Результат интеллектуальной деятельности: УСТРОЙСТВО ВЫПУСКА ТРОСА СВЯЗКИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к орбитальным тросовым системам.
Известны устройства выпуска троса связки двух космических аппаратов, выполненные в виде невращающихся ("безынерционных") катушек, которые использовались, в частности, в космических экспериментах серии SEDS [Carroll J.A. SEDS deployer design and flight performance. AIAA Paper N 93-4764, 1993., Doty P, Rupp C, Smith H. First and second flights of the Small Expendable Deployer System // AIAA 1995 Space Programs and Technologies Conference, September 26-28, 1995 / Huntsville, Alabama, AIAA 95-4075], причем катушка для эксперимента SEDS-2 была снабжена системой управления. Такие катушки могут использоваться только для выпуска тросов с относительно небольшим натяжением [Doty P., Rupp С, Smith Н. First and second flights of the Small Expendable Deployer System // AIAA 1995 Space Programs and Technologies Conference, September 26-28, 1995 / Huntsville, Alabama, AIAA 95-4075].
Известно устройство выпуска троса связки двух космических аппаратов, устанавливаемое на основном спутнике и предназначенное для отведения на тросе привязного субспутника [Rupp С.С, Kissel R.R. Tetherline system for orbiting satellites. U.S. Patent N 4083520, April 11, 1978, Int. C1. B64G 1/00, US C1. 244/167; 244/161]. Это устройство содержит ферму с механизмом ее выдвижения, на конце которой установлен закрепленный на конце троса привязной субспутник, а в основании которой расположена лебедка для выпуска троса. Лебедка содержит вращающийся барабан с тросом, электродвигатель с системой управления, датчики текущей длины, скорости выпуска и силы натяжения выпускаемого троса, направляющие ролики. Одним из недостатков этого устройства является отсутствие элементов, обеспечивающих возможность фиксации барабана в транспортном положении лебедки или отрезания троса в нештатной ситуации.
Известно выбранное за прототип устройство выпуска троса связки двух космических аппаратов и система управления для него [патент РФ №2148535]. Устройство содержит вращающийся барабан с тросом, электродвигатели, электрически связанные с системой управления, датчик натяжения, резак, арретир и направляющие ролики. Дополнительный электродвигатель связан через редуктор с барабаном в герметичном корпусе с выходным фланцем, на котором установлена безынерционная катушка. Барабан в корпусе, катушка, датчики натяжения, резак, арретир и направляющие ролики, электродвигатели с редуктором и система управления установлены на одном из космических аппаратов связки, а на другом космическом аппарате связки установлен стыковочный адаптер с узлом крепления свободного конца троса.
Инерция устройства не позволяет быстро реагировать на резкие изменения натяжения троса в процессе выпуска и неизбежно приведет к появлению рывка в конце размотки безынерционной катушки, при этом масса на конце троса затормозится и под действием силы натяжения в тросе может начать двигаться в обратном направлении, что приведет к появлению петель и спутыванию троса. Кроме того, установка барабана с тросом в герметичном корпусе приведет к необходимости создания на выходе в открытый космос вакуумного уплотнения. При выходе троса через уплотнение неизбежно возникают значительные силы трения, и либо уплотнение быстро выйдет из строя, либо трос перегорит в месте контакта с нагретым уплотнением. Все это приводит к ненадежной работе устройства, недостаточной точности развертывания троса.
Задачей является повышение надежности работы устройства, повышение точности развертывания и удобства в эксплуатации тросовой системы на орбите и возможность увеличения длины троса.
Для решения задачи предложено 2 варианта устройства. Первый вариант - устройство выпуска троса связки двух космических аппаратов содержит основной корпус, в котором установлен подвижный корпус с подпружиненным основанием (подвижный подпружиненный корпус). На основании закреплены электродвигатели, оборудованные датчиками угла поворота ротора и электрически связанные с системой управления. На валах электродвигателей расположены направляющие ролики и зубчатые колеса, связанные между собой центральным зубчатым колесом, снабженным управляемым электромагнитным тормозом и установленным на подвижном корпусе. Каждый направляющий ролик снабжен прижимным роликом. Внутри основного корпуса неподвижно установлена безынерционная катушка, причем ось катушки установлена соосно с осью направляющей для выпуска троса. На выходе троса из подвижного корпуса установлены резак и рычаг с роликом на конце, на оси которого закреплен датчик угла поворота, а между пружинами подвижного корпуса и стенкой основного корпуса - датчики силы в количестве ≥1. Безынерционная катушка может быть оборудована приводом, обеспечивающим ее вращение, и поводком для укладки троса, снабженным электроуправляемым приводом.
Количество датчиков силы обусловлено требованием к определению точности натяжения троса через подвижный подпружиненный корпус. Управление выпуском троса в устройстве обеспечивает набор направляющих роликов с сопутствующими элементами, который позволяет за счет специальной конструкции повысить надежность и точность развертывания троса. Датчик углового перемещения и датчики силы обеспечивают измерение силы натяжения троса, что позволяет более точно и надежно производить процесс выпуска троса.
Для удобства в эксплуатации тросовой системы на орбите и повышения точности развертывания в устройстве могут быть предусмотрены привод безынерционной катушки, обеспечивающий вращение катушки вокруг своей оси, и поводок, обеспечивающий укладку троса по заданному алгоритму, который перемещается системой управления, обеспечивающей требуемый вид намотки троса, например вплотную или диагональную.
Второй вариант - устройство выпуска троса связки двух космических аппаратов содержит основной корпус, в котором установлен подвижный корпус с подпружиненным основанием. На основании закреплены электродвигатели, оборудованные датчиками угла поворота ротора и электрически связанные с системой управления. На валах электродвигателей расположены направляющие ролики и зубчатые колеса, связанные между собой центральным зубчатым колесом, снабженным управляемым электромагнитным тормозом и установленным на подвижном корпусе. Каждый направляющий ролик снабжен прижимным роликом. На выходе троса из подвижного корпуса установлены резак и рычаг с роликом на конце, на оси которого закреплен датчик угла поворота, а между пружинами подвижного корпуса и стенкой основного корпуса - датчики силы в количестве ≥1. Количество датчиков силы обусловлено требованием к определению точности натяжения троса через подвижный подпружиненный корпус. Управление выпуском троса в устройстве обеспечивает набор направляющих роликов с сопутствующими элементами, который позволяет за счет специальной конструкции повысить надежность и точность развертывания троса. Датчик углового перемещения и датчики силы обеспечивают измерение силы натяжения троса, что позволяет более точно и надежно производить процесс выпуска троса. Устройство содержит безынерционные катушки в количестве ≥2 с тросом, которые установлены на барабане, закрепленном на основном корпусе, а барабан снабжен электроуправляемым приводом, связанным с системой управления, причем конец троса одной катушки соединен с началом троса другой катушки соединительным звеном.
Количество датчиков силы обусловлено теми же требованиями.
Катушки с тросом, установленные специальным образом, позволяют повысить удобства в эксплуатации тросовой системы и возможность увеличения длины троса.
