Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТОМ
Вид РИД
Изобретение
Изобретение относится к области систем управления летательными аппаратами и может быть использовано для улучшения характеристик устойчивости и управляемости аппаратов и повышения безопасности их полета.
Известны системы ручного управления боковым и продольным движением самолета (см. В.А.Боднер. Теория автоматического управления полетом. М.: Машиностроение, 1964 г., стр.178, И.А.Михалев и др. Система автоматического управления самолетом. М.: Машиностроение, 1976 г., стр.259, 394, Г.И.Загайнов, Ю.П.Гуськов. Управление полетом самолета. М.: Машиностроение, 1980 г., стр.161-170). В этих системах используются статические алгоритмы управления, и в их состав входят:
- блок датчиков параметров движения самолета и отклонений рычагов управления;
- блок фильтрации сигналов датчиков;
- блоки позиционного управления продольным движением самолета, движениями крена и рыскания;
- блоки управления приводами рулей высоты, элеронов, руля направления.
В блоках позиционного управления формируется сумма фильтрованных сигналов параметров движения самолета и отклонений рычагов управления с соответствующими коэффициентами. Следует отметить, что используемые фильтры имеют в статике конечные, в частности нулевые, коэффициенты усиления. Недостатками статических алгоритмов являются:
- трудность обеспечения нормируемых статических характеристик управляемости, т.е. соответствия между отклонениями рычагов управления и контролируемыми параметрами движения самолета, в связи с сильной зависимостью их от режима полета и характеристик самолета;
- трудность обеспечения заданных ограничений параметров движения самолета по указанным выше причинам.
Известна система дистанционного управления самолета F-16 США (см. The Design of the F-16 High-Alpha Flight Control Characteristics and Control System Concept. AIAA Paper №79-0403, 1979, а также Обзор ЦАГИ №641, 1984 г.).
Эта система содержит блок датчиков параметров движения самолета и отклонений рычагов управления, блок фильтрации сигналов датчиков, блок формирования сигналов управления продольным движением самолета, включающий блок позиционного управления продольным движением и блок интегрального управления продольным движением самолета, блок формирования сигналов управления движением крена, включающий блок позиционного управления движением крена, блок формирования сигналов управления движением рыскания, включающий блок позиционного управления движением рыскания, блок перекрестных связей между каналами крена и рыскания, блока управления приводами элеронов, рулей высоты и направления.
Эта система обеспечивает благодаря использованию в продольном канале управления интеграла от разности между текущим значением вертикальной перегрузки и ее заданным значением, определяемым перемещением рычага управления:
- заданную продольную балансировку самолета на всех режимах полета;
- заданную статическую характеристику управляемости продольным движением (градиент усилия на рычаге управления по перегрузке);
- ограничение вертикальной перегрузки ее допустимым значением при максимальном отклонении рычага управления.
Недостатками этой системы являются:
- существенная зависимость динамических характеристик продольного движения самолета от запаса его продольной устойчивости, которая определяется скоростью полета и центровкой самолета;
- использование только статических законов управления в каналах крена и рысканья затрудняет обеспечение заданных статических характеристик управляемости самолета, ограничения угловой скорости крена и угла скольжения, а также парирование моментов крена и рысканья, возникающих вследствие несимметричного обтекания самолета на больших углах атаки или несимметричности конфигурации самолета с подвесками.
Задачей изобретения является создание системы управления самолетом, обеспечивающей заданные соотношения между отклонениями рычагов управления и контролируемыми параметрами движения, заданные ограничения контролируемых параметров и парирование возмущений по крену и рысканью от несимметричного обтекания самолета. Техническим результатом является улучшение характеристик устойчивости и управляемости самолета и повышение безопасности полета.
