Результат интеллектуальной деятельности: УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к устройству преобразования мощности, которое допускает перезапуск вращающейся машины переменного тока или машины вращения переменного тока без использования детектора скорости, а более конкретно к устройству преобразования мощности, которое перезапускает вращающуюся машину переменного тока, которая находится в состоянии свободного вращения (холостого хода) с переменным током на выходе устройства преобразования мощности, прерываемым посредством прерывания обслуживания или т.п., в процессе от движения по инерции до перезапуска или в ходе работы.
Предшествующий уровень техники
Когда вращающаяся машина переменного тока в состоянии холостого хода, не возбужденная посредством устройства преобразования мощности, перезапускается, частота, фаза и амплитуда выходного напряжения, поданного из устройства преобразования мощности, должны принудительно совпадать с частотой вращения, фазой остаточного напряжения и амплитудой вращающейся машины переменного тока в состоянии холостого хода. Если фазы и амплитуды напряжения отличаются, протекает большой ток в устройство преобразования мощности. Если частоты отличаются, возникает внезапный крутящий момент во вращающейся машине переменного тока.
В качестве средства для решения такой проблемы в предшествующем уровне техники, описанном в патентном документе 1 Японская выложенная патентная заявка № 2002-374699, предоставляется модуль коррекции значений оценки магнитного потока, который корректирует повышение