Результат интеллектуальной деятельности: ТЕХНОЛОГИЧЕСКАЯ МАШИНА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к технологической машине, охарактеризованной в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Известна панельная пила, содержащая рабочий стол, опорный узел для установки пильного диска с возможностью вращения и опускной рычаг, приводимый в движение оператором для перемещения опорного узла относительно рабочего стола.
Раскрытие изобретения
Объектом настоящего изобретения является технологическая машина, прежде всего пильный станок, имеющая рабочую поверхность для расположения обрабатываемой заготовки и узел крепления рабочего инструмента, установленный подвижно относительно рабочей поверхности.
Предлагается оснастить технологическую машину блоком распознавания, предусмотренным для распознавания присутствия в зоне рабочего инструмента материала определенного вида, осуществляемого посредством анализа спектра излучения. Этим достигается надежное и быстрое распознавание рабочей ситуации у технологической машины, в особенности при перемещении узла крепления рабочего инструмента относительно рабочей поверхности. В этой связи под "зоной рабочего инструмента" следует понимать, в частности, область, состоящую из точек, наименьшее расстояние от которых до рабочего инструмента технологической машины и/или до зоны пути перемещения рабочего инструмента технологической машины составляет не более 10 см, желательно не более 5 см и предпочтительно не более 2 см. При этом область, называемая "зоной пути перемещения рабочего инструмента", состоит, в частности, из точек, в которых потенциально может оказаться рабочий инструмент технологической машины, в частности ввиду подвижности установки узла крепления рабочего инструмента относительно рабочей поверхности технологической машины. Блок регистрации изображений обладает полем зрения, которое во время работы технологической машины задает контролируемую зону технологической машины. Предпочтительно, чтобы эта контролируемая зона включала в себя по меньшей мере один отдельный участок зоны рабочего инструмента. Также предпочтительно, чтобы вертикальная (т.е. наблюдаемая при взгляде в вертикальном направлении) проекция контролируемой зоны на рабочую поверхность включала в себя (охватывала) вертикальную проекцию зоны рабочего инструмента на рабочую поверхность технологической машины. Кроме того, контролируемая зона может включать в себя по меньшей мере один отдельный участок зоны пути перемещения рабочего инструмента.
Кроме того, блок распознавания предлагается предусмотреть, в частности, для обнаружения присутствия в зоне рабочего инструмента части человеческого тела. Это может осуществляться путем распознавания человеческой ткани и/или материала предмета одежды, носимой оператором. Под "излучением" следует понимать, в частности, электромагнитное излучение. Под "спектром" излучения следует понимать, в частности, распределение параметра излучения, в частности интенсивности излучения, в зависимости от длины волны, частоты и/или времени. Кроме того, под "спектральным анализом" излучения следует понимать, в частности, анализ сигналов, при которой результат анализа получают путем регистрации некоторой характеристики спектра излучения, например интенсивность, проинтегрированной по длине волны. Кроме того, блок распознавания может включать в себя по меньшей мере один чувствительный элемент, а технологическая машина может содержать средство сообщения движения, которое при перемещении узла крепления рабочего инструмента относительно рабочей поверхности обеспечивает совместное с ним перемещение чувствительного элемента. Это позволяет достичь высокого уровня безопасности работы при перемещении узла крепления рабочего инструмента.
В предпочтительном варианте осуществления изобретения узел крепления рабочего инструмента предусмотрен ("предусмотрен" в контексте изобретения следует понимать в смысле "выполнен и/или расположен") для установки рабочего инструмента с возможностью вращения в плоскости вращения, а блок распознавания включает в себя чувствительный элемент, расположенный сбоку от плоскости вращения. Под расположением "сбоку" от плоскости вращения следует понимать, в частности, расположение в полупространстве, ограниченном плоскостью вращения. В частности, это следует понимать как заключение чувствительного элемента полностью в этом полупространстве. Под "плоскостью вращения" следует понимать, в частности, плоскость, в которой находится центр тяжести рабочего инструмента и которая проходит перпендикулярно оси вращения рабочего инструмента. Особенно выгодным является расположение чувствительного элемента сбоку от рабочего инструмента. При этом проекция чувствительного элемента на рабочий инструмент в направлении, перпендикулярном плоскости вращения, заключена в границах поверхности рабочего инструмента.
В целесообразном усовершенствованном варианте осуществления изобретения предлагается снабдить технологическую машину предохранительным средством, предусмотренным для того, чтобы на основании сигнала блока распознавания блокировать перемещение узла крепления рабочего инструмента относительно рабочей поверхности, что позволяет эффективно избегать контакта установленного в технологической машине рабочего инструмента с находящимся в зоне пути перемещения рабочего инструмента посторонним объектом или частью человеческого тела.
Блок распознавания целесообразно предусмотреть для распознавания присутствия материала определенного вида посредством анализа спектра излучения, отраженного от исследуемого объекта, чем достигается эффективное, основанное на регистрации контраста распознавание материала определенного вида.
В предпочтительном варианте осуществления изобретения блок распознавания может включать в себя сенсорный блок по меньшей мере с одним диапазоном чувствительности для регистрации излучения в диапазоне длин волн, расположенном, по меньшей мере частично, в инфракрасной области спектра, благодаря чему надежное и быстрое распознавание достигается при особенно малых затратах.
В качестве альтернативы или в дополнение блок распознавания может включать в себя сигнальное устройство, предусмотренное для работы по сверхширокополосной технологии. Под сигнальным устройством, предусмотренным для работы по сверхширокополосной технологии, следует понимать, в частности, функциональный узел, позволяющий генерировать, принимать и/или анализировать (обрабатывать) сверхширокополосный сигнал. Под "сверхширокополосным сигналом" следует понимать, в частности, сигнал, обладающий определенным спектром частот с центральной частотой и шириной полосы частот, составляющей по меньшей мере 500 МГц. Центральную частоту предпочтительно выбирать в диапазоне частот от 1 до 15 ГГц.
Особенно надежное распознавание достигается, если диапазон длин волн является диапазоном в ближней и средней области инфракрасного излучения. Это позволяет обеспечить диапазон чувствительности, целенаправленно согласованный с регистрацией и анализом спектра отражения. В этой связи под "ближней и средней областью инфракрасного излучения" следует понимать, в частности, интервал длин волн инфракрасной области спектра, расположенный ниже длины волны 15 мкм. Кроме того, высокий контраст между тканью человеческого тела и заготовкой достигается, если диапазон чувствительности для регистрации излучения предусмотрен в интервале длин волн инфракрасной области спектра, расположенном ниже длины волны 8 мкм. В частности, целесообразно, чтобы диапазон длин волн представлял собой ближнюю инфракрасную область спектра. В этой связи под "ближней инфракрасной областью спектра" следует понимать, в частности, интервал длин волн инфракрасной области спектра, расположенный ниже длины волны 1,5 мкм, например интервал в ближней области инфракрасного излучения (IR-A). Диапазон длин волн также может быть частично расположен в видимой области электромагнитного спектра.
Характеризующий результат анализа сигнал с высокой интенсивностью можно получить, если блок распознавания содержит передающее устройство, предусмотренное для передачи излучения, по меньшей мере одна составляющая которого находится в указанном диапазоне длин волн.
Кроме того, передающее устройство может быть предусмотрено для передачи излучения в указанном диапазоне длин волн и по меньшей мере в одном дополнительном диапазоне длин волн, что позволяет повысить точность процесса распознавания. При этом для различения составляющих излучения в различных диапазонах длин волн каждую из этих составляющих можно посылать в форме импульса, ставя в соответствие определенному диапазону длин волн определенную длительность импульса. Например, такие импульсы можно посылать одновременно.
Эффективность различений составляющих излучения также достигается, если передающее устройство предусмотрено для последовательно осуществляемой передачи излучения в указанном диапазоне длин волн и по меньшей мере в одном дополнительном диапазоне длин волн. Благодаря этому можно целенаправленно генерировать излучение в требуемых диапазонах длин волн, причем при регистрации излучения сенсорным блоком можно отказаться от сложной и ресурсоемкой фильтрации. Кроме того, при этом достигается высокое отношение сигнал/шум. Под "последовательно осуществляемой" передачей в двух диапазонах длин волн следует понимать, в частности, такую передачу, при которой посылка излучаемого сигнала в первом диапазоне длин волн и посылка излучаемого сигнала во втором диапазоне длин волн происходит практически без наложения во времени. При этом длительность наложения передачи, т.е. отрезок времени, в котором излучение посылается одновременно в двух диапазонах длин волн, должна составлять менее 10%, желательно менее 5% и предпочтительно менее 1% от наименьшей длительности передачи в том или ином диапазоне длин волн. Особенно целесообразно вести передачу без наложения передаваемых сигналов, посылая посредством передающего устройства отделенные друг от друга импульсы.
Предпочтительно, чтобы сенсорный блок имел по меньшей мере один дополнительный диапазон чувствительности, предусмотренный для регистрации излучения в дополнительном диапазоне длин волн, чем достигается еще более высокая надежность распознавания вида материала. Диапазоны длин волн регистрируемого излучения могут перекрываться. Предпочтительно же, если диапазоны длин волн отделены друг от друга. Особенно точного распознавания можно достичь, если сенсорный блок имеет по меньшей мере три диапазона чувствительности, предусмотренных для регистрации излучения в различных диапазонах длин волн.
