Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА САМОНАВОДЯЩИМСЯ СНАРЯДОМ
Вид РИД
Изобретение
Изобретение относится к области разработки систем управления беспилотными летательными аппаратами и может быть использовано в комплексах управляемого артиллерийского вооружения и других комплексах вооружения, в которых на конечном участке траектории осуществляется самонаведение по методу пропорциональной навигации.
Известен способ формирования сигналов управления артиллерийским управляемым снарядом по методу пропорциональной навигации [В.И.Бабичев, В.В.Ветров, А.В.Игнатов, А.Р.Орлов. «Основы устройства и функционирования артиллерийских управляемых снарядов», Тула, издательство ТулГУ, 2003 г., с.107-111), принятый за прототип, включающий определение следящей гироскопической головкой самонаведения (ГСН) в момент приема сигнала подсвета цели амплитудно-модулированного сигнала, пропорционального угловой скорости линии визирования цели, поступающего в обмотки коррекции гироскопической ГСН, преобразование амплитудно-модулированного сигнала ГСН в широтно-модулированный сигнал, управляющий релейным рулевым приводом снаряда.
Отличительной особенностью артиллерийских управляемых снарядов, обусловленной ограничением размеров оперения планера снаряда при необходимости создания требуемой располагаемой перегрузки планера, является малый декремент затухания собственных колебаний планера, что приводит к увеличению амплитуды колебаний снаряда по углам атаки и скольжения. Увеличение амплитуды колебаний снаряда может приводить к потере устойчивости планера, а также к соударению ротора гироскопической головки самонаведения с корпусом снаряда вследствие конструктивного ограничения угла прокачки последней, что приводит к необходимости ограничения коэффициента пропорциональной навигации и к уменьшению вероятности попадания снаряда в цель.
Задачей предлагаемого изобретения является разработка способа управления артиллерийским вращающимся по углу крена самонаводящимся снарядом, позволяющего обеспечить уменьшение амплитуды колебаний снаряда по углам атаки и скольжения.
Решение поставленной задачи достигается тем, что в способе формирования сигналов управления вращающимся по углу крена снарядом, включающем определение следящей гироскопической головкой самонаведения в момент приема сигнала подсвета цели амплитудно-модулированного сигнала, пропорционального угловой скорости линии визирования цели, преобразование амплитудно-модулированного сигнала в широтно-модулированный сигнал, управляющий рулевым приводом снаряда, введено преобразование в широтно-модулированный сигнал в момент приема сигнала подсвета цели и в момент, равный половине периода подсвета цели, суммы амплитудно-модулированного сигнала и отфильтрованного фильтрами помеховой и постоянной составляющей сигнала угловой скорости снаряда.
Увеличение декремента затухания снаряда обеспечивается за счет охвата снаряда обратными связями по угловой скорости снаряда. При введении сигналов угловой скорости снаряда эквивалентный декремент затухания снаряда ξэкв увеличивается в соответствии с зависимостью
где κa, κрп, κпл - коэффициенты передачи аппаратуры, рулевого привода, планера снаряда;
κсд - коэффициент, определяющий величину сигнала угловой скорости снаряда в сигнале управления снарядом;
ξпл, Tпл, τпл - декремент затухания и постоянные времени планера снаряда.
Сигнал угловой скорости снаряда измеряется датчиками угловой скорости снаряда, расположенными в экваториальной плоскости снаряда (ДУСy, z). Коэффициент передачи ДУС κсд выбирается таким образом, чтобы обеспечить требуемый декремент затухания собственных колебаний планера.
Длительность широтно-модулированных сигналов при управлении по методу пропорциональной навигации определяется в соответствии с зависимостью
 ,
,
где τy,z - длительности сигналов управления в связанной со снарядом вращающейся по крену системе координат;
τmax - максимальная длительность сигналов управления, определяемая частотой подсвета цели;
 - угловая скорость линии визирования цели в связанной со снарядом, вращающейся по углу крена системе координат;
- угловая скорость линии визирования цели в связанной со снарядом, вращающейся по углу крена системе координат;
 - линейная зона по сигналу управления - угловая скорость линии визирования цели, при которой формируется сигнала управления максимальной длительности.
- линейная зона по сигналу управления - угловая скорость линии визирования цели, при которой формируется сигнала управления максимальной длительности.
