Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ
Вид РИД
Изобретение
Изобретение относится к водному транспорту, а именно к силовым энергетическим установкам, и может быть использовано на отдельных его видах для уменьшения потребления горюче-смазочных материалов и сокращения вредных выбросов в атмосферу двигателем внутреннего сгорания.
Известен способ управления комбинированной энергоустановкой (КЭУ) последовательного типа (заявка на патент RU 2007142589/11 от 20.11.2007), в котором первичный источник энергии используют в стационарном режиме и с переменной выходной мощностью с различной скоростью ее изменения и с одновременным контролем фактического значения степени заряженности используемого буферного накопителя энергии (БНЭ) в процессе работы КЭУ.
Недостатком данного способа является необходимость соответствующего воздействия на первичный источник энергии в зависимости от степени заряженности используемого БНЭ.
Известен способ управления судовой КЭУ [Фиясь И.П., Евграфов В.В. Обратимая валогенераторная установка с полупроводниковым преобразователем частоты. - М.: В/О, "Мортехинформреклама", сборник научных трудов, 1987, С.68-74], принятый за прототип, позволяющий производить отбор мощности от главного двигателя (ГД) посредством валогенератора (ВГ), установленного на гребной вал.
Известный способ заключается в том, что судно приводят в движение посредством ГД через разобщительную муфту и редуктор; на редуктор навешивают ВГ небольшой мощности ((10…15)% от мощности ГД). Воздействуя на рейку топливного насоса ГД, изменяют частоту вращения гребного винта и, соответственно, ВГ. Последний автоматически посредством полупроводникового преобразователя частоты (ППЧ) и его системы управления подключается к шинам судовой электростанции при частоте его вращения выше минимально допустимой. Отбор тока от ВГ производится автоматически через тот же ППЧ независимо от мощности на гребном винте.
При возникновении перегрузки ГД автоматически производят временное отключение второстепенных судовых потребителей электроэнергии. В том случае, если требуется получить наибольшую скорость судна, то ВГ посредством ППЧ и его системы управления переводят в двигательный режим, к которому подают питание от вспомогательных тепловых генераторных агрегатов, которые экстренно запускают. Таким путем обеспечивают одновременную работу двух двигателей - теплового (ГД) и электрического (ВГ) - на гребной винт через редуктор.
В том случае, если ГД выйдет из строя, то его отсоединяют от редуктора посредством разобщительной муфты. Движение судна в этом случае обеспечивают только за счет ВГ, работающего в двигательном режиме.
Известный способ обладает рядом эксплуатационных, экономических и экологических недостатков. Во-первых, для изменения скорости судна требуется регулировать частоту вращения ГД, что сопряжено с его переходными режимами работы. Во-вторых, при движении судна с различными промежуточными скоростями невозможно обеспечить номинальный режим работы ГД. В таких случаях последний работает с пониженным коэффициентом полезного действия (КПД), повышенным удельным расходом топлива, т.е. снижается экономичность, доля вредных веществ в выхлопных газах увеличивается многократно, т.е. ухудшается экологичность. С такими же показателями работает ГД и в переходных режимах. В-третьих, отбор тока от ВГ возможен в том случае, когда частота вращения ГД по известному способу будет выше нижней эксплуатационной. Расчет магнитной цепи и системы возбуждения такого ВГ, исходя из полной нагрузки валогенераторной установки (ВГУ) при низшей эксплуатационной скорости вращения гребного вала, ведет к недоиспользованию ВГ по мощности при номинальной скорости и, как следствие, - к неоправданному конструктивно завышению установленной мощности, габаритов и стоимости ВГУ. В-четвертых, для работы ВГ в двигательном режиме используют вспомогательные тепловые двигатели (дизель-генераторы), работающие на более дорогом (светлом сорте) топливе. Эксплуатация ВГ в режиме двигателя является достаточно неэкономичной.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в устранении указанных эксплуатационных, экономических, конструктивных и экологических недостатков, в том числе: обеспечить номинальный режим работы ГД в условиях переменной нагрузки на гребном валу, т.е. номинальную частоту вращения и номинальный его крутящий момент, и как следствие, экологичность, характеризующие статический режим работы главного двигателя.