В этой связи предлагается вариант, в котором блок распознавания включает в себя средство анализа, которое предусмотрено для распознавания присутствия материала определенного вида на основании отношения по меньшей мере двух параметров излучения, относящихся к составляющим излучениям в различных диапазонах длин волн. Это позволяет достичь быстрого распознавания. В частности, можно отказаться от учета опорного излучения. Под "параметром излучения" следует понимать, в частности, параметр, регистрируемый при помощи излучения, падающего на сенсорный блок. Этот параметр может быть, в частности, электрической величиной.
В предпочтительном варианте осуществления изобретения диапазон длин волн является узкополосным. В этой связи под "узкополосным диапазоном длин волн" следует понимать, в частности, диапазон длин волн, имеющий ширину полосы не более 100 нм, желательно не более 50 нм, предпочтительно не более 20 нм и особенно предпочтительно не более 10 нм. Это позволяет отказаться от конструктивно сложной фильтрации регистрируемого излучения.
Краткое описание чертежей
Другие преимущества изобретения раскрыты в приведенном ниже описании осуществления изобретения, поясняемом чертежами. На чертежах в качестве примера представлен вариант осуществления изобретения. Чертежи, описание и формула изобретения содержат многочисленные признаки в определенной комбинации. Специалист, исходя из целесообразности, также будет рассматривать эти признаки в отдельности и объединять их в другие рациональные комбинации. На чертежах показано:
