УСТРОЙСТВО ИЗВЛЕЧЕНИЯ ИЗ СТОПЫ ПЛОСКИХ ПРЕДМЕТОВ С ОБНАРУЖЕНИЕМ СЛЕДА ИЗВЛЕЧЕННЫХ ПРЕДМЕТОВ
Вид РИД
Изобретение
Настоящее изобретение относится к области извлечения из стопы плоских предметов и, в частности, почтовых отправлений, таких как письма или почтовые отправления большого формата, такие как журналы, для их сортировки по сериям и для их серийного перемещения на конвейере.
В частности, объектом настоящего изобретения является устройство извлечения из стопы плоских предметов, содержащее:
- кассету, в которой предназначенные для извлечения плоские предметы размещены в стопе на ребре напротив разборочной плиты и по выравнивающему бортику, при этом разборочная плита выполнена с возможностью отделения первого предмета стопы от других предметов стопы и его перемещения в некотором направлении извлечения, по существу перпендикулярном к выравнивающему бортику,
- конвейер, выполненный с возможностью последовательного серийного перемещения на ребре извлеченных из стопы предметов, при этом конвейер содержит вход, расположенный на выходе выравнивающего бортика по отношению к направлению извлечения,
- средство удержания, расположенное по существу между выравнивающим бортиком и входом конвейера и управляемое таким образом, чтобы прикладывать на сторону предмета, перемещающегося в направлении извлечения между выравнивающим бортиком и входом конвейера, усилие удержания, например силу трения или силу всасывания, противодействующую перемещению этого предмета в этом направлении извлечения.
Уже известно такое устройство извлечения из стопы почтовых отправлений, в котором средством удержания управляют для обеспечения его систематической работы в ответ на сигнал, выдаваемый датчиком прохождения, установленным на входе конвейера. Недостатком такой конструкции является замедление перемещения всех отправлений, которое отрицательно сказывается на производительности устройства извлечения. Кроме того, систематическое приведение в действие средства удержания может привести к повреждению отправления небольшой толщины и к неправильному отделению отправлений большей толщины.
Настоящее изобретение призвано усовершенствовать устройство извлечения из стопы плоских предметов и, в частности, плоских почтовых отправлений с целью более эффективного управления средством удержания для разделения отправлений, извлекаемых совместно, то есть прилегающих друг к другу, до их прохождения на конвейер. Это позволяет подавать отправления одно за другим с оптимальным ритмом на вход конвейера.
В этой связи объектом изобретения является устройство извлечения из стопы плоских предметов, содержащее:
- кассету, в которой предназначенные для извлечения плоские предметы размещены в стопе на ребре напротив разборочной плиты и по выравнивающему бортику, при этом разборочная плита выполнена с возможностью отделения первого предмета стопы от других предметов стопы и его перемещения в некотором направлении извлечения, по существу перпендикулярном к выравнивающему бортику,
- конвейер, выполненный с возможностью последовательного серийного перемещения на ребре извлеченных из стопы предметов, при этом конвейер содержит вход, расположенный на выходе выравнивающего бортика по отношению к направлению извлечения,
- средство удержания, расположенное по существу между выравнивающим бортиком и входом конвейера и управляемое таким образом, чтобы прикладывать на сторону предмета, перемещающегося в направлении извлечения между выравнивающим бортиком и входом конвейера, усилие удержания, например силу трения или силу всасывания, противодействующее перемещению этого предмета в этом направлении извлечения,
отличающееся тем, что дополнительно содержит устройство обнаружения, выполненное с возможностью обнаружения следа каждого извлекаемого предмета в направлении между выравнивающим бортиком и входом конвейера и с возможностью анализа этого следа для обнаружения наличия нескольких предметов, перемещающихся совместно, и, на основе этого обнаружения, - с возможностью управления упомянутым средством удержания для разделения перемещающихся совместно предметов.
Отслеживание каждого извлекаемого предмета (следа нижнего ребра каждого предмета) можно производить при помощи оптических средств, таких как линейная камера, однако можно предусмотреть и другие типы обнаруживающих устройств, например в виде гребня. След каждого извлекаемого предмета может позволить выявить наличие нескольких совместно перемещающихся предметов, а также относительное положение отправлений, и, следовательно, в случае, когда, например, два предмета перемещаются вместе, этот след позволяет определить, какой из них опережает другой в направлении извлечения. Это определение позволяет лучше контролировать управление средством удержания по сравнению с известным из уровня техники систематическим управлением. Испытания позволили установить, что только 60% ситуаций, в которых предметы перемещаются совместно, можно корректировать при помощи известного устройства извлечения, в котором средство удержания активируют систематически. При таком известном устройстве в случае совместно извлекаемых предметов, если опережающее отправление является отправлением, которое находится со стороны средства удержания (при этом отстающим является отправление, перемещаемое разборочной плитой), действие средства удержания не имеет никакого эффекта, поскольку опережающее отправление уже увлекается конвейером и, следовательно, не может быть отделено от отстающего отправления. При устройстве извлечения в соответствии с настоящим изобретением осуществляют заблаговременное обнаружение ситуаций извлекаемых совместно отправлений, что позволяет привести в действие средство удержания до того, как отправления достигнут входа конвейера. Это раннее обнаружение позволяет обрабатывать те 40% совместно извлекаемых отправлений, управление которыми не обеспечивало известное устройство извлечения.
Устройство извлечения из стопы в соответствии с настоящим изобретением предпочтительно может содержать следующие отличительные признаки:
- предусмотрены линейная камера, расположенная поперечно к упомянутому направлению извлечения снизу пути извлекаемых предметов между выравнивающим бортиком и входом конвейера, для получения изображения следа извлекаемых предметов и блок обработки данных, выполненный с возможностью определения в случае наличия, по меньшей мере, двух извлекаемых совместно предметов, какой из двух предметов находится впереди относительно другого в упомянутом направлении извлечения, и с возможностью управления средством удержания на основании этого определения;
- линейная камера расположена на входе средства удержания относительно направления извлечения;
- предусмотрены первое и второе средства удержания, расположенные противоположно друг другу относительно направления извлечения;
- предусмотрено первое и, в случае необходимости, второе средства удержания, расположенные по линии относительно направления извлечения;
- каждое средство удержания является устройством всасывания;
- блок обработки данных выполнен с возможностью измерения толщины каждого извлекаемого отправления исходя из изображения, при этом упомянутое измерение предназначено для регулирования усилия удержания, создаваемого средством удержания;
- блок обработки данных выполнен с возможностью обнаружения при помощи изображения наличия скрепки на отправлении, и это обнаружение позволяет регулировать усилие удержания, создаваемое средством удержания;
- предусмотрено несколько линейных камер, отстоящих друг от друга в направлении извлечения.
Другим объектом изобретения является машина для обработки почтовых отправлений, содержащая вышеописанное устройство извлечения.
Далее следует более подробное описание изобретения со ссылками на прилагаемые чертежи, которые иллюстрируют неограничительные примеры выполнения.