Поставленная задача достигается тем, что в известном способе управления судовой комбинированной энергетической установкой, заключающемся в том, что приводят в движение судно гребным винтом посредством главного двигателя с разобщительной муфтой перед редуктором гребного вала, а также посредством и/или валогенератора, кинематически связанными через редуктор с гребным винтом судна, изменяют частоту вращения главного двигателя и/или валогенератора (работающего в двигательном режиме) соответственно путем изменения подаваемого на него от вспомогательного источника электроэнергии напряжения посредством полупроводникового преобразователя частоты и его системы управления; осуществляют генераторный режим, при работе главного двигателя, параллельной работы валогенератора со вспомогательным источником электроэнергии с отбором электроэнергии посредством полупродникового преобразователя и его системы управления в судовую сеть от валогенератора и вспомогательного источника электроэнергии при необходимости, а в случае перехода вспомогательного источника электроэнергии на автономную работу поддерживают постоянным напряжение на шинах судовой сети посредством полупроводникового преобразователя и его системы управления, в отличие от него в заявляемом способе гребной винт используют в виде гребного винта регулируемого шага, первоначальные разгон, регулирование частоты вращения гребного вала и движение судна осуществляют при разомкнутой разобщительной муфте главного двигателя путем привода гребного вала от валогенератора посредством подачи на него электроэнергии от такого вспомогательного источника электроэнергии и его полупроводникового преобразователя, которые используют в виде аккумуляторной батареи с двухсторонним полупроводниковым преобразователем и его системы управления. При этом гребной вал судна соединяют с валогенератором посредством разобщительной муфты валогенератора. С понижением напряжения на выходных шинах аккумуляторной батареи до некоторого среднего значения по сигналу датчика ее напряжения запускают посредством системы дистанционного автоматизированного управления на гребной винт регулируемого шага главный двигатель с включенной его разобщительной муфтой. С момента подключения главного двигателя к гребному винту регулируемого шага регулирование упора гребного винта производят путем изменения его шага посредством системы дистанционного автоматизированного управления, поддерживая постоянной необходимую частоту вращения главного двигателя. При этом при моменте сопротивления на гребном винте регулируемого шага меньше номинального момента, развиваемого главным двигателем, соответствующего некоторому значению α1 угла поворота лопастей винта регулируемого шага, валогенератор переводят посредством системы дистанционного автоматизированного управления в режим генератора, от которого посредством полупроводникового преобразователя частоты и его системы управления отбирают такое количество электроэнергии, которое необходимо для создания дополнительного тормозного момента на валогенераторе, равного разности между номинальным моментом главного двигателя и моментом сопротивления гребного винта регулируемого шага. Определение степени загрузки главного двигателя производят автоматически посредством системы дистанционного автоматизированного управления путем использования показаний датчиков температуры его выхлопных газов. Вырабатываемый валогенератором в данном генераторном режиме переменный ток направляют в судовую сеть и, по необходимости, выпрямляют посредством двухстороннего полупроводникового преобразователя с его системой управления и направляют на подзаряд аккумуляторной батареи. При необходимости получения скорости судна, большей той, которая соответствует углу поворота лопастей α1 винта регулируемого шага, увеличивают его шаг, валогенератор посредством системы дистанционного автоматизированного управления переводят в двигательный режим и обеспечивают частотное регулирование посредством полупроводникового преобразователя частоты данного электродвигателя, источником электроэнергии которого используют аккумуляторную батарею. При снижении напряжения последней и/или ее емкости до минимально допустимого значения ее разряд в данном режиме разряда прекращают и приступают к ее подзаряду по мере наличия избыточной мощности главного двигателя, а угол поворота лопастей винта регулируемого шага ограничивают значением α1, соответствующим мощности на гребном винте, равной номинальной мощности главного двигателя.
