Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ДВИГАТЕЛЯ ВО ВРЕМЯ ФАЗЫ ПУСКА ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу согласно преамбуле п.1 управления скоростью вращения двигателя при приведении транспортного средства в движение. Изобретение относится также к устройству согласно преамбуле п.11 для управления скоростью вращения двигателя при приведении транспортного средства в движение. Изобретение также относится к автомобилю. Помимо этого изобретение относится к машинной программе и машинному программному продукту.
Уровень техники изобретения
Автомобили могут оснащаться автоматическими трансмиссиями, содержащими автоматические системы сцепления. Одним вариантом систем сцепления являются так называемые пробуксовывающие сцепления, например, однодискового или двухдискового типа. В случае транспортного средства с таким автоматизированным сцеплением водитель работает педалью акселератора, чтобы мобилизовать мощность и, следовательно, крутящий момент для продвижения транспортного средства вперед, а положение сцепления определяет величину передаваемого крутящего момента.
При приведении сравнительно тяжелого транспортного средства в движение, к примеру, на крутом подъеме может произойти так, что крутящего момента двигателя при наименьшей возможной/заданной скорости вращения двигателя будет не достаточно, чтобы заставить транспортное средство сдвинуться, в таком случае скорость вращения двигателя должна быть увеличена. Отсюда и необходимость в управлении скоростью вращения двигателя при приведении транспортного средства в движение. Мощность в сцеплении связана со скоростью вращения двигателя, поскольку чем выше скорость вращения двигателя, тем больше мощности подается к сцеплению и тем больше износ сцепления. Следовательно, если скорость вращения двигателя повышают более чем необходимо, то сцепление будет испытывать излишний износ, а если скорость вращения двигателя повышают слишком мало или совсем не повышают, то транспортное средство рискует не сдвинуться совсем.
Задача изобретения
Задача настоящего изобретения состоит в обеспечении способа управления скоростью вращения двигателя автомобиля с автоматизированной трансмиссией, когда он приводится в движение, таким образом, что предотвращается излишний износ его сцепления, при этом в то же самое время транспортное средство может легко и плавно трогаться даже тогда, когда требуется большая величина крутящего момента, как при отправлении на подъеме.
Другая задача настоящего изобретения состоит в обеспечении устройства для управления скоростью вращения двигателя автомобиля с автоматизированной трансмиссией, когда он приводится в движение, таким образом, что предотвращается излишний износ его сцепления, при этом в то же самое время транспортное средство может легко и плавно трогаться даже тогда, когда требуется большая величина крутящего момента, как при отправлении на подъеме.
Дополнительная задача настоящего изобретения заключается в обеспечении способа и машинной программы для управления скоростью вращения двигателя автомобиля с автоматизированной трансмиссией, когда он приводится в движение, таким образом, что предотвращается излишний износ его сцепления, при этом в то же самое время транспортное средство может легко и плавно трогаться даже тогда, когда требуется большая величина крутящего момента, как при отправлении на подъеме.
Сущность изобретения
Эти и другие задачи, указанные в описании, изложенном ниже, достигаются при помощи способа управления скоростью вращения двигателя при приведении транспортного средства в движение, устройства для управления скоростью вращения двигателя при приведении транспортного средства в движение, автомобилем, машинной программой и машинным программным продуктом, как упомянуто выше, которые дополнительно демонстрируют, соответственно, признаки, указанные в отличительных частях независимых пунктов 1, 11, 20, 21, 22 и 23 прилагаемой формулы изобретения. Предпочтительные варианты осуществления способа и устройства определены в зависимых пунктах 2-10 и 12-19 прилагаемой формулы изобретения.
Согласно изобретению, задачи достигаются при помощи способа управления скоростью вращения двигателя для автомобиля с автоматической трансмиссией во время включения сцепления транспортного средства, когда упомянутое транспортное средство приводится в движение, содержащего этапы, на которых
- запрашивают желаемый крутящий момент сцепления;
- определяют текущий крутящий момент сцепления и замыкающую частоту для сцепления во время его включения;
- определяют увеличение динамического крутящего момента, требуемое для обеспечения увеличения скорости вращения двигателя, требуемого при включении сцепления на упомянутой частоте замыкания;
- определяют на основе параметров, содержащих упомянутый текущий крутящий момент сцепления и увеличение динамического крутящего момента, необходимый крутящий момент двигателя для достижения упомянутого запрашиваемого крутящего момента сцепления;
- определяют по упомянутому необходимому крутящему моменту двигателя необходимую скорость вращения двигателя для достижения упомянутого запрашиваемого крутящего момента сцепления и
- повышают скорость вращения двигателя до необходимой скорости вращения двигателя, если необходимая скорость вращения двигателя больше заданной скорости вращения двигателя.
Таким образом предотвращается излишний износ сцепления транспортного средства, причем в то же самое время транспортное средство может легко и плавно трогаться, когда требуется большая величина крутящего момента, как при приведении транспортного средства в движение на подъеме, так что износ сцепления происходит только тогда, когда необходимо.
Согласно варианту осуществления способ содержит этап, на котором повторяют упомянутые этапы пока сцепление пробуксовывает, позволяя тем самым удовлетворительно осуществлять способ на протяжении всего процесса приведения транспортного средства в движение.
Согласно варианту осуществлению способа параметры на этапе определения необходимого крутящего момента двигателя дополнительно содержат запас по крутящему моменту, который больше потенциально возможной ошибки определения крутящего момента двигателя. Таким образом учитываются возможные ошибки сообщения крутящего момента двигателя.
Согласно варианту осуществления способа увеличение крутящего момента сцепления, т.е. частота замыкания сцепления, откалибровано таким образом, что существует наибольшая частота, при которой сцепление может быть замкнуто. Это выгодно в случае электрогидравлических систем сцепления, в которых сцепление может легко и быстро управляться электронным блоком управления.
Согласно варианту осуществления способа этап определения увеличения динамического крутящего момента двигателя содержит этапы, на которых определяют на основе производной крутящего момента сцепления производную крутящего момента двигателя; определяют производную скорости вращения двигателя по производной крутящего момента двигателя, при этом упомянутое увеличение динамического крутящего момента двигателя определяют на основе момента инерции двигателя и упомянутой производной скорости вращения двигателя.
Согласно варианту осуществления способа этап определения необходимой скорости вращения двигателя выполняется посредством отношения крутящего момента к скорости вращения, заданного для двигателя. Таким образом, процесс приведения транспортного средства в движение включает в себя использование отношения крутящего момента к скорости вращения, которое известно для конкретного двигателя, следовательно, крутящий момент двигателя сильно зависит от скорости вращения двигателя, и крутящего момента двигателя, который прикладывается, являющегося, согласно варианту, наибольшим крутящим моментом двигателя относительно скорости вращения двигателя, а согласно альтернативному варианту - установленным желаемым крутящим момент двигателя относительно скорости вращения двигателя.
Согласно варианту осуществления способа этап определения производной скорости вращения двигателя выполняется на основе отношения крутящего момента к скорости вращения, заданного для двигателя. Во время процесса приведения транспортного средства в движение использование отношения крутящего момента к скорости вращения, которое известно для конкретного двигателя, следовательно, крутящий момент двигателя сильно зависит от скорости вращения двигателя, и крутящего момента двигателя, который прикладывается, являющегося, согласно варианту, наибольшим крутящим моментом двигателя относительно скорости вращения двигателя, а согласно альтернативному варианту - установленным желаемым крутящим моментом двигателя относительно скорости вращения двигателя, облегчает нахождение производной скорости вращения двигателя путем взятия производной скорости вращения двигателя относительно крутящего момента двигателя.
Согласно варианту осуществления способа этап определения текущего крутящего момента сцепления содержит этап, на котором обнаруживают упомянутый крутящий момент сцепления посредством датчика крутящего момента сцепления, что приводит к сравнительно точному значению крутящего момента сцепления.
Согласно варианту осуществления способа этап определения текущего крутящего момента сцепления содержит этап, на котором моделируют крутящий момент сцепления с помощью входных данных о сцеплении. Преимущество моделирования крутящего момента сцепления состоит в том, что не требуется никакого датчика, так как крутящий момент сцепления для различных положений сцепления известен заранее. Это с выгодой используется при низком крутящем моменте.
Согласно варианту осуществления способа этап определения текущего крутящего момента сцепления содержит этап, на котором рассчитывают крутящий момент сцепления по крутящему моменту двигателя и моменту инерции двигателя и увеличению скорости вращения двигателя. Преимущество заключается в том, что не требуется никакого датчика. Это лучше подходит для более высокого крутящего момента, при котором ошибки сообщения/определения крутящего момента TE двигателя не оказывают такого же влияния, как при низком крутящем моменте. Таким образом, этот вариант осуществления и вариант осуществления, в котором крутящий момент сцепления моделируется, могут быть с пользой объединены, при этом крутящий момент сцепления будет моделироваться при сравнительно низком крутящем моменте двигателя и будет определяться с помощью крутящего момента двигателя при сравнительно более высоком крутящем моменте двигателя.
Эти задачи также достигаются с помощью устройства для управления скоростью вращения двигателя для автомобиля с автоматической трансмиссией во время включения сцепления транспортного средства при приведении упомянутого транспортного средства в движение, причем устройство содержит признаки по п.11. Преимущественные варианты осуществления устройства согласно изобретению указаны в зависимых пунктах 12-19 формулы изобретения.
Эти задачи достигаются также автомобилем, который содержит признаки по п.20 и которым может быть грузовик, автобус или легковой автомобиль.
Эти задачи также достигаются при помощи машинной программы для управления скоростью вращения двигателя для автомобиля с автоматической трансмиссией во время включения сцепления транспортного средства, когда упомянутое транспортное средство приводится в движение, причем машинная программа содержит программный код, хранимый на машиночитаемой среде, для выполнения этапов способа по п.п.1-10 и запускается на электронном блоке управления или другой вычислительной машине, соединенной с электронным блоком управления.
