Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к устройству управления приводом электродвигателя для приведения в движение синхронного электродвигателя, содержащего в роторе постоянный магнит (далее - электродвигатель), без использования датчика, определяющего положения магнитного полюса, и, более конкретно, к устройству управления приводом электродвигателя для приведения в движение электродвигателя в широком диапазоне частот вращения, от низкой до высокой частоты, без изменения во времени выходного напряжения цепи привода.
Предшествующий уровень техники
Обычно для приведения в движение электродвигателя такого типа, используя широтно-импульсную модуляцию, генерируют и подают напряжение псевдосинусоидальной формы волны, и используют мгновенные величины полученного синусоидального тока, поданного напряжения и параметрическую модель электродвигателя, и путем перерасчета из параметрической модели получают величину тока на выходе модели и приложенное напряжение на выходе модели, и проводят расчет по обратной связи таким образом, чтобы модулировать оценочную информацию о фазе до тех пор, пока ошибка на выходе модели не станет равной нулю, тем самым оценивая положение магнитного полюса (см., например, ссылку 1: Collected Papers of Society of Electric Engineers, D, том 117, № 1, 1997, стр.98-104).
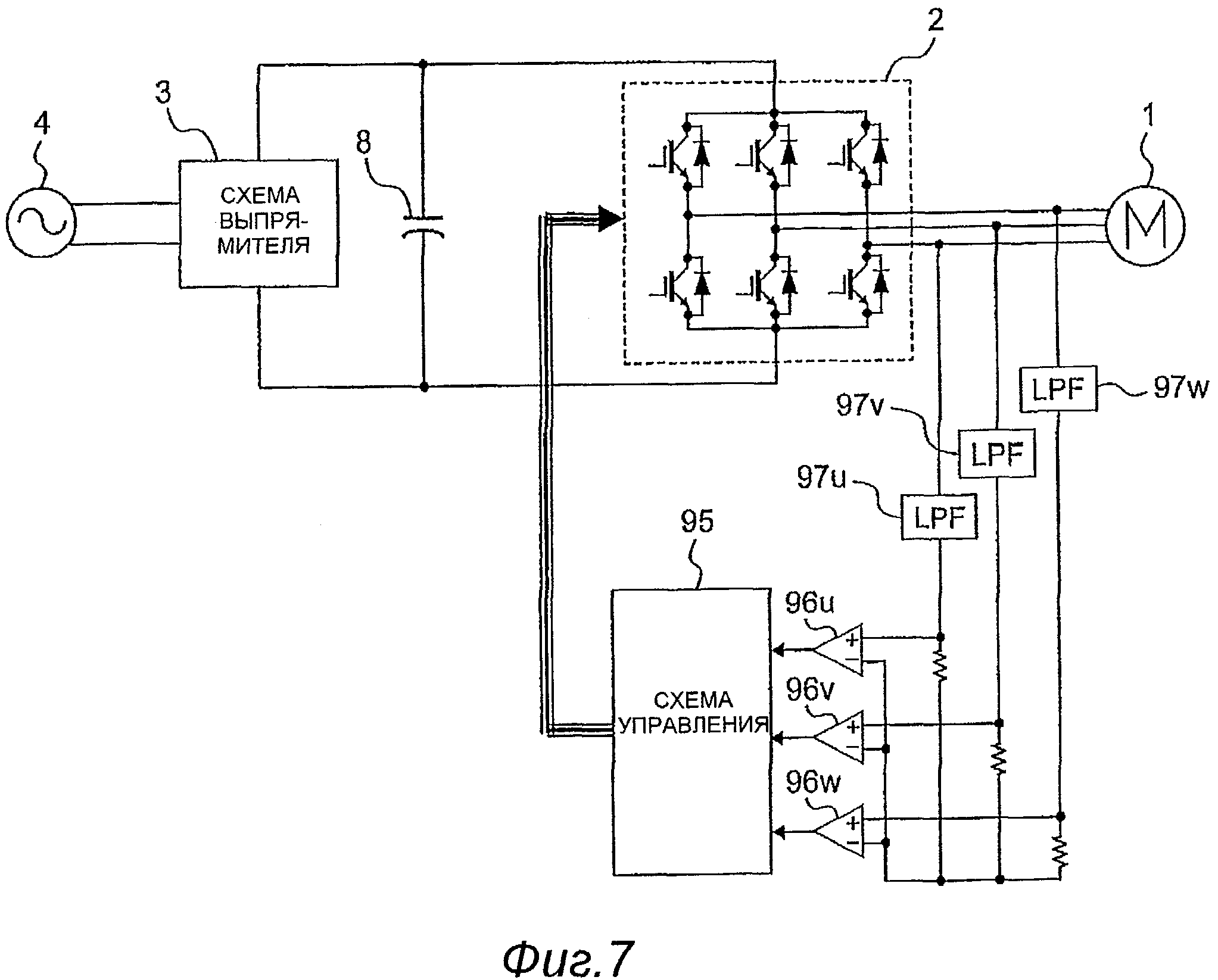
В упрощенном способе конкретное напряжение подают только в течение части периода, например, на электрический угол 120°, напряжение на клеммах детектируется, когда напряжение не подается, и рассчитывается положение магнитного полюса (см., например, ссылку 2: Eiichi Ono, "Introduction to Power Electronics" (3rd ed.), Ohm-Sha, 20 августа 1997 г., стр.242-244). На фиг.7 показано известное устройство управления приводом электродвигателя согласно ссылке 2. Как показано на фиг.7, в известном устройстве управления приводом электродвигателя напряжение питания источника 4 питания переменного тока выпрямляется выпрямителем 3 и сглаживается конденсатором 8, в результате чего получается постоянный ток. Постоянный ток подается на трехфазную мостовую схему 2 и дополнительно на схему 95 управления, при этом полупроводниковый переключатель в трехфазной мостовой схеме 2 включается или выключается, тем самым на электродвигатель 1 подается эквивалентный трехфазный переменный ток. Эквивалентный трехфазный переменный ток является переменным током, циклически повторяющим подачу питания положительного направления, отключение подачи питания, подачу питания отрицательного направления и отключение подачи питания. Для обнаружения положений магнитного полюса электродвигателя 1 напряжения в период отсутствия питания фильтруются фильтрами (97u, 97v, 97w) и сравниваются в компараторах (96u, 96v, 96w) с опорным напряжением или со средней величиной трех напряжений, при этом положения магнитного полюса определяют непосредственно по форме волны наведенного напряжения.
Однако в конфигурации по ссылке 1 необходимо всегда детектировать ток электродвигателя, и поскольку он основан на токе синусоидальной формы, приложенное напряжение должно изменяться во времени, и расчет управления становится довольно сложными. В конфигурации по ссылке 2 в период отсутствия напряжения требуется относительно длительный период, когда фазовый ток электродвигателя равен нулю, и в это время можно детектировать изменения напряжение на клеммах. В результате требуемая частота вращения повышается, и, если применяется управление системы со слабым полем, когда напряжение постоянного тока недостаточно, когда подача поточного тока отключена, период нулевого тока электродвигателя невозможно в достаточной степени продлить, и хотя напряжение, генерируемое электродвигателем, достаточно превышает напряжение постоянного тока, осуществлять управление системы со слабым полем становится трудно.
Краткое изложение существа изобретения
Настоящее изобретение направлено на решение указанных проблем, и задачей изобретения является создание устройства управления приводом электродвигателя, способного осуществлять приведение в движение системы со слабым полем, в то же время удерживая напряжение, генерируемое инвертором, постоянным.