Задача и технический результат достигаются тем, что в системе управления самолета, включающей блок датчиков параметров движения самолета и перемещений рычагов управления, блок фильтрации сигналов датчиков, блок формирования сигналов управления продольным движением самолета, содержащий блок позиционного управления продольным движением и блок интегрального управления продольным движением, блок управления приводом руля высоты, блок формирования сигналов управления движением крена, содержащий блок позиционного управления движением крена, блок формирования сигналов управления движением рыскания, содержащий блок позиционного управления движением рыскания, блок перекрестных связей между каналами крена и рыскания, блок управления приводами элеронов, блок управления приводом руля направления, приводы руля высоты, элеронов и руля направления, причем входы блоков позиционного управления продольным движением, интегрального управления продольным движением, позиционного управления движением крена и позиционного управления движением рыскания соединены с выходами блока фильтрации сигналов датчиков, выходы блоков позиционного управления продольным движением и интегрального управления продольным движением соединены с выходом блока управления приводом руля высоты, выход блока позиционного управления движением крена соединен с входом блока управления приводами элеронов и с входом блока перекрестных связей между каналами крена и рыскания, выход блока позиционного управления движением рыскания соединен с входами блоков перекрестных связей между каналами крена и рыскания и блоком управления приводом руля направления, в блок формирования сигналов управления продольным движением введен блок оценки продольной устойчивости самолета, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход соединен с входом блока управления приводом руля высоты, в блок формирования сигналов управления движением крена введены блок интегрального управления движением крена, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход с входами блока управления приводами элеронов и блока перекрестных связей между каналами крена и рыскания, а также введен блок компенсации возмущений по крену, вход которого соединен с блоком фильтрации сигналов датчиков, а выход с входом блока управления приводами элеронов, в блок формирования сигналов управления движением рыскания введен блок интегрального управления движением рыскания, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход соединен с входом блока управления приводом руля направления и с входом блока перекрестных связей между каналами крена и рыскания.
На фигуре 1 представлена блок-схема предлагаемой системы, где:
1 - блок датчиков параметров движения самолета и перемещений рычагов управления;
2 - блок фильтрации сигналов датчиков;
3 - блок формирования сигналов управления продольным движением самолета;
4 - блок позиционного управления продольным движением;
5 - блок интегрального управления продольным движением;
6 - блок управления приводом руля высоты (стабилизатора);
7 - привод руля высоты (стабилизатора);
8 - блок формирования сигналов управления движением крена;
9 - блок позиционного управления движением крена;
10 - блок формирования сигналов управления движением рыскания;
11 - блок позиционного управления движением рыскания;
12 - блок перекрестных связей между каналами крена и рыскания;
13 - блок управления приводами элеронов;
14, 15 - приводы элеронов;
16 - блок управления приводом руля направления;
17 - привод руля направления;
18 - блок оценки продольной устойчивости самолета;
19 - блок интегрального управления движением крена;
20 - блок компенсации возмущений по крену;
21 - блок интегрального управления движением рыскания.
В блоке 1 датчиков параметров движения самолета и перемещений рычагов управления формируются сигналы перегрузок по всем трем осям, угловых и линейных скоростей самолета, углов атаки и скольжения, тангажа, крена, рыскания, перемещений ручки управления (штурвала) по тангажу и крену, а также педалей. В блоке 2 происходит фильтрация сигналов датчиков, обеспечивающая подавление высокочастотных помех, аэроупругую устойчивость самолета с системой управления и формирование необходимых амплитуд и фаз сигналов прямых и обратных связей. Следует отметить, что в блоке 2 используются фильтры, имеющие в статике конечные, в частности нулевые, коэффициенты передачи. В блоке 3, состоящем из трех блоков, формируются