Эксплуатационно оправдано, когда аккумуляторную батарею используют такой емкости и напряжения, при которых соответствующая ей зарядная мощность, определяемая из соотношения
P=U·I,
где
P - зарядная мощность аккумуляторной батареи, Вт;
U - среднее зарядное напряжение. В;
I - зарядный ток, А, определяемый из соотношения:
I=K·C,
где
K=0.1…0.3 - коэффициент, зависящий от типа используемой аккумуляторной батареи, 1/ч;
C - емкость аккумуляторной батареи, А·ч,
соизмерима с номинальной мощностью главного двигателя.
Предложенный способ в совокупности его отличительных и ограничительных признаков устраняет вышеперечисленные недостатки за счет одновременного воздействия при установившемся номинальном режиме главного двигателя (ГД) на механизм изменения шага винта и полупроводникового преобразователя частоты (ППЧ), который переводит валогенератор (валомашину), в зависимости от мощности на гребном винте, либо в двигательный режим, либо в генераторный. Аккумуляторная батарея (АБ) при этом служит буферным источником электроэнергии для обратимой синхронной электрической валомашины, являясь либо ее потребителем, либо источником. Это обеспечивает статический номинальный режим работы главного двигателя. Появляется возможность длительной работы на малых ходах без причинения вреда ГД. Предложенный способ управления судовой КЭУ обеспечивает номинальный крутящий момент ГД и номинальную частоту его вращения при любой нагрузке на гребном валу и, в частности, при малых ходах судна, когда дополнительный тормозной момент (генераторный режим) создается ВГ. Упор винта регулируется углом поворота лопастей ВРШ при номинальной частоте вращения ГД.
Заявленный способ с реализующей его системой может быть использован на судах внутрипортового и прибрежного плавания, работающих с частыми маневренными режимами. Большие капитальные вложения в постройку предложенной комбинированной энергетической установки (КЭУ), по сравнению с обычной дизельной, являются окупаемыми вследствие того, что судно с подобной силовой схемой имеет более низкие эксплуатационные расходы. Это достигается, в первую очередь, благодаря тому, что меньший (практически вдвое) по мощности дизельный двигатель работает в номинальном режиме.
Помимо обеспечения поставленной технической задачи, предложенная КЭУ дополнительно позволяет получить следующие эффекты:
- ГД имеет наибольший эксплуатационный ресурс. Известно, что срок службы двигателя внутреннего сгорания (ДВС) зависит от режима его эксплуатации. Переходные процессы, такие как запуск двигателя, изменение момента нагрузки, быстрый останов, а также работа ДВС в частичных режимах сокращают расчетный срок службы. Считается, что каждый запуск ДВС сокращает его на 30 часов. Предложенный способ управления судовой КЭУ позволяет сократить количество переходных процессов ГД и обеспечить его работу с номинальными параметрами;
- благодаря тому что валомашина (вентильный двигатель) обладает абсолютно жесткой механической характеристикой и большой перегрузочной способностью по моменту, повышается степень защиты ГД от возникновения перегрузки;
- имеет достаточно большой диапазон "D" регулирования скорости судна (D>10). При заявляемом способе регулирования скорости судна за счет поворота лопастей винта регулируемого шага (ВРШ) D и число скоростей (n) зависят от числа возможных перекладок лопастей ВРШ. При работе на гребной винт в режиме только электрической машины "n" и "D" зависят от характеристик используемого ППЧ. Существующие современные частотные преобразователи, как известно, по своим возможностям перекрывают требуемые для любого судна "n" и "D" с достаточно большим запасом;
- возможность (за счет особенностей тяговой АБ и электродвигателя) кратковременной форсировки мощности на гребном валу. Как известно, кратность момента перегрузки (КМ) обратимой синхронной электрической машины достигает 2…2,5. Заявляемая АБ допускает по своим формулярным энергетическим параметрам кратковременное увеличение разрядного тока более этого значения. Кратковременная форсировка мощности обратимой синхронной электрической машины ограничивается КМ и максимально допустимым током ППЧ;
- простота реверса. Изменение направления движения судна возможно как за счет ВРШ, так за счет электродвигателя, которое производится изменением порядка чередования фаз при одиночной его работе;
- высокое быстродействие в переходных режимах. Постоянная времени силовой электрической части схемы - ППЧ, АБ и валомашины более чем на порядок меньше постоянной времени механической части - ВРШ и ГД. Благодаря этому резко снижается возможность перегрузки дизельного двигателя в переходных режимах, что сохраняет его ресурс.
