Результат интеллектуальной деятельности: АДАПТИВНАЯ СИСТЕМА ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЕМ
Вид РИД
Изобретение
Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления нестационарными объектами, то есть объектами, меняющими со временем параметры своего математического описания.
Высокоточное управление нестационарными динамическими объектами актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью адаптивных систем, в которых осуществляются соответствующие изменения параметров регулятора для обеспечения неизменных свойств системы в целом, вопреки изменениям свойств объекта. Например, если коэффициент усиления объекта уменьшается, то коэффициент усиления регулятора должен увеличиться, и наоборот. Трудность заключается в определении изменений параметров динамических объектов. В литературе эти системы также называют самонастраивающимися системами (СНС).
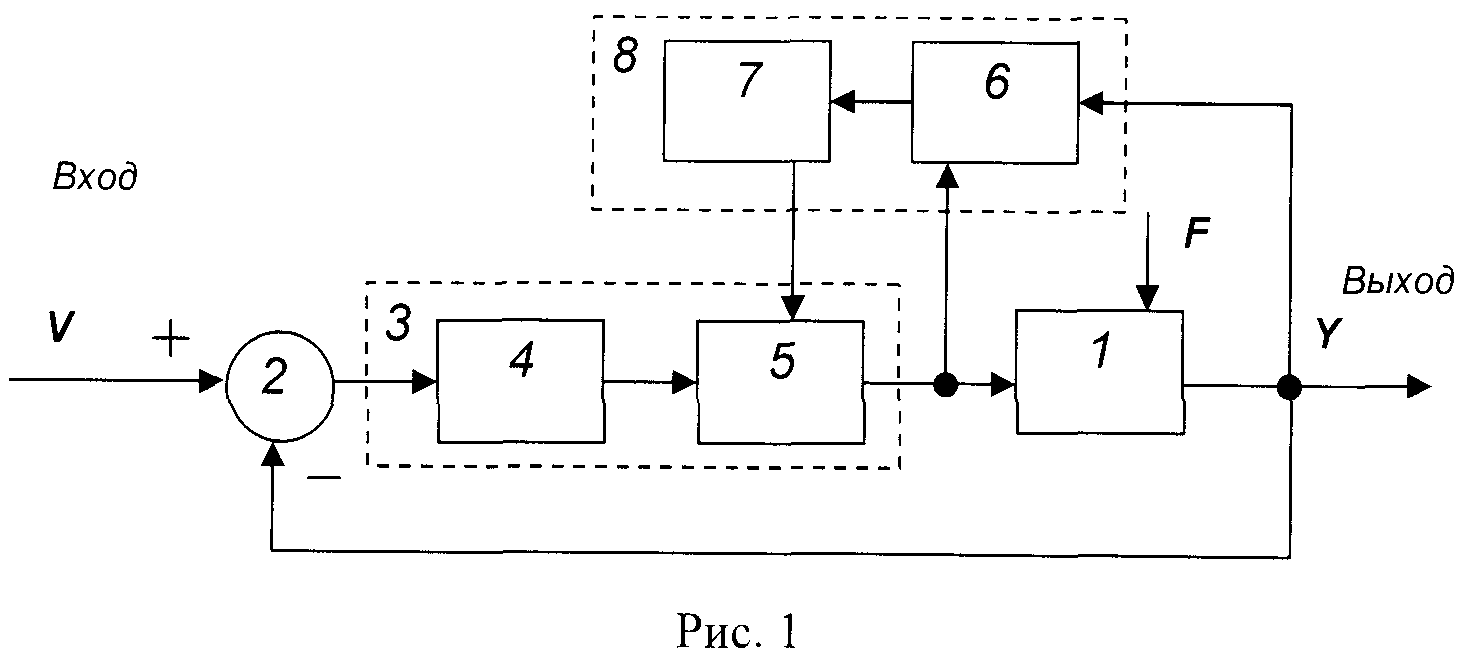
Известна самонастраивающаяся система по динамическим характеристикам объекта, показанная на рис.1, содержащая: 1 - объект, 2 - вычитатель, 3 - регулятор, 4 - имитатор желаемого математического описания (ИЖМО) разомкнутого контура, 5 - имитатор обращенного математического описания (ИОМО) объекта, 6 - анализатор внутренних условий (сигналов), 7 - вычислитель, 8 - корректирующее и вычислительное устройство [К.П.Власов. Теория автоматического управления. Учебное пособие. Харьков: Издательство Гуманитарный центр. 2007. Стр.443, рис.4.40].
Эта система работает следующим образом. Основной контур управления образован объектом 1, вычитателем 2 и регулятором 3. Стартовое значение параметров математического описания (МО) объекта приближенно известно. Оно описывается передаточной функцией WO и используется для определения стартовых параметров настройки регулятора 3. Регулятор состоит из двух последовательно включенных блоков, первый из которых, блок 4, обладает передаточной функцией WЖ, соответствующей желаемому МО разомкнутого контура, а второй блок 5 обладает передаточной функцией WK, обратной по отношению к известному стартовому МО объекта, то есть обеспечивается приближенное равенство

При последовательном соединении элементов в контуре эквивалентная передаточная функция всего контура WЭ равна произведению передаточных функций элементов, находящихся в этом контуре. Поэтому передаточная функция контура равна

В силу соотношения (1) достигается примерное равенство эквивалентной передаточной функции всего контура WЭ ее желаемому значению WЖ:

Таким образом, в исходном состоянии регулятор настроен на начальные параметры объекта и система обладает желаемыми свойствами, поэтому она устойчива и выполняет свои функции успешно.