Линейная зона по сигналу управления определяет пеленгационную характеристику ГСН - зависимость коэффициента команды ГСН от угловой скорости линии визирования цели. Под коэффициентом команды будем понимать нормированную величину, определяемую в соответствии с зависимостью
где Kk(t) - коэффициент команды в невращающейся по крену системе координат;
Y(t) - сигнал в невращающейся по крену системе координат, равный
Y(t)=Uy(t)·cosγ+Uz(t)·sinγ;
Uy(t), Uz(t) - сигналы на входе РП во вращающейся по крену системе координат;
Т - период вращения снаряда по крену; t - текущее время;
γ - угол крена снаряда, равный γ=ωвр·t, где ωвр - частота вращения снаряда по крену, равная ωвр=2π/T.
Длительность сигнала управления по сигналу угловой скорости ДУС определяется в соответствии с зависимостью
 ,
,
где ωy,z - угловая скорость снаряда в связанной со снарядом вращающейся по углу крена системе координат, измеренная датчиками угловой скорости снаряда (ДУСy, z).
Сигналы угловой скорости линии визирования цели и угловой скорости снаряда алгебраически суммируются на входе схемы ШИМ.
В качестве датчиков угловых скоростей колебаний снаряда в связанной системе координат применяется микромеханический датчик (ММГ) ADXRS300, ADXRS453 фирмы Analog Devices. Передаточная функция ММГ по сигналу угловой скорости определяется в соответствии с зависимостью
где Tсд - постоянная времени ДУС, определяемая требуемой полосой пропускания ДУС. Запаздывание, вносимое ДУС при измерении угловой скорости колебаний снаряда, компенсируется фазовым разворотом ДУС относительно плоскости рулей снаряда.
Для фильтрации в сигналах ДУСy, z постоянной составляющей, возникающей в связи с неточностью установки ДУС в продольной плоскости, применяется фильтрация сигналов ДУС фильтром постоянной составляющей. Передаточная функция фильтра постоянной составляющей определяется в соответствии с зависимостью
где Tф - постоянная времени фильтра, определяемая требуемым быстродействием фильтра.
Для исключения запаздывания фильтра постоянной составляющей, возникающего в переходном процессе, обусловленном нулевыми начальными значениями на фильтр, управление по сигналам ДУС производят после окончания переходного процесса в фильтре постоянной составляющей.
Частота формирования управляющих сигналов ГСН определяется частотой подсвета цели. В момент прихода импульса подсвета цели формируются амплитудно-модулированные сигналы, пропорциональные угловой скорости линии визирования цели, которые затем преобразуются в широтно-модулированные сигналы, управляющие рулевым приводом снаряда. Сигналы ДУС суммируются с амплитудно-модулированными сигналами ГСН в момент прихода импульса подсвета цели и через полпериода подсвета цели. Частота суммирования сигналов ДУС с сигналами ГСН определяется допустимыми искажениями, вносимыми в спектр сигналов ДУС при дискретизации съема сигналов.
Отличительной особенностью ММГ является зависимость сигналов ММГ от ускорений, действующих на ММГ, вызванных механическим "стуком" подвижных частей электромагнитов РП, приводящих к возникновению помеховых импульсов в сигналах ММГ. Величина помеховых импульсов соизмерима, а в некоторых случаях и превышает полезный сигнал угловой скорости снаряда.
Фильтрация в сигналах ДУС помеховых импульсов осуществляется фильтрами помеховых импульсов.
