Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ
Вид РИД
Изобретение
Изобретение относится к геофизическим исследованиям скважин, проводимым как при бурении, так и при эксплуатации нефтегазовых скважин, именно для обеспечения привязки к сторонам света данных измерений геофизическими скважинными приборами с направленными датчиками, например положения перфорационных отверстий, положения механических разрушений (трещина гидроразрыва) в результате воздействия на пласт, положения изображения, сделанного скважинной фотокамерой и другими средствами.
Известны способы для измерения положения скважинного прибора в пространстве. Их применение позволяет вычислить зенитный угол θ, азимут наклонения плоскости оси скважинного прибора α, угол ориентации корпуса скважинного прибора в апсидальной плоскости наклона оси скважинного прибора φ в каждой точке траектории перемещения скважинного прибора по буровой скважине (Ковшов Г.Н., Алимбеков Р.И., Жибкр А.В., Инклинометры (основы теории и проектирования), Уфа, Гилем, 1998 г., 380 стр.). Устройства для реализации данного способа используют акселерометры или маятниковые индикаторы горизонта для измерения положения оси скважинного прибора относительно вертикали и магнитные или гироскопические компасы для определения азимута оси скважинного прибора (Исаченко В.Х., Инклинометрия скважин. - М.: Недра, 1987 г., страницы 62-154). Устройство для определения визирного угла, базирующееся на данных, получаемых с блока акселерометров, описано в Патенте РФ №2306529, G01C 21/06, 2005, а основанное на данных, получаемых с блока гироскопов, описано, например, в А.С. СССР №1788224.
Однако применение магнитных систем обуславливает ограничение в случае применения известных способов и устройств в скважинах, обсаженных стальными трубами из-за подверженности влияния магнитных масс на измерительные установки. Гироскопические компасы, свободные от ограничения работы внутри стальной колонны, сложны по своей технической реализации и обладают относительно небольшим ресурсом работы непрерывного цикла измерения вследствие накопления ошибки измерения ввиду температурного и временного дрейфа гироскопа. Акселерометры не позволяют проводить измерения относительного положения корпуса скважинного прибора при субвертикальном положении скважинного прибора.
Наиболее близким к предлагаемому является способ определения направления скважины (Патент РФ №2109943). В данном способе для определения угла наклона θ, угла φ поворота относительно верхней стороны скважины, азимутального угла ψ положения скважинного прибора применен трехосевой блок акселерометра-магнитометра, осуществляющий измерение ускорения силы тяжести gx, gy, gz известного местного вектора g ускорения силы тяжести и измерение компонентов магнитного поля Вх, By, Вz полного магнитного поля В. Здесь x, y, z - векторные компоненты в декартовой системе координат XYZ, привязанной к трехосевому блоку акселерометра-магнитометра во время проведения скважинных исследований, а θ, φ, ψ - углы, определяющие повороты между системой координат XYZ и декартовой системой координат NEV, где N - направление на северный магнитный полюс, V - вертикальное направление, Е - направление на восток. Недостатком данного способа является его чувствительность к внешним магнитным полям окружающей среды, искажающим магнитное поле Земли. Как следствие, - низкая точность при работе в скважинах, обсаженных стальными трубами, в частности на вертикальных и субвертикальных участках.
При использовании заявляемого способа решается задача ориентирования скважинного прибора по сторонам света.
При решении поставленной задачи достигается следующий результат: определяется положение направленных датчиков скважинных приборов относительно сторон света, в том числе при его использовании внутри колонны стальных труб и в вертикальных участках скважины.
Заявляемый способ базируется на том, что в Западной Сибири и в некоторых других регионах в случаях скважин, пробуренных методом кустового бурения, пересечение скважины с проектным по строительству скважины пластом происходит при углах, близких к 90°. В то же время на вышележащих интервалах, находящихся на расстоянии порядка от 50 до 200 м от места пересечения скважины с проектным пластом, угол отклонения оси скважины от вертикали составляет от 20° до 40°. Причем на данном участке проведены инклинометрические измерения, и для каждой точки траектории скважины известны азимут и зенитный угол.
