Результат интеллектуальной деятельности: АДАПТИВНОЕ ТРЕХПАЛОЕ ЗАХВАТНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Представленное изобретение относится к области робототехники и может быть использовано при создании роботов-манипуляторов для работы с объектами с заранее неизвестной «неправильной» формой и неизвестными жесткостными и прочностными характеристиками.
В настоящее время известно большое количество многопальцевых захватных устройств (ЗУ), предназначенных для захвата различных видов объектов заданной формы. Основным функциональным недостатком данных устройств является их неприспособленность к схватыванию объектов с заранее неизвестной формой.
Наиболее близким техническим решением к предлагаемому изобретению, выбранному авторами в качестве прототипа, является ЗУ по патенту WO 2004/028753, содержащее корпус с установленными на нем тремя пальцами. Каждый палец имеет две фаланги, каждая из которых приводится в движение своим индивидуальным приводом. Один палец жестко установлен на корпусе и не может изменять своей ориентации относительно корпуса. Каждый из двух других пальцев установлен на своем поворотном рычаге. Поворотные рычаги установлены на корпусе так, что могут синхронно поворачиваться относительно корпуса вокруг перпендикулярных корпусу осей с одного привода поворотов пальцев, выходная шестерня которого через систему зубчатых колес жестко связана с зубчатыми колесами на поворотных рычагах. Таким образом, пальцы могут поворачиваться только синхронно и на одинаковые углы. При этом оси поворотов фаланг пальцев могут быть параллельными в двух крайних положениях поворотных рычагов. В одном крайнем положении пальцы располагаются параллельно друг другу, а в другом крайнем положении при повороте рычагов на 180 пальцы располагаются по схеме два против одного. В любом промежуточном положении рычагов оси поворотов фаланг составляют равнобедренные треугольники различной конфигурации в зависимости от угла поворота привода.
Основным недостатком прототипа является, обусловленное поворотом через систему зубчатых колес обоих подвижных пальцев одним приводом, равенство углов поворота контактных плоскостей фаланг подвижных пальцев относительно контактных плоскостей неподвижного пальца, что благоприятно для захвата симметричных объектов и существенно затрудняет захват несимметричных объектов, т.к. могут возникать контактные усилия, неперпендикулярные осям подвижности фаланг, которые порождают «выламывающие моменты», приложенные к шарнирам фаланг. Возникающая при этом несбалансированная система контактных сил может привести к выдавливанию объекта из схвата или даже разрушению пальцев при значительных рабочих моментах в приводах фаланг.
Цель изобретения - придание захватному устройству свойства адаптивности при работе с объектами произвольной формы, т.е. способности ЗУ выстроить такую конфигурацию пальцев перед непосредственным схватыванием объекта путем сгибания фаланг пальцев, которая будет наилучшим образом отвечать форме объекта, а также упрощение конструкции ЗУ и повышение информативности измерений контактных усилий для работы с объектами с разной жесткостью и прочностью.
Технический результат достигается тем, что каждый из противостоящих пальцев поворачивается относительно корпуса с помощью индивидуального поворотного привода на угол не менее 90°, а сам корпус с пальцами поворачивается относительно элемента крепления ЗУ к манипулятору, что позволит согласовать плоскости контактных поверхностей фаланг с формой захватываемого объекта и исключит возникновение «выламывающих моментов», т.к. контактные усилия будут создавать моменты только вокруг рабочих осей приводов фаланг. В то же время применение сервоприводов с моментным очувствлением, а также расположение тактильных датчиков на контактных поверхностях фаланг позволит измерить непосредственно силы сжатия объекта каждой фалангой каждого пальца напрямую.
