Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области радионавигации, а именно к определению местоположения подвижного объекта.
Известен способ определения пространственной угловой ориентации подвижного объекта из описания к патенту РФ 2112926 МПК G01C 19/06, опубликован 10.06.1998. Способ предназначен для использования в инерциальных навигационных системах. Способ включает периодически реверсируемое вращение платформы относительно оси, жестко связанной с объектом. Измеряют проекции абсолютной угловой скорости и угол поворота платформы относительно объекта. Вычисляют текущие значения пространственной угловой ориентации подвижного объекта.
Известен также способ определения координат движущихся объектов из работы Васильева Ю. и Камышова А. «Система определения координат движущихся объектов с лазерным сопровождением». Журнал «Компоненты и технологии», №9, 2005 год. Координаты движущихся объектов регистрируются теплопеленгатором. Точность регистрации координат зависит от точности системы слежения пеленгатора и наведения лазерного сигнала на движущийся объект.
Известен способ определения координат подвижного объекта в трехмерном пространстве (патент РФ 2267797 С2, МПК G01S 3/14, опубликован 10.01.2006. «Способ определения координат летательного аппарата (ЛА) и устройство на его основе»). По максимальному количеству сходных существенных признаков этот способ принимается за прототип.
Известный способ заключается в формировании радионавигационной системой с вычислительным комплексом двух наземных источников излучения по азимуту и по углу места. При этом сигналы источников излучения модулируют во времени набором частот, каждая из которых соответствует определенному значению угла поворота антенны. На борту ЛА принимают сигналы азимута и угла места и определяют по частоте модуляции принятого сигнала угловые координаты ЛА. Формируют сигналы в виде набора импульсов, соответствующих кодированному значению дальности, и производят на борту ЛА расшифровку кода дальности. Способ обеспечивает повышенную безопасность полета и может быть использован с высокой точностью в зоне ближней навигации, а также при взлете и посадке. Однако скорость распространения электромагнитных сигналов радионавигационной системы зависит от среды распространения, которая неоднородна, особенно с увеличением высоты полета (стратосфера, тропосфера). В этих случаях наблюдается рефракция сигналов, которая вносит погрешности в измерения координат.
Задача, решение которой осуществляется заявляемым способом, заключается в повышении точности определения пространственных координат подвижного объекта с помощью вычислительного комплекса радионавигационной системы пространственных координат подвижного объекта за счет учета погрешностей, вызванных рефракцией электромагнитных сигналов радионавигационной системы спутника при прохождении неоднородных слоев атмосферы.
Сущность предлагаемого способа как технического решения выражается следующей совокупностью существенных признаков.
Как и в прототипе, в заявляемом способе сигналы излучаются радионавигационной системой, принимаются и обрабатываются с последующим определением координат подвижного объекта в трехмерной системе координат.
В отличие от прототипа учитываются погрешности координат, вызванные рефракцией электромагнитных сигналов радионавигационной системы спутника при прохождении их в различных слоях атмосферы. Погрешности определяют через мнимое местоположение спутника. Определяют координаты мнимого положения спутника. Сравнивают его с реальным положением спутника. Рассчитывают погрешности этих координат. При этом погрешности в определении мнимых координат спутника такие же, как и для объекта. Поэтому корректируют координаты положения подвижного объекта с учетом этих же погрешностей.
Технический результат, который может быть получен при реализации заявляемого способа, заключается в повышении точности определения пространственных координат объекта за счет учета погрешностей, вызванных рефракцией.
Сущность заявляемого способа поясняется чертежом, где на фигуре 1 изображена схема определения пространственных координат подвижного объекта, получающего сигналы от радионавигационной системы спутника.
- Ср - реальное положение спутника с координатами X Y Z.
- См - мнимое положение спутника с координатами х y z.
- Пунктиром обозначена траектория прохождения сигнала через атмосферу и через ионный слой.
- Bp - реальное положение объекта с координатами Хв, Yв, Zв.
- Вм - мнимое положение объекта с координатами хв yв zв.
- α - угол между горизонтальным вектором и направлением на спутник.
Заявляемый способ определения пространственных координат подвижного объекта осуществляется следующим образом (фиг.1). Сигналы распространяются от радионавигационной системы реального спутника С, координаты которого известны С (X Y Z). Проходя через атмосферу, сигналы искажаются. Искажение обусловлено уменьшением коэффициента преломления n атмосферы с увеличением высоты n=c/v, где
с - скорость распространения сигналов в вакууме,
ν - скорость распространения сигналов в среде с коэффициентом n. Для сигналов от радионавигационной системы спутника и подвижного объекта наибольшее влияние на эту скорость оказывают слои ионосферы и тропосферы, в которых скорость имеет эффект замедления. Коэффициент преломления ионосферы n<1. При прохождении слоя ионосферы траектория сигнала от радионавигационной системы спутника С до объекта В отлична от прямой линии. Все решения уравнений 1, 2, 3, 4, 5 обеспечиваются вычислительным комплексом радионавигационной системы. Определяются координаты мнимого положения объекта Вм (хв yв zв). Определяется положение мнимого спутника См, а реальное положение спутника Ср известно. Мнимое положение подвижного объекта - Вм (хв yв zв). Реальное положение подвижного объекта Bp (Хв Yв Zв). Координаты мнимого положения спутника См (х у z) вычисляют по формулам