Для решения указанных проблем устройство управления приводом электродвигателя согласно настоящему изобретению имеет трехфазную мостовую схему, состоящую из элементов, имеющих диоды для пропускания тока в обратном направлении, предусмотренные параллельно каждому переключающему элементу для преобразования постоянного тока или эквивалентного постоянного тока от источника питания, полученного путем выпрямления и сглаживания, или переменного тока от источника питания в эквивалентный трехфазный переменный ток произвольного напряжения и произвольной частоты в трехфазной мостовой схеме, и для приведения в движение электродвигателя с заданной частотой вращения, в котором эквивалентный трехфазный переменный ток является эквивалентным трехфазным переменным током, циклически повторяющим период подачи питания положительного направления, период отсутствия подачи питания, период подачи питания отрицательного направления и период отсутствия подачи питания на каждой фазе, при этом устройство дополнительно содержит схему управления для детектирования напряжения на клеммах электродвигателя в период отсутствия подачи питания, получения времени изменения напряжения на клеммах с положительного на отрицательное как времени смены тока соответствующей фазы с отрицательного на положительный, для получения времени смены напряжения на клеммах с отрицательного на положительное как времени смены тока соответствующей фазы с положительного на отрицательный и для регулирования фазы приложенного напряжения так, чтобы разность между фазой тока на основании каждого полученного времени изменения тока и фазой переменного тока (напряжения эквивалентного трехфазного переменного тока) на электродвигателе, генерируемого в результате приложения напряжения, соответствовала заданной величине. Поэтому, если наведенное напряжение нельзя оценить по напряжению на клеммах в период отсутствия подачи питания, можно узнать фазу тока электродвигателя и, поддерживая фазу тока и фазу напряжения в требуемом отношении, приведение в движение электродвигателя можно осуществлять стабильно.
В эквивалентном трехфазном переменном токе абсолютная величина напряжения на клеммах, генерируемая каждым мостом в период подачи питания, может быть постоянным напряжением относительно потенциала нейтральной точки участка постоянного тока. Поэтому менять приложенное напряжение во времени не требуется и приведение в движение электродвигателя можно осуществлять стабильно с помощью простой конструкции.
Абсолютную величину напряжения на клеммах, генерируемую на каждом мосту в период подачи питания, можно регулировать на основе отклонения между фактической частотой вращения и требуемой частотой вращения. Таким образом достигается требуемая частота вращения.
Когда фактическая частота вращения ниже, чем требуемая частота вращения, если абсолютная величина напряжения на клеммах является максимально возможной, отношение периода отсутствия подачи питания можно увеличить, а начальную фазу подачи питания можно отрегулировать таким образом, чтобы инвертировать полярность тока сразу после перехода в период отсутствия подачи питания. Следовательно, фактическое напряжение, поданное на двигатель, не понижается, и фазу тока можно сместить вперед, реализовать приведение в движение системы со слабым полем и расширить диапазон приведения в движение.
Устройство управления приводом электродвигателя дополнительно может содержать средство для детектирования тока или мощности на входе устройства управления приводом электродвигателя или на входе системы, содержащей устройство управления приводом электродвигателя. В этом случае устанавливается верхний предел увеличения отношения периода отсутствия подачи питания на основе расчетной величины выходного сигнала средства детектирования входного сигнала, деленного на частоту вращения. Величина входной мощности, деленная на частоту вращения, почти соответствует крутящему моменту электродвигателя, и можно узнать момент нагрузки, который является параметром для определения предела стабильности работы без датчика при управлении системой со слабым полем, и реализуется стабильное приведение в движение в широком диапазоне, вплоть до предела приведения в движение системы со слабым полем.
В отношении входной мощности, если приблизительные величины мощности, потребляемой другими элементами, не являющимися приводом электродвигателя, известны заранее, результат вычитания той части мощности, которая потребляется другими элементами, не являющимися приводом электродвигателя, из выходной мощности средства детектирования входного сигнала можно использовать как выходной сигнал средства детектирования входного сигнала. Поэтому крутящий момент, реально генерируемый электродвигателем, можно оценить более точно, и стабильность приведения в движение реализуется в широком диапазоне, вплоть до предела приведения в движение системы со слабым полем.
Если абсолютная величина (абсолютная величина напряжения на клеммах) приложенного к клеммам напряжения, генерируемого в период подачи питания, меньше максимально возможной и когда достигнута требуемая частота вращения, отношение периода подачи питания увеличивается, подача питания начинается почти сразу после инвертирования напряжения на клеммах в период отсутствия подачи питания путем управления фазой подачи питания. Следовательно, когда частота вращения низка и имеется существенный запас для приложенного напряжения, поддерживается соответствующее отношение фаз между напряжением и током и реализуется приведение в движение с высоким КПД.
Устройство управления приводом электродвигателя может дополнительно содержать средство детектирования входного сигнала для детектирования входного тока или входной мощности устройства управления приводом электродвигателя или системы, содержащей устройство управления приводом электродвигателя, и разность фаз (опорную разность фаз) между начальной фазой отсутствия подачи питания и фазой инвертирования напряжения на клеммах в период отсутствия подачи питания можно определить на основе расчетной величины выходного сигнала средства детектирования входного сигнала, деленной на частоту вращения. Следовательно, если момент нагрузки подвергается флуктуациям, в зависимости от крутящего момента поддерживается соответствующее отношение фаз и приведение в движение с высоким КПД реализуется в широком диапазоне крутящего момента.
Что касается входной мощности, если приблизительные величины мощности, потребляемой другими элементами, не являющимися приводом электродвигателя, известны заранее, в качестве выходного сигнала средства детектирования входного сигнала можно использовать результат вычитания мощности, потребляемой другими элементами, не являющимися приводом электродвигателя, из выходного сигнала средства детектирования входного сигнала. Поэтому, если крутящий момент нагрузки подвергается флуктуациям, поддерживается соответствующее отношение фаз в зависимости от крутящего момента и приведение в движение с высоким КПД реализуется в широком диапазоне крутящего момента.
В устройстве управления приводом электродвигателя при старте можно использовать эквивалентный трехфазный переменный ток, циклически повторяющий период подачи питания положительного направления, период отсутствия подачи питания, период подачи питания отрицательного направления и период отсутствия подачи питания в каждой фазе, при этом ширина импульса приложенного напряжения регулируется таким образом, чтобы напряжение на клеммах могло инвертироваться в период отсутствия подачи питания и работа могла также включать этап подтверждения, что напряжение на клеммах было инвертировано практически точно в период отсутствия питания. Следовательно, с начала старта приведение в движение реализуется одним и тем же средством детектирования, и схема управления приводом упрощается.
