, также допустимо начинать управление для избегания столкновения основного транспортного средства CA (например, управления для формирования аварийной сигнализации, управления для возвращения педали акселератора, которая задействована водителем, управление для увеличения силы реакции педали акселератора и т.д.). Кроме того, если определяется, что воспринимаемое относительное соотношение X превышает пороговое значение X0, также допустимо начинать управление для уменьшения удара во время столкновения основного транспортного средства CA (например, управление для натяжения ремня безопасности для того, чтобы закреплять ремень безопасности близко к водителю или пассажиру, управление для увеличения тормозной силы, которую формирует устройство 5 торможения, управление для увеличения заранее тормозного давления для формирования тормозной силы для того, чтобы устройство 5 торможения быстро формировало тормозную силу).
Кроме того, способ получения фактического относительного расстояния Dr и фактической относительной скорости Vr, выполняемый посредством ЭБУ 4, не ограничивается описанным выше в связи с вариантом осуществления. Например, ЭБУ 4 основного транспортного средства CA может также получать данные об объекте восприятия, которые включают в себя позиционные данные об объекте TA восприятия, его скорости Vt транспортного средства и т.д., и может получать фактическое относительное расстояние Dr и фактическую относительную скорость Vr, вычисляя их на основе полученных данных объекта восприятия и данных основного транспортного средства, которые включают в себя позиционные данные об основном транспортном средстве CA, его скорость Vm транспортного средства и т.д. Получение данных объекта восприятия, если объект TA восприятия является инфраструктурным объектом, предпочтительно должно выполняться с помощью картографических данных, сохраненных в навигационной системе, установленной в основном транспортном средстве CA, или с помощью дорожных инфраструктур, с которыми ЭБУ 4 основного транспортного средства CA может связываться, и т.д. Кроме того, если объект TA восприятия - это движущееся впереди транспортное средство, данные объекта восприятия могут также быть получены через устройства связи между транспортными средствами объекта TA восприятия и основного транспортного средства CA или через дорожную инфраструктуру, с которой объект TA восприятия и ЭБУ 4 основного транспортного средства CA способны связываться.
Кроме того, положение объекта TA восприятия относительно основного транспортного средства CA не ограничивается областью перед основным транспортным средством CA, как в вышеприведенном варианте осуществления. Т.е., положение основного транспортного средства CA относительно объекта TA восприятия может быть любым положением, пока его положение находится за пределами основного транспортного средства CA и воспринимается водителем. Например, в случае, когда объект TA восприятия располагается сбоку от основного транспортного средства CA, водитель может непосредственно воспринимать объект TA восприятия, так что способ управления транспортным средством этого изобретения применим. Кроме того, в случае, когда объект TA восприятия располагается сзади от основного транспортного средства CA, водитель может воспринимать объект TA восприятия непосредственно или через боковое зеркало или зеркало заднего вида, так что способ управления транспортным средством изобретения применим. Следовательно, например, в случае, когда объект TA восприятия является транспортным средством, которое движется сзади основного транспортного средства CA и по полосе дороги, следующей по отношению к полосе, по которой движется основное транспортное средство CA, управление транспортным средством может выполняться на основе воспринимаемой относительной физической величины, когда водитель изменяет полосу движения основного транспортного средства CA на следующую полосу, т.е., в случае изменения полосы дороги или слияния полос дороги. Управление транспортным средством здесь включает в себя управление торможением, управление ускорением, управление поворотом, управление предупреждением и т.д.
Кроме того, воспринимаемое относительное соотношение X не ограничивается соотношением между воспринимаемым относительным расстоянием Ds и воспринимаемой относительной скоростью Vs как в вышеприведенном варианте осуществления, а может быть любым соотношением, пока, по меньшей мере, один из знаменателя и числителя соотношения включает в себя воспринимаемую относительную физическую величину. Например, воспринимаемое относительное соотношение X может также быть соотношением между воспринимаемым относительным расстоянием Ds и фактической относительной скоростью Vr или соотношением между фактическим относительным расстоянием Dr и воспринимаемой относительной скоростью Vs. Кроме того, хотя воспринимаемое относительное соотношение X выражается выше как дробь, используя воспринимаемое относительное расстояние Ds в качестве числителя и воспринимаемую относительную скорость Vs в качестве знаменателя, воспринимаемая относительная скорость Vs может вместо этого быть использована как числитель, а воспринимаемое относительное расстояние Ds может быть использовано как знаменатель. Кроме того, управление транспортным средством необязательно выполняется на основе воспринимаемого относительного соотношения X как в вышеупомянутом варианте осуществления, а может также выполняться на основе воспринимаемого относительного расстояния Ds и фактической относительной скорости Vr или одного из воспринимаемой относительной скорости Vs и фактического относительного расстояния Dr. Кроме того, управляющее значение, которое отражает воспринимаемую относительную физическую величину, не ограничивается значением, относящимся к моменту управления как в вышеупомянутом варианте осуществления, а может также быть управляющим значением, относящимся к величине управляющего воздействия при управлении транспортным средством. Например, в случае, когда величина управляющего воздействия при управлении транспортным средством получается на основе, по меньшей мере, одного из относительного соотношения, относительного расстояния и относительной скорости, также допустимо получать величину управляющего воздействия в качестве управляющего значения, связанного с величиной управляющего воздействия, на основе воспринимаемого относительного соотношения X, воспринимаемого относительного расстояния Ds и воспринимаемой относительной скорости Vs.
Кроме того, в случае, когда пороговое значение X0 устанавливается отдельно для каждого водителя основного транспортного средства, может быть определено, что внимание водителя снизилось, если установленное пороговое значение X0 водителя превышается фактическим/воспринимаемым относительным соотношением Xr, которое вычисляется на основе фактического относительного расстояния Dr и фактической относительной скорости Vr, возникающих, когда водитель, соответствующий установленному пороговому значению X0, задействует педаль тормоза основного транспортного средства CA. Т.е., состояние водителя может оцениваться на основе фактического/воспринимаемого относительного соотношения Xr и порогового значения X0. Следовательно, например, в случае, когда фактическое/воспринимаемое относительное соотношение Xr превышает пороговое значение X0, также допустимо выполнять управление предупреждением, управление для предотвращения столкновения основного транспортного средства CA, управление для смягчения удара при столкновении основного транспортного средства CA.