значения оценки магнитного потока в процессе от движения по инерции до перезапуска транспортного средства с электродвигателем, между модулем модели электродвигателя асинхронной машины, который вычисляет значение оценки магнитного потока, и модулем оценки тока электродвигателя, который принимает ввод значения оценки магнитного потока из модуля модели электродвигателя асинхронной машины и вычисляет значение оценки тока. Следовательно, нестабильность при перезапуске вращающейся машины переменного тока, которая находится в состоянии холостого хода, уменьшается.
Краткое описание существа изобретения
Тем не менее, в предшествующем уровне техники, описанном в патентном документе 1, соответствующие значения, вычисленные из команды управления магнитным потоком и т.п., задаются как значение оценки первичного и вторичного магнитного потока d-оси. Следовательно, возникает проблема в том, что когда значение оценки скорости немного падает во время перезапуска, напряжение на стороне постоянного тока повышается в некоторых случаях. В предшествующем уровне техники, описанном в патентном документе 1, не описывается неразрывность, реализованная с использованием двух средств оценки скорости.
Настоящее изобретение разработано с учетом вышеизложенного. Задача настоящего изобретения заключается в том, чтобы получать устройство преобразования мощности, которое дополнительно может уменьшать, без использования детектора вращения, ударный крутящий момент при перезапуске вращающейся машины переменного тока, которая находится в состоянии холостого хода.