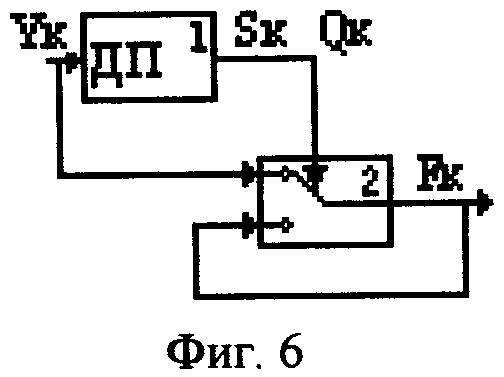
Алгоритм фильтрации основан на запоминании сигнала ДУС, предшествующего скачкообразному изменению сигнала. Частота сигнала ДУС, поступающего в фильтр помеховых импульсов, выбиралась таким образом, чтобы изменение полезного сигнала за один шаг фильтрации не превышало пороговый уровень фильтра при отсутствии помеховых импульсов и превышало пороговый уровень при возникновении помеховых импульсов. Длительность времени запоминания сигнала ДУС определялась продолжительностью помехового импульса. Алгоритм фильтра помеховых импульсов определяется следующими зависимостями:
на первом шаге
Q1=0; F1=Y1;
начиная со второго шага
 ;
;
где k - номер шага выбранной частоты;
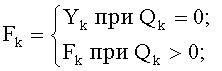
Y - сигнал ММГ на входе фильтра помеховых импульсов;
F - сигнал на выходе фильтра помеховых импульсов;
Δ - абсолютное значение скорости нарастания сигнала;
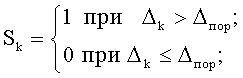
Δпор - пороговое значение сигнала фильтра помеховых импульсов;
S - признак наличия помехового импульса;
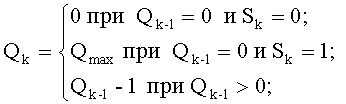
Q - признак «отсечения» помехового импульса;
Qmax - счетчик продолжительности запоминания сигнала при наличии помехового импульса.
По результатам математического моделирования применение указанного фильтра помеховых импульсов позволяет увеличить вероятность попадания снаряда в цель при наличии импульсных помех.
Предлагаемый способ формирования сигналов управления поясняют графические материалы, приведенные на фиг.1-6.
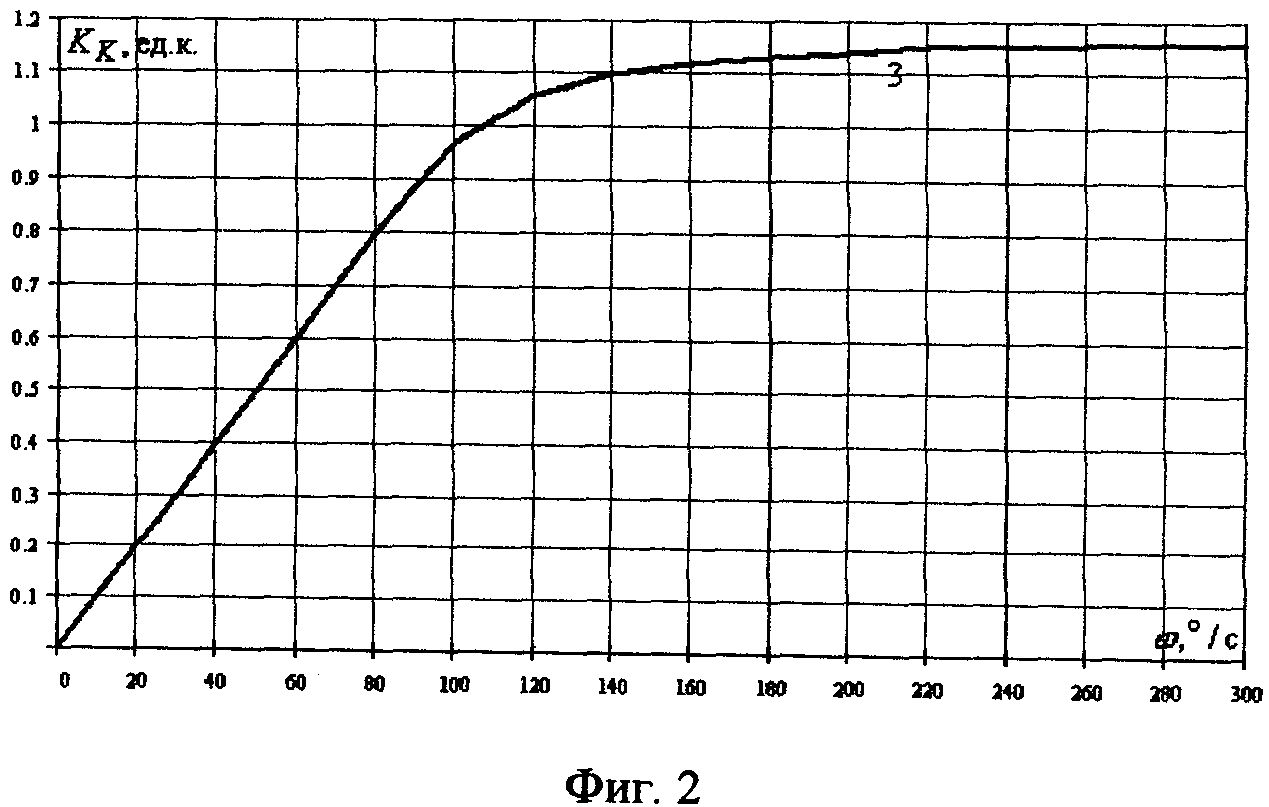
На фиг.1 приведена пеленгационная характеристика ГСН по сигналу управления, на фиг.2 - пеленгационная характеристика ГСН по сигналу угловой скорости снаряда.