При этом при распределении мощности между валомашиной и ГД, равном 1:1, при одиночной работе на гребной винт регулируемого шага одного из двигателей максимальная скорость судна составит 0,794 от номинальной. Т.е. при преждевременной разрядке тяговой АБ снижение скорости хода судна будет равно ≈20%.
Заявляемый способ управления судовой КЭУ иллюстрируется на фиг.1, 2, 3.
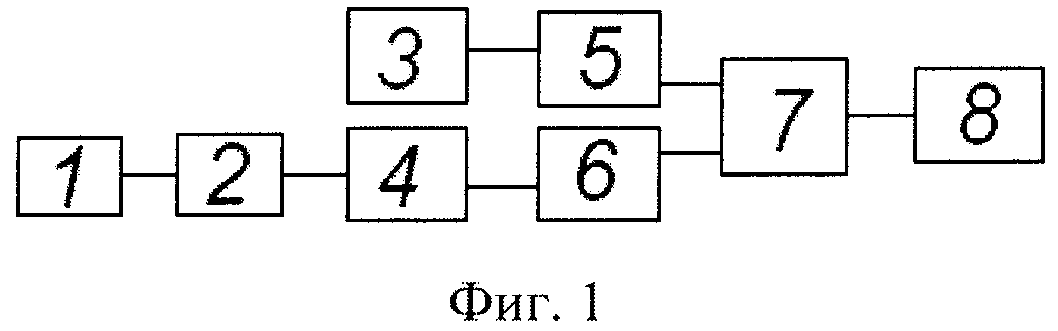
На фиг.1 изображена структурная схема судовой КЭУ.
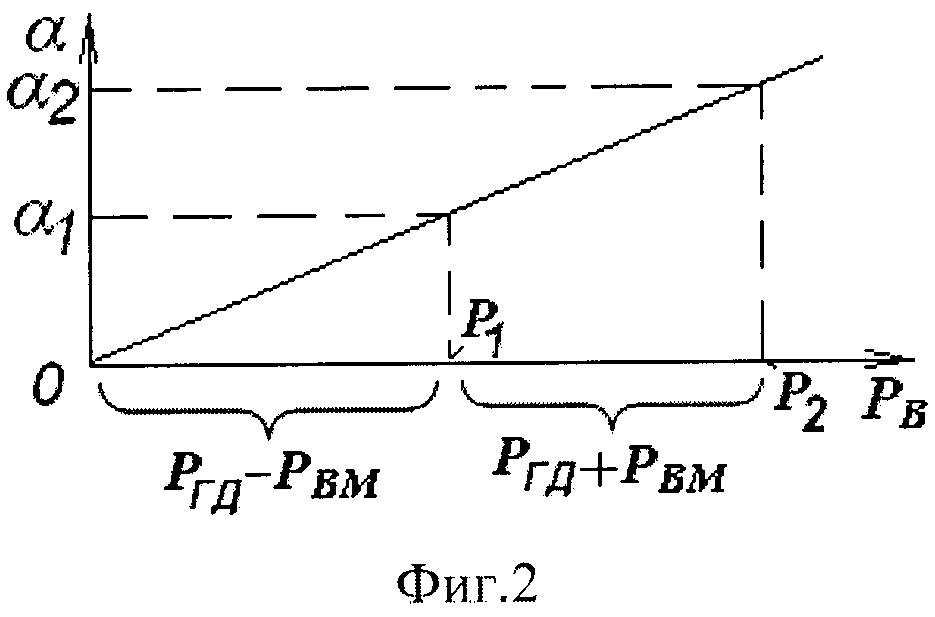
На фиг.2 представлен принцип управления ВРШ в функции мощности на гребном винте.