В ходе работы системы на нее действуют внешние неизвестные факторы F, которые заставляют объект 1 медленно изменять параметры своего МО. Корректирующее и вычислительное устройство 8 анализирует входной и выходной сигнал объекта, на основании чего вычисляет новые значения передаточной функции объекта, а по ним вычисляет значения обратной передаточной функции объекта и управляет вторым блоком 5 таким образом, чтобы его передаточная функция оставалась равной обратной передаточной функции объекта. Корректирующее устройство 8 состоит из последовательно включенных анализатора внутренних условий (сигналов) и вычислителя.
В этой системе задача анализатора внешних условий (сигналов) 6 состоит в том, чтобы вычислить текущие динамические характеристики объекта 1, изменяющиеся под воздействием неизвестного и непредсказуемого внешнего воздействия F, анализатор 6 определяет параметры обратной структуры МО и вводит их в вычислитель 7.
Одним из недостатков данного устройства является недостаточная подробность описания принципа действия этого анализатора 6, поэтому для применения данной структурной схемы устройства требуется дополнительная детализация структуры анализатора 6.
Другим недостатком данного устройства является невозможность реализации элемента 5 в случае наличия элементов запаздывания в составе передаточной функции объекта WO. Элемент запаздывания формирует на своем выходе сигнал лишь по истечении некоторого времени после появления его на входе этого элемента. Обратную функцию по отношению к элементу запаздывания физически реализовать невозможно, поскольку такой элемент должен был бы предугадывать и формировать на своем выходе входной сигнал до того, как он появился на его входе.
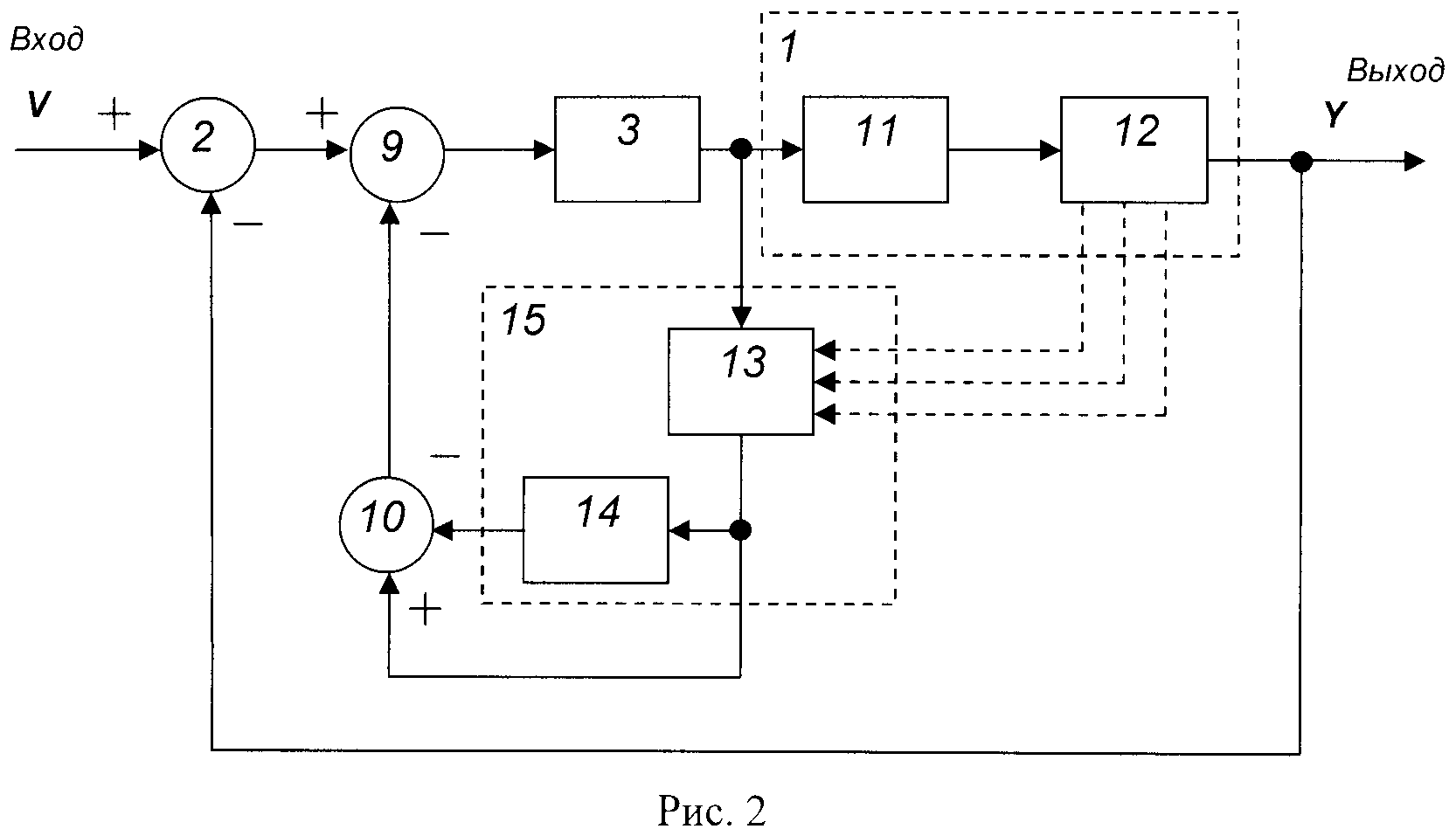
Наиболее близким к заявляемой системе является система, схема которой приведена на рис.2, где
1 - объект управления,
2 - первый вычитатель,
3 - регулятор,
9 - второй вычитатель,
10 - третий вычитатель,
11 - звено запаздывания в составе объекта управления,
12 - минимально-фазовая часть объекта управления,
13 - блок имитации математического описания минимально-фазовой части объекта,
14 - блок имитации математического описания звена запаздывания объекта,
15 - блок имитации полного математического описания объекта
[Александровский Н.М., Егоров С.В., Кузин Р.Е. Адаптивные системы автоматического управления сложными технологическими объектами. Под общей ред. Н.М.Александровского. - М.: Энергия. 1973. 272 стр. Стр.15, рис.1-5].