На фиг.1, 2 обозначено:
1 - пеленгационная характеристика по угловой скорости линии визирования;
2 - линеаризованная пеленгационная характеристика по угловой скорости линии визирования, определяемая в соответствии с зависимостью:  ;
;
3 - пеленгационная характеристика ГСН по угловой скорости снаряда, измеренной ДУС;
Kk - коэффициент команды гироскопической ГСН, измеряемый в единицах команды (ед. к.);
 - угловая скорость линии визирования цели, °/с.
- угловая скорость линии визирования цели, °/с.
Из фиг.1 видно, что при угловой скорости линии визирования цели, равной 1°/c, коэффициент команды ГСН составляет 0.7 ед.к., коэффициент передачи ГСН равен 0.8 ед.к./(°/c). Пеленгационная характеристика ГСН смещена по оси абсцисс, что обусловлено собственным уходом ГСН. Пеленгационная характеристика ГСН по сигналу ДУС, приведенная на фиг.2, определена при коэффициенте передачи ГСН, равном 0.8 ед.к./(°/c), коэффициенте передачи ДУСy, z, равном 0.012 (°/c)/(°/c).
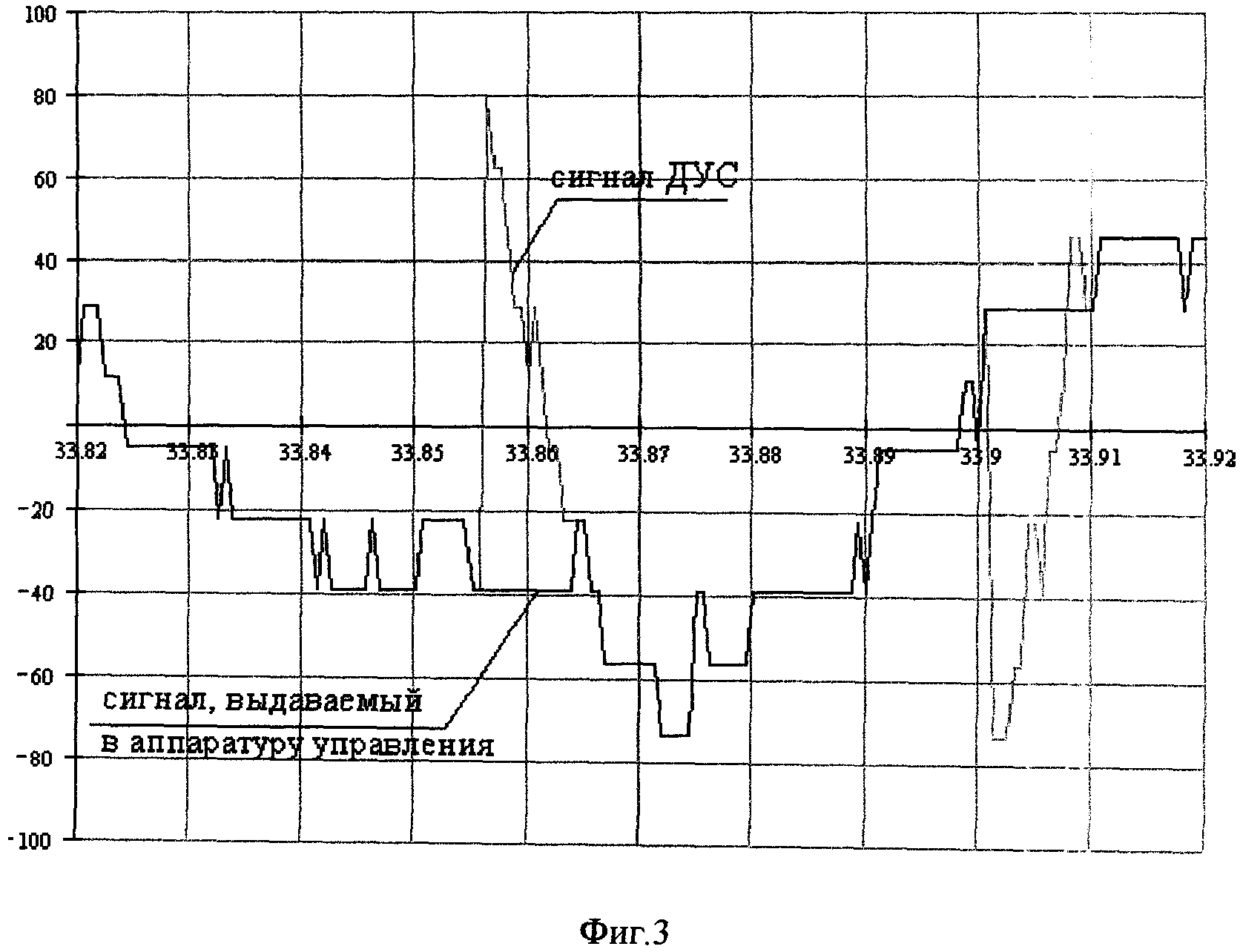
На фиг.3 представлен сигнал ДУС, содержащий помеховый импульс, обусловленный «стуком» подвижных частей электромагнитов РП, а также сигнал ДУС, отфильтрованный фильтром помеховых импульсов.
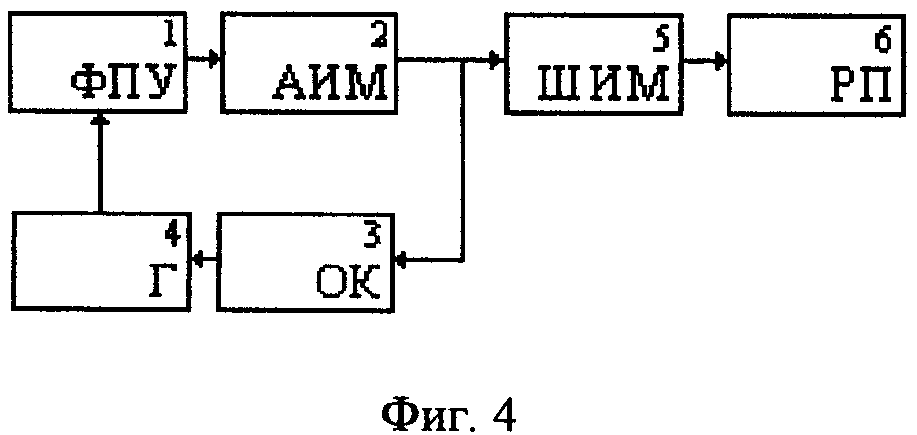
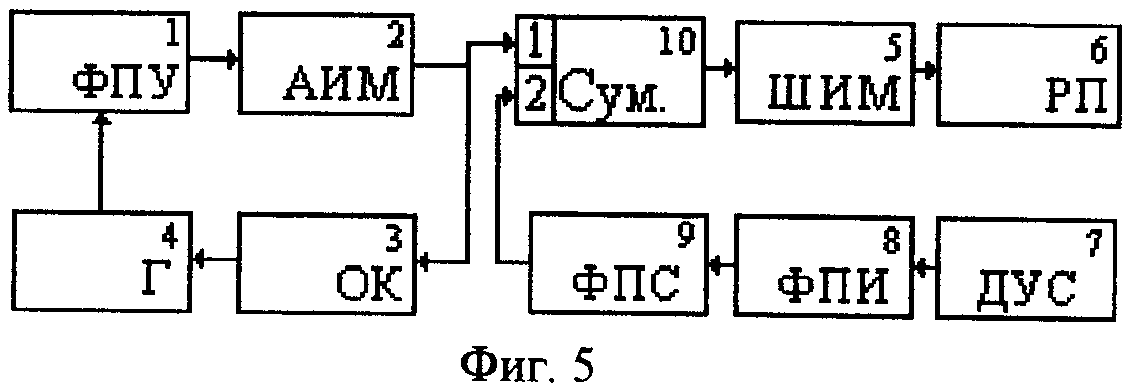
На фиг.4 представлен способ формирования управляющих сигналов, представленный в прототипе, на фиг.5 - предлагаемый способ. На фиг.4, 5 обозначено:
1 - фотоприемное устройство (ФПУ);
2 - амплитудно-импульсный модулятор (АИМ);
3 - обмотки коррекции (ОК) гироскопической головки самонаведения;
4 - гирокоординатор (Г);
5 - широтно-импульсный модулятор (ШИМ);
6 - рулевой привод (РП);
7 - датчик угловой скорости колебаний оси снаряда (ДУС);
8 - фильтр помеховых импульсов (ФПИ) в сигналах ДУС;
9 - фильтр постоянной составляющей (ФПС) в сигналах ДУС;
10 - сумматор (Сум.) сигналов ГСН и ДУС.
