Результат интеллектуальной деятельности: РУЧНОЙ МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к виброизолирующей конструкции ручки в ручном механизированном инструменте, таком как отбойный молоток и перфоратор, который приводит в действие инструментальную насадку, заставляя ее совершать возвратно-поступательные перемещения в постоянном цикле.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В соответствии с известным ручным механизированным инструментом, таким как отбойный молоток с виброизолирующей ручкой, эта ручка связана с корпусом механизированного инструмента через эластичную резину, чтобы снизить передачу вибрации от корпуса механизированного инструмента к ручке. Например, не прошедшая экспертизу опубликованная японская заявка на патент №58-34271 раскрывает сущность такого механизированного инструмента. Эластичная ручка имеет более низкую прочность на сдвиг по сравнению с прочностью на сжатие. То есть она имеет такое свойство, при котором больший эффект уменьшения вибрации может быть получен деформацией на сдвиг, чем деформацией на сжатие. В вышеупомянутом известном механизированном инструменте передача вибрации от корпуса механизированного инструмента к ручке уменьшается в продольном направлении корпуса механизированного инструмента (горизонтальное направление) и в вертикальном направлении, поперечном этому продольному направлению, использованием механизма гашения вибрации, обусловленного деформацией сдвига резины.
Однако в соответствии с такой известной виброизолирующей конструкцией направление сдвига эластичного элемента ограничено продольным направлением корпуса механизированного инструмента или горизонтальным направлением и вертикальным направлением, поперечным этому продольному направлению, так что эффективность уменьшения вибрации в других направлениях низка. Поэтому в этом отношении желательно дальнейшее улучшение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно, задачей настоящего изобретения является улучшение снижения вибрации ручки в ручном механизированном инструменте.
Чтобы решить вышеописанную проблему в предпочтительном варианте исполнения в соответствии с настоящим изобретением ручной механизированный инструмент производит предопределенную операцию над обрабатываемым элементом выполнением линейного перемещения инструментальной насадки в осевом направлении инструментальной насадки. Механизированный инструмент включает в себя корпус механизированного инструмента, имеющий концевую область, к которой может крепиться инструментальная насадка, ручку, которая расположена в задней части корпуса механизированного инструмента со стороны, противоположной инструментальной насадке, предназначенную для захвата ее пользователем, эластичный элемент, расположенный между корпусом механизированного инструмента и ручкой и служащий для уменьшения передачи вибрации от корпуса механизированного инструмента к ручке, приемную часть со стороны корпуса, которая выполнена на корпусе механизированного инструмента и поддерживает эластичный элемент, и приемную часть со стороны ручки, которая выполнена на ручке и поддерживает эластичный элемент. В настоящем изобретении "ручной механизированный инструмент" означает ударный инструмент, такой как отбойный молоток и перфоратор, который выполняет ударную операцию или операцию перфорационного сверления обрабатываемого элемента только ударным движением инструментальной насадки в его осевом направлении или ударными движением и вращением инструментальной насадки.
В добавление к ударному инструменту, это понятие, однако, широко включает в себя режущий механизированный инструмент, такой как ножовочный инструмент и лобзик, который выполняет режущую операцию обрабатываемого элемента возвратно-поступательными перемещениями пильного полотна. "Эластичный элемент" в настоящем изобретении, как правило, означает резину. Далее способ "удержания" эластичного элемента в настоящем изобретении, соответственно, включает в себя способ, которым приемная часть со стороны корпуса и приемная часть со стороны ручки присоединены к эластичному элементу, например, связующим веществом, способ, которым приемные части удерживают эластичный элемент силой трения по контактным поверхностям, и способ, которым эластичный элемент удерживается вводом в контактные углубления, выполненные в приемных частях.
В соответствии с предпочтительным вариантом исполнения ручного механизированного инструмента в настоящем изобретении виброизолирующая часть образована эластичным элементом и приемными частями со стороны корпуса и со стороны ручки, которые расположены напротив друг друга таким образом, чтобы удерживать эластичный элемент. Дополнительно, виброизолирующая часть выполнена таким образом, что деформация эластичного элемента проявляется в виде деформации сдвига в каждом из направлений - по оси Z, определенной вдоль осевого направления инструментальной насадки, и по направлениям оси Y и оси Х, которые пересекаются с осью Z. В настоящем изобретении "деформация сдвига" просто необходимо должна быть включена в деформацию эластичного элемента, и поэтому "деформация сдвига", соответственно, включает в себя деформацию, обусловленную только деформацией сдвига, и деформацию, обусловленную деформацией сдвига и деформацией сжатия.
Эластичный элемент имеет более низкую прочность на сдвиг по сравнению с его прочностью на сжатие, так что деформацией на сдвиг может быть получен больший эффект уменьшения вибрации, чем деформацией на сжатие. В настоящем изобретении на основании использования этого свойства эластичного элемента сконструирована виброизолирующая часть, которая соединяет корпус механизированного инструмента и ручку и которая уменьшает передачу деформации корпуса механизированного инструмента этой ручке в трех направлениях осей X, Y и Z, которые пересекаются одна с другой, - использованием демпфирующего воздействия, вызванного деформацией на сдвиг эластичного элемента. На основании такой конструкции может быть создан ручной механизированный инструмент, в котором может быть реализовано уменьшение вибрации ручки деформацией на сдвиг эластичного элемента в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению ручка содержит основную ручку, которая расположена в задней части механизированного инструмента на стороне, противоположной инструментальной насадке. В соответствии с этим изобретением уменьшение вибрации основной ручки может быть реализовано деформацией на сдвиг эластичного элемента в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению ручка содержит дополнительную ручку, которая прикреплена к передней части корпуса механизированного инструмента. "Дополнительная ручка" в настоящем изобретении предпочтительно выполнена с возможностью ее удаления с корпуса механизированного инструмента. В соответствии с настоящим изобретением уменьшение вибрации дополнительной ручки с использованием деформации на сдвиг эластичного элемента может быть реализовано в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению эластичный элемент расположен в виброизолирующей части между приемной частью со стороны корпуса и приемной частью со стороны ручки, если смотреть из любого места в направлении осей Х, Y и Z. При такой конструкции в соответствии с настоящим изобретением использованием деформации на сдвиг эластичного элемента может быть уменьшена передача вибрации от корпуса механизированного инструмента к основной ручке или к дополнительной ручке.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению основная ручка или дополнительная ручка соединена с корпусом механизированного инструмента по меньшей мере двумя виброизолирующими частями. В каждой из виброизолирующих частей приемная часть со стороны корпуса и приемная часть со стороны ручки имеют соответствующие смежные поверхности, которые расположены напротив друг друга через эластичный элемент. Дополнительно, в каждой из виброизолирующих частей направление нормали к смежной поверхности приемной части со стороны ручки совпадает с направлением нормали к смежной поверхности приемной части со стороны корпуса. Направление нормали к смежной поверхности приемной части со стороны ручки и смежной поверхности приемной части со стороны корпуса в одной из виброизолирующих частей отлично от направления нормали к смежной поверхности приемной части со стороны ручки и смежной поверхности приемной части со стороны корпуса в другой виброизолирующей части. Короче, основная ручка или дополнительная ручка соединена с корпусом механизированного инструмента по меньшей мере двумя виброизолирующими частями, и направление нормали к противоположным смежным поверхностям приемной части со стороны ручки и приемной части со стороны корпуса в одной из виброизолирующих частей отлично от направления такой же нормали в другой виброизолирующей части. "Смежная поверхность" в настоящем изобретении обычно включает в себя прямую наклонную поверхность.
В соответствии с настоящим изобретением в конструкции, в которой направление нормали к смежным поверхностям приемной части со стороны ручки и приемной части со стороны корпуса в одной из виброизолирующих частей отлично от направления такой же нормали в другой виброизолирующей части, использованием деформации на сдвиг эластичного элемента может быть достигнут эффект уменьшения вибрации, прошедшей в основную ручку или в дополнительную ручку по направлениям осей Y и Х.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению приемная часть со стороны корпуса и приемная часть со стороны ручки в виброизолирующей части имеют соответствующие смежные поверхности, которые расположены напротив друг друга через эластичный элемент. Дополнительно, каждая из смежных поверхностей приемных частей со стороны ручки и со стороны корпуса имеет наклонную поверхность, образованную таким образом, что направление нормали к смежным поверхностям ортогонально пересекается с осью Z и наклонно пересекается с осями Y и X.
В соответствии с настоящим изобретением расстояние между опорными точками приемных частей со стороны ручки и со стороны корпуса относительно эластичного элемента или расстояние между точками приложения сдвигающих сил приемных частей со стороны ручки и со стороны корпуса по отношению к эластичному элементу в направлении оси Z может быть сделано большим, чем по другим направлениям - по осям Y и X. Более конкретно, деформация сдвига в направлении оси Z может быть "создана" большей, чем по направлениям осей Y и X. Поэтому эффект уменьшения вибрации с помощью эластичного элемента в направлении оси Z, по которой уменьшение вибрации настоятельно необходимо, может быть увеличен.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по этому изобретению основная ручка или дополнительная ручка продолжается в вертикальном направлении вдоль оси Y и соединена с корпусом механизированного инструмента в верхней и в нижней точках в направлении ее продолжения по правой и левой сторонам относительно оси Y посредством виброизолирующих частей. Приемная часть со стороны ручки и приемная часть со стороны корпуса в каждой из виброизолирующих частей имеют соответствующие смежные поверхности, которые расположены напротив друг друга через эластичный элемент. Дополнительно, направления нормалей к смежным поверхностям приемных частей со стороны ручки и со стороны корпуса верхней и нижней, правой и левой виброизолирующих частей являются симметричными относительно оси Х и оси Y.
В соответствии с настоящим изобретением, как описано выше, в конструкции, в которой основная ручка или дополнительная ручка соединена с корпусом механизированного инструмента через четыре - верхнюю и нижнюю, правую и левую симметрично расположенные виброизолирующие части, использованием деформации на сдвиг эластичного элемента эффект уменьшения вибрации может быть надежно достигнут в вертикальном и в боковом направлениях.
В предпочтительном варианте исполнения в соответствии с настоящим изобретением предложена дополнительная ручка для использования с ручным механизированным инструментом, который инструментальной насадкой выполняет предопределенную операцию с обрабатываемым элементом. Дополнительная ручка включает в себя корпус ручки, прикрепленный с возможностью ее удаления к корпусу механизированного инструмента, захватываемую часть, которая соединена с корпусом ручки и предназначенную для захвата ее пользователем, эластичный элемент, который расположен между корпусом ручки и захватываемой частью и служит для уменьшения передачи вибрации от корпуса ручки к захватываемой части, приемную часть со стороны корпуса, которая выполнена на ручке и поддерживает эластичный элемент, и приемную часть со стороны захвата, которая выполнена на захватываемой части и поддерживает эластичный элемент. Виброизолирующая часть образована эластичным элементом и приемными частями со стороны корпуса и со стороны захвата, которые расположены напротив друг друга таким образом, чтобы удерживать этот эластичный элемент. Дополнительно, виброизолирующая часть выполнена таким образом, что деформация эластичного элемента проявляется в виде деформации сдвига в каждом из направлений - по оси Z, определенной вдоль продольного направления корпуса механизированного инструмента, и по направлениям оси Y и оси Х, которые пересекаются с осью Z.
В настоящем изобретении "деформация сдвига" просто необходимо должна быть включена в деформацию эластичного элемента, и поэтому "деформация сдвига" соответственно включает в себя деформацию, обусловленную только деформацией сдвига, и деформацию, обусловленную деформацией сдвига и деформацией сжатия.
Эластичный элемент имеет более низкую прочность на сдвиг по сравнению с его прочностью на сжатие, так что деформацией на сдвиг может быть получен больший эффект уменьшения вибрации, чем деформацией на сжатие. В соответствии с дополнительной ручкой по настоящему изобретению на основании использования этого свойства эластичного элемента сконструирована виброизолирующая часть, которая соединяет корпус ручки и захватываемую часть для уменьшения передачи вибрации от корпуса ручки к захватываемой части в трех направлениях осей X, Y и Z, которые пересекаются одна с другой, - использованием демпфирующего воздействия, вызванного деформацией на сдвиг эластичного элемента. Имея такую конструкцию, может быть предложена дополнительная ручка, в которой может быть достигнуто уменьшение вибрации захватываемой части деформацией на сдвиг эластичного элемента в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения дополнительной ручки в этом изобретении захватываемая часть соединена по обоим концам в продольном направлении захватываемой части с корпусом ручки через два плеча, которые продолжаются параллельно друг другу в направлении, поперечном продольному направлению захватываемой части. Более конкретно, дополнительная ручка по этому изобретению сконфигурирована как D-образная ручка. Способ выполнения "плеч" в настоящем изобретении, соответственно, включает в себя вариант выполнения плеч на стороне захватываемой части и вариант выполнения плеч на стороне корпуса ручки. В конструкции, в которой плечи выполнены на стороне корпуса ручки, виброизолирующая часть расположена между плечами и захватываемой частью, в то время как в конструкции, в которой плечи выполнены на стороне захватываемой части, виброизолирующая часть расположена между плечами и корпусом ручки. Кроме того, вариант продолжения плеч "параллельно", соответственно, включает в себя вариант вообще параллельного продолжения плеч. В соответствии с настоящим изобретением может быть реализовано уменьшение вибрации захватываемой части дополнительной D-образной ручки деформацией на сдвиг эластичного элемента в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения дополнительной ручки в этом изобретении один конец захватываемой части в продольном направлении соединен с корпусом ручки, а другой конец свободен. Более точно, дополнительная ручка в этом изобретении сконфигурирована как стержнеобразная ручка. В соответствии с настоящим изобретением может быть реализовано уменьшение вибрации захватываемой части дополнительной стержнеобразной ручки деформацией на сдвиг эластичного элемента в трех направлениях осей X, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по настоящему изобретению виброизолирующая часть включает в себя механизм предотвращения вращения, который дает возможность по меньшей мере одной из ручек - основной ручке или дополнительной ручке перемещаться относительно корпуса механизированного инструмента в направлениях осей X, Y и Z под действием деформации эластичного элемента и предотвращает ее вращение на оси Y.
В конструкции, в которой основная ручка или дополнительная ручка может вращаться во всех направлениях (осей X, Y и Z) через виброизолирующую часть, когда во время работы на основную ручку или дополнительную ручку воздействует сила вращения вокруг ее продольного направления или по оси Y, основная ручка или дополнительная ручка может поворачиваться по оси Y относительно корпуса механизированного инструмента. Если это происходит, работа становится тяжелой. Однако в соответствии с настоящим изобретением механизм предотвращения вращения может предотвратить вращение по меньшей мере одной из ручек - основной ручки или дополнительной ручки по оси Y относительно корпуса механизированного инструмента, что может повысить удобство работы.
В соответствии со следующим вариантом исполнения ручного механизированного инструмента по настоящему изобретению механизм предотвращения вращения содержит особый эластичный элемент, который отличен от упомянутого эластичного элемента и расположен таким образом, что соединяет корпус механизированного инструмента и, по меньшей мере, одну из ручек - основную ручку или дополнительную ручку. В настоящем изобретении выражение "особый эластичный элемент", как правило, означает торсионный стержень. В соответствии с настоящим изобретением дополнительным вводом отличного эластичного элемента можно легко получить механизм предотвращения вращения.
В соответствии со следующим вариантом исполнения дополнительной ручки в этом изобретении виброизолирующая часть включает в себя механизм предотвращения вращения, который дает возможность захватываемой части перемещаться относительно корпуса ручки в направлениях осей X, Y и Z под действием деформации эластичного элемента и предотвращает ее вращение на оси Y.
В конструкции, в которой захватываемая часть дополнительной ручки может вращаться во всех направлениях (осей X, Y и Z) через виброизолирующую часть, когда во время работы ручного механизированного инструмента на захватываемую часть воздействует сила вращения вокруг ее продольного направления или по оси Y, захватываемая часть может поворачиваться по оси Y относительно корпуса ручки. Если это происходит, работа становится тяжелой. Однако в соответствии с настоящим изобретением механизм предотвращения вращения может предотвратить вращение захватываемой части по оси Y относительно корпуса ручки, что может повысить удобство работы.
В соответствии со следующим вариантом исполнения дополнительной ручки в этом изобретении механизм предотвращения вращения содержит особый эластичный элемент, который отличен от упомянутого эластичного элемента и расположен таким образом, что связывает захватываемую часть и корпус ручки. В настоящем изобретении выражение "особый эластичный элемент" типично означает торсионный стержень. В соответствии с настоящим изобретением дополнительным вводом особого эластичного элемента можно легко получить механизм предотвращения вращения.
В соответствии с настоящим изобретением, предложено техническое решение, которое способствует дальнейшему повышению эффекта уменьшения вибрации в ручном механизированном инструменте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой сечение, показывающее весь электрический перфоратор в соответствии с первым вариантом исполнения настоящего изобретения.
Фиг.2 представляет собой вид в перспективе, показывающий ручку и закрывающий элемент, которые не собраны вместе.
Фиг.3 представляет собой вид в перспективе, показывающий ручку и закрывающий элемент, которые собраны вместе.
Фиг.4 представляет собой боковой вид, показывающий ручку и закрывающий элемент, которые собраны вместе.
Фиг.5 представляет собой сечение, выполненное по линии А-А на фиг.4.
Фиг.6 представляет собой сечение, выполненное по линии В-В на фиг.5.
Фиг.7 представляет собой сечение, выполненное по линии С-С на фиг.4.
Фиг.8 представляет собой вертикальное сечение, показывающее D-образную ручку в соответствии со вторым вариантом исполнения настоящего изобретения.
Фиг.9 представляет собой сечение, выполненное по линии D-D на фиг.8.
Фиг.10 представляет собой вертикальное сечение, показывающее D-образную ручку в соответствии с третьим вариантом исполнения настоящего изобретения.
Фиг.11 представляет собой сечение, выполненное по линии Е-Е на фиг.10.
Фиг.12 представляет собой вид в перспективе, показывающий ручку и дополнительную ручку в виде стержня в соответствии с четвертым вариантом исполнения настоящего изобретения.
Фиг.13 представляет собой вертикальное сечение дополнительной ручки.
Фиг.14 представляет собой вертикальное сечение, показывающее D-образную ручку в соответствии с пятым вариантом исполнения настоящего изобретения.
Фиг.15 представляет собой сечение, выполненное по линии F-F на фиг.14.
Фиг.16 представляет собой вид в перспективе, показывающий ручку и дополнительную D-образную ручку в соответствии с шестым вариантом исполнения настоящего изобретения.
Фиг.17 представляет собой вид сбоку на дополнительную D-образную ручку.
Фиг.18 представляет собой сечение, выполненное по линии G-G на фиг.17.
Фиг.19 представляет собой вид в перспективе, показывающий ручку и дополнительную D-образную ручку в соответствии с седьмым вариантом исполнения настоящего изобретения.
Фиг.20 представляет собой вид сбоку на дополнительную D-образную ручку.