где D - мнимая дальность до объекта Bp.
Угол α дает линию визирования не на реальное положение спутника Ср, а на его мнимое положение на расстоянии D от объекта Вм (хв yв zв).
Уравнение прямой, проходящей через мнимое местоположение спутника См в направлении α,

Уравнение

связывает зависимостью координаты реального положения спутника Ср и мнимого См, где r -ошибка определения реального положения спутника, взятая по модулю.
Решение системы уравнений 1, 2 и 3 дает значения мнимых координат спутника См (x y z).
Таким образом, получив мнимые координаты спутника и зная реальные координаты, можно определить погрешности

Погрешности определения мнимого положения спутника См такие же, как и объекта Вм.
Тогда реальные координаты объекта Bp (Хв Yв Zв) выглядят следующим образом:

Полученная математическая модель позволяет уменьшить погрешности координат, вызванные рефракцией сигналов в атмосфере в зависимости от условий полета, состояния атмосферы, времени года, суток и того подобного.
Определяют погрешности Δх, Δy, Δz, так как погрешности в определении координат мнимого положения спутника См такие же, как и для объекта Bp. С помощью вычислительного комплекса радионавигационной системы корректируются координаты мнимого положения подвижного объекта Вм с учетом погрешностей Δх, Δy, Δz и определяют пространственное положение подвижного объекта Bp.
Достигаемый технический результат заявляемого способа обеспечивается учетом погрешностей в определении пространственных координат подвижного объекта. Способ определения координат обладает повышенной точностью благодаря учету погрешностей, вызванных рефракцией сигналов в атмосфере, так как постоянно отслеживают текущее состояние атмосферы, а не ее статистические модели. Модель состояния атмосферы вокруг аэропорта, тропосферная и ионосферная модели не дают требуемой точности. Для беспилотных подвижных объектов на основе получения информации о пространственном положении с помощью заявляемого способа можно решать задачи стабилизации траектории полета без дорогостоящего инерциального оборудования.