На фиг.6 представлен алгоритм фильтрации помеховых импульсов.
На фиг.6 обозначено:
1 - датчик помеховых импульсов (ДП);
2 - формирователь сигналов (Ф);
Yк, Sк, Qк, Fк - сигналы фильтра помеховых импульсов.
Способ формирования, приведенный в прототипе (фиг.4), реализуется следующим образом. Сигнал ГСН, формируемый ФПУ (1) и пропорциональный рассогласованию ГСН-цель, поступает в амплитудно-импульсный модулятор (2), где преобразуется в импульсы определенной длительности, амплитуда которых пропорциональна сигналу ФПУ. Амплитудно-модулированный сигнал поступает в обмотку коррекции (3). Сигнал в обмотке коррекции разворачивает гирокоординатор (4) в сторону цели, обеспечивая слежение ГСН за целью. Амплитудно-модулированный сигнал преобразуют в широтно-импульсном модуляторе (5) в импульсы постоянной амплитуды, длительность которых пропорциональна амплитуде АИМ-сигнала. Сигнал с выхода ШИМ поступает на вход РП.
Предлагаемый способ формирования управляющих сигналов (фиг.5) отличается тем, что в широтно-модулированный сигнал преобразуют сумму амплитудно-модулированного сигнала, поступающего на первый вход сумматора (10) и отфильтрованного фильтром помеховых импульсов (8) и фильтром постоянной составляющей (9) сигнала датчика угловой скорости снаряда (7), поступающего на второй вход сумматора (10). Преобразование амплитудно-модулированного сигнала в широтно-модулированный сигнал производят в момент приема импульса подсвета цели и через полпериода подсвета цели.
Предлагаемый способ позволяет уменьшить амплитуду колебаний снаряда по углам атаки и скольжения с 10-15° до не более 2°, что уменьшает вероятность соударения ротора гироскопа ГСН с корпусом снаряда. Уменьшение амплитуды колебаний снаряда по углам атаки позволяет также увеличить коэффициент пропорциональной навигации и вследствие этого увеличить вероятность попадания снаряда в цель.