сигналы управлением движением по тангажу. В блоке 4 позиционного управления продольным движением формируются комбинации фильтрованных сигналов отклонения рычага управления по тангажу, скорости тангажа, вертикальной перегрузки и угла атаки с соответствующими коэффициентами. В блоке 5 интегрального управления продольным движением формируются интегралы разностей между текущими значениями вертикальной перегрузки и угла атаки и их заданными значениями, определяемыми отклонением рычага управления по тангажу. В блоке 18 на основе оценки углового ускорения и скорости по тангажу, а также момента от органа управления производится оценка момента от приращения угла атаки, определяемого продольной устойчивостью самолета. Выходы блоков 4, 5, 18 соединены с входами блока 6 управления приводом руля высоты. Блок 8 формирования сигналов управления движением крена содержит 3 блока. В блоке 9 позиционного управления движением крена формируется комбинация фильтрованных сигналов угловых скоростей крена и рыскания, угла скольжения, отклонения рычага управления по крену с соответствующими коэффициентами. В блоке 19 интегрального управления движением крена формируется сигнал от разности между текущим значением угловой скорости крена и ее заданным значением, определяемым отклонением рычага управления по крену. В блоке 20 компенсации возмущений по крену на основе оценок углового ускорения по крену, моментов от угловой скорости крена, угла скольжения и отклонений элеронов определяется возмущающий момент по крену от срывных явлений при несимметричном обтекании самолета. Блок 10 формирования сигналов управления движением рыскания содержит 2 блока. В блоке 11 позиционного управления движением рыскания формируется комбинация фильтрованных сигналов угловой скорости рыскания, угла скольжения, боковой перегрузки отклонения педалей. В блоке 21 интегрального управления движением рыскания формируется интеграл от разности между текущим значением угла скольжения и его заданным значением, определяемым отклонением педалей. Сигналы с выходов блоков 9, 11, 19, 21 поступают на входы блока 12 перекрестных связей между каналами крена и рыскания, обеспечивающих координацию этих движений. Выходы блоков 9, 12, 19, 21 соединены с входом блока 13 управления приводами элеронов. Выходы блоков 11, 12, 21 соединены с входами блока 16 управления приводами руля направления. Введенные вновь по сравнению с прототипом блоки 18, 19, 20, 21 выполняют следующие функции. В блоке 18 оценивается момент тангажа, зависящий от приращения угла атаки и являющийся характеристикой продольной аэродинамической устойчивости самолета. Известно, что самолет с интегральным управлением по тангажу имеет тенденции к затягиванию переходных процессов при больших запасах продольной устойчивости и к большим забросам в переходных процессах по перегрузке и углу атаки при резких отклонениях рычага управления по тангажу, если запасы продольной устойчивости малы. Использование выходного сигнала блока 18 позволяет компенсировать отклонения от номинального значения запаса продольной устойчивости, для которого выбраны параметры системы управления. Тем самым обеспечиваются требуемые характеристики устойчивости и управляемости самолетов для всех их конфигураций и режимов полета. Блок 19 интегрального управления движением крена обеспечивает точное соответствие в статике между отклонением рычага управления по крену и угловой скоростью крена. Это позволяет:
- обеспечить заданные характеристики управляемости по крену;
- ограничить максимальную угловую скорость крена при максимальном отклонении рычага управления по крену;
- компенсировать моменты по крену, возникающие при несимметричном обтекании самолета на больших углах атаки и полете вблизи трансзвуковой зоны.
В блоке 20 компенсации возмущений по крену оцениваются моменты по крену, возникающие при срывных явлениях. Выходной сигнал этого блока поступает на вход блока управления приводами элеронов и позволяет с их помощью в значительной мере компенсировать возмущающие моменты. Блок 21 интегрального управления движением рыскания отслеживает в статике точное соответствие между отклонением педалей и углом скольжения. Это позволяет обеспечить:
- заданные характеристики управляемости по рысканию;
- ограничение угла скольжения при максимальном отклонении педалей;
- компенсацию момента рыскания, возникающего при больших углах атаки и в трансзвуковой области полета.