на фиг.1 - изображенная при виде сбоку панельная пила с устройством контроля обстановки вблизи работающего инструмента, встроенным в защитный колпак,
на фиг.2 - панельная пила, показанная на фиг.1, при виде сверху,
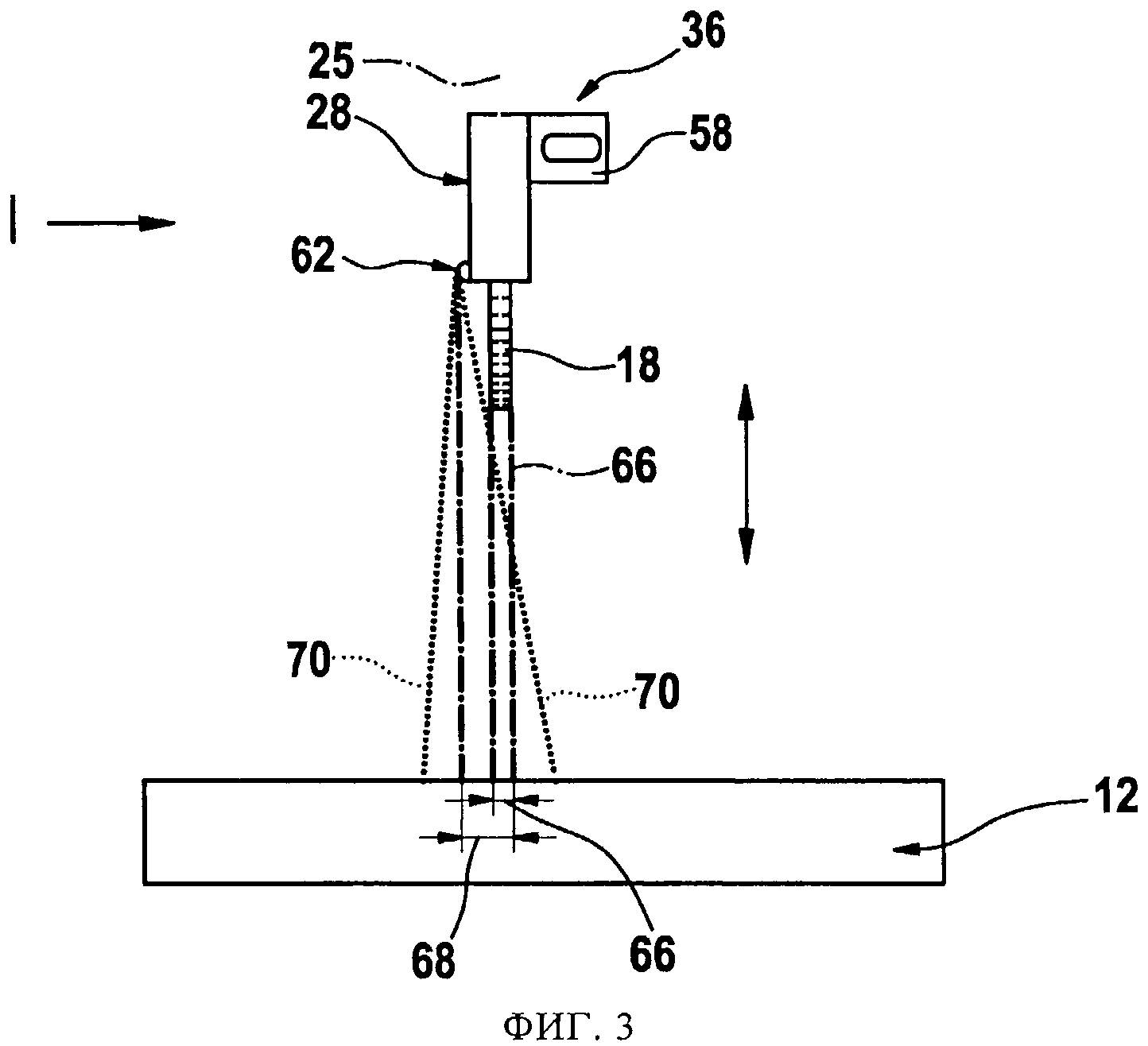
на фиг.3 - пильный диск и зона рабочего инструмента панельной пилы при виде спереди,
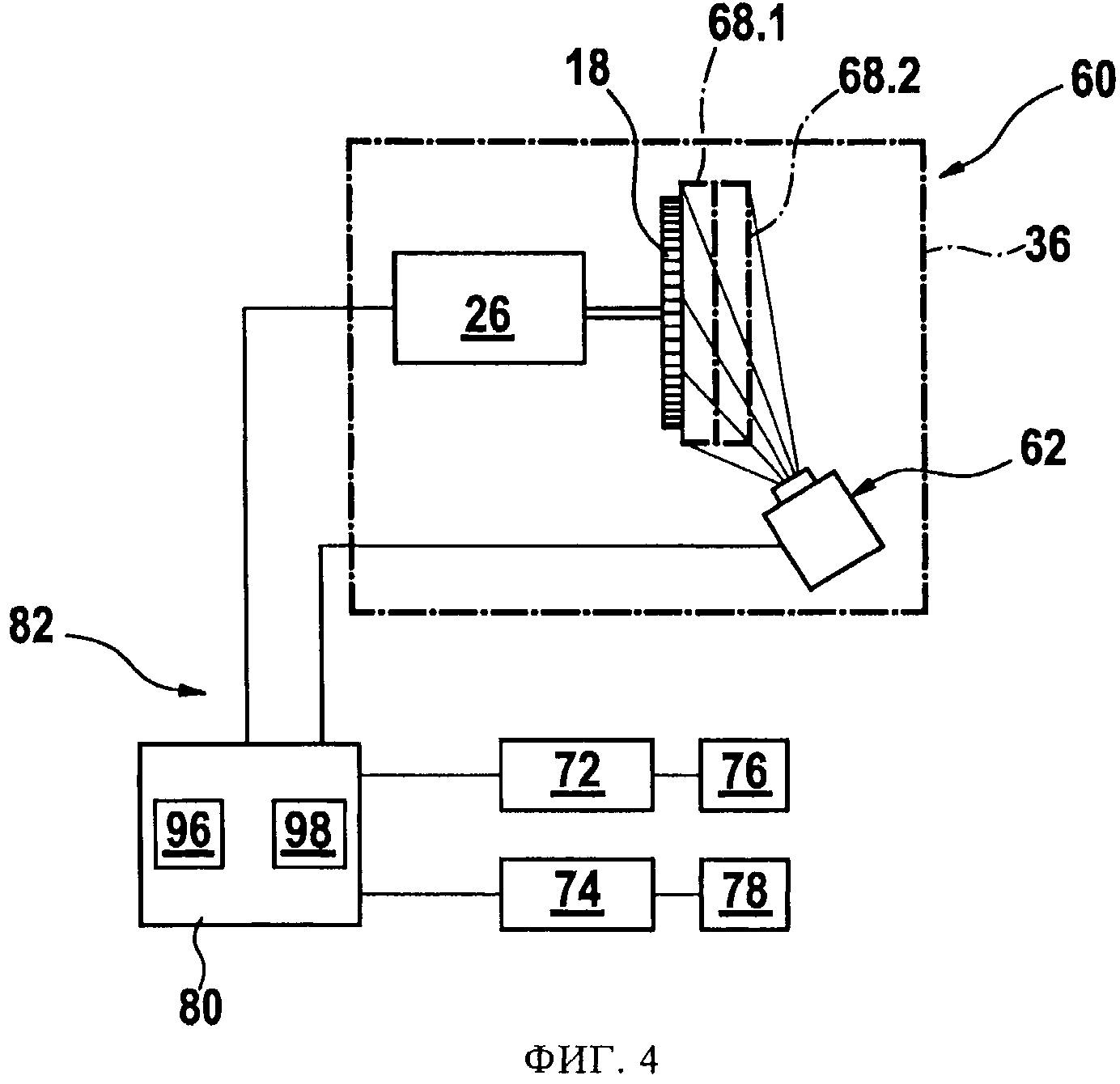
на фиг.4 - блок распознавания с сенсорным блоком, блоком анализа и предохранительными средствами для блокирования перемещения пильного диска,
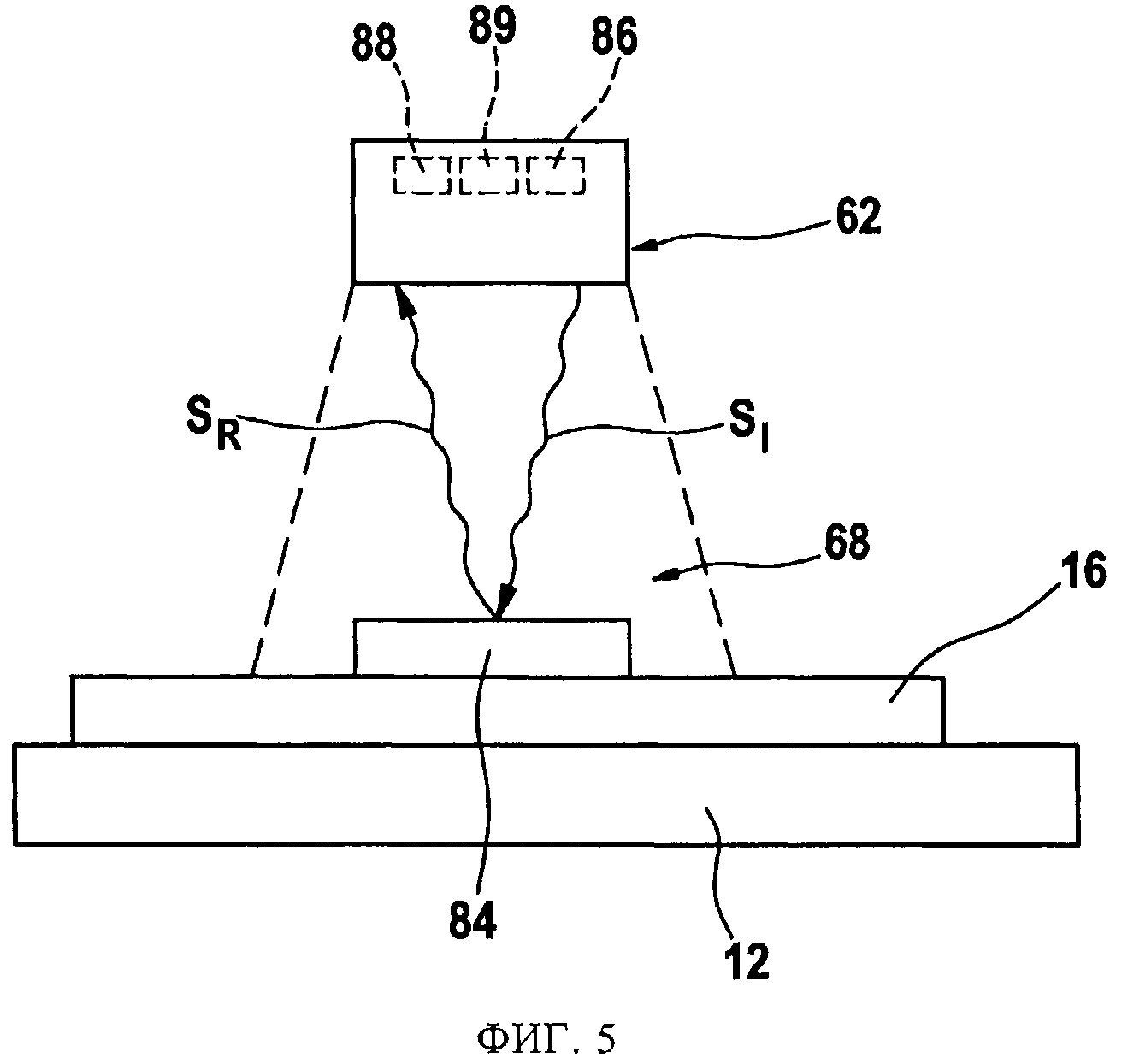
на фиг.5 - схематическое изображение сенсорного блока с передающим устройством для посылки излучения,
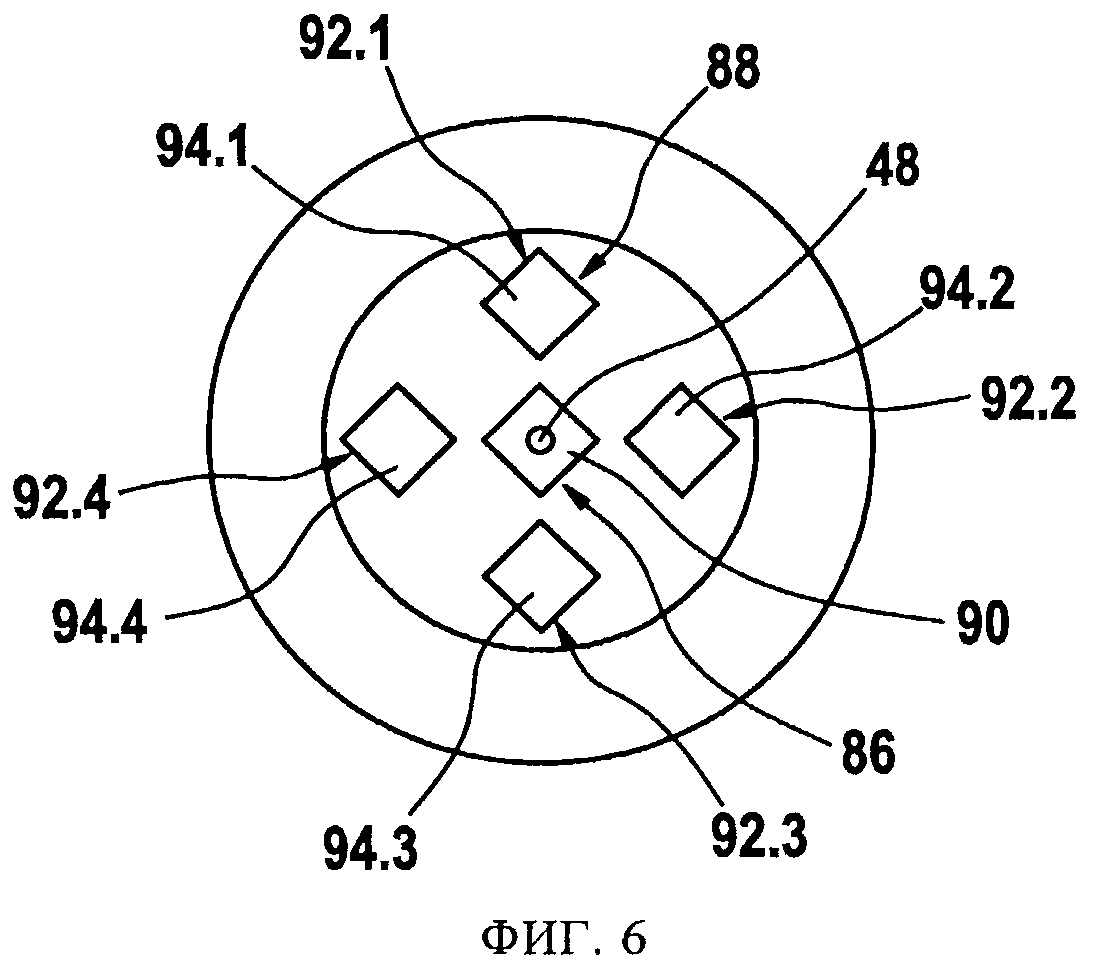
на фиг.6 - сенсорный блок при виде спереди,
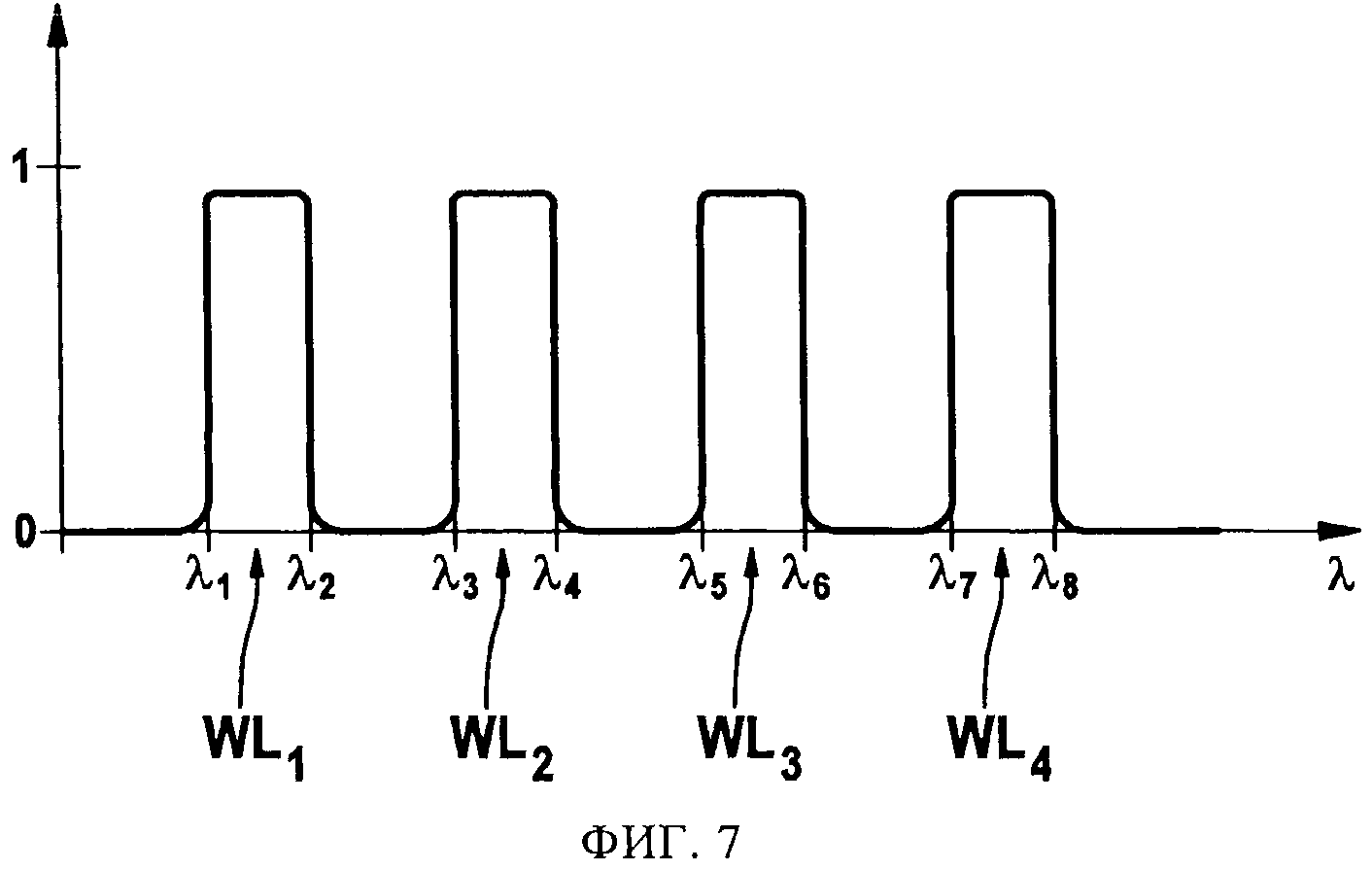
на фиг.7 - зависимость коэффициента пропускания приемного устройства сенсорного блока от длины волны,
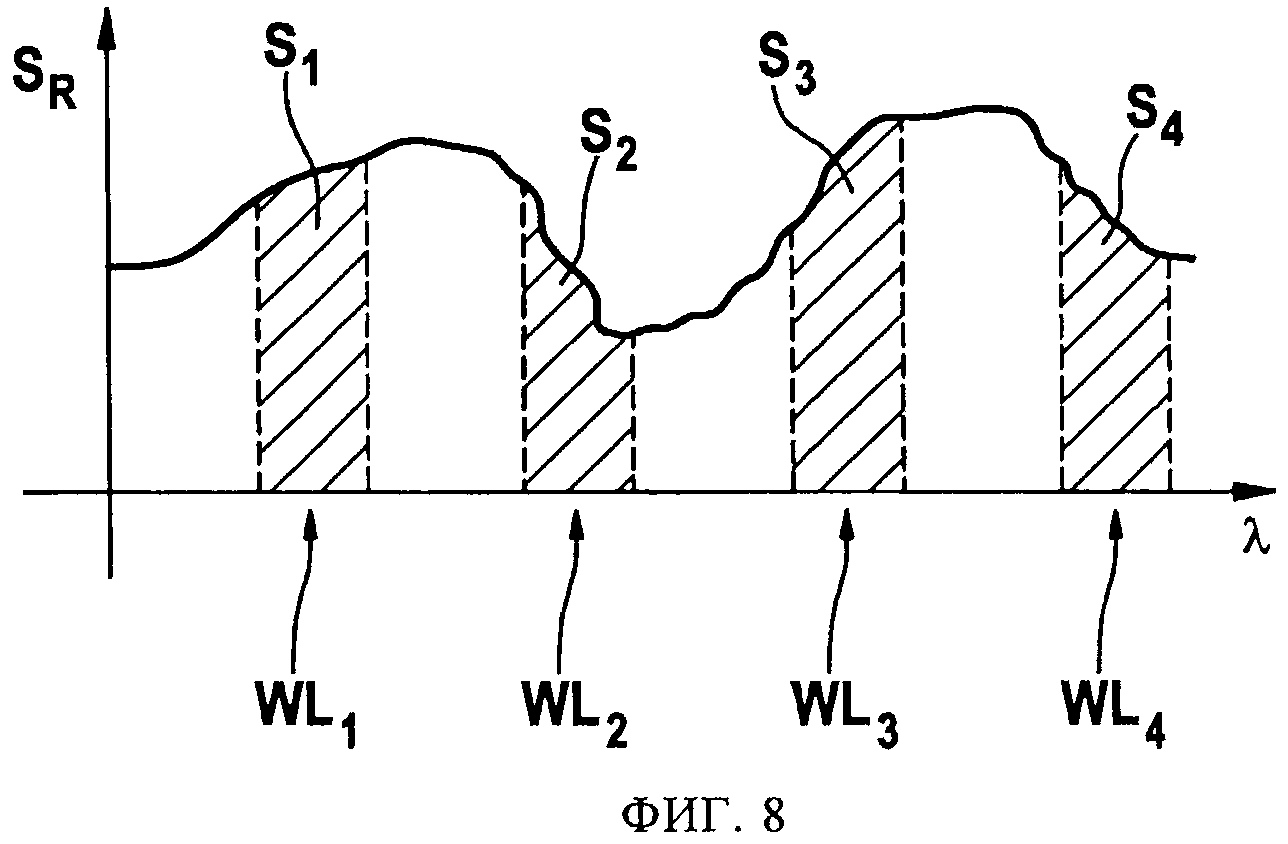
на фиг.8 - спектр отражения излучения, отраженного от отражающего объекта, в зависимости от длины волны,
на фиг.9 - схема внутренних соединений блока распознавания,
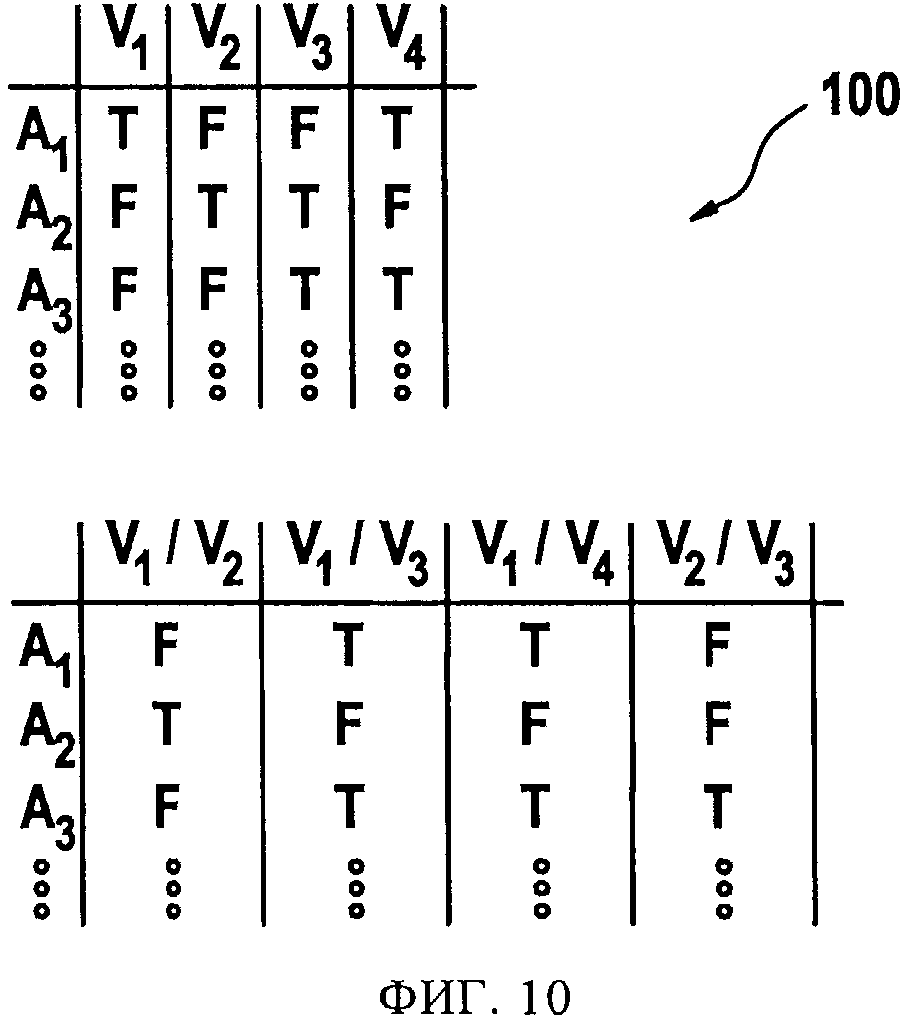
на фиг.10 - база данных, сохраненная в блоке распознавания,
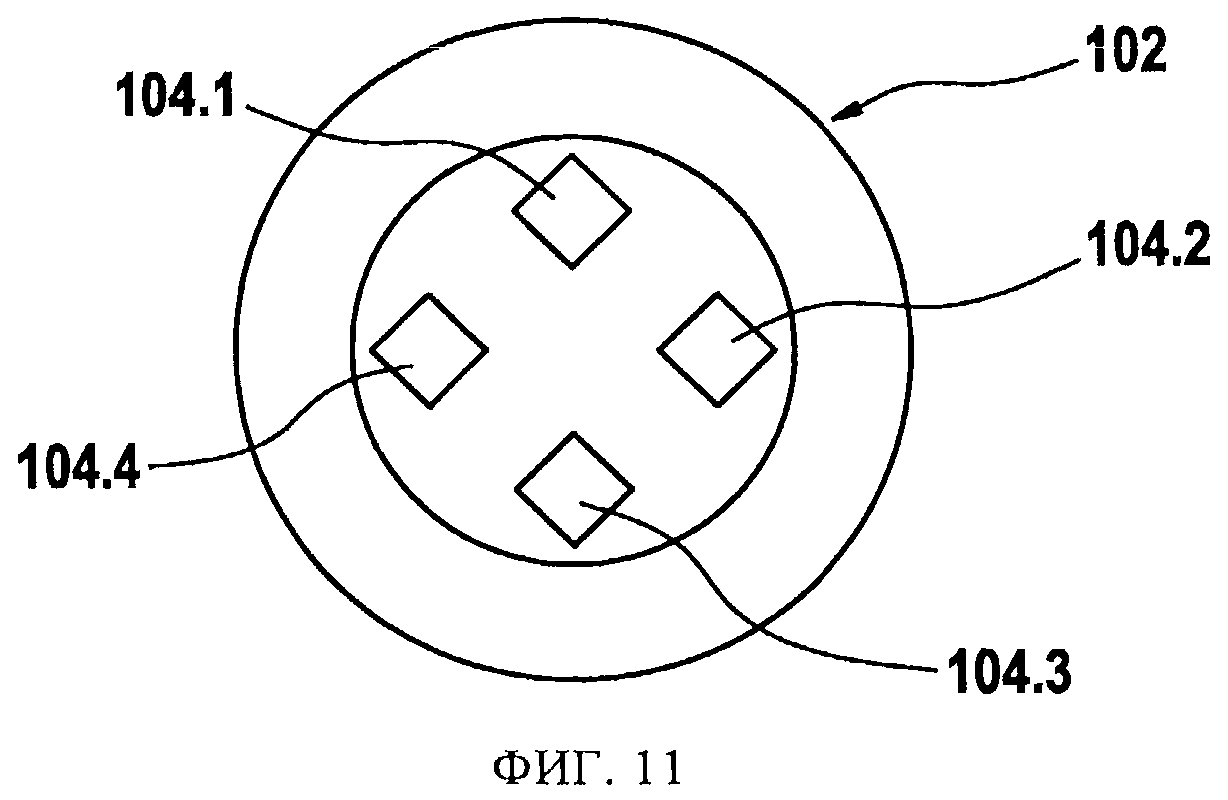
на фиг.11 - альтернативное передающее устройство сенсорного блока для генерации импульсов и
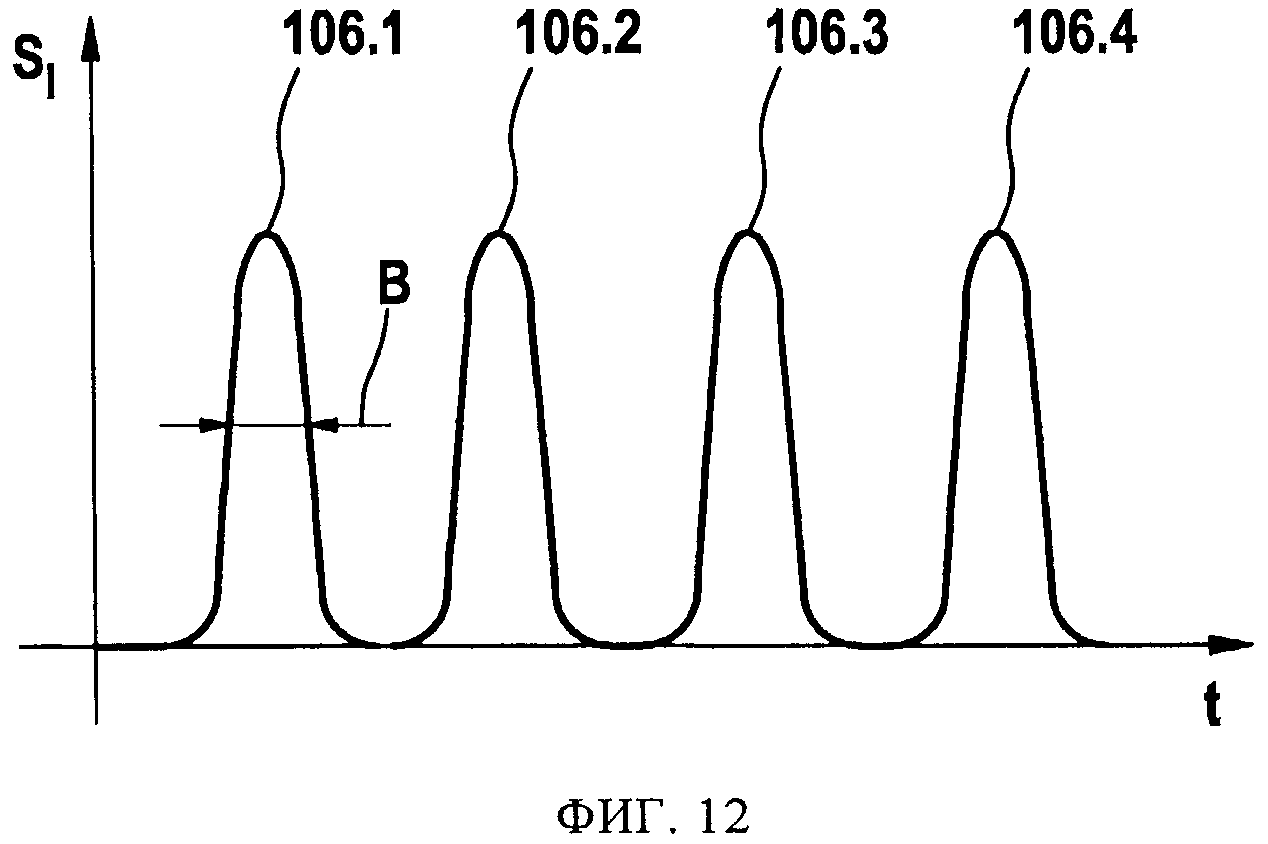
на фиг.12 - характеристика интенсивности излучения, генерируемого передающим устройством, показанным на фиг.11.
Осуществление изобретения
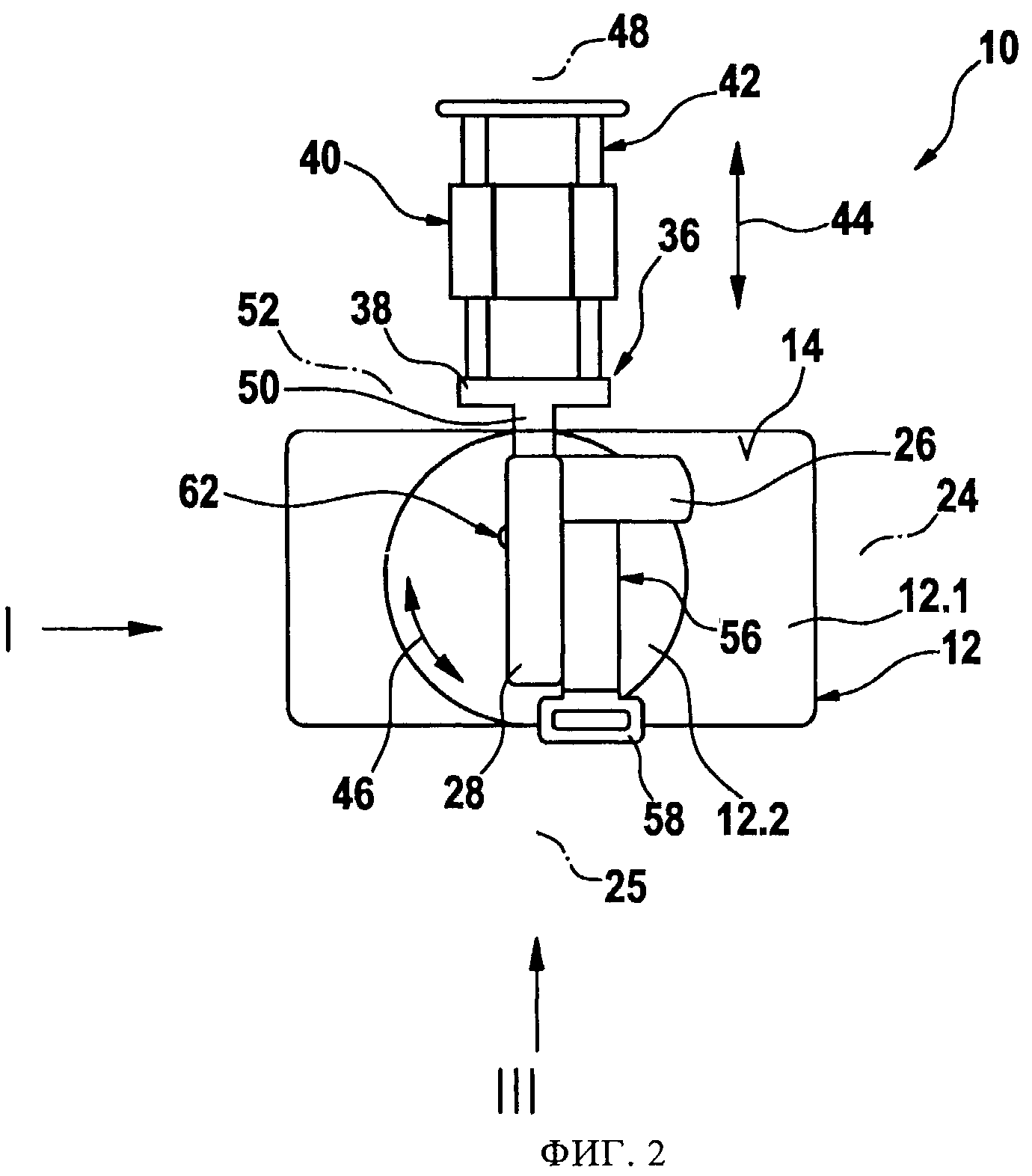
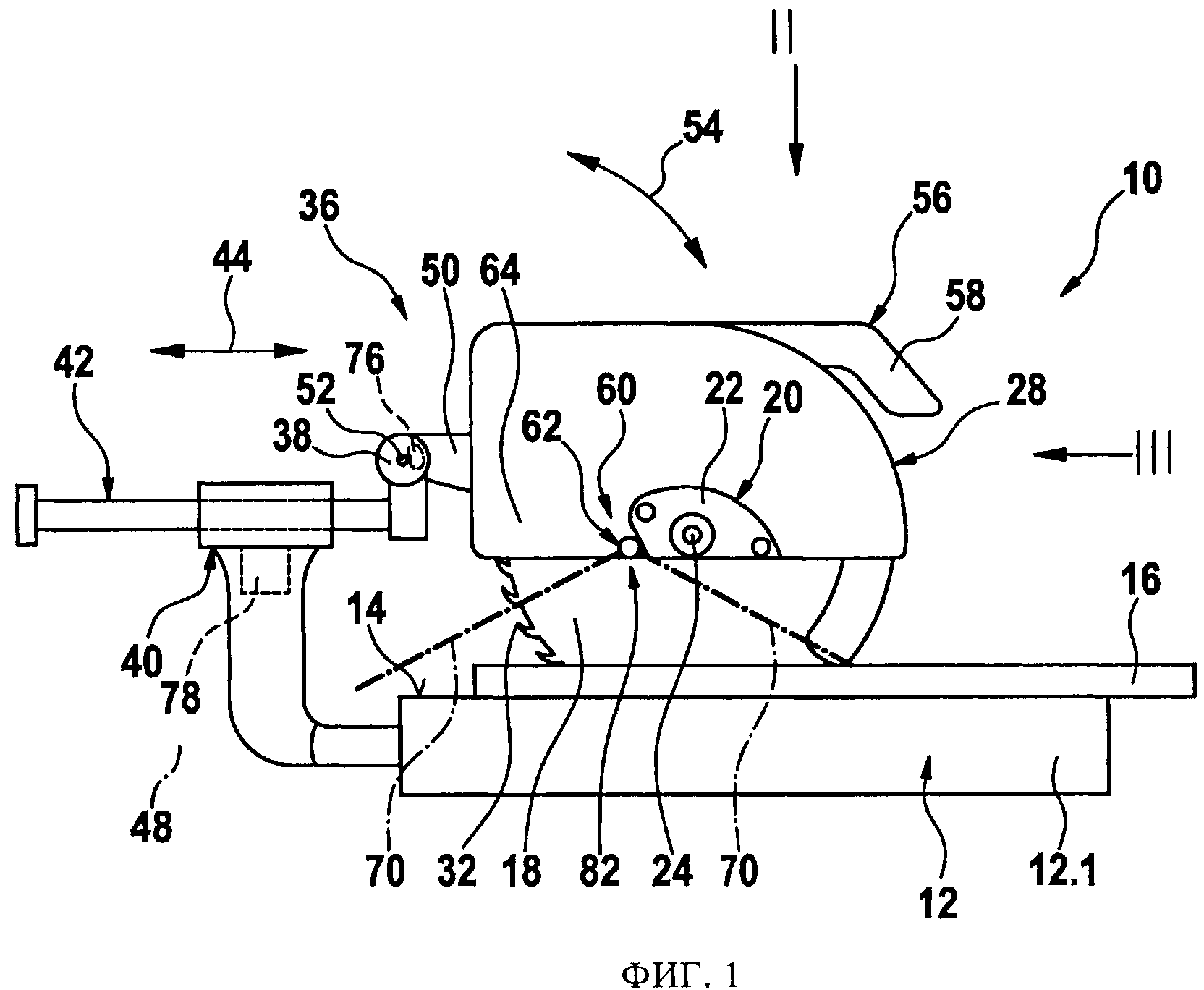