Эти задачи, кроме того, достигаются с помощью машинного программного продукта, который содержит программный код, хранимый на машиночитаемой среде, для выполнения этапов способа по п.п.1-10 и запускается на электронном блоке управления или другой вычислительной машине, соединенной с электронным блоком управления.
Эти задачи достигаются, вдобавок, при помощи машинного программного продукта, хранимого непосредственно во внутренней памяти в электронном блоке управления или другой вычислительной машине, соединенной с электронным блоком управления, и содержащего машинную программу для выполнения этапов способа по п.п.1-10, причем машинная программа запускается на вычислительной машине.
Описание чертежей
Настоящее изобретение станет более понятным со ссылкой на последующее подробное описание, читаемое вместе с прилагаемыми чертежами, на которых одинаковые ссылочные обозначения относятся к подобным частям на всех видах и на которых
фиг.1 схематично иллюстрирует автомобиль согласно варианту осуществления изобретения;
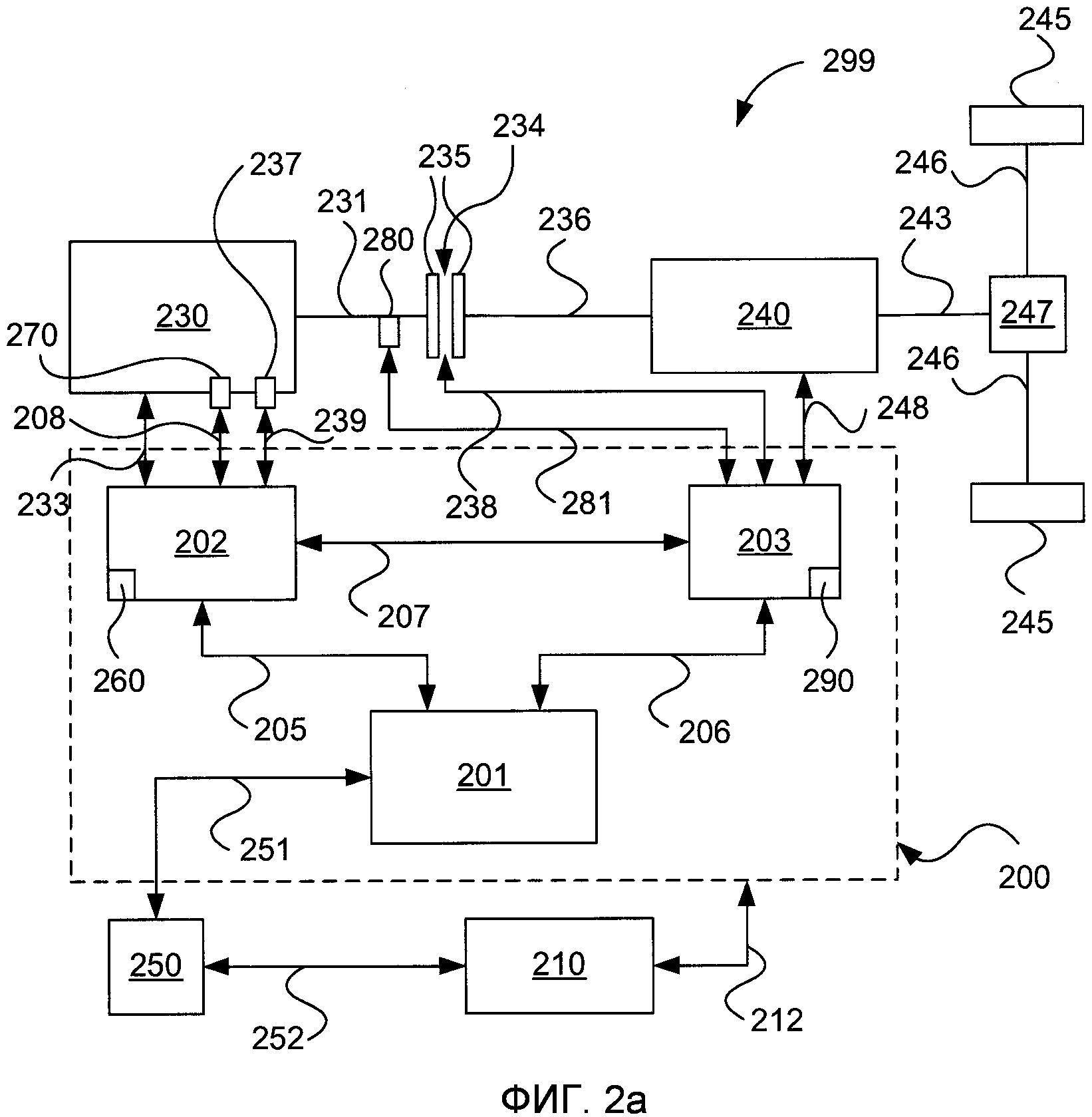
фиг.2a схематично иллюстрирует подсистему транспортного средства, изображенного на фиг.1, согласно варианту осуществления изобретения;
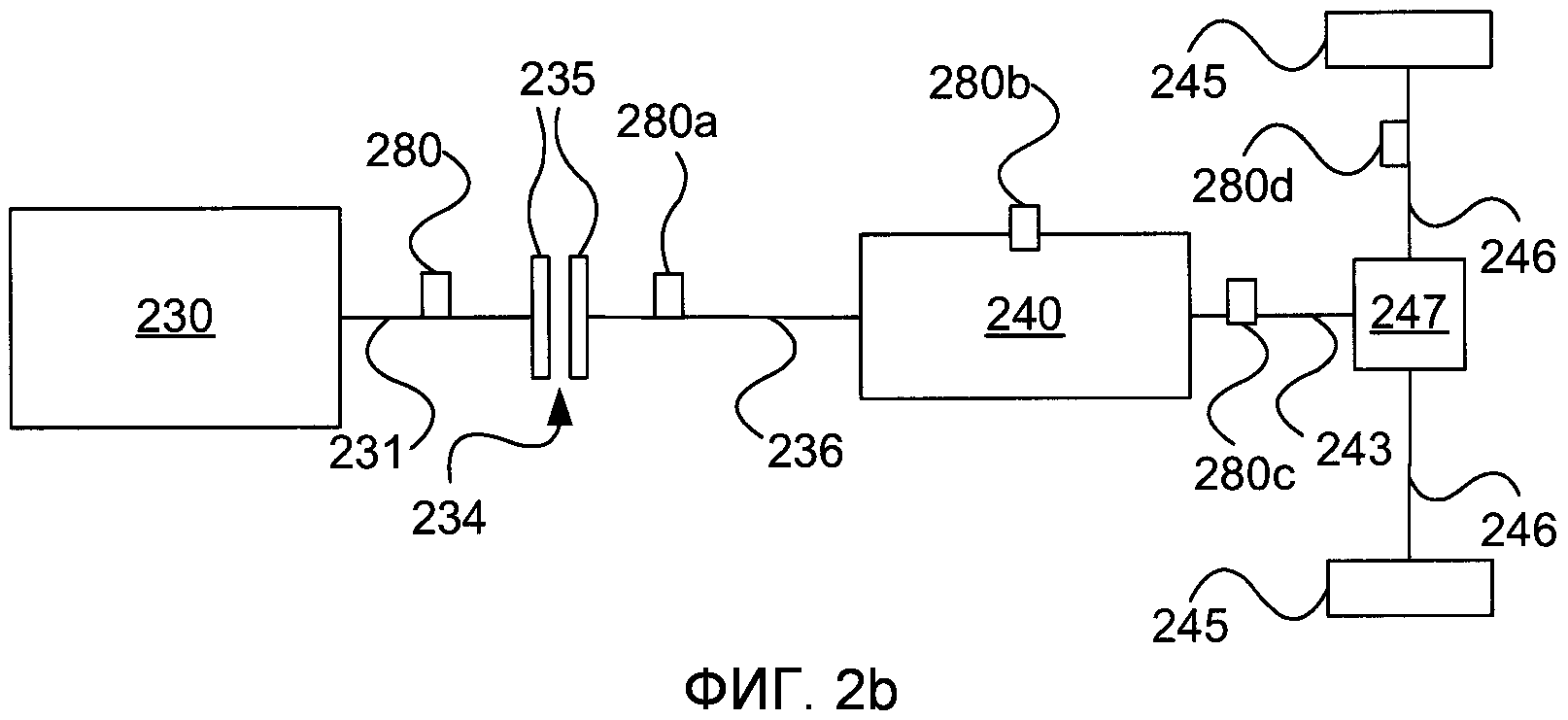
фиг.2b схематично иллюстрирует цепь привода транспортного средства с альтернативными расположениями датчика крутящего момента согласно вариантам осуществления изобретения;
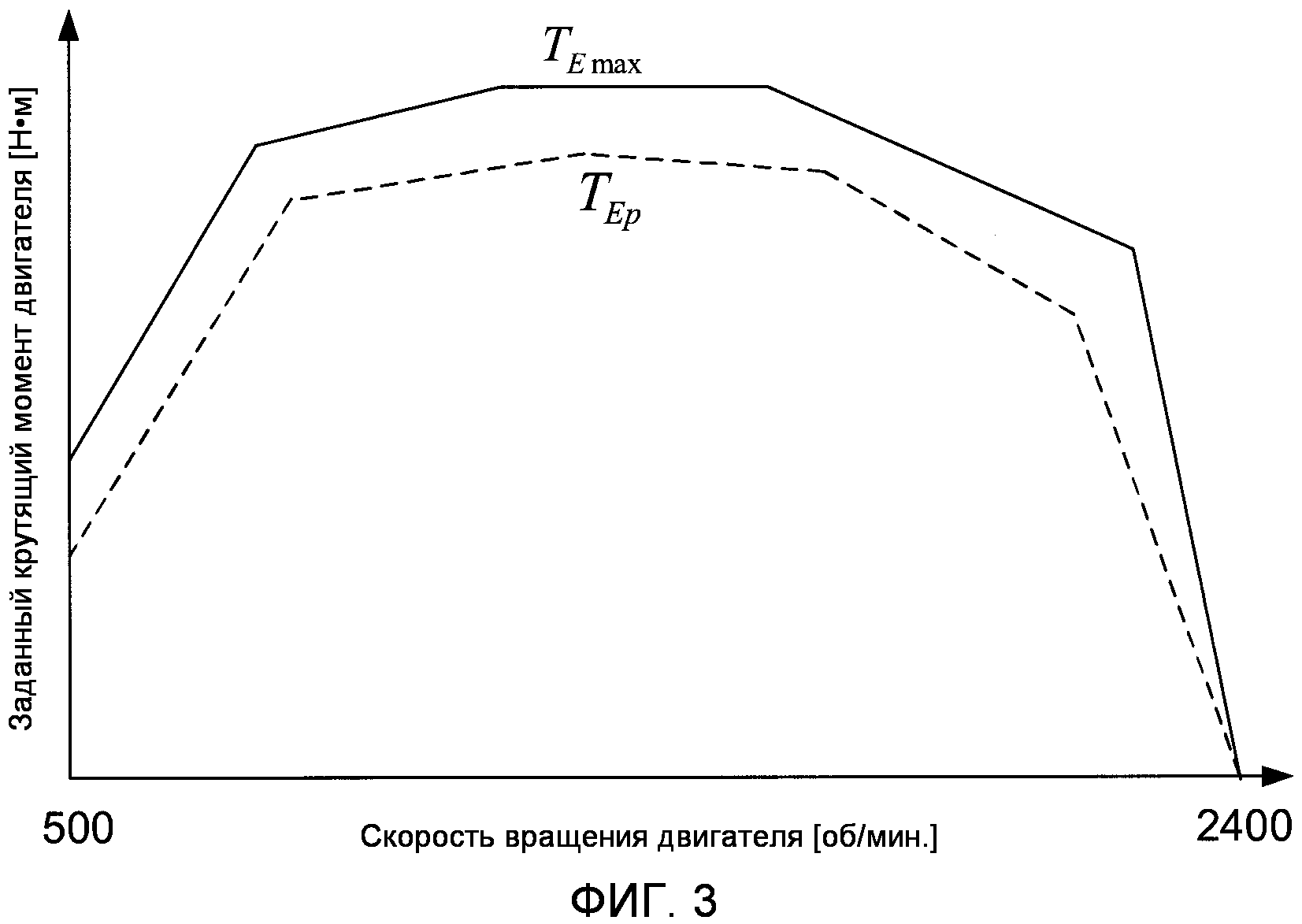
фиг.3 схематично иллюстрирует заданный крутящий момент двигателя в зависимости от скорости вращения двигателя для автомобиля, изображенного на фиг.1, согласно варианту осуществления изобретения;
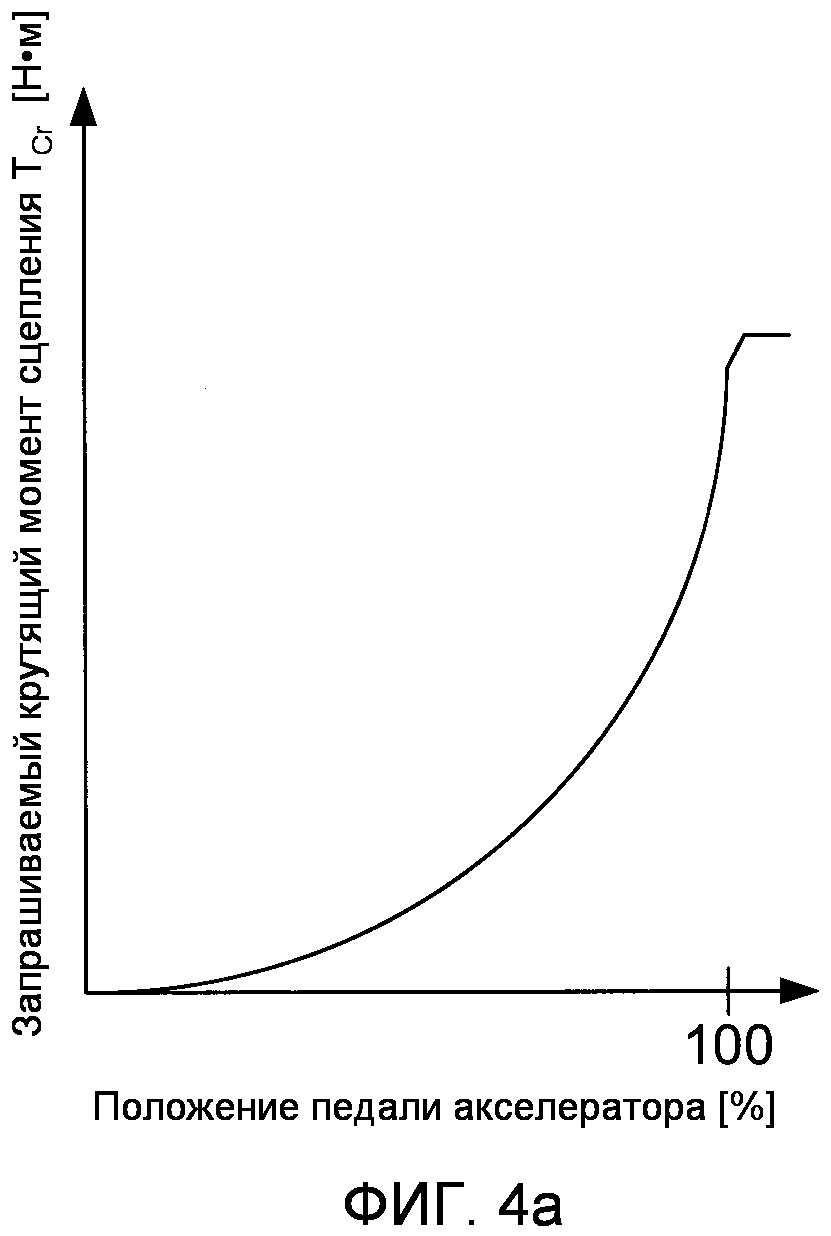