Фиг.21 представляет собой сечение, выполненное по линии Н-Н на фиг.20.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ИСПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Первый вариант исполнения настоящего изобретения
Теперь будет описан первый вариант исполнения настоящего изобретения со ссылками на чертежи. Фиг.1 представляет собой сечение, показывающее весь электрический перфоратор 101 как иллюстративный пример ручного механизированного инструмента в соответствии с настоящим изобретением. Как показано на фиг.1, перфоратор 101 данного варианта исполнения включает в себя корпус 103, который образует внешнюю оболочку перфоратора 101, ударную насадку 119, съемно крепящуюся к концевой области (с левой стороны, как показано на фиг.1) корпуса 103 посредством инструментального патрона 137, и ручной захват 109, который связан с корпусом 103 на стороне, противоположной относительно ударной насадки 119, и предназначенный для захвата его пользователем. Корпус 103 и ударная насадка 119 являются элементами, которые отвечают, соответственно, терминам "корпус механизированного инструмента" и "инструментальная насадка" в соответствии с настоящим изобретением, а ручной захват 109 является элементом, который отвечает терминам "ручка" и "основная ручка" в соответствии с настоящим изобретением. Ударная насадка 119 удерживается инструментальным патроном 137 таким образом, что имеет возможность совершать возвратно-поступательные перемещения относительно инструментального патрона 137 в направлении своей оси и не имеет возможности совершать вращение относительно инструментального патрона 137 в своем окружном направлении. В настоящем варианте исполнения для удобства объяснения сторона ударной насадки 119 будет рассматриваться как передняя, а сторона ручного захвата 109 - как задняя.
Корпус 103 включает в себя отсек 105 электродвигателя, который содержит в себе приводной электродвигатель 111, и отсек 107 редуктора, который содержит в себе механизм 113 преобразования перемещения, ударный механизм 115 и механизм 117 передачи энергии. Выход вращения приводного электродвигателя 111 механизмом 113 преобразования перемещения соответствующим образом преобразовывается в линейное перемещение и затем передается на ударный механизм 115. В результате в осевом направлении ударной насадки 119 через ударный механизм 115 генерируется сила удара. Кроме того, на выходе скорость вращения приводного электродвигателя 111 механизмом 117 передачи мощности соответствующим образом уменьшается и затем передается на ударную насадку 119. В результате ударная насадка 119 получает вращение в окружном направлении.
Механизм 113 преобразования перемещения включает в себя, главным образом, кривошипный механизм. Кривошипный механизм сконструирован таким образом, что когда кривошипный механизм приводится во вращение приводным электродвигателем 111, приводной элемент в форме поршня 129, образующий последний подвижный элемент кривошипного механизма, перемещается линейно в направлении оси ударной насадки. Механизм 117 передачи энергии включает в себя, главным образом, шестеренчатый механизм понижения скорости, образованный множеством шестерен, и служит для передачи вращательного усилия приводного электродвигателя 111 на инструментальный патрон 137. Таким образом, инструментальный патрон 137 приводится во вращение в вертикальной плоскости, а ударная насадка 119, удерживаемая инструментальным патроном 137, вращается.
Ударный механизм 115 включает в себя, главным образом, ударный элемент в форме ударника 143, который расположен с возможностью скольжения в выточенном отверстии цилиндра 141, и промежуточный элемент в форме ударного стержня 145, который расположен с возможностью скольжения в инструментальном патроне 137. Ударник 143 приводится в действие воздействием воздушной пружины воздушной камеры 141а цилиндра 141, которое вызывается скользящим перемещением поршня 129. Ударник 143 при этом сталкивается с ударным стержнем 145 (ударяется в него) и через этот ударный стержень 145 передает ударное усилие ударной насадке 119.
В сконструированном таким образом перфораторе 101 во время работы приводного электродвигателя 111 к ударной насадке 119 в осевом направлении через ударный механизм 115 от механизма 113 преобразования перемещения прикладывается сформированное кривошипным механизмом ударное усилие и в то же время к ударной насадке 119 в окружном направлении через механизм 117 передачи энергии, образованный шестеренчатым механизмом понижения скорости, прикладывается также и вращательная сила. Таким образом, ударная насадка 119 выполняет операцию сверления в обрабатываемом элементе (в бетоне) ударными движениями в осевом направлении и сверлильными движениями в окружном направлении.
Перфоратор 101 может соответствующим образом переключаться между режимом ударных операций, в котором к ударной насадке 119 прикладывается только ударное усилие в осевом направлении, и режимом операций перфоратора, в котором к ударной насадке 119 прикладывается и ударное усилие в осевом направлении, и вращательная сила в окружном направлении. Эта конструкция не имеет непосредственного отношения к настоящему изобретению, а потому описываться не будет.
Во время работы перфоратора 101 в корпусе 103 вследствие движений ударной насадки 119 возникает вибрация. Основная вибрация при этом возникает в осевом направлении ударной насадки 119. Для того чтобы уменьшить передачу вибрации от корпуса 103 к ручному захвату 109, этот ручной захват 109 связан с задним концом корпуса 103 через виброизолирующую часть 159. Далее будет описана соединительная конструкция ручного захвата 109 со ссылками на фиг.2-8. В нижеследующем описании ось Z направлена вдоль осевого направления ударной насадки 119 или вдоль продольного направления корпуса механизированного инструмента, ось Y направлена вдоль вертикального направления поперечно относительно оси Z, а ось Х вдоль горизонтального направления поперечно относительно оси Z или в боковом направлении к корпусу механизированного инструмента.
Ручной захват 109 связан с закрывающим элементом 151, который закрывает заднюю часть (с правого конца на фиг.1) корпуса 103 через виброизолирующую часть 159 для уменьшения вибрации. Таким образом, образован узел ручного захвата, имеющий ручной захват 109 и закрывающий элемент 151. Виброизолирующая часть 159 является признаком, который соответствует термину "виброизолирующая часть" в соответствии с настоящим изобретением. Как показано на фиг.1 и 3, собранный (связанный) закрывающий элемент 151 расположен в задней части корпуса 103 и прикреплен к корпусу 107 редуктора и корпусу 105 электродвигателя, которые являются компонентами корпуса 103, винтами (не показаны) в нескольких предопределенных точках. То есть закрывающий элемент 151 является элементом со стороны корпуса, который окончательно скреплен с корпусом 103. Фиг.2 показывает ручной захват 109 и закрывающий элемент 151, которые не собраны вместе, а фиг.3 и 4 показывают ручной захват 109 и закрывающий элемент 151, которые собраны (связаны) вместе. Ручной захват 109 и закрывающий элемент 151 образуют замкнутую D-образную ручку.
Как показано на фиг.2, закрывающий элемент 151 продолжается в направлении оси Y и имеет резиновые опоры 153, которые выполнены по его продолжающимся верхнему и нижнему концам. Каждая из резиновых опор 153 служит для удержания эластичных резинок 152 с целью уменьшения вибрации. Эластичные резинки 152 и резиновые опоры 153 закрывающих элементов 151 являются признаками, которые отвечают соответственно понятиям "эластичный элемент" и "приемная часть со стороны корпуса" в соответствии с настоящим изобретением.
Ручной захват 109 при взгляде сбоку обычно имеет U-образную форму и включает в себя захватываемую часть 155, продолжающуюся в направлении оси Y, и резиновые опоры 157, которые выполнены по продолжающимся верхнему и нижнему концам захватываемой части 155 и удерживают эластичные резинки 152. Резиновые опоры 157 ручного захвата 109 являются признаками, которые отвечают понятию "приемная часть со стороны ручки" в соответствии с настоящим изобретением.
Резиновые опоры 153 с закрывающей стороны и резиновые опоры 157 со стороны захвата связаны друг с другом через эластичные резинки 152. Таким образом, ручной захват 109 имеет возможность перемещения относительно закрывающего элемента 151 при эластичной деформации эластичных резинок 152. В этом варианте исполнения всего имеется четыре - верхняя и нижняя, правая и левая - виброизолирующие части 159, включающие в себя четыре эластичные резинки 152, а также резиновые опоры 153 и 157 - с закрывающей стороны и со стороны захвата - для удержания эластичных резинок.
В этом варианте исполнения, когда ручной захват 109 перемещается относительно закрывающего элемента 151, эластичная деформация эластичных резинок 152 виброизолирующих частей 159 включает в себя деформацию сдвига в каждом из направлений осей Х, Y и Z, которые пересекаются друг с другом. Более конкретно, он сконструирован таким образом, что передача вибрации со стороны корпуса 103 к ручному захвату 109 может быть уменьшена демпфирующим воздействием, вызванным деформацией сдвига эластичных резинок 152.
Далее подробно описывается конструкция предназначенных для этих целей виброизолирующих частей 159. Верхняя и нижняя резиновые опоры 153 с закрывающей стороны выступают на предопределенную длину назад из заднего конца закрывающего элемента 151, верхняя и нижняя резиновые опоры 157 со стороны захвата выступают на предопределенную длину вперед из верхних и нижних концов захватываемой части 155. Вертикальное расстояние между резиновыми опорами 157 со стороны захвата меньше, чем вертикальное расстояние между резиновыми опорами 153 с закрывающей стороны, а резиновые опоры 157 со стороны захвата и резиновые опоры 153 с закрывающей стороны в вертикальном направлении противоположны друг другу. Более конкретно, верхняя и нижняя резиновые опоры 157 со стороны захвата расположены внутри верхней и нижней резиновых опор 153 с закрывающей стороны. Что касается внутреннего и наружного расположения резиновых опор, то они могут быть расположены и наоборот.
Вверху виброизолирующая часть 159, противолежащая смежным поверхностям 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата, обычно имеет V-образную форму, если смотреть по направлению оси Z. Внизу виброизолирующая часть 159, противолежащая смежным поверхностям 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата, если смотреть по направлению оси Z, обычно имеет обратную V-образную форму. Более конкретно, резиновые опоры 153, 157 с закрывающей стороны и со стороны захвата имеют соответствующие смежные поверхности 153а, 157а, противолежащие друг другу через эластичные резинки 152. В верхней и в нижней виброизолирующих частях 159 направление нормали к смежным поверхностям 153а резиновых опор 153 с закрывающей стороны совпадает с направлением нормали к смежным поверхностям резиновых опор 157 со стороны захвата. Дополнительно, каждая из смежных поверхностей 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата в верхней и в нижней виброизолирующих частях 159 имеет прямую наклонную поверхность, сформированную таким образом, что направление нормали к смежным поверхностям 153а, 157а ортогонально пересекает ось Z (см. фиг.6 и 7) и наклонно, под предопределенным углом (например, приблизительно в 45°) пересекает оси Х и Y (см. фиг.5). Дополнительно, смежные поверхности 153а, 157а (наклонные поверхности) резиновых опор 153, 157 с закрывающей стороны и со стороны захвата в виброизолирующих частях 159 выполнены симметрично относительно осей Y и Х.
Дополнительно, смежные поверхности 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата в верхней и в нижней виброизолирующих частях 159 противолежат относительно друг друга с определенным зазором. Обычно в этих смежных поверхностях 153а, 157а выполнены соответствующие контактные полусферические углубления 153b, 157b, и между этими контактными полусферическими углублениями 153b, 157b размещаются и удерживаются шарообразные эластичные резинки 152. С этой целью по меньшей мере одна - резиновая опора 153 с закрывающей стороны или резиновая опора 157 со стороны захвата - выполнена относительно закрывающего элемента 151 или захватываемой части 155 как отдельный элемент и прикреплена к ней винтами или чем-нибудь подобным (не показаны).
Перфоратор 101 в соответствии с данным вариантом исполнения выполнен так, как описано выше. При выполнении операции перфорационного сверления в корпусе 103 возникает импульсная циклическая вибрация, но передача этой вибрации от корпуса 103 в сторону ручного захвата 109 понижена эластичной деформацией или деформацией сдвига - включая деформацию сжатия - эластичных резинок 152 в виброизолирующих частях 159.
В этом варианте исполнения смежные поверхности 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата сформированы таким образом, что направление нормали к смежным поверхностям ортогонально оси Z (то есть направление плоскостей смежных поверхностей 153а, 157а параллельно оси Z). Поэтому, когда вибрация от корпуса 103 передается к ручному захвату 109 в направлении оси Z, резиновая опора 153 с закрывающей стороны и резиновая опора 157 со стороны захвата перемещаются относительно друг от друга в направлении оси Z, и в результате на эластичные резинки 152 через сферические контактные поверхности контактных углублений 153b, 157b воздействует сила, главным образом, в направлении создания деформации сдвига. Более конкретно, когда деформация передается на эластичные резинки 152 в направлении оси Z, эластичная деформация этих эластичных резинок 152 в значительной степени проявляется в виде деформации сдвига (включая частично и деформацию сжатия), и передача вибрации от корпуса 103 к ручному захвату 109 может быть понижена демпфирующим воздействием, вызванным этой деформацией сдвига. Здесь сила в направлении деформации сдвига включает в себя силу в направлении линейного среза или в направлении скручивания.
Таким образом, в соответствии с данным вариантом исполнения он построен таким образом, что эластичная деформация эластичных резинок 152 в значительной степени проявляется в виде деформации сдвига в направлении оси Z или в направлении ударного перемещения ударной насадки 119, в котором настоятельно необходимо уменьшение вибрации. При такой конструкции может быть гарантированно обеспечен эффект уменьшения вибрации ручного захвата 109 в направлении оси Z.
Далее каждая из смежных поверхностей 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата имеет наклонную поверхность, образованную таким образом, что направление нормали к этим смежным поверхностям 153а, 157а пересекается под предопределенным наклонным углом к осям Х и Y. Поэтому, когда вибрация, вызванная в корпусе 103 в направлении оси Y (вертикальное направление) или в направлении оси Х (боковое направление), передается на эластичные резинки 152, резиновая опора 153 с закрывающей стороны и резиновая опора 157 со стороны захвата перемещаются относительно друг от друга в направлении оси Y или оси Х, и в результате на эластичные резинки 152 через сферические контактные поверхности контактных углублений 153b, 157b воздействуют силы в направлении сжатия и в направлении сдвига. Более конкретно, когда деформация передается на эластичные резинки 152 в направлении оси Y или оси Х, деформация этих эластичных резинок 152 проявляется как в виде деформации сжатия, так и в виде деформации сдвига. Эластичные резинки 152 имеют более низкую прочность сдвига по сравнению с прочностью сжатия. Поэтому в направлении осей Y или Х достигается как обусловленный деформацией сдвига эластичных резинок 152 эффект уменьшения вибрации ручного захвата 109, так и обусловленный деформацией сжатия эффект предотвращения колебания ручного захвата 109. Дополнительно вследствие эффекта предотвращения колебания может быть обеспечена рабочая стабильность (работоспособность).
Как описано выше, эластичные резинки 152 имеют более низкую прочность сдвига по сравнению с их прочностью сжатия, так что деформацией сдвига может быть достигнут более высокий эффект уменьшения вибрации, чем деформацией сжатия. В соответствии с этим вариантом исполнения, использованием этого свойства эластичных резинок 152 получена такая конструкция, в которой в эластичных резинках 152 деформация сдвига возникает в трех направлениях осей Х, Y и Z. При такой конструкции эффект уменьшения вибрации ручного захвата 109 использованием деформации сдвига эластичных резинок 152 может быть достигнут по всем трем направлениям осей Х, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
Далее, в соответствии с этим вариантом исполнения, в виброизолирующих частях 159, даже если смотреть с любой стороны, эластичные резинки 152 расположены в направлениях осей Х, Y и Z между резиновыми опорами 153 с закрывающей стороны и резиновыми опорами 157 со стороны захвата. Поэтому передача вибрации от корпуса 103 к ручному захвату 109 деформацией сдвига эластичных резинок 152 может быть разумно уменьшена по всем направлениям осей Х, Y и Z.
В этом варианте исполнения ручной захват 109 связан с корпусом 103 посредством эластичных резинок 152 в четырех точках - верхней и нижней, правой и левой, а смежные поверхности 153а, 157а резиновых опор 153, 157 с закрывающей стороны и со стороны захвата выполнены симметрично относительно осей Y и Х. При такой конструкции может быть достигнут эффект уменьшения вибрации эластичных резинок 152, обеспечивающий стабильность в вертикальном и боковом направлениях.
Второй вариант исполнения изобретения
Теперь со ссылками на фиг.8 и 9 будет описан второй вариант исполнения настоящего изобретения. В перфораторе в соответствии с вышеописанным первым вариантом исполнения в том случае, когда конструкция, в которой ручной захват 109 может перемещаться относительно закрывающего элемента 151 (корпус 103) через виброизолирующие части 159 во всех направлениях (осей Х, Y и Z), если ручной захват 109 подвергается воздействию силы вращения вокруг продольного направления ручного захвата 109 или при работе по оси Y, ручной захват 109 может вращаться относительно закрывающего элемента 151 по оси Y. Если такое случается, то выполняемая операция становится для пользователя трудной. Поэтому во втором варианте исполнения настоящего изобретения для предотвращения такого вращения ручного захвата 109 по оси Y введен торсионный стержень 161. Во всех остальных отношениях этот вариант исполнения представляет собой по существу то же самое, что и вышеописанный первый вариант исполнения. Компонентам, которые по существу идентичны компонентам в первом варианте исполнения, даны такие же ссылочные обозначения, как и в первом варианте исполнения, и они либо не будут описаны вовсе, либо будут описаны коротко. Торсионный стержень 161 представляет собой признак, который в соответствии с настоящим изобретением соответствует определениям "механизм предотвращения вращения" и "специальный эластичный элемент". Фиг.8 представляет собой вертикальное сечение, показывающее D-образную ручку, имеющую ручной захват 109, связанный с закрывающим элементом 151 через нижнюю и верхнюю виброизолирующие части 159, а фиг.9 представляет собой сечение, выполненное по линии D-D на фиг.8.
В этом варианте исполнения торсионный стержень 161 образован изгибом круглого стержня из пружинного материала, в общем случае, в прямоугольную форму и вводом его в нижнюю виброизолирующую часть 159. В нижней поверхности нижней резиновой опоры 153 с закрывающей стороны выполнен установочный паз 153с, который продолжается в боковом направлении (в направлении оси Х), а в задней поверхности нижней резиновой опоры 157 со стороны захвата выполнен установочный паз 157с, который проходит в боковом направлении (в направлении оси Х). Торсионный стержень 161 имеет горизонтально продолжающийся нижний прямой участок 161а и горизонтально продолжающийся верхний прямой участок 161b. Нижний прямой участок 161а вставлен в установочный паз 153с нижней резиновой опоры 153 с закрывающей стороны, а верхний прямой участок 161b вставлен в установочный паз 157с нижней резиновой опоры 157 со стороны захвата. В этом состоянии к нижней поверхности резиновой опоры 153 с закрывающей стороны и к задней поверхности резиновой опоры 157 со стороны захвата прикреплена крышка 163 стержня. То есть торсионный стержень 161 расположен таким образом, что он связывает резиновую опору 153 с закрывающей стороны и резиновую опору 157 со стороны захвата.
Торсионный стержень 161, уложенный вышеописанным образом, может вращаться в продольном направлении корпуса инструмента вокруг нижнего прямого участка 161а, уложенного в установочный паз 153с резиновой опоры 153 с закрывающей стороны. Кроме того, верхний и нижний прямые участки 161а, 161b могут скользить относительно установочных пазов 153с, 157с в направлении продолжения установочных пазов 153с, 157с, а верхний прямой участок 161b может скользить в вертикальном направлении относительно установочного паза 157с резиновой опоры 157 со стороны захвата. Таким образом, торсионный стержень 161 позволяет ручному захвату 109 перемещаться во всех направлениях (в направлениях осей Х, Y и Z) относительно закрывающего элемента 151 через виброизолирующую часть 159.