Эта система принята за прототип изобретения. Входом системы является положительный вход первого вычитателя, выходом системы является выход объекта управления.
Эта система работает следующим образом.
Исходные значения параметров МО объекта 1 считаются известными. Если в объекте имеется звено запаздывания, то объект можно условно представить как последовательное включение звена запаздывания 11 и остальной части МО 12, называемой минимально-фазовой. Регулятор 3 настраивается на виртуальный объект, состоящий только из элемента 12, а контур адаптации предназначен для компенсации вредного влияния звена 11. С этой целью в контуре адаптации имеется блок имитации полного МО объекта 15, состоящий из последовательно включенных блока 13 и блока 14. Если МО блока 13 полностью соответствует части МО реального объекта 12, то на выходе этого блока 13 формируется такой сигнал, какой формировался бы на выходе объекта в случае отсутствия в нем звена запаздывания 11, поскольку на блок 13 поступает тот же самый сигнал, что и на вход объекта 1. Этот сигнал, проходя через вычитатель 10, формирует сигнал отрицательной обратной связи, подаваемый на вход регулятора в то время, пока отклик с выхода Y на текущие изменения входного сигнала с выхода регулятора, пока еще не пришел вследствие влияния звена запаздывания 11. По истечении времени, равного времени задержки звена запаздывания 11, на выходе Y реального объекта будет сформирован сигнал, являющийся откликом объекта на изменения входного сигнала управления, поступающего на объект с выхода регулятора 3. Одновременно с этим на выходе блока 15 появится такой же сигнал, поскольку задержка элемента 14 совпадает с задержкой элемента 11, и в итоге передаточная функция последовательно включенных элементов 11 и 12 совпадает с передаточной функцией последовательно включенных элементов 13 и 14. То есть передаточная функция объекта 1 совпадает с передаточной функцией блока 15. На инвертирующий вход вычитателя 10 поступит сигнал с выхода блока 15, а на инвертирующий вход вычитателя 2 поступит такой же сигнал с выхода объекта 1. Сигнал с выхода вычитателя 10 поступит на регулятор через вычитатель 9, приходя на его инвертирующий вход. Поэтому сигнал с выхода блока 15, получив дважды инверсию, поступит на вход регулятора без инверсии. А сигнал с выхода реального объекта получит только одну инверсию и поступит на вход регулятора с инверсией. Таким образом, эти сигналы поступят с противоположными знаками и компенсируют друг друга. В итоге резких изменений на входе регулятора не произойдет, и система будет продолжать работать так, как если бы в МО реального объекта отсутствовало звено запаздывания. Но поскольку на любой реальный объект всегда поступают внешние воздействия F, которые на рис.2 не показаны, но показаны на рис.1, то выходной сигнал от реального объекта будет отличаться от выходного сигнала блока 15. Это отличие не будет компенсироваться обратной связью от блока 15, поэтому оно будет в составе сигнала обратной связи приходить на вход регулятора, и контур управления будет подавлять результаты этого воздействия как во всех системах с отрицательной обратной связью.
Пусть отклик объекта на входной сигнал u(t) равен y(t), отклик блока 15, соответственно, равен yМ(t). Оба эти отклика содержат в себе запаздывание на величину τ. Поэтому если сигнал u(t) возник в момент времени t0, то выходные сигналы появятся лишь в момент времени t1=τ+t0, а до этого времени на регулятор не поступает сигнал обратной связи от реального объекта. Отклик блока 15 формируется с помощью двух последовательно соединенных блоков 13 и 14, второй из которых 14 только вводит запаздывание на величину τ, а первый элемент 13 соответствует только части МО объекта 12, свободной от этого запаздывания. Следовательно, выходной сигнал yМ0(t) с выхода только элемента 13 не содержит этого запаздывания, то есть этот сигнал появляется в момент времени t0 и опережает по времени сигналы yМ(t) и y(t) на величину τ. На вход регулятора поступает следующая алгебраическая сумма сигналов:

На интервале от 0 до t0 вследствие запаздывания yМ(t)=0, y(t)=0, поэтому

То есть на этом интервале времени контур с обратной связью содержит только регулятор и часть МО 13, он не содержит звена запаздывания. Поэтому обеспечение устойчивости такого контура легко достигается.