фиг.4a схематично иллюстрирует запрашиваемый крутящий момент сцепления в зависимости от положения педали акселератора для автомобиля, изображенного на фиг.1, согласно варианту осуществления изобретения;
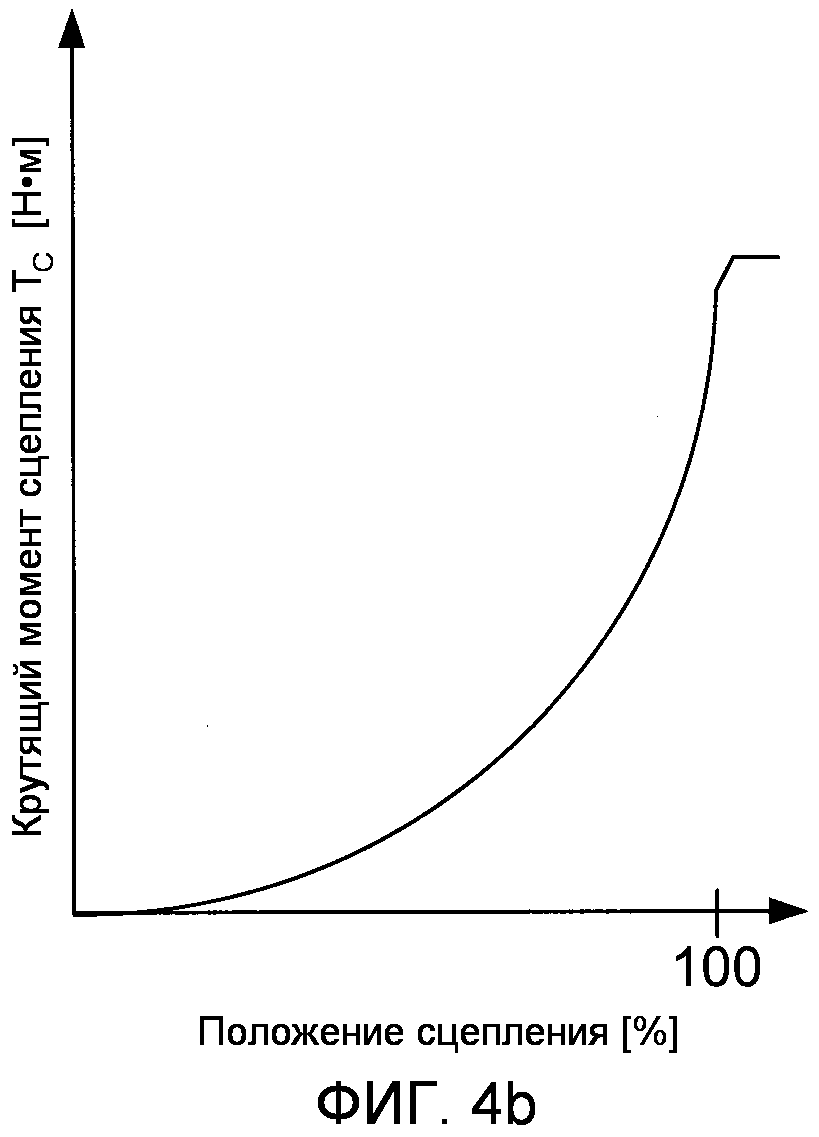
фиг.4b схематично иллюстрирует запрашиваемый крутящий момент сцепления в зависимости от положения сцепления для автомобиля, изображенного на фиг.1, согласно варианту осуществления изобретения;
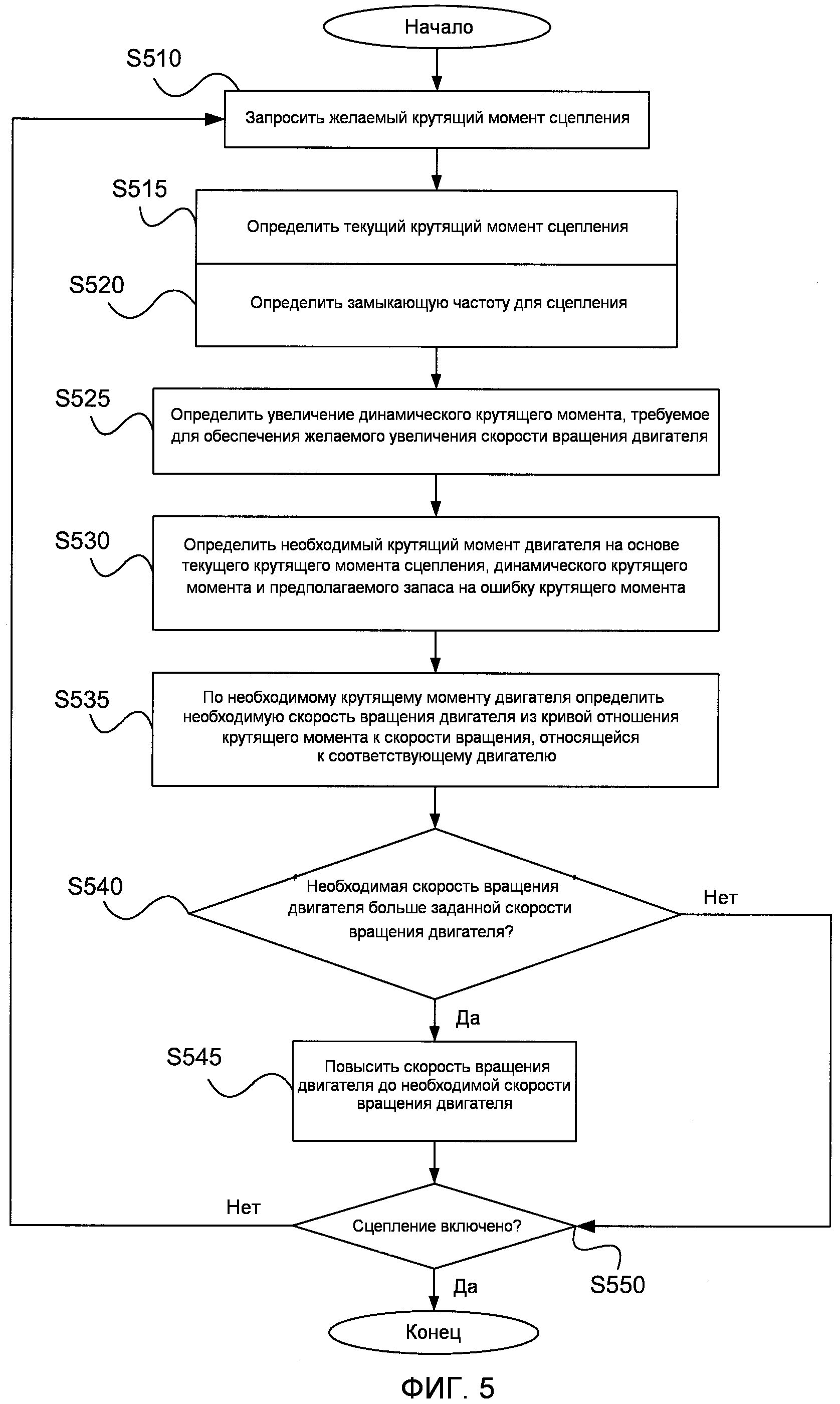
фиг.5 схематично иллюстрирует блок-схему последовательности операций способа согласно варианту осуществления изобретения;
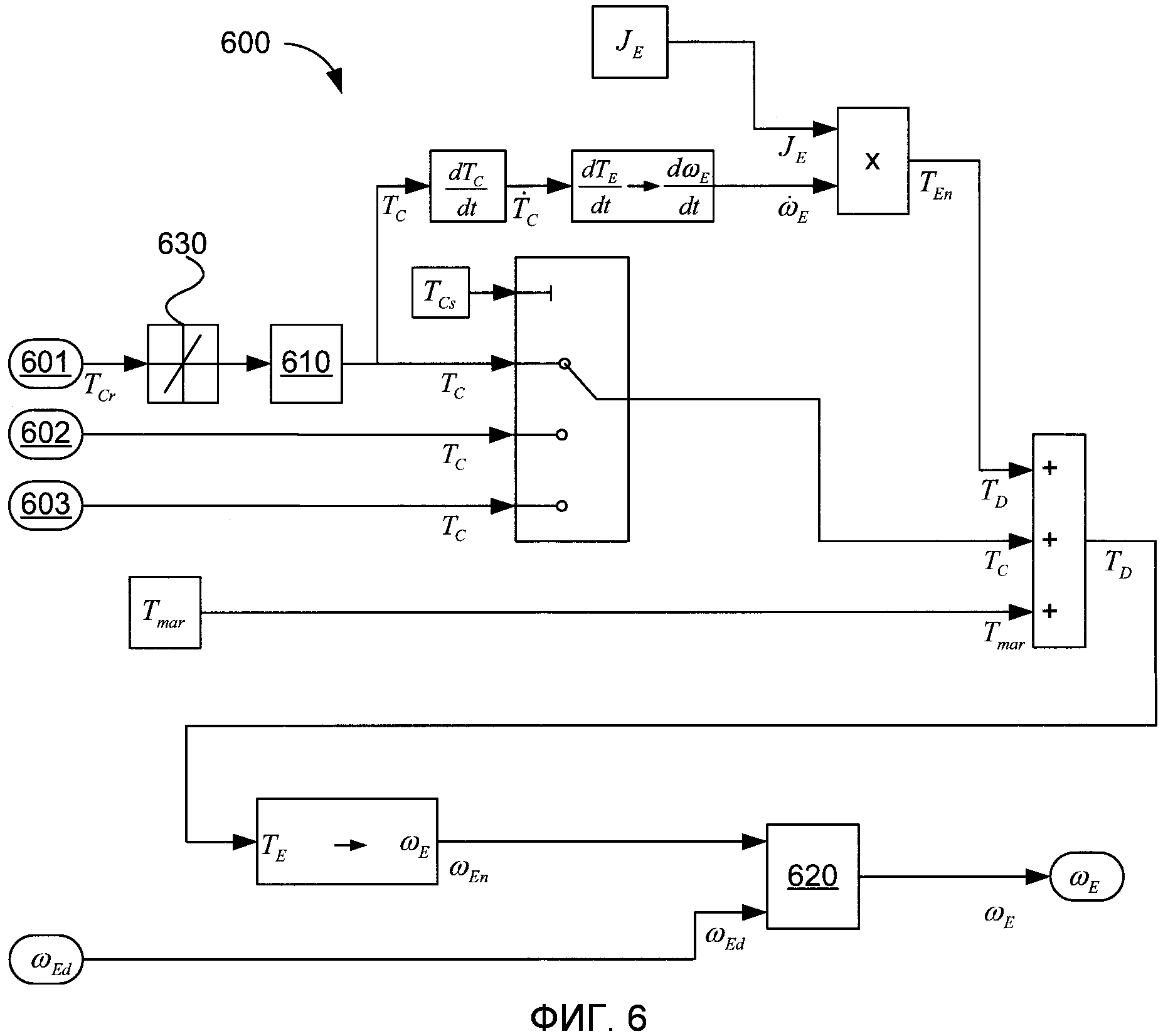
фиг.6 схематично иллюстрирует алгоритм согласно варианту осуществления изобретения; и
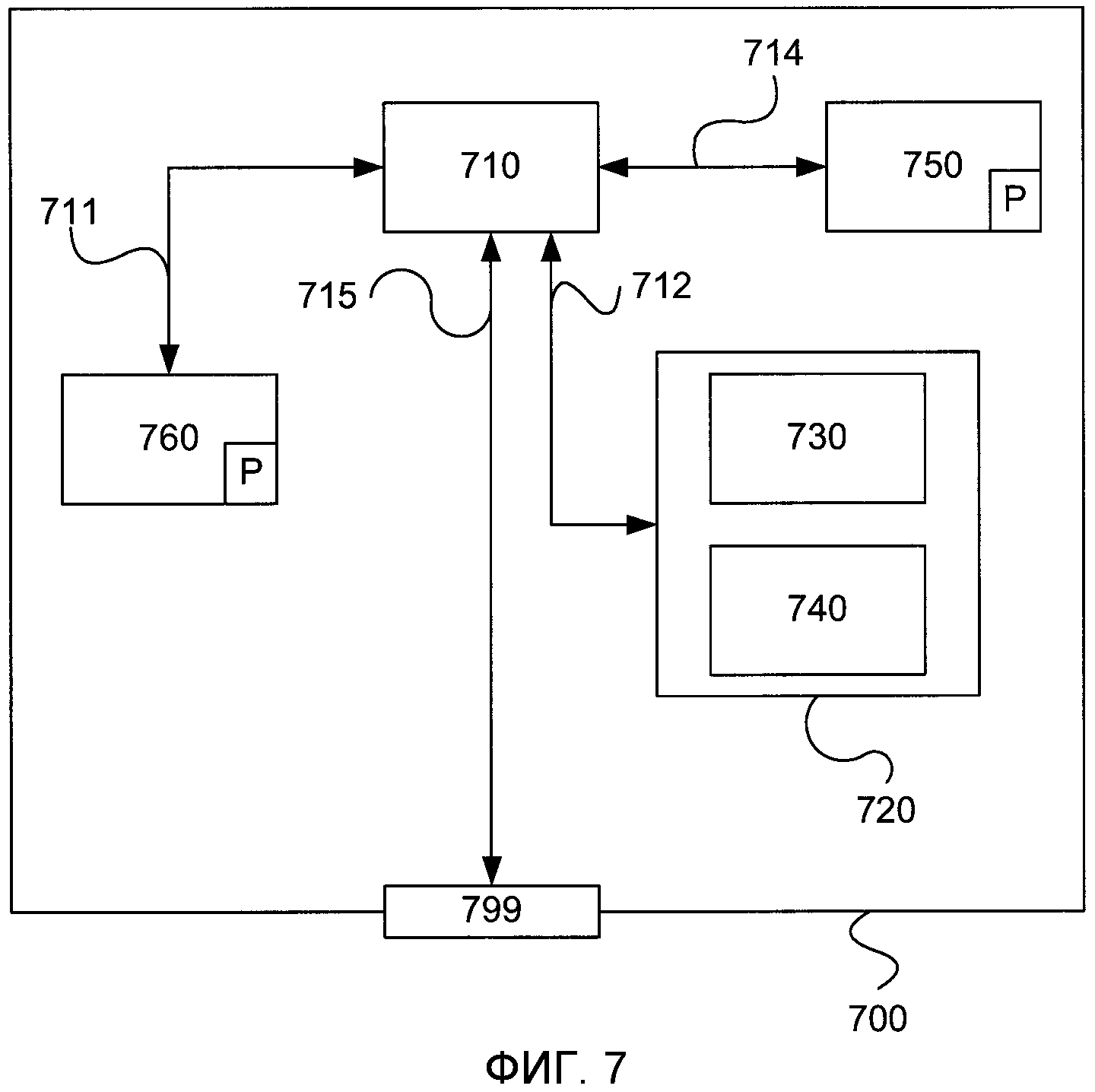
фиг.7 схематично иллюстрирует вычислительную машину согласно варианту осуществления изобретения.