Дополнительно, верхний и нижний прямые участки 161а, 161b, вставленные в установочные пазы 153с, 157с резиновых опор 153, 157 с закрывающей стороны и со стороны захвата, удерживаются в поверхностном (линейном) контакте с поверхностями стенок установочных пазов 153с, 157с и с поверхностью стенки крышки 163 стержня, так что этот торсионный стержень 161 препятствует вращению ручного захвата 109 по оси Y относительно закрывающего элемента 151.
Поэтому в соответствии с этим вариантом исполнения при работе перфоратора 101, когда ручной захват 109, который связан с закрывающим элементом 151 через виброизолирующую часть 159, подвергается воздействию силы вращения вокруг продольного направления ручного захвата 109 или по оси Y, которое может вызвать эластичную деформацию эластичных резинок 152 и, таким образом, вращение ручного захвата 109, в торсионном стержне 161 возникает сила противодействия этой силе вращения по оси Y. Таким образом, может быть предотвращено относительное вращение ручного захвата 109 по оси Y. В результате, вредное относительное перемещение между ручным захватом 109 и корпусом 103 может быть предотвращено, что может повысить работоспособность.
Третий вариант исполнения изобретения
Теперь со ссылками на фиг.10 и 11 будет описан третий вариант исполнения настоящего изобретения. Этот вариант исполнения представляет собой модификацию торсионного стержня 161 по второму варианту исполнения. Фиг.10 представляет собой вертикальное сечение, показывающее D-образную ручку, имеющую ручной захват 109, связанный с закрывающим элементом 151 через верхнюю и нижнюю виброизолирующие части 159, а фиг.11 представляет собой сечение, выполненное по линии Е-Е фиг.10.
В данной модификации торсионный стержень 161 образован изгибом круглого стержня из пружинного материала в общем случае в U-образную форму. Торсионный стержень 161 имеет горизонтально продолжающийся нижний прямой участок 161а, а также правый и левый вертикальные участки 161с, продолжающиеся прямо вверх от концов нижнего прямого участка 161а. Нижний прямой участок 161а уложен в установочный паз 153с резиновой опоры 153 с закрывающей стороны, а правый и левый вертикальные участки 161с уложены в правый и в левый вертикально продолжающиеся установочные пазы 157d, которые выполнены в резиновой опоре 157 со стороны захвата. Остальные элементы конструкции, такие как конструкция, которая позволяет торсионному стержню 161 перемещаться во всех направлениях (в направлениях осей Х, Y и Z) относительно закрывающего элемента 151 через виброизолирующие части 159, и конструкция, в которой торсионный стержень 161 удерживается крышкой 163 стержня, являются по существу идентичными аналогичным элементам второго варианта исполнения.
Поэтому в соответствии с этим вариантом исполнения, как и во втором варианте исполнения, при работе перфоратора 101 торсионный стержень 161 препятствует вращению ручного захвата 109 по оси Y относительно закрывающего элемента 151, так что работоспособность может быть повышена.
Далее, во втором и в третьем вариантах исполнения конструкция, в которой ручной захват 109 связан с закрывающим элементом 151 через верхнюю и нижнюю виброизолирующие части 159, и конструкция, в которой торсионный стержень 161 препятствует вращению ручного захвата 109 по оси Y, описаны применительно к D-образной основной ручке, смонтированной в задней части корпуса 103, но они могут быть применимы не только к D-образной основной ручке, но и к дополнительной D-образной ручке, смонтированной в передней части корпуса 103. В случае с дополнительной ручкой эта дополнительная ручка устанавливается с возможностью ее удаления в передней части корпуса 103 или, более конкретно, как показано на фиг.1, в том месте корпуса 103, в котором находится ударный стержень 145, или на окружную часть цилиндра 103а. Поэтому закрывающий элемент 151 сконфигурирован с возможностью его установки на цилиндр 103а с использованием известного средства крепления. Закрывающий элемент 151, выполненный в дополнительной D-образной ручке, представляет собой признак, который соответствует терминам "корпус механизированного инструмента" и "корпус ручки" по заявленному изобретению. Таким же образом ручной захват 109 является признаком, который соответствует термину "захватываемая часть" по заявленному изобретению.
Далее во втором и в третьем вариантах исполнения торсионный стержень 161 выполнен в нижней виброизолирующей части 159, но он может быть выполнен в верхней и в нижней виброизолирующих частях 159, или же он может быть выполнен только в верхней виброизолирующей части 159. Дополнительно форма торсионного стержня 161 не ограничивается прямоугольной формой или U-образной формой, как это показано, он может иметь другие формы, например Н-образную форму.
Четвертый вариант исполнения настоящего изобретения
Теперь со ссылками на фиг.12 и 13 будет описан четвертый вариант исполнения настоящего изобретения. Этот вариант исполнения относится к дополнительной ручке в форме стержня 171, которая установлена на корпусе 103 с возможностью ее удаления. Фиг.12 представляет собой вид в перспективе, показывающий дополнительную ручку 171, а фиг.13 представляет собой вертикальное сечение дополнительной ручки. Дополнительная ручка в форме стержня 171 включает в себя, в основном, корпус 172 ручки, который установлен на цилиндре 103а (см. фиг.1) с возможностью его удаления, а также захватываемую часть 176, которая связана с корпусом 172 ручки через виброизолирующую часть 177. Корпус 172 ручки установлен с возможностью его удаления на цилиндре 103а с помощью средства установки ручки, которое включает в себя установочный элемент 173, который принимает нижнюю окружную часть цилиндра 103а, стягивающую ленту 174, которая прижимает книзу верхнюю окружную часть цилиндра 103а, и винтовой элемент 175 для натяжения и ослабления стягивающей ленты 174 через цилиндр 103а. Средство установки ручки непосредственно не связано с настоящим изобретением и поэтому в дальнейших деталях не описывается. Корпус 172 ручки является признаком, который соответствует термину "корпус механизированного инструмента" по заявленному изобретению.
Захватываемая часть 176 обычно является цилиндрическим элементом, продолжающимся прямо в вертикальном направлении (в направлении оси Y). Один конец (верхний конец) захватываемой части 176 в своем продольном направлении (направление продолжения) соединяется с корпусом 172 ручки через виброизолирующую часть 177 для уменьшения вибрации, а другой конец (нижний конец) является свободным концом.
Виброизолирующая часть 177 включает в себя резиновую опору 178, которая прочно крепится на нижнем конце установочного элемента 173 корпуса 172 ручки, резиновую опору 179, которая противостоит резиновой опоре 178 и которая прочно крепится в своем продольном направлении на одном конце (верхнем конце) захватываемой части 176, а также две эластичные резинки 181, которые удерживаются между двумя резиновыми опорами 178 и 179. Таким образом, захватываемая часть 176 связана с установочным элементом 173 таким образом, что имеет возможность перемещения относительно этого установочного элемента 173 вследствие эластичной деформации эластичных резинок 181. Дополнительно, в этом варианте исполнения всего имеется две - правая и левая - виброизолирующие части 177, включающие в себя две эластичные резинки 181, а также резиновые опоры 178 и 179 по противоположным сторонам по оси Y - со стороны корпуса ручки и со стороны захвата - для удержания эластичных резинок. Резиновая опора 178 со стороны корпуса ручки является признаком, который соответствует определению "приемная часть со стороны корпуса", а резиновая опора 179 со стороны захвата соответствует определениям "приемная часть со стороны ручки" и "приемная часть со стороны захвата", а эластичные резинки 181 соответствуют определению "эластичный элемент" в соответствии с настоящим изобретением.
В этом варианте исполнения, когда захватываемая часть 176 перемещается относительно корпуса 172 ручки, эластичная деформация эластичных резинок 181 в виброизолирующей части 177 включает в себя деформацию сдвига в каждом из направлений осей Х, Y и Z (продольное, вертикальное и боковое направления), которые пересекаются друг с другом. Более конкретно, он сконструирован таким образом, что передача вибрации от корпуса 172 ручки к захватываемой части 176 может быть уменьшена демпфирующим воздействием, вызванным деформацией сдвига эластичных резинок 181.
Далее подробно описывается конструкция предназначенной для этой цели виброизолирующей части 177. В виброизолирующей части 177 смежные поверхности 178а, 179а резиновых опор 178 и 179 со стороны корпуса ручки и со стороны захвата противостоят друг другу в вертикальном направлении, они обычно имеют обратную V-образную форму, если смотреть по оси Z. Более конкретно, резиновые опоры 178 и 179 со стороны корпуса ручки и со стороны захвата имеют соответствующие смежные поверхности 178а, 179а, противостоящие друг другу через эластичные резинки 181. В виброизолирующей части 177 направление нормали к смежной поверхности 178а резиновой опоры 178 со стороны корпуса ручки совпадает с направлением нормали к смежной поверхности 179а резиновой опоры 179 со стороны захвата. Далее в виброизолирующей части 177 каждая из смежных поверхностей 178а, 179а резиновых опор 178 и 179 со стороны корпуса ручки и со стороны захвата имеет прямую наклонную поверхность, образованную таким образом, что нормали к смежным поверхностям 178а, 179а ортогонально пересекают ось Z и наклонно, под предопределенным углом (например, приблизительно в 45°) пересекают оси Х и Y (см. фиг.13). Дополнительно, смежные поверхности 178а, 179а (наклонные поверхности) резиновых опор 178, 179 со стороны корпуса ручки и со стороны захвата в виброизолирующей части 177 выполнены симметрично относительно оси Y.
Дополнительно смежные поверхности 178а, 179а резиновых опор 178, 179 со стороны корпуса ручки и со стороны захвата противолежат относительно друг друга с определенным зазором. Обычно в этих смежных поверхностях 178а, 179а выполнены соответствующие контактные полусферические углубления 178b, 179b, и между этими контактными полусферическими углублениями 178b, 179b размещаются и удерживаются шарообразные эластичные резинки 181.
Дополнительно для предотвращения вращения захватываемой части 176 по оси Y между резиновой опорой 178 со стороны корпуса ручки и резиновой опорой 179 со стороны захвата введен торсионный стержень 161 таким образом, что соединяет их. Соответственно, в районе соединения резиновой опоры 178 со стороны корпуса ручки с корпусом 172 ручки и в районе соединения резиновой опоры 179 со стороны захвата с захватываемой частью 176 выполнены установочные пазы 178с, 179с, которые проходят в боковом направлении (в направлении оси Х). Торсионный стержень 161 образован изгибанием круглого стержня из пружинного материала, в общем случае, в прямоугольную форму, он имеет нижний прямой участок 161а и верхний прямой участок 161b. Торсионный стержень 161 уложен таким образом, что верхний прямой участок 161b вставлен в установочный паз 178с резиновой опоры 178 со стороны корпуса ручки, а нижний прямой участок 161а вставлен в установочный паз 179с резиновой опоры 179 со стороны захвата.
Торсионный стержень 161, уложенный вышеописанным образом, может вращаться вокруг верхнего прямого участка 161b в продольном направлении корпуса инструмента. Кроме того, верхний и нижний прямые участки 161а, 161b могут скользить относительно установочных пазов 178с, 179с в направлении продолжения установочных пазов 178с, 179с, а верхний прямой участок 161b может скользить в вертикальном направлении относительно установочного паза 178с резиновой опоры 178 со стороны корпуса ручки.
Таким образом, торсионный стержень 161 позволяет захватываемой части 176 перемещаться во всех направлениях (в направлениях осей Х, Y и Z) относительно корпуса 172 ручки через виброизолирующую часть 177.
Дополнительно верхний и нижний прямые участки 161а, 161b, вставленные в установочные пазы 178с, 179с резиновых опор 178, 179 со стороны корпуса ручки и со стороны захвата, удерживаются в поверхностном (линейном) контакте с поверхностями стенок установочных пазов 178с, 179с, так что этот торсионный стержень 161 препятствует вращению захватываемой части 176 по оси Y относительно корпуса 172 ручки.
Дополнительная ручка 171 в соответствии с этим вариантом исполнения выполнена так, как описано выше, и установлена для работы на цилиндр 103а перфоратора 101. При выполнении операции перфорационного сверления импульсная циклическая вибрация, возникающая в корпусе 103, идет (передается) из корпуса 103 в захватываемую часть 176 корпуса 172 ручки, но эта передача вибрации понижена эластичной деформацией или деформацией сдвига, включая деформацию сжатия, эластичных резинок 181 в виброизолирующей части 171.
В этом варианте исполнения смежные поверхности 178а, 179а резиновых опор 178, 179 со стороны корпуса ручки и со стороны захвата сформированы таким образом, что направление нормали к смежным поверхностям ортогонально оси Z (то есть направление плоскостей смежных поверхностей 178а, 179а параллельно оси Z). Поэтому когда вибрация от корпуса 103 передается к захватываемой части 176 через корпус 172 ручки в направлении оси Z, резиновая опора 178 со стороны корпуса ручки и резиновая опора 179 со стороны захвата перемещаются относительно друг друга в направлении оси Z, и в результате на эластичные резинки 181 через сферические контактные поверхности контактных углублений 178b, 179b воздействует сила, главным образом, в направлении создания деформации сдвига. Более конкретно, когда деформация передается на эластичные резинки 181 в направлении оси Z, эластичная деформация этих эластичных резинок 181 в значительной степени проявляется в виде деформации сдвига (включая частично и деформацию сжатия), и передача вибрации от корпуса 103 к захватываемой части 176 через корпус 172 ручки может быть уменьшена демпфирующим воздействием на вибрацию, вызванным этой деформацией сдвига. Здесь сила в направлении деформации сдвига включает в себя силу в направлении линейного среза или в направлении скручивания.
Таким образом, в соответствии с данным вариантом исполнения он построен таким образом, что эластичная деформация эластичных резинок 181 в значительной степени проявляется в виде деформации сдвига в направлении оси Z или в направлении ударного перемещения ударной насадки 119, в котором настоятельно необходимо уменьшение вибрации. При такой конструкции может быть гарантированно обеспечен эффект уменьшения вибрации захватываемой части 176 в направлении оси Z.
Далее каждая из смежных поверхностей 178а, 179а резиновых опор 178, 179 со стороны корпуса ручки и со стороны захвата имеет наклонную поверхность, образованную таким образом, что направление нормали к этим смежным поверхностям 178а, 179а пересекается под предопределенным наклонным углом к осям Х и Y. Поэтому когда вибрация, вызванная в корпусе 103 в направлении оси Y (вертикальное направление) или в направлении оси Х (боковое направление), передается на эластичные резинки 181, резиновая опора 178 со стороны корпуса ручки и резиновая опора 179 со стороны захвата перемещаются относительно друг друга в направлении оси Y или оси Х, и в результате на эластичные резинки 181 через сферические контактные поверхности контактных углублений 178b, 179b воздействуют силы в направлении сжатия и в направлении сдвига. Более конкретно, когда деформация передается на эластичные резинки 181 в направлении оси Y или оси Х, деформация этих эластичных резинок 181 проявляется как в виде деформации сжатия, так и в виде деформации сдвига. Эластичные резинки 181 имеют более низкую прочность сдвига по сравнению с прочностью сжатия. Поэтому в направлении осей Y или Х может быть достигнут как обусловленный деформацией сдвига эластичных резинок 181 эффект уменьшения вибрации захватываемой части 176, так и обусловленный деформацией сжатия эффект предотвращения колебания захватываемой части 176. Дополнительно вследствие эффекта предотвращения колебания может быть обеспечена рабочая стабильность (работоспособность).
Как описано выше, эластичные резинки 181 имеют более низкую прочность сдвига по сравнению с их прочностью сжатия, так что деформацией сдвига может быть достигнут более высокий эффект уменьшения вибрации, чем деформацией сжатия. В соответствии с этим вариантом исполнения, используя это свойство эластичных резинок 181, получена такая конструкция, в которой в эластичных резинках 181 деформация сдвига возникает в трех направлениях осей Х, Y и Z. При такой конструкции эффект уменьшения вибрации захватываемой части 176 использованием деформации сдвига эластичных резинок 181 может быть достигнут по всем трем направлениям осей Х, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
Дополнительно в соответствии с этим вариантом исполнения при работе перфоратора 101, когда захватываемая часть 176, которая связана с корпусом 172 ручки через виброизолирующую часть 177, подвергается воздействию силы вращения вокруг продольного направления захватываемой части 176 или по оси Y, которое может вызвать эластичную деформацию эластичных резинок 181 и, таким образом, вращение захватываемой части 176, в торсионном стержне 161 возникает сила противодействия этой силе вращения по оси Y. Таким образом, может быть предотвращено относительное вращение захватываемой части 176 по оси Y. В результате, вредное относительное перемещение между захватываемой частью 176 и корпусом 172 ручки может быть предотвращено, что может повысить работоспособность.
Далее, в соответствии с этим вариантом исполнения, в виброизолирующих частях 159, даже если смотреть с любой стороны, эластичные резинки 152 расположены в направлениях осей Х, Y и Z между резиновыми опорами 153 с закрывающей стороны и резиновыми опорами 157 со стороны захвата. Поэтому передача вибрации от корпуса 103 к ручному захвату 109 деформацией сдвига эластичных резинок 152 может быть разумно понижена по всем направлениям осей Х, Y и Z.
Пятый вариант исполнения изобретения
Теперь со ссылками на фиг.14 и 15 будет описан пятый вариант исполнения настоящего изобретения. Этот вариант исполнения является модификацией четвертого варианта. Фиг.14 представляет собой вертикальное сечение дополнительной ручки 171, а фиг.15 представляет собой сечение, выполненное по линии F-F на фиг.14. Как показано на иллюстрациях, в этом варианте исполнения четыре эластичные резинки 181 расположены по противоположным сторонам по осям Z и Х, а резиновые опоры 178 и 179 со стороны корпуса ручки и со стороны захвата имеют четыре соответствующие смежные поверхности 178а, 179а, противолежащие друг другу. Обычно в этих смежных поверхностях 178а, 179а выполнены контактные полусферические углубления 178b, 179b для удержания эластичных резинок 181. Дополнительно, каждая из смежных поверхностей 178b, 179b имеет наклонную поверхность, сформированную таким образом, что направление нормали к смежным поверхностям 178b, 179b ортогонально пересекает ось Y (так что направление плоскостей смежных поверхностей 178а, 179а параллельно оси Y) и наклонно под предопределенным углом (например, приблизительно в 45°) пересекает оси Х и Z. В остальных аспектах этот вариант имеет ту же конструкцию, что и четвертый вариант исполнения.
Если виброизолирующая конструкция выполнена так, как описано выше, в соответствии с этим вариантом исполнения, то может быть достигнут по существу тот же самый эффект защиты от вибрации, что и в четвертом варианте исполнения.
Шестой вариант исполнения изобретения
Теперь со ссылками на фиг.16-18 будет описан шестой вариант исполнения настоящего изобретения. Этот вариант исполнения относится к дополнительной D-образной ручке 183, которая крепится с возможностью снятия на цилиндре 103а корпуса 103. В дополнительной ручке 183 передача вибрации к захватываемой части 189 и к корпусу 184 ручки понижена в трех направлениях осей Х, Y и Z использованием демпфирующего воздействия на деформацию, вызванного деформацией сдвига эластичных резинок. Фиг.16 представляет собой вид в перспективе, показывающий дополнительную D-образную ручку 183, фиг.17 представляет собой вид сбоку на дополнительную D-образную ручку 183, а фиг.18 представляет собой сечение, выполненное по линии G-G на фиг.17.