Способ формирования сигналов управления вращающимся по углу крена снарядом, включающий определение следящей гироскопической головкой самонаведения амплитудно-модулированного сигнала, пропорционального угловой скорости линии визирования цели, преобразование сигнала в широтно-модулированный сигнал, поступающий на вход рулевого привода снаряда, отличающийся тем, что в широтно-модулированный сигнал преобразуют сумму амплитудно-модулированного сигнала и отфильтрованного фильтром помеховых составляющих и фильтром постоянной составляющей сигнала датчика угловой скорости снаряда.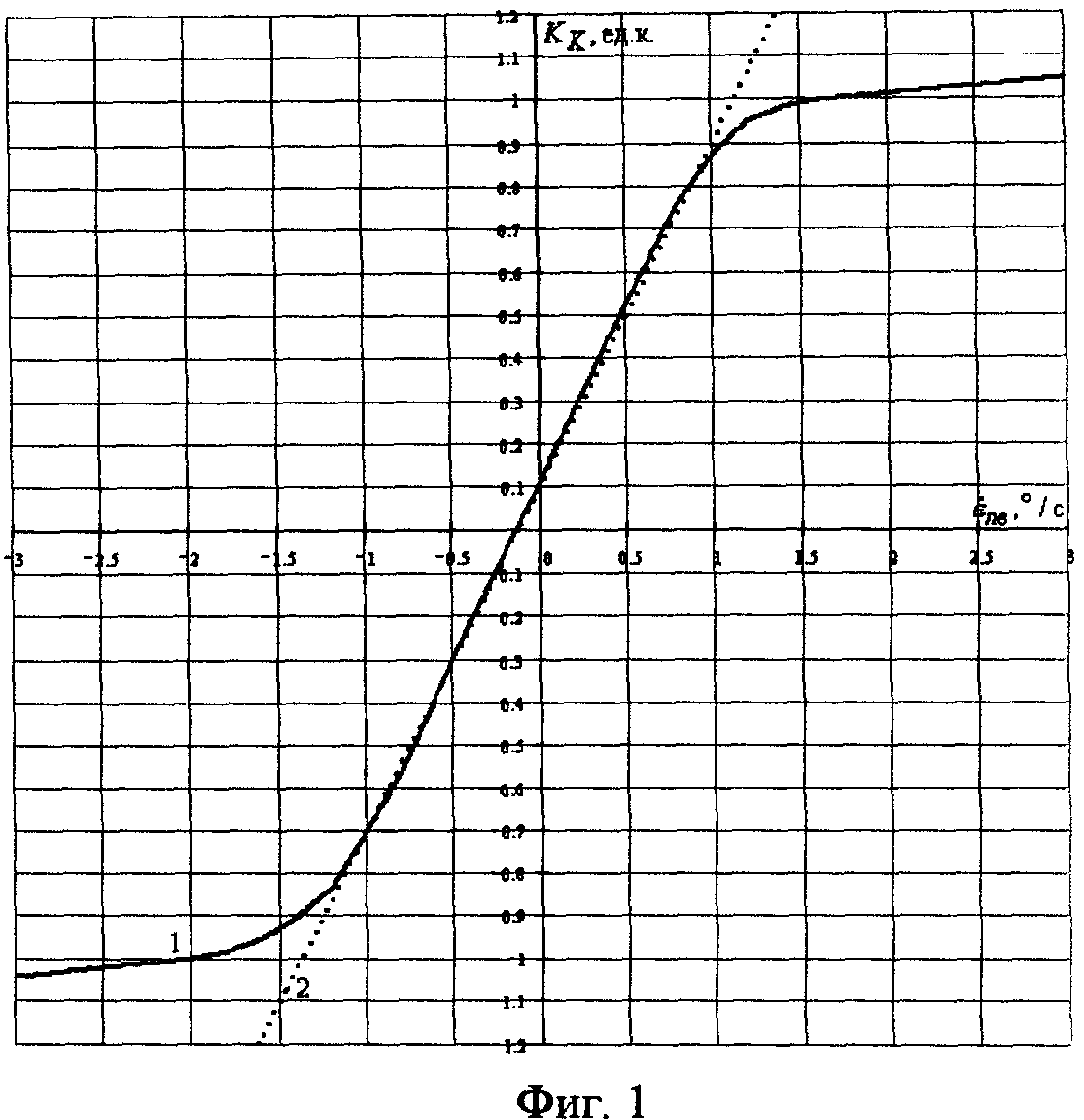
Турбокомпрессорная энергетическая установка
Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения
Способ определения угла крена бесплатформенной инерциальной навигационной системы вращающегося по крену артиллерийского снаряда
Космическая энергетическая установка с машинным преобразованием энергии
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления
Способ прямого наведения вооружения на движущуюся цель
Способ телеуправления ракетой
Способ прямого наведения вооружения на цель (варианты) и устройство ориентирования пусковой установки вооружения
Способ ориентирования орудия
Турбокомпрессорная энергетическая установка
Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения
Способ определения угла крена бесплатформенной инерциальной навигационной системы вращающегося по крену артиллерийского снаряда
Космическая энергетическая установка с машинным преобразованием энергии
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления
Способ получения антифрикционного покрытия на изделиях из металла
Способ дросселирования тяги жидкостного ракетного двигателя
Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления
Космическая энергетическая установка с машинным преобразованием энергии