Описание вариантов осуществления
На фиг.1 изображен вид сбоку транспортного средства 100. Приведенное в пример транспортное средство 100 содержит тягач 110 и прицеп 112. Транспортным средством может быть транспортное средство большой грузоподъемности, к примеру грузовик или автобус. Как вариант, транспортным средством может быть легковой автомобиль. Транспортное средство 100 - это автомобиль с автоматизированной трансмиссией.
Термин «канал» относится в этой заявке к каналу связи, которым может быть физическая линия, такая как оптоэлектронная линия связи, или нефизическая линия, такая как беспроводное соединение, например радиоканал или СВЧ-канал.
На фиг.2a изображена подсистема 299 транспортного средства 100. Подсистема 299 находится в тягаче 110. Подсистема 299 содержит цепь привода, включающую в себя двигатель 230, сцепление 235, соединенное с выходным валом 231 двигателя и образующее часть системы 234 сцепления, коробку 240 передач с входным валом 236, соединенным со сцеплением 235, и выходной вал 243, соединенный с ведущими колесами 245 транспортного средства посредством зубчатой передачи 247, например конической зубчатой передачи 247, при этом ведущие колеса 245 соединены с конической зубчатой передачей 247 при помощи карданного вала 246.
Двигателем 230 согласно варианту осуществления изобретения является двигатель внутреннего сгорания. Двигатель внутреннего сгорания согласно варианту осуществления изобретения - это двигатель с шестью цилиндрами. Двигателем внутреннего сгорания согласно варианту осуществления является дизельный двигатель. Согласно другому варианту осуществления двигателем является бензиновый двигатель, а согласно еще одному варианту осуществления, двигатель - это этаноловый двигатель. Согласно другому варианту, двигателем является так называемый двигатель на комбинированном топливе, т.е. он может работать как на этаноле, так и на бензине в желаемом смешении. Двигатель 230 имеет стартер (не изображен), выполненный с возможностью запуска двигателя по запросу от водителя транспортного средства 100.
Подсистема 299 дополнительно содержит рабочее средство 250 мобилизации мощности, например орган управления ускорением, такой как педаль 250 акселератора. Мобилизация мощности может вызываться на основе действия, совершенного водителем, которое соответствует желанию водителя обеспечить транспортному средству мощность, чтобы оно перемещалось. Рабочее средство 250 можно также рассматривать как представление возможности того, что мобилизация мощности может осуществляться на основе, к примеру, сигнала по каналу от какой-нибудь другой подсистемы транспортного средства 100.
Изобретение, в частности, применимо в ситуациях, где транспортное средство неподвижно на дорожной поверхности, а водитель собирается привести транспортное средство в движение и отъехать, используя рабочее средство 250 для мобилизации мощности.
Выходной вал 231 двигателя 230 соединен со сцеплением 235. Сцепление 235, согласно варианту, имеет традиционный дисковый тип, например однодисковое или двухдисковое сцепление. Система 234 сцепления, согласно предпочтительному варианту, является гидравлической, преимущество которой состоит в легкости быстрого и точного управления посредством электронного блока управления. Как вариант система сцепления может быть пневматической. Сцепление 235 в системе сцепления также соединено с входным валом 236 коробки 240 передач. Выходной вал 243 коробки 240 передач выполнен с возможностью передачи традиционным образом мощности через коническую зубчатую передачу ряду колес 245 транспортного средства. Сцепление 235 выполнено с возможностью прерывания передачи мощности в цепи привода.
Конкретный момент инерции JE двигателя 230 известен из технических расчетов, в которых, согласно варианту, он вычисляется при помощи 3D моделей. По этой причине момент инерции JE для конкретного двигателя является известным параметром.
Подсистема 299 содержит первый блок 201 управления. Первый блок 201 управления соединен для подачи сигналов посредством канала 251 с рабочим средством 250 для мобилизации мощности. Водитель транспортного средства, используя рабочее средство 250, может запрашивать крутящий момент от двигателя. Согласно варианту осуществления, параметр момента инерции запрограммирован как константа в первом блоке 201 управления, втором блоке 202 управления и третьем блоке 203 управления.
Подсистема 299 содержит второй блок 202 управления, который, согласно версии, выполнен с возможностью управления двигателем 230 посредством канала 233. Для этого второй блок 202 управления соединен для подачи сигналов с рабочим средством (не изображено), например инжекционными клапанами для впрыска топлива в цилиндры двигателя. Второй блок 202 управления выполнен с возможностью управления скоростью ωE вращения двигателя и крутящим моментом TE двигателя. Подразумевается, что скорость вращения двигателя управляется регулятором 260 скорости вращения двигателя, расположенным во втором блоке управления. То, что регулятор 260 скорости вращения двигателя расположен во втором блоке управления, обеспечивает быстрое управление скоростью вращения двигателя, поскольку нет необходимости в канале связи типа CAN (Controller Area Network). За исключением заданного значения все сигналы во втором блоке управления, используемые регулятором 260, являются внутренними, позволяя тем самым оптимизировать скорость регулятора 260 скорости вращения двигателя. Регулятор скорости вращения двигателя можно в качестве варианта располагать вне второго блока управления любым желаемым образом с возможностью управления скоростью вращения двигателя.
Мгновенный крутящий момент TE двигателя 230 может традиционным образом устанавливаться вторым блоком 202 управления. Крутящий момент TE двигателя указан в Нм. Установление крутящего момента TE, создаваемого двигателем, непрерывно выполняется в блоке 202 управления. Установление крутящего момента TE, создаваемого двигателем 230, может осуществляться исходя из количества топлива, подаваемого в камеры внутреннего сгорания двигателя 230. Как вариант, крутящий момент двигателя 230 можно обнаруживать посредством подходящего датчика 237, который выполнен с возможностью посылки по каналу 239 блоку 202 управления сигнала, содержащего в себе информацию о мгновенном значении крутящего момента TE двигателя.
Подсистема 299 дополнительно содержит третий блок 203 управления, который, согласно версии, выполнен с возможностью управления сцеплением 235 посредством канала 238 и управления коробкой 240 передач посредством канала 248. Согласно варианту, третий блок 203 управления выполнен с возможностью управления положением сцепления 235 при помощи регулятора 290 сцепления, расположенного в третьем блоке 203 управления. Регулятор сцепления можно в качестве варианта располагать вне третьего блока управления любым желаемым образом с возможностью управления положением сцепления.
Согласно варианту, наибольшая частота замыкания для сцепления 235 калибруется до желаемой частоты замыкания. Поэтому третий блок 203 управления выполнен с возможностью управления частотой замыкания на основе упомянутой калибровки. Калибровка частоты замыкания сцепления относится к производной крутящего момента  c сцепления. Таким образом, изменение крутящего момента Tc сцепления во время приведения транспортного средства в движение известно. Поэтому наибольшая частота замыкания для сцепления калибруется таким образом, что откалиброванное замыкание осуществляется, если водитель использует педаль акселератора для запроса более быстрого замыкания. Если водитель использует педаль акселератора для запроса более медленного, чем наибольшая частота замыкания, замыкания сцепления, то сцепление замкнется медленно в соответствии с запросом.
c сцепления. Таким образом, изменение крутящего момента Tc сцепления во время приведения транспортного средства в движение известно. Поэтому наибольшая частота замыкания для сцепления калибруется таким образом, что откалиброванное замыкание осуществляется, если водитель использует педаль акселератора для запроса более быстрого замыкания. Если водитель использует педаль акселератора для запроса более медленного, чем наибольшая частота замыкания, замыкания сцепления, то сцепление замкнется медленно в соответствии с запросом.
Первый блок 201 управления обеспечен связью со вторым блоком 202 управления посредством канала 205 и связью с третьим блоком 203 управления посредством канала 206. Первый блок 201 управления выполнен с возможностью сообщения положений рабочего средства 250 мобилизации мощности, например положений педали акселератора.
Второй блок 202 управления обеспечен связью с третьим блоком 203 управления через канал 207. Рядом с двигателем 230 для обнаружения скорости вращения двигателя предусмотрен датчик 270 скорости вращения двигателя, а второй блок 202 управления выполнен с возможностью приема от датчика 270 скорости вращения двигателя по каналу 208 сигнала, представляющего собой данные о скорости вращения двигателя. Второй блок 202 управления выполнен с возможностью обработки упомянутых данных о скорости вращения двигателя, чтобы, среди прочего, определять ускорение  E двигателя, т.е. производную скорости ωE вращения двигателя. Второй блок 202 управления выполнен с возможностью посылки третьему блоку 203 управления сигнала, представляющего собой крутящий момент TE двигателя, и сигнала, представляющего собой скорость ωE вращения двигателя.