В устройстве управления приводом электродвигателя по настоящему изобретению, без необходимости детектирования мгновенного тока, благодаря широкому диапазону измерения фазы тока реализовано приведение в движение системы со слабым полем в широком диапазоне, что позволяет осуществлять приведение в движение с высоким КПД на средней и низкой частоте вращения и получить широкий диапазон приведения в движение.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
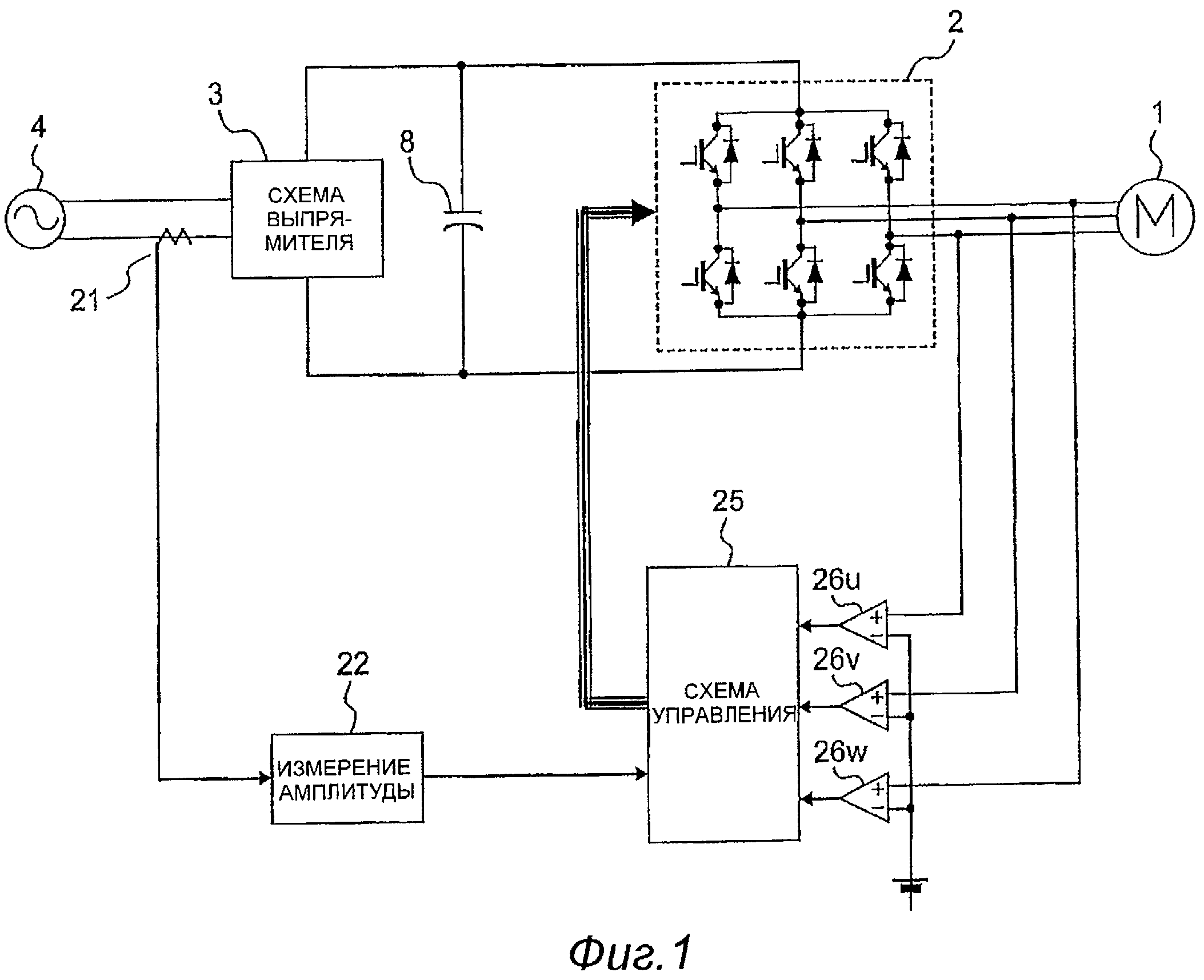
фиг.1 - общая схема устройства управления приводом электродвигателя для вариантов воплощения с 1 по 4 согласно изобретению;
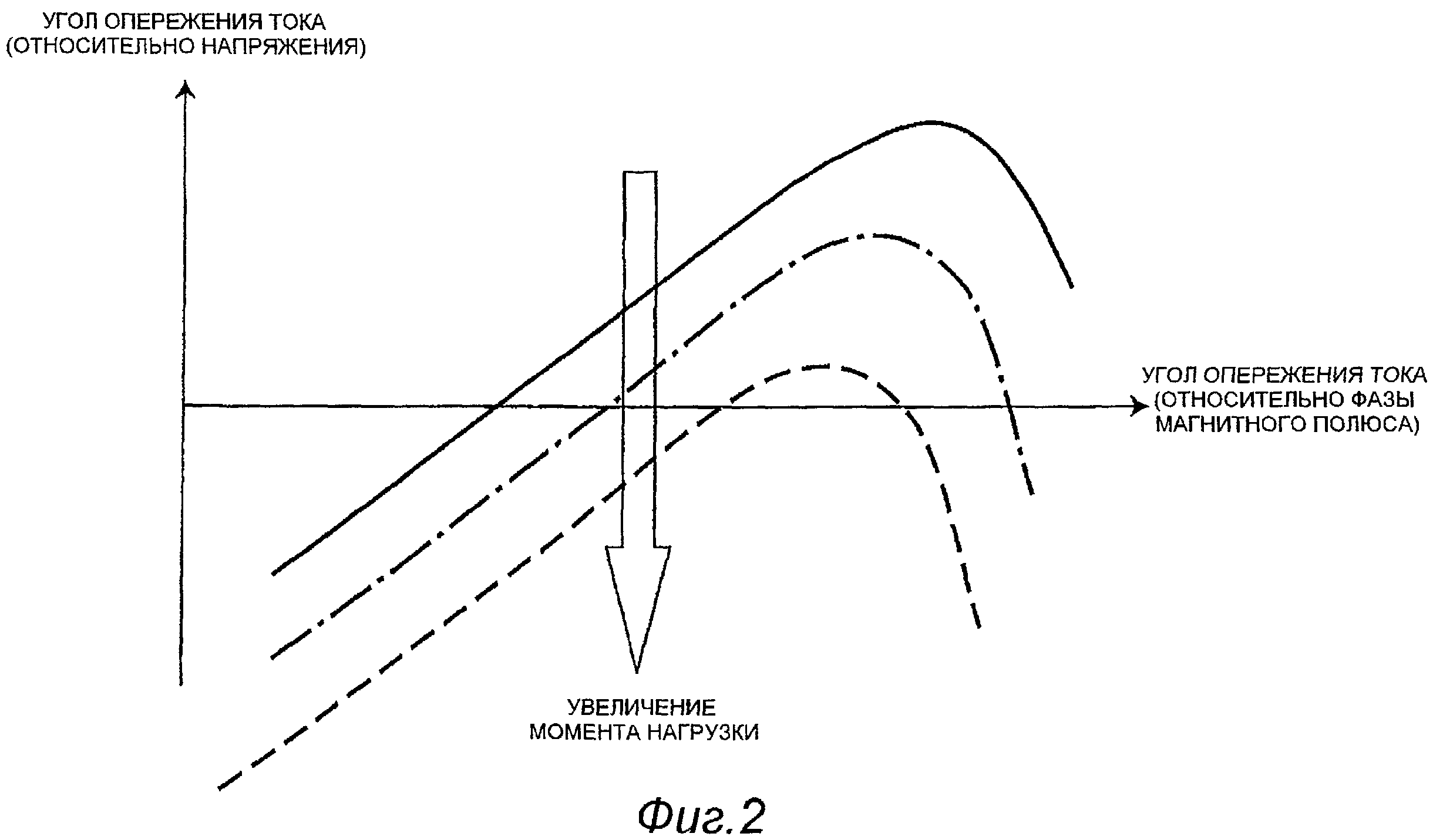
фиг.2 - диаграмма, иллюстрирующая характеристики электрического угла опережения в вариантах воплощения 1 и 2 согласно изобретению;
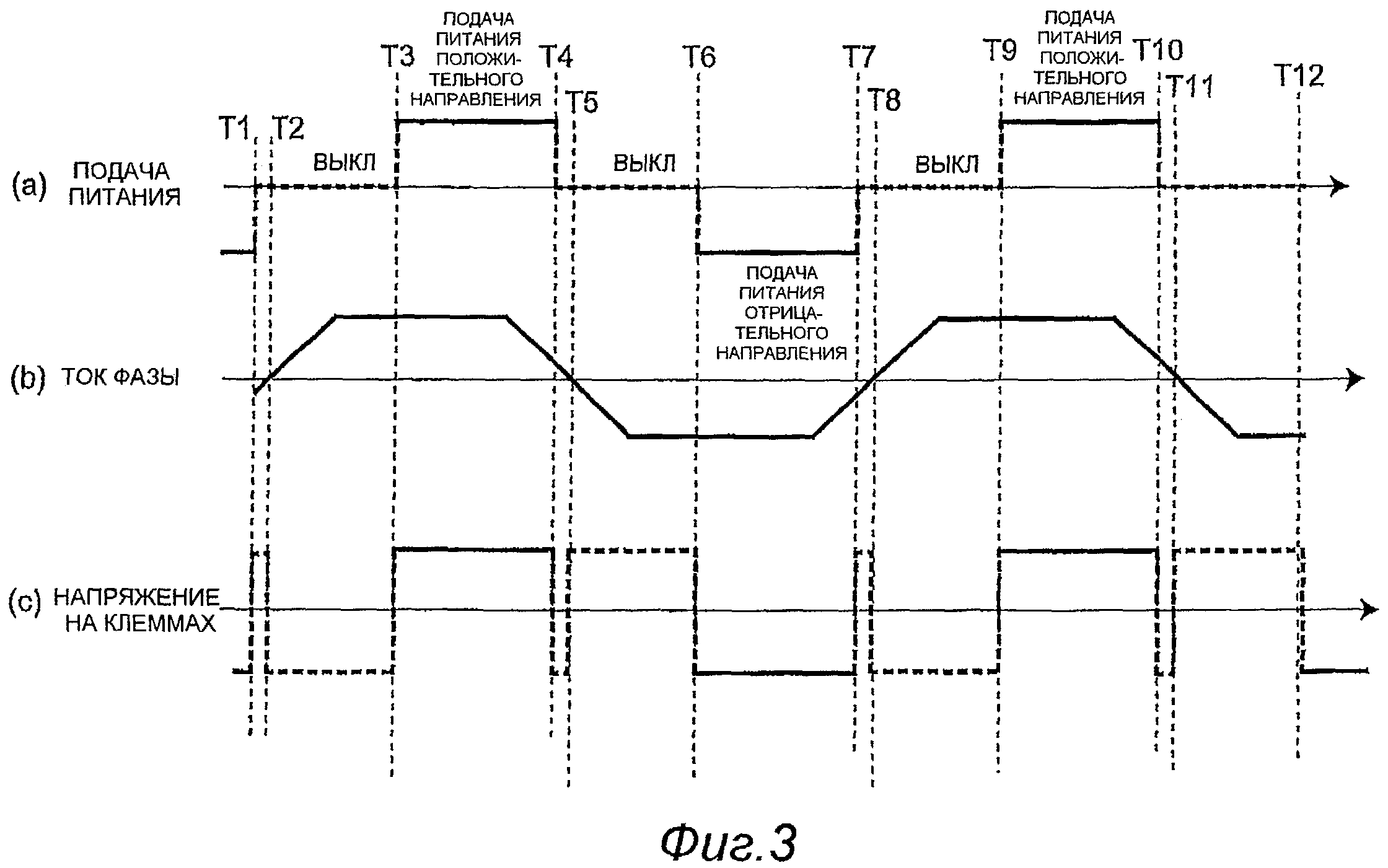