Указанный результат достигается тем, что в способе определения положения скважинного прибора в скважине по данным трехосевого блока акселерометров, по известным формулам, например (Ковшов Г.Н., Алимбеков Р.И., Жибкр А.В., Инклинометры (основы теории и проектирования), Уфа, Гилем, 1998 г., 380 стр.), на участке скважины, обладающем достаточным наклоном для уверенной работы блока акселерометров, рассчитывают угол поворота точки визирования φ скважинного прибора относительно верхней стороны скважины и зенитный угол θ положения оси скважинного прибора, азмутальный угол α положения скважинного прибора определяют по данным инклинометрии ранее проведенных замеров. Далее на участке скважины, обладающей достаточным наклоном для уверенной работы блока акселерометров, производят запуск и разарретирование гироскопа, главная ось которого на момент разарретирования соосна с осью ОХ. Для текущего положения главной оси гироскопа через рассчитанный угол поворота точки визирования φ скважинного прибора относительно верхней стороны скважины и известного азмутального угла α положения скважинного прибора рассчитывается пространственное положение относительно сторон света. Затем скважинный прибор доставляется в вертикальный участок скважины, где благодаря способности гироскопа к сохранению пространственной ориентации положения главной оси по его показаниям определяют изменение положения корпуса скважинного прибора относительно положения главной оси инклинометра, и, соответственно, рассчитывают пространственное положение точки визирования скважинного прибора по сторонам света.
Суть данного способа заключается в следующем. Существующие технологии эксплуатации нефтяных скважин предполагают пересечение буровой скважины проектного пласта под субвертикальными углами. В то же время именно эти интервалы наиболее часто становятся объектами исследования. При этом часто необходимо результат исследования сориентировать по сторонам света. Это может быть, например, фотография, сделанная через объектив, расположенный в корпусе скважинного прибора, местоположение перфорационного отверстия, определенного электрическим или акустическим сканером опять-таки при помощи датчика, определенным образом связанного с корпусом скважинного прибора. В то же время при кустовом бурении углы отклонения скважины от вертикали достигают значительных величин на всем протяжении скважины непосредственно перед ее пересечением с проектным пластом.
Техническая сущность изобретения поясняется чертежами, где:
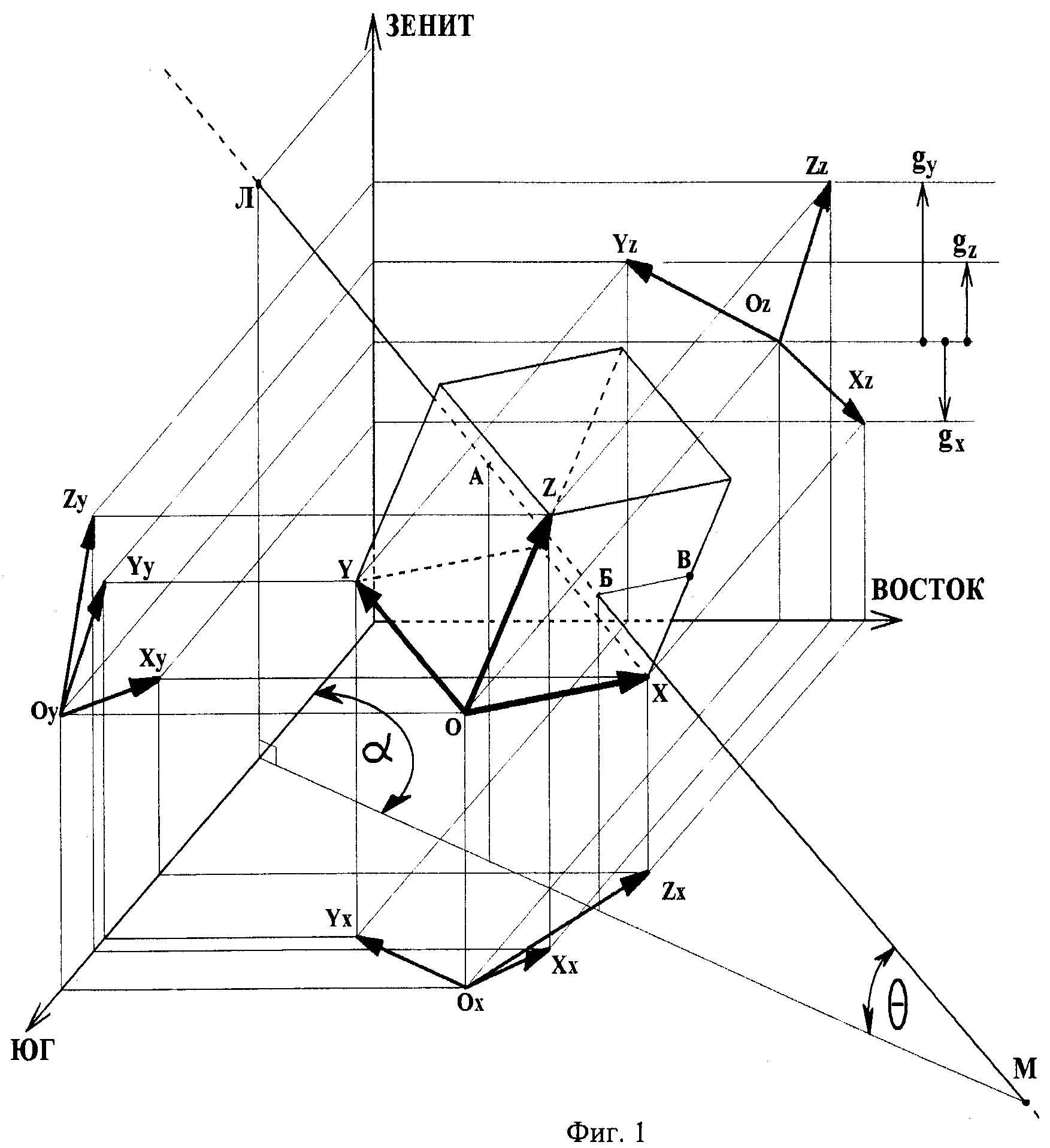
На Фиг.1 представлено положение в пространстве ортогональной системы координат;
На Фиг.2 представлена функциональная схема устройства, которым возможно осуществление предлагаемого способа.