Чтобы разрешать вышеуказанные проблемы и решить вышеуказанную задачу, устройство преобразования мощности содержит: преобразователь мощности, который преобразует напряжение постоянного тока в напряжение переменного тока и прикладывает напряжение переменного тока к вращающейся машине переменного тока; и модуль управления, который управляет преобразователем мощности на основе управляющей команды извне, первый модуль вычисления, который вычисляет и выводит, из информации тока, детектируемой посредством вращающейся машины переменного тока, и значения команды управления током на основе управляющей команды, значение первой команды управления напряжением в преобразователь мощности, магнитный поток вращающейся машины переменного тока и первую скорость, которая является скоростью холостого хода вращающейся машины переменного тока; второй модуль вычисления, который задает, в качестве начального значения, по меньшей мере, одно из первой скорости и магнитного потока вращающейся машины переменного тока, вводимых из первого модуля вычисления, и вычисляет и выводит значение второй команды управления напряжением в преобразователь мощности и вторую скорость, которая является скоростью возбуждения вращающейся машины переменного тока.
Согласно настоящему изобретению, независимо от того, останавливается вращающаяся машина переменного тока или выполняет свободное вращение, значение команды управления напряжением определяется согласно сигналу режима управления, и команда управления напряжением переключается согласно результату определения. Следовательно, обеспечивается преимущество в том, что можно реализовывать дополнительное уменьшение ударного крутящего момента при перезапуске вращающейся машины переменного тока, которая находится в состоянии холостого хода.