фиг.3 - диаграмма, иллюстрирующая форму выходного сигнала устройства управления приводом электродвигателя в варианте воплощения 1 настоящего изобретения;
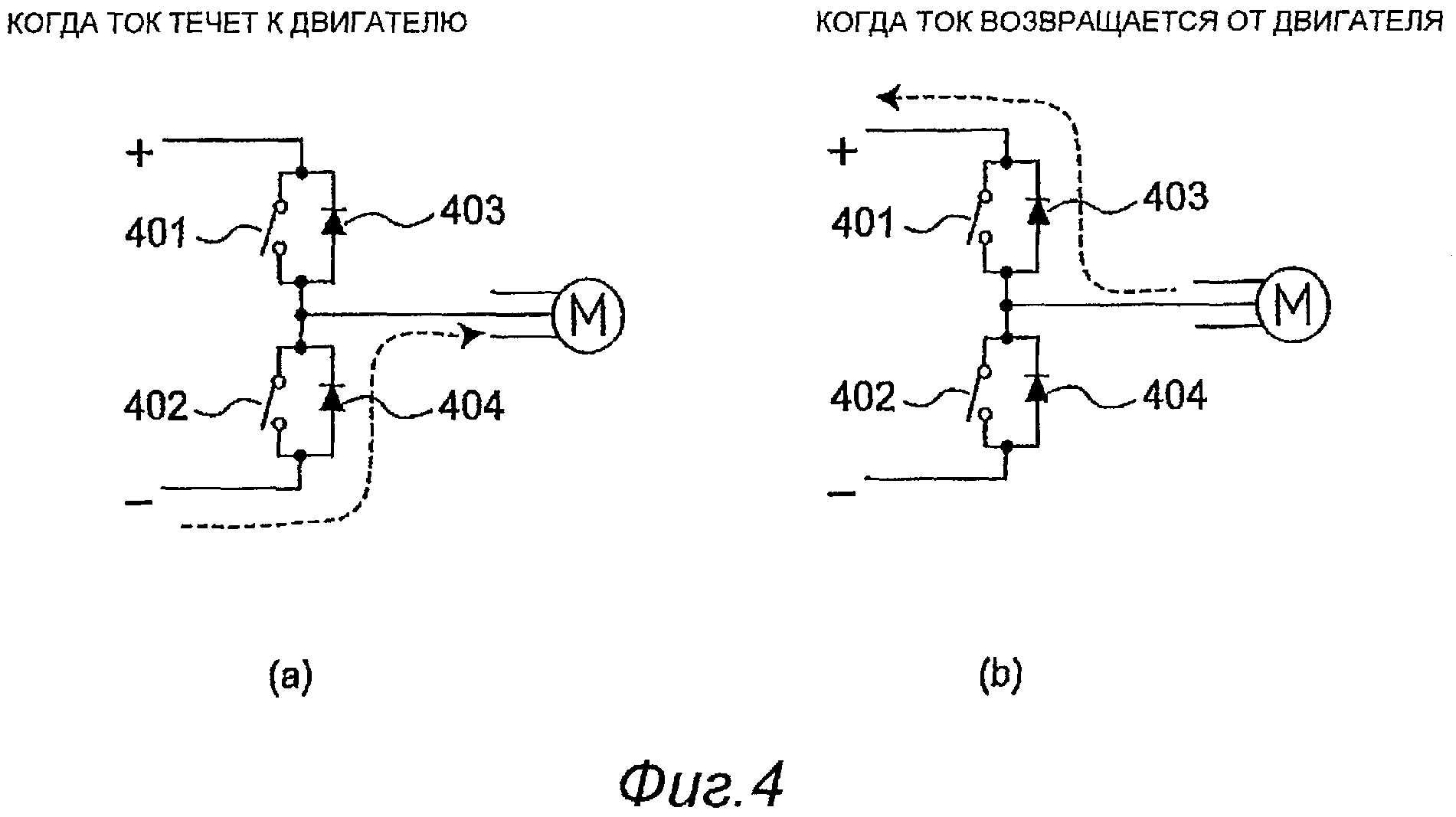
фиг.4 - схема, поясняющая принцип работы варианта воплощения 1 настоящего изобретения;
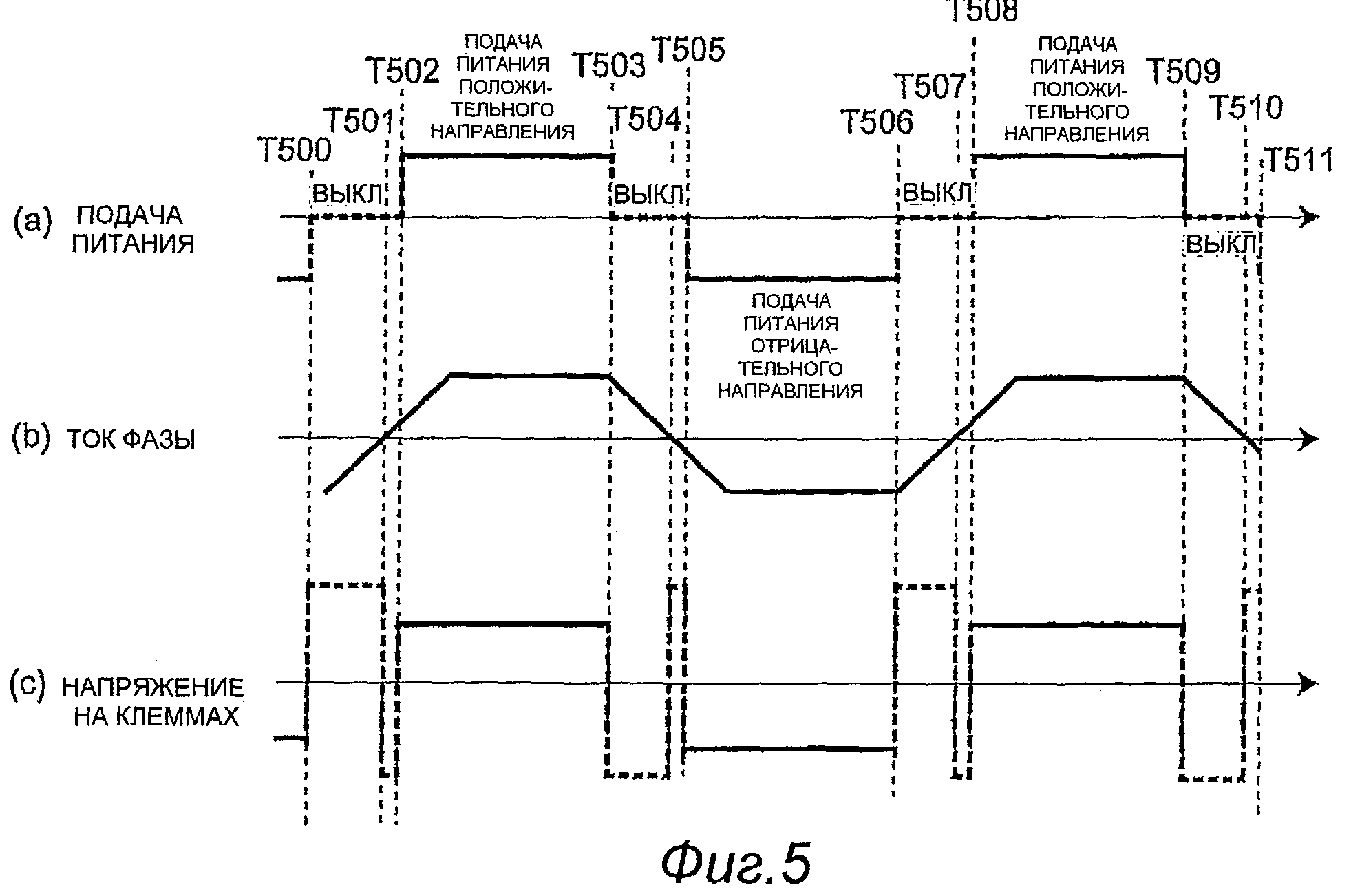
фиг.5 - диаграмма, иллюстрирующая форму волны выходного сигнала устройства управления приводом электродвигателя согласно варианту воплощения 3 настоящего изобретения;
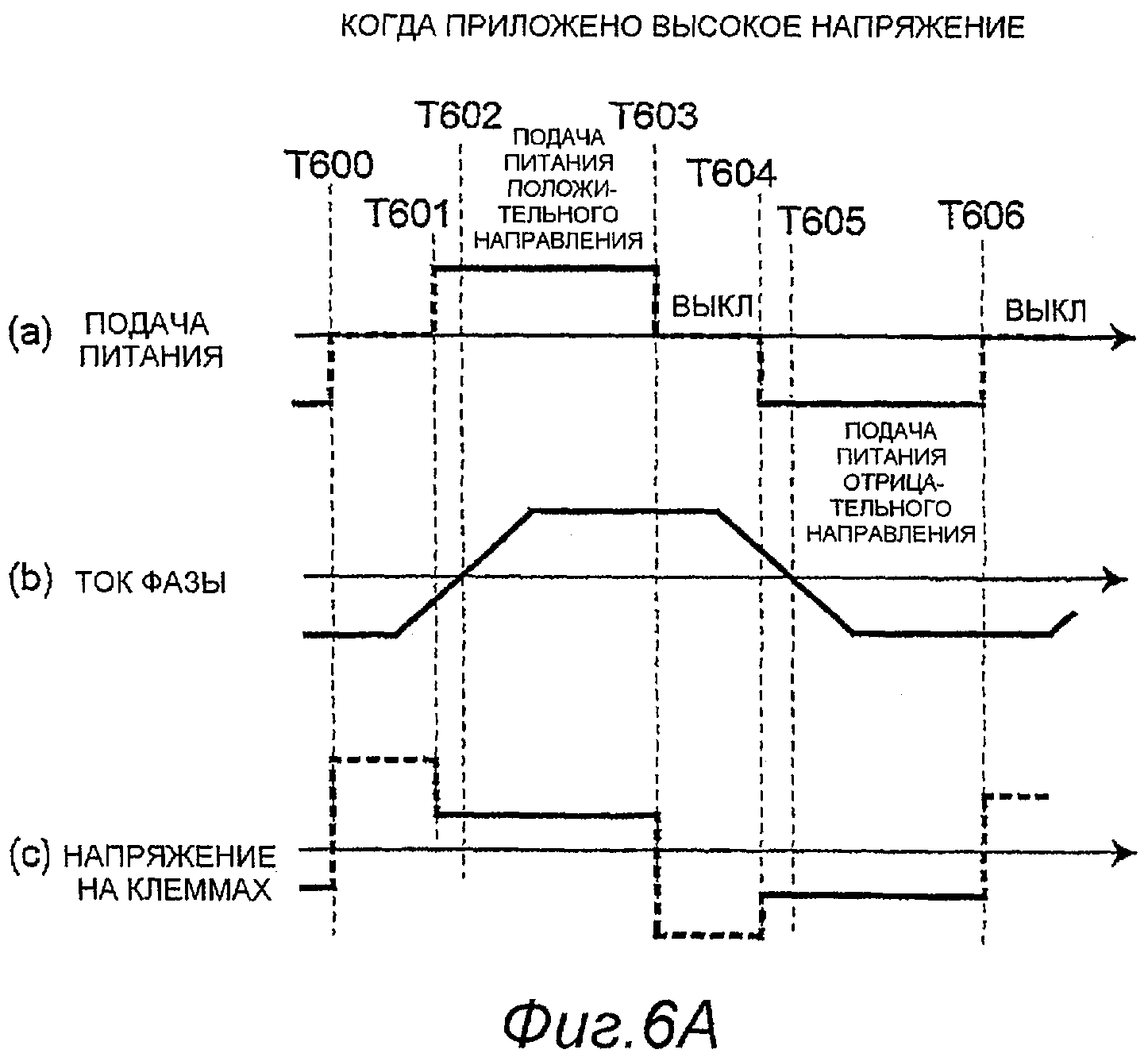
фиг.6А - диаграмма, иллюстрирующая форму волны выходного сигнала устройства управления приводом электродвигателя согласно варианту воплощения 4 настоящего изобретения;
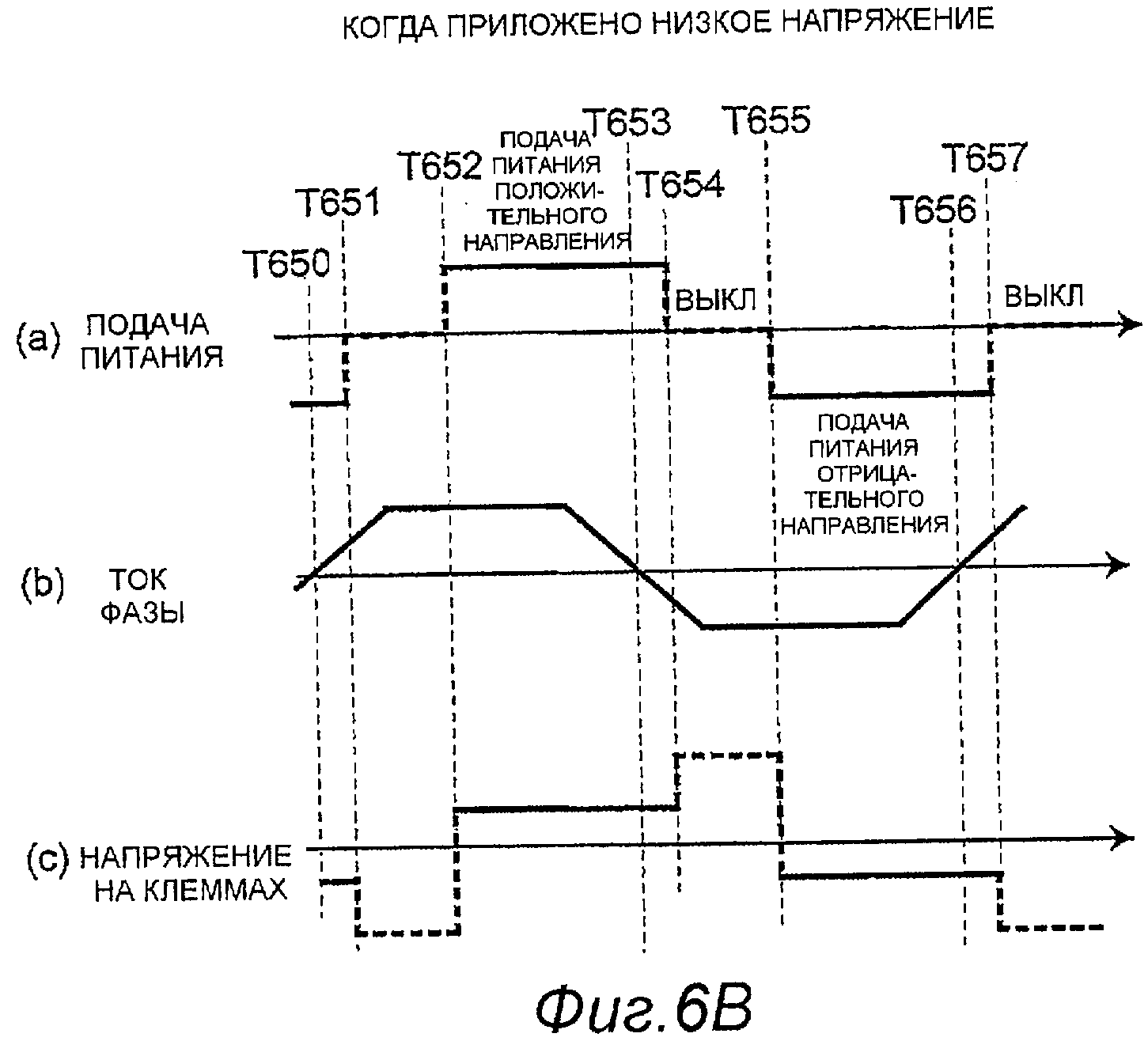
фиг.6В - диаграмма, иллюстрирующая форму волны выходного сигнала устройства управления приводом электродвигателя согласно варианту воплощения 4 настоящего изобретения;
фиг.7 - общая схема известного устройства управления приводом электродвигателя.