По истечении времени задержки звена запаздывания на вход регулятора поступают все три сигнала, представленные в соотношении (4), которые можно представить в следующем виде:

Если бы МО блока 15 в точности соответствовала МО реального объекта, то сумма в квадратных скобках была бы строго равна нулю и контур обратной связи действовал бы точно так же, как и до прихода задержанного сигнала, то есть по соотношению (5). Но на реальный объект действуют неконтролируемые возмущения. Поэтому выходной сигнал реального объекта всегда отличается от выходного сигнала блока 15 на величину

Таким образом, на регулятор поступает сигнал следующего вида:

В этой сумме первое слагаемое формируется более оперативно, оно отвечает за свойства контура в области высоких частот. Поэтому оно обеспечивает устойчивость контура обратной связи. Второе слагаемое включает в себя объект управления, оно обеспечивает чувствительность контура обратной связи к реальным изменениям реального объекта. В целом эти два слагаемых составляют сигнал, который должен был бы сформироваться, если бы в МО объекта отсутствовало звено запаздывания.
Таким образом, в системе обеспечивается подавление вредного влияния звена запаздывания, входящего в МО объекта, с сохранением свойств системы с отрицательной обратной связи, которое состоит в подавлении результата внешнего воздействия F.
Кроме того, в структурной схеме данного устройства имеется связь от части реального объекта 12 к блоку 13, показанная пунктирными линиями. Предполагается, что изменения части МО 12 реального объекта 1 каким-то образом влияют на блок 13. Однако в описании данной системы не описано какого-либо устройства, структурной схемы или алгоритма, по которому эти изменения могли бы быть определены и внесены в блок 13.
Существенным недостатком описанной системы является невозможность ее реализации вследствие отсутствия описания структуры и принципа действия связи между элементами 12 и 13. Поэтому система не обладает требуемыми адаптивными свойствами, и она может утратить свои положительные качества вплоть до потери устойчивости, если накопленные изменения параметров реального МО объекта приведут к нарушению условий устойчивости замкнутых динамических систем.
Таким образом, такая система не является адаптивной и не достигает решения поставленной перед ней задачи, если хотя бы один параметр объекта существенно изменяется с течением времени под действием воздействий внешних условий.
Другой недостаток такой системы состоит в том, что она специально разработана для объекта с запаздыванием, а если запаздывание в объекте отсутствует или пренебрежимо мало, то элементы 11 и 14 тождественны простому повторителю сигналов, поэтому на вход вычитателя будут поступать идентичные сигналы, а на его выходе будет формироваться их разность, то есть нулевой сигнал, вследствие чего для таких объектов адаптивная обратная связь с элементом 15 отсутствует, и вся система вырождается в широко известную систему с обратной связью, содержащую только объект 1, вычитатель 2 и регулятор 3.
Изобретение решает задачу обеспечения эффективной адаптации объекта управления за счет повышения точности и быстродействия системы адаптации, а также позволяет улучшить ее динамические свойства.
Поставленная задача решается тем, что предлагается адаптивная система для объекта с запаздыванием, включающая последовательно расположенные в замкнутом контуре первый вычитатель и второй вычитатель, регулятор и объект управления, а также последовательно расположенные между выходом регулятора и инвертирующим входом второго вычитателя имитатора математического описания (ИМО) объекта управления и третий вычитатель, причем ИМО объекта содержит последовательно расположенные ИМО минимально-фазовой части объекта и ИМО звена запаздывания объекта, при этом выход объекта управления является выходом системы и соединен с инвертирующим входом первого вычитателя, неинвертирующий вход которого является входом системы, а неинвертирующий вход третьего вычитателя соединен с выходом ИМО минимально-фазовой части объекта, которая также содержит блок идентификации, при этом регулятор содержит последовательно расположенные имитатор желаемого математического описания (ИЖМО) разомкнутого контура и имитатор обратной структуры математического описания (ИОСМО) минимально-фазовой части объекта, причем один вход блока идентификации соединен с выходом объекта управления, а второй - с выходом ИМО объекта, а первый его выход соединен с входом ИМО звена запаздывания объекта, а второй - с ИОСМО минимально-фазовой части модели объекта.
Блок идентификации может содержать соединенные двунаправленными связями коррелятор и блок оптимальной настройки, при этом входы коррелятора являются входами блока идентификации, а выходы блока оптимальной настройки являются его выходами.
Блок идентификации может содержать, по меньшей мере, один дополнительный ИМО объекта, расположенный между выходом регулятора и входом коррелятора, а его управляющие входы соединены с блоком оптимальной настройки.