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительного варианта воплощения со ссылками на сопроводительные чертежи, на которых:
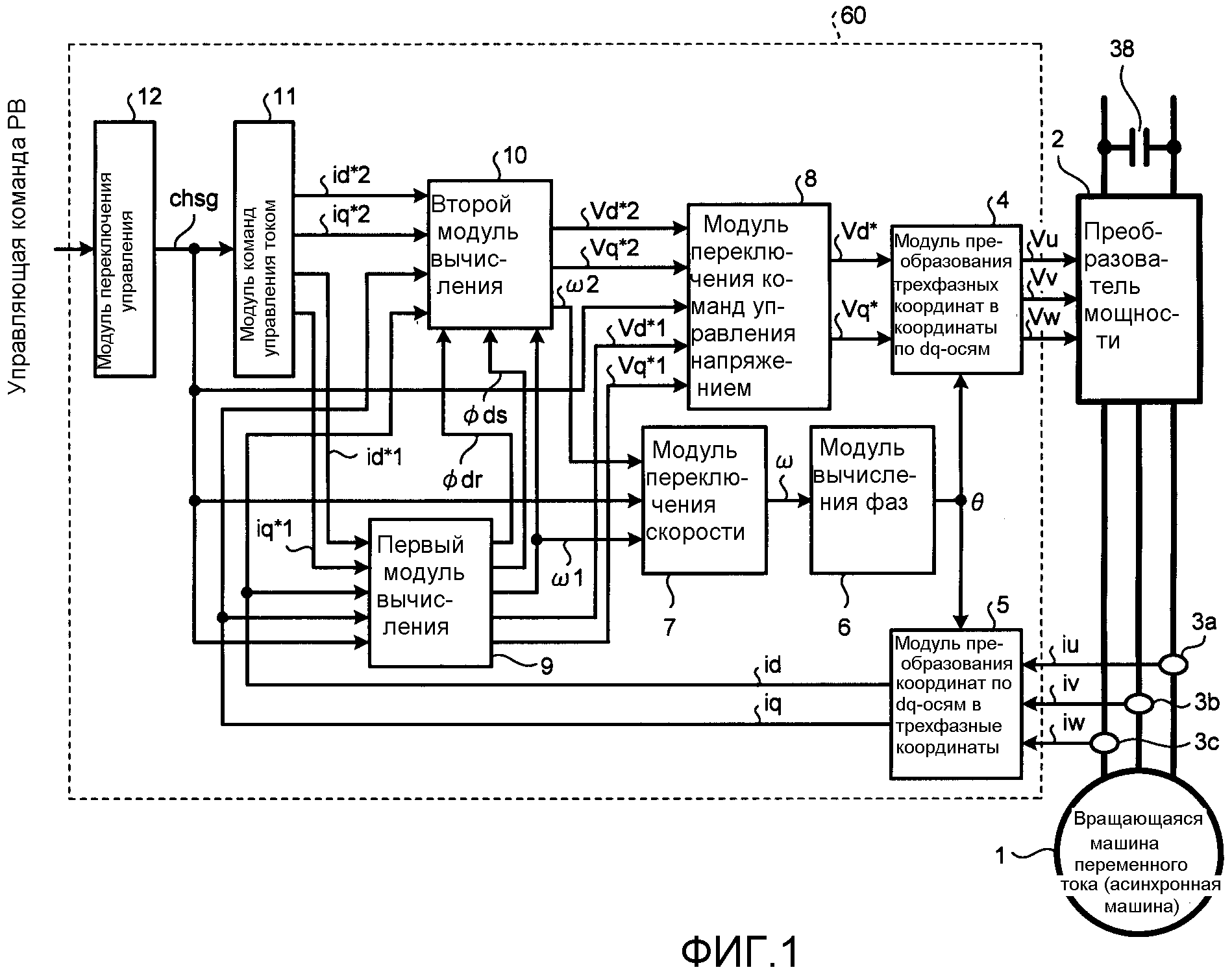
Фиг.1 изображает блок-схему примера конфигурации устройства преобразования мощности согласно первому варианту осуществления;
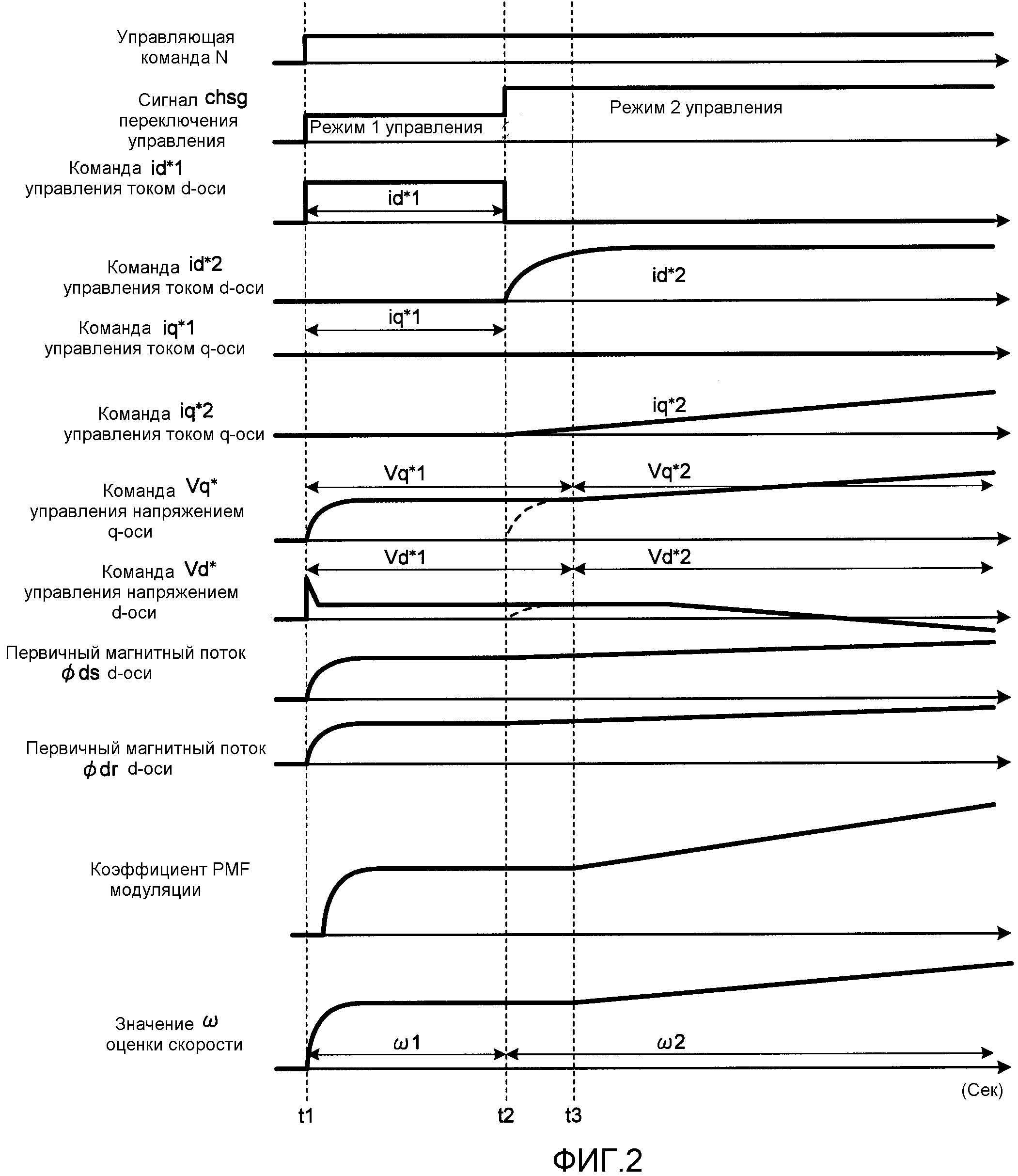
Фиг.2 изображает временную диаграмму для пояснения операций сигналов с использованием устройства преобразования мощности согласно первому варианту осуществления;
Фиг.3 изображает блок-схему конфигурации первого модуля вычисления;
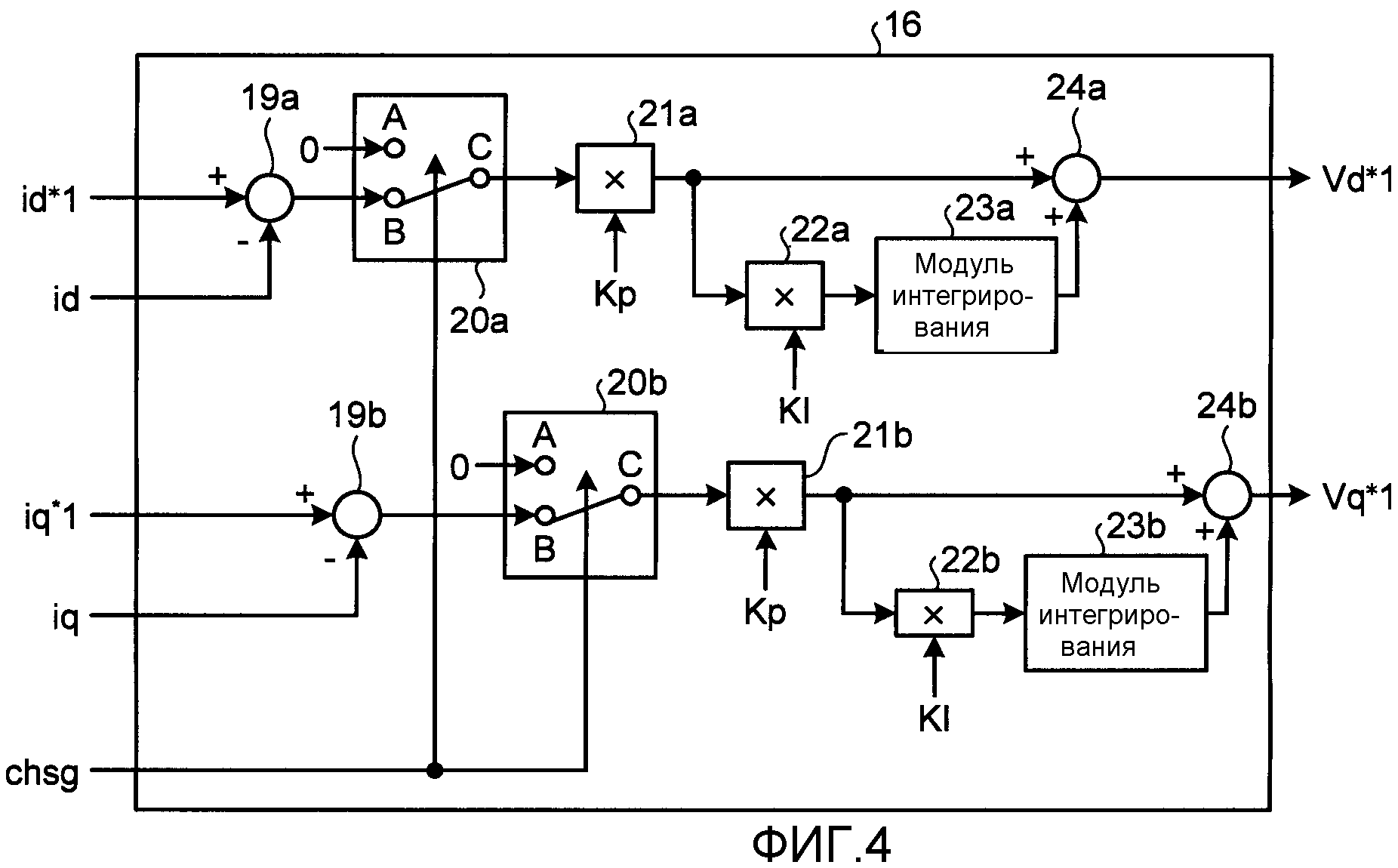
Фиг.4 изображает блок-схему конфигурации модуля управления по току;
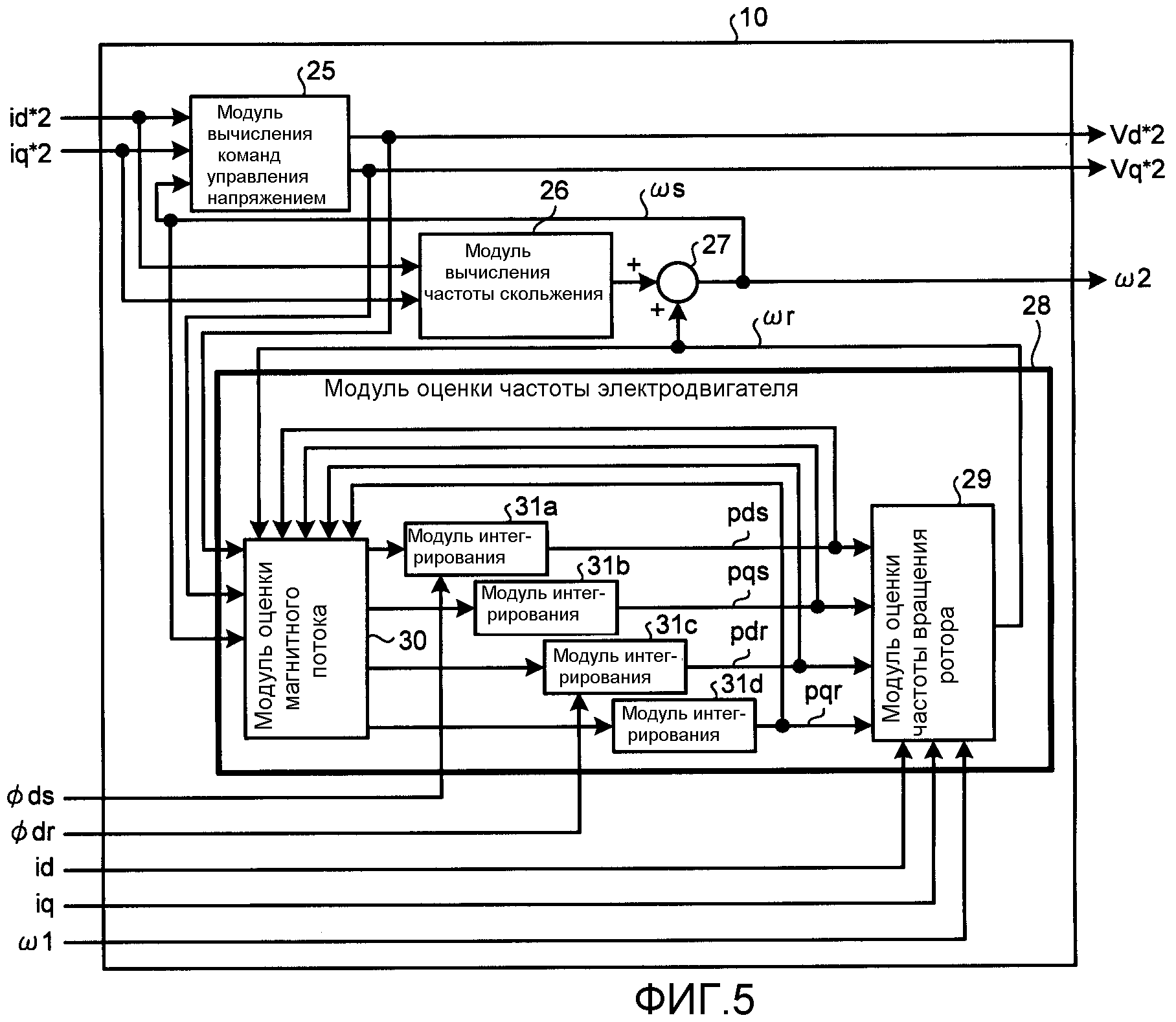
Фиг.5 изображает блок-схему конфигурации второго модуля вычисления;
Фиг.6 изображает блок-схему конфигурации модуля переключения команд управления напряжением;
Фиг.7 изображает блок-схему конфигурации модуля переключения скорости;
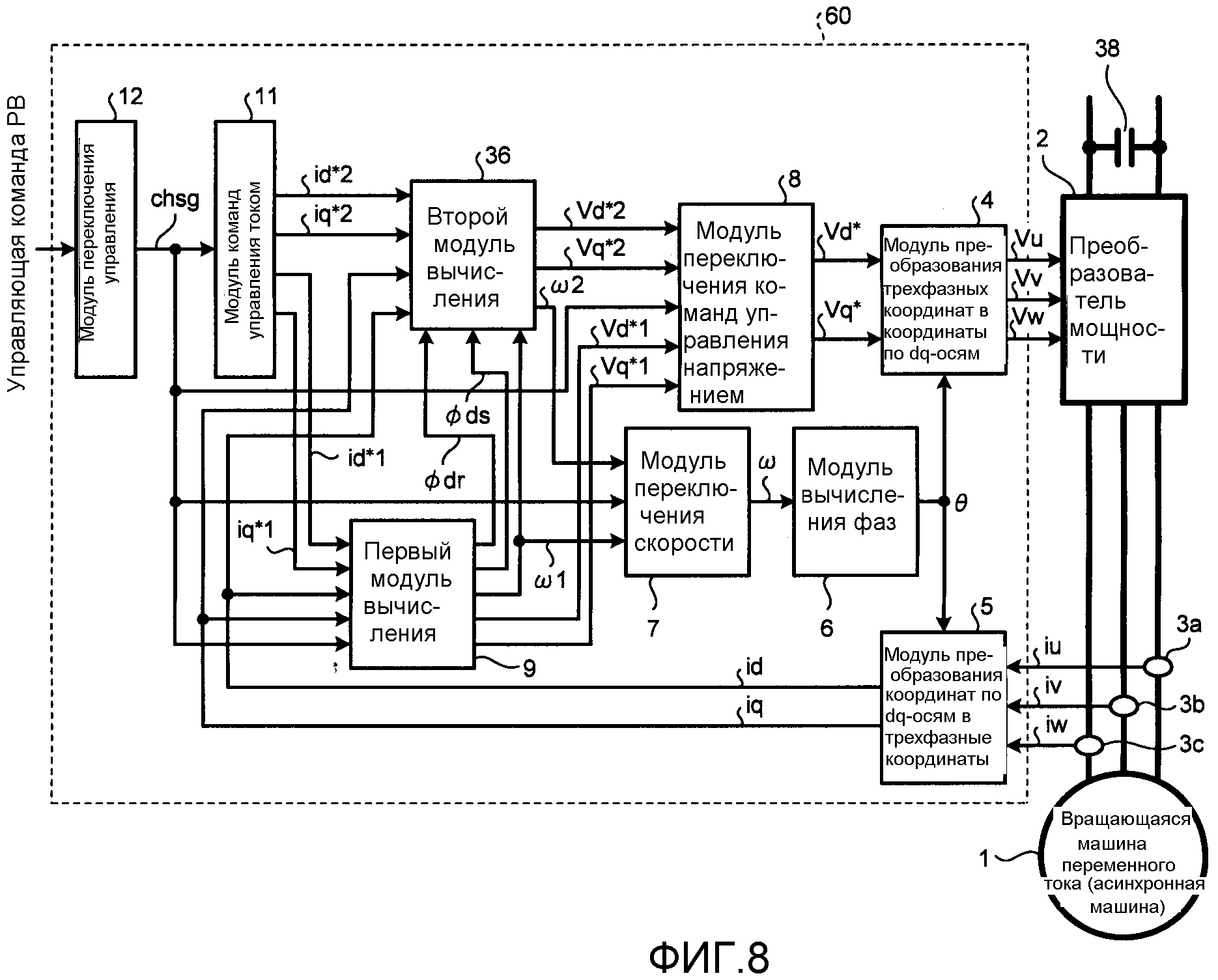
Фиг.8 изображает схему примера конфигурации устройства преобразования мощности согласно второму варианту осуществления;
Фиг.9 изображает схему примера конфигурации второго модуля вычисления согласно второму варианту осуществления;
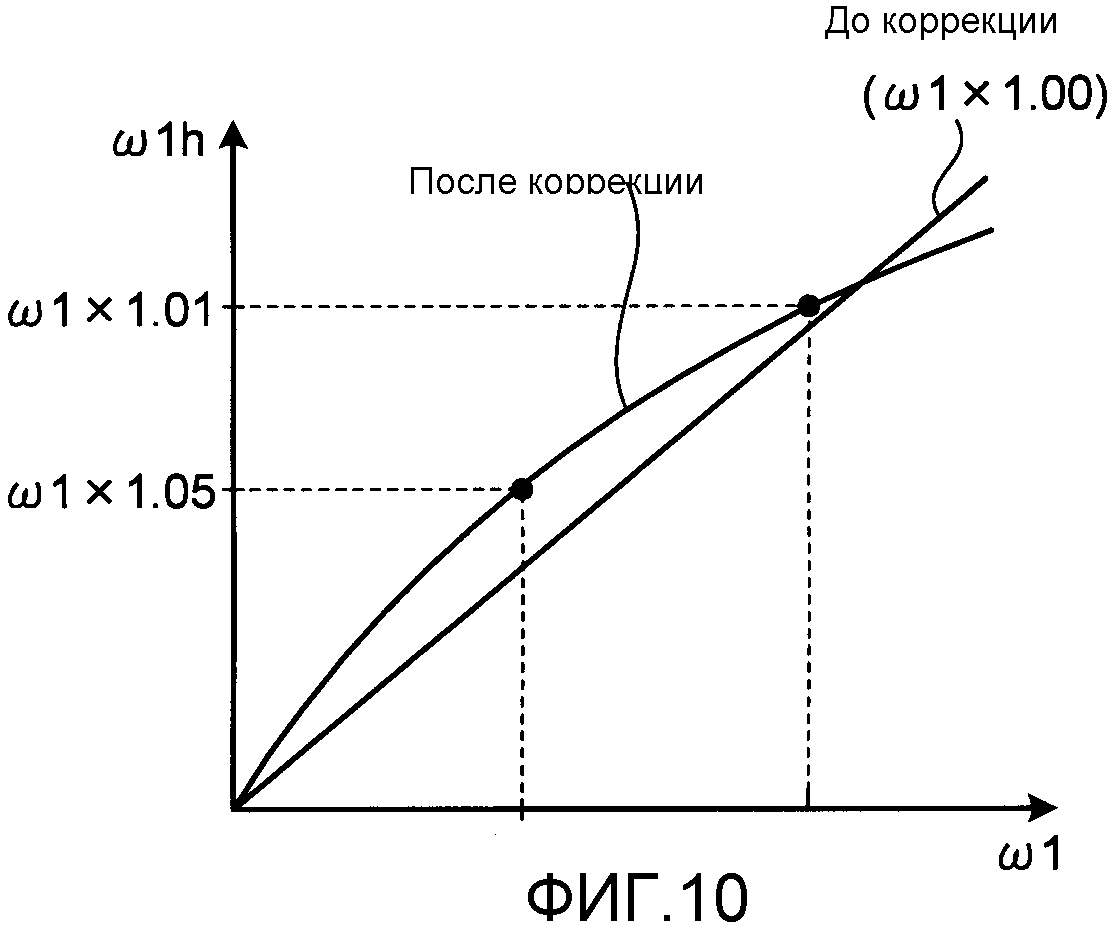
Фиг.10 изображает диаграмму для пояснения работы модуля коррекции скорости.