Таким образом, совокупность отличительных признаков необходима и достаточна для решения поставленной задачи
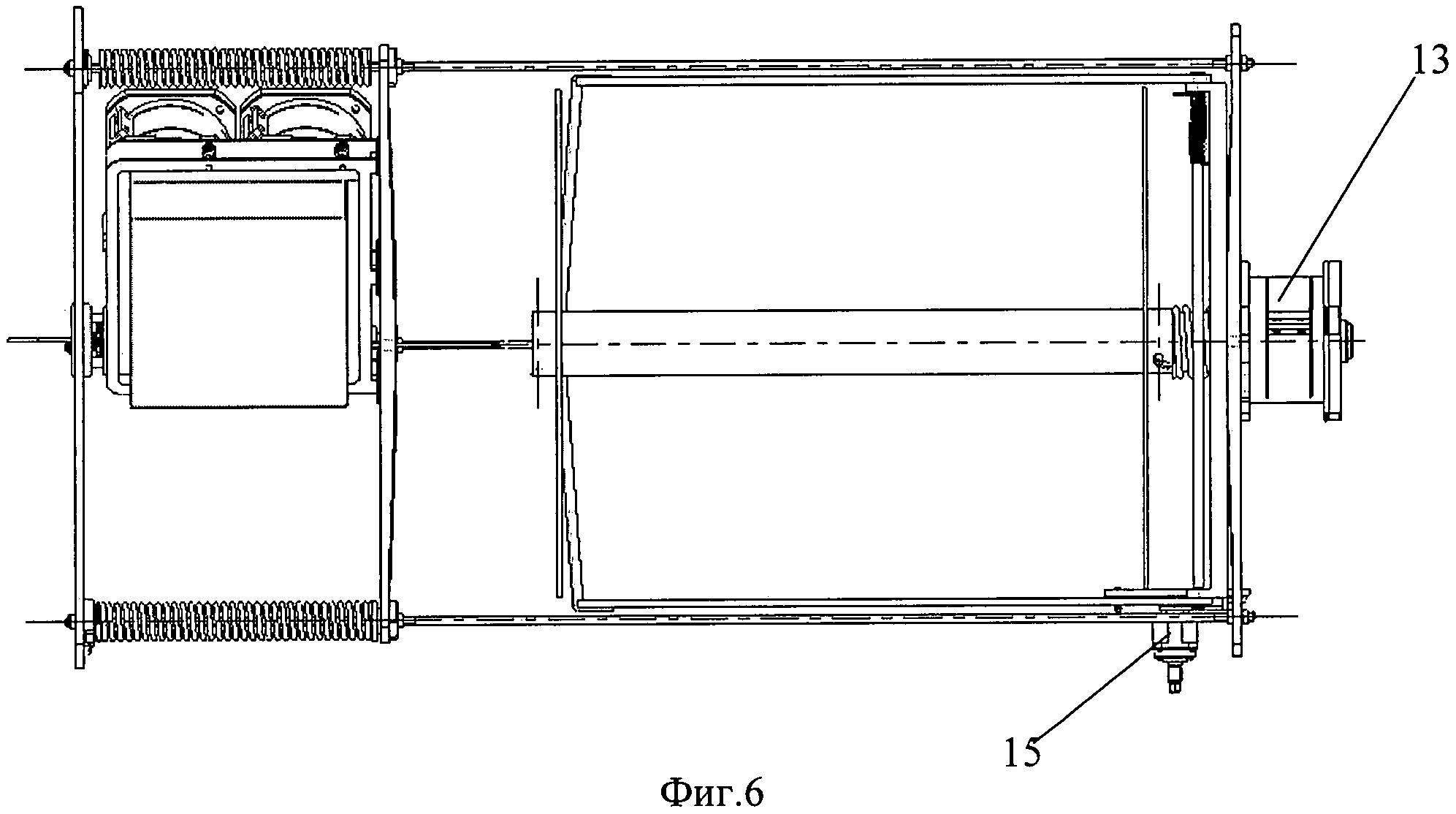
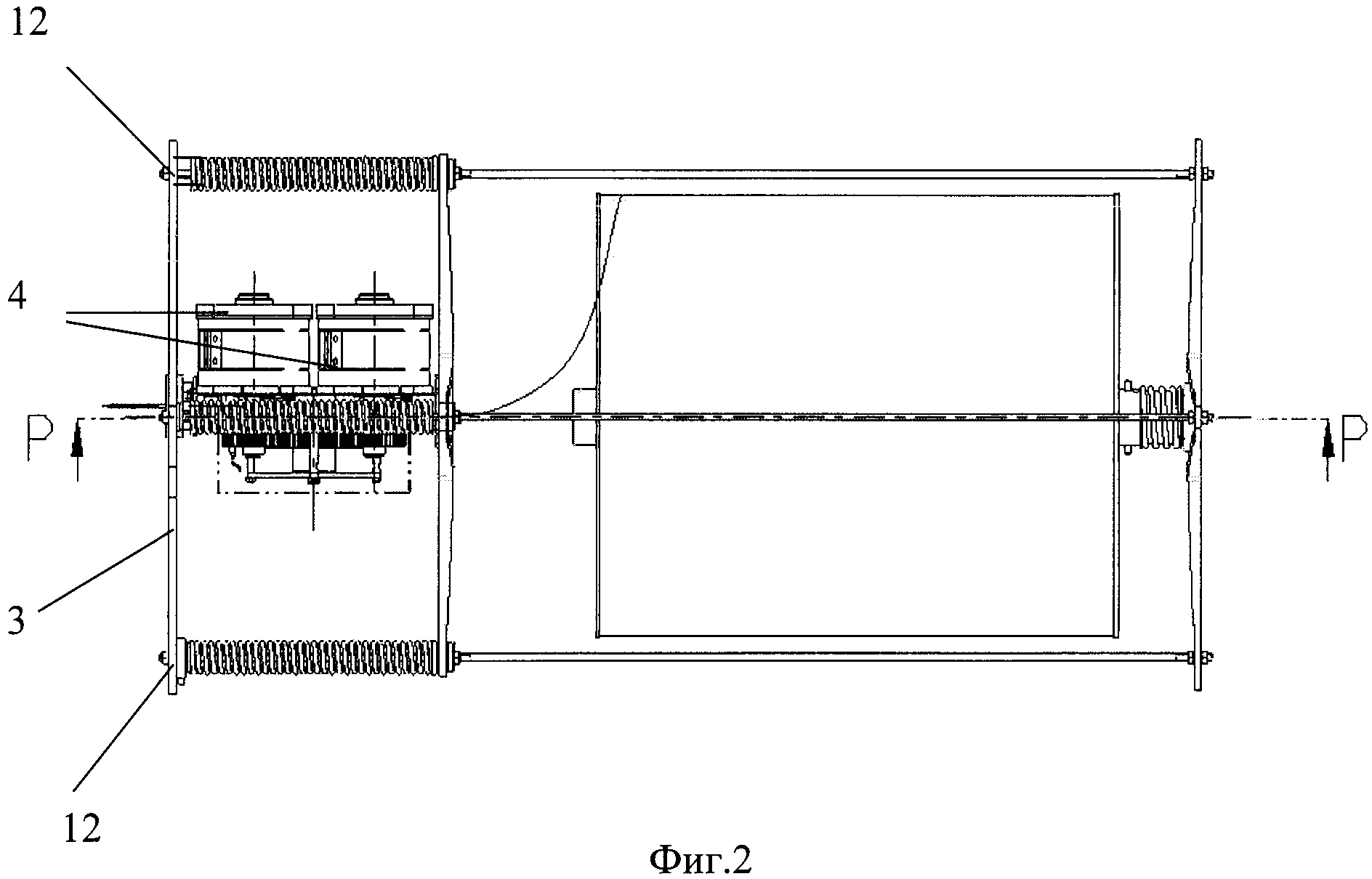
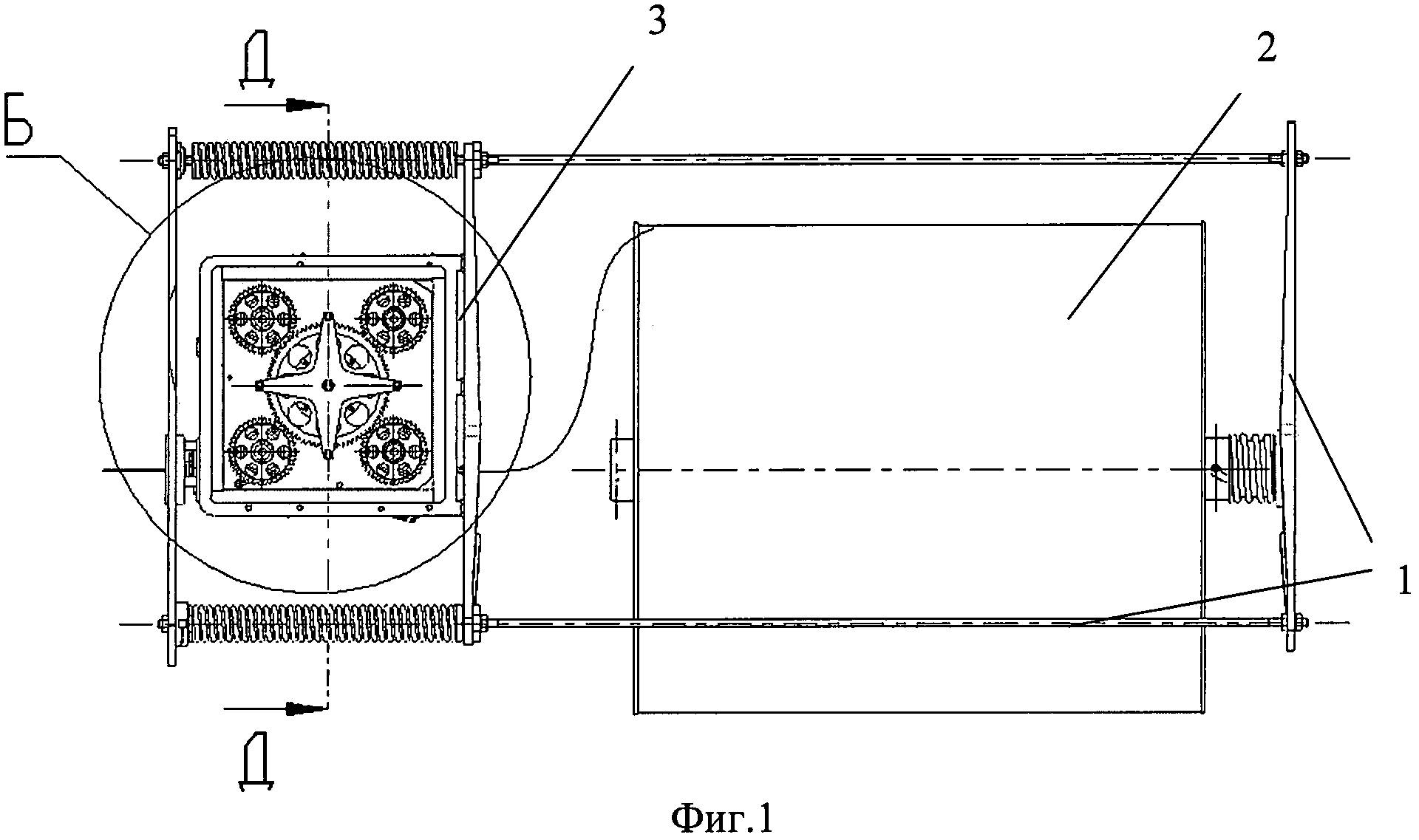
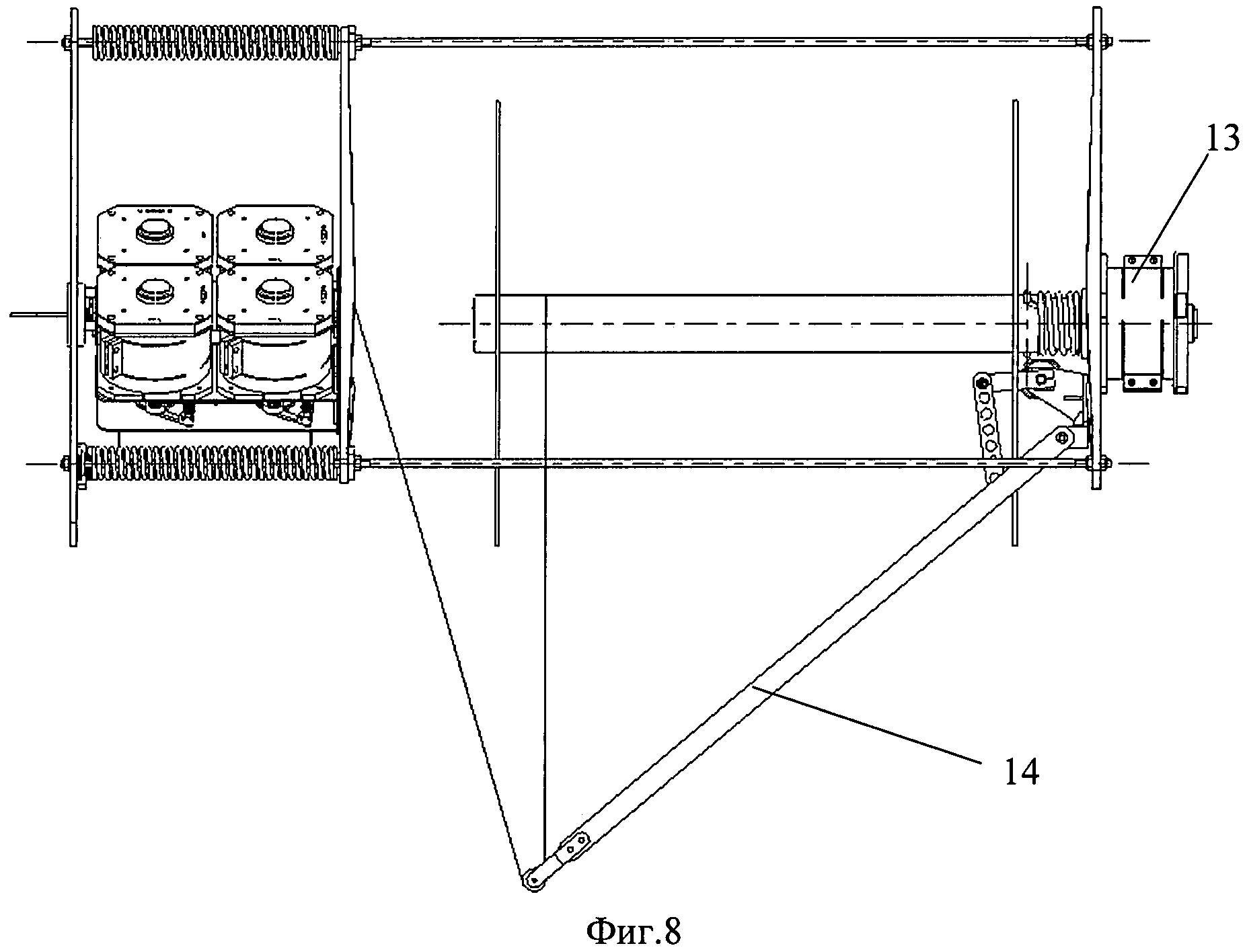
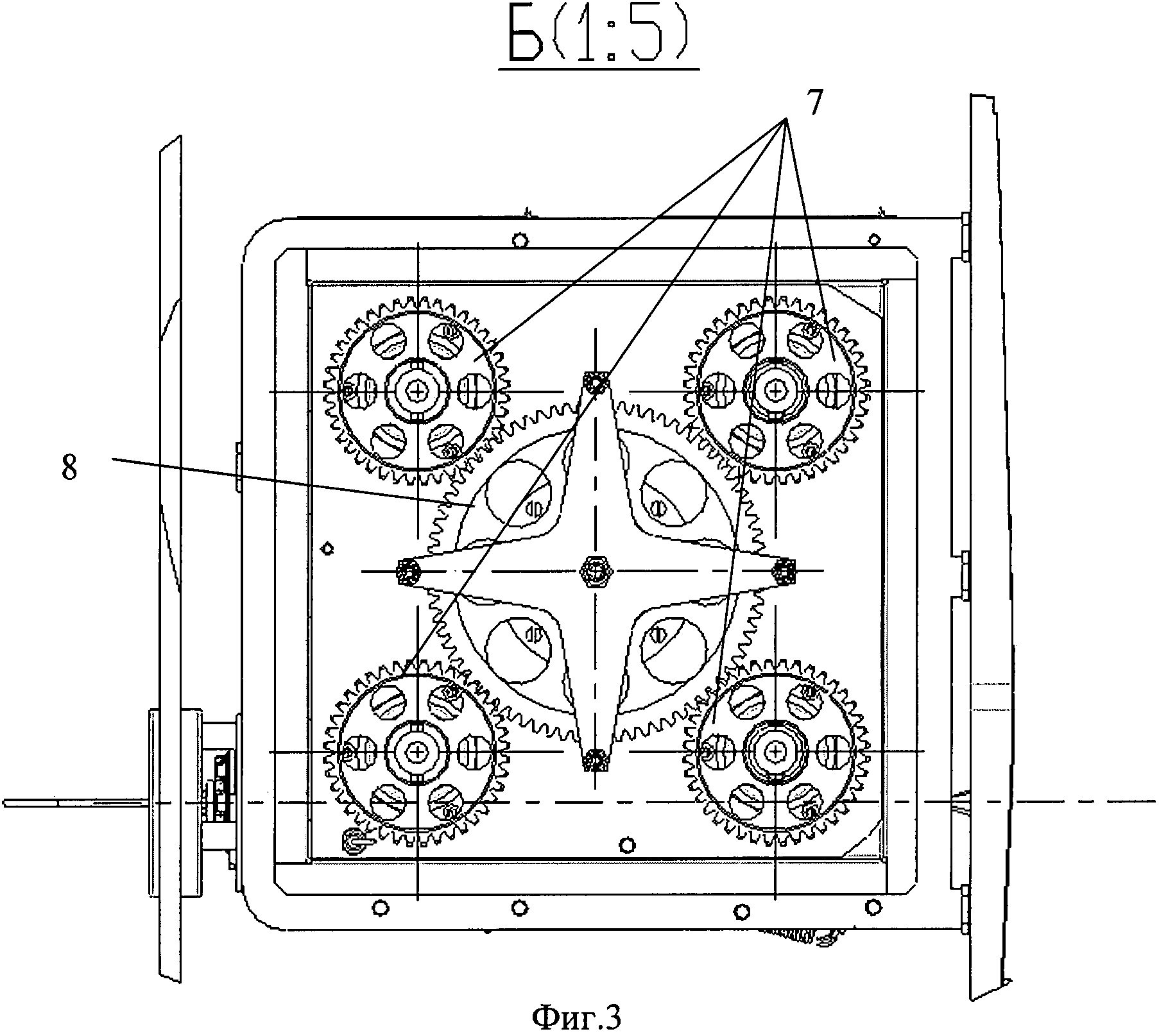
Первое устройство выпуска троса связки двух космических аппаратов содержит: основной корпус 1, в котором установлена безынерционная катушка 2 с тросом, подвижный подпружиненный корпус 3, электродвигатели 4, электрически связанные с системой управления, направляющие ролики 5 с