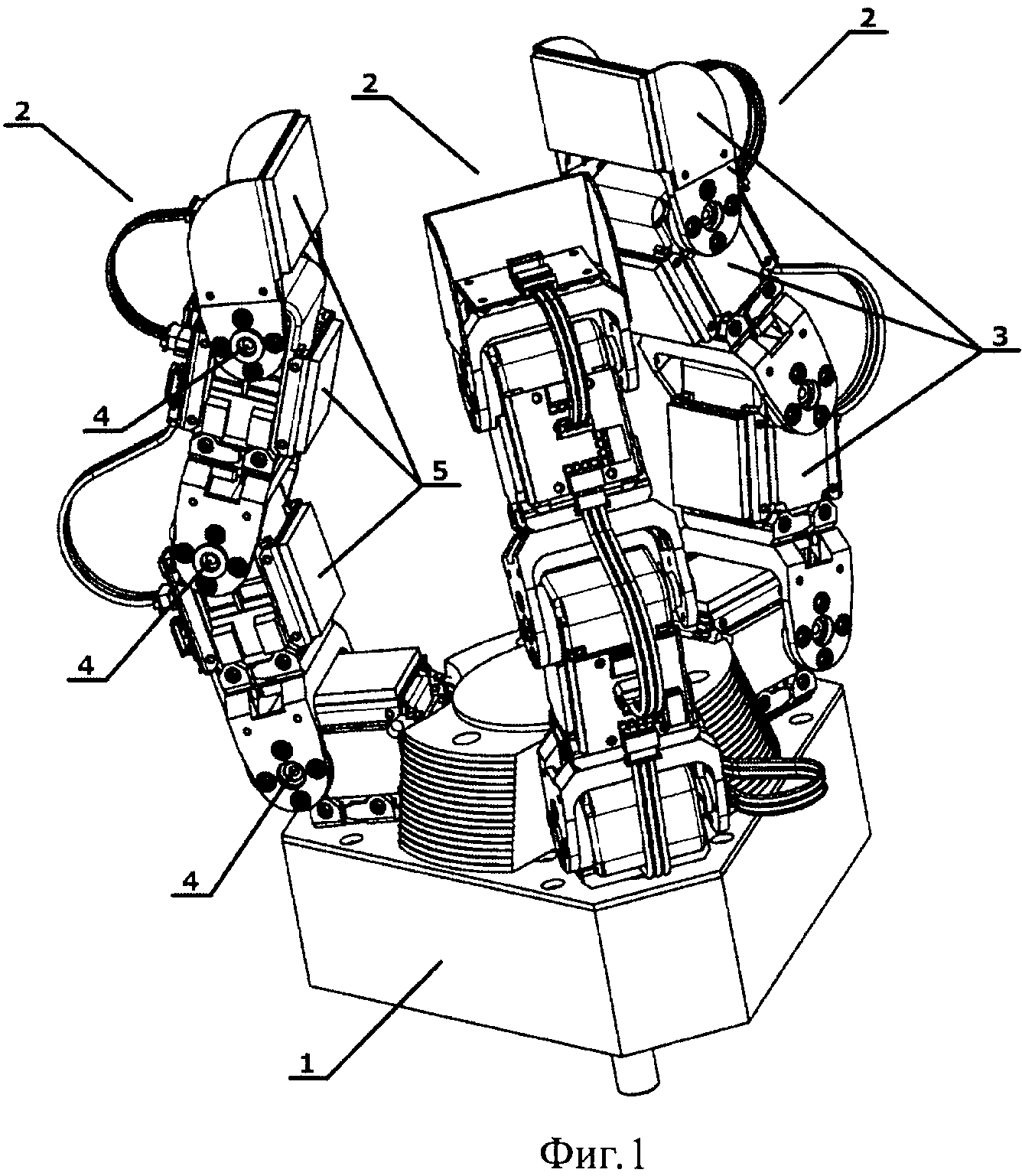
Схема ЗУ показана на фиг.1.
Захватное устройство имеет три пальца 2, сочлененных с корпусом 1. Каждый палец 2 состоит из трех фаланг 3, которые могут поворачиваться относительно друг друга с помощью индивидуальных поворотных сервоприводов 4 с параллельными осями вращения. Каждая из фаланг имеет контактную площадку 5, оснащенную тактильными датчиками.
Схема корпуса ЗУ показана на фиг.2.
В корпусе 1 расположены приводы поворота пальцев 6, которые могут поворачивать пальцы 2 вокруг осей 7, перпендикулярных плоскости установки пальцев и осям поворота фаланг. В корпусе также установлен поворотный привод 8, предназначенный для поворота захватного устройства относительно конструктивного элемента 9, с помощью которого ЗУ крепится к манипулятору.