Описание предпочтительных вариантов осуществления изобретения
Варианты осуществления устройства преобразования мощности согласно настоящему изобретению подробно поясняются ниже со ссылками на чертежи. Настоящее изобретение не ограничено этими вариантами осуществления.
Первый вариант осуществления
Фиг.1 изображает блок-схему примера конфигурации устройства преобразования мощности согласно первому варианту осуществления. Фиг.2 изображает временную диаграмму для пояснения операций сигналов посредством устройства преобразования мощности согласно первому варианту осуществления. На фиг.1 устройство преобразования мощности включает в себя, в качестве основных компонентов, модуль 12 переключения управления, выступающий в качестве модуля 60 управления, модуль 11 команд управления током, первый модуль 9 вычисления, второй модуль 10 вычисления, модуль 7 переключения скорости, модуль 8 переключения команд управления напряжением, модуль 6 вычисления фаз, модуль 4 преобразования трехфазных координат в координаты по dq-осям, модуль 5 преобразования координат по dq-осям в трехфазные координаты и преобразователь 2 мощности.
Асинхронная машина 1, которая является вращающейся машиной переменного тока, подключается к преобразователю 2 мощности, который преобразует постоянный ток в переменный ток, имеющий произвольную частоту. Преобразователь 2 мощности прикладывает трехфазные напряжения к асинхронной машине 1. Модули 3a, 3b и 3c детектирования тока на стороне переменного тока детектируют фазные токи iu, iv и iw трех фаз, сгенерированные в асинхронной машине 1. Фазные токи iu, iv и iw подаются в модуль 5 преобразования координат по dq-осям в трехфазные координаты.
На фиг.1 трансформаторы тока (CT) и т.п., выступающие в качестве модулей 3a, 3b и 3c детектирования тока на стороне переменного тока, описываются для трех проводов, которые соединяют преобразователь 2 мощности и асинхронную машину 1. Тем не менее, фазные токи могут детектироваться с использованием других общеизвестных способов. Поскольку соотношение iu+iv+iw=0 истинно, например, если CT размещаются на двух проводах u-фазы и v-фазы, фазный ток iw w-фазы может быть вычислен из токов детектирования для двух фаз u и v. Следовательно, модуль детектирования тока 3c w-фазы может опускаться.
В устройстве преобразования мощности, согласно этому варианту осуществления, в качестве примера, преимущество устройства преобразования мощности поясняется в качестве варианта осуществления, в котором вращающаяся машина переменного тока управляется в качестве асинхронной машины 1. Тем не менее, само собой разумеется, что идентичное преимущество может ожидаться, даже если асинхронная машина 1 является синхронной машиной. Также можно применять устройство преобразования электродвигателя согласно этому варианту осуществления в качестве устройства преобразования мощности, которое управляет, чтобы возбуждать электромагнитный привод, к примеру, линейный асинхронный двигатель, линейный синхронный двигатель или соленоид, помимо вращающейся машины переменного тока.
Общеизвестно, что когда трехфазные напряжения или трехфазные токи подвергаются координатному преобразованию по двум ортогональным вращающимся осям, необходима ось координат управления. Фаза оси координат управления, которая является двухосной координатой вращения, задается равной 0 на основе предварительно определенной угловой частоты ω. Фаза 6 является значением, полученным посредством интегрирования предварительно определенной угловой частоты ω с помощью модуля 6 вычисления фаз. Модуль 6 вычисления фаз интегрирует предварительно определенную угловую частоту ω и выводит интегрированную угловую частоту ω в модуль 4 преобразования трехфазных координат в координаты по dq-осям и модуль 5 преобразования координат по dq-осям в трехфазные координаты в качестве фазы 0.
Модуль 5 преобразования координат по dq-осям в трехфазные координаты преобразует, на основе фазы 0, вводимой из модуля 6 вычисления фаз, фазные токи iu, iv и iw, полученные из модулей 3a, 3b и 3c детектирования тока, в значение id детектирования тока d-оси и значение iq детектирования тока q-оси, которые являются информацией тока. Модуль 5 преобразования координат по dq-осям в трехфазные координаты выводит значение id детектирования тока d-оси и значение iq детектирования тока q-оси соответственно в первый модуль 9 вычисления и второй модуль 10 вычисления.
Когда устройство преобразования мощности, согласно этому варианту осуществления, устанавливается, например, на электропоезде, управляющая команда PB, которая означает команду P подачи питания, указывающую ускорение, команда метки, указывающая команду B торможения, и т.п., вводятся из кабины управления в модуль 12 переключения управления. Модуль 12 переключения управления формирует сигнал chsg режима управления согласно вводу управляющей команды PB.
Когда управляющая команда PB вводится извне, сначала модуль 12 переключения управления задает сигнал chsg режима управления в качестве сигнала режима 1 управления, который является первым управляющим сигналом. Затем, когда предварительно определенное время истекает после того, как вводится управляющая команда PB, модуль 12 переключения управления задает сигнал chsg режима управления в качестве сигнала режима 2 управления, который является вторым управляющим сигналом. Сигнал режима 1 управления выступает в качестве запуска начала оценки скорости асинхронной машины 1. Сигнал режима 2 управления выступает в качестве сигнала для переключения управления вместо сигнала режима 1 управления.
Предварительно определенное время задается как время, необходимое и достаточное для точного вычисления скорости ω1 свободного хода (в дальнейшем называемой "угловой частотой") асинхронной машины 1, которая является первой скоростью, с учетом характеристики времени работы первого модуля 9 вычисления. В этом варианте осуществления время сигнала режима 1 управления является временем меньше 0,1 секунды после того, как вводится управляющая команда PB. Следовательно, обеспечивается преимущество в том, что водитель не беспокоится насчет задержки в операциях ускорения и замедления преобразователя 2 мощности и асинхронной машины 1 после ввода управляющей команды PB. Например, если это время является значительным, водитель испытывает чувство дискомфорта, поскольку преобразователь 2 мощности и асинхронная машина 1 не ускоряются быстро, даже если вводится команда P подачи мощности. Тем не менее, если режим 1 управления задан коротким, такое чувство дискомфорта водителя может исключаться.