Дополнительная D-образная ручка 183 включает в себя, в основном, корпус 184 ручки, который крепится с возможностью снятия на цилиндре 103а корпуса 103 (см. фиг.1), и захватываемую часть 189, которая связана с корпусом 184 ручки через виброизолирующую часть 191. Корпус 184 ручки включает в себя, в основном, установочную часть в виде кольцевого элемента 185, который закреплен на внешней окружной поверхности цилиндра 103а таким образом, что держит цилиндр 103а, соединительную часть в виде верхнего и нижнего плеча 186, которые соединяют кольцевой элемент 185 с захватываемой частью 189, крепежное средство в виде крепежного болта 187 и регулировочной ручки 187а, которая служит для зажима и ослабления кольцевого элемента 185 на цилиндре 103а, а также верхнего и нижнего кулачковых колец 188, которые расположены между кольцевым элементом 185 и плечами 186 и служат для обеспечения возможности регулировки рабочего положения захватываемой части 189.
Кольцевой элемент 185 включает в себя два дуговых полукруглых элемента 185а и образован соединением одного конца каждого из этих дуговых полукруглых элементов 185а с концом другого таким образом, чтобы они могли вращаться относительно друг друга на штифте 185b, который проходит параллельно продольному направлению цилиндра 103а (оси Z). Другие концы (три конца) 185с дуговых полукруглых элементов 185а расположены между кулачковыми кольцами 188 и между концами (цилиндрические основания) 186а плеч 186 таким образом, что оказываются захваченными со стороны направления касательной к кольцевому элементу 185 (направление оси Y). Концы 186а плеч 186, кулачковые кольца 188 и другие концы 185с кольцевого элемента 185, которые расположены, как описано выше, имеют соответствующие отверстия, и крепежный болт 187 свободно вставлен в эти отверстия в направлении оси Y. Крепежный болт 187 на одном конце имеет головку 187b, и эта головка 187b входит в конец 186а одного плеча 186 таким образом, что тем самым определяется максимальное вставленное положение. В этом положении другой конец крепежного болта 187 выступает из конца 186а другого плеча 186, и на выступающий конец крепежного болта 187 навинчена регулировочная ручка 187а. Дополнительно регулировочная ручка 187а касается внешней поверхности конца 186а другого плеча 186.
При вращении регулировочной ручки 187а в одном направлении (направление зажима) крепежный болт 187 регулировочной ручки 187а взаимодействуют таким образом, что крепят два плеча 186, двигая их навстречу друг другу. В результате другие концы 185с кольцевого элемента 185 через кулачковые кольца 188 также движутся в направлении друг друга. Таким образом, кольцевой элемент 185 оказывается закрепленным на цилиндре 103а. Когда регулировочная ручка 187а вращается в другом направлении (направление ослабления), происходит ослабление кольцевого элемента 185 на цилиндре 103а.
По обеим сторонам каждого из двух кулачковых колец 188 (обе концевые поверхности в осевом направлении) образована внешняя поверхность кулачка, обычно имеющая зубчатую V-образную насечку. Поверхности кулачка, обычно имеющие зубчатую V-образную насечку, образованы, соответственно, на внутренней стороне каждого из концов 186а двух плеч 186 и на внешней стороне каждого из других концов 185с кольцевого элемента 185, которые направлены в сторону поверхностей кулачков кулачковых колец 188.
При вращении регулировочной ручки 187а в направлении ослабления поверхности кулачков кулачковых колец 188 и поверхности кулачков плеч 186 выходят из взаимного зацепления. При этом вращением плеч 186 по оси крепежного болта 187 (в направлении оси Y) положение захватываемой части 189 может регулироваться в продольном направлении корпуса 103 (в направлении оси Z).
Два - верхнее и нижнее - плеча 186 расположены горизонтально (в направлении оси Х), а захватываемая часть 189 расположена между продолжающимися концами или другими концами плеч 186. Захватываемая часть 189 продолжается вертикально, и ее верхний и нижний концы связаны с другими концами плеч 186 через виброизолирующие части 191. Конструкция этого соединения через виброизолирующие части 191 по существу та же самая, что и вышеописанная конструкция виброизолирующих частей 159 по первому варианту исполнения.
Как показано в сечении по фиг.18, верхняя и нижняя виброизолирующие части 191 включают в себя, в основном, резиновые опоры 192, выполненные на других концах верхнего и нижнего плеч 186, резиновые опоры 193, выполненные на концах захватываемых частей 189 в их продольном направлении (в вертикальном направлении), и шарообразные эластичные резинки 194, расположенные между резиновыми опорами 192 и 193. Резиновые опоры 192 со стороны плеча являются признаками, которые соответствуют термину "приемная часть со стороны корпуса", резиновые опоры 193 со стороны захвата соответствуют соответственно терминам "приемная часть со стороны ручки" и "приемная часть со стороны захвата", а эластичные резинки 194 соответствуют термину "эластичный элемент" по настоящему изобретению.
В этом варианте исполнения, когда захватываемая часть 189 перемещается относительно плеч 186 (корпус 184 ручки), эластичная деформация эластичных резинок 194 в виброизолирующих частях 191 включает в себя деформацию сдвига в каждом из направлений осей Х, Y и Z (продольное, вертикальное и боковое направления), которые пересекаются друг с другом. Более конкретно, он сконструирован таким образом, что передача вибрации со стороны корпуса 184 к захватываемой части 189 может быть уменьшена демпфирующим воздействием, вызванным деформацией сдвига эластичных резинок 194.
Теперь будет подробно описана конструкция виброизолирующих частей 191, предназначенная для этих целей. В верхней виброизолирующей части 191 противолежащие смежные поверхности 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата обычно имеют обратную V-образную форму, если смотреть по направлению оси Z, а в нижней виброизолирующей части 191 противолежащие смежные поверхности 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата обычно имеют V-образную форму, если смотреть по направлению оси Z. Более конкретно, резиновые опоры 192, 193 со стороны ручки и со стороны захвата в верхней и в нижней виброизолирующих частях 191 имеют соответствующие смежные поверхности 192а, 193а, противолежащие друг другу через эластичные резинки 194. И в верхней, и в нижней виброизолирующих частях 191 направление нормали к смежной поверхности 192а резиновой опоры 192 со стороны ручки совпадает с направлением нормали к смежной поверхности 193а резиновой опоры 193 со стороны захвата. Кроме того, каждая из смежных поверхностей 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата в виброизолирующих частях 191 имеет прямую наклонную поверхность, сформированную таким образом, что направление нормали к смежным поверхностям 192а, 193а ортогонально пересекает ось Z и наклонно, под предопределенным углом (например, приблизительно в 45°) пересекает оси Х и Y. Дополнительно, смежные поверхности 192а, 193а (наклонные поверхности) резиновых опор 192, 193 со стороны ручки и со стороны захвата в виброизолирующих частях 191 выполнены симметрично относительно осей Y и Х.
Дополнительно, смежные поверхности 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата в верхней и в нижней виброизолирующих частях 191 противолежат относительно друг друга с определенным зазором. Обычно в этих смежных поверхностях 192а, 193а выполнены соответственные полусферические контактные углубления 192b, 193b, и между этими полусферическими контактными углублениями 192b, 193b размещаются и удерживаются шарообразные эластичные резинки 194.
Дополнительная D-образная ручка 183 в соответствии с данным вариантом исполнения построена так, как описано выше, и установлена для работы на цилиндр 103а перфоратора 101. При выполнении операции перфорационного сверления импульсная циклическая вибрация, возникающая в корпусе 103, идет (передается) из корпуса 103 в захватываемую часть 189 по плечам 186 корпуса 184 ручки, но эта передача вибрации понижена эластичной деформацией или деформацией сдвига, включая деформацию сжатия, эластичных резинок 194 в виброизолирующих частях 191.
В этом варианте исполнения смежные поверхности 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата сформированы таким образом, что направление нормали к смежным поверхностям ортогонально оси Z (то есть направление плоскостей смежных поверхностей 192а, 193а параллельно оси Z). Поэтому когда вибрация от корпуса 103 передается к захватываемой части 189 через плечи 186 в направлении оси Z, резиновые опоры 192 со стороны захвата и резиновые опоры 193 со стороны захвата перемещаются относительно друг друга в направлении оси Z, и в результате на эластичные резинки 194 через сферические контактные поверхности контактных углублений 192b, 193b воздействует сила, главным образом, в направлении создания деформации сдвига. Более конкретно, когда деформация передается на эластичные резинки 194 в направлении оси Z, эластичная деформация этих эластичных резинок 194 в значительной степени проявляется в виде деформации сдвига (включая частично и деформацию сжатия), и передача вибрации от корпуса 103 к захватываемой части 189 через плечи 186 корпуса 184 ручки может быть уменьшена демпфирующим воздействием на вибрацию, вызванным этой деформацией сдвига. Здесь сила в направлении деформации сдвига включает в себя силу в направлении линейного среза или в направлении скручивания.
Таким образом, в соответствии с данным вариантом исполнения он построен таким образом, что эластичная деформация эластичных резинок 194 в значительной степени проявляется в виде деформации сдвига в направлении оси Z или в направлении ударного перемещения ударной насадки 119, в котором настоятельно необходимо понижение вибрации. При такой конструкции может быть гарантированно обеспечен эффект понижение вибрации захватываемой части 189 в направлении оси Z.
Далее, каждая из смежных поверхностей 192а, 193а резиновых опор 192, 193 со стороны ручки и со стороны захвата имеет наклонную поверхность, образованную таким образом, что направление нормали к этим смежным поверхностям 192а, 193а пересекается под предопределенным наклонным углом к осям Х и Y. Поэтому когда вибрация, вызванная в корпусе 103 в направлении оси Y (вертикальное направление) или в направлении оси Х (боковое направление), передается на эластичные резинки 194, резиновые опоры 192 со стороны корпуса ручки и резиновые опоры 192 со стороны захвата перемещаются относительно друг друга в направлении оси Y или оси Х, и в результате на эластичные резинки 194 через сферические контактные поверхности контактных углублений 192b, 193b воздействуют силы в направлении сжатия и в направлении сдвига. Более конкретно, когда деформация передается на эластичные резинки 194 в направлении оси Y или оси Х, деформация этих эластичных резинок 194 проявляется как в виде деформации сжатия, так и в виде деформации сдвига. Эластичные резинки 194 имеют более низкую прочность сдвига по сравнению с их прочностью сжатия. Поэтому в направлении осей Y или Х может быть достигнут как обусловленный деформацией сдвига эластичных резинок 194 эффект уменьшения вибрации захватываемой части 189, так и обусловленный деформацией сжатия эффект предотвращения колебания захватываемой части 189. Дополнительно вследствие эффекта предотвращения колебания может быть обеспечена рабочая стабильность (работоспособность).
Как описано выше, эластичные резинки 194 имеют более низкую прочность сдвига по сравнению с их прочностью сжатия, так что деформацией сдвига может быть достигнут более высокий эффект уменьшения вибрации, чем деформацией сжатия. В соответствии с этим вариантом исполнения, используя это свойство эластичных резинок 194, получена такая конструкция, в которой в эластичных резинках 194 деформация сдвига возникает в трех направлениях осей Х, Y и Z. При такой конструкции эффект уменьшения вибрации захватываемой части 189 использованием деформации сдвига эластичных резинок 194 может быть достигнут по всем трем направлениям осей Х, Y и Z или по существу по всем направлениям, включая промежуточные направления между осями Х, Y и Z.
Седьмой вариант исполнения изобретения
Теперь со ссылками на фиг.19-21 будет описан седьмой вариант исполнения настоящего изобретения. Этот вариант исполнения представляет собой модификацию дополнительной D-образной ручки вышеописанного шестого варианта исполнения. Фиг.19 представляет собой вид в перспективе, показывающий дополнительную D-образную ручку 183, фиг.20 представляет собой вид сбоку на дополнительную D-образную ручку 183, а фиг.21 представляет собой сечение, выполненное по линии Н-Н на фиг.20.
Как показано на фиг.21, в этом варианте исполнения другие концы верхнего и нижнего плеча 186 резиновых опор 192 со стороны плеча связаны стержнеобразной частью в форме сердечника 186b, проходящего в вертикальном направлении внутри захватываемой части 189 (направление оси Y). В других аспектах этот вариант исполнения по существу имеет ту же конструкцию, что и вышеописанный шестой вариант исполнения. Сердечник 186b может быть выполнен как целая часть вместе с плечами 186, или же он может быть выполнен отдельно и прикреплен к плечам 186 винтами или другим средством крепления. Захватываемая часть 189 имеет полую цилиндрическую конструкцию и соединена с плечами 186 через виброизолирующие части 191. Виброизолирующие части 191 включают в себя резиновые опоры 192 со стороны плеча, выполненные на других концах плеч 186, резиновые опоры 193, выполненные на концах захватываемой части 189 в ее продольном направлении, и шарообразные эластичные резинки 194, расположенные между резиновыми опорами 192 и 193. Резиновые опоры 192, 193 имеют конструкцию, подобную конструкции резиновых опор в шестом варианте исполнения. Компонентам, которые по существу идентичны одноименным компонентам шестого варианта исполнения, даны те же самые ссылочные позиции, что и в шестом варианте исполнения, и они описываться не будут.
Захватываемая часть 189 образована двумя - передними и задними - полуцилиндрическими половинками. Эти две половинки надеты поверх сердечника 186b и соединены вместе соответствующим средством соединения, так чтобы эта захватываемая часть 189 была скреплена с плечами 186.
В соответствии с этим вариантом исполнения, имеющим вышеописанную конструкцию, в отношении уменьшения вибрации захватываемой части 189 в нем может быть достигнут тот же самый эффект, что и в шестом варианте исполнения. В этом варианте исполнения верхнее и нижнее плечи 186 объединены сердечником 186b, который проходит внутри захватываемой части 189. Таким образом, захватываемая часть 189 и установочная часть в виде кольцевого элемента 185, устанавливаемого на цилиндре 103а, могут быть сконфигурированы в виде замкнутой конструкции. Поэтому по сравнению с шестым вариантом исполнения прочность плеч 186 может быть увеличена.
В вышеописанных вариантах исполнения электрический перфоратор описан в качестве иллюстрационного примера ручного механизированного инструмента. Однако настоящее изобретение не ограничено электрическим перфоратором, но может быть применено к отбойному молотку, который выполняет операции дробления обрабатываемого элемента только ударными перемещениями инструментальной насадки в виде молоткового долота вдоль его осевого. Кроме того, оно может быть применено не только к ударному механизированному инструменту, такому как отбойный молоток и перфоратор, но и к режущему механизированному инструменту, такому как ножовочная пила и лобзик, который выполняет режущую операцию обрабатываемого элемента возвратно-поступательными перемещениями инструмента в виде ножовочного пильного полотна.
Далее, в шестом и в седьмом вариантах исполнения передача вибрации к захватываемой части 189 и к корпусу 184 ручки уменьшена в трех направлениях осей Х, Y и Z использованием демпфирующего воздействия на деформацию, вызванного деформацией сдвига эластичных резинок. Дополнительно, вариант исполнения может быть построен таким образом, чтобы использованием торсионного стержня 161, описанного во втором и в третьем вариантах исполнения, вращение захватываемой части 189 по оси Y относительно плеч 186 было исключено.