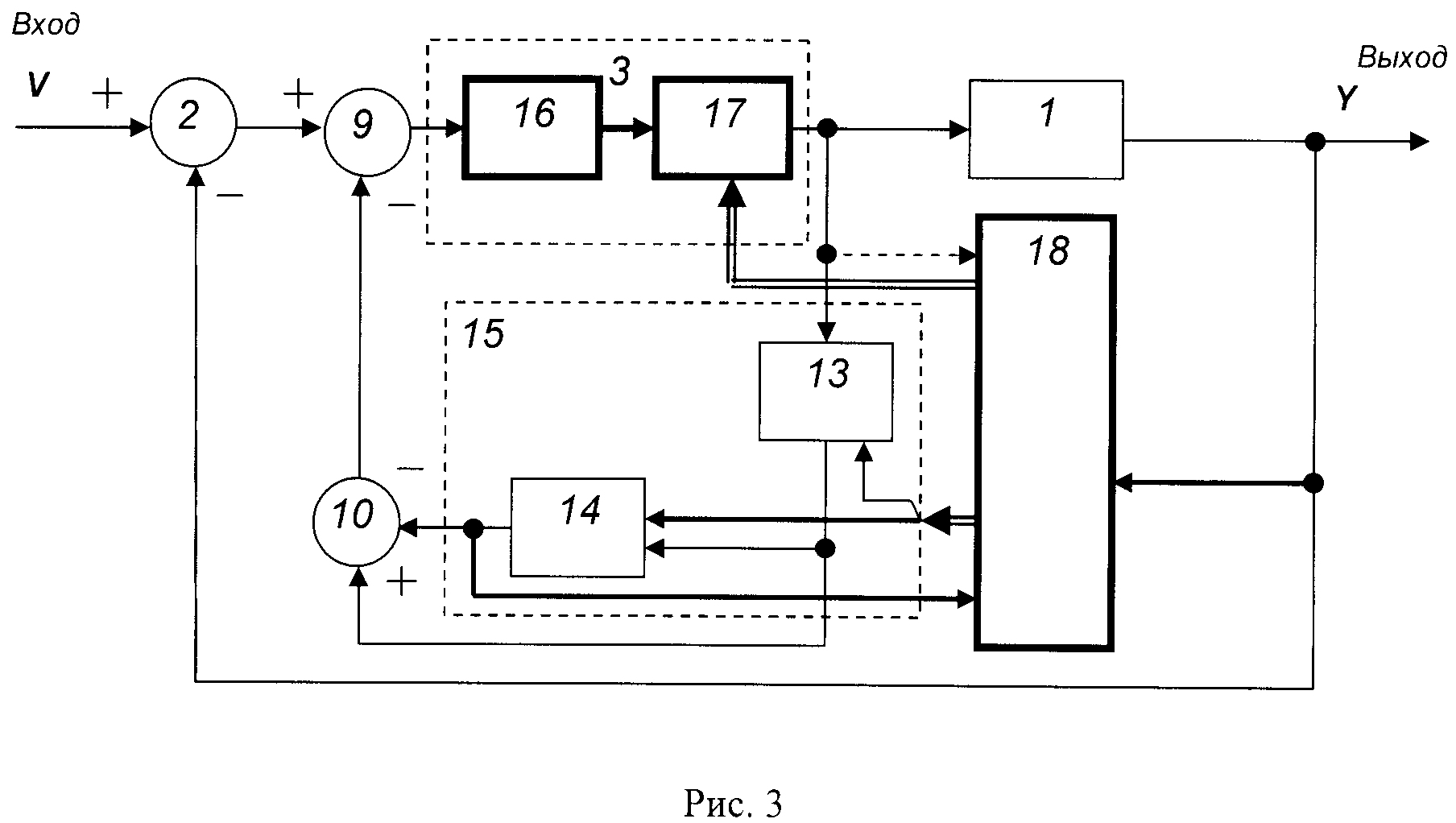
Схема предлагаемой адаптивной системы показана на рис.3.
Она содержит:
1 - объект управления,
2 - первый вычитатель,
3 - регулятор,
9 - второй вычитатель,
10 - третий вычитатель,
13 - имитатор математического описания минимально-фазовой части объекта,
14 - имитатор математического описания звена запаздывания объекта,
15 - имитатор математического описания объекта,
16 - имитатор желаемого математического описания разомкнутого контура,
17 - имитатор обратной структуры математического описания минимально-фазовой части модели объекта,
18 - блок идентификации.
Входом системы является положительный вход первого вычитателя 2. Выходом системы является выход объекта управления 1.
В качестве блока идентификации может быть использован микроконтроллер или его часть с соответствующей программой, оснащенный АЦП на каждом входе.
Все элементы системы, кроме объекта управления, могут быть реализованы на том же или на другом микроконтроллере, оснащенном АЦП на каждом входе, кроме входов элементов 13, 14 и 17, соединенных с идентификатором, которые могут быть цифровыми - в этом случае АЦП не требуют.
Таким образом, все устройства, кроме объекта управления, могут быть реализованы по отдельности в форме цифровых устройств, или совместно в форме элементов общей программы управления объектом.
Эта система работает следующим образом.