Описание предпочтительных вариантов воплощения настоящего изобретения
Далее следует более подробное описание предпочтительных вариантов осуществления настоящего изобретения со ссылками на приложенные чертежи. Следует отметить, однако, что изобретение не ограничивается этими иллюстративными вариантами.
Вариант 1
На фиг.1 представлена схема устройства управления приводом электродвигателя по варианту воплощения 1 настоящего изобретения. Конфигурация устройства управления приводом электродвигателя, показанного на фиг.1, является общей и для вариантов 2-4. На фиг.1 напряжение на выходе источника 4 питания переменного тока выпрямляется схемой 3 выпрямителя и сглаживается конденсатором 8, что образует источник питания постоянного тока. Источник питания постоянного тока соединен с трехфазной мостовой схемой 2, а выход трехфазной мостовой схемы 2 подключен к электродвигателю 1. Трехфазная мостовая схема 2 имеет всего шесть элементов, по два элемента на каждую фазу. Каждый элемент трехфазной мостовой схемы 2 состоит из параллельного соединения диодов, способных пропускать токи в направлении, обратном направлению пропускания полупроводникового переключателя. Схема 25 управления управляет трехфазной мостовой схемой 2, и выводит информацию о сравнении трех выходных сигналов трехфазной мостовой схемы 2 с опорным напряжением в компараторах 26u, 26v, 26w, и оценивает состояние вращения электродвигателя 1, и управляет трехфазной мостовой схемой 2, тем самым осуществляя соответствующее приведение в движение электродвигателя 1. Используя выходные сигналы средства 21 детектирования тока для детектирования тока, протекающего от источника 4 питания переменного тока, и средство 22 детектирования амплитуды для детектирования амплитуды этого тока, можно реализовать прецизионное управление схемы 25 управления.