Сигнал chsg режима управления, выводимый из модуля 12 переключения управления, вводится в каждый из модуля 11 команд управления током, модуля 8 переключения команд управления напряжением, модуля 7 переключения скорости и первого модуля 9 вычисления. Модуль 11 команд управления током формирует команду id*1 управления током оси магнитного потока (в дальнейшем называемую "командой управления током d-оси") и команду id*1 управления током оси крутящего момента (в дальнейшем называемую "командой управления током q-оси"), которые являются значениями команд управления током, соответствующими асинхронной машине 1, и выводит команду id*1 управления током оси магнитного потока и команду id*1 управления током оси крутящего момента синхронно с сигналом режима 1 управления. Модуль 11 команд управления током формирует команду id*2 управления током оси магнитного потока и команду iq*2 управления током оси крутящего момента и выводит команду id*2 управления током оси магнитного потока и команду управления током оси крутящего момента id*2 синхронно с сигналом режима 2 управления.
На фиг.2, в качестве команды id*1 управления током d-оси, выводится предварительно определенное значение, когда сигнал chsg режима управления находится в режиме 1 управления. Команда id*1 управления током d-оси изменяется на нулевое значение, когда сигнал chsg режима управления изменяется на режим 2 управления. Другими словами, предварительно определенное значение выводится в режиме 1 управления и, иначе, выводится нуль. В качестве команды id*1 управления током q-оси нуль выводится независимо от режимов 1 и 2 управления.
Команда id*2 управления током d-оси является нулем, когда сигнал chsg режима управления находится в режиме 1 управления. Предварительно определенное значение выводится, когда сигнал chsg режима управления изменяется на режим 2 управления. Аналогично команде id*2 управления током d-оси, команда iq*2 управления током q-оси является нулем, когда сигнал chsg режима управления находится в режиме 1 управления. Предварительно определенное значение выводится, когда сигнал chsg режима управления изменяется на режим 2 управления.
Первый модуль вычисления
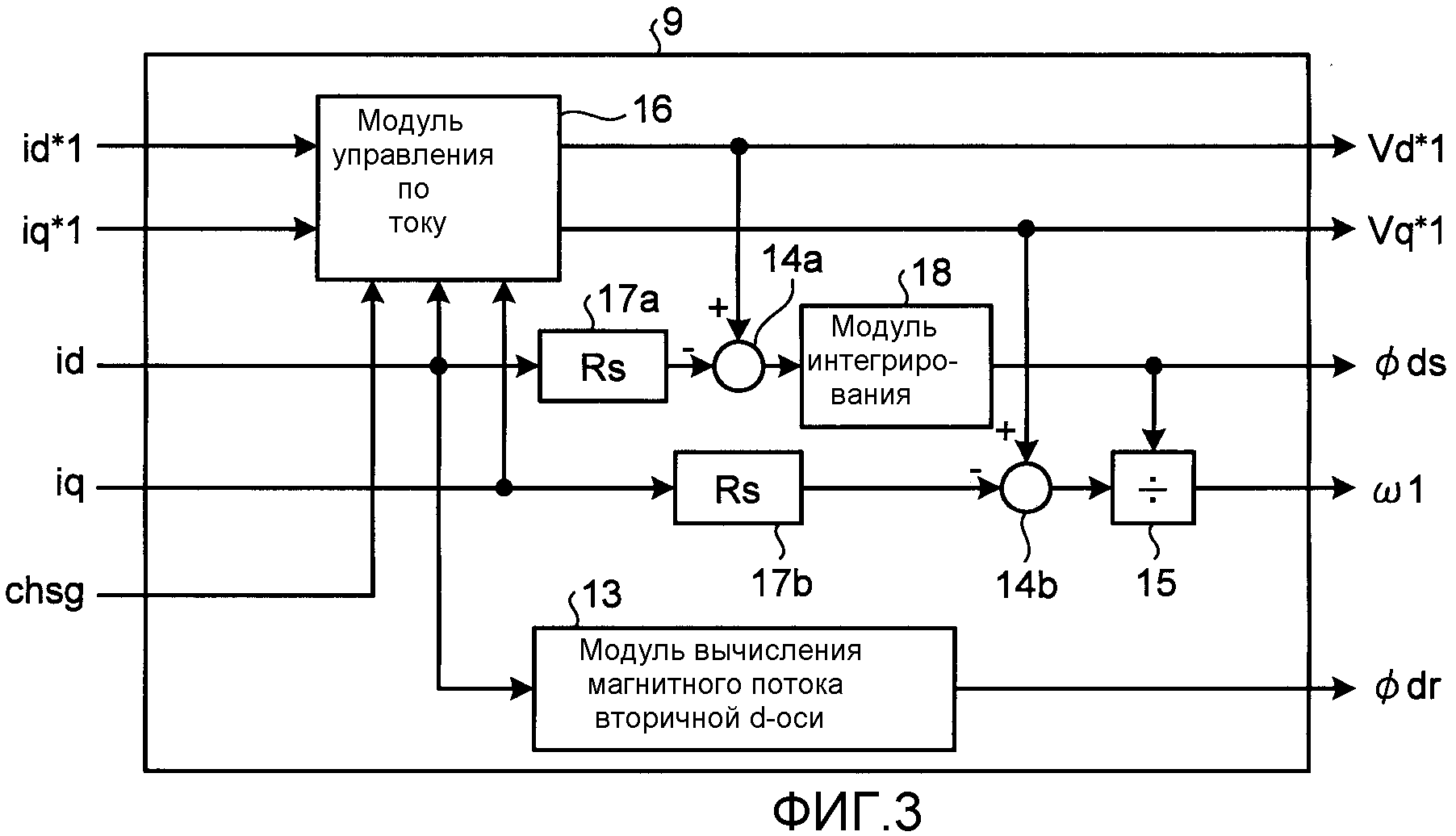
Фиг.3 является блок-схемой конфигурации первого модуля 9 вычисления. Первый модуль 9 вычисления включает в себя, в качестве основных компонентов, модуль 16 управления по току, модуль 13 вычисления вторичного магнитного потока d-оси, усиление 17a и 17b сопротивления (умножители), модули 14a и 14b вычитания, модуль 18 интегрирования и делитель 15.
Первый модуль 9 вычисления принимает ввод команды id*1 управления током d-оси, команды id*1 управления током q-оси, значения id детектирования тока d-оси, значения iq детектирования тока q-оси и сигнала chsg режима управления. Первый модуль 9 вычисления вычисляет амплитуду магнитного потока на основе значения, полученного посредством вычитания падения сопротивления d-оси из напряжения d-оси на двух осях (d-q-осях) вращения, которые вращаются синхронно с частотами выходных напряжений. Первый модуль 9 вычисления делит на амплитуду магнитного потока значение, полученное посредством вычитания падения сопротивления q-оси из напряжения q-оси, и вычисляет угловую частоту ω1 асинхронной машины 1, которая выполняет свободное вращение.