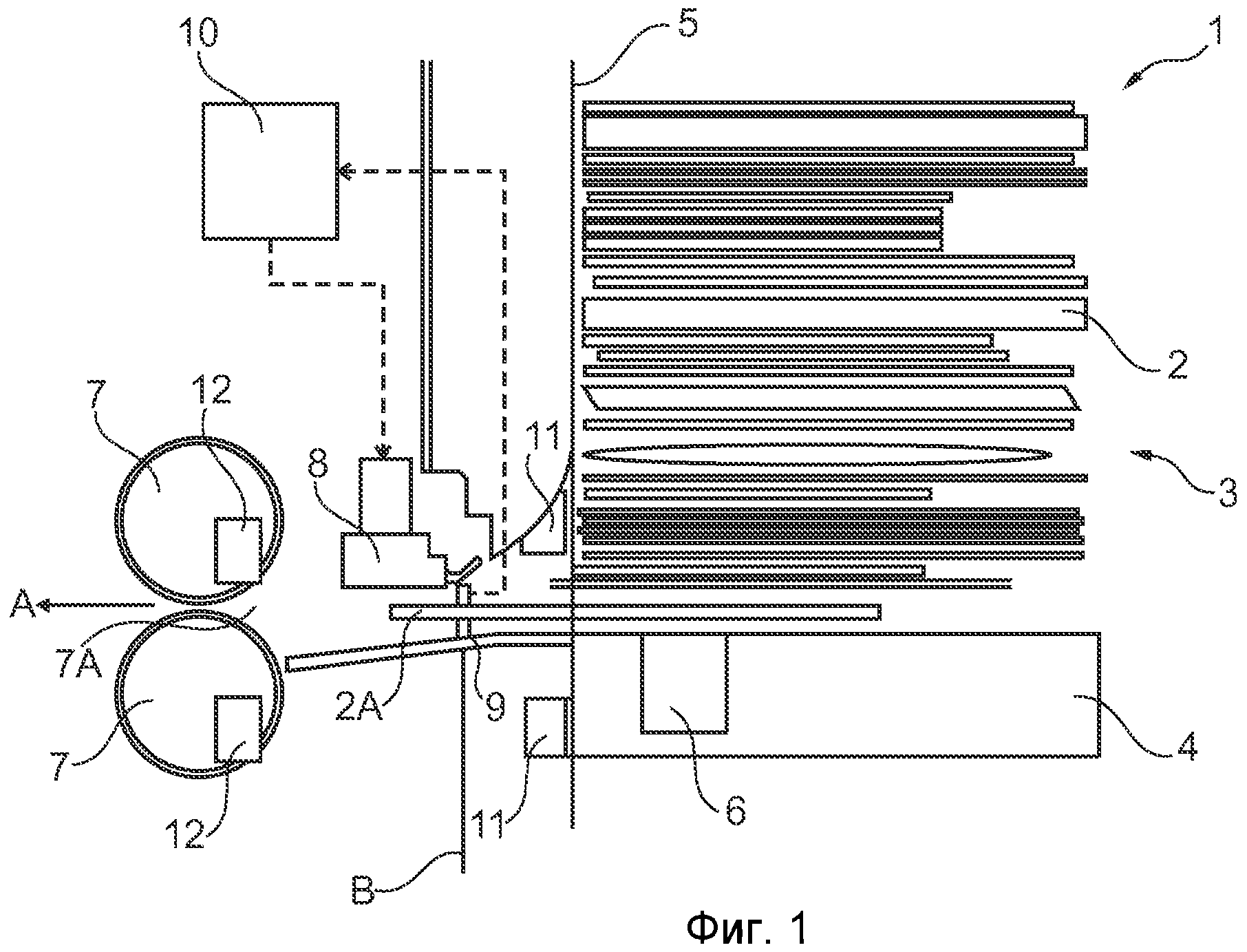
Фиг.1 - схематичный вид сверху устройства извлечения в соответствии с настоящим изобретением.
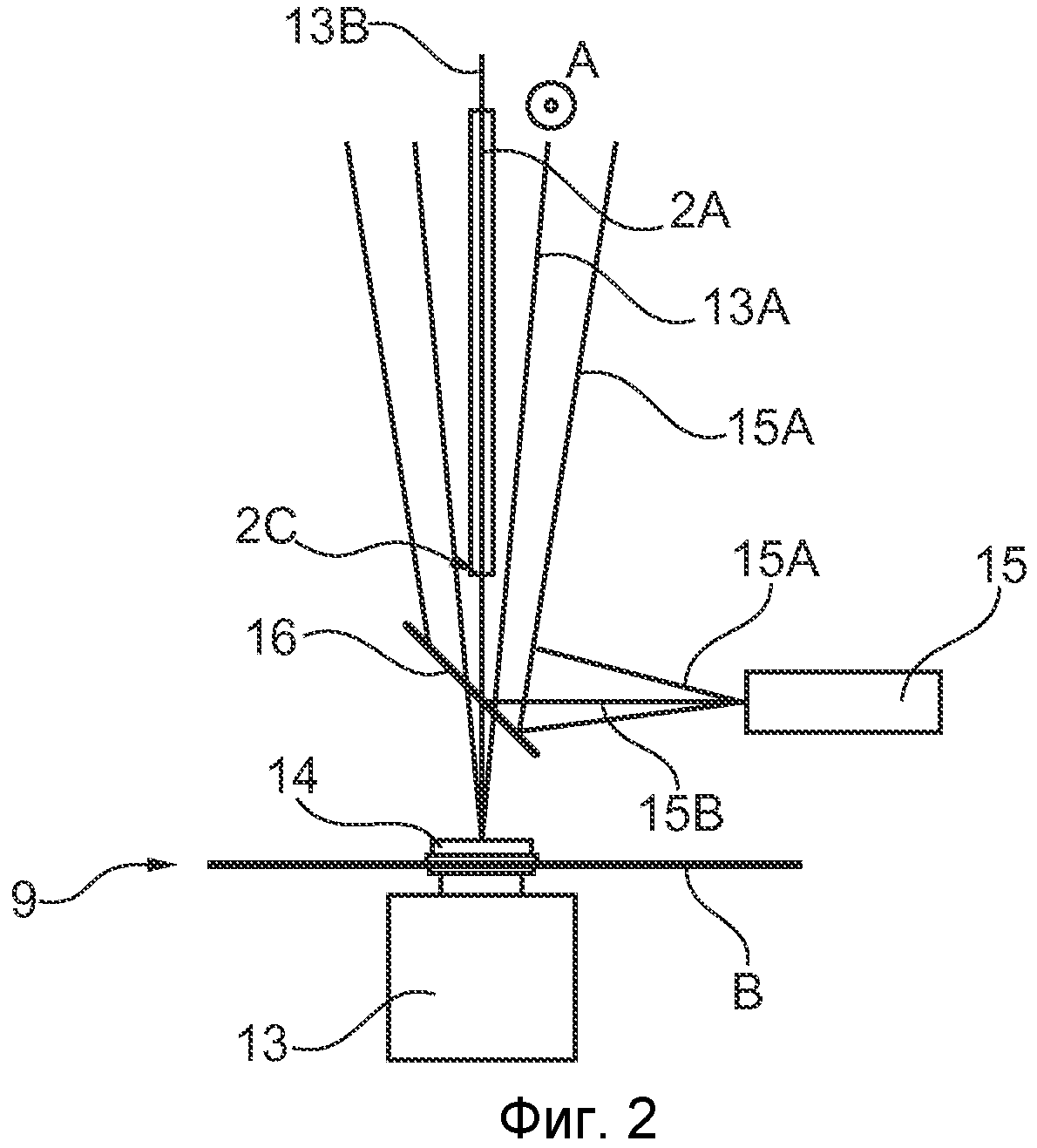
Фиг.2 - оптическое устройство для съемки следа нижнего ребра отправлений в соответствии с настоящим изобретением.