На фиг.1 при виде сбоку показана технологическая машина 10, выполненная в виде стационарного инструмента (станка), а именно - в виде панельной пилы. Приведенное ниже описание также поясняется фиг.2, на которой технологическая машина 10, изображенная на фиг.1, представлена при виде сверху. Технологическая машина 10 также может быть выполнена в виде торцовочно-усорезной пилы или пилы с протягиваемым пильным агрегатом. Технологическая машина 10 имеет рабочий стол 12, образующий рабочую поверхность 14, предусмотренную для расположения, например для укладки (плашмя) или установки (на кант или торец) заготовки, обрабатываемой посредством технологической машины 10. Как показано на фиг.2, рабочий стол 12 имеет первый конструктивный элемент 12.1, неподвижно соединенный с не показанной на чертеже опорной поверхностью или опорным приспособлением для установки или крепления рабочего стола 12, и второй, круглый конструктивный элемент 12.2, установленный с возможностью поворота относительно конструктивного элемента 12.1 вокруг оси, перпендикулярной рабочей поверхности 14. На фиг.1 на рабочую поверхность 14 уложена распиливаемая заготовка 16, представляющая собой деревянную доску. Для обработки заготовки 16 технологическая машина 10 содержит рабочий инструмент 18, выполненный в виде пильного диска, т.е. круглого пильного полотна. Для установки рабочего инструмента 18 предусмотрен узел 20 крепления рабочего инструмента технологической машины 10. Узел 20 крепления рабочего инструмента имеет опору 22, предназначенную для установки рабочего инструмента 18 с возможностью