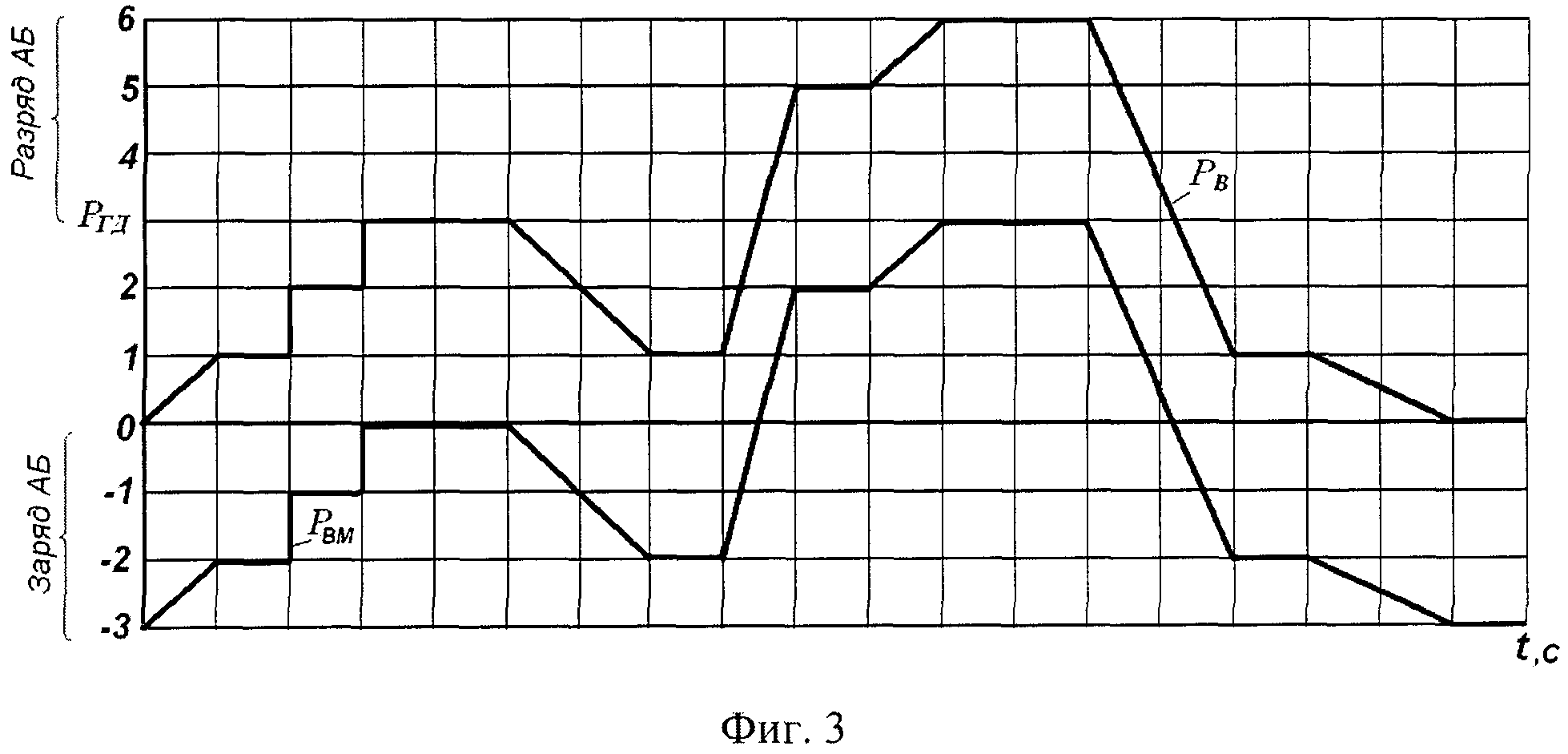
На фиг.3 изображены графики зависимости мощности на винте PВ и мощности валомашины PВМ от времени.