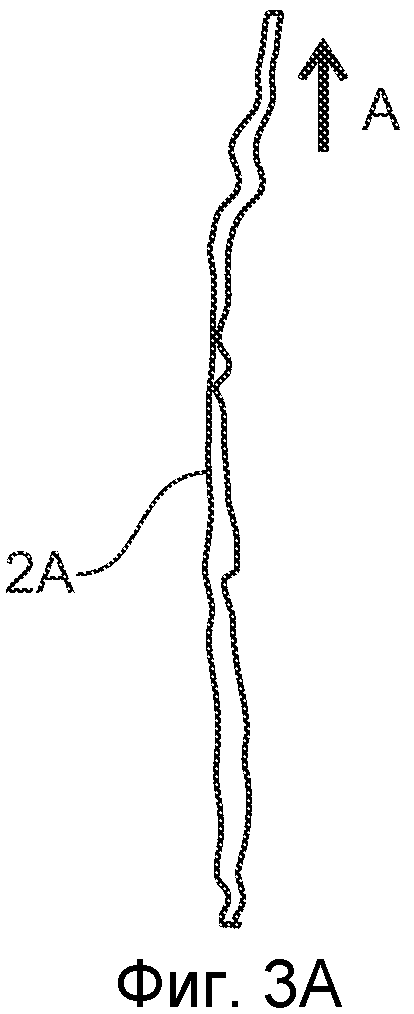
Фиг.3А - изображение отдельного отправления с множеством уровней серого, полученное при помощи устройства обнаружения в соответствии с настоящим изобретением.
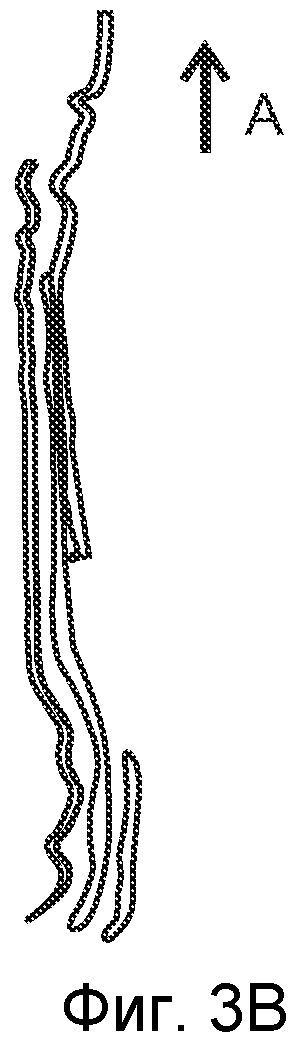
Фиг.3В - изображение нескольких совместно извлекаемых отправлений с множеством уровней серого, полученное при помощи устройства обнаружения в соответствии с настоящим изобретением.
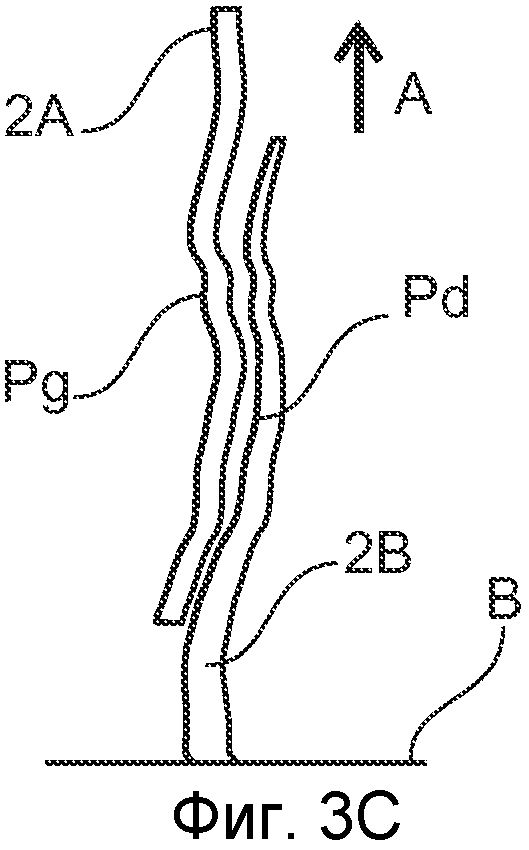
Фиг.3С - изображение двух отправлений с множеством уровней серого, из которых левое отправление находится впереди относительно правого отправления, полученное при помощи устройства обнаружения в соответствии с настоящим изобретением.
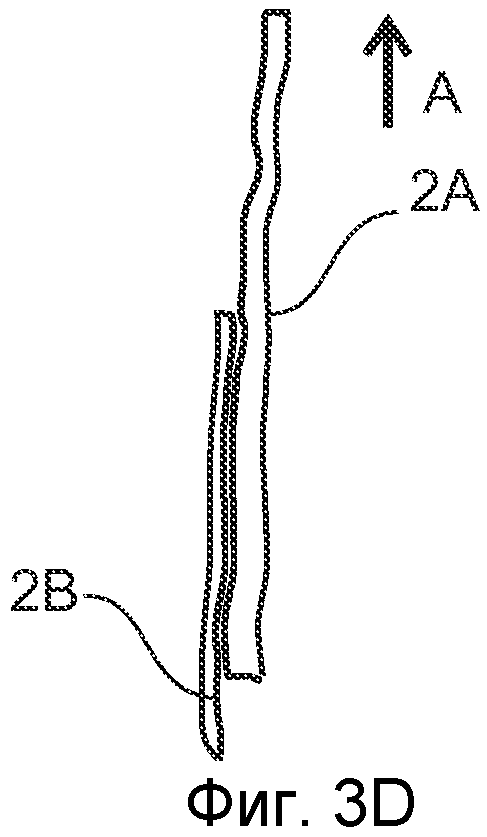
Фиг.3D - изображение двух отправлений с множеством уровней серого, из которых отправление справа находится впереди относительно левого отправления, полученное при помощи детекторного устройства обнаружения в соответствии с настоящим изобретением.
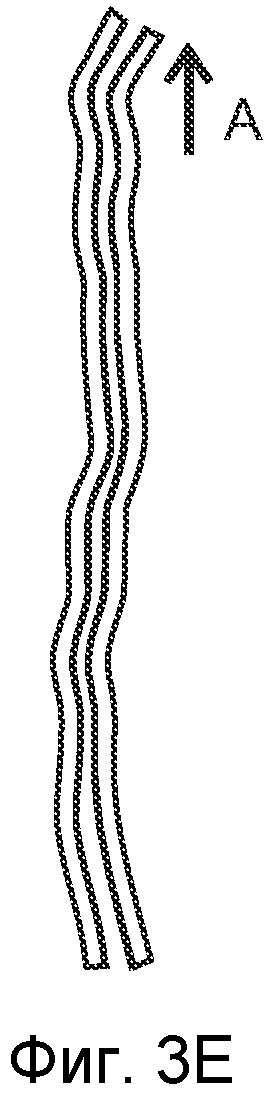
Фиг.3Е - изображение двух отправлений с множеством уровней серого, два передних фронтальных ребра которых имеют одну абсциссу, полученное при помощи устройства в соответствии с настоящим изобретением.