прижимными роликами 6, зубчатые колеса 7, связанные между собой центральным зубчатым колесом 8, снабженным управляемым электромагнитным тормозом 9, установленным на подвижном корпусе 3. На выходе троса из подвижного корпуса 3 установлены резак 10 и рычаг 11 с роликом на конце, на оси которого закреплен датчик угла поворота, а датчики силы 12 - на передней стенке основного корпуса 1 (фиг.1, фиг.2). На основном корпусе 1 может быть установлен привод 13 катушки 2 с поводком 14, снабженным электроуправляемым приводом 15.
Второе устройство содержит:
основной корпус 1, на котором установлены безынерционные катушки 2 с тросом, подвижный подпружиненный корпус 3, электродвигатели 4, электрически связанные с системой управления, направляющие ролики 5 с прижимными роликами 6, зубчатые колеса 7, связанные между собой центральным зубчатым колесом 8, снабженным управляемым электромагнитным тормозом 9, установленным на подвижном корпусе 3. На выходе троса из подвижного корпуса 3 установлены резак 10 и рычаг 11 с роликом на конце, на оси которого закреплен датчик угла поворота, и датчики силы 12 - на передней стенке основного корпуса 1 (фиг.1, фиг.2)
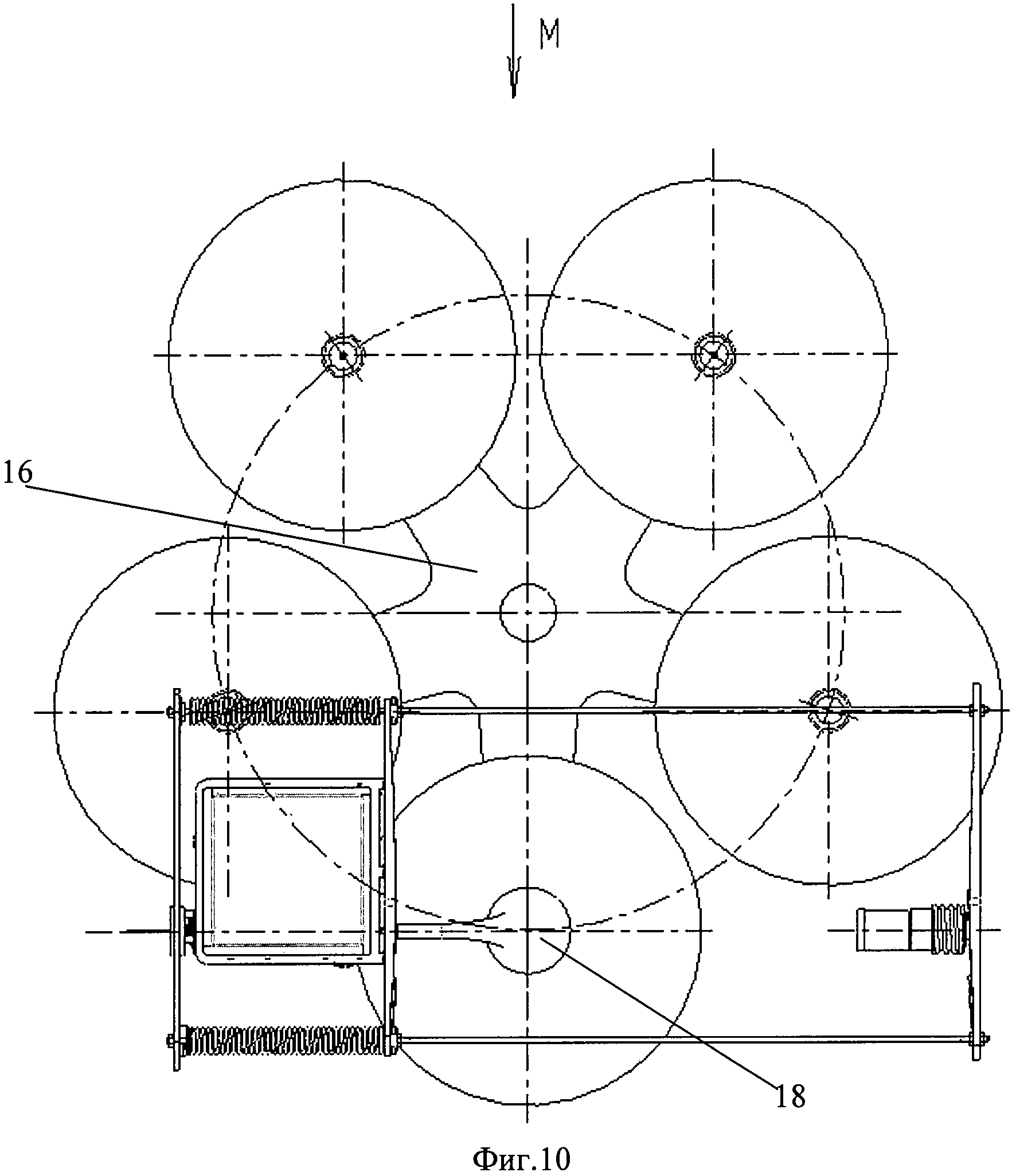