Заявляемый способ поясняется на примере небольших судов прибрежного, внутрипортового плавания, а также речных судов, работающих с частыми маневренными режимами и мощностью на гребном винте до 100…250 кВт, таких как "Паллада-С", "КС-110-32" и им подобных.
Заявленный способ управления судовой КЭУ реализуется посредством блок-схемы, изображенной на фиг.1. Данная схема содержит: 1 - аккумуляторную батарею (АБ); 2 - полупроводниковый преобразователь частоты (ППЧ); 3 - главный двигатель (ГД); 4 - валогенератор - обратимую синхронную машину (ОСМ); 5, 6 - разобщительные муфты соответственно ГД и ОСМ; 7 - суммирующий редуктор; 8 - винт регулируемого шага (ВРШ).
Рабочим органом системы является винт регулируемого шага ВРШ. Передачу вращающего момента к винту осуществляют через суммирующий редуктор 7 и муфты 5 и/или 6. В качестве главного двигателя 3, например, используют двигатель внутреннего сгорания (дизель). В качестве валогенератора 4 - обратимую синхронную машину (ОСМ). Полупроводниковый преобразователь частоты (ППЧ) 2 является двухсторонним и управляется системой управления (не показано).
Аккумуляторную батарею используют такой емкости и напряжения, при которых соответствующая ей зарядная мощность, определяемая из соотношения
P=U·I,
где
P - зарядная мощность аккумуляторной батареи, Вт;
U - среднее зарядное напряжение, В;
I - зарядный ток, А, определяемый из соотношения:
I=K·C,
где
K=0.1…0.3 - коэффициент, зависящий от типа используемой аккумуляторной батареи, 1/ч;
C - емкость аккумуляторной батареи, А·ч,
соизмерима с номинальной мощностью главного двигателя.
Способ управления судовой КЭУ осуществляют следующим образом. Судно (не показано) приводят в движение путем подачи от АБ 1 напряжения на ОСМ 4, работающую в двигательном режиме, разобщительную муфту 5 ГД при этом размыкают, а 6 ОСМ замыкают. Разгон, движение судна, регулирование частоты вращения гребного вала производят посредством ППЧ 2 с его системой управления до тех пор, пока напряжение АБ не уменьшится до некоторого среднего значения. Как только это произойдет, датчик напряжения (ДН) АБ подаст сигнал на систему дистанционного автоматизированного управления (ДАУ) (на схеме не показаны) ГД на его запуск с предварительным подключением его к редуктору 7, приведя разобщительную муфту 5 ГД в замкнутое состояние. С момента соединения ГД с гребным винтом регулируемого шага 8 регулирование его упора производят путем изменения шага ВРШ при постоянной частоте вращения главного двигателя.
Необходимое поддержание момента сопротивления на валу ГД постоянным и равным номинальному при управлении КЭУ производят следующим образом. При моменте сопротивления на гребном винте, меньшем номинального момента главного двигателя, ОСМ посредством системы ДАУ переводят в режим генератора, от которого отбирают посредством ППЧ и его системы управления такое количество электроэнергии, которое необходимо для создания дополнительного тормозного момента, равного разности между номинальным моментом ГД и моментом сопротивления гребного винта. Определение степени загрузки ГД системой ДАУ производится автоматически по показаниям датчиков температуры (ДТ) (не показаны) его выхлопных газов. Вырабатываемый ОСМ в генераторном режиме переменный ток выпрямляется посредством двухстороннего ППЧ с его системой управления и идет в судовую сеть и/или на заряд АБ. Т.о., при малых углах ВРШ, а именно меньших α1 (фиг.2), ОСМ работает в генераторном режиме, а управление энергоустановкой заключается в одновременном согласованном воздействии на шаг гребного винта и на ППЧ. Углом α1 на фиг.2 обозначен угол поворота лопастей ВРШ, соответствующий номинальной нагрузке ГД (P1), углом α2 - максимальный угол ВРШ, соответствующий максимальному его упору; PВМ - мощность валомашины - ОСМ.