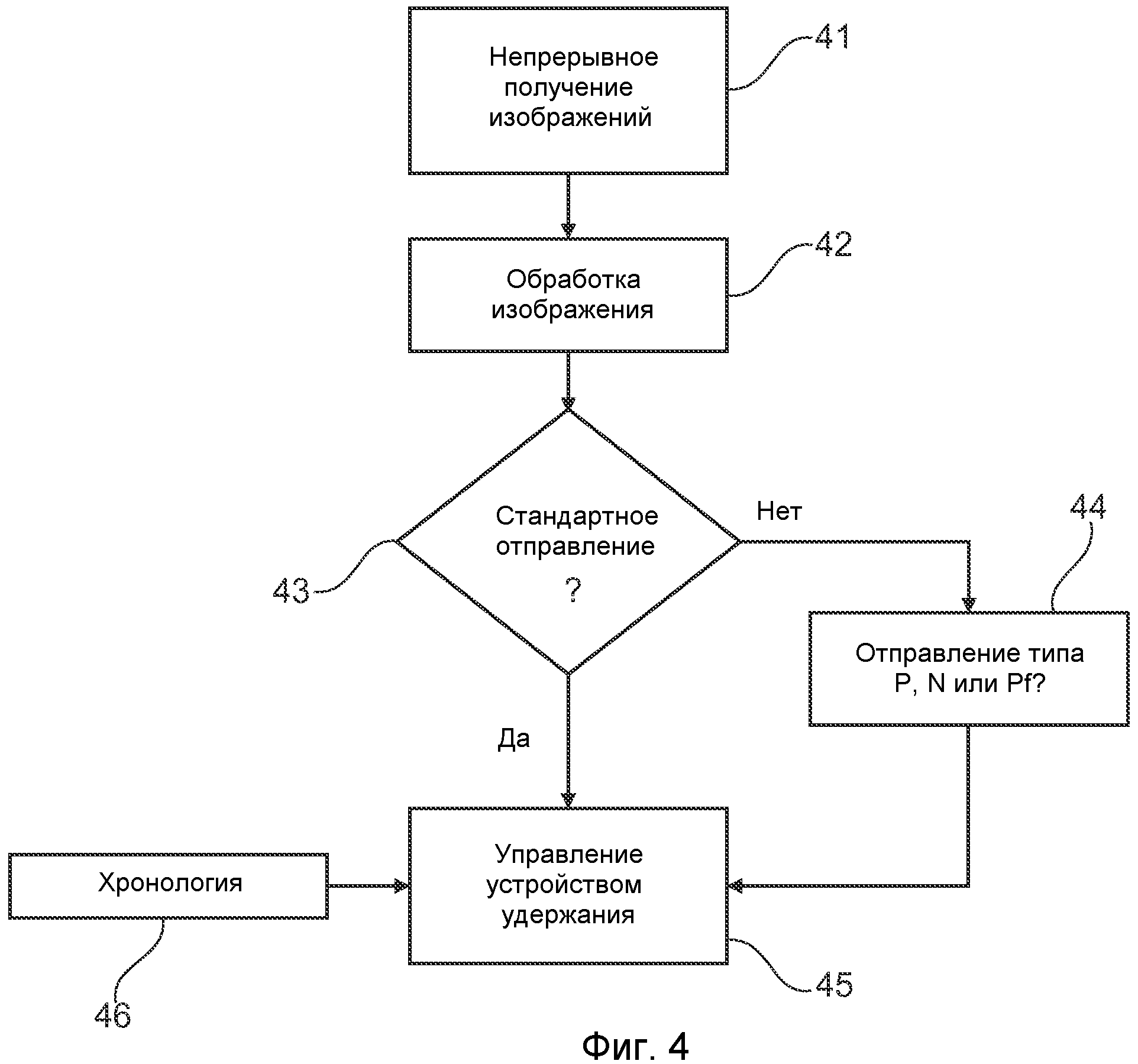
Фиг.4 - функциональная схема, иллюстрирующая процесс обнаружения в соответствии с настоящим изобретением.
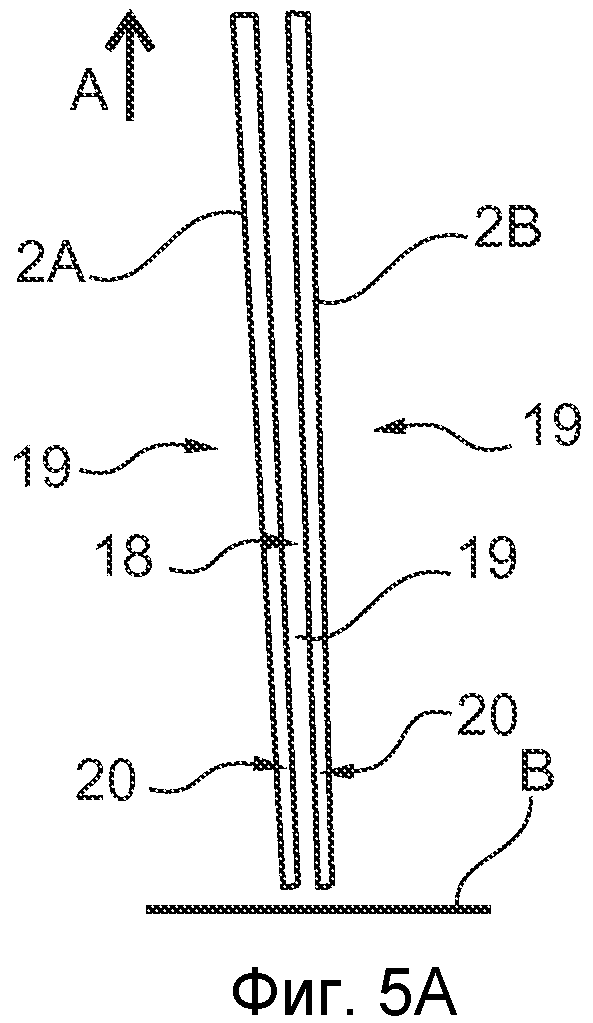
Фиг.5А - другое изображение двух отправлений с множеством уровней серого, полученное при помощи устройства обнаружения в соответствии с настоящим изобретением.
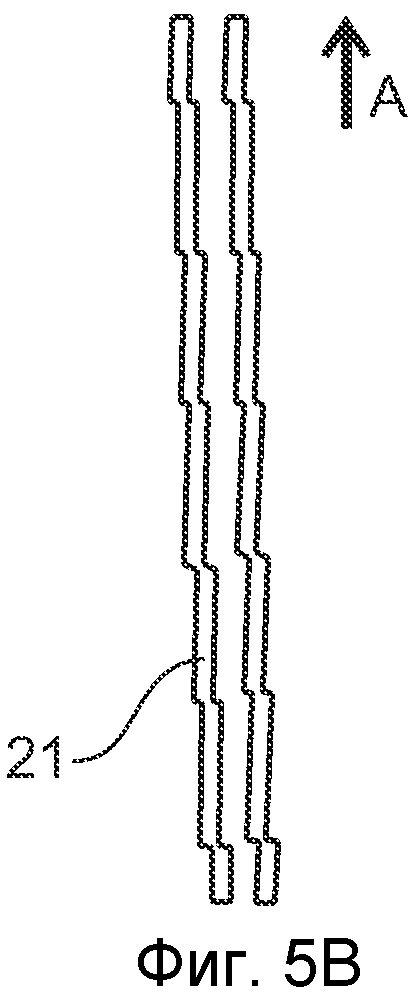
Фиг.5В - проекция изображения с множеством уровней серого, показанного на Фиг.5А.