Позиционные обозначения
101 - перфоратор
103 - корпус (корпус механизированного инструмента)
103а - цилиндр
105 - отсек электродвигателя
107 - отсек редуктора
109 - ручной захват
111 - приводной электродвигатель
113 - механизм преобразования перемещения
115 - ударный механизм
117 - механизм передачи мощности
119 - ударная насадка (инструментальная насадка)
129 - поршень
137 - инструментальный патрон
141 - цилиндр
141а - воздушная камера
143 - ударник
145 - ударный стержень
151 - закрывающий элемент
152 - эластичная резинка (эластичный элемент)
153 - резиновая опора с закрывающей стороны (приемная часть со стороны корпуса)
153а - смежная поверхность
153b - контактное углубление
153с - установочный паз
155 - захватываемая часть
157 - резиновая опора со стороны захвата (приемная часть со стороны корпуса)
157а - смежная поверхность
157b - контактное углубление
157с - установочный паз
159 - виброизолирующая часть
161 - торсионный стержень (механизм предотвращения вращения)
161а - нижний прямой участок
161b - верхний прямой участок
161с - правый или левый вертикальный участок
163 - крышка стержня
171 - дополнительная ручка
172 - корпус ручки
173 - установочный элемент
174 - стягивающая лента
175 - винтовой элемент
176 - захватываемая часть
177 - виброизолирующая часть
178 - резиновая опора со стороны корпуса ручки (приемная часть со стороны корпуса)
178а - смежная поверхность
178b - контактное углубление
178с - установочный паз
179 - резиновая опора со стороны захвата (приемная часть со стороны ручки) (приемная часть со стороны захвата)
179а - смежная поверхность
179b - контактное углубление
179с - установочный паз
181 - эластичная резинка (эластичный элемент)
183 - дополнительная ручка
184 - корпус ручки
185 - кольцевой элемент
185а - дуговой полукруглый элемент
185b - стержень
185с - другой конец
186 - плечо
186а - один конец (цилиндрическая опора)
186b - сердечник
187 - крепежный болт
187а - регулировочная ручка
187b - головка
188 - кулачковое кольцо
189 - захватываемая часть
191 - виброизолирующая часть