вращения вокруг оси 24 вращения. При этом узел 20 крепления рабочего инструмента определяет для рабочего инструмента 18 плоскость 25 вращения, в которой находится центр тяжести рабочего инструмента 18 и которая перпендикулярна оси 24 вращения. При обработке заготовки 16 рабочий инструмент 18 приводится во вращение вокруг оси 24 вращения посредством узла 26 привода, выполненного в виде электродвигателя. Для защиты оператора от соприкосновения с рабочим инструментом 18 технологическая машина 10 снабжена защитным устройством 28, предусмотренным для ограждения рабочего инструмента 18 и выполненным в виде защитного колпака, закрывающего режущую кромку 32 рабочего инструмента 18 по меньшей мере на половину ее окружности. Как показано на фиг.1, узел 20 крепления рабочего инструмента закреплен на защитном устройстве 28. Рабочий инструмент 18, узел 20 крепления рабочего инструмента, узел 26 привода и защитное устройство 28 являются составными частями обрабатывающего узла 36, установленного подвижно относительно рабочего стола 12, в частности относительно конструктивного элемента 12.1. Для этого технологическая машина 10 имеет опорный узел 38, который обеспечивает подвижную установку обрабатывающего узла 36, в том числе, в частности, узла 20 крепления рабочего инструмента, относительно рабочей поверхности 14 и посредством которого узел 20 крепления рабочего инструмента соединен с рабочей поверхностью 14. Обрабатывающий узел 36 можно поворачивать посредством опорного узла 38 и опускного рычага 50 вокруг горизонтальной оси 52 вращения, ориентированной параллельно