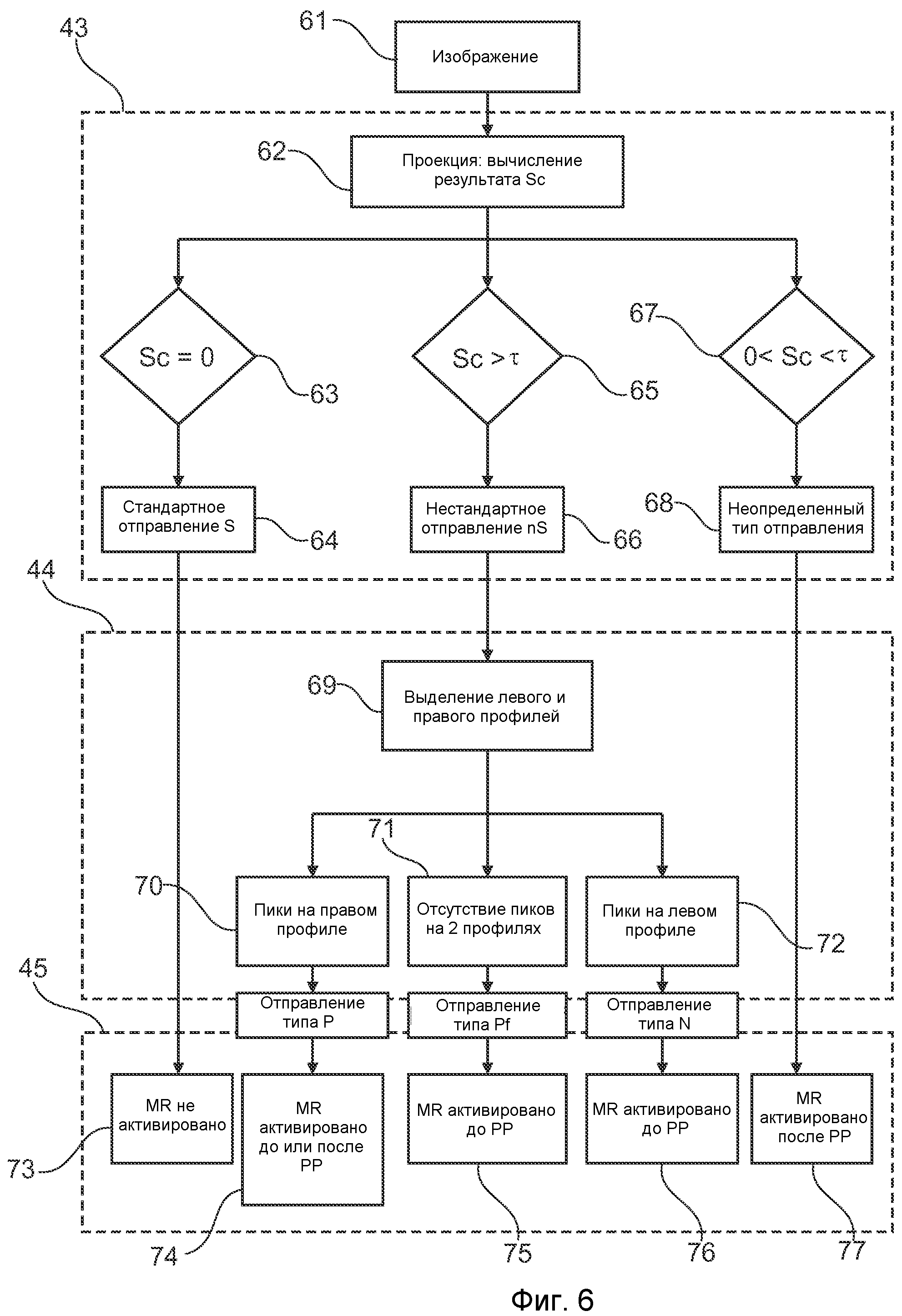
Фиг.6 - функциональная схема, иллюстрирующая управление средством удержания в соответствии с настоящим изобретением.
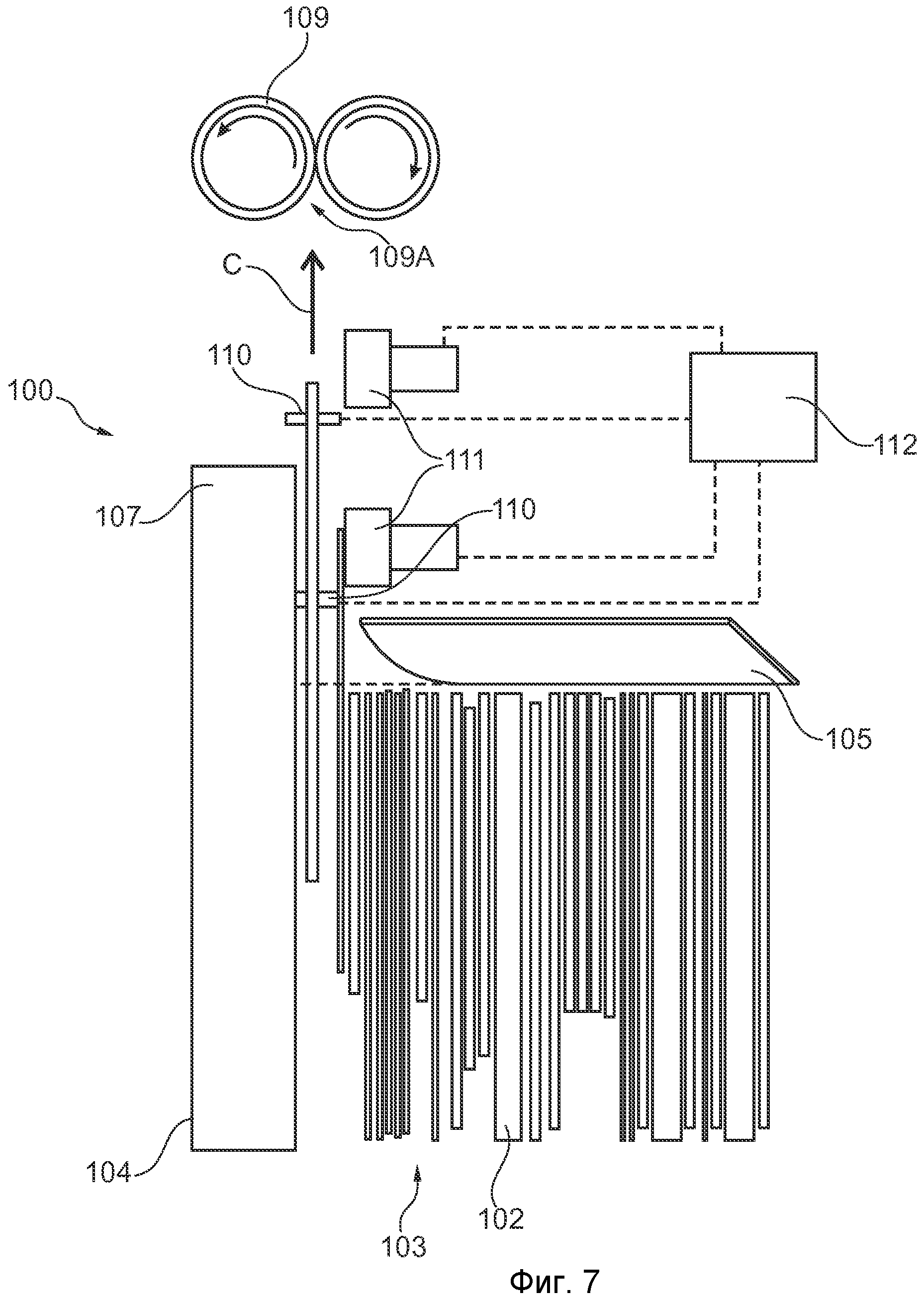
Фиг.7 - схематичный вид сверху другого варианта выполнения устройства извлечения из стопы в соответствии с настоящим изобретением.
На Фиг.1 в верхней проекции показано устройство 1 извлечения плоских почтовых отправлений 2, содержащее кассету 3, в которой предназначенные для извлечения почтовые отправления 2 расположены на ребре в виде стопы напротив разборочной плиты 4 и по выравнивающему бортику 5, который по существу перпендикулярен разборочной плите 4.