192а - смежная поверхность
192b - контактное углубление
193а - резиновая опора со стороны захвата (приемная часть со стороны ручки) (приемная часть со стороны захвата)
193b - контактное углубление
194 - эластичная резинка (эластичный элемент)
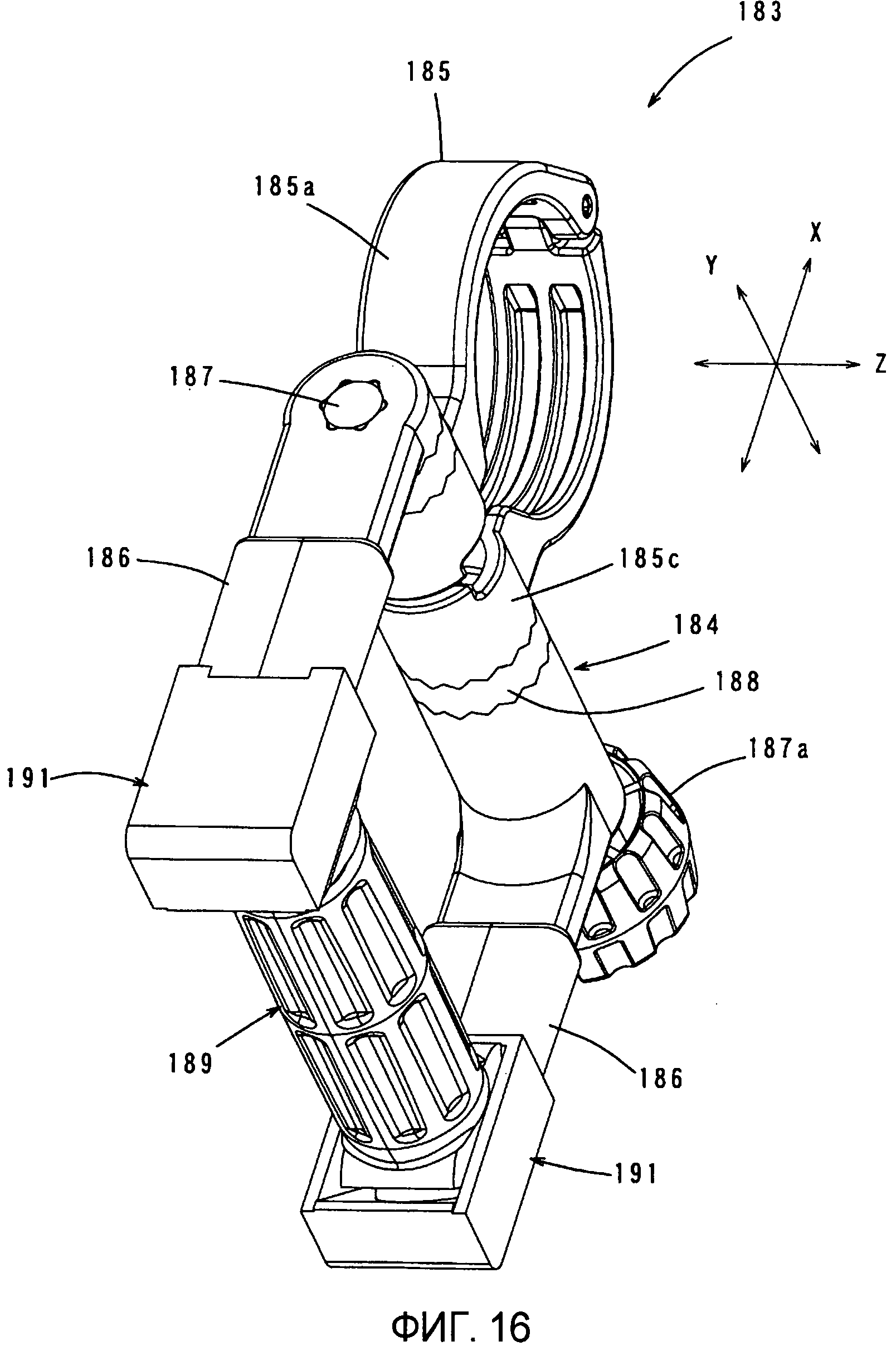
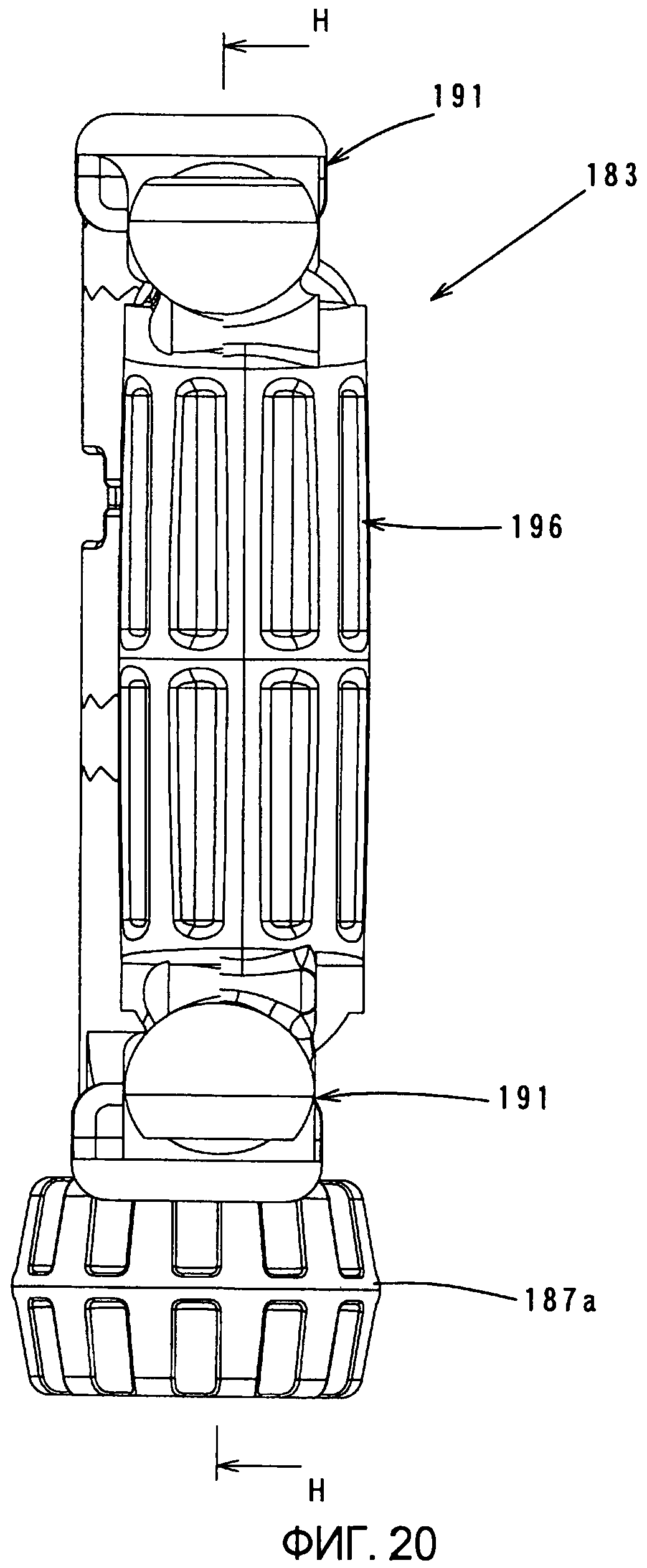
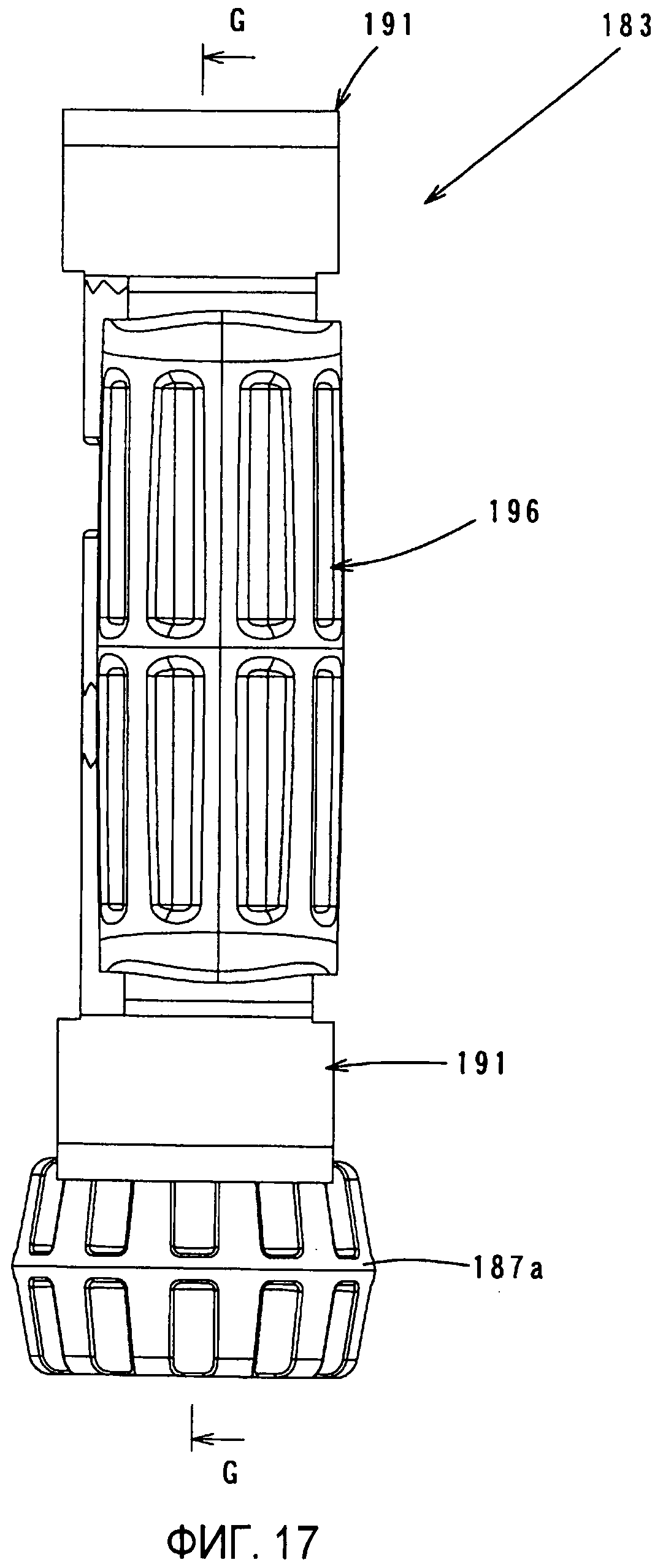
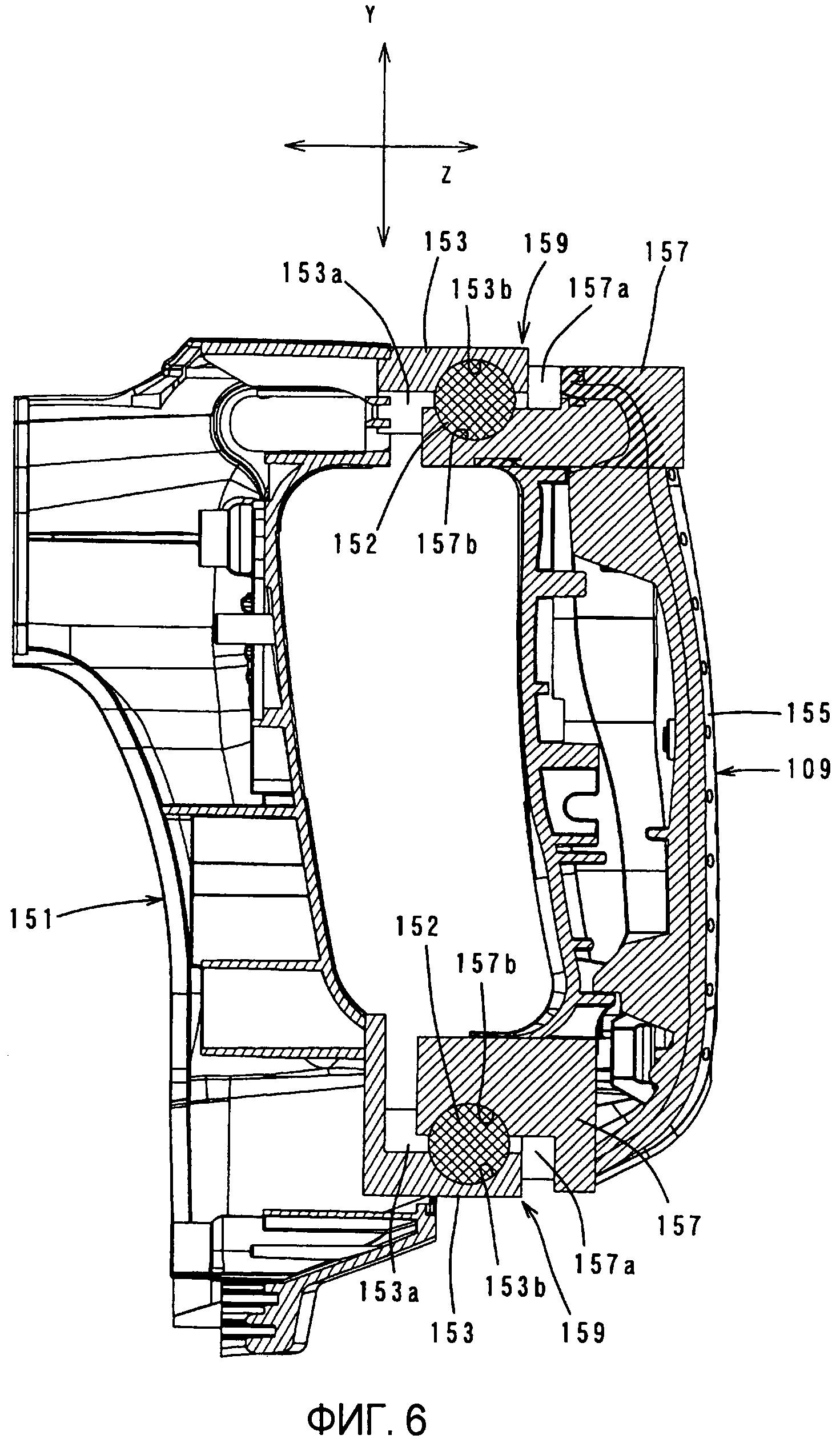
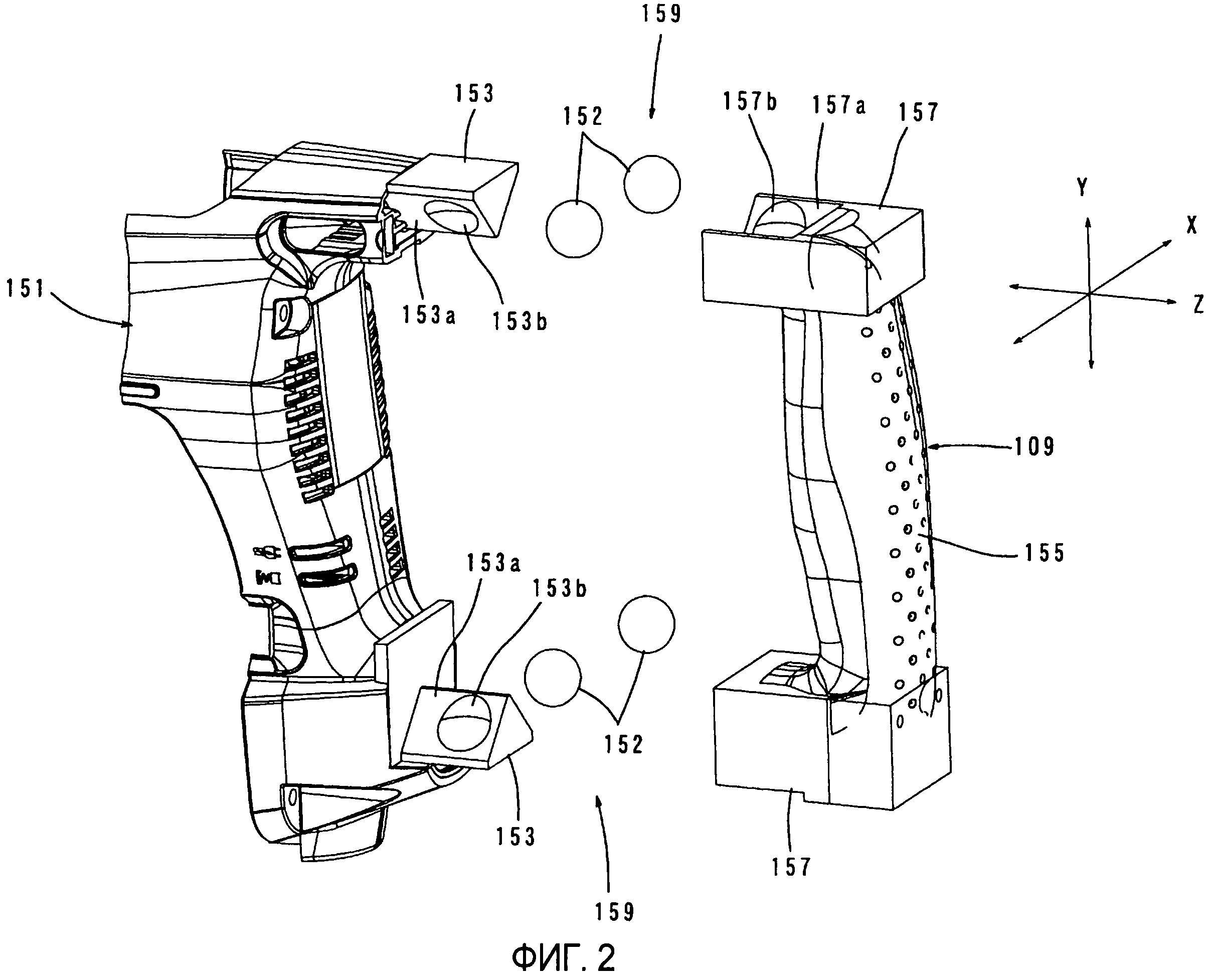
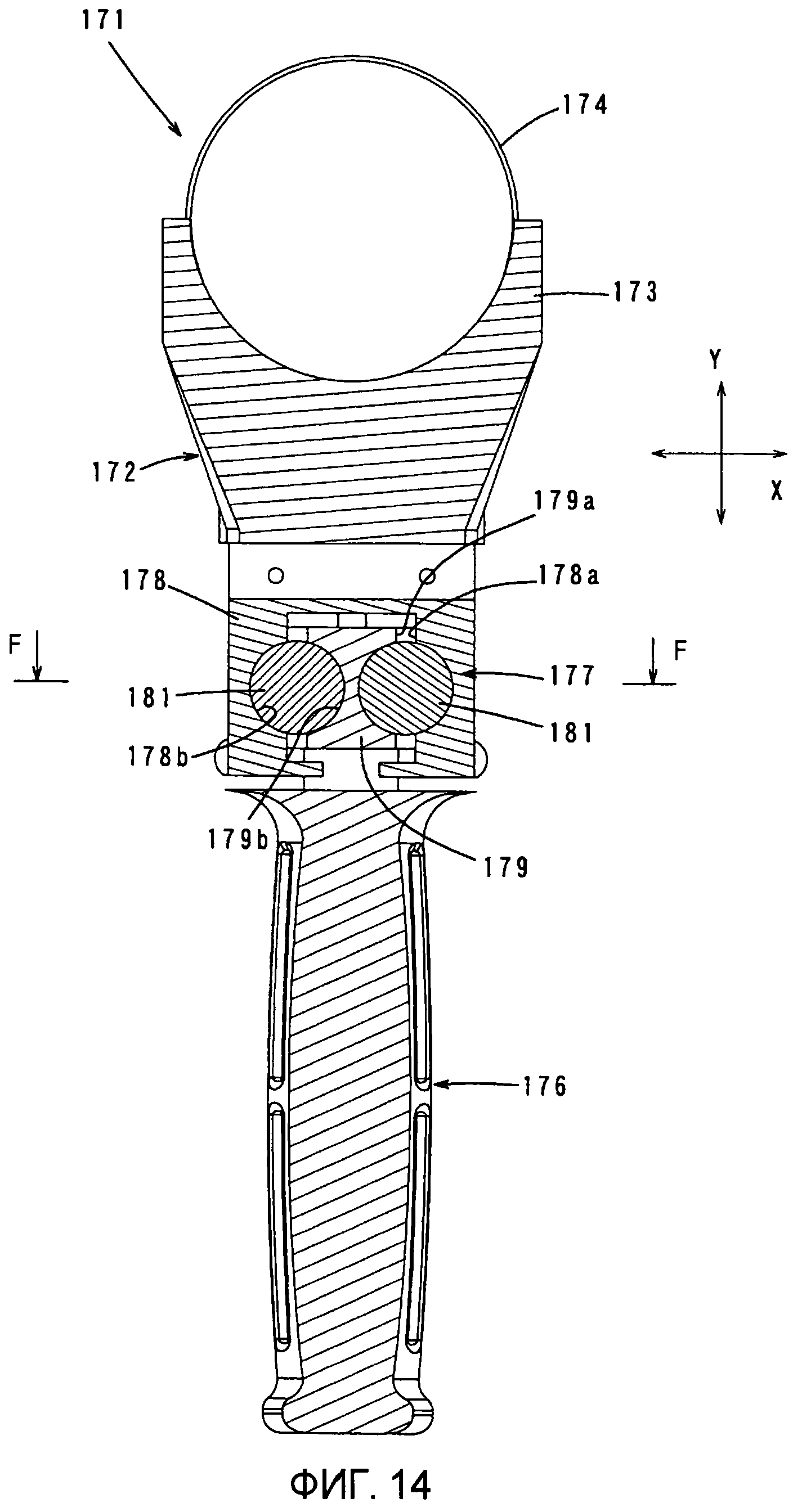
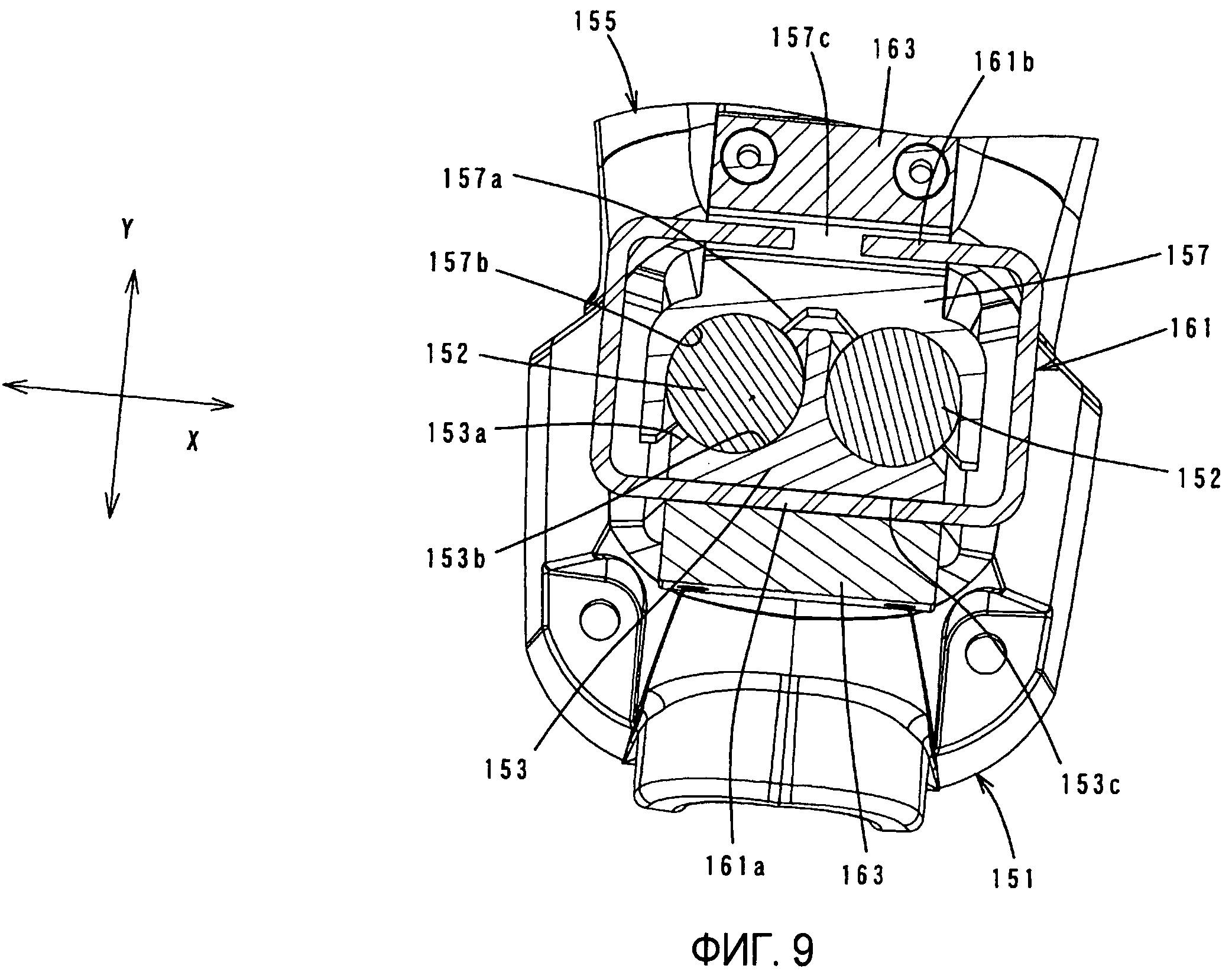
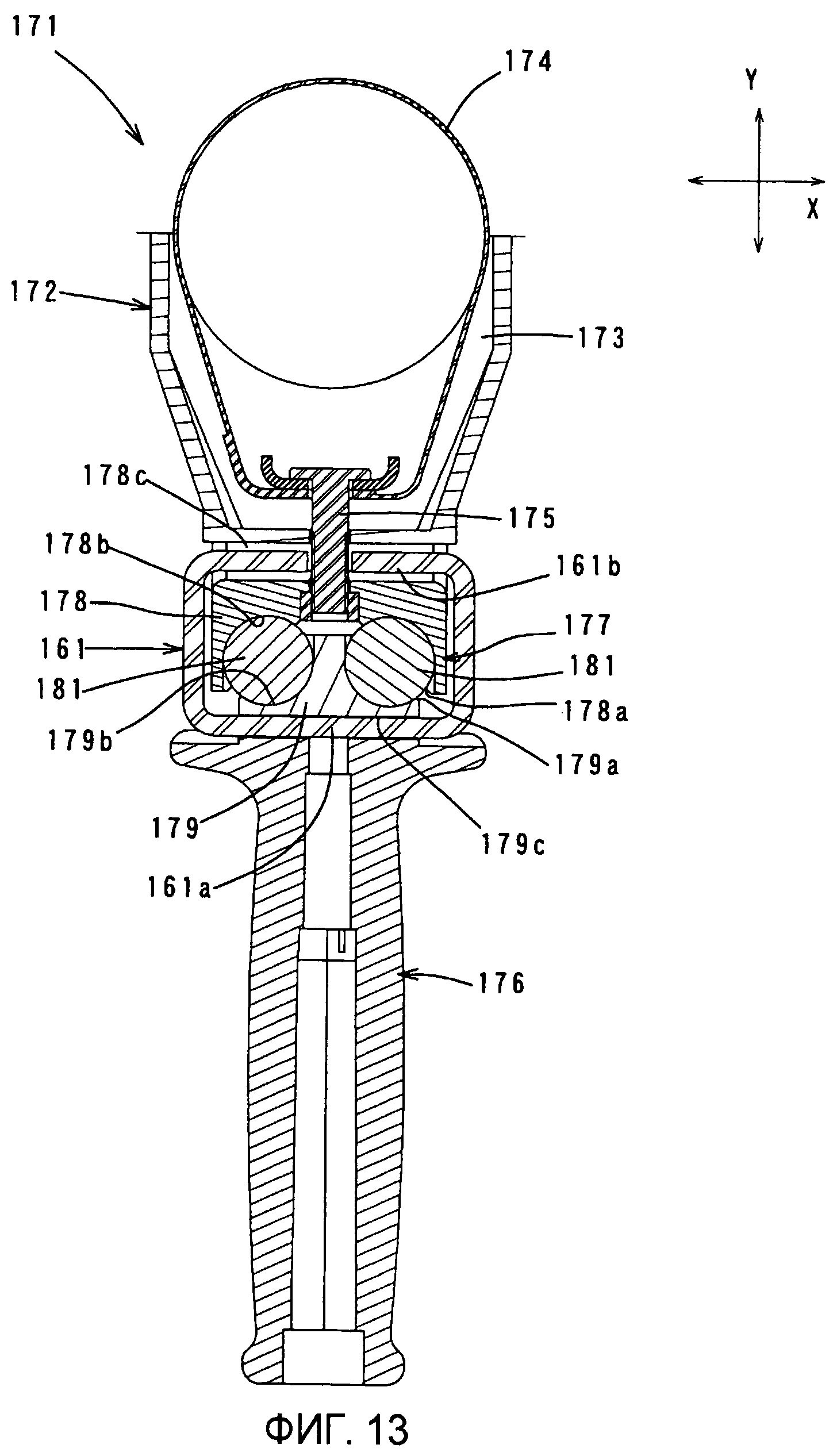
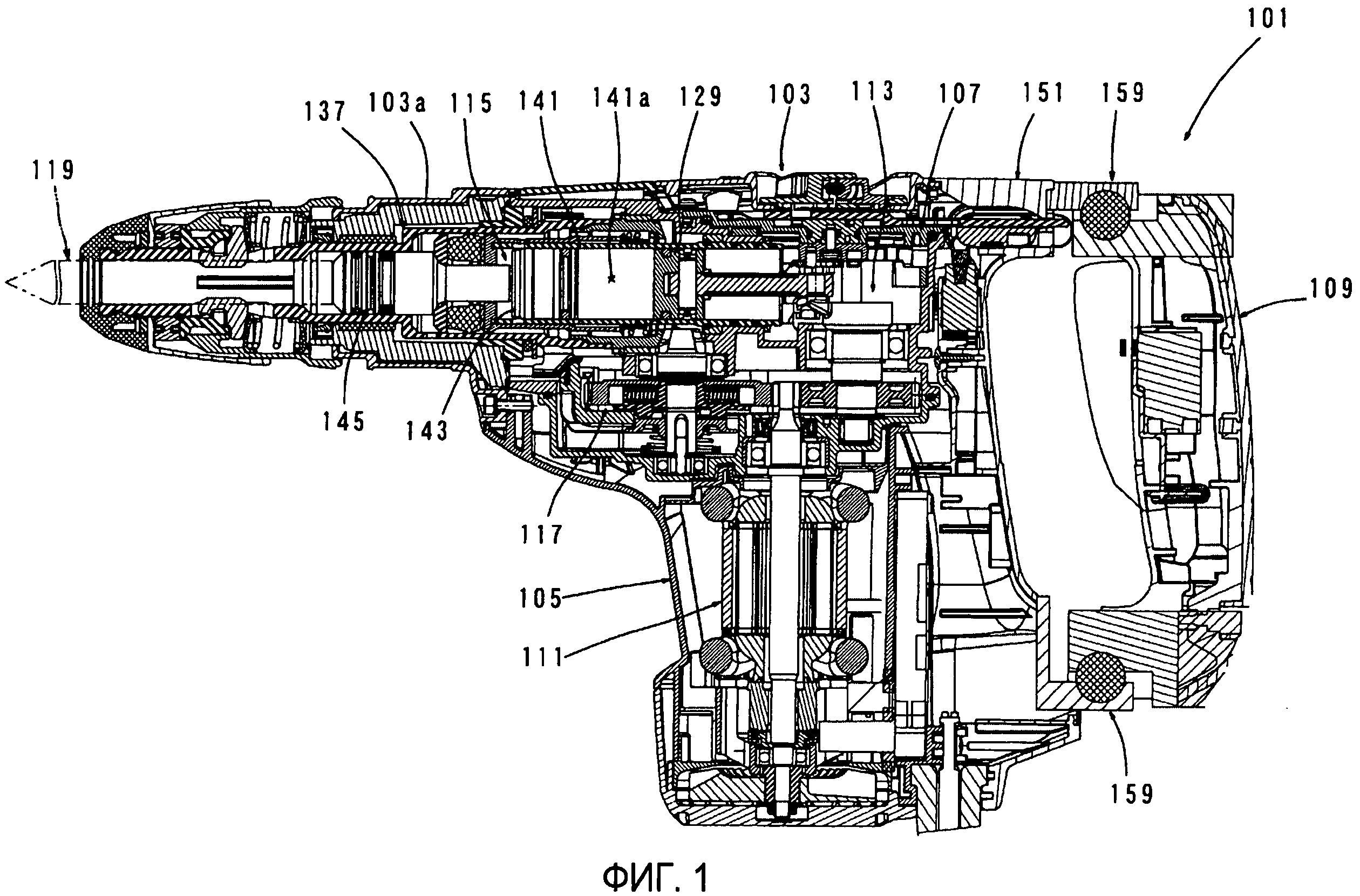
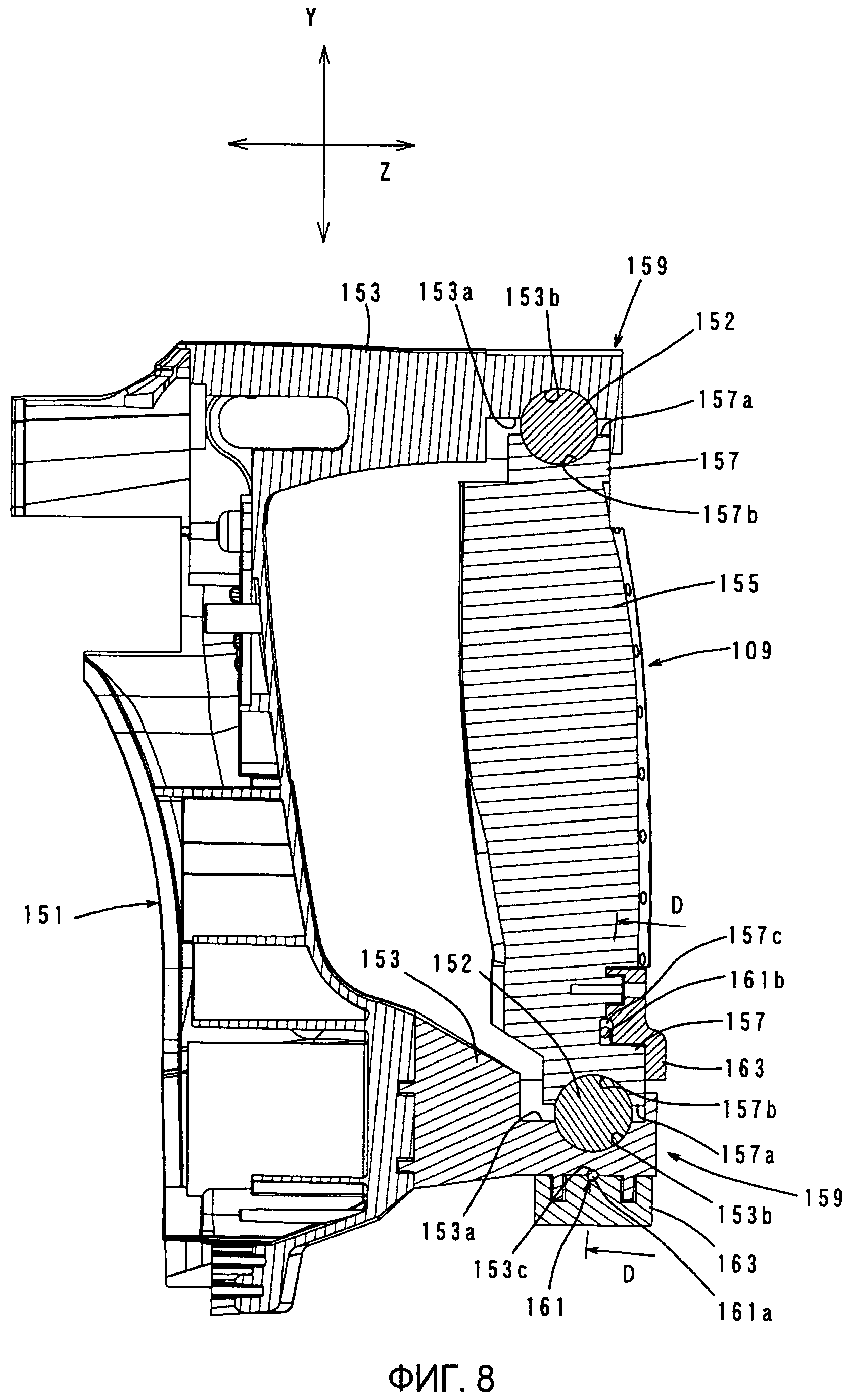
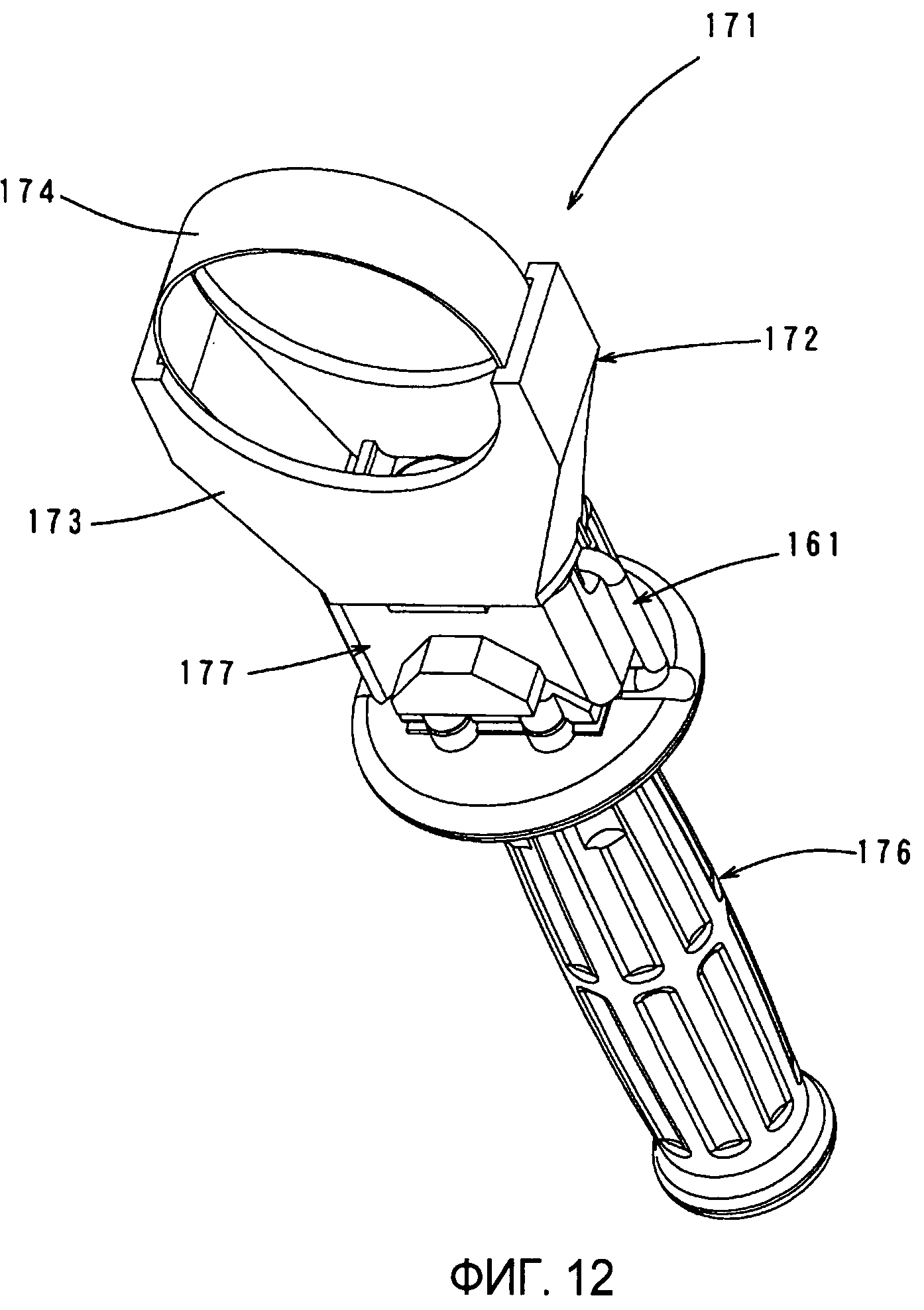
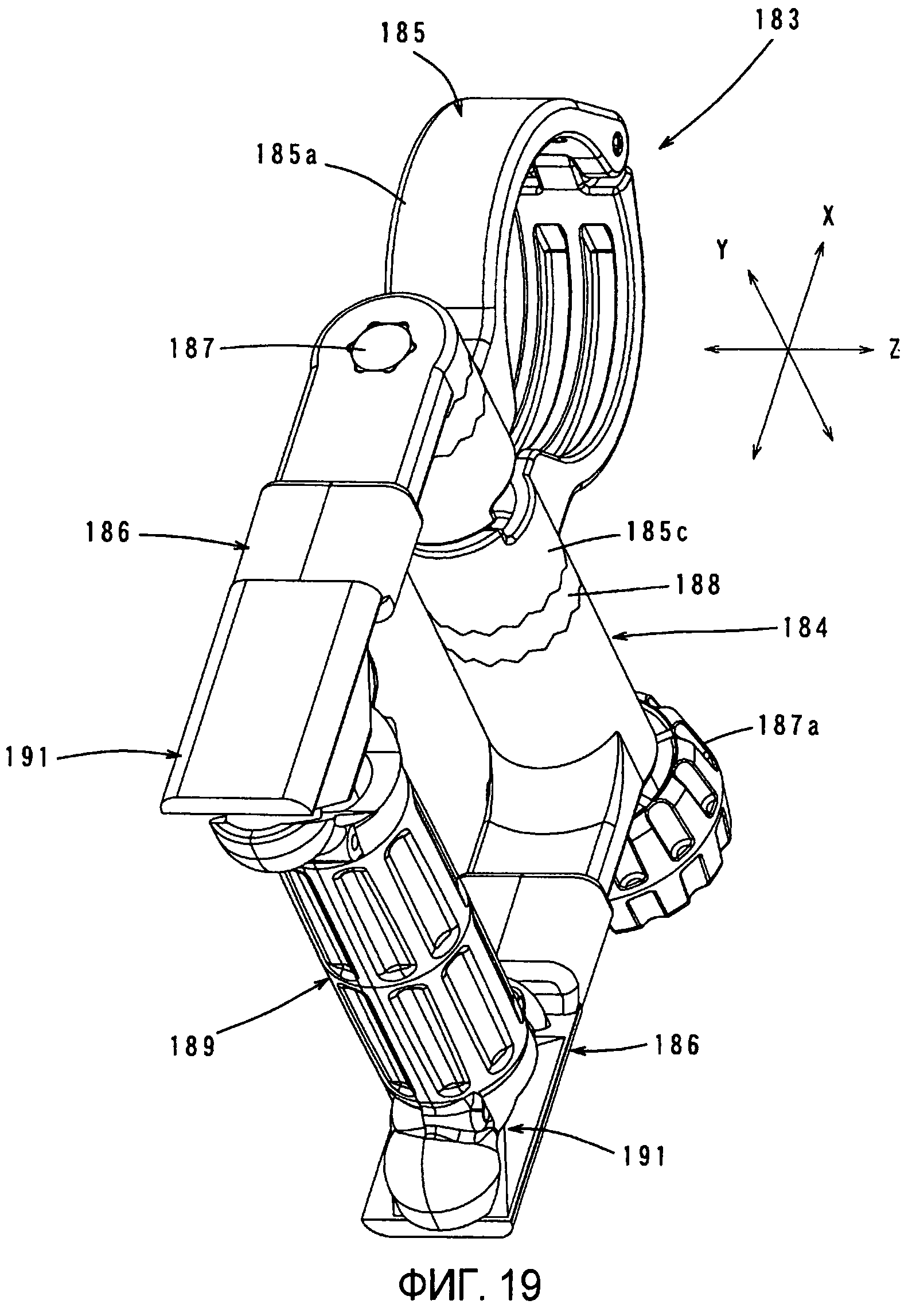
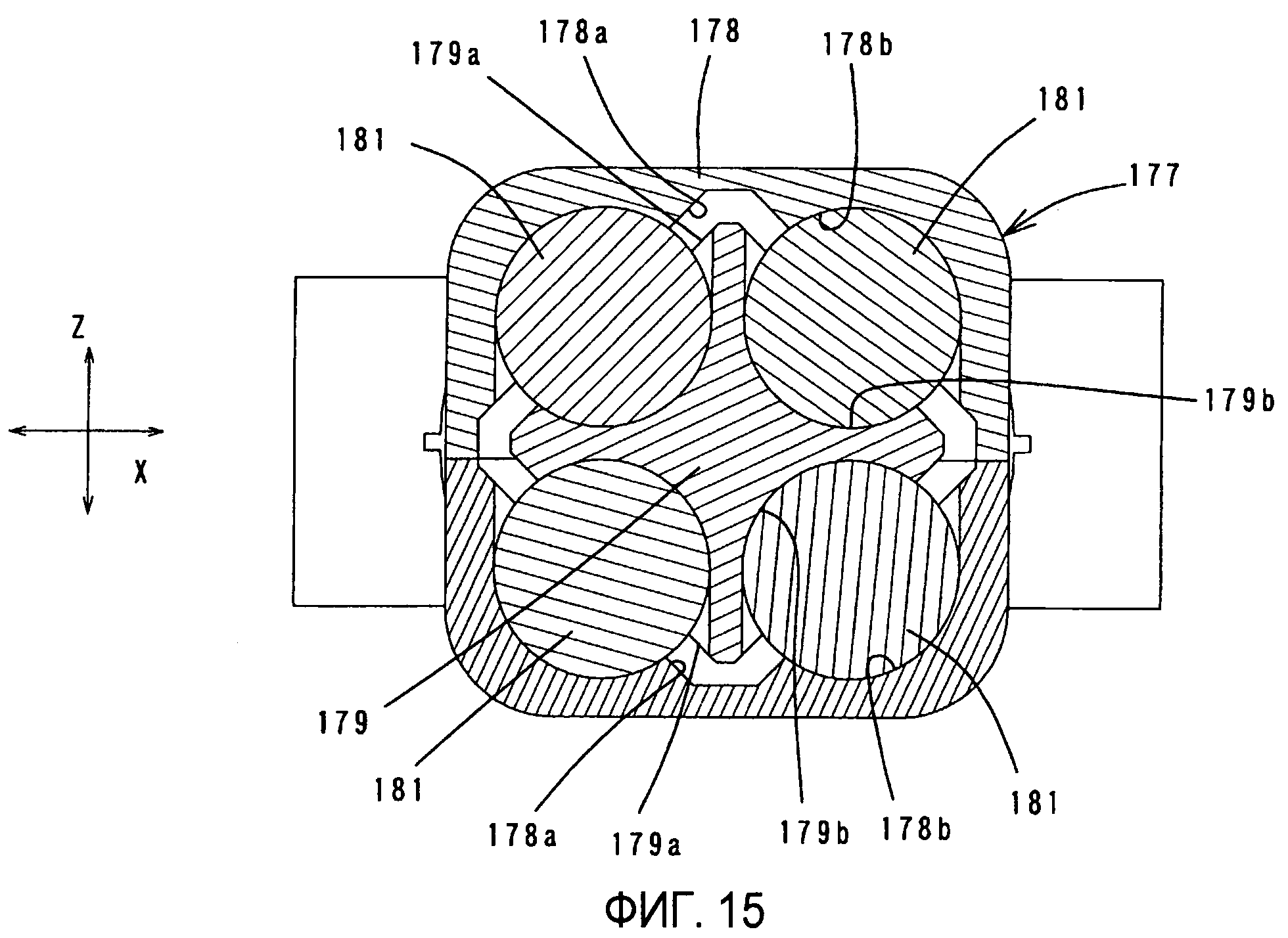
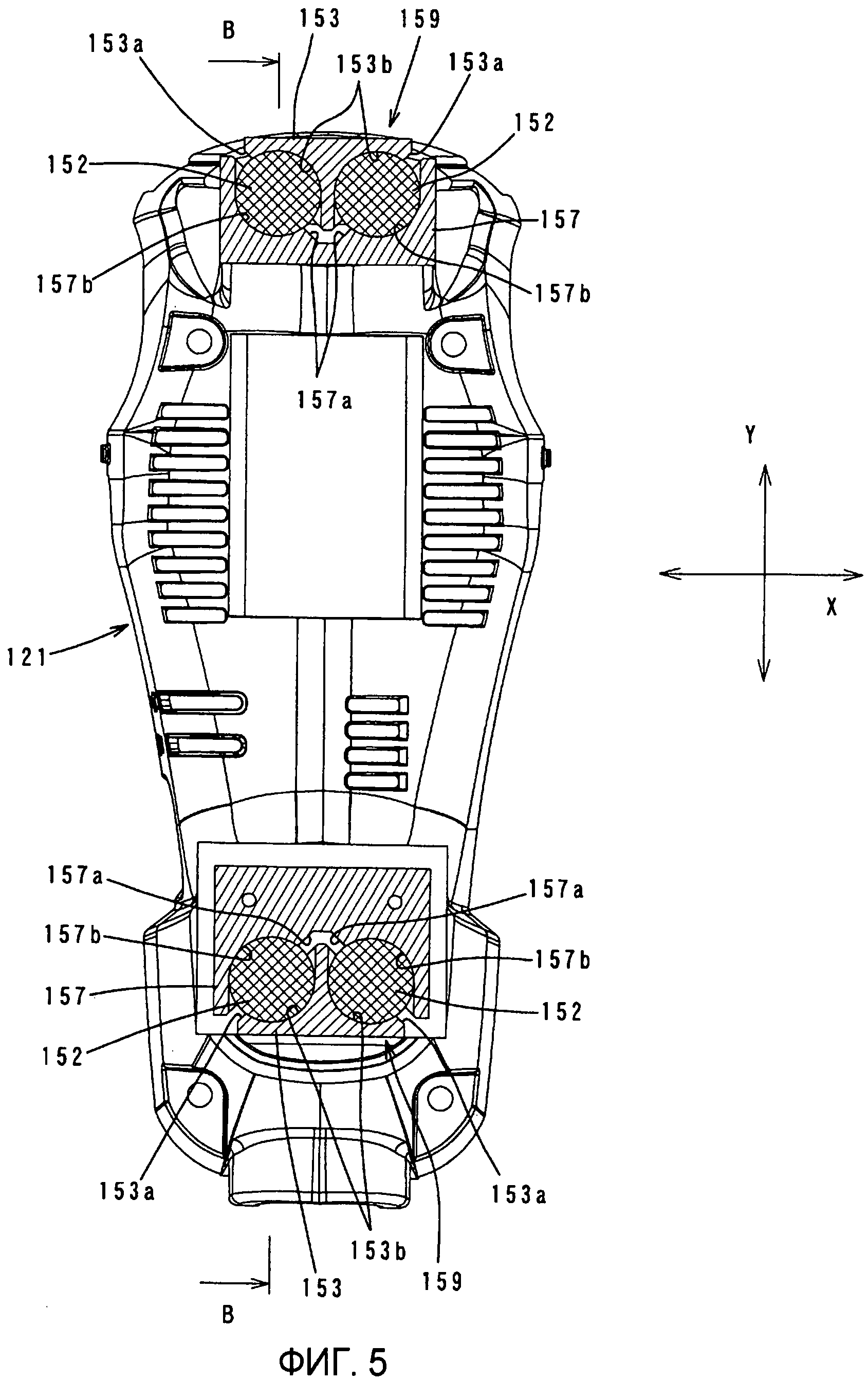
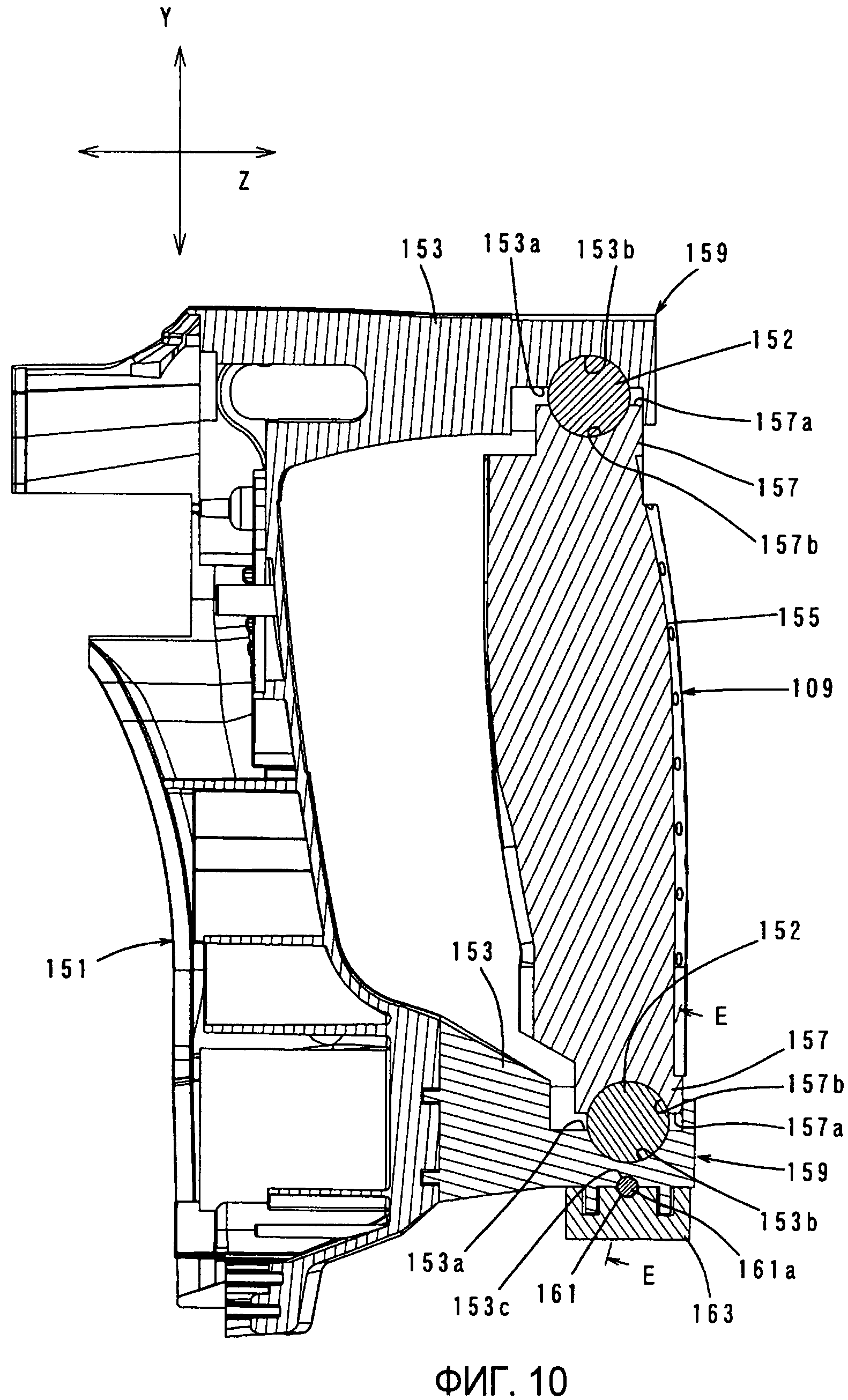
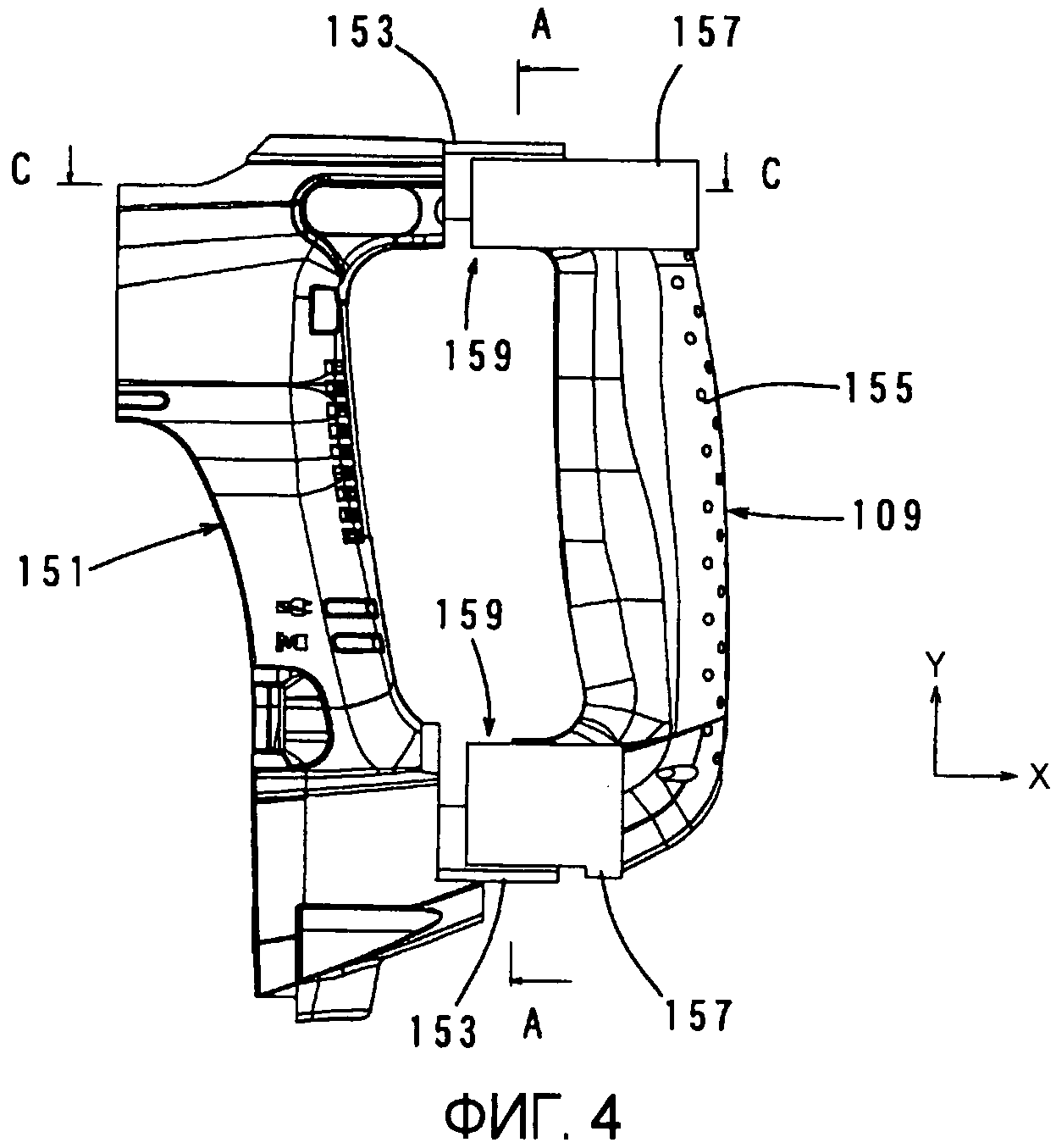
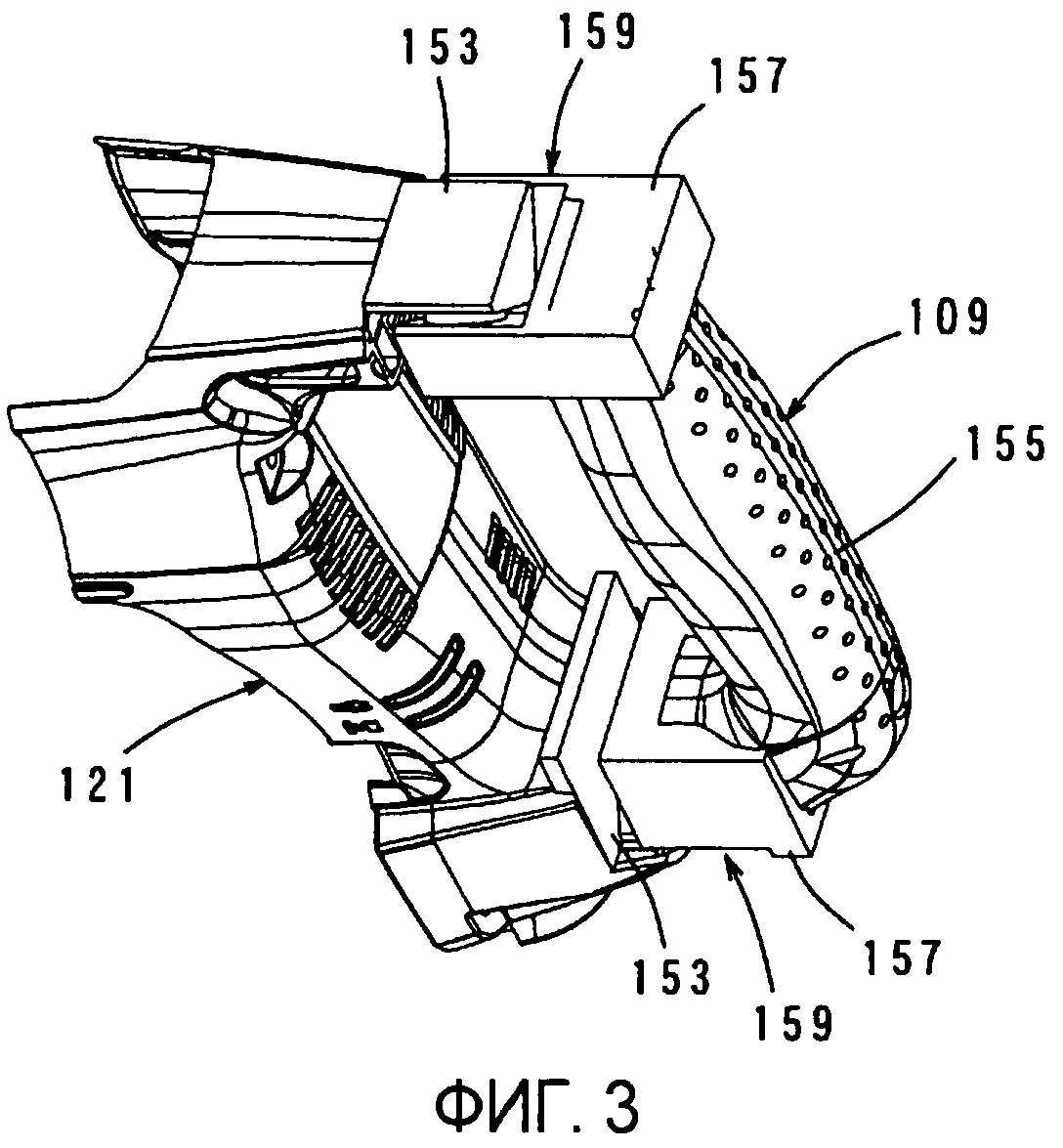
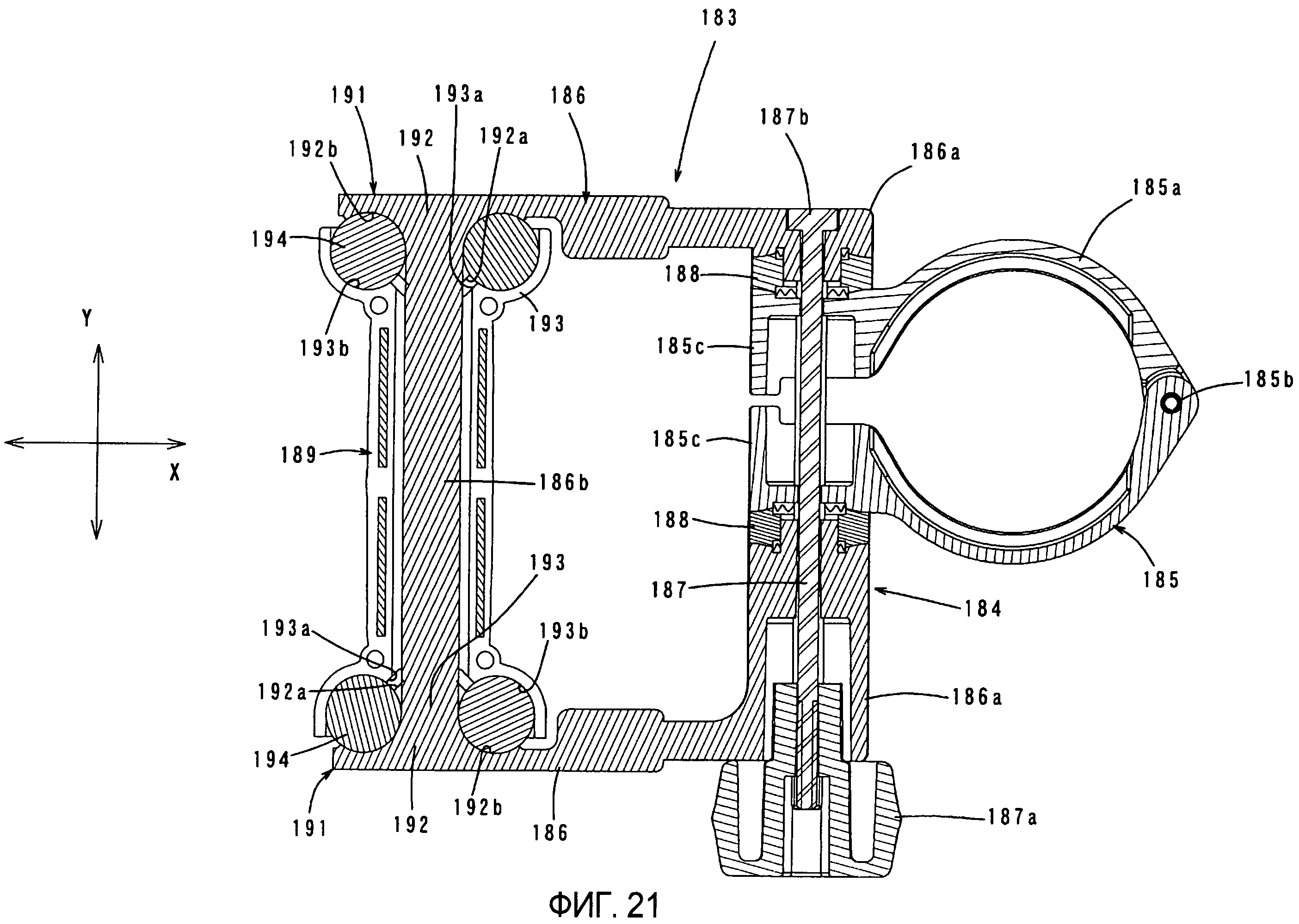
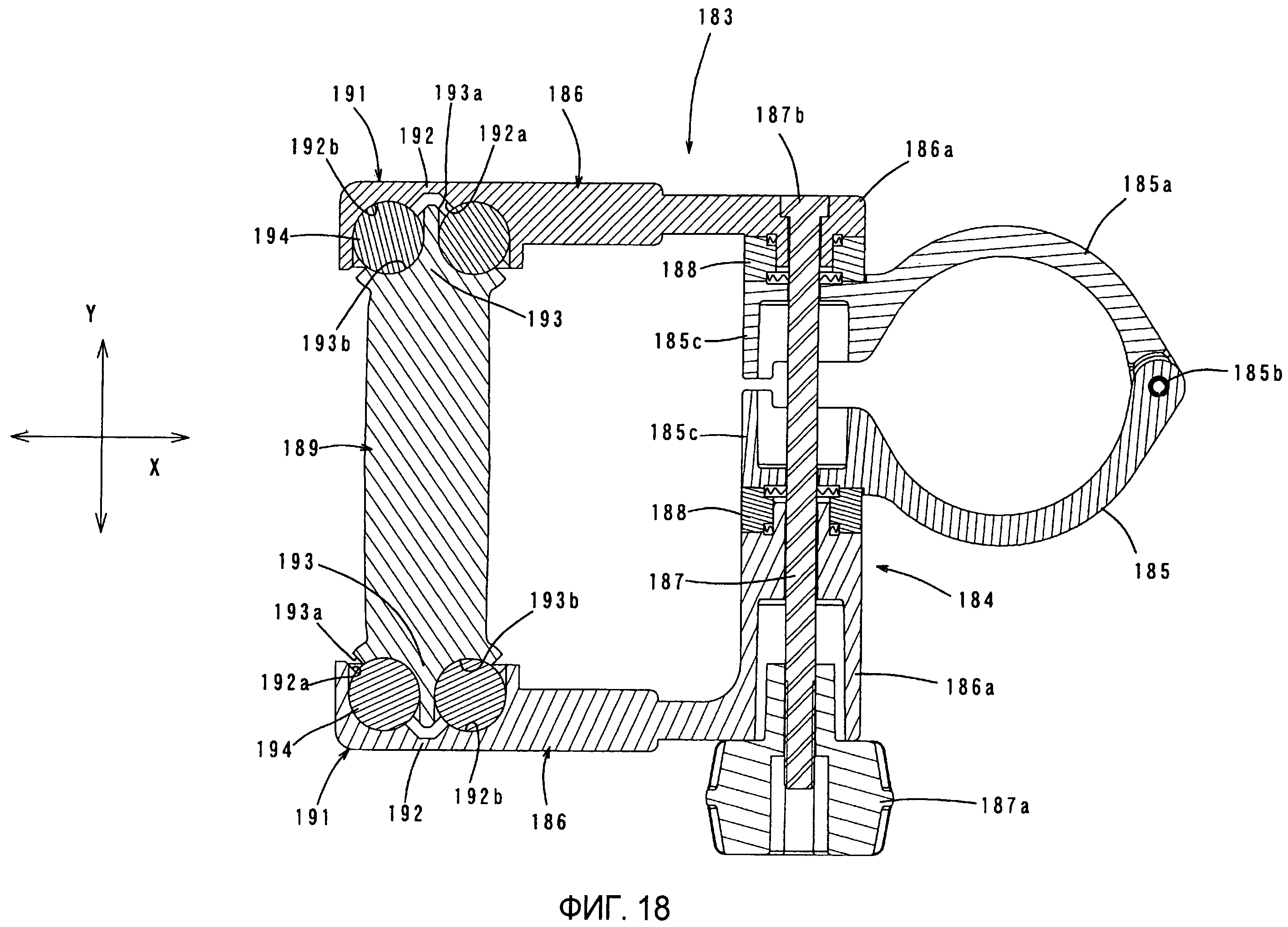