Поясняется вычисление угловой частоты ω1 посредством первого модуля 9 вычисления. Если две оси (d-q-оси) вращения вращаются при предварительно определенной угловой частоте ω1, составляющая d-оси и составляющая q-оси магнитного потока статора (первичной обмотки) асинхронной машины 1 могут представляться посредством формул (1) и (2).
|


В формулах Rs представляет сопротивление первичной обмотки.
Крутящий момент τm, выводимый посредством асинхронной машины 1, является пропорциональным абсолютной величине внешнего произведения магнитного потока статора и тока статора и может представляться посредством формулы (3). Pm представляет число пар полюсов.
|

Когда направление по d-оси двух осей вращения и направление магнитного потока статора совпадают друг с другом, ϕqs=0. Следовательно, когда ϕqs=0 подставляется в формулах (1) и (2), получаются формулы (4) и (5).
|

В частности, если две оси (d-q-оси) вращения вращаются синхронно с угловой частотой ω, вычисленной согласно формулам (4) и (5), направление по d-оси двух осей вращения и направление магнитного потока статора совпадают друг с другом. Следовательно, первый модуль 9 вычисления задает две оси (d-q-оси) вращения так, что они вращаются синхронно с угловой частотой ω1, полученной посредством выполнения вычисления правой стороны формулы (4) с помощью умножителя 17a, модуля 14a вычитания и модуля 18 интегрирования и посредством выполнения вычисления правой стороны формулы (5) с помощью умножителя 17b, модуля 14b вычитания и делителя 15. Следовательно, направление по d-оси и направление магнитного потока статора могут принудительно совпадать друг с другом, чтобы поддерживать магнитный поток статора q-оси ϕqs=0.
Модуль 16 управления по току имеет преимущество в том, что ток iq d-оси может быть сохранен нулевым посредством присвоения нуля команде iq*1 управления током q-оси; и скорость асинхронной машины 1, которая выполняет свободное вращение, может быть оценена без обеспечения необязательного крутящего момента. В качестве команды id*1 управления током d-оси должно предоставляться только предварительно определенное значение. Например, пошаговое предварительно определенное значение может предоставляться, или предварительно определенное значение может предоставляться с первичной задержкой.
Когда вводится управляющая команда PB и сигнал chsg режима управления находится в режиме 1 управления, первый модуль 9 вычисления работает только в течение предварительно определенного времени (начального времени оценки скорости), заданного заранее. В асинхронной машине 1 для электропоезда предварительно определенное время является временем, равным или превышающим 30 мс и меньше 100 мс (0,1 секунды). Нижний предел задается равным 30 мс, поскольку автор изобретения обнаружил, что, например, в случае электродвигателя для электропоезда (номинальная мощность 100-600 кВт) постоянная времени вторичной обмотки электродвигателя превышает 300 мс, и когда реакция на управляющее воздействие по току модуля 16 управления по току в первом модуле 9 вычисления принимается во внимание, может быть реализована только реакция на управляющее воздействие, превышающая 1/10 постоянной времени вторичной обмотки в 300 мс. Следовательно, из постоянной времени вторичной обмотки электродвигателя в 300 м требуется начальное время оценки скорости, равное или меньшее 30 мс.
Характеристика первого модуля 9 вычисления заключается в том, что скорость (число оборотов) асинхронной машины 1, которая работает на холостом ходу, может точно детектироваться, согласно предварительно определенному времени, заданному таким образом. Также может обеспечиваться преимущество в том, что посредством осуществления управления со временем меньше 0,1 секунды, водитель не испытывает чувства дискомфорта в отношении ускорения и замедления в начальный период оценки скорости.
Фиг.4 изображает блок-схему конфигурации модуля 16 управления по току. Модуль 16 управления по току включает в себя модули 19a и 19b вычитания, модули 20a и 20b переключения, которые являются модулями переключения тока, умножители 21a и 21b, которые выполняют умножение посредством пропорционального усиления Kp для управления по току, умножители 22a и 22b, которые выполняют умножение посредством интегрального усиления KI для управления по току, и модули 23a и 23b интегрирования.
Модуль 16 управления по току принимает ввод команды id*1 управления током d-оси, команды id*1 управления током q-оси, значения id детектирования тока d-оси, значения iq детектирования тока q-оси и сигнала chsg режима управления и вычисляет команду Vq*1 управления напряжением q-оси и команду Vq*1d управления напряжением q-оси.
Когда сигнал chsg режима управления находится в режиме 1 управления, модули 20a и 20b переключения соединяют контакт B и контакт C. Когда сигнал chsg режима управления находится в режиме, отличном от режима 1 управления, модули 20a и 20b переключения соединяют контакт A и контакт C. Например, нуль вводится в контакт A в качестве значения, отличного от id*1 и iq*1. Следовательно, когда сигнал chsg режима управления сдвигается из режима 1 управления в режим 2 управления, в качестве значений команды Vd*1 управления напряжением d-оси и команды Vq*1 управления напряжением q-оси, выводятся значения модулей 23a и 23b интегрирования. Другими словами, значения, накапливаемые в модулях 23a и 23b интегрирования, выводятся как есть из модуля 16 управления по току через сумматоры 24a и 24b. Следует отметить, что значение, вводимое на контакт A, не ограничивается нулем.
На фиг.3 модуль 13 вычисления магнитного потока вторичной d-оси первого модуля 9 вычисления вычисляет магнитный поток ϕdr вторичной d-оси из формулы (6), показанной ниже. Rr представляет сопротивление вторичной обмотки, M представляет взаимоиндуктивность, и Lr представляет индуктивность вторичной обмотки.
|
Поясняется средство для сдвига значений первой команды управления напряжением (Vd*1 и Vq*1), которые являются выходными сигналами первого модуля 9 вычисления, к значениям второй команды управления напряжением (Vd*2 и Vq*2), которые являются выходными сигналами второго модуля 10 вычисления, когда сигнал chsg режима управления сдвигается из режима 1 управления в режим 2 управления, т.е. после того, как скорость асинхронной машины 1, которая работает на холостом ходу, точно детектируется посредством первого модуля 9 вычисления.
Второй модуль вычисления
Фиг.5 изображает блок-схему конфигурации второго модуля 10 вычисления. Второй модуль 10 вычисления включает в себя, в качестве основных компонентов, модуль 25 вычисления команд управления напряжением, модуль 26 вычисления частоты скольжения и модуль 28 оценки частоты электродвигателя.