На разборочной плите 4 расположено приводное средство 6, например перфорированный ремень, взаимодействующий с разборочной электрической задвижкой, выполненный с возможностью перемещения первого отправления 2А из разбираемой стопы 2, находящейся напротив разборочной плиты 4, в некотором направлении извлечения, указанном стрелкой А, перпендикулярном выравнивающему бортику 5.
Как показано на Фиг.1, устройство 1 извлечения содержит также конвейер 7, в данном случае захватный конвейер, содержащий два механизированных шкива, расположенных друг против друга и образующих вход 7А конвейера. Обычно вход 7А называют «точкой захвата» устройства извлечения. Он расположен на выходе разборочной плиты 4 в направлении извлечения А. Между входом 7А конвейера и выравнивающим бортиком 5 в направлении извлечения А предусмотрены средство 8 удержания, например всасывающая насадка, и устройство 9 обнаружения.
Средство 8 удержания расположено со стороны пути отправлений в направлении А и предназначено для приложения на сторону отправления, перемещающегося между выравнивающим бортиком и входом конвейера, усилия удержания, противодействующего перемещению этого отправления в направлении извлечения А. Как будет показано ниже, устройство извлечения в соответствии с настоящим изобретением может содержать, например, два средства удержания, противоположных друг другу относительно направления извлечения А, то есть расположенных по обе стороны от пути отправлений между выравнивающим бортиком и входом конвейера, или же два или несколько средств удержания, расположенных по линии с одной стороны пути отправлений.
Устройство обнаружения 9 содержит оптическое устройство, в данном случае линейную камеру 13 типа “CCD”, расположенную снизу пути отправлений между выравнивающим бортиком 5 и входом 7А. Предпочтительно камеру 13 располагают вблизи выравнивающего бортика 5 на входе средства 8 удержания в направлении извлечения А, чтобы заранее производить обнаружение совместно перемещающихся отправлений. Линейная камера 13 расположена поперечно к направлению извлечения А для получения изображения следа каждого извлекаемого отправления, перемещающегося между выравнивающим бортиком 5 (или разборочной плитой 4) и входом 7А конвейера. Изображение может быть, в частности, цифровым изображением с множеством уровней серого (MNG). Как было указано выше, вместо камеры 13 можно использовать, например, датчик типа тактильного гребня, чувствительного к весу отправления.
Между разборочной плитой 4 и конвейером 7 можно предусмотреть датчики 11, 12 прохождения, например фотоэлементы, каждый из которых содержит излучатель и приемник. В частности, первый датчик 11 располагают на уровне выравнивающего бортика 5 для обнаружения переднего фронтального ребра каждого отправления, как только оно покидает разборочную плиту. Второй датчик 12 расположен на входе 7А конвейера для обнаружения переднего фронтального ребра каждого отправления, появляющегося на входе 7А конвейера.
На Фиг.2 детально показано оптическое устройство 9, которое содержит линейную камеру 13 типа CCD, оборудованную соответствующей оптикой 14, и осветительное устройство 15, излучающее световой пучок 15А, в данном случае выполненное в виде лазерного диода с линейным генератором. Камера 13 имеет ширину поля обзора 13А, ориентированную таким образом, чтобы его ось 13В или визирная линия была перпендикулярна к направлению извлечения А для съемки нижнего ребра каждого отправления. Таким образом, линия съемки камеры 13 направлена по существу перпендикулярно к ребру отправления 2А в горизонтальном направлении, перпендикулярном к направлению извлечения А и показанном стрелкой В на Фиг.2. Таким образом, камера 13 непрерывно создает линейные изображения, при том что отправление, подобно отправлению 2А, перемещается перед камерой в направлении извлечения А. Последовательно получаемые линейные изображения сохраняются в памяти для формирования двухмерного изображения нижнего ребра 2С отправления 2А.
Чтобы увеличить компактность устройства 9 обнаружения с целью облегчения его механического интегрирования в устройство 1 извлечения, ось 15В осветительного устройства 15 ориентируют по существу перпендикулярно к оси 13В камеры 13 и предусматривают делитель 16 пучка для ориентирования освещения таким образом, чтобы совместить его с осью 13В камеры 13. Таким образом, делитель 16 пучка (например, пластинку) располагают одновременно примерно под углом 45° по отношению к оси 13В камеры 13 и примерно под углом 45° по отношению к оси 15В осветительного устройства 15, чтобы отклонять световой пучок 15А. Таким образом, камера 13 снимает изображения отправления 2А через делитель 16 пучка. Такое осветительное устройство 15 с делителем 16 пучка позволяет увеличить глубину поля устройства 9 обнаружения и одновременно улучшить освещение отправления 2А.
Предпочтительно камера 13 является линейным 512-пиксельным датчиком, и разрешение получаемых изображений может составлять примерно 16 пикселей на миллиметр (мм) в направлении В, что соответствует предельной возможности дискриминации отправления 2А или промежутка между двумя отправлениями менее 0,1 мм толщины. Частота съемки при скорости приблизительно 2,4 м/с дает разрешение примерно 4 пикселя на мм или 4 строки на мм. В варианте камера 13 может быть матричной камерой, которая напрямую снимает двухмерное изображение ребра отправления 2А.
Камеру 13 можно позиционировать на уровне щели, предусмотренной в основании устройства извлечения между разборочной плитой и конвейером. Она может находиться на достаточном удалении от выравнивающего бортика 5, чтобы избегать осуществления съемки отправления в положении ожидания извлечения в кассете 3, но достаточно близко, чтобы обеспечивать управление в реальном времени средством 8 удержания при помощи блока 10 обработки данных. Как будет показано ниже, блок 10 выполнен с возможностью анализа изображения следа отправления, чтобы обнаруживать наличие нескольких извлекаемых совместно отправлений и, следовательно, чтобы подсчитывать число отправлений и определять их относительное положение, и, в случае обнаружения нескольких отправлений, подавать соответствующую команду на средство 8 удержания.
На Фиг.3А-3Е показаны примеры изображений с множеством уровней серого, полученных при помощи камеры 13. Изображение на Фиг.3А показывает только один след. Изображение на Фиг.3В показывает четыре следа и, следовательно, наличие нескольких извлекаемых совместно отправлений. Изображения на Фиг.3С и 3D показывают два следа, то есть тоже совместно извлекаемые отправления. В целом можно различать четыре случая. Отправление называют отправлением стандартного типа или “S”, если оно извлекается отдельно (Фиг.3А). Если извлекают одновременно, по меньшей мере, два оправления, отправление называют нестандартным или “nS” позитивного типа или “P”, если переднее фронтальное ребро левого отправления в направлении перемещения А находится впереди относительно переднего фронтального ребра правого отправления, как показано на Фиг.3С; и отправление называют “nS” негативного типа или “N”, если переднее фронтальное ребро правого отправления в направлении перемещения А находится впереди относительно переднего фронтального ребра левого отправления, как показано на Фиг.3D. Наконец, если оба передних фронтальных ребра двух одновременно извлекаемых отправлений идеально совпадают (то есть имеют одну абсциссу в направлении перемещения А), отправление называют идеальным “nS” или “Pf”, как показано на Фиг.3Е.