В частности, воспринимаемое относительное расстояние Ds, воспринимаемая относительная скорость Vs и воспринимаемое относительное соотношение X могут также быть получены посредством ЭБУ 4 на основе базы данных, которая создается нахождением связей каждого из этих значений с параметрами для вычисления этих значений (параметрами, которые включают в себя фактическое относительное расстояние Dr, фактическую относительную скорость Vr, скорость Vm транспортного средства и т.д.) заранее посредством экспериментов или т.п. Кроме того, управляющее значение, которое отражает воспринимаемую относительную физическую величину (воспринимаемое относительное соотношение X), такое как управляющее значение, относящееся к моменту управления, управляющее значение, относящееся к величине управляющего воздействия, и т.д., может также быть получено посредством ЭБУ 4 на основе базы данных, которая создается посредством нахождения взаимосвязей каждого из этих управляющих значений с параметрами для вычисления этих значений (параметрами, которые включают в себя фактическое относительное расстояние Dr, фактическую относительную скорость Vr, скорость Vm транспортного средства и т.д.) заранее посредством экспериментов или т.п. на основе воспринимаемых относительных физических величин (воспринимаемого относительного расстояния Ds и воспринимаемой относительной скорости Vs) и воспринимаемого относительного соотношения X.
Как может быть понятно из предшествующего описания, устройство управления транспортным средством и способ управления транспортным средством, описанные выше, полезны для устройства управления транспортным средством и способа управления транспортным средством, которые выполняют управление транспортным средством для управления транспортным средством, используя в качестве входного значения относительную физическую величину, которая показывает