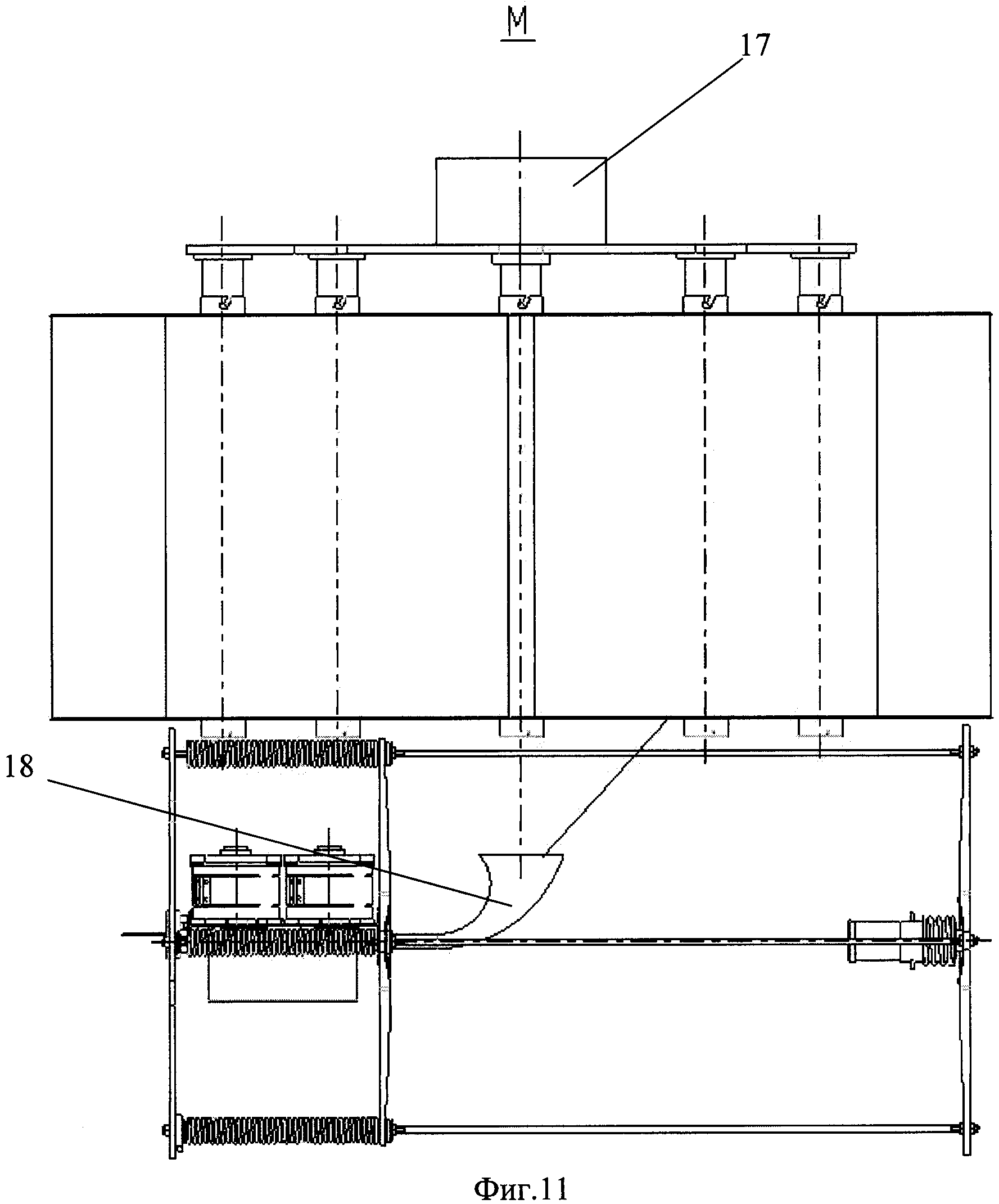
Устройство снабжено барабаном 16 с набором безынерционных катушек с приводом 17 и направляющим раструбом 18 для троса.
На фиг.3 изображены зубчатые колеса 7 на валах электродвигателей, связанные между собой центральным зубчатым колесом 8, снабженным управляемым электромагнитным тормозом.
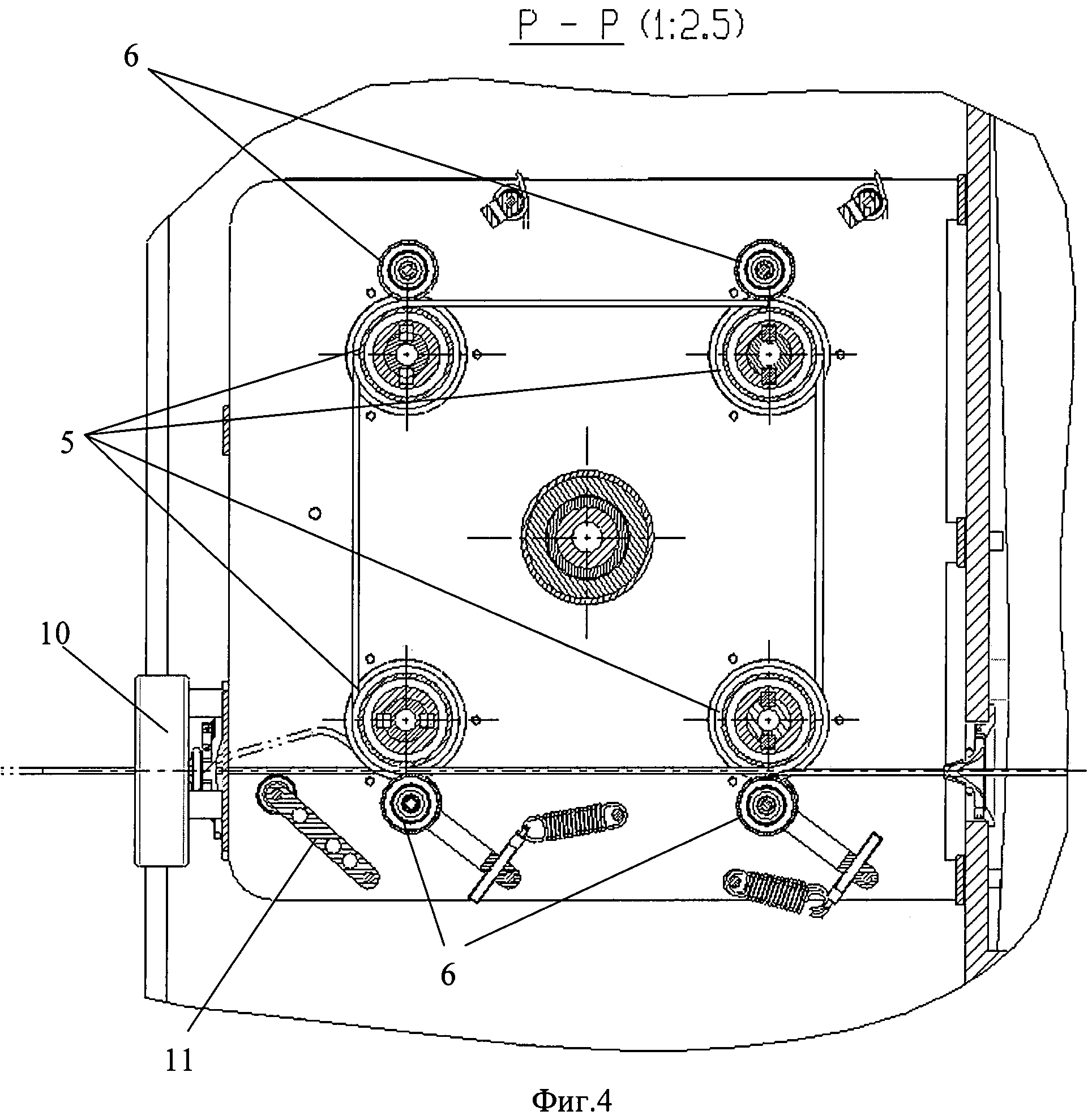
На фиг.4 изображены направляющие ролики 5, прижимные ролики 6, рычаг 11 с закрепленным на его оси датчиком углового перемещения на выходе из устройства и резак 10, установленный на выходе троса из подвижного корпуса.