оси 24 вращения. Таким образом, рабочий инструмент 18 со своей осью 24 вращения установлен с возможностью перемещения вдоль изогнутой траектории 54 движения, которая ведет из показанного на фиг.3 исходного положения обрабатывающего узла 36 в его показанное на фиг.1 более глубокое рабочее положение по направлению к обрабатываемой заготовке 16.
Опорный узел 38 сам установлен подвижно относительно рабочего стола 12. Для этого технологическая машина 10 имеет второй опорный узел 40. Опорный узел 40 выполнен с отверстиями, в которых с возможностью направленного перемещения размещен направляющий узел 42. Этот направляющий узел 42, неподвижно соединенный с опорным узлом 38, взаимодействуя с опорным узлом 40, служит для направления перемещения обрабатывающего узла 36, в том числе, в частности, узла 20 крепления рабочего инструмента, и опорного узла 38 относительно рабочей поверхности 14. Это направленное перемещение осуществляется в прямолинейном направлении 44, проходящем параллельно рабочей поверхности 14 и перпендикулярно оси 52 вращения. Опорные узлы 38, 40 и обрабатывающий узел 36 можно также поворачивать в направлении 46 вращения вокруг оси, проходящей перпендикулярно рабочей поверхности 14. Опорный узел 40 сам может быть выполнен подвижным относительно рабочего стола 12, а именно относительно его конструктивного элемента 12.2. В частности, его можно поворачивать вокруг оси 48 наклона, проходящей горизонтально и параллельно направлению 44 перемещения, что позволяет осуществлять наклон обрабатывающего узла 36 относительно рабочей поверхности 14.