В исходном состоянии математическое описание объекта управления 1, приблизительно известно и регулятор 3 удовлетворительно настроен, что обеспечивает приемлемое качество управления. Хотя математическое описание объекта 15 может быть условно разбито на два последовательно соединенных элемента 13 - и имитатор математического описания минимально-фазовой части объекта, 14 - имитатор математического описания звена запаздывания объекта 14, физическая модель такого разбиения не имеет, и для измерения доступен только выход объекта 1, а воздействие может подаваться только на вход объекта 1. На имитатор математического описания объекта 15 поступают те же сигналы, что и на сам объект управления 1, поэтому выходные сигналы блока 15 должны совпадать с выходными сигналами объекта 1. Вследствие действия внешних условий объект 1 со временем постепенно изменяется, что вызывает появление отличий сигналов на выходе объекта 1 от сигналов на выходе блока 15. Блок идентификации 18 осуществляет анализ соответствия выходных сигналов блока 15 выходным сигналам реального объекта 1. Если выявляется отклонения этого соответствия, в блок 15 вносятся уточняющие изменения. С этой целью на вход блока 15 поступают управляющие сигналы от блока идентификации. Поэтому вследствие постоянного уточняющего действия блока идентификации МО блока 15 соответствует МО объекта 1 с учетом накопленных изменений. Вследствие того, что МО блока 15 соответствует МО реального объекта 1, сигнал на выходе блока 15 соответствует сигналу на выходе объекта 1. Сигнал на выходе элемента 13 соответствует сигналу, который был бы сформирован объектом при отсутствии в нем инерционного звена. Поэтому обратная связь, замыкаемая через элементы 13 и 10, не содержит звена запаздывания. Такая обратная связь легко может обеспечить высокую точность и хорошее быстродействие, а также хороший запас устойчивости. После того как любое изменение в контуре породит сигнал, который полностью пройдет через объект 1 и сформирует задержанный отклик на его выходе, точно такой же отклик будет сформирован и на выходе блока 14. Отклик реального объекта будет воздействовать на регулятор с отрицательным знаком, поскольку пройдет через один вычитатель 2, а отклик блока 15 скомпенсирует остатки отклика, который ранее был сформирован на выходе блока 13, поскольку поступит инвертирующий вход вычитателя 10, на суммирующий вход которого подается этот сигнал с выхода блока 13. Таким образом, упреждающий отклик блока 13 действует лишь на то время, пока не будет сформирован отклик с выхода реального объекта. Вследствие действия адаптивного контура, образуемого блоком идентификации, МО объекта соответствует реальному объекту, поэтому контур упреждения работает эффективно.
Иными словами, в случае полного соответствия МО блока 15 МО реального объекта 1, система работает так же, как прототип.