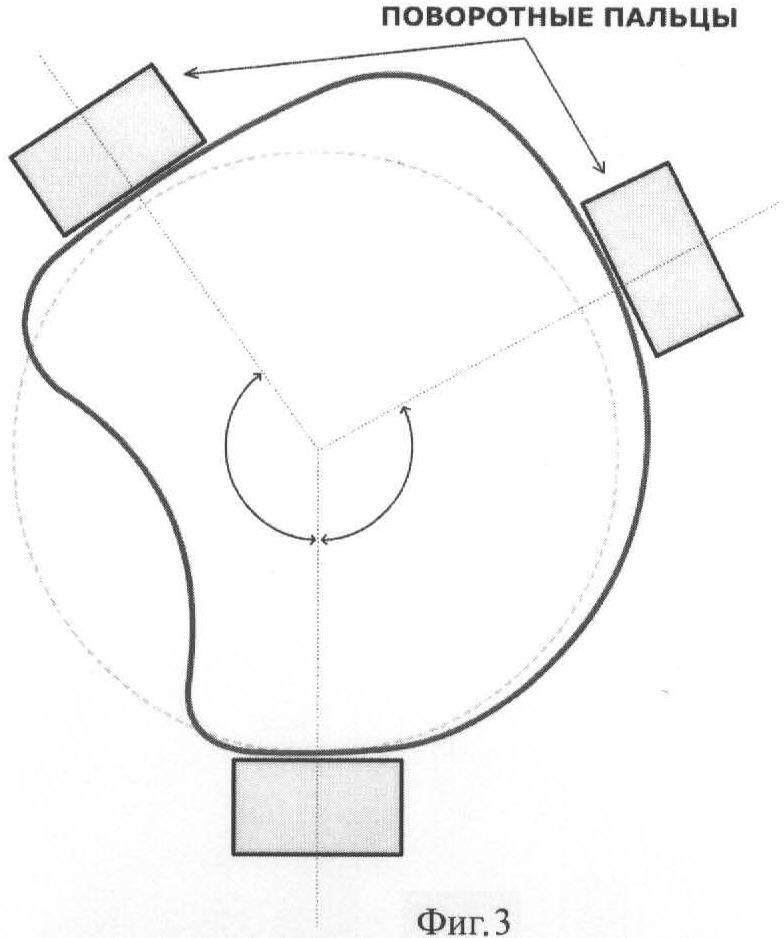
На фиг.3 условно показаны сечение захваченного объекта «неправильной» формы внутри схвата и разные углы ориентации поворотных пальцев при адаптации их к форме объекта.
Захватное устройство работает следующим образом.
При схватывании объекта противостоящие пальцы 2, с помощью индивидуальных поворотных приводов 6, поворачиваются на углы, обеспечивающие оптимальный захват объекта, в том числе несимметричной формы, как показано на фиг.3. Поворотные приводы фаланг 4 обеспечивают сжатие и удержание объекта схватывания, посредством поворота фаланг 3 каждого из пальцев 2 относительно друг друга и относительно корпуса 1. Тактильные датчики, расположенные на контактных площадках 5 фаланг, производят измерения силы сжатия объекта каждой из фаланг, что позволяет контролировать и регулировать силу сжатия объекта.
Адаптивное трехпалое захватное устройство, включающее корпус с установленными на нем тремя пальцами, расположенными в вершинах равнобедренного или равностороннего треугольника, каждый палец состоит из трех фаланг, первая из которых поворачивается относительно корпуса, а вторая и третья фаланги поворачиваются относительно первой и второй соответственно с помощью индивидуальных поворотных приводов с параллельными осями вращений, причем два пальца могут быть выполнены с возможностью поворота вокруг оси, перпендикулярной плоскости установки пальцев и перпендикулярной осям поворота фаланг, отличающееся тем, что каждый из пальцев выполнен с возможностью поворота относительно корпуса на угол не менее 90° с помощью индивидуального привода, при этом в корпусе установлен поворотный привод, поворачивающий корпус с пальцами относительно конструктивного элемента корпуса, с помощью которого захватное устройство крепится к манипулятору, в качестве индивидуальных приводов используются сервоприводы с встроенным моментным очувствлением, а контактные поверхности фаланг оснащены тактильными датчиками.