относительную взаимосвязь между транспортным средством и объектом восприятия, который находится за пределами транспортного средства и который воспринимается водителем транспортного средства, и особенно подходят, чтобы ограничивать дискомфорт, возникающий у водителя при управлении транспортным средством.
В то время как изобретение было описано со ссылкой на примерные варианты его осуществления, следует понимать, что изобретение не ограничивается примерными вариантами осуществления или конструкциями. Напротив, изобретение предназначено, чтобы охватывать различные модификации и эквивалентные размещения. Кроме того, в то время как различные элементы примерных вариантов осуществления показаны в различных комбинациях и конфигурациях, которые являются примерными, другие комбинации и конфигурации, включающие в себя большее, меньшее количество элементов или только один элемент, также соответствуют идее и объему изобретения.
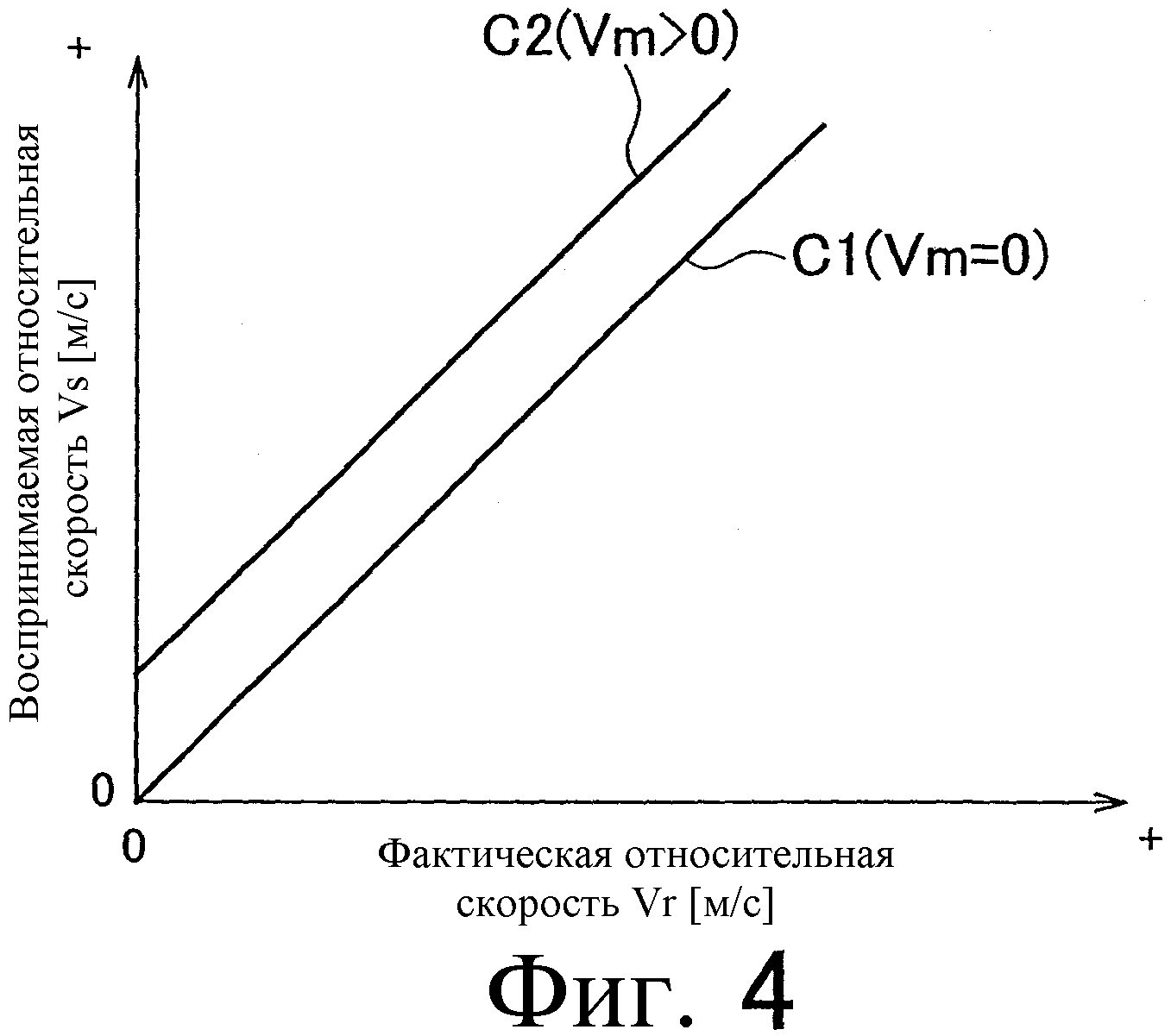

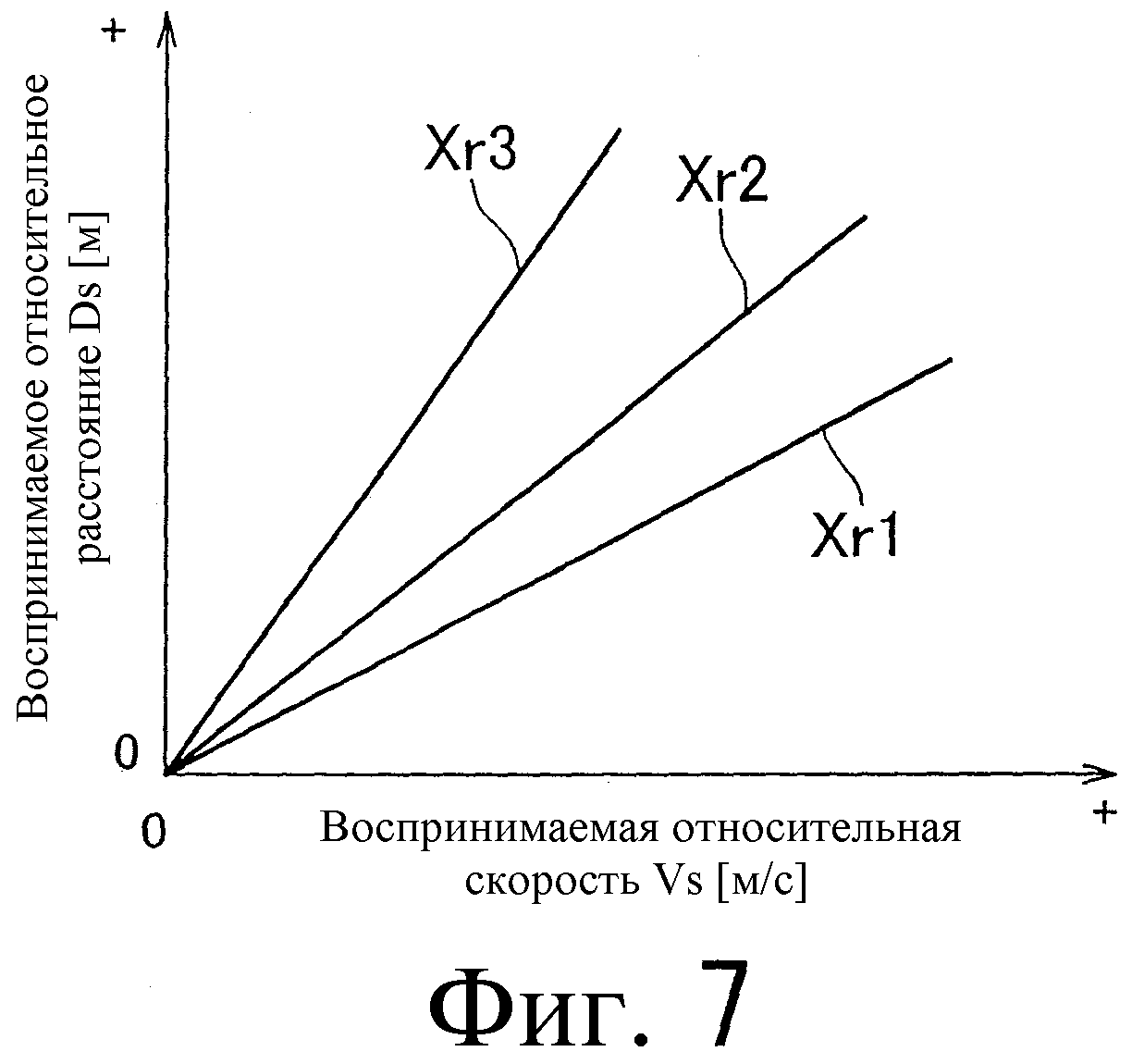
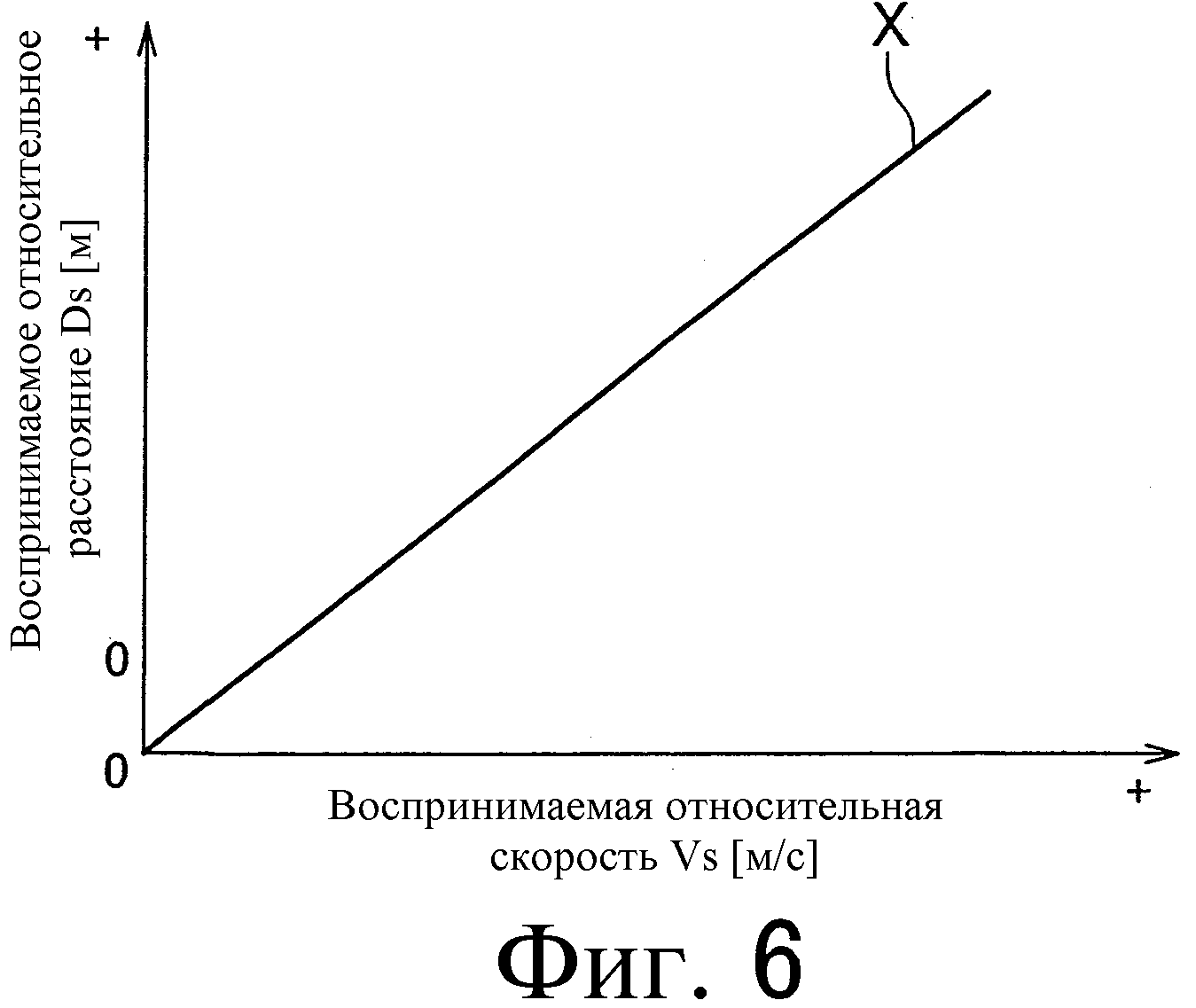
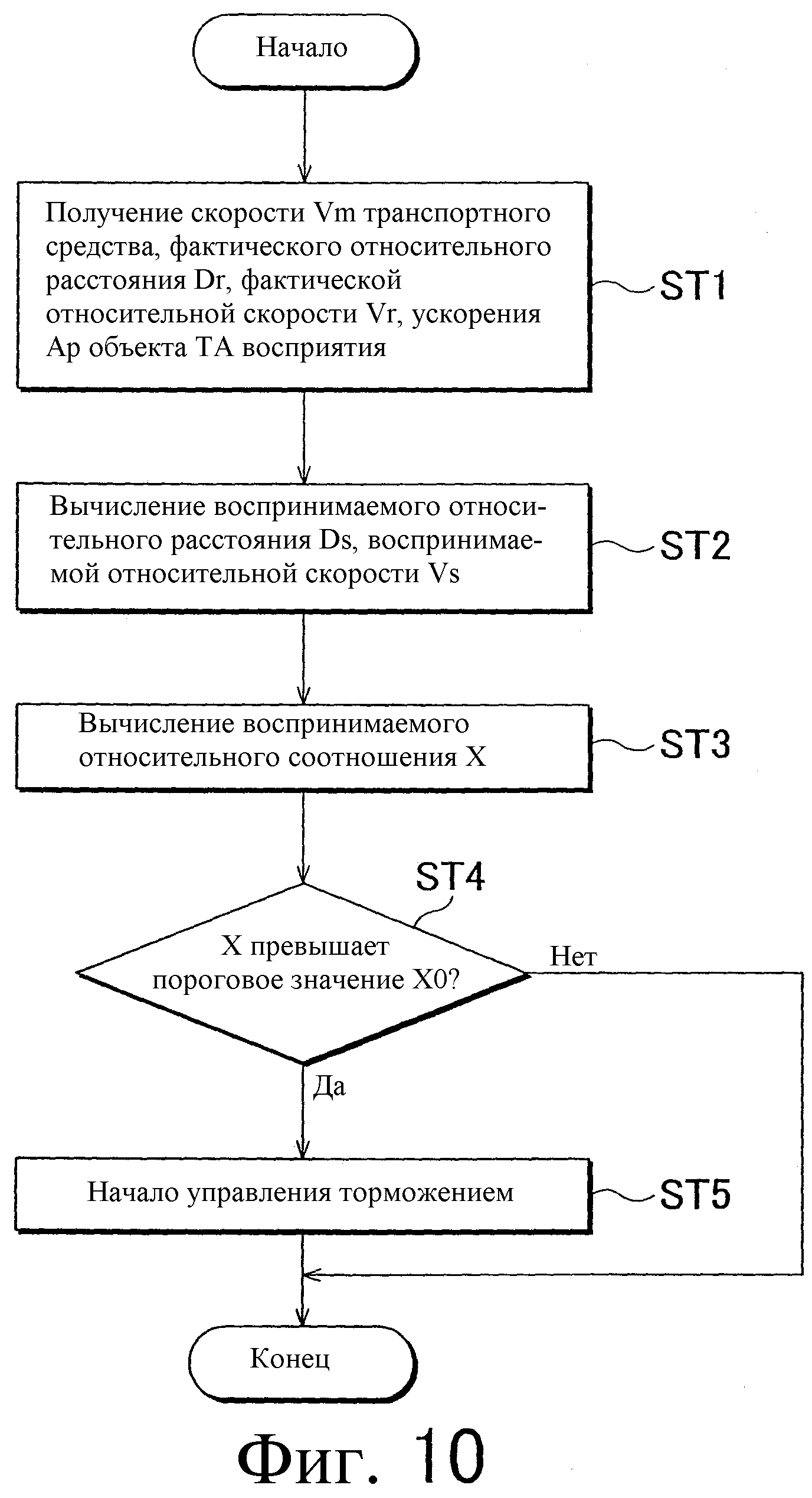
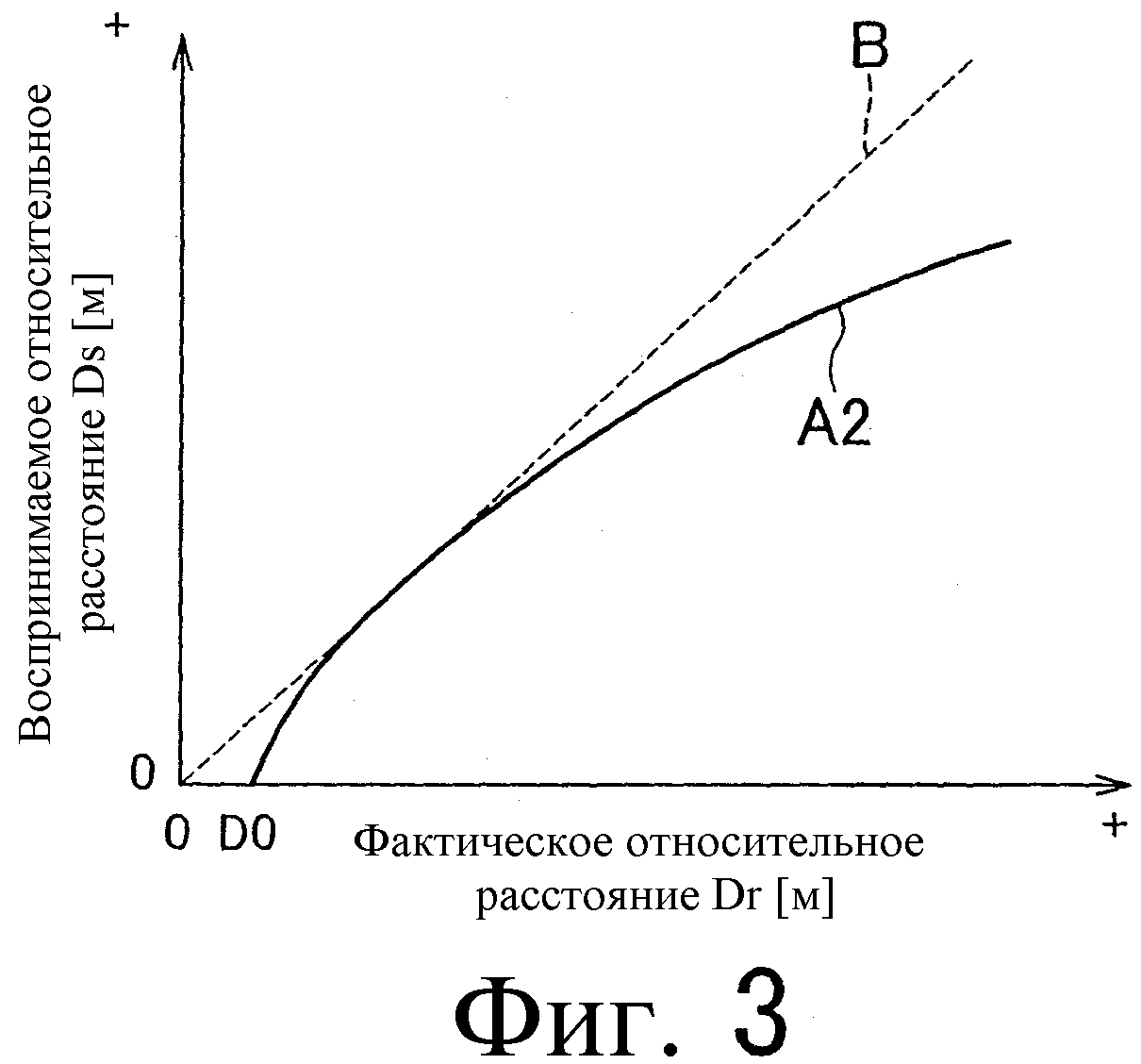
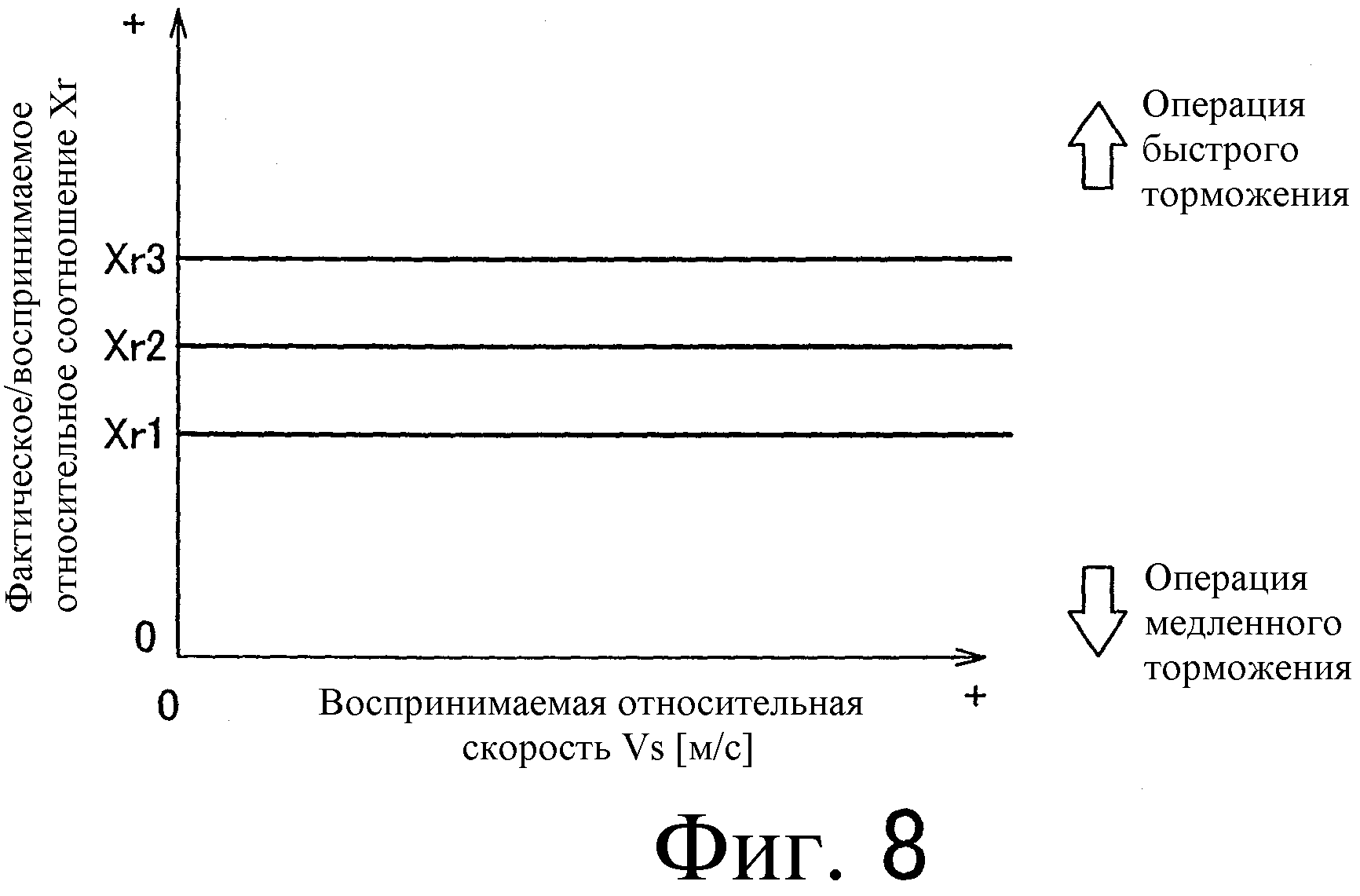
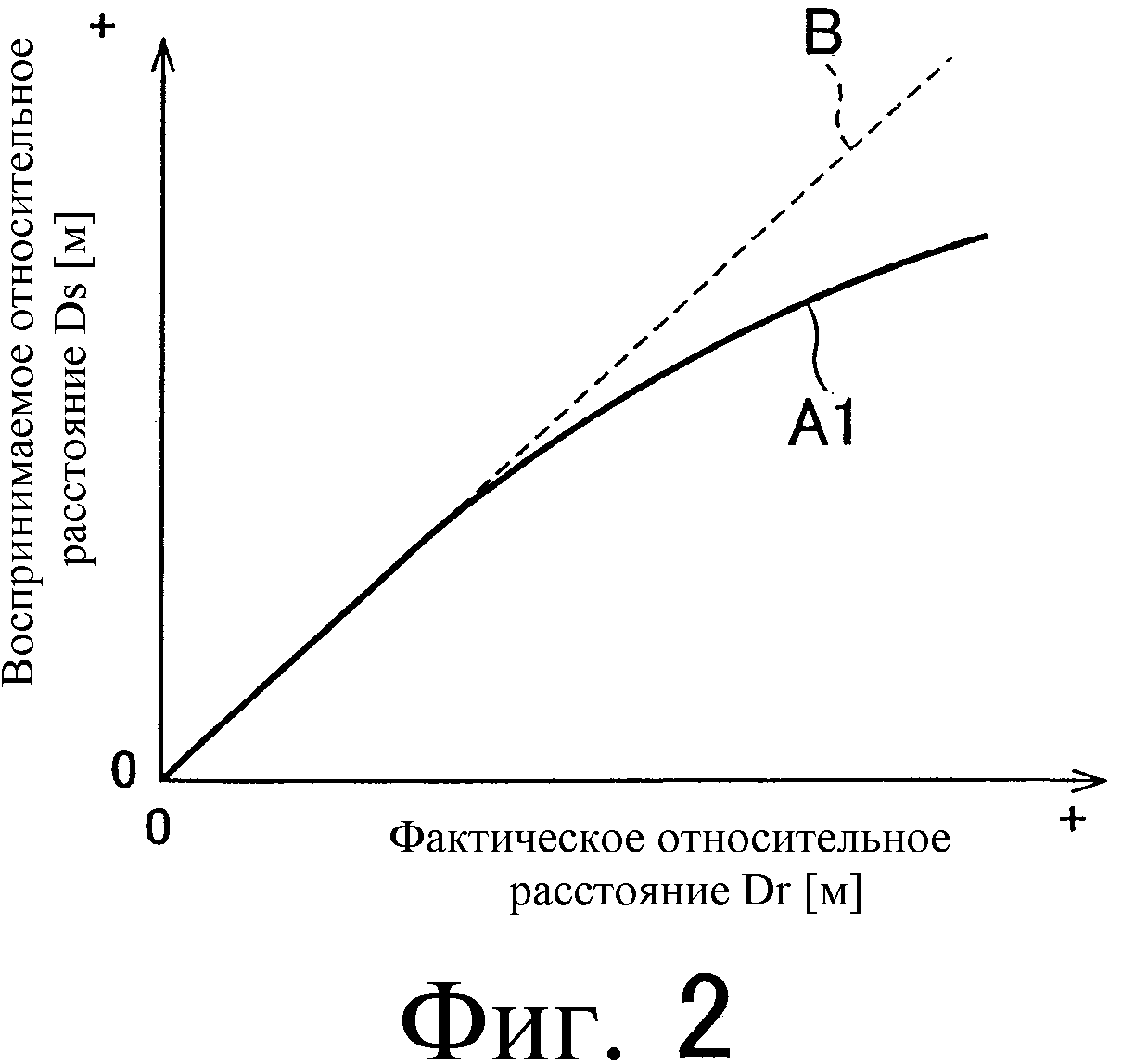
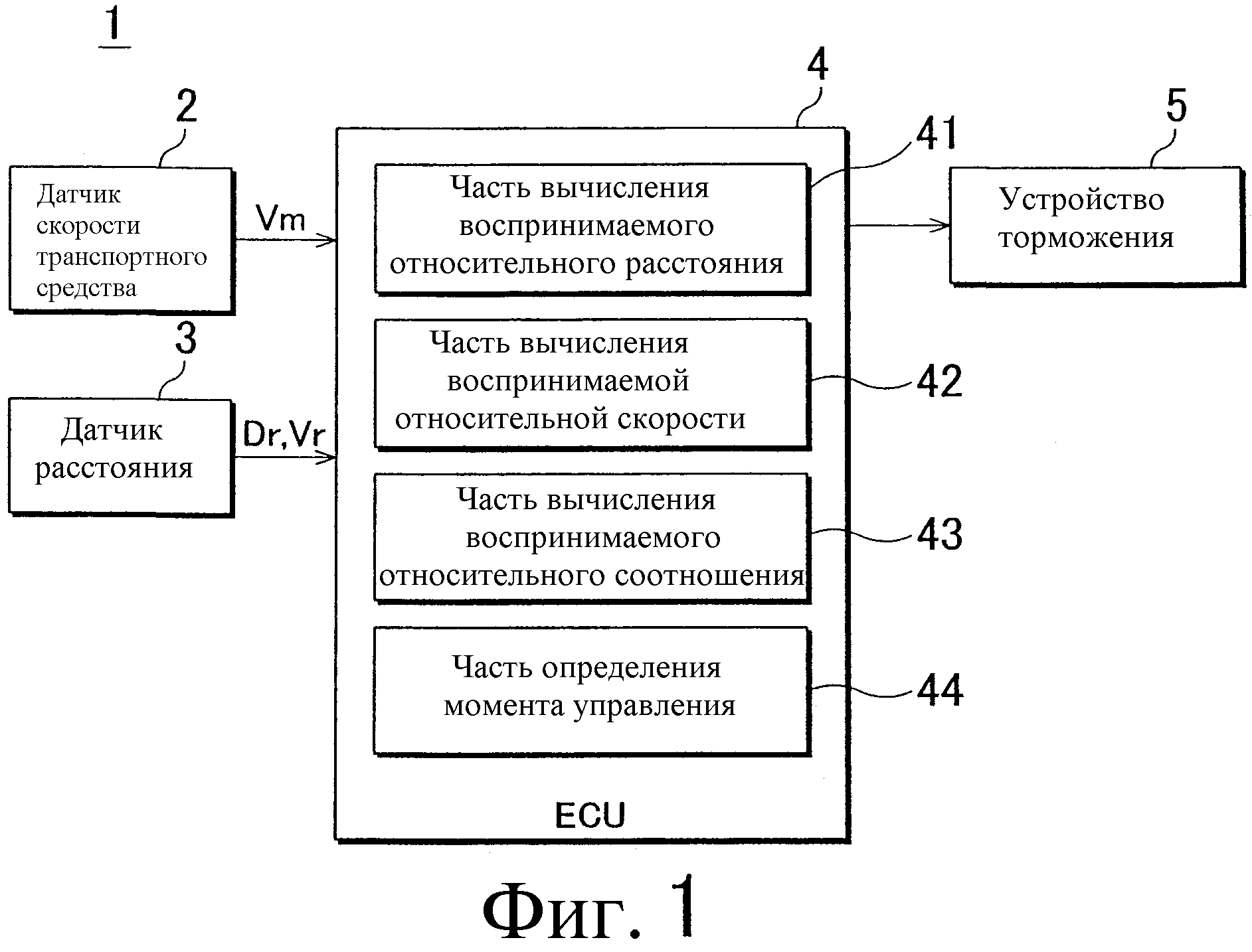
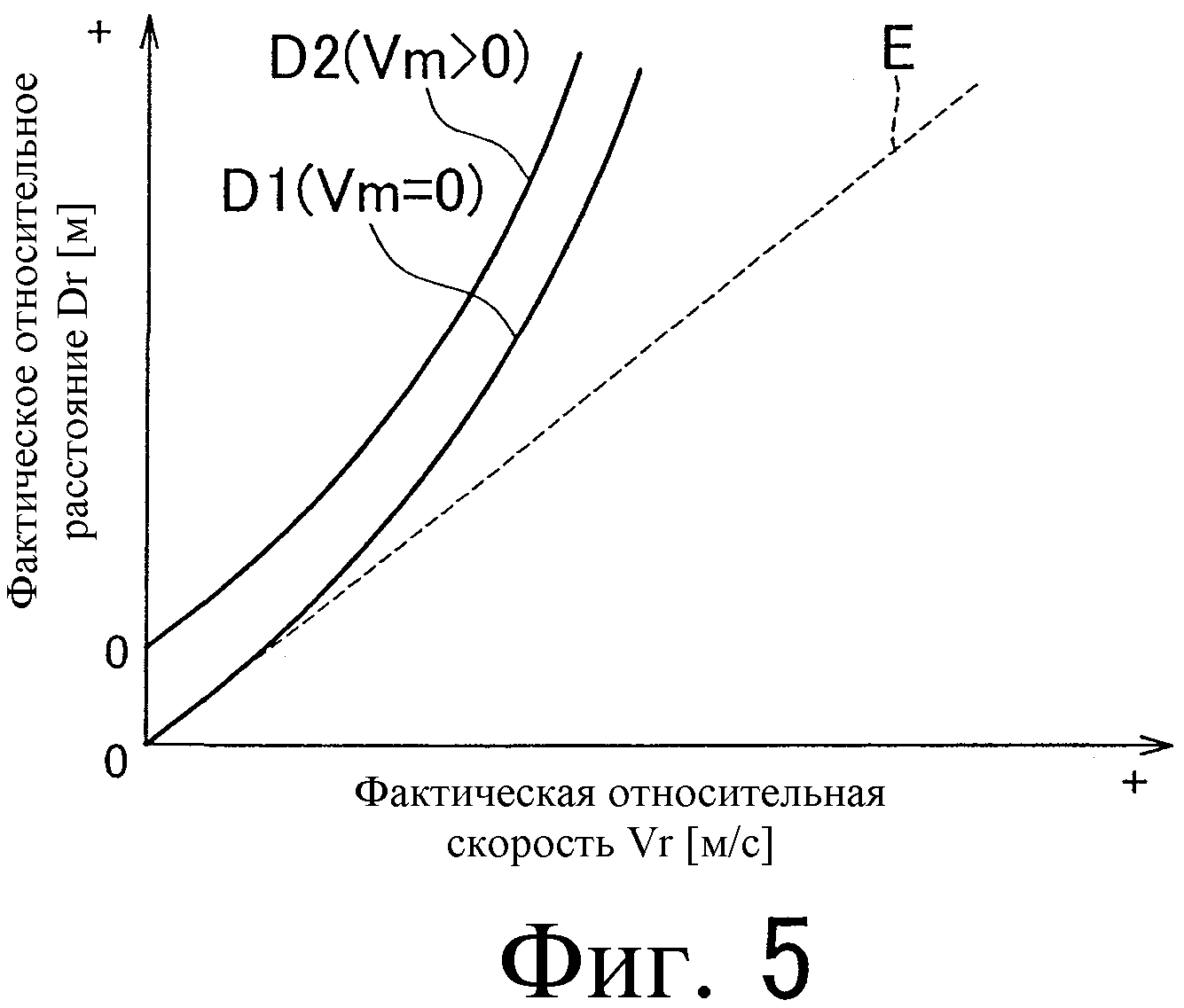
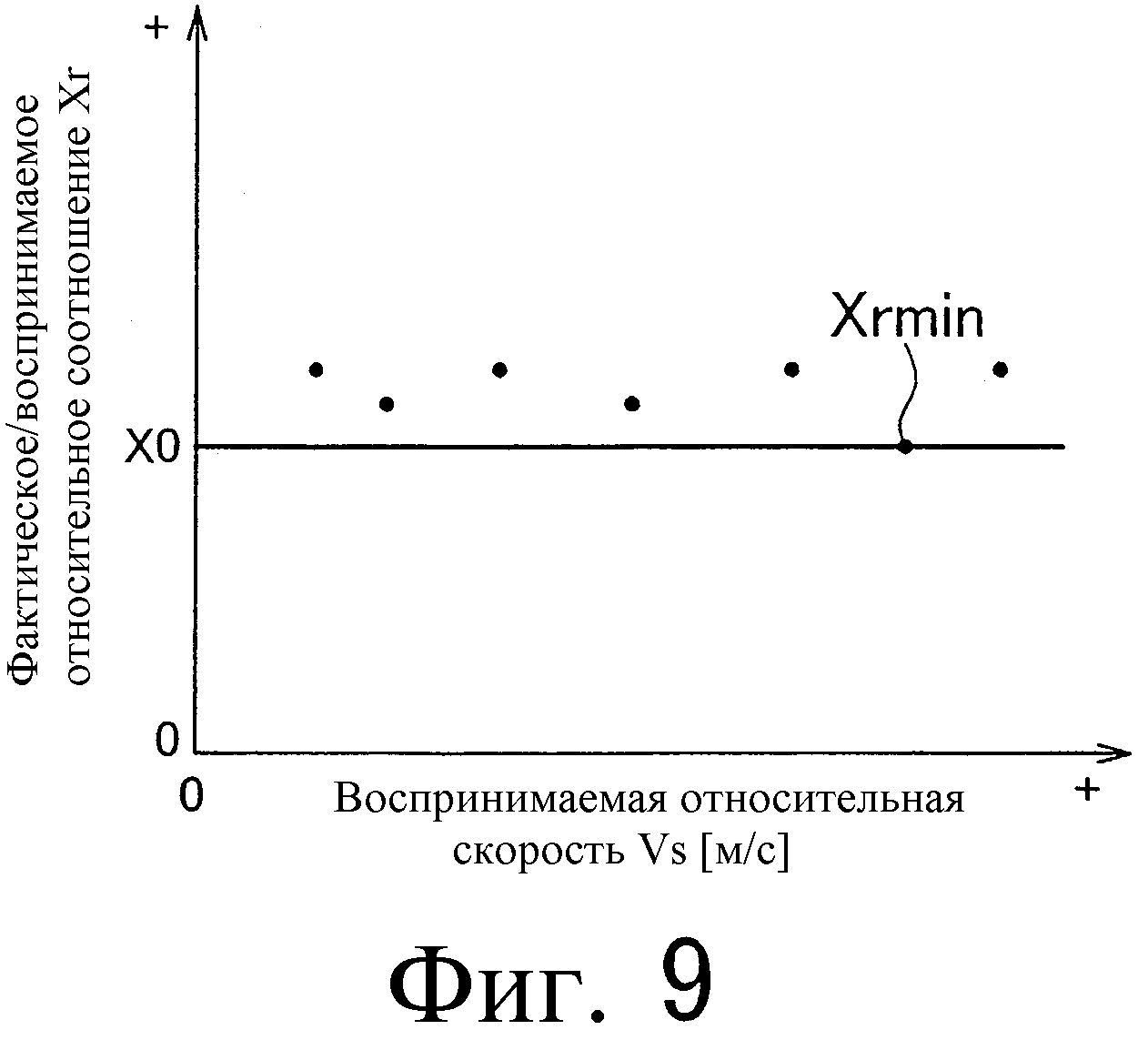
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