В случае медленного изменения одного или нескольких параметров объекта действие блока идентификации обеспечивает определение новых значений этих параметров, например, методом слежения. Поэтому блок 15 остается полностью соответствующим реальному объекту управления 1. С этой целью блок идентификации анализирует, как минимум, выходные сигналы объекта и модели, сравнивает их и по результату сравнения вычисляет новые уточненные значения МО и отправляет эти значения в блок 15, а также в блок 17.
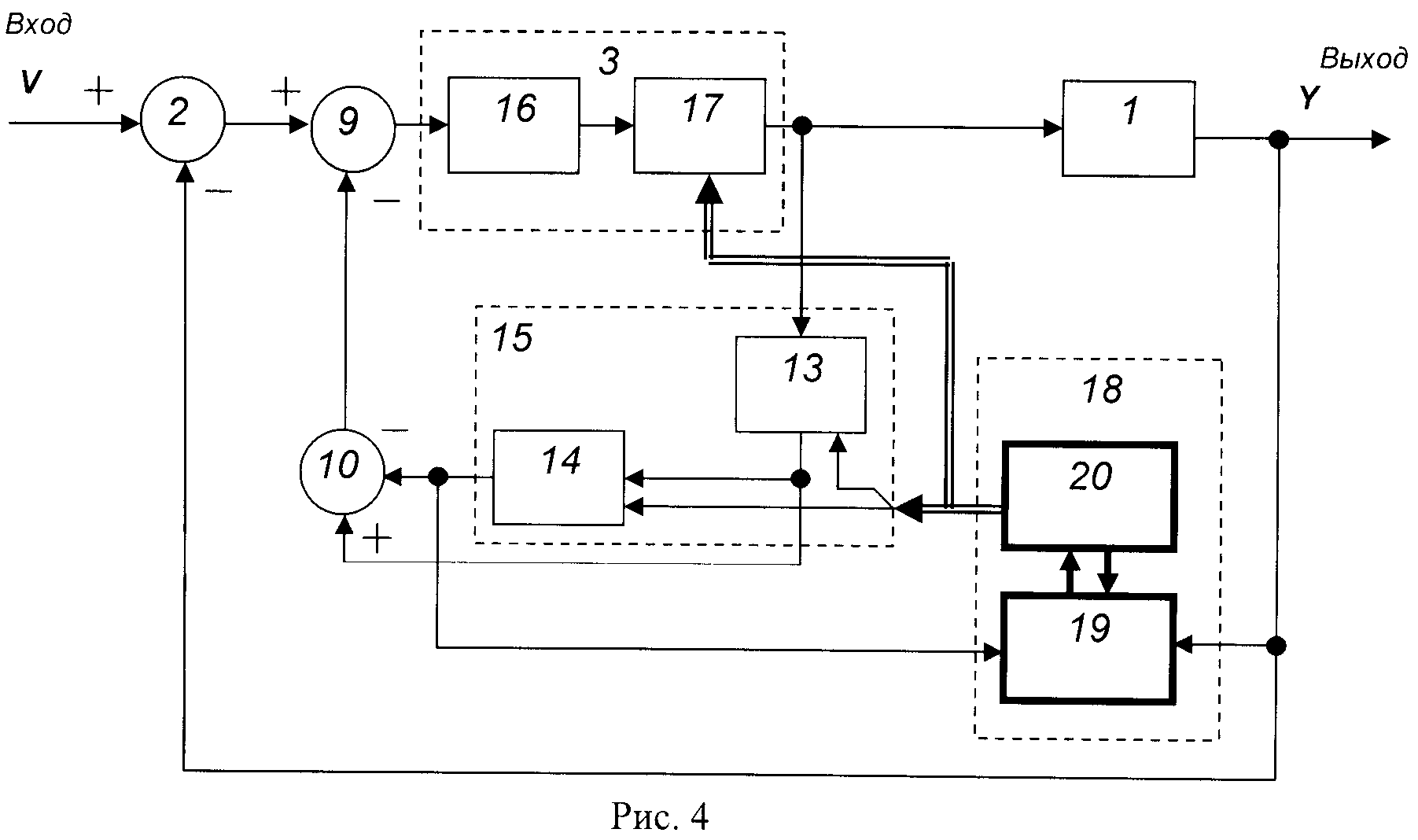
Блок идентификации может быть организован по схеме, показанной на рис.4. На этой схеме
1 - объект управления,
2 - первый вычитатель,
3 - регулятор,
9 - второй вычитатель,
10 - третий вычитатель,
13 - имитатор математического описания минимально-фазовой части объекта,
14 - имитатор математического описания звена запаздывания объекта,
15 - имитатор математического описания объекта управления,
16 - имитатор желаемого математического описания разомкнутого контура,
17 - имитатор математического описания обратной структуры объекта,
18 - блок идентификации,
19 - коррелятор,
20 - блок оптимальной настройки.
Блок идентификации 18 действует следующим образом. Выходной сигнал имитатора математического описания объекта управления 15 поступает на коррелятор 19, на второй вход которого поступает выходной сигнал объекта управления 1. Блок оптимальной настройки 20 вводит медленную небольшую девиацию в параметры МО и определяет, достигает ли величина корреляционной функции, формируемой на выходе коррелятора 19, своего наивысшего значения при штатном (среднем) значении исследуемого параметра МО, или же она увеличивается при увеличении или уменьшении этого параметра. В первом случае параметр МО остается неизменным, во втором случае этот параметр увеличивается или уменьшается на небольшую величину в том направлении, которое соответствует увеличению значения корреляционной функции. Таким образом, исследуемый параметр МО изменяется до тех пор, пока значение корреляционной функции не будет максимальным, а это имеет место при равенстве параметра МО соответствующему параметру объекта.
Таким образом, уточнение искомого параметра МО осуществляется с помощью блока идентификации 18.
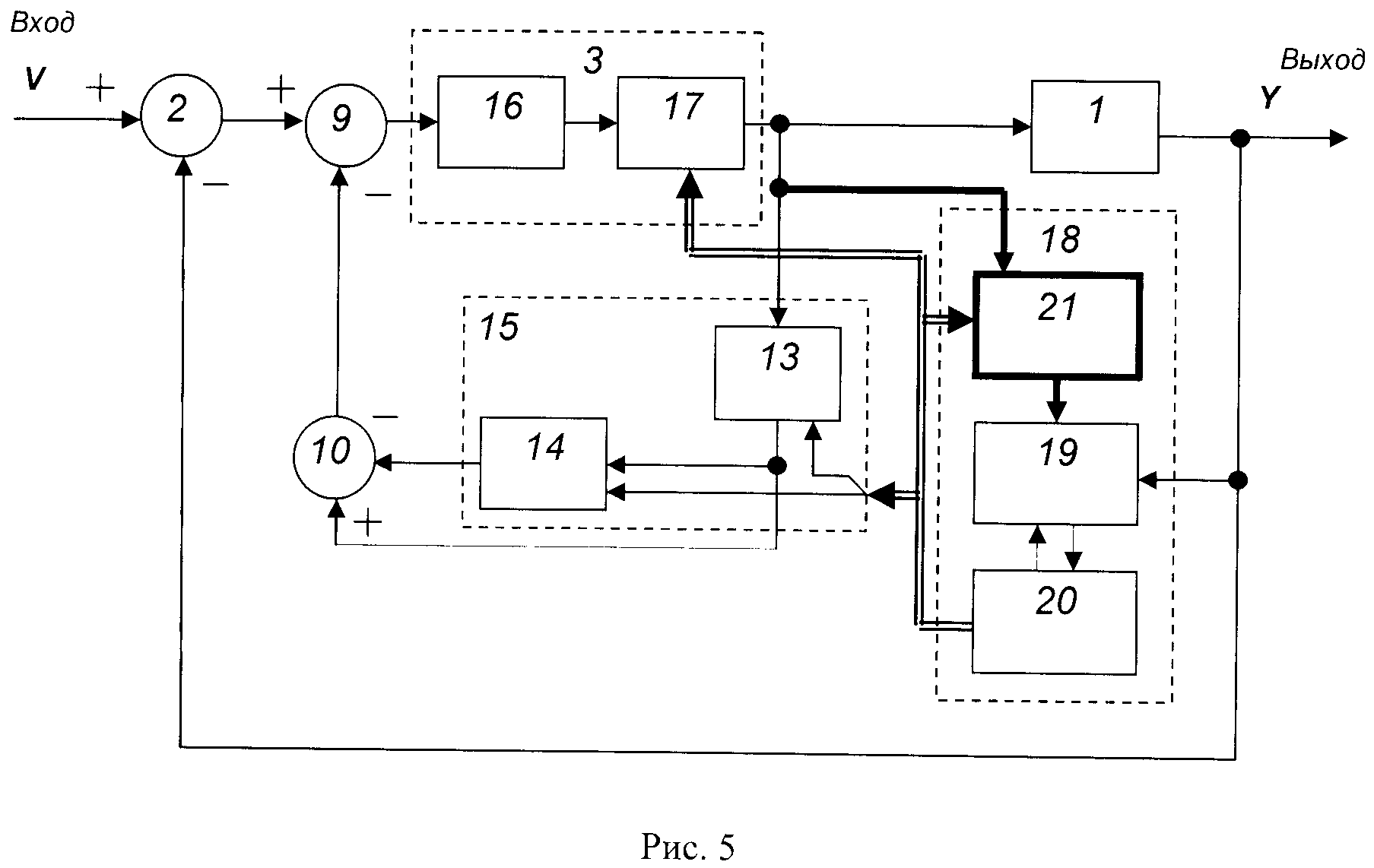
Данное устройство можно дополнительно улучшить, если ввести в него, по меньшей мере, один дополнительный перестраиваемый ИМО, выход которого соединен только с коррелятором. В этом случае в блок 15 не требуется вносить девиацию, что позволяет более точно обеспечить соответствие МО 15 реальному объекту 1 не только в среднем, но и в течение каждого момента времени.
Схема соответствующего устройства показана на рис.5.
На этом рисунке:
1 - объект управления,
2 - первый вычитатель,
3 - регулятор,
9 - второй вычитатель,