Перемещения обрабатывающего узла 36 относительно рабочей поверхности 14 могут совершаться путем приложения усилий оператором. Для этого технологическая машина 10, а именно ее обрабатывающий узел 36, снабжена узлом 56 приложения усилий, предусмотренным для перемещения узла 20 крепления рабочего инструмента относительно рабочей поверхности 14 оператором. Этот узел имеет ручку 58, предусмотренную для того, чтобы за нее мог взяться рукой оператор. Таким образом, оператор может прикладывать усилия на перемещение обрабатывающего узла 36 в горизонтальном направлении 44 перемещения и на перемещение обрабатывающего узла 36 вокруг оси 52 вращения вдоль траектории 54 движения по направлению к рабочей поверхности 14 и обратно. При оперировании технологической машиной 10 оператор одной рукой держит ручку 58, а другую руку обычно кладет на заготовку 16. Для предотвращения контакта руки оператора с вращающимся рабочим инструментом 18 технологическая машина 10 снабжена устройством 60 контроля обстановки вблизи работающего инструмента. Это обеспечивается сенсорным блоком 62, принцип работы которого описывается ниже. Сенсорный блок 62 неподвижно соединен с обрабатывающим узлом 36, а именно с узлом 20 крепления рабочего инструмента. При этом сенсорный блок 62 закреплен на защитном устройстве 28. Защитное устройство 28 служит средством 64 сообщения движения, предназначенным для того, чтобы при любом перемещении узла 20 крепления рабочего инструмента относительно рабочей поверхности 14 обеспечивать совместное с ним перемещение сенсорного блока 62.
На фиг.3 показан обрабатывающий узел 36 в его исходном положении при виде спереди. Подвижность рабочего инструмента 18 определяет зону 66 пути перемещения рабочего инструмента, которая соответствует области пространства, в которой потенциально может оказаться рабочий инструмент 18. Зона 66 пути перемещения рабочего инструмента обозначена вертикальными штрихпунктирными линиями. Зона 66 пути перемещения рабочего инструмента вытянута, также ввиду подвижности рабочего инструмента 18, горизонтально и перпендикулярно плоскости чертежа в направлении 44 перемещения рабочего инструмента. Устройство 60 контроля обстановки вблизи работающего инструмента служит для наблюдения за зоной 68 рабочего инструмента. Эта зона 68 рабочего инструмента включает в себя зону 66 пути перемещения рабочего инструмента и, кроме того, состоит из точек, для которых наименьшее расстояние до зоны 66 пути перемещения рабочего инструмента составляет не более 2 см. Контролируемая зона 68 рабочего инструмента, расположенная снаружи зоны 66 пути перемещения рабочего инструмента, расположена сбоку от плоскости 25 вращения, а именно с противоположной, относительно плоскости 25 вращения, стороны узла 56 приложения усилий, в частности ручки 58. Зона 66 пути перемещения рабочего инструмента и зона 68 рабочего инструмента схематично выделены штрихпунктирными линиями. Сенсорный блок 62 имеет поле 70 охвата (поле зрения), обозначенное на фиг.3 пунктирными линиями (см. также фиг.1) и определяющее контролируемую зону технологической машины 10, которая включает в себя значительную часть зоны 68 рабочего инструмента. Как показано на фиг.3, эта контролируемая зона также может включать в себя часть зоны 66 пути перемещения рабочего инструмента. Для контроля зоны 68 рабочего инструмента сенсорный блок 62 расположен сбоку от плоскости 25 вращения и рабочего инструмента 18, а именно с противоположной узлу 56 приложения усилий, в частности ручке 58, стороны плоскости 25 вращения. При этом узел 56 приложения усилий и сенсорный блок 62 расположены по обе стороны плоскости 25 вращения.
На фиг.4 показана в схематическом представлении функциональная схема технологической машины 10. Технологическая машина 10 имеет исполнительные органы 72, 74, предусмотренные для осуществления мер безопасности во взаимодействии с устройством 60 контроля обстановки вблизи работающего инструмента. Исполнительные органы 72, 74 предусмотрены для приведения в действие предохранительных средств 76 и 78 соответственно. Предохранительное средство 76, которое на фиг.1 обозначено схематично, представляет собой блокировочное средство, выполненное в виде зажима и расположенное в зоне оси 52 вращения. Кроме того, предохранительное средство 76 может быть выполнено в виде зубчатого колеса. В частности, предохранительное средство 76 расположено в опорном узле 38. Предохранительное средство 76 служит для того, чтобы блокировать совершаемое усилием оператора вращательное движение обрабатывающего узла 36 вокруг оси 52 вращения, т.е. перемещение рабочего инструмента 18 вдоль траектории 54 движения. В положении, обеспечивающем возможность этого перемещения, предохранительное средство 76 удерживается в подпружиненном состоянии. Для этого может использоваться, например, механическая пружина и/или втягивающий электромагнит. Исполнительный орган 72 служит для того, чтобы переводить предохранительное средство 76 из вышеупомянутого положения, обеспечивающего возможность перемещения рабочего инструмента, в запирающее положение, препятствующее этому перемещению, а также возвращать предохранительное средство 76 в положение, обеспечивающее возможность перемещения рабочего инструмента. Предохранительное средство 78, которое также схематично изображено на фиг.1, расположено в опорном узле 40. Оно служит для того, чтобы блокировать совершаемое усилием оператора перемещение обрабатывающего узла 36 в направлении 44. Предохранительное средство 78 представляет собой блокировочное средство, также выполненное в виде зажима, клинового элемента и/или фиксатора (защелки), например стопорного штифта, и может приводиться в действие посредством исполнительного органа 74 для блокирования подачи (перемещения вперед) направляющего узла 42. В этом отношении можно сослаться на описание предохранительного средства 76.
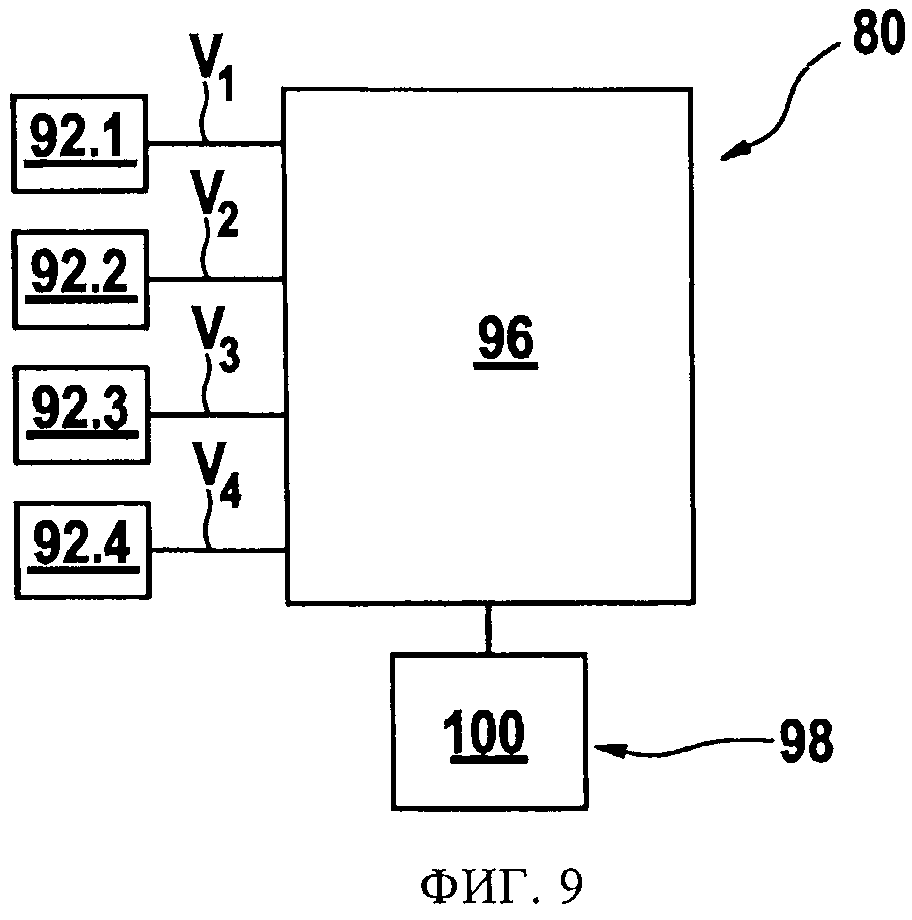
Исполнительные органы 72, 74 приводят в действие предохранительные средства соответственно 76 и 78 в зависимости от сигнала устройства 60 контроля обстановки вблизи работающего инструмента, а именно сигнала от блока анализа 80 устройства 60 контроля обстановки вблизи работающего инструмента. Блок анализа 80 во взаимодействии с сенсорным блоком 62 образует блок 82 распознавания, предусмотренный для распознавания присутствия человеческой ткани в зоне 68 рабочего инструмента. Если блоком 82 распознавания обнаружено присутствие человеческой ткани в зоне 68 рабочего инструмента, передается пусковой сигнал на исполнительный орган 72 и/или 74, который на основании этого пускового сигнала инициирует описанную выше блокировку перемещения узла 20 крепления рабочего инструмента относительно рабочей поверхности 14. Для этого блок анализа 80 функционально связан с исполнительными органами 72, 74. Кроме того, в зависимости от подобного пускового сигнала можно затормозить или прекратить совершаемое от привода главное движение рабочего инструмента 18. Для этого блок анализа 80 функционально связан с узлом 26 привода. Вместо этого или дополнительно к этому может быть предусмотрен еще один исполнительный орган, связанный с блоком 80 анализа и предназначенный для затормаживания рабочего инструмента 18. Этот исполнительный орган может приводить в действие предохранительное средство, выполненное, например, в виде тормозного диска или тормозного барабана и связанное с не показанным на чертежах валом, расположенным в узле 20 крепления рабочего инструмента и приводимым узлом 26 привода для осуществления вращения рабочего инструмента 18 вокруг оси 24 вращения.