Ортогональная система координат OXYZ жестко ориентирована относительно корпуса скважинного прибора, в декартовой системе координат ЮЗВ, где Ю - направление на южный географический полюс, З - вертикальное направление, В - направление на восток. Пространственное положение корпуса скважинного прибора и, соответственно, положение касательной к оси скважины в точке расположения центра скважинного прибора описываются углами: θ - зенитным и α - азимутальным. В скважинах, где были проведены инклинометрические исследования, эти данные есть для каждой точки траектории скважины.
Трехосный скважинный акселерометр, измеряющий проекции вектора ускорения силы тяжести на оси OX, OY и OZ, соответственно gx, gy, gz, благодаря тому, что ось ОХ жестко связана с точкой визирования скважинного прибора, позволяет по известным формулам, например (Ковшов Г.Н., Алимбеков Р.И., Жибкр А.В., Инклинометры (основы теории и проектирования), Уфа, Гилем, 1998 г., 380 стр.), вычислить положение оси ОХ в системе координат ЮЗВ, и на основании этого привязать данные, измеряемые скважинным прибором, к сторонам света. Однако, при вертикальном положении скважинного прибора, проекции вектора силы тяжести gx, gy равны нулю, что делает невозможным использование акселерометров для целей ориентирования положения скважинного прибора. Поэтому ориентацию положения скважинного прибора по сторонам света проводят на участке скважины, максимально приближенном к исследуемому участку и имеющем отклонение от вертикали, достаточное для уверенной работы блока трехосных акселерометров. Обычно при углах отклонения оси скважины от вертикали более 10° это условие выполняется с достаточной точностью. Здесь же проводят запуск и разарретирование гироскопа, главная ось которого в арретированном состоянии параллельна оси ОХ скважинного прибора. Таким образом, положение главной оси гироскопа привязывается к сторонам света, и, соответственно, на основании этого происходит ориентация положения точки визирования корпуса скважинного прибора. После этого прибор перемещается в интервал исследования. Ввиду того, что интервал исследования расположен недалеко от точки привязки, на перемещение не требуется много времени, что существенно уменьшает погрешность за счет наличия временного дрейфа гироскопа. Близость температур окружающей среды в точке привязки гироскопа и интервала исследования минимизирует температурную поправку на проводимые измерения. Это позволяет применять относительно простые гироскопы. После перемещения в интервал исследования направляющая вектора главной оси гироскопа сохраняет пространственную ориентацию, заданную положением скважинного прибора в точке привязки. В то же время пространственное положение корпуса скважинного прибора изменилось, вследствие чего изменились данные с гироскопа. Зная угол отклонения скважины от вертикали по данным блока трехосных акселерометров и изменения показаний гироскопа по известным формулам, рассчитывают пространственную ориентацию точки визирования корпуса скважинного прибора и соответственно, привязывают к странам света геофизические измерения, проведенные зондами и устройствами, жестко связанными с корпусом скважинного прибора.