Работа системы управления осуществляется следующим образом: летчик отклоняет рычаг управления, например, по тангажу. Сигнал перемещения рычага управления поступает через блок фильтрации сигналов 2 в блок позиционного 4 и интегрального 5 управления продольным движением самолета и дальше через блок управления приводом руля высоты 6 поступает на вход соответствующего привода 7 и вызывает отклонение руля высоты. Начинающееся движение по тангажу фиксируется датчиками скорости тангажа, угла атаки и вертикальной перегрузки 1, сигналы которых через соответствующие блоки поступают на привод руля высоты. Движение происходит до тех пор, пока контролируемый летчиком параметр движения не достигнет значения, заданного отклонением рычага управления. Обычно на малых скоростях полета контролируемый параметр - угол атаки, на средних и больших скоростях - вертикальная перегрузка. Аналогичным образом осуществляется управление по крену и рысканию.
Система была изготовлена на предприятии МИЭиА и испытана на самолете Як-130УБС. Указанный в заявке технический результат по улучшению характеристик устойчивости и управляемости самолета был подтвержден в процессе летных испытаний.
Система управления самолетом, включающая блок датчиков параметров движения самолета и перемещений рычагов управления, блок фильтрации сигналов датчиков, блок формирования сигналов управления продольным движением самолета, содержащий блок позиционного управления продольным движением и блок интегрального управления продольным движением, блок управления приводом руля высоты, блок формирования сигналов управления движением крена, содержащий блок позиционного управления движением крена, блок формирования сигналов управления движением рыскания, содержащий блок позиционного управления движением рыскания, а также блок перекрестных связей между каналами крена и рыскания, блок управления приводами элеронов, блок управления приводом руля направления, приводы руля высоты, элеронов и руля направления, причем входы блоков позиционного управления продольным движением, интегрального управления продольным движением, позиционного управления движением крена и позиционного управления движением рыскания соединены с выходами блока фильтрации сигналов датчиков, выходы блоков позиционного управления продольным движением и интегрального управления продольным движением соединены с входом блока управления приводом руля высоты, выход блока позиционного управления движением крена соединен с входом блока управления приводами элеронов и с входом блока перекрестных связей