Также предлагается разделить зону 68 рабочего инструмента, контролируемую сенсорным блоком 62, на несколько изображенных на фиг.4 функциональных областей, каждая из которых соответствует определенному режиму обеспечения безопасности. Так, например, зона 68 рабочего инструмента может быть поделена на опасную область 68.1, в которой предусмотрена активизация описанных выше режимов обеспечения безопасности, и область 68.2 предупреждения. Эта область 68.2 предупреждения в предпочтительном варианте примыкает к опасной области 68.1 и расположена в направлении оси 24 вращения перед опасной областью 68.1, глядя в сторону плоскости 25 вращения, и обладает протяженностью в этом направлении, составляющей, например, 1 см. Если блок 82 распознавания обнаружит присутствие части человеческого тела в области 68.2 предупреждения, блок анализа 80 выдаст предупредительный сигнал для предупреждения оператора. Это предупреждение может осуществляться оптическими или акустическими средствами, или оно может быть реализовано с помощью описанной выше блокировки перемещения обрабатывающего узла посредством предохранительного средства 76 и/или 78, тогда как торможение или остановка привода рабочего инструмента происходит лишь в том случае, если присутствие части человеческого тела обнаружено в опасной области 68.1.
Принцип работы блока 82 распознавания описан ниже со ссылкой на фиг.5. На чертеже в схематичном представлении показаны рабочий стол 12, заготовка 16 и сенсорный блок 62. Для наглядности рабочий инструмент 18 и защитное устройство 28 на чертеже не показаны. На заготовке 16 в зоне 68 рабочего инструмента расположен исследуемый объект 84. Таковым может быть, в частности, рука оператора, другой посторонний объект или просто поверхность заготовки 16. Сенсорный блок 62 содержит передающее устройство 86, которое во время работы технологической машины посылает излучение SI в зону 68 рабочего инструмента. Это излучение SI отражается от исследуемого объекта 84 и принимается схематично изображенным на чертеже приемным устройством 88 сенсорного блока 62 в виде излучения SR. Сенсорный блок 62 также содержит блок 89 разметки, предназначенный для разметки (маркировки) зоны 68 рабочего инструмента.
На фиг.6 передающее устройство 86 и приемное устройство 88 сенсорного блока 62 показаны в виде спереди, на котором оптическая ось этой системы проходит через плоскость чертежа. Передающее устройство 86 содержит передатчик 90, выполненный в виде светоизлучающего диода (СИД). В окрестности передатчика 90 и в непосредственной близости к нему расположено четыре чувствительных элемента 92 приемного устройства 88, каждый из которых выполнен в виде фотодиода.
Каждый из чувствительных элементов 92 имеет диапазон чувствительности 94, предусмотренный для регистрации излучения в своем (отличном от других) диапазоне длин волн WL1=[λ1, λ2], WL2=[λ3, λ4], WL3=[λ5, λ6] и WL4=[λ7, λ8]. Это схематично показано на фиг.7. На фиг.7 показана зависимость коэффициента пропускания приемного устройства 88 от длины волны λ отраженного излучения SR, принимаемого приемным устройством 88. В рассматриваемом варианте осуществления изобретения диапазоны длин волн WLi разнесены, не перекрываясь друг с другом. Диапазоны длин волн WLi имеют центральные длины волн, равные, например, 630 нм, 700 нм, 980 нм, 1050 нм и 1200 нм, и являются узкополосными, имеющими ширину полосы примерно 10 нм. Для узкополосной фильтрации регистрируемого излучения SR приемное устройство 88, помимо чувствительных элементов 92, может быть снабжено системой фильтрующих компонентов, установленных перед чувствительными элементами 92. При выполнении чувствительных элементов 92 в виде селективных фотодиодов функция узкополосной фильтрации присуща самой системе, что позволяет обходиться без дополнительных фильтрующих компонентов. Вместо фотодиодов или в дополнение к ним чувствительные элементы 92 могут быть выполнены в виде матриц на приборах с зарядовой связью (ПЗС-матрицы) или матриц, выполненных по технологии комплементарной логики на транзисторах металл-оксид-полупроводник (КМОП-матрицы), детекторов InGaAs, пироэлектрических детекторов и т.д.
Диапазоны длин волн WL2, WL3, WL4 расположены в инфракрасной области спектра. В частности, каждый из этих диапазонов длин волн WL2, WL3, WL4 является диапазоном ближней инфракрасной области спектра IR-A с граничными значениями [700 нм, 1400 нм]. Диапазон длин волн WL1 расположен, по меньшей мере частично, в видимой области электромагнитного спектра. В качестве альтернативы или дополнения могут быть выбраны диапазоны длин волн в инфракрасных областях спектра IR-B (1,4-3 мкм) и IR-C (3-15 мкм). Передающее устройство 86 с передатчиком 90 генерирует излучение, которое включает в себя показанные на фиг.7 диапазоны длин волн WLi.
Принцип распознавания присутствия человеческой ткани в зоне 68 рабочего инструмента поясняется с помощью фиг.8, 9, и 10. На фиг.8 показан спектр отражения для излучения SR, отраженного исследуемым объектом 84 и зарегистрированного чувствительными элементами 92. Этот спектр отражения соответствует распределению интенсивности сигнала в зависимости от длины волны λ излучения SR. Каждый из чувствительных элементов 92, или диапазонов чувствительности 94, воспринимает/охватывает свою часть спектра отражения в соответствующем диапазоне длин волн WLi. Каждый из чувствительных элементов 92 вырабатывает на своем выходном зажиме параметр Vi излучения, который в каждом случае представляет собой электрическое напряжение. Например, параметр V1 излучения пропорционален интенсивности сигнала S1 излучения SR, проинтегрированной по длинам волн диапазона WL1 и обозначенной на фиг.8 штриховкой.
Как показано на фиг.9, параметры Vi излучения подаются на вход средства 96 анализа, например микропроцессора, блока 80 анализа. В еще одном варианте осуществления изобретения параметры Vi излучения могут подвергаться усилению. При выполнении анализа параметры Vi излучения сравниваются посредством логических операций со значениями из базы данных 100, сохраненной в запоминающем устройстве 98 блока анализа 80. Эта база данных 100 схематично представлена на фиг.10. Согласно первой стратегии анализа зарегистрированные параметры Vi излучения сравниваются с хранящимися в памяти значениями A1, A2, A3 и т.д. Каждой паре (Vi, Ai) значений ставится в соответствие (присваивается) переменная результата распознавания, которая может принимать значения "ложно" (F) или "истинно" (Т). При значении "F" присутствие человеческой ткани в зоне 68 рабочего инструмента исключается. Согласно второй, используемой в качестве альтернативы или дополнения, стратегии анализа средство 96 анализа определяет отношения различных параметров Vi излучения: V1/V2; V1/V3 и т.д. Эти отношения сравниваются с хранящимися в памяти значениями A1, А2, А3 и т.д., на основании, как указано выше, можно сделать вывод о присутствии человеческой ткани в зоне 68 рабочего инструмента. Формирование отношений параметров позволяет сделать распознавание не зависящим от интенсивности излучения. В запоминающем устройстве 98 можно также хранить информацию о спектральной чувствительности чувствительных элементов 92, которая может использоваться для анализа параметров Vi излучения.
В альтернативном варианте осуществления изобретения, показанном на фиг.11 и 12, сенсорный блок 62 снабжен передающим устройством 102, содержащим по меньшей мере два, в частности по меньшей мере три и особенно предпочтительно по меньшей мере четыре передатчика 104.1-104.4, предназначенных для передачи излучения в различных (отличных друг от друга) диапазонах длин волн WL1-WL4 и последовательно включаемых во время работы передающего устройства 102. На фиг.11 показано передающее устройство 102, генерирующее излучение SI, имеющее вид серии импульсов 106.1-106.4 и представленное на фиг.12. На фиг.12 показана характеристика изменения интенсивности излучения SI в зависимости от времени t. Импульс 106 имеет ширину В, составляющую примерно 100 мкс. Передающее устройство 102 предусмотрено для последовательно осуществляемой передачи излучения в диапазонах длин волн WL1-WL4. При этом каждый импульс последовательности из четырех следующих друг за другом импульсов 106.1-106.4 поставлен в соответствие своему (отличному от других) диапазону длин волн WL1-WL4. Каждый из передатчиков 104 может быть выполнен, например, в виде СИД. Благодаря такому последовательному излучению в различных диапазонах длин волн WLi можно отказаться от сложной и ресурсоемкой фильтрации зарегистрированного отраженного излучения SR.
Технологическая машина с рабочим инструментом в виде пильного полотна
Система экстренного торможения для технологических машин
Устройство для шарнирного соединения щетки стеклоочистителя
Топливная форсунка
Рабочий стол для технологических машин
Ручная машина
Секционный отопительный котел из чугуна или алюминия
Медицинское детекторное устройство для обнаружения апноэ и/или гипопноэ во сне
Ультразвуковая система помощи водителю, способ ее конфигурирования и соответствующий ультразвуковой датчик
Переходник для технологической машины
Напорный патрубок для системы впрыска топлива с общей магистралью
Система помощи водителю транспортного средства и способ управления ее работой
Технологическая машина, прежде всего настольная дисковая пила с нижним расположением пильного диска
Щетка стеклоочистителя
Тормозная система и способ управления тормозной системой
Топливная форсунка, клапанный элемент управляющего клапана которой имеет опорную часть
Способ определения углового положения коленчатого вала двигателя внутреннего сгорания
Ручная машина с щеточным электродвигателем
Ручная машина, прежде всего ручная шлифовальная машина
Предохранительная система для технологических машин