10 - третий вычитатель,
13 - имитатор математического описания минимально-фазовой части объекта,
14 - имитатор математического описания звена запаздывания объекта,
15 - имитатор математического описания объекта,
16 - имитатор желаемого математического описания разомкнутого контура,
17 - имитатор математического описания обратной структуры минимально-фазовой части модели объекта,
18 - блок идентификации,
19 - коррелятор,
20 - блок оптимальной настройки,
21 - управляемый имитатор математического описания объекта в составе блока идентификации.
В отличие от исходной системы, в данной системе на блок 15, участвующий в формировании сигнала обратной связи, не поступает от блока оптимальной настройки команд, под влиянием которых исследуемые параметры МО в этом блоке осуществляли бы небольшую девиацию. Поэтому блок 15 получает лишь команды о плавном изменении параметров для достижения большего соответствия с реальным объектом 1. Функции быстро перестраиваемого МО, девиация параметров которой необходима для настройки на наиболее полное соответствие ее реальному объекту путем поиска максимума корреляции выходных сигналов, выполняет - управляемый имитатор математического описания объекта в составе блока идентификации. Это позволяет более точно осуществлять формирование сигналов обратной связи с помощью блока 15.
В результате система поисковые девиации, осуществляемые под действием блока оптимальной настройки, не влияют на действие системы, поэтому система действует более успешно. Это позволяет повысить точность и быстродействие системы.
Таким образом, предлагаемая система адаптации обеспечивает эффективную адаптацию объекта управления, за счет повышения точности и быстродействия системы, а также улучшение ее динамических свойств.
Электромеханический усилитель руля
Способ управления двухкатушечным электромагнитным двигателем ударного действия
Делитель мощности
Дипольный излучатель
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку при ее несимметрии
Синхронный бесконтактный генератор
Многозонный матричный преобразователь частоты
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку
Способ управления двунаправленными ключами в трехфазном трехуровневом полупроводниковом выпрямителе с емкостным делителем напряжения
Электромеханический усилитель руля
Способ управления двухкатушечным электромагнитным двигателем ударного действия
Делитель мощности
Дипольный излучатель
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку при ее несимметрии
Синхронный бесконтактный генератор
Многозонный матричный преобразователь частоты
Способ управления статическими стабилизированными источниками переменного напряжения, работающими параллельно на общую нагрузку
Способ управления двунаправленными ключами в трехфазном трехуровневом полупроводниковом выпрямителе с емкостным делителем напряжения