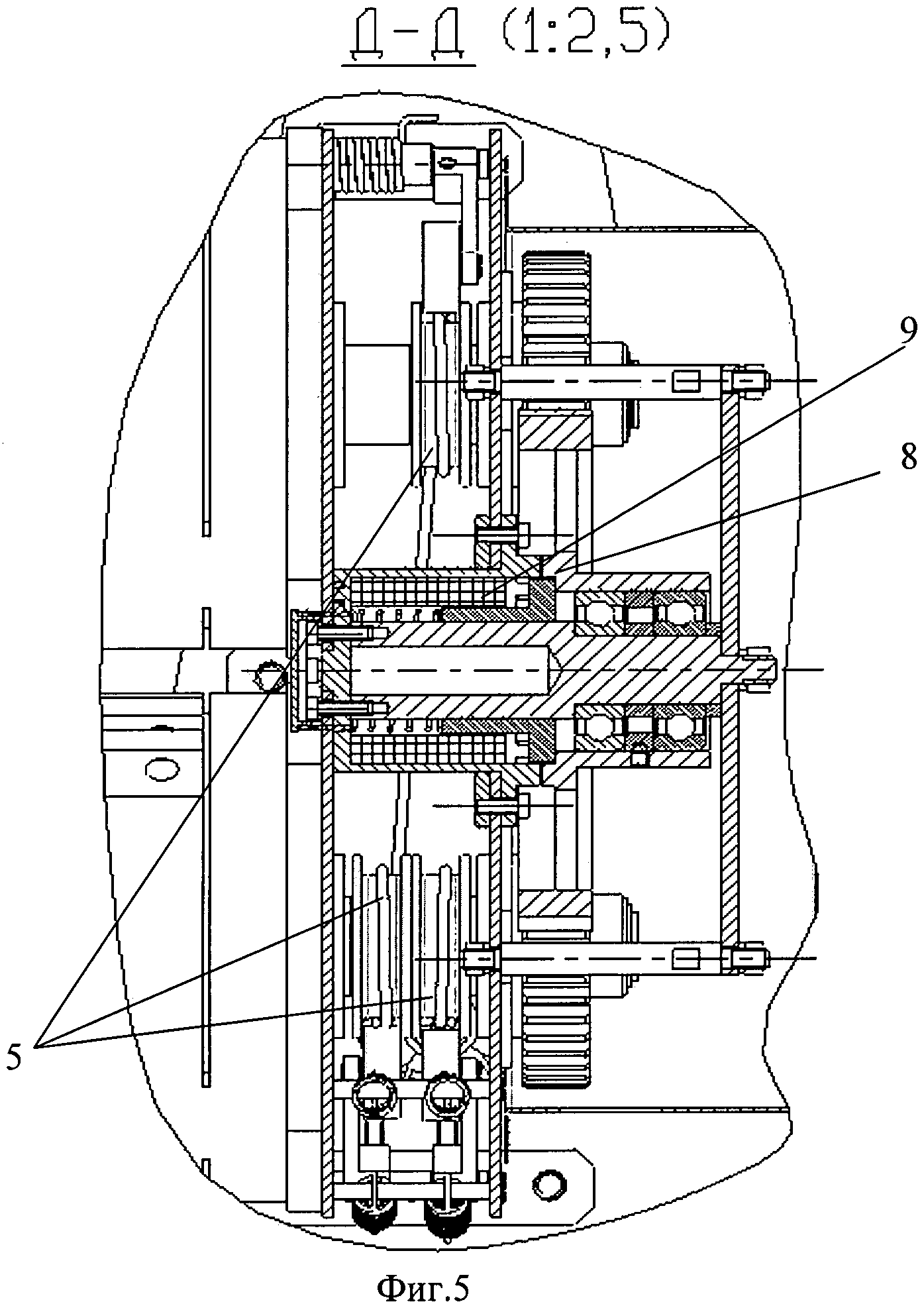
На фиг.5 показан разрез Д-Д, на котором изображены направляющие ролики 5, центральное зубчатое колесо 8, снабженное электромагнитным тормозом 9.