E двигателя, т.е. производную скорости ωE вращения двигателя. Второй блок 202 управления выполнен с возможностью посылки третьему блоку 203 управления сигнала, представляющего собой крутящий момент TE двигателя, и сигнала, представляющего собой скорость ωE вращения двигателя.
На основе положений рабочего средства/педали 250 акселератора, т.е. исходя из мощности, запрашиваемой водителем при помощи рабочего средства 250, второй блок 202 управления выполнен с возможностью определения запрашиваемого крутящего момента TCr сцепления. Мощность, которой управляют при помощи рабочего средства 250, - это мощность, которой, возможно, посредством зубчатой передачи, приводятся колеса 245 транспортного средства. Мощность равна, по существу, передаточному отношению, умноженному на крутящий момент Tc сцепления. Таким образом, мощностью можно управлять через управление крутящим моментом Tc сцепления. Как вариант, третий блок 203 управления может быть выполнен с возможностью определения текущего крутящего момента Tc сцепления, исходя из положения педали акселератора (запрашиваемого крутящего момента TCr сцепления). Запрашиваемый крутящий момент TCr сцепления во многих случаях приближается к крутящему моменту Tc сцепления.
В качестве варианта или дополнения, крутящий момент Tc сцепления рассчитывают по крутящему моменту TE двигателя, как будет подробнее объяснено в отношении способа, описанного со ссылкой на фиг.5.
В качестве варианта или дополнения, крутящий момент Tc сцепления можно устанавливать с помощью датчика 280 крутящего момента сцепления, выполненного с возможностью обнаружения крутящего момента Tc сцепления. Вследствие этого подсистема 299 содержит, согласно варианту, датчик 280 крутящего момента сцепления, выполненный с возможностью обнаружения крутящего момента Tc сцепления. Третий блок 203 управления выполнен с возможностью приема по каналу 281 от датчика 280 крутящего момента сцепления сигнала, представляющего собой данные о крутящем моменте сцепления. Как вариант, первый блок 201 управления или второй блок 202 управления могут быть выполнены с возможностью приема от датчика 280 крутящего момента сцепления сигналов, представляющих собой данные о крутящем моменте сцепления. На фиг.2b изображены различные местоположения датчика для обнаружения крутящего момента Tc сцепления.
Согласно варианту, первый, второй и третий блоки управления содержатся в блоке 200 управления, изображенном прерывистой линией на фиг.2a. Как вариант, каждый из первого, второго и третьего блоков управления принимает вид блока управления с соответствующими функциями и выполнен с возможностью осуществления соответствующего управления. Также, для распределения упомянутых функций, возможны другие варианты блоков управления.
Четвертый блок 210 управления обеспечен связью с первым, вторым и третьим блоками управления посредством каналов, представленных здесь каналом 212 к блоку 200 управления. Четвертый блок 210 управления может быть соединен с возможностью отсоединения с блоком 200 управления. Четвертым блоком 210 управления может быть блок управления внешний по отношению к транспортному средству 100. Четвертый блок 210 управления может быть выполнен с возможностью выполнения этапов новаторского способа согласно изобретению. Четвертый блок 210 управления может использоваться для переноса в блок 200 управления программного обеспечения, в частности программного обеспечения для управления скоростью вращения двигателя автомобиля с автоматической трансмиссией во время включения сцепления при приведении упомянутого транспортного средства в движение. Четвертый блок 210 управления может в качестве варианта быть обеспечен связью с блоком 200 управления посредством внутренней сети в транспортном средстве.
Четвертый блок 210 управления обеспечен связью с рабочим средством 250 через канал 252.
На фиг.2b изображена цепь привода транспортного средства по фиг.1 с альтернативными расположениями датчика крутящего момента сцепления.
Цепь привода содержит двигатель 230, сцепление 235, соединенное с выходным валом 231 двигателя и образующее часть системы 234 сцепления, коробку 240 передач с входным валом 236, соединенным со сцеплением 235, и выходной вал 243, соединенный с ведущими колесами 245 транспортного средства посредством конической зубчатой передачи 247, при этом ведущие колеса 245 соединены с конической зубчатой передачей 247 при помощи карданного вала 246.
Согласно варианту датчик 280 крутящего момента сцепления находится рядом с выходным валом 231 двигателя 230, как также изображено на фиг.2a.
Согласно варианту датчик 280a крутящего момента сцепления расположен рядом с входным валом 236 коробки 240 передач.
Согласно варианту, датчик 280b крутящего момента сцепления находится рядом с коробкой передач, и любая передача должна учитываться.
Согласно варианту, датчик 280c крутящего момента сцепления находится рядом с выходным валом 243 коробки 240 передач, и любая передача должна учитываться.
Согласно варианту, датчик 280d крутящего момента сцепления находится рядом с карданным валом 246 ведущих колес 245, и любая передача должна учитываться.
Независимо от своего положения датчик 280; 280a; 280b; 280c; 280d выполнен с возможностью обнаружения крутящего момента и посылки сигналов, представляющих собой данные о крутящем моменте сцепления, блоку 200; 201; 202; 203 управления, который, согласно варианту осуществления, принимает форму третьего блока 203 управления. Согласно возможному варианту осуществления, датчик 280; 280a; 280b; 280c; 280d выполнен с возможностью непрерывной посылки блоку 200; 201; 202; 203 управления сигналов, которые содержат в себе информацию об относительном мгновенном крутящем моменте Tc сцепления 235. Блок 200; 201; 202; 203 управления может на основе этих сигналов вычислять крутящий момент Tc сцепления и увеличение
c крутящего момента сцепления.
Согласно вышеупомянутым примерам расположения, могут быть обеспечены один или несколько датчиков, а вариант позволяет использовать два либо больше датчиков 280 крутящего момента сцепления для посылки блокам управления сигналов, которые содержат в себе информацию об относительном мгновенном крутящем моменте сцепления, т.е. текущем крутящем моменте сцепления, обеспечивая тем самым возможность статистически более точных значений упомянутого крутящего момента сцепления.
В этой заявке, согласно примеру изобретения, новаторский способ запускается и управляется первым блоком 201 управления, вторым блоком 202 управления и третьим блоком 203 управления. Как вариант, новаторский способ запускается и управляется внешним электронным блоком 210 управления.
На фиг.3 изображен наибольший крутящий момент TEmax двигателя и более низкий откалиброванный крутящий момент TEcal двигателя, который отличается от наибольшего крутящего момента, в зависимости от скорости ωE вращения двигателя 230 во время приведения в действие автомобиля 100, изображенного на фиг.1, согласно варианту осуществления изобретения. На такую кривую ссылаются на фиг.2a и фиг.5.
Сплошная линия представляет наибольший крутящий момент TEmax двигателя в зависимости от скорости ωE вращения двигателя, т.е. наибольший крутящий момент, который может обеспечивать двигатель при конкретной скорости вращения двигателя, называемой здесь кривой наибольшего крутящего момента.
Прерывистая линия представляет более низкий крутящий момент TEp двигателя, установленный для того же двигателя, в зависимости от скорости ωE вращения двигателя. Возможную прерывистую кривую получают перекалибровкой кривой наибольшего крутящего момента. Результатом является другое увеличение скорости вращения двигателя при приведении транспортного средства в движение, чем в случае, представленном сплошной кривой, которая представляет собой наибольший крутящий момент двигателя 230 в зависимости от скорости вращения двигателя, когда транспортное средство приводится в движение. Поскольку установленный более низкий крутящий момент двигателя относительно скорости вращения двигателя имитирует менее мощный двигатель 230, результат заключается в более раннем увеличении скорости вращения двигателя. Преимущество состоит в том, что это позволяет менять ощущение, испытываемое при оперировании рабочим средством/педалью 250 акселератора, так что обеспечивается более сильное ощущение, т.е. когда прикладывается ускорение, скорость вращения двигателя увеличивается быстрее.
Как проиллюстрировано на фиг.3, кривые крутящего момента TEmax, TEp двигателя сильно зависят от скорости вращения двигателя в пределах диапазона скорости вращения двигателя, который используется при приведении транспортного средства в движение. Чтобы двигатель 230 был управляем на основе скорости вращения двигателя, когда транспортное средство приводится в движение, и сцепление 235 нагружает двигатель высоким крутящим моментом Tc сцепления, должен быть избыточный крутящий момент, который мог бы использоваться регулятором 260 скорости вращения двигателя. Быстрота регулятора скорости вращения двигателя пропорциональна этому запасу крутящего момента. Чтобы быстро повышать скорость вращения двигателя во время включения сцепления 235, когда транспортное средство приводится в движение, и сцепление 235 нагружает двигатель 230, регулятору скорости вращения двигателя для осуществления повышения скорости вращения двигателя требуется большая величина крутящего момента. Для быстрого включения сцепления скорость вращения двигателя должна быть повышена больше, чем для медленного включения сцепления, при том же самом крутящем моменте. Дополнительное требование состоит в том, что для быстрого включения сцепления 235 скорость вращения двигателя необходимо повышать раньше, чем для медленного включения сцепления, при том же самом крутящем моменте. Крутящий момент, требуемый для осуществления регулятором скорости вращения двигателя этого повышения скорости вращения двигателя, является, соответственно, динамическим и называется в дальнейшем увеличение TD динамического крутящего момента. Когда крутящий момент, соответствующий увеличению TD динамического крутящего момента, достигнут, требуется повышение скорости вращения двигателя.
Двигатель имеет, соответственно, заданное отношение крутящего момента к скорости вращения.
На фиг.4a изображен запрашиваемый крутящий момент TCr сцепления в зависимости от положения рабочего средства/педали 250 акселератора автомобиля, изображенного на фиг.1, согласно варианту осуществления изобретения.