Новым в способе определения ориентации скважинного прибора в буровой скважине, в котором продольная ось корпуса скважинного зонда сосна с осью скважины, по данным трехосевого блока акселерометров на участке скважины, обладающей достаточным наклоном для уверенной работы блока акселерометров, осуществляют расчет угла поворота точки визирования скважинного прибора относительно верхней стороны скважины и зенитный угол положения оси скважинного прибора, является то, что определяют азимутальный угол положения скважинного прибора по данным инклинометрии ранее проведенных замеров, на участке скважины, обладающей достаточным наклоном для уверенной работы блока акселерометров, производят запуск и разарретирование гироскопа, главная ось которого на момент разарретирования соосна с осью, перпендикулярной оси устройства, для текущего положения главной оси гироскопа через рассчитанный угол поворота точки визирования скважинного прибора относительно верхней стороны скважины и известного азимутального угла положения скважинного прибора рассчитывают пространственное положение относительно стран света, затем скважинный прибор доставляют в вертикальный участок скважины, где благодаря способности гироскопа к сохранению пространственной ориентации положения главной оси по его показаниям определяют изменение положения корпуса скважинного прибора относительно положения главной оси гироскопа и, соответственно, рассчитывают пространственное положение точки визирования скважинного прибора по сторонам света.
Сумма существенных признаков, приведенных в материалах этой заявки, в ходе изучения патентной и научно-технической литературы по данному вопросу не обнаружена. Из чего можно сделать вывод, что заявленное техническое решение соответствует критерию новизна и изобретательский уровень.
Устройство, реализующее предлагаемый способ, содержит корпус скважинного зонда 1, трехкомпонентный акселерометр 2, регистрирующий блок 3, вычислительное устройство 4, гироскоп 5, блок телеметрии 6. Устройство работает следующим образом. Сигналы с трехкомпонентного акселерометра 2, пропорциональные проекциям вектора ускорения силы тяжести, поступают на регистрирующий блок 3. Основной функцией регистрирующего блока 3 является преобразование аналогового сигнала с выходов акселерометров 2 в соответствующий цифровой код. Далее сигналы с соответствующих выходов блока регистрации 3 поступают на вычислительное устройство 4. Результатом вычислений являются рассчитанные проекции вектора ускорения силы тяжести на оси трехкомпонентного акселерометра 2, осредненные по заданным алгоритмам, например по алгоритму метода скользящего окна. Вычисленные значения посредством блока телеметрии 6 передаются на бортовой компьютер. В ходе дальнейших вычислений, проводимых бортовым компьютером, по известным формулам рассчитывается положение точки визирования скважинного зонда по данным трехкомпонентного акселерометра и данным инклинометрии, например предшествующих измерений, относительно стран света. Разарретирование гироскопа 5 и его запуск производятся по команде с бортового компьютера, поступившей