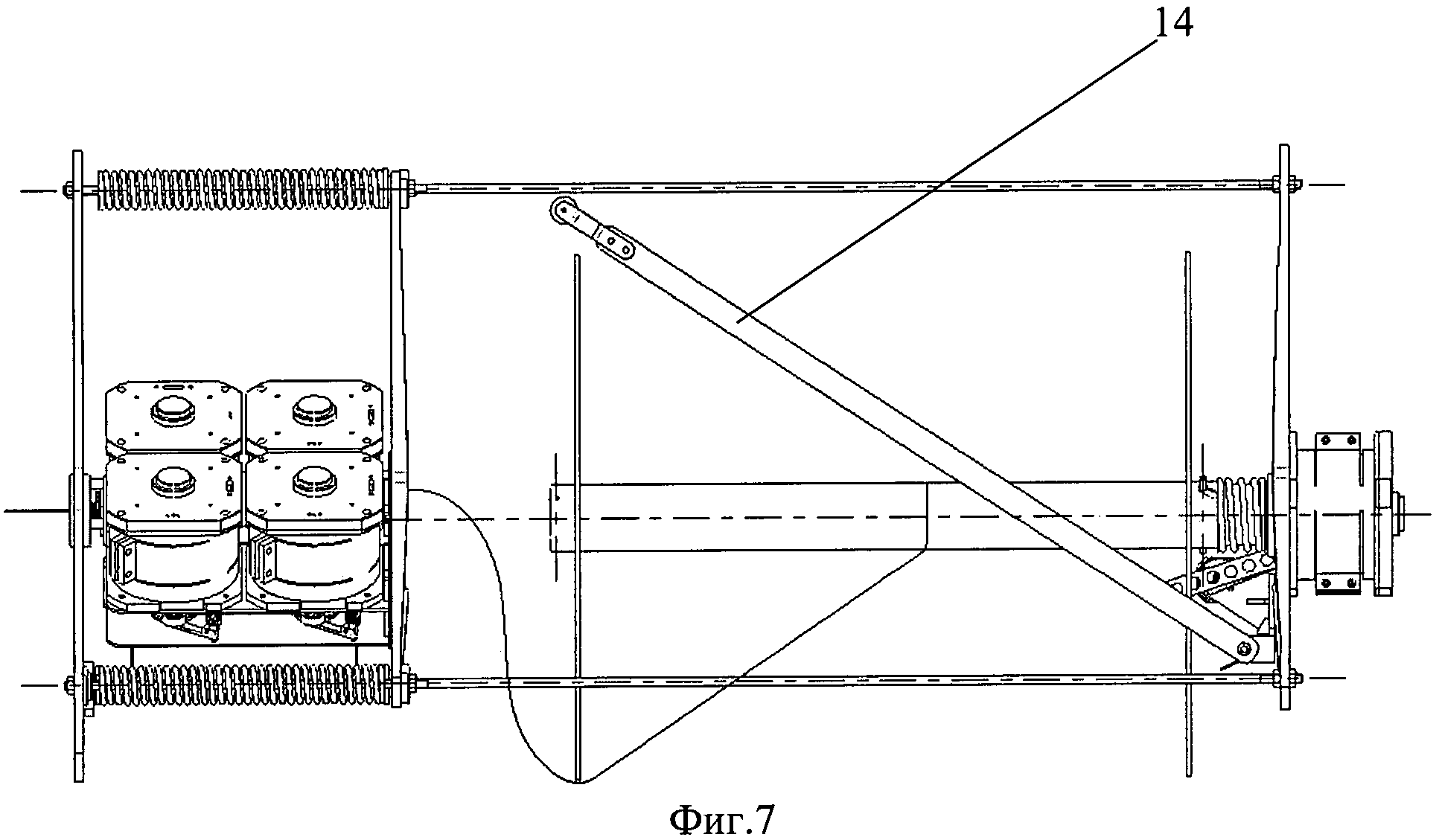
На фиг.6 и фиг.7 изображена катушка 2 с приводом 13, обеспечивающим ее вращение, и поводком 14 для укладки троса, снабженным электроуправляемым приводом 15 в исходном положении (в процессе выпуска троса).
На фиг.8 изображено начальное положение поводка 14 для укладки троса в процессе сматывания троса.
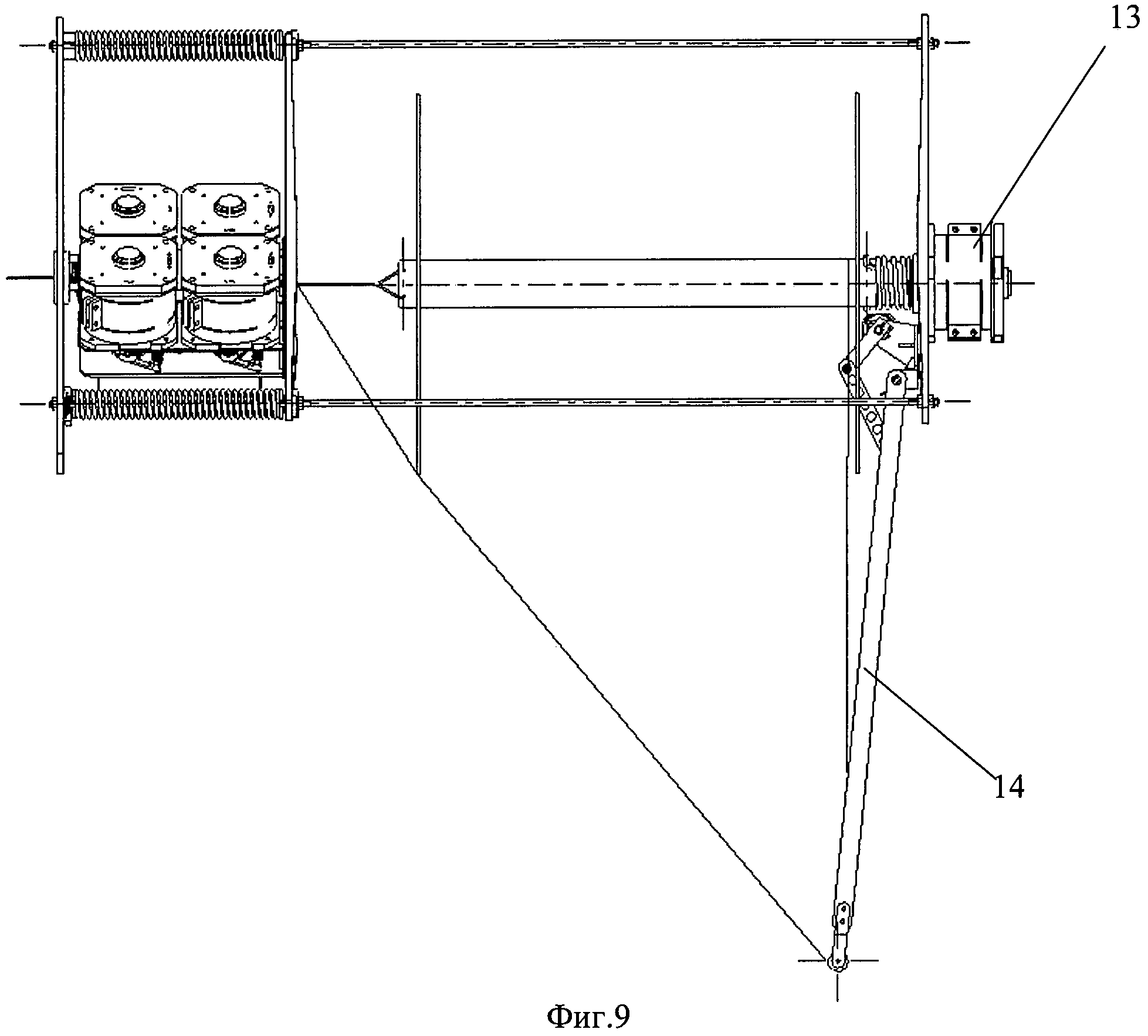
На фиг.9 изображено конечное положение поводка 14 для укладки троса в процессе сматывания троса.
На фиг.10 изображены барабан 16 с набором безынерционных катушек и направляющий раструб 17 для троса.
На фиг.11 изображены вид сверху барабана 16 с набором безынерционных катушек, привод барабана 18 и направляющий раструб для троса 17.
Устройство обеспечивает работу в трех режимах.
Вариант 1
Управление выпуском троса в устройстве обеспечивает набор направляющих роликов 5. Вокруг первого и последнего ролика трос совершает один оборот, а вокруг остальных трос совершает 1,25 оборота. Проходя, например, по шести роликам, трос в общей сложности совершает 7 оборотов, что обеспечивает эффект самоторможения, то есть при неподвижных роликах невозможно протянуть трос, прикладывая сколь угодно большое усилие. Выпуск троса обеспечивается при вращении направляющих роликов 5 без проскальзывания троса по поверхности роликов, что исключает выделение тепла и нагрев деталей, связанных с тросом в процессе торможения. Кроме того, каждый ролик оборудован прижимным роликом 6, исключающим самопроизвольное движение троса вне направляющих роликов 5. Информация с датчика углового перемещения и датчиков силы 12 преобразуется в системе управления в силу натяжения троса.
Первый режим при малом натяжении троса.
Устройство обеспечивает выпуск троса при помощи электродвигателей 4, например четырех. Команда на включение электродвигателей поступает от датчика углового перемещения, который настроен на минимальное натяжение троса, достаточное для начала выпуска троса. Минимальное натяжение троса определяется свойствами троса и должно превосходить остаточные напряжения в тросе после выхода его из устройства, что обеспечивает прямолинейность выпущенной части троса. Электродвигатели 4 работают синхронно, т.к. они связаны между собой зубчатыми колесами. Электродвигатели могут работать каждый отдельно или в любом сочетании (попарно, три или все сразу) в зависимости от нагрузки и режимов работы, например, в режиме торможения, когда один двигатель не может создать требуемый тормозной момент или в случае перегрева двигателя в процессе работы.