В случае конфигурации устройства 1 извлечения, показанной на Фиг.1, если два первых отправления стопы 2 извлекают вместе, первое отправление стопы будет находиться с левой стороны в направлении перемещения А, а второе оправление - с правой стороны. Понятно, что отправление позитивного типа соответствует конфигурации, в которой переднее фронтальное ребро первого отправления стопы находится впереди переднего фронтального ребра второго отправления. Эта конфигурация наблюдается чаще всего, так как она представляет собой примерно 75% нестандартных отправлений. Средство 8 удержания установлено, таким образом, с правой стороны по отношению к направлению перемещения А для удержания второго отправления, в большинстве случаев с задержкой. Разумеется, понятно, что в конфигурации устройства извлечения, симметричной относительно конфигурации, показанной на Фиг.1, отправление позитивного типа будет соответствовать правому отправлению, опережающему левое отправление.
Таким образом, блок 10 обработки выполнен с возможностью определения, в случае совместного извлечения отправлений, типа отправления S, P, N или Pf и с возможностью соответствующего управления средством 8 удержания.
На Фиг.4 показано это управление средством 8 удержания. На этапе 41 в непрерывном режиме получают последовательные линейные изображения MNG нижнего ребра каждого отправления, как только его обнаруживает, например, датчик 11, и по мере его перемещения в направлении А. Съемка и анализ изображений ребра отправлений в варианте могут быть ограничены продолжительностью цикла извлечения, то есть их запускают одновременно с активацией приводного средства 6 и останавливают в определенное время после деактивации этого приводного средства. С учетом высокой скорости извлекаемых отправлений (порядка 2,4 м/с) время, отведенное для обработки изображений блоком 10 для управления информацией, задаваемой следом извлекаемых отправлений, может быть меньше 10 миллисекунд (мс) в зависимости от конфигурации устройства 1 извлечения. Для соблюдения этого условия реального времени блок 10 анализирует частичные двухмерные изображения, содержащие ограниченной число строк считывания, например в данном случае 32 строки, которые соответствуют приблизительно длине в 8 мм извлекаемого отправления. Таким образом, каждое частичное изображение содержит 32 строки и 512 столбцов пикселей MNG.
Анализ можно производить также на частичных изображениях из 32 столбцов со скользящим окном, например, из 4 столбцов в 4 столбца, чтобы получить перекрывание последовательных изображений и возобновлять анализ через каждые 4 столбца считывания изображения, то есть чрез каждый миллиметр продвижения отправлений.
Частичное двухмерное изображение записывают в память на этапе 42 и анализируют на этапе 43 для определения совместного извлечения нескольких отправлений и числа присутствующих отправлений. Во время этого анализа текущее или текущие отправления продолжают свое перемещение в направлении А, и теряются предположительно 2 строки считывания, что соответствует 0,5 мм следа отправления до полного обновления частичного изображения. В случае обнаружения нескольких отправлений обработка продолжается определением типа отправления S или нестандартного P, N или Pf на этапе 44 с целью управления средством удержания на этапе 45 с учетом, в случае необходимости, хронологии на этапе 46, что будет описано ниже.
Этапы 43 и 44 более детально показаны на Фиг.6.
На этапе 61 в памяти воспроизводят изображение. Анализ изображения состоит в определении числа отправлений, извлекаемых совместно и видимых на этом изображении. Для этого используют тот факт, что между следами нескольких отправлений на изображении существует более или менее большой промежуток 18, что показано на Фиг.5А.
На изображении это выражается чередованием темных зон 20 (следы отправлений) и светлых зон 19 (вокруг отправлений и промежуток 18). Число переходов между темной зоной и светлой зоной в направлении В является надежной характеристикой, позволяющей определить тип отправлений. Понятно, что в зависимости от принятых условий динамики изображения промежуток 18 может, наоборот, соответствовать темной зоне, а отправления - светлым зонам.
Чтобы подсчитать на этапе 62 число переходов в изображении, сначала изображение разбивают в направлении В на полосы 21 фиксированного размера, как показано на Фиг.5В. Затем подсчитывают проекцию уровней серого на каждой полосе 21, то есть вычисляют среднюю величину уровней серого пикселей на столбец полосы изображения MNG таким образом, чтобы после проекции все строки полосы имели одинаковые значения. Таким образом, сглаживают изображение MNG, что делает метод обнаружения числа присутствующих отправлений менее чувствительным к помехам. Понятно, что ширину полос выбирают соответствующим образом: небольшая ширина полосы приведет к слишком зашумленному сигналу проекции, подверженному локальным колебаниям. Слишком широкая полоса, наоборот, сглаживает сигнал и подавляет характеристические пики бимодальных распределений (темные/светлые зоны). Кроме того, слишком широкая полоса может привести к ошибке метода в случае изогнутого стандартного отправления (см. Фиг.3А, верхняя часть отправления).
После этого для каждой полосы 21 находят число экстремумов с точки зрения уровней серого, которые соответствуют переходам темное/светлое. Как известно, сначала поиск экстремумов состоит в нахождении локальных максимумов и минимумов, затем, если локальные максимумы и минимумы различаются ненамного или являются слишком близкими, их отбрасывают, пока не найдут минимум, который находится между двумя максимумами, для обнаружения двух отправлений. После этого осуществляют вычисление, характеризующее среднее число Sc переходов для всего участка изображения, по следующему уравнению:
|
Понятно, что Sc должно находиться между 0 для одного отдельно извлекаемого отправления и 1 для двух отправлений. Однако на практике Sc может быть больше 1 в случае, когда одновременно извлекают три отправления или больше. Результат Sc необходимо приблизить к понятию степени принадлежности размытых подсистем. Получение на выходе степени принадлежности к размытости является главным преимуществом этого подхода, так как он позволяет непрерывно переходить от одного отправления S к нескольким совместно извлекаемым отправлениям, избегая, таким образом, пороговых эффектов.
На основании среднего числа Sc переходов сначала для текущего извлекаемого отправления определяют, что оно принадлежит к одной из двух категорий типа S или nS путем простого определения порогов на результате вычисления Sc. Так, отправления, для которых Sc является нулевым (этап 63), на этапе 64 причисляют к типу S, а отправления, для которых Sc превышает определенный порог τ (этап 65), относят к типу nS на этапе 66 (то есть все отправления, о которых с уверенностью можно сказать, что они не относятся к типу S). Отправления, для которых Sc находится в пределах между 0 и τ (этап 67), могут принадлежать к одному или другому типу (S или nS). Этот диапазон значений Sc является областью погрешности метода, которая соответствует неоднозначной классификации отправлений на этапе 68. Следовательно, порог τ выбирают таким образом, чтобы получить компромисс между ложными направлениями сортировки (возникающими из-за отправлений типа nS, детектированных как отправления типа S) и отправлениями типа S, ошибочно определенными как отправления типа nS.
Если на этапе 66 отправления были отнесены к типу nS с достаточной степенью надежности, способ продолжается на этапе 44 алгоритмом распределения по группам, предназначенным для определения позитивного, негативного или идеального типа совместно извлекаемых отправлений.
Алгоритм распределения по группам состоит на этапе 69 в выделении на изображении MNG левого и правого профилей для анализа этих профилей, с целью обнаружения пиков. Левый профиль Pg(i) текущего отправления определяют как совокупность пикселей с уровнем серого, превышающим определенный порог σ, когда каждую строку изображения MNG считывают слева направо в направлении В, перпендикулярном к направлению перемещения А, как показано на Фиг.3С:
Pg(i) = Min {j/изображение[i,j]>σ}, где i и j являются координатами каждого пикселя, при этом i обозначает индекс положения строки, а j - индекс положения столбца, и изображение [i,j] является значением пикселя с координатами (i,j) на изображении MNG.
Точно так же определяют правый профиль Pd(i) как совокупность последних пикселей, имеющих уровень серого, превышающий порог σ в направлении В, перпендикулярном к направлению перемещения А, как показано на Фиг.3С:
Pd(i) = Max {j/изображение[i,j]>σ}.