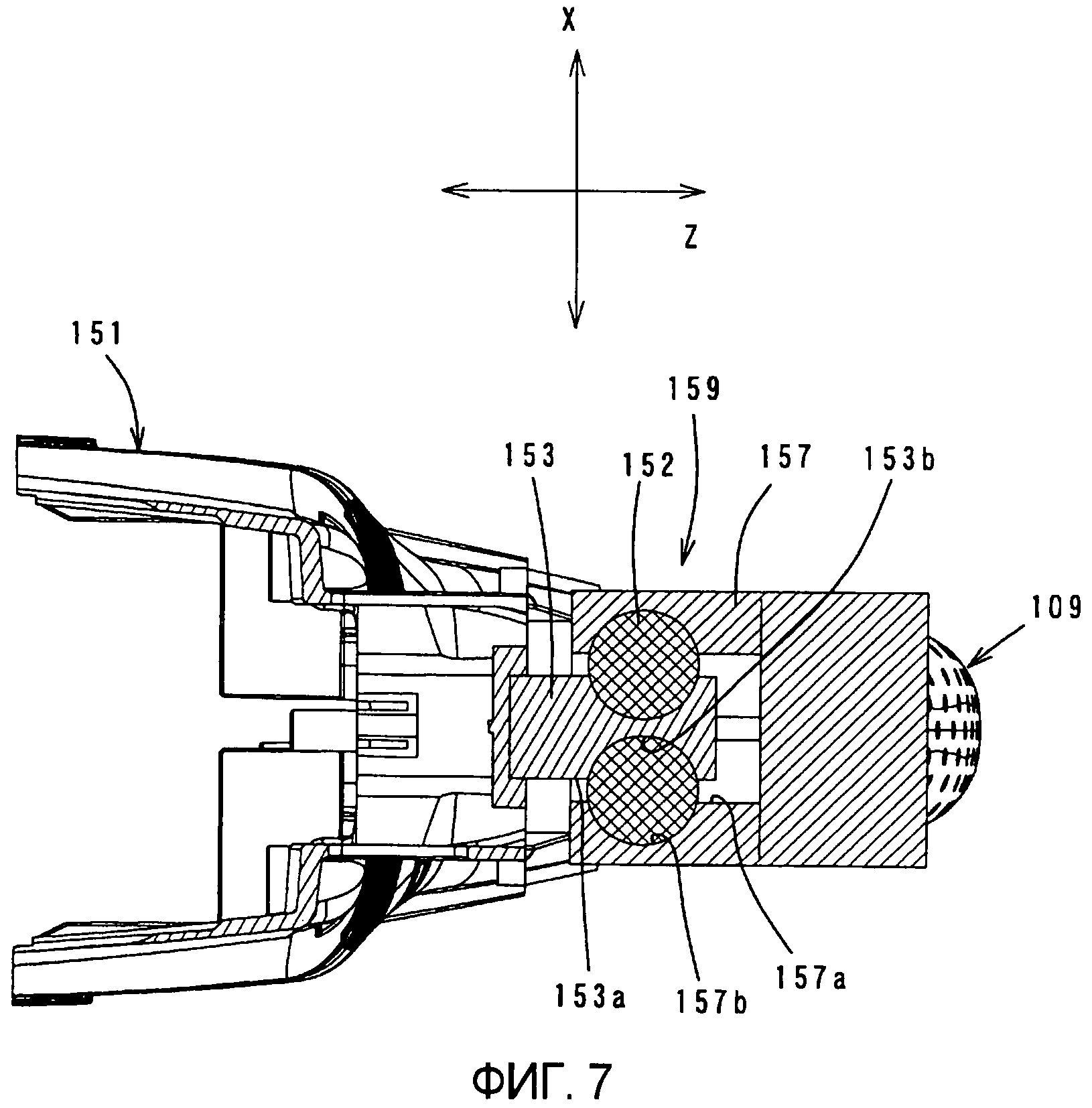
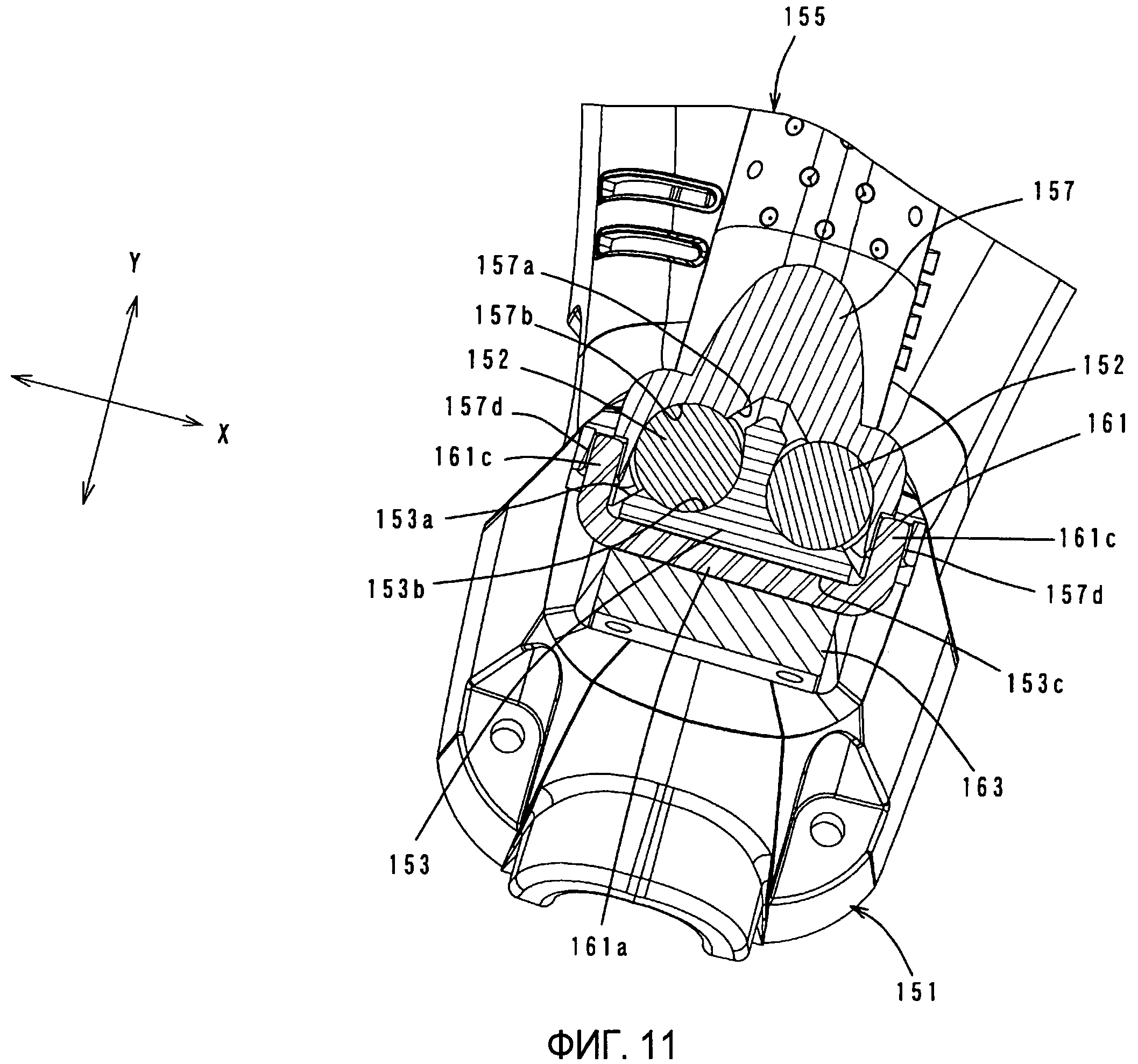
Ручные очистительные устройства
Режущие устройства
Схема зарядки для вторичной аккумуляторной батареи
Устройство переключения вращения по часовой стрелке и против часовой стрелки для электроинструмента
Косилка, к которой можно прикреплять и отсоединять пакет батарей
Ударный инструмент
Ударный инструмент
Электроинструмент
Конструкция с крюком механизированного инструмента
Аккумуляторный источник питания для приводного инструмента и приводной инструмент
Ручные очистительные устройства
Режущие устройства
Схема зарядки для вторичной аккумуляторной батареи
Устройство переключения вращения по часовой стрелке и против часовой стрелки для электроинструмента
Косилка, к которой можно прикреплять и отсоединять пакет батарей
Ударный инструмент
Ударный инструмент
Электроинструмент
Конструкция с крюком механизированного инструмента
Аккумуляторный источник питания для приводного инструмента и приводной инструмент