Второй режим работы при отключенных электродвигателях.
Вариант 1.
При увеличении силы натяжения до величины, превосходящей силы сопротивления в механизме выпуска троса, электродвигатели 4 выключаются и выпуск троса происходит в пассивном режиме, при этом контролируются скорость выпуска и длина троса датчиками угла поворота ротора, а сила натяжения троса датчиками силы 12, например тензодатчиками. Сила натяжения троса контролируется датчиками силы (тензодатчиками), двумя или больше, установленными между передней стенкой основного корпуса и пружинами, передающими силу натяжения троса через подвижный подпружиненный корпус на датчики. Так как точность тензодатчиков зависит от пределов измеряемой силы, то целесообразно установить их с разными пределами измерений и, соответственно, точностью измерения, причем максимальные пределы измеряемой силы должны превосходить разрывное усилие применяемого троса.
Подвижность корпуса осуществляется, например, с помощью пружины. Подвижный подпружиненный корпус повышает надежность работы устройства в нештатных ситуациях (резкие рывки троса, резкое снижение силы натяжения). Пружина позволяет уменьшить динамические нагрузки на тросе, которые могут возникнуть, например, при столкновении троса с космическим мусором, метеоритами и тем самым предотвратить обрыв троса.
Третий режим работы (торможение) включается при необходимости уменьшения скорости выпуска троса или остановки выпуска на заданной длине. В этом режиме электродвигатели 4 (один или несколько) включаются в генераторный режим и создают тормозной момент на валах направляющих роликов 5, тем самым уменьшая скорость выпуска троса по заданному алгоритму вплоть до полной остановки. Ток, вырабатываемый электродвигателями в генераторном режиме, проходит через реостаты, установленные на внешней поверхности космического аппарата, которые рассеивают выделяемую энергию в открытое пространство. После полной остановки роликов 5 можно включить электроуправляемый тормоз 9, который блокирует центральное зубчатое колесо 8, связанное со всеми зубчатыми колесами 7 на валах направляющих роликов, и отключить электродвигатели 4. В таком положении работают только система управления, которая через датчик угла поворота преобразует угол поворота подпружиненного рычага 11 в силу натяжения троса, и датчики силы, сигнал которых также преобразуется в силу натяжения троса, когда силы натяжения троса выходят за пределы измерения датчика, предназначенного для измерения малых величин натяжения (например, от 0 до 100 г). При этом происходит охлаждение электродвигателей и реостатов.
Для продолжения процесса выпуска троса необходимо подать ток на катушку электромагнита тормоза 9, при этом разблокируется центральное зубчатое колесо 8 и продолжится выпуск троса по заданному алгоритму, который обеспечивается управлением скоростью вращения электродвигателей.
Для сматывания троса предусмотрены привод катушки 13, обеспечивающий вращение катушки вокруг своей оси, и поводок 14, обеспечивающий укладку троса по заданному алгоритму. При необходимости сматывания троса поводок 14 переводится из своего крайнего положения, которое используется в процессе выпуска троса (фиг.6, 7), в положение для управления укладкой троса (фиг.8, 9).
Поводок 14 приводится в движение при помощи электроуправляемого привода 15 поводка 14, управляемого по заданной программе, обеспечивающей требуемый вид намотки троса, например вплотную или диагональную.
Сматывание троса обеспечивается электродвигателями 4, которые управляют выпуском троса. Эти электродвигатели включаются на реверс и начинают втягивание троса, при этом преодолевается основная сила натяжения троса. Привод катушки 13, который состоит из одного двигателя и вращающейся ступицы, обеспечивает лишь подмотку троса на катушку, а поводок 14 при помощи управляемого по заданной программе привода поводка 15 обеспечивает равномерную или диагональную укладку троса.
Вариант 2
Одной из проблем в тросовых системах больших размеров (50…100 км и более) являются размеры катушки. Чем больше длина троса, тем больше сила натяжения троса при одинаковых массах на концах троса, следовательно, диаметр троса должен быть больше. Катушка с тросом из кевлара диаметром 3 мм и длиной 20 км имеет диаметр 600 мм, длину 800 мм и массу 70 кг, а размеры катушки длиной 100 км становятся соизмеримы с размерами грузового отсека космического корабля.
Одним из решений этой задачи является использование набора безынерционных катушек, которые могут быть доставлены на орбиту разными космическими аппаратами. Перед намоткой троса на каждую катушку необходимо вывести и закрепить на внешней стороне катушки первый конец троса. Это необходимо для того, чтобы в дальнейшем можно было соединить специальным соединительным звеном или узлом конец одной катушки с началом другой.
Катушки с тросом устанавливают на барабан 16, оборудованный электроуправляемым приводом 17. Перед окончанием размотки троса с одной катушки по сигналу системы управления начинается торможение троса вплоть до его полной остановки. После остановки выпуска троса система управления поворачивает барабан 16 таким образом, чтобы следующая катушка с тросом оказалась на месте, которое занимала пустая катушка, а т.к. конец первой катушки связан с началом следующей, то процесс выпуска троса может быть продолжен.
Таким образом, происходит выпуск троса со всех катушек, установленных на барабане 16. При необходимости увеличить длину троса надо установить на барабан 16 новые катушки в необходимом количестве, соединить конец выпущенного троса с первой катушкой и начало и конец троса остальных катушек, после чего продолжить выпуск троса. При этом максимальная длина троса будет ограничена лишь пределами прочности троса.
Таким образом, предлагаемое устройство выпуска троса связки двух космических аппаратов обладает повышенной надежностью работы, повышенной точностью развертывания, удобством в эксплуатации устройства на орбите, а также возможностью увеличения длины троса.
Установка комплексной очистки стоков (варианты)
Способ очистки медьсодержащего сульфидно-щелочного смешанного стока
Способ очистки медьсодержащих сточных вод производства акриловой кислоты (варианты)
Устройство для определения направления на источник гамма-излучения по двум координатам в телесном угле 2π стерадиан
Разборный инверсно-магнетронный вакуумметрический преобразователь с дополнительным углеродным автоэлектронным эмиттером, защищенным от ионной бомбардировки
Устройство для испытания мобильных роботов
Система импульсной лазерной локации
Устройство для измерения плотности потока нейтронов ядерной энергетической установки в условиях фоновой помехи от гамма-квантов и высокоэнергетичных космических электронов и протонов
Робототехническая система сервисного космического аппарата с силомоментной обратной связью
Способ очистки технологической жидкости от механических примесей и плавающей жидкой среды
Установка комплексной очистки стоков (варианты)
Способ очистки медьсодержащего сульфидно-щелочного смешанного стока
Способ очистки медьсодержащих сточных вод производства акриловой кислоты (варианты)
Устройство для определения направления на источник гамма-излучения по двум координатам в телесном угле 2π стерадиан
Разборный инверсно-магнетронный вакуумметрический преобразователь с дополнительным углеродным автоэлектронным эмиттером, защищенным от ионной бомбардировки
Устройство для испытания мобильных роботов
Система импульсной лазерной локации
Устройство для измерения плотности потока нейтронов ядерной энергетической установки в условиях фоновой помехи от гамма-квантов и высокоэнергетичных космических электронов и протонов
Робототехническая система сервисного космического аппарата с силомоментной обратной связью
Способ очистки технологической жидкости от механических примесей и плавающей жидкой среды