Для получения скорости судна больше той, которая соответствует углу ВРШ α1, ОСМ 4 посредством системы ДАУ переводят в двигательный режим, ее разобщительную муфту 6 включают. ППЧ с его системой управления обеспечивает частотное регулирование данного электродвигателя, источником электроэнергии которого служит АБ. Т.о., увеличивая крутящий момент ОСМ и одновременно соответствующим образом шаг гребного винта, обеспечивают рост скорости судна.
Вышеизложенное поясняется фиг.3. Мощность на гребном валу изменяется произвольным образом в зависимости от навигационной обстановки. Вследствие того, что постоянная времени электрической части схемы более чем на порядок меньше постоянной времени механической ее части, кривая мощности валомашины практически повторяет кривую мощности гребного винта, отличаясь от нее на величину, равную номинальной мощности ГД.
При снижении напряжения АБ и/или ее емкости до минимально допустимого значения ее разряд в данном режиме разряда прекращают до тех пор, пока ее напряжение не увеличат посредством подзаряда до среднего значения по мере наличия избыточной мощности ГД. Угол поворота лопастей ВРШ при этом ограничивают углом α1, соответствующим мощности на винте, равной номинальной мощности ГД.
Эксплуатация АБ поясняется на примере кислотных акумуляторов, не является предметом притязаний - сопряжена с газовыделениями водорода из электролита АБ, концентрация которого в воздухе около 3% представляет взрывоопасную смесь. В связи с этим при разрядке при достижении содержания водорода в аккумуляторном трюме (не показано) величины 2.5% включают на вентилирование систему принудительной вытяжной вентиляции (не показана) АБ посредством системы ДАУ по сигналу датчика газоанализатора (не показано).
На период зарядки АБ систему вытяжной вентиляции включают на постоянную работу и выключают с ее окончанием по истечении установленного периода в зависимости от температуры электролита.
Зарядку АБ производят обычно в ночной период при стоянке судна у причала с подачей электроэнергии от береговой сети (не показано), что позволит экономить ресурс ГД судна.
Обычно рабочий режим традиционных пассажирских катеров имеет вид: разгон судна, движение с постоянной скоростью в течение 7-50 мин, движение по инерции и со скоростью менее номинальной, торможение, стоянка 7-15 мин. В течение рабочего дня главному двигателю приходится работать во всех эксплуатационных режимах работы - номинальном, долевом (частичном), режиме холостого хода, переходя с одного на другой несколько раз. Такой непостоянный график работы главного двигателя уменьшает его эксплуатационный ресурс. Неизбежная здесь работа ДВС в холостом режиме и в долевых является неэкономичной и характеризуется увеличенным удельным расходом топлива, большими вредными выбросами в атмосферу. Заявляемый способ управления судовой КЭУ обеспечивает стационарный режим работы ГД при любой скорости судна, что весьма существенно.
Таким путем заявленный способ управления судовой комбинированной энергетической установкой предлагаемого типа может быть использован для судов с мощностью на гребном валу до (100…250) кВт, работающих с частыми маневренными режимами. Достигается технический результат - повышение эффективности использования главного двигателя, уменьшение потребления горюче-смазочных материалов, сокращение вредных выбросов в атмосферу. Применение такой комбинированной схемы с использованием дополнительного источника энергии в виде аккумуляторной батареи позволит в достаточной степени уменьшить мощность теплового двигателя, одновременно обеспечив стационарную работу последнего с номинальными параметрами. Это, в свою очередь, позволяет сократить эксплуатационные расходы и повысить качество и комфортность обслуживающего персонала и пассажиров.
Магнитный тормоз
Электромагнитный молот с приводом от линейного электрического двигателя
Лифт с электроприводом подъема электрическим линейным двигателем
Пьезоэлектрический элемент для установки на гибкой базовой структуре
Способ автоматизированного управления синхронным дизель-генератором