Запрашиваемый крутящий момент TCr сцепления согласно кривой на фиг.4a определяется исходя из положения рабочего средства/педали 250 акселератора, т.е. на основе мощности, запрашиваемой водителем посредством рабочего средства/педали 250 акселератора. То, что кривая возрастает экспоненциально с положением рабочего средства/педали 250 акселератора, так что, когда рабочее средство/педаль 250 акселератора приближается к полной активации, т.е. полностью выжатому (100%) положению, означает, что запрашиваемый крутящий момент TCr сцепления увеличивается быстрее, приводя к определенному ощущению при использовании рабочего средства/педали акселератора 250 для ускорения. Калибровочная кривая может быть любой подходящей формы для желаемого ощущения рабочего средства/педали акселератора и может, согласно варианту, быть линейной.
На фиг.4b изображен крутящий момент Tc сцепления в зависимости от положения сцепления 235 автомобиля, изображенного на фиг.1, согласно варианту осуществления изобретения.
Согласно варианту, крутящий момент сцепления моделируется при помощи входных данных о сцеплении, благодаря осведомленности о конфигурации и характеристиках сцепления, при этом крутящий момент Tc сцепления моделируется на основе положения сцепления путем регулирования положения до определенного положения, причем подразумевается, что положение сцепления должно обнаруживаться в соответствии с графической расчетной кривой, например, согласно фиг.4b, которая представляет собой отношение между положением сцепления и крутящим моментом, передаваемым на сцепление.
На фиг.5 изображена блок-схема последовательности операций способа согласно варианту осуществления изобретения.
Способ содержит первый этап S510 способа, на котором желаемый крутящий момент TCr запрашивается водителем посредством приведения в действие рабочего средства 250, как правило педали акселератора, путем, согласно варианту, выжимания педали акселератора до определенного положения.
Способ содержит второй этап S515 способа, который выполняется на основе первого этапа S510 способа. На этапе S515 для сцепления 235 определяют текущий крутящий момент Tc сцепления, что может быть сделано различными способами.
Согласно варианту осуществления, этап S515 выполняется для определения текущего крутящего момента Tc сцепления путем обнаружения упомянутого крутящего момента сцепления при помощи датчика 280; 280a; 280b; 280c; 280d текущего крутящего момента сцепления, распложенного рядом со сцеплением 235, для упомянутого обнаружения. Расположение датчика для обнаружения текущего крутящего момента сцепления уже было рассмотрено со ссылкой на фиг.2b. Преимущество определения текущего крутящего момента Tc сцепления датчиком состоит в том, что может быть осуществлено сравнительно точное определение.
Согласно варианту осуществления, этап S515 выполняется для определения текущего крутящего момента Tc сцепления посредством моделирования крутящего момента сцепления с помощью входных данных о сцеплении. Для создания модели сцепления 235 используются сведения о конфигурации и характеристиках сцепления, благодаря чему крутящий момент Tc сцепления можно моделировать исходя из положения сцепления. Согласно варианту, крутящий момент Tc сцепления определяют путем регулировки сцепления до определенного положения согласно графической расчетной кривой, которая представляет собой отношение между положением сцепления и крутящим моментом, передаваемым на сцепление. Пример такой кривой изображен на фиг.4b. Преимущество моделирования крутящего момента сцепления состоит в том, что не требуется никакого датчика, так как крутящий момент сцепления для различных положений сцепления известен заранее. Это с выгодой применяется при низком крутящем моменте. Положением сцепления управляет регулятор 290, который направляет сцепление в положение, обеспечивающее запрашиваемый крутящий момент сцепления.
Согласно варианту осуществления, этап S515 выполняется для определения текущего крутящего момента Tc сцепления путем его расчета по крутящему моменту TE двигателя, моменту инерции JM двигателя 230 и увеличению скорости вращения/ускорению
E двигателя, т.е. производной скорости вращения двигателя, посредством вычитания произведения момента инерции JM и увеличения
E скорости вращения двигателя из крутящего момента TE двигателя. Преимущество заключается в том, что не требуется никакого датчика. Это лучше подходит для более высокого крутящего момента, при котором ошибки сообщения/определения крутящего момента TE двигателя не оказывают такого же влияния как при низком крутящем моменте. Таким образом, этот вариант осуществления и вариант осуществления, в котором крутящий момент Tc сцепления моделируется, могут быть с пользой объединены, при этом крутящий момент Tc сцепления будет моделироваться при сравнительно низком крутящем моменте двигателя и будет определяться с помощью крутящего момента двигателя при сравнительно более высоком крутящем моменте двигателя.
Способ содержит третий этап S520 способа, который выполняется на основе первого этапа способа, чтобы определять увеличение крутящего момента
c сцепления, т.е. частоту, на которой включается сцепление 235, замыкающую частоту сцепления 235, которая является производной крутящего момента сцепления. Частота замыкания подгоняется таким образом, что сцепление 235 водится в контакт при надлежащей частоте, так что любое требуемое повышение скорости вращения двигателя достигается прежде, чем достигнут запрашиваемый крутящий момент TCr сцепления. Увеличение крутящего момента
c сцепления можно определять различными способами, например, во многих случаях его можно с выгодой аппроксимировать с помощью запрашиваемого увеличения
Cr крутящего момента сцепления, которое часто приводит к более устойчивому значению с меньшим шумом. Увеличение
c крутящего момента сцепления будет, как правило, достаточно близко к желаемому увеличению
Cr крутящего момента сцепления, чтобы служить применимым приближением.
Согласно предпочтительному варианту осуществления, запрашиваемое увеличение
Cr крутящего момента сцепления, т.е. запрашиваемая частота замыкания сцепления 235, калибруется таким образом, что существует наибольшая частота, при которой может запрашиваться замыкание сцепления 235. Это выгодно при использовании электрогидравлических систем сцепления, в которых сцепление 235 может легко и быстро управляться электронным блоком управления.
Согласно другому варианту осуществления, запрашиваемое увеличение
c крутящего момента сцепления, т.е. замыкающая частота сцепления 235, калибруется таким образом, что существует наибольшая частота, при которой сцепление 235 может быть замкнуто.
Согласно возможному варианту осуществления, само сцепление 235 может быть сконфигурировано и сконструировано таким образом, что его замыкание вводит его в контакт при определенной желаемой наибольшей частоте. Это, к примеру, применимо для пневматических сцеплений в зависимости от их механической конструкции, характеристики пружины и т.п.
Способ содержит четвертый этап S525 способа, который выполняется после третьего этапа способа, чтобы определять увеличение TD динамического крутящего момента, требуемое для осуществления желаемого увеличения
E скорости вращения двигателя, чтобы обеспечивать запрашиваемое увеличение крутящего момента сцепления.
Динамический крутящий момент TD сцепления получают умножением момента инерции Jм двигателя 230 на ускорение
E двигателя, т.е. увеличение скорости вращения двигателя, которое является производной скорости вращения двигателя. Момент инерции двигателя 230 известен для каждого двигателя 230.
Производную скорости вращения двигателя получают, согласно варианту осуществления, путем рассмотрения увеличения
E крутящего момента двигателя, т.е. производной скорости вращения двигателя, как функции от скорости ωE вращения двигателя, на кривой, которая представляет крутящий момент ТЕ двигателя, заданный для двигателя, причем кривая отношения крутящего момента двигателя к скорости вращения двигателя, согласно варианту, является наибольшим крутящим моментом TEmax двигателя для двигателя при разных скоростях ωE вращения двигателя, а согласно другому варианту - заранее откалиброванной кривой, в силу чего крутящий момент TE двигателя ниже наибольшего крутящего момента TEmax двигателя, что приводит к более раннему увеличению скорости вращения двигателя, так как тогда предполагается, что двигатель 230 менее мощный, чем он есть на самом деле. Пример такой кривой изображен на фиг.3. Увеличение
E крутящего момента двигателя, т.е. производную скорости вращения двигателя, получают, согласно варианту, благодаря тому, что оно такое же, как увеличение
c крутящего момента сцепления.
Способ содержит пятый этап S530 способа, который выполняется после четвертого этап способа, чтобы определять необходимый крутящий момент TEn двигателя для достижения желаемого крутящего момента TCr сцепления.
Необходимый крутящий момент TEn двигателя получают путем сложения вместе избытка TD динамического крутящего момента, текущего крутящего момента Tc сцепления и запаса Tmar на ошибку крутящего момента, при этом запас на ошибку крутящего момента учитывает допуски на ошибки двигателя 230 вследствие, например, искрения и должен предусматривать ошибки сообщения крутящего момента двигателя 230. Запас Tmar на ошибку крутящего момента зависит также от того, как вычисляется увеличение
c крутящего момента сцепления, к примеру аппроксимируется ли увеличение
c крутящего момента сцепления при помощи запрашиваемого увеличения
Cr крутящего момента сцепления, и какие запасы на ошибку это влечет за собой. Согласно варианту, запас Tmar на ошибку крутящего момента постоянен, например 100 Нм. Согласно другому варианту, запас Tmar на ошибку крутящего момента является переменным, например, зависит от скорости вращения двигателя.
Способ содержит шестой этап S535 способа, который выполняется после пятого этапа способа, чтобы определять требуемую скорость ωEn вращения двигателя для достижения запрашиваемого крутящего момента TCr сцепления.
Необходимую скорость вращения двигателя определяют посредством отношения крутящего момента к скорости вращения, заданного для двигателя. Необходимую скорость ωEn вращения двигателя получают по необходимому крутящему моменту TEn двигателя, используя кривую отношения крутящего момента к скорости вращения, относящуюся к двигателю 230, например, согласно фиг.3, из которой можно считать необходимую скорость вращения двигателя.