на скважинный зонд 1 посредством блока телеметрии 6, вырабатывающего соответствующий сигнал для гироскопа 5. Сигналы с гироскопа 5, аналогичным образом сигналам с трехкомпонентного акселерометра 2, поступают на регистрирующий блок 3 и далее на вычислительное устройство 4. откуда посредством блока телеметрии 6 передаются на бортовой компьютер для проведения вычисления положения точки визирования скважинного зонда по данным гироскопа 5 относительно сторон света.
Понятно, что при использовании в качестве акселерометров современных устройств с цифровым выходом функции регистрирующего блока реализуются непосредственно внутри цифрового акселерометра. Это замечание справедливо также и для современных гироскопов.
Способ определения ориентации скважинного прибора в буровой скважине, в котором продольная ось корпуса скважинного зонда соосна с осью скважины, по данным трехосевого блока акселерометров на участке скважины, обладающей достаточным наклоном для уверенной работы блока акселерометров, осуществляют расчет угла поворота точки визирования скважинного прибора относительно верхней стороны скважины и зенитный угол положения оси скважинного прибора, отличающийся тем, что азимутальный угол положения скважинного прибора определяют по данным инклинометрии ранее проведенных замеров, далее на участке скважины, обладающем достаточным наклоном для уверенной работы блока акселерометров, производят запуск и разарретирование гироскопа, главная ось которого на момент разарретирования соосна с осью перпендикулярной оси устройства, для текущего положения главной оси гироскопа через рассчитанный угол поворота точки визирования скважинного прибора относительно верхней стороны скважины и известного азимутального угла положения скважинного прибора рассчитывают пространственное положение относительно сторон света, затем скважинный прибор доставляют в вертикальный участок скважины, где благодаря способности гироскопа к сохранению пространственной ориентации положения главной оси по его показаниям определяют изменение положения корпуса скважинного прибора относительно положения главной оси гироскопа и, соответственно, рассчитывают пространственное положение точки визирования скважинного прибора по сторонам света.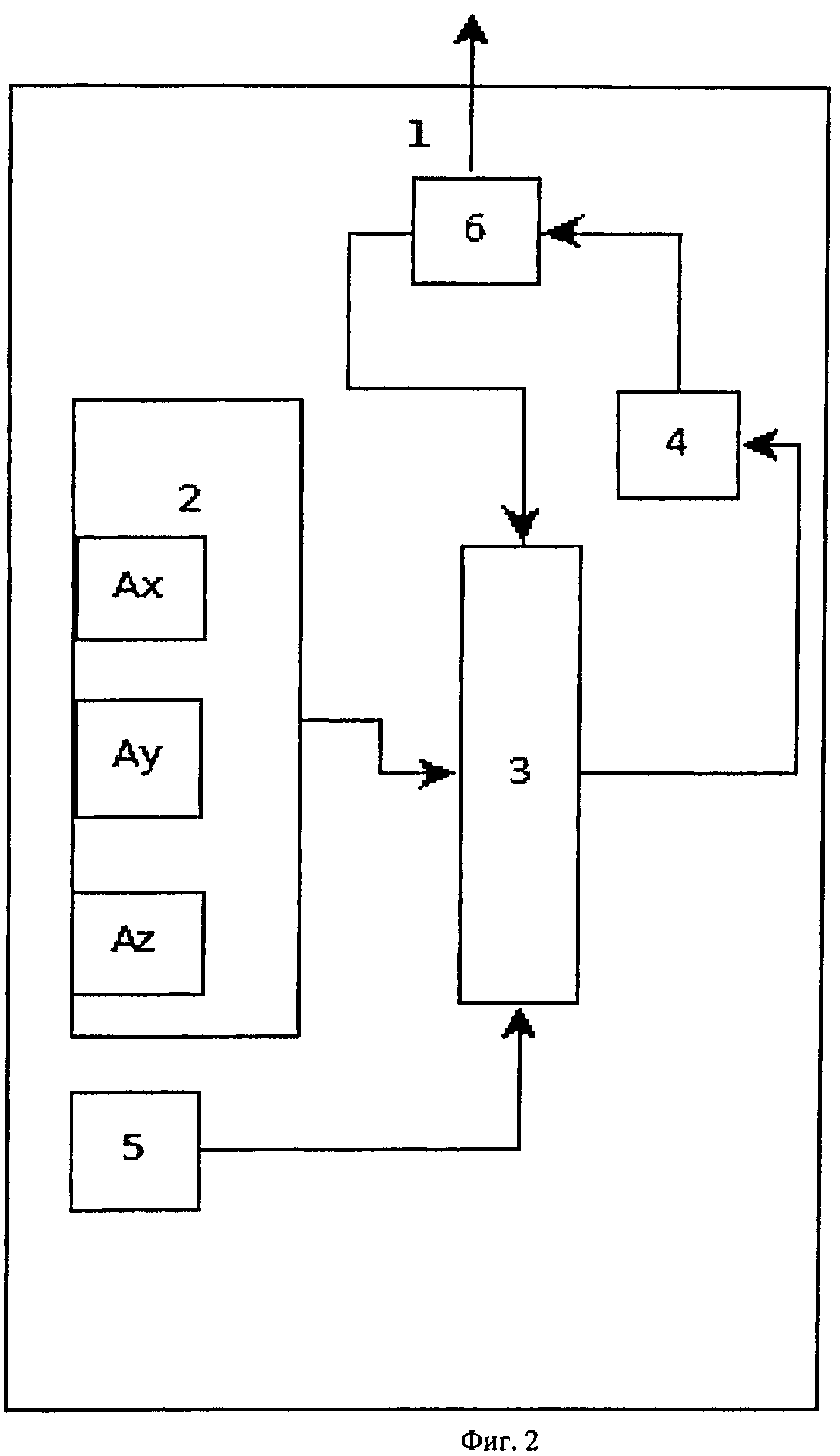
Способ импульсного нейтронного каротажа и устройство для его осуществления
Устройство для гамма-гамма каротажа, доставляемое в интервал исследования на буровом инструменте
Устройство определения плотности горных пород, пересекаемых буровой скважиной
Система передачи забойной информации в процессе бурения (варианты)
Прибор электрического каротажа
Способ импульсного нейтронного каротажа и устройство для его осуществления
Устройство для гамма-гамма каротажа, доставляемое в интервал исследования на буровом инструменте
Устройство определения плотности горных пород, пересекаемых буровой скважиной
Газонаполненная нейтронная трубка
Стабилизатор прибора lwd для радиоактивного каротажа
Способ стабилизации энергетической шкалы при определении объемной плотности и эффективного атомного номера горных пород методом ггк-лп