между каналами крена и рыскания, выход блока позиционного управления движением рыскания соединен с входами блоков перекрестных связей между каналами крена и рыскания и блоком управления приводом руля направления, отличающаяся тем, что в блок формирования сигналов управления продольным движением введен блок оценки продольной устойчивости самолета, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход соединен с входом блока управления приводом руля высоты, в блок формирования сигналов управления движением крена введены блок интегрального управления движением крена, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход с входами блока управления приводами элеронов и блока перекрестных связей между каналами крена и рыскания, а также введен блок компенсации возмущений по крену, вход которого соединен с блоком фильтрации сигналов датчиков, а выход с входом блока управления приводами элеронов, в блок формирования сигналов управления движением рыскания введен блок интегрального управления движением рыскания, вход которого соединен с выходом блока фильтрации сигналов датчиков, а выход соединен с входом блока управления приводом руля направления и с входом блока перекрестных связей между каналами крена и рыскания.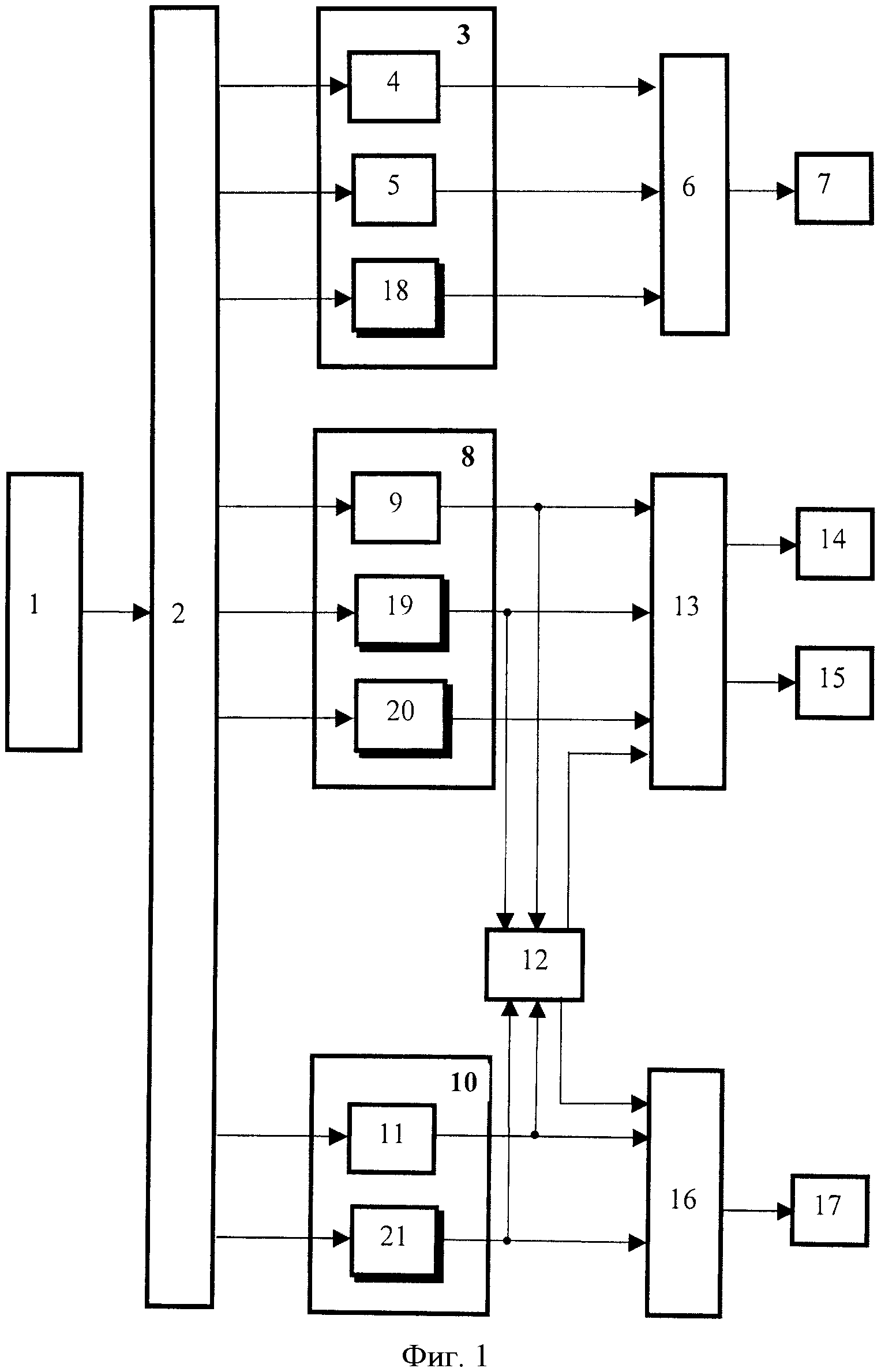
Гиперзвуковой прямоточный воздушно-реактивный двигатель и способ организации горения
Способ поверки датчика силы и устройство для его осуществления
Способ разработки метангидратов и устройство для его реализации
Способ организации детонационного режима горения в камере сгорания гиперзвукового прямоточного воздушно-реактивного двигателя
Аэродинамическая труба
Осесимметричное сопло ракетного двигателя
Система очистки воздуха
Комбинированная противооблединительная система
Устройство для повышения несущих свойств летательного аппарата
Способ нагружения сжатым воздухом фюзеляжа летательного аппарата при испытаниях на выносливость
Гиперзвуковой прямоточный воздушно-реактивный двигатель и способ организации горения
Способ поверки датчика силы и устройство для его осуществления
Способ разработки метангидратов и устройство для его реализации
Способ организации детонационного режима горения в камере сгорания гиперзвукового прямоточного воздушно-реактивного двигателя
Аэродинамическая труба
Осесимметричное сопло ракетного двигателя
Система очистки воздуха
Комбинированная противооблединительная система
Устройство для повышения несущих свойств летательного аппарата
Способ нагружения сжатым воздухом фюзеляжа летательного аппарата при испытаниях на выносливость