Способ содержит седьмой этап S540 способа, который выполняется после шестого этапа способа, чтобы сопоставлять необходимую скорость ωEn вращения двигателя для достижения запрашиваемого крутящего момента TCr сцепления с определенной заданной скоростью ωEd вращения двигателя. Этой скоростью вращения двигателя, согласно варианту, является скорость вращения на холостом ходу. Согласно другому варианту, если увеличения скорости вращения двигателя не требуется, то стремятся поддерживать наименьшую откалиброванную скорость вращения двигателя при включении сцепления.
Если необходимая скорость ωEn вращения двигателя ниже заданной скорости ωEd вращения двигателя, то увеличения скорости вращения двигателя не требуется, и избытка мощности будет достаточно, чтобы транспортное средство тронулось.
Если необходимая скорость ωEn вращения двигателя выше заданной скорости ωEd вращения двигателя, то на восьмом этапе S545 способа скорость вращения двигателя будет повышена до необходимой скорости ωEn вращения двигателя.
Способ содержит девятый этап S550 способа, чтобы выяснять включено ли сцепление 235 или нет, т.е. пробуксовывает ли все еще сцепление, состояние, известное, как пробуксовка, или полностью включено, состояние, известное как блокировка.
Если сцепление 235 включено, то процесс приведения транспортного средства в движение был завершен. Если сцепление 235 все еще пробуксовывает, то оно, следовательно, будет по-прежнему в процессе включения, так что способ начнется заново с запрашивания желаемого крутящего момента TCr сцепления. Если вдруг желаемый крутящий момент TCr сцепления уменьшится, то уменьшится необходимая скорость ωEn вращения двигателя, приводя к уменьшению скорости вращения двигателя.
На фиг.6 изображен алгоритм, согласно варианту, осуществления настоящего изобретения. Алгоритм показывает, как исполняется способ согласно изобретению.
Запрашивают крутящий момент TCr сцепления, например, нажатием педали акселератора транспортного средства. Определяют крутящий момент Tc сцепления, что может быть сделано различными способами 601, 602, 603. Первый вариант 601 определения крутящего момента Tc сцепления состоит в моделировании посредством модели 610 крутящего момента сцепления, второй вариант 602 - обнаружении при помощи датчика, а третий вариант 603 - расчете по крутящему моменту двигателя. Эти варианты можно сочетать, причем использовать как альтернативы или вместе. Эти варианты и их сочетания описаны со ссылкой на фиг.3. Какой или какие варианты для определения Tc должны использоваться, может, если есть несколько вариантов для выбора, указываться сигналом от источника TCs крутящего момента сцепления.
Для получения производной  крутящего момента сцепления берут производную
крутящего момента сцепления берут производную крутящего момента Tc сцепления.
крутящего момента Tc сцепления.
То, что производная
сцепления является такой же, как производная  крутящего момента двигателя, позволяет брать производную
E скорости вращения двигателя по кривой отношения крутящего момента к скорости вращения двигателя, например, по фиг.3, как описано со ссылкой на фиг.5, этапе S525 способа.
крутящего момента двигателя, позволяет брать производную
E скорости вращения двигателя по кривой отношения крутящего момента к скорости вращения двигателя, например, по фиг.3, как описано со ссылкой на фиг.5, этапе S525 способа.
Результатом, получаемым умножением момента инерции JE двигателя на производную
E скорости вращения двигателя, является увеличение TD динамического крутящего момента, требуемое для осуществления желаемого увеличения скорости вращения двигателя, чтобы обеспечивать запрашиваемое увеличение крутящего момента сцепления.
Увеличение TD динамического крутящего момента, текущий крутящий момент Tc сцепления и запас Tmar на ошибку крутящего момента, который учитывает ошибочное сообщение крутящего момента двигателя 230, затем складываются вместе, чтобы получать необходимый крутящий момент TEn двигателя, как описано со ссылкой на фиг.5, на этапе S530 способа.
Необходимая скорость ωEn вращения двигателя берется по кривой отношения крутящего момента к скорости вращения двигателя, например, согласно фиг.3, на которой показана скорость вращения двигателя, соответствующая необходимому крутящему моменту TEn двигателя.
Необходимая скорость ωEn вращения двигателя затем сравнивается с заданной скоростью ωEd вращения двигателя, которой, согласно этому примеру, является скорость вращения на холостом ходу.
Если необходимая скорость ωEn вращения двигателя больше заданной скорости ωEd вращения двигателя, то скорость вращения двигателя будет повышена до необходимой скорости ωEn вращения двигателя.
На фиг.7 изображена вычислительная машина согласно варианту осуществления изобретения. Конкретнее, на ней изображена схема версии устройства 700. Устройство 700 содержит в себе, согласно варианту осуществления, первый блок 201 управления, проиллюстрированный на фиг.2a. Устройство 700 содержит в себе, согласно варианту осуществления, второй блок 202 управления, проиллюстрированный на фиг.2a. Устройство 700 содержит в себе, согласно варианту осуществления, третий блок 203 управления, проиллюстрированный на фиг.2a. Устройство 700 содержит в себе, согласно варианту осуществления, блок 200 управления, проиллюстрированный на фиг.2a. Устройство 700 содержит в себе, согласно варианту осуществления, два или более блоков 200, 201, 202, 203 управления, проиллюстрированных на фиг.2a. Устройство 700 содержит в себе, согласно варианту осуществления, внешний блок 210 управления, проиллюстрированный на фиг.2a.
Устройство 700 содержит энергонезависимую память 720, блок 710 обработки данных и память 750 с возможностью считывания и записи. Энергонезависимая память 720 имеет первый элемент 730 памяти, в котором для управления работой устройства 700 хранится машинная программа, например операционная система. Устройство 700 дополнительно содержит контроллер шины, последовательный порт связи, средство ввода-вывода, аналого-цифровой преобразователь, блок ввода и передачи времени и даты, счетчик событий и контроллер прерываний (не изображено). Энергонезависимая память 720 также имеет второй элемент 740 памяти.
Обеспечена машинная программа P, которая содержит подпрограммы для управления скоростью вращения двигателя автомобиля с автоматической трансмиссией во время включения сцепления при приведении упомянутого транспортного средства в движение. Программа P может храниться в исполняемом виде или сжатом виде в памяти 760 и/или в памяти 750 с возможностью считывания и записи.
Блок 710 обработки данных, выполняющий определенную работу, означает блок 710 обработки данных, выполняющий определенную часть программы, которая хранится в памяти 760, или определенную часть программы, которая хранится в памяти 750 с возможностью считывания и записи.
Блок 710 обработки данных может устанавливать связь с портом 799 данных посредством шины 715 данных. Энергонезависимая память 720 выполнена с возможностью связи с блоком 710 обработки данных через шину 712 данных. Обособленная память 760 выполнена с возможностью связи с блоком 710 обработки данных при помощи шины 711 данных. Память 750 с возможностью считывания и записи выполнена с возможностью связи с блоком 710 обработки данных посредством шины 714 данных.
Когда данные принимаются на порту 799 данных, они временно сохраняются во втором участке 740 памяти. Блок 710 обработки данных выполнен с возможностью исполнения кода, как описано выше, когда принятые входные данные временно сохранены. Согласно версии, информационные сигналы, принимаемые на порту 799 данных, содержат в себе информацию, порождаемую, к примеру, рабочим средством 250, регулятором 260 скорости вращения двигателя, регулятором 290 сцепления. Информация относится к запрашиваемому крутящему моменту TCr сцепления, текущему крутящему моменту сцепления, увеличению крутящего момента сцепления (частоте замыкания сцепления), требуемому увеличению динамического крутящего момента, необходимому крутящему моменту двигателя, необходимой скорости вращения двигателя. Таким образом, информация, имеющая значение для осуществления вычислений, согласно новаторскому способу управления скоростью вращения двигателя автомобиля с автоматической трансмиссией во время включения сцепления при приведении упомянутого транспортного средства в движение, может подаваться на порт 799 данных, вычисляться внутри в устройстве 700 и/или сохраняться в памяти 710. Следовательно, информация может использоваться устройством 700 для управления скоростью вращения двигателя автомобиля с автоматической трансмиссией во время включения сцепления при приведении упомянутого транспортного средства в движение.
Части способов, описанных здесь, могут осуществляться устройством 200 при помощи блока 710 обработки данных, который запускает программу, хранимую в памяти 760 или памяти 750 с возможностью считывания и записи. Когда устройством 200 запускается программа, исполняются описанные в этой заявке способы.
Предшествующее описание предпочтительных вариантов осуществления настоящего изобретения предоставлено для иллюстративных и описательных целей. Оно не предназначено быть исчерпывающим или ограничивать изобретение описанными вариантами. Специалисту в данной области техники станут очевидны многочисленные модификации и разновидности. Варианты осуществления были выбраны и описаны для наилучшего объяснения принципов изобретения и их практического применения и, следовательно, обеспечения возможности специалисту в данной области техники понять изобретения для разных вариантов осуществления и с различными модификациями, которые соответствуют предполагаемому использованию.







Соединительное устройство для соединения тормозного диска и ступицы и способ установки
Система для охлаждения и нагревания
Пневматический актуатор и система и способ для его управления
Устройство обратной связи об уклоне
Устройство вала и способ поддерживания вала
Определение характеристик ускорения
Система обратной связи для использования в коробке передач транспортного средства
Способ возвращения регулирования крутящего момента из ограниченного состояния в неограниченное состояние
Способ и устройство для определения состояния коробки передач, а также автотранспортное средство, содержащее такое устройство
Система и устройство, содержащие объединенные конденсатор и испаритель
Соединительное устройство для соединения тормозного диска и ступицы и способ установки
Система для охлаждения и нагревания
Пневматический актуатор и система и способ для его управления
Устройство обратной связи об уклоне
Устройство вала и способ поддерживания вала
Определение характеристик ускорения
Система обратной связи для использования в коробке передач транспортного средства
Способ возвращения регулирования крутящего момента из ограниченного состояния в неограниченное состояние
Способ для улучшения характеристики моторного транспортного средства
Способ и устройство для определения состояния коробки передач, а также автотранспортное средство, содержащее такое устройство