Понятно, что порог σ может быть разным для определения левого или правого профиля, например, чтобы учитывать явления тени.
Алгоритм распределения по группам продолжается определением левых и правых пиков в профилях в качестве локальных экстремумов соответствующих функций |Pg(i+1)-Pg(i)| для левого профиля и |Pd(i+1)-Pd(i)| для правого профиля.
Наконец, в зависимости от присутствия или отсутствия пиков в профилях алгоритм распределяет отправления по группам следующим образом:
- в случае присутствия пика на левом профиле отправление относят к типу N на этапе 72 (Фиг.3D);
- в случае отсутствия пиков отправление относят к типу Pf на этапе 71 (Фиг.3Е);
- в случае присутствия пика на правом профиле отправление относят к типу Р на этапе 70 (Фиг.3С).
Затем, в зависимости от полученного результата и опираясь на хронологию предыдущих решений 46, блок 10 активирует или не активирует на этапе 45 средство 8 удержания:
- на этапе 73 в случае стандартного отправления типа S (фиг.3А) средство 8 удержания (показанное обозначением MR на Фиг.6) не активируют;
- на этапе 74 в случае отправления типа Р (Фиг.3С) средство 8 удержания можно активировать, в зависимости от толщины отправления, либо до того, либо после того как отправление 2А обнаружено датчиком 12 на уровне точки захвата 7А (показанной обозначением «РР» на Фиг.6), то есть находящееся впереди отправление (левое) захватывается конвейером 7 отправлений, а правое отправление удерживается средством 8 удержания, что позволяет отделить левое отправление и избежать загромождения конвейера 7 отправлений;
- на этапе 76 в случае отправления типа N (Фиг.3D) средство 8 удержания активируют до того, как отправление 2А будет обнаружено датчиком 12 на уровне точки захвата 7А, то есть находящееся впереди отправление (правое) удерживается средством 8 удержания, а левое отправление извлекают и его захватывает конвейер 7 отправлений, что позволяет разделить два отправления и избежать загромождения конвейера 7 отправлений;
- на этапе 75 в случае отправления типа Pf (Фиг.3Е) активация является такой же, как и для отправления типа N, то есть средство 8 удержания активируют до того, как отправление 2А будет обнаружено датчиком 12 на уровне точки захвата 7А, то есть правое отправление удерживается средством 8 удержания, а левое отправление захватывает конвейер 7 отправлений;
- на этапе 77 в случае погрешности в классификации отправления средство 8 удержания активируют систематически после обнаружения отправления или отправлений датчиком 12, то есть когда оно/они достигает(ют) точки захвата 7А. Это соответствует варианту работы средства 8 удержания согласно известным техническим решениям.
Хронология решений 46 позволяет блоку 10 отслеживать перемещения отправлений и адаптировать активацию во времени до момента, когда отправления будут перемещены конвейером 7. Например, когда отправления отнесены к типу Р или N на основании первого изображения, следующее изображение дает результат «тип Pf», соответствующий месту, где два отправления находятся рядом друг с другом, что не требует подачи соответствующей команды на средство 8 удержания.
Устройство 1 извлечения в соответствии с настоящим изобретением дает двойное преимущество. С одной стороны, сводят к минимуму ложную активацию средства 8 удержания в случае отправлений типа S, что снижает риск повреждения посылки и повышает пропускную способность устройства 1 извлечения. С другой стороны, в случае нестандартного отправления активация средства 8 удержания в нужный момент позволяет избежать одновременного перемещения нескольких отправлений в конвейер 7.
Из Фиг.6 понятно, что после этапа 45 процесс возвращается на этап 61 для нового изображения (или участка изображения, например, из 32 строк).
На Фиг.7 показано другое устройство 100 извлечения из стопы плоских почтовых отправлений 102. Устройство 100 содержит кассету 103, в которой предназначенные для извлечения плоские почтовые отправления 102 размещены в стопе на ребре напротив разборочной плиты 104 и по выравнивающему бортику 105. Кроме того, устройство 100 извлечения содержит конвейер 102 захвата отправлений, вход 109А которого или точка захвата показана здесь в виде двух шкивов, находящихся друг напротив друга. Между разборочной плитой и точкой захвата находится приводное средство 107 перемещения отправлений 102 в направлении извлечения С.
Как показано на Фиг.7, в данном случае устройство 100 извлечения оборудовано устройством обнаружения с двумя камерами 110, отстоящими друг от друга в направлении извлечения С и предназначенными для получения изображений нижнего ребра отправлений 102. Кроме того, предусмотрены два последовательных средства 111 удержания, расположенные по линии в направлении извлечения С. Можно также предусмотреть несколько последовательных средств 111 удержания.
В случае устройства 100 извлечения обе камеры 110 позволяют отслеживать в реальном времени действие приводного средства 107 и средств 111 удержания и, в зависимости от результата этого действия, подавать команду в режиме реального времени на каждое средство 111 удержания через блок 112 обработки данных. Например, в случае когда извлекают одновременно несколько отправлений, двумя средствами 111 удержания можно управлять селективно и по-разному, чтобы задерживать или нет конкретное отправление.
Разумеется, что описание вышеуказанных примеров выполнения не является ограничительным. Например, можно расположить одно или несколько средств 8 удержания противоположно друг другу в направлении перемещения А, чтобы улучшить удержание совместно перемещаемых отправлений и организацию последовательного перемещения отправлений в направлении извлечения С.
Кроме того, способ в соответствии с настоящим изобретением может содержать измерение толщины каждого отправления и/или скорости перемещения отправлений, и/или относительного движения совместно извлекаемых отправлений для определения эффективности удержания отправлений и, следовательно, эффективности их разделения. Таким образом, можно регулировать усилие удержания, прикладываемое к отправлениям средством удержания, чтобы учитывать относительную хрупкость каждого отправления.
На основании изображений MNG отправлений можно также определять присутствие скрепки на ребре отправления, что указывает на то, что отправление является открытым (со скрепкой) или закрытым (без скрепки), и позволяет регулировать усилие удержания, прикладываемое на отправление, чтобы избежать повреждения открытых отправлений.
Почтовая сортировочная машина с устройством рециркуляции отправлений, содержащим ленту с перегородками
Способ сортировки почтовых отправлений при помощи челночных лотков с переменной емкостью загрузки
Способ оптимизации процесса обработки и транспортировки почты в лотках с использованием послойной сортировки
Устройство укладки в стопу на ребро плоских предметов и почтовая сортировочная машина, оборудованная таким устройством
Почтовая сортировочная машина, содержащая средства перемещения посредством зажима, и способ ее применения
Устройство укладки в стопу плоских предметов на ребро и почтовая сортировочная машина, оборудованная, по меньшей мере, одним таким устройством
Устройство подачи плоских предметов и почтовая сортировочная машина
Почтовая сортировочная машина с устройством рециркуляции отправлений, содержащим ленту с перегородками
Способ сортировки почтовых отправлений при помощи челночных лотков с переменной емкостью загрузки
Способ оптимизации процесса обработки и транспортировки почты в лотках с использованием послойной сортировки
Устройство укладки в стопу на ребро плоских предметов и почтовая сортировочная машина, оборудованная таким устройством
Почтовая сортировочная машина, содержащая средства перемещения посредством зажима, и способ ее применения
Устройство укладки в стопу плоских предметов на ребро и почтовая сортировочная машина, оборудованная, по меньшей мере, одним таким устройством
Устройство подачи плоских предметов и почтовая сортировочная машина