Прежде чем описывать работу схемы 25 управления, следует пояснить основной принцип такой системы привода. На фиг.2 показана характеристика угла опережения тока относительно фазы магнитного полюса электродвигателя и приложенного напряжения в условиях одной и той же частоты вращения и одного и того же крутящего момента. Для приведения в движение электродвигателя с высоким КПД при том же токе нужно генерировать больший крутящий момент, и, следовательно, идеально было бы приводить в движение электродвигатель таким образом, чтобы фаза магнитного полюса и фаза тока были согласованы. Однако если в системе приведения в движение с высоким КПД осуществляется попытка приводить в движение двигатель с более высокой частотой вращения, требуется приложить более высокое напряжение, и схема увеличивается в размерах. Следовательно, если конкретно на высокой частоте вращения высокий КПД не требуется, ток опережает фазу магнитного полюса, что известно как приведение в движение системы со слабым полем. С помощью приведения в движение системы со слабым полем напряжение, приложенное к двигателю, можно снизить, и высоковольтная схема не нужна. В настоящем изобретении, однако, поскольку желательно избавиться от средства для детектирования фазы магнитного полюса, эту фазу магнитного полюса нельзя детектировать непосредственно и нельзя непосредственно управлять углом опережения тока. Но, как следует из диаграммы характеристики, приведенной на фиг.2, если угол опережения тока относительно фазы магнитного полюса увеличен, увеличивается и угол опережения тока относительно приложенного напряжения. Соответственно, когда разность фаз приложенного напряжения и тока удерживается на заданной величине, можно реализовать и приведение в движение системы с высоким КПД, и приведение в движение системы со слабым полем.
На фиг.3(а)-(с) приведены диаграммы формы волны для пояснения работы схемы 25 управления. В схеме 25 управления на каждой фазе операции циклически повторяются в следующем порядке: отсутствие подачи питания, подача питания нормального направления, отсутствие подачи питания и подача питания отрицательного направления. На фиг.3(а) показана форма волны подачи питания, где период отсутствия подачи питания продолжается с момента Т1 до момента Т3, от момента Т4 до момента Т6, от момента Т7 до момента Т9 и от момента Т10 до момента Т12. Период подачи питания положительного направления продолжается от момента Т3 до момента Т4 и от момента Т9 до момента Т10, а период подачи питания отрицательного направления продолжается от моменте Т6 до момента Т7. На фиг.3(b) показана форма волны тока на этой фазе, где ток течет в положительном направлении с момента Т2 до момента Т5 и с момента Т8 до момента Т11, а в остальные периоды ток течет в отрицательном направлении. На фиг.3(с) показана форма волны напряжения на клеммах в это время. За счет полупроводникового переключателя, когда питание подается в положительном направлении или в отрицательном направлении, напряжение на клеммах равно напряжению подачи питания, но в период отсутствия подачи питания форма волны напряжения на клеммах меняется в зависимости от состояния тока. На фиг.3 форма волны показана сплошной линией в период подачи питания и штриховой линией в период отсутствия подачи питания.
На фиг.4 показан принцип такой смены. На фиг.4(а) показан ток, текущий от мостовой схемы к электродвигателю 1. В этом случае переключатели 401 и 402 выключены и ток течет на электродвигатель 1 через диод 404. За счет этого диода клемма двигателя и минусовая клемма источника питания постоянного тока соединены друг с другом, и напряжение на клемме равно напряжению на минусовой клемме источника питания постоянного тока. На фиг.4(b) показан ток, текущий обратно от двигателя. В этом случае путем соединения с плюсовой клеммой источника питания постоянного тока через диод 403 напряжение на клемме равно напряжению на плюсовой клемме источника питания постоянного тока.
Этот принцип объясняет форму волны на фиг.3(с), т.е. в момент Т1, когда отключается подача питания отрицательного направления, ток течет в отрицательном направлении и напряжение на клемме имеет плюсовой потенциал напряжения постоянного тока. В момент Т2 полярность тока меняется на обратную и напряжение на клемме имеет минусовой потенциал напряжения постоянного тока. В момент Т3 при подаче питания в положительном направлении напряжение на клеммах имеет плюсовой потенциал напряжения постоянного тока. В момент Т4 путем отключения подачи питания ток положителен и напряжение на клеммах имеет минусовой потенциал напряжения постоянного тока. В момент Т5 полярность тока меняется на обратную и напряжение на клеммах имеет положительный потенциал напряжения постоянного тока. В момент Т6 при подаче питания отрицательного направления напряжение на клеммах имеет минусовой потенциал напряжения постоянного тока. Схема 25 управления, таким образом, управляет подачей питания, и, в частности, момент следующего начала подачи питания управляется таким образом, чтобы максимально сократить время с момента отключения подачи питания до момента инвертирования фазы тока (например, с Т1 до Т2, с Т4 до Т5 или с Т7 до Т8). Если время, прошедшее с момента отключения питания до инвертирования фазы тока, дольше, чем требуется, осуществляется смещение вперед момента следующего начала подачи питания. В это время напряжение на клеммах имеет форму, почти свободную от периодов отсутствия подачи питания. Дополнительно, фазу тока можно сместить в сторону опережения относительно фазы напряжения на участок от фазы начала подачи питания и фазы инвертирования тока до фазы следующего начала подачи питания.
Если несмотря на такой режим приведения в движение достичь заданной частоты вращения не удается, долю периода подачи питания уменьшают. За счет укорачивания периода подачи питания время от фазы инвертирования тока до следующего начала периода подачи питания удлиняется и угол опережения тока на основе напряжения можно увеличить дополнительно. В результате угол опережения тока относительно фазы магнитного полюса можно увеличить и диапазон приведения в движение системы со слабым полем можно расширить.
Таким образом, укорачивая период от отсутствия подачи питания до инвертирования полярности тока, как показано на фиг.3(с) формой волны напряжения на клеммах, можно получить прямоугольное напряжение максимальной амплитуды напряжения обеих полярностей и подавать на двигатель высокое напряжение. Поэтому несмотря на создание максимально высокого напряжения можно использовать и приведение в движение системы со слабым полем, и приведение в движение с высокой частотой вращения.
Вариант 2
В этом варианте схема 25 управления по фиг.1 использует выходные сигналы средства 21 детектирования тока для детектирования тока, текущего от источника 4 питания переменного тока, и сигналы средства 22 детектирования амплитуды для детектирования амплитуды тока, при этом осуществляется прецизионное управление. Это особенно эффективно, когда двигатель имеет более широкий диапазон крутящего момента. На фиг.2 также показана характеристика фазы тока, когда нагрузочный крутящий момент изменяется. Когда крутящий момент увеличивается, угол опережения тока относительно напряжения уменьшается и точка отклонения угла опережения тока относительно напряжения сдвигается в сторону меньшего угла опережения тока. Управление приводом для поддержания постоянного отношения фазы тока к напряжению не может превысить эту точку отклонения, и поэтому желательно предварительно знать положение точки отклонения, чтобы осуществлять приведение в движение в более широком диапазоне. Соответственно, на входе устройства привода электродвигателя имеется средство 21 детектирования тока, а амплитуда детектированного выходного сигнала детектируется средством 22 детектирования амплитуды таким образом, чтобы величина входного тока была известна для схемы 25 управления.
Кроме того, поскольку напряжение источника 1 переменного тока почти постоянно, входной ток почти эквивалентен входной мощности. Предположив, что потери в схеме и в электродвигателе невелики, входная мощность и выходная мощность электродвигателя также почти эквивалентны. Поскольку схеме 25 управления известна частота вращения электродвигателя, то посредством деления величины входного тока на частоту вращения двигателя можно получить величину, почти эквивалентную крутящему моменту двигателя. Используя эту эквивалентную величину, можно определить предельную величину фазы тока относительно напряжения и можно реализовать приведение в движение системы со слабым полем вплоть до этого предела несмотря на измерения крутящего момента в широком диапазоне, а также можно реализовать широкий диапазон приведения в движение.
В настоящем описании используется входная мощность устройства управления приводом электродвигателя, но, например, в холодильнике входная мощность системы, помимо привода электродвигателя по настоящему изобретению, может включать и нагреватель. В таком случае схема 25 управления проверяет, включен ли нагреватель или нет, и электрическую мощность, потребляемую нагревателем, можно вычесть и с высокой точностью оценить крутящий момент двигателя, что позволяет реализовать более широкий диапазон приведения в движение.