Способ определения пространственных координат подвижного объекта реализуется радионавигационной системой спутника и подвижного объекта с вычислительным комплексом.
Список литературы
1) Патент РФ 2267797 С2, МПК G011 S3/14, G01C 23/00. Опубликован 10.01.2006. «Способ определения координат летательного аппарата и устройство на его основе»;
2) Васильев Ю., Камышов А., «Система определения координат движущихся объектов». Журнал «Компоненты и технологии», №9, 2006 год;
3) Патент РФ 2112926 С1, МПК G01C 19/66. Опубликован 10.06.1998. «Способ определения пространственной угловой ориентации подвижного объекта»;
4) Шебшаевич B.C. и др. «Сетевые спутниковые радионавигационные системы», М.: Радио и связь, 1993 г.
Способ определения пространственных координат подвижного объекта, включающий излучение сигналов радионавигационной системой спутника с вычислительным комплексом, прием и обработку их на объекте с последующим определением пространственных координат подвижного объекта, отличающийся тем, что при этом дополнительно учитываются погрешности пространственных координат, вызванные рефракцией сигналов, излучаемых известной радионавигационной системой реального спутника с известными координатами, для чего с помощью вычислительного комплекса радионавигационной системы реального спутника определяются координаты мнимого положения спутника, сравниваются с известными координатами реального положения спутника, определяются погрешности этих координат, после чего корректируются координаты подвижного объекта с учетом погрешностей координат положения спутника, учитывая, что погрешности координат положения спутника такие же, как и для подвижного объекта.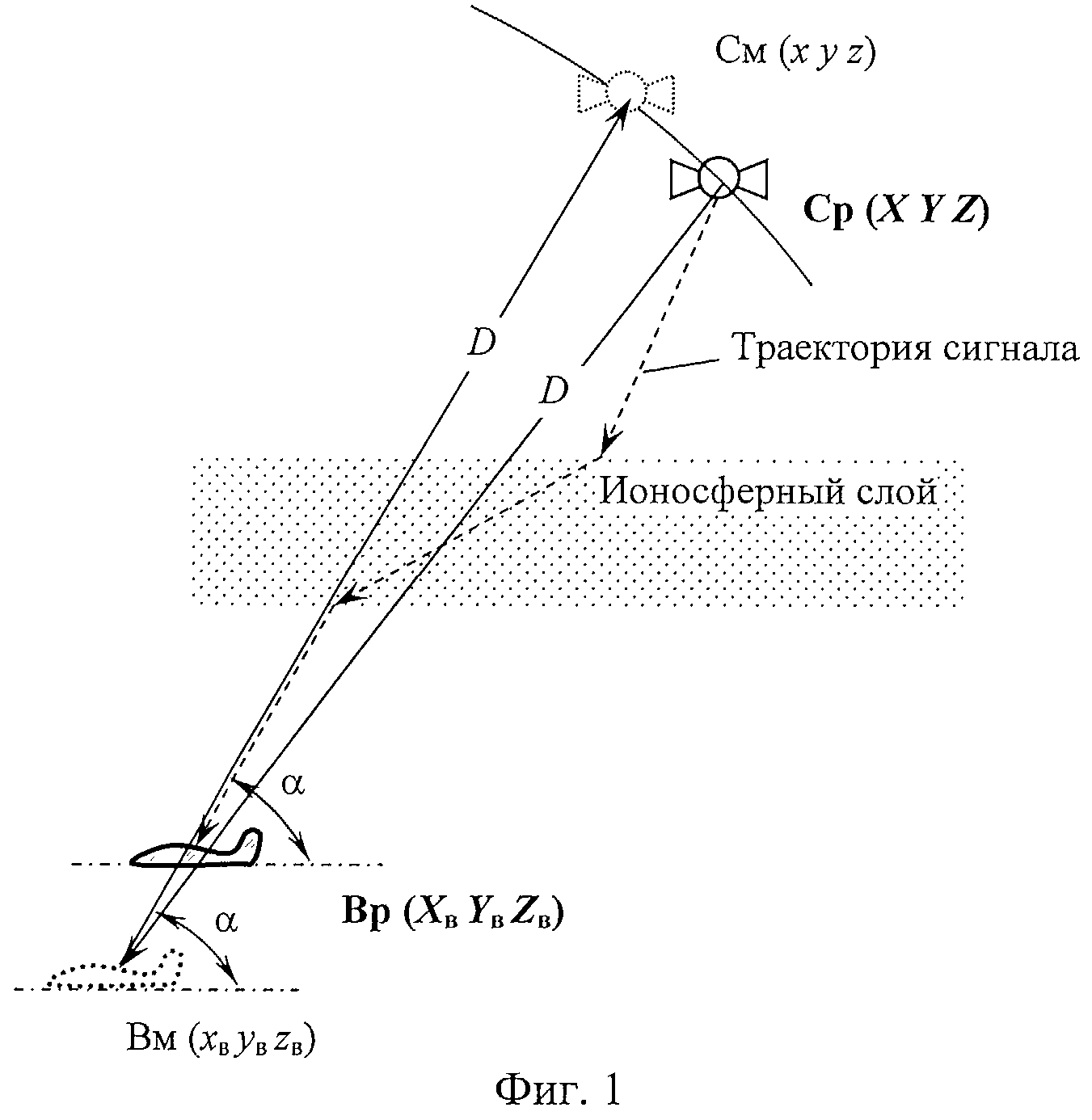
Способ обучения пилотов
Способ обучения пилотов