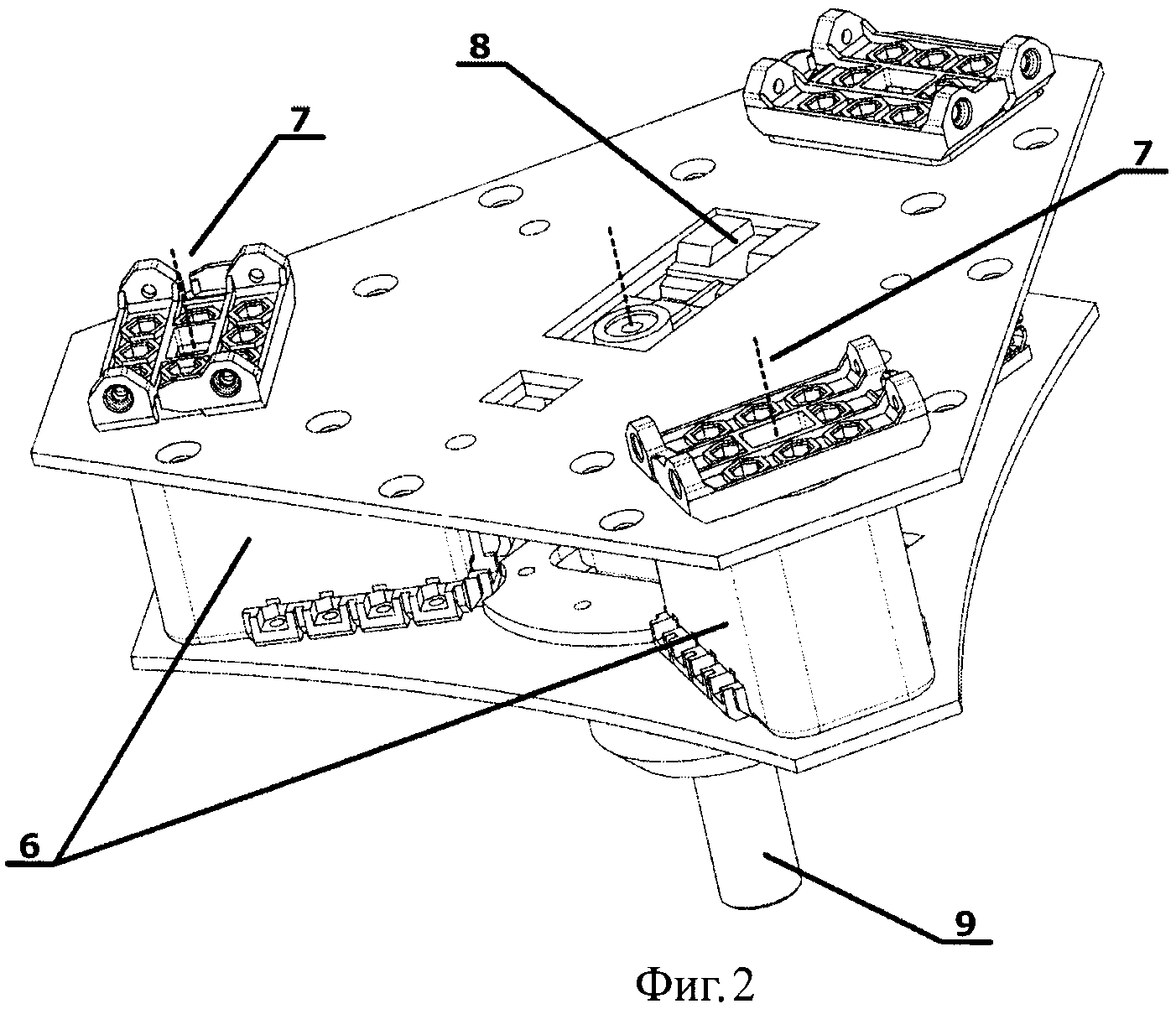
Устройство для испытания мобильных роботов
Система импульсной лазерной локации
Устройство для измерения плотности потока нейтронов ядерной энергетической установки в условиях фоновой помехи от гамма-квантов и высокоэнергетичных космических электронов и протонов
Робототехническая система сервисного космического аппарата с силомоментной обратной связью
Многоканальное устройство для измерения временных интервалов
Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее
Способ струйного электролитно-плазменного полирования металлических изделий сложного профиля и устройство для его реализации
Система импульсной лазерной локации
Способ индикации механических резонансов по фотографиям следов флуоресцирующих маркеров
Способ поиска и определения координат источников гамма-излучения
Устройство для испытания мобильных роботов
Система импульсной лазерной локации
Устройство для измерения плотности потока нейтронов ядерной энергетической установки в условиях фоновой помехи от гамма-квантов и высокоэнергетичных космических электронов и протонов
Робототехническая система сервисного космического аппарата с силомоментной обратной связью
Многоканальное устройство для измерения временных интервалов
Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее
Способ струйного электролитно-плазменного полирования металлических изделий сложного профиля и устройство для его реализации
Кантилевер для сканирующего зондового микроскопа