Вариант 3
На фиг.5(а)-(с) представлены диаграммы формы волны для реализации приведения в движение с высоким КПД, если имеется существенный запас по напряжению, прилагаемому к электродвигателю. На фиг.5(а) показана команда на подачу питания полупроводниковым переключателем, где подача питания прекращается с момента Т500 до момента Т502, питание подается в положительном направлении с момента Т502 до момента Т503, питание прекращается с момента Т503 до момента Т505, питание подается в отрицательном направлении с момента Т505 до момента Т506, подача питания вновь прекращается с момента Т506 до момента Т508, питание подается в положительном направлении с момента Т508 до момента Т509, подача питания прекращается с момента Т509 до момента Т511, и, таким образом, циклически повторяется комбинация, состоящая из прекращения подачи питания, питания положительного направления, прекращения подачи питания, питания отрицательного направления.
На фиг.5(b) показана форма импульса тока фазы в состоянии управления. Ток фазы меняет полярность с отрицательной на положительную в момент Т501, а с положительной на отрицательную в момент Т504, и аналогично на положительную в момент Т507 и на отрицательную в момент Т510.
На фиг.5(с) показана форма волны напряжения на клеммах. Сплошной линией показан участок, на котором напряжение определяется подачей питания путем включения полупроводникового переключателя, а штриховыми линиями показан участок, на котором ток определяется подачей питания путем выключения полупроводникового выключателя. В период отсутствия питания напряжение на клеммах имеет полярность, обратную полярности тока. То есть, когда подача питания отсутствует, полярность напряжения известна из напряжения на клеммах. В состоянии управления, показанном на фиг.5, управление осуществляется таким образом, что полярность тока можно инвертировать непосредственно перед повторной подачей питания. Управляя моментом начала подачи питания таким способом, форма волны напряжения на клеммах демонстрирует переменную форму волны положительного напряжения и отрицательного напряжения в каждом периоде, равном приблизительно 180°.
На фиг.5 разность во времени между волной тока фазы и напряжения на клеммах является разностью между моментами Т500 и Т501, разностью между моментами Т503 и Т504 и разностью между моментами Т506 и Т507, и ее легко можно определить в схеме 25 управления. Поскольку разность во времени эквивалентна разности фаз, ширину импульса подачи питания можно регулировать таким образом, чтобы она равнялась требуемой разности фаз. Требуемая разность фаз может быть выбрана такой, чтобы предварительно определенный КПД мог иметь максимальную величину, или когда нагрузочный момент изменяется в широких пределах так же, как описано для варианта 2, приблизительную величину крутящего момента электродвигателя можно оценить по входной мощности и на основании этой величины можно определить требуемую разность фаз, чтобы получить максимальный КПД для каждой величины крутящего момента. Для достижения требуемой частоты вращения приложенное напряжение регулируют так, чтобы оно было ниже максимального допустимого приложенного напряжения, и поэтому фактическое напряжение может быть эквивалентно понижено посредством широтно-импульсной модуляции.
Вариант 4
На фиг.6А и 6В показаны диаграммы формы волны, иллюстрирующие операцию управления при пуске. На ультранизкой частоте вращения после пуска наведенное напряжение является низким, и его трудно отличить от флуктуаций вращения и, следовательно, трудно модулировать фазу подачи питания при приведении в движение. Соответственно, в начале периода пуска обратная связь относительно фазы вращения пропускается и подается напряжение переменного тока заранее определенной частоты до тех пор, пока ротор электродвигателя не будет синхронизирован и не начнет вращение. На фиг.6А и 6В показаны формы волны в начале такого состояния.
Когда приложенное напряжение переменного тока выше, чем соответствующее напряжение, как показано на фиг.6А, ток фазы существенно отстает по фазе от напряжения на клеммах. То есть в период отсутствия подачи питания с момента Т600 по момент Т601 полярность тока фазы отрицательна, и, следовательно, напряжение на клеммах является максимальным в положительном направлении. В следующем периоде отсутствия подачи питания с момента Т603 до момента Т604 полярность тока фазы положительна, и, следовательно, напряжение на клеммах является максимальным в отрицательном направлении. В результате ток фазы отстает по фазе от напряжения на клеммах.
Когда приложенное напряжение переменного тока ниже соответствующей величины, как показано на фиг.6В, ток фазы значительно опережает по фазе напряжение на клеммах. То есть в период отсутствия подачи питания с момента Т651 по момент Т652 полярность тока фазы положительна, и, следовательно, напряжение на клеммах имеет максимальную величину в отрицательном направлении. В следующем периоде отсутствия подачи питания с момента Т654 до момента Т655 полярность тока фазы отрицательна, и, следовательно, напряжение на клеммах имеет максимальную величину в положительном направлении. В результате ток фазы отстает по фазе от напряжения на клеммах.
Для соответствующего приведения в движение на основе того же принципа регулируется ширина импульса напряжения при подаче питания таким образом, чтобы напряжение на клеммах можно было инвертировать в период отсутствия подачи питания. Таким образом, в результате подтверждения операции пуска путем передачи на систему управления, как было описано для варианта 3, можно реализовать соответствующее приведение в движение теми же схемными средствами с самого начала пуска.
Промышленная применимость
Устройство управления приводом электродвигателя согласно настоящему изобретению способно повысить КПД привода в диапазоне средних частот вращения при частом использовании и реализовать вращение с высокой частотой без использования датчика тока и т.п. или без регулирования приложенного напряжения, изменяющегося во времени в зависимости от изменений фазы напряжения, и, следовательно, оно может применяться в различных устройствах, включая тепловые насосы для холодного контура или горячего контура, используемые для сжатия хладагента, таких как холодильник, кондиционер воздуха, тепловой насос типа водонагревателя и другие насосы и нагнетатели.
Описание позиций
1 - электродвигатель
2 - трехфазная мостовая схема
3 - схема выпрямителя
4 - источник питания переменного тока
21 - средство детектирования тока
22 - средство детектирования амплитуды
25 - схема управления
26u, 26v, 26w - компаратор
Система беспроводной связи, устройство терминала, устройство базовой станции и способ беспроводной связи
Устройство терминала беспроводной связи, устройство базовой станции беспроводной связи и способ установки констелляции кластеров
Носитель записи, устройство воспроизведения и интегральная схема
Устройство очистки воздуха
Устройство передатчика ofdm, способ передачи с ofdm, устройство приемника ofdm и способ приема с ofdm
Беспроводной передатчик и способ передачи опорного сигнала
Устройство терминала и способ управления повторной передачей
Устройство базовой станции и способ передачи
Передатчик, способ передачи, приемник, способ приема, программа и интегральная схема
Носитель записи, устройство воспроизведения, интегральная схема, способ воспроизведения и программа
Радиотерминал, базовая радиостанция, способ формирования канального сигнала и способ приема канального сигнала
Носитель записи, устройство воспроизведения и интегральная схема
Способ размещения каналов и устройство базовой станции радиосвязи
Устройство для нагрева токами высокой частоты
Устройство воспроизведения, способ записи, система воспроизведения носителя записи
Носитель записи, устройство воспроизведения и интегральная схема
Устройство беспроводной связи и способ беспроводной связи
Система беспроводной связи, устройство терминала, устройство базовой станции и способ беспроводной связи
Устройство терминала беспроводной связи, устройство базовой станции беспроводной связи и способ установки констелляции кластеров
Носитель записи, устройство воспроизведения и интегральная схема