Модуль 25 вычисления команд управления напряжением вычисляет команду Vd*2 управления напряжением d-оси и команду Vq*2 управления напряжением q-оси с использованием следующих формул (7) и (8) в качестве векторного управления:
|


.'. коэффициент рассеяния σ=1-M2/(Ls*Lr)
где Rs: сопротивление первичной обмотки, Ls: индуктивность первичной обмотки, id*2: команда управления током d-оси, iq*2: команда управления током q-оси, M: взаимоиндуктивность; Lr: индуктивность вторичной обмотки; ω2: угловая частота инвертора. Модуль 26 вычисления частоты скольжения принимает ввод команды id*2 управления током d-оси и команды iq*2 управления током q-оси и вычисляет угловую частоту ωs скольжения с помощью следующей формулы (9) в качестве векторного управления из машинной постоянной:
|
Сумматор 27 суммирует угловую частоту ωs скольжения, вычисленную посредством модуля 26 вычисления частоты скольжения, и угловую частоту ωr электродвигателя, поясненную позднее. Модуль 28 оценки частоты электродвигателя включает в себя модуль 30 оценки магнитного потока, модули 31a, 31b, 31c и 31d интегрирования и модуль 29 оценки частоты вращения ротора.
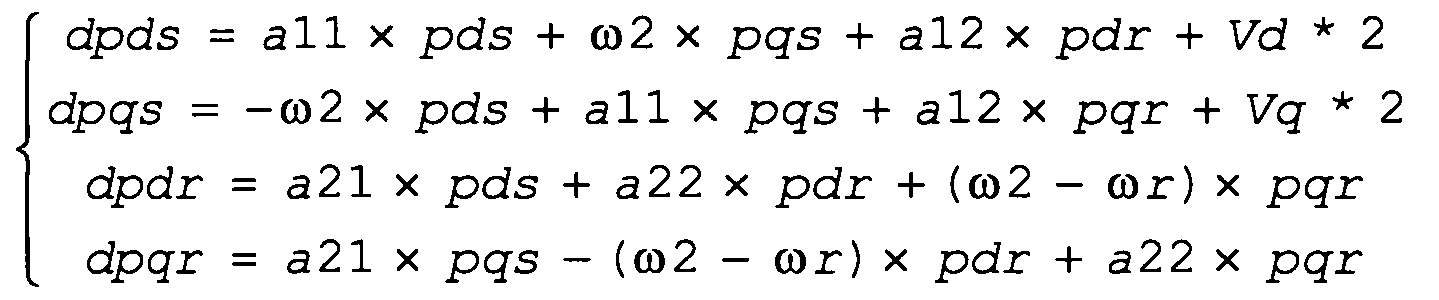
Модуль 30 оценки магнитного потока принимает ввод команды Vd*2 управления напряжением d-оси и команды Vq*2 управления напряжением q-оси и дополнительно принимает, в качестве сигналов обратной связи, ввод значения pds оценки первичного магнитного потока d-оси, значения pqs оценки первичного магнитного потока q-оси, значения pdr оценки вторичного магнитного потока d-оси, значения pqr оценки вторичного магнитного потока q-оси, угловой частоты ω2 инвертора, которая является второй скоростью, и угловой частоты ωr электродвигателя, которая является выводом модуля 29 оценки частоты вращения ротора. Модуль 30 оценки магнитного потока вычисляет, на основе этих входных сигналов, дифференциальные значения dpds, dpqs, dpdr и dpqr согласно формуле (10).
|

Модули 31a, 31b, 31c и 31d интегрирования интегрируют дифференциальные значения dpds, dpqs, dpdr и dpqr значений оценки магнитного потока и вычисляют значения pds, pqs, pdr и pqr оценки магнитного потока, согласно следующей формуле (11):
|
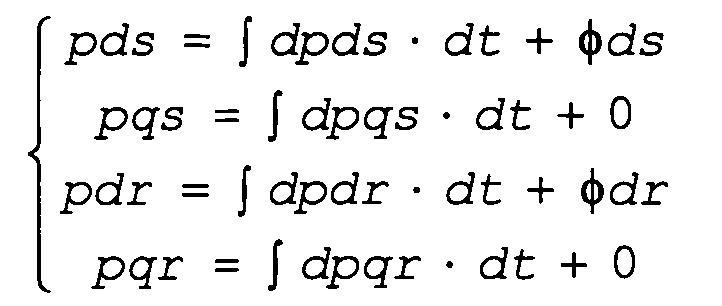
Как указано посредством формулы (11), значение pds оценки магнитного потока первичной d-оси имеет, в качестве начального значения, магнитный поток ϕds первичной d-оси, вычисленный посредством первого модуля 9 вычисления. Вторичное значение pdr оценки магнитного потока имеет, в качестве начального значения, магнитный поток ϕdr вторичной d-оси, вычисленный посредством первого модуля 9 вычисления. Следовательно, обеспечивается преимущество в том, что характер изменения угловой частоты ωr электродвигателя, вычисленной посредством модуля 28 оценки частоты электродвигателя, может быстро совпадать с фактической угловой частотой электродвигателя.
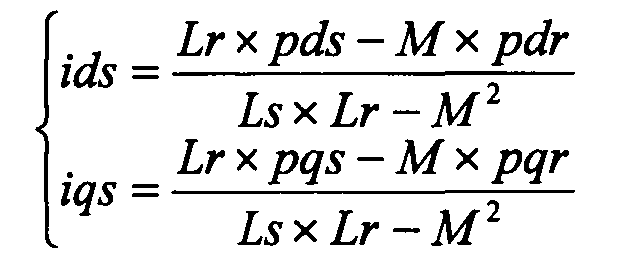
Модуль 29 оценки частоты вращения ротора принимает ввод значений pds, pqs, pdr и pqr оценки магнитного потока и вычисляет значение ids оценки тока d-оси и значение iqs оценки тока q-оси согласно формуле (12).
|
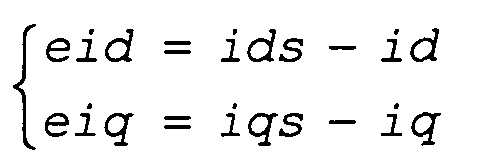
Модуль 29 оценки частоты вращения ротора вычисляет вектор eid погрешности по току d-оси и вектор eiq погрешности по току q-оси из значений ids и iqs оценки тока dq-осей и значений id и iq детектирования тока dq-осей, согласно формуле (13).
|
Модуль 29 оценки частоты вращения ротора принимает ввод векторов eid и eiq погрешности по току dq-осей и значения pdr оценки магнитного потока вторичной d-оси и значения pqr оценки магнитного потока вторичной q-оси и вычисляет расчетное значение aωr ускорения и замедления вращения ротора, согласно формуле (14), где kap представляет пропорциональное усиление для вычисления ускорения и замедления вращения ротора, Tapi представляет постоянную времени интегрирования ускорения и замедления вращения ротора, и s представляет оператор Лапласа.
|

Модуль 29 оценки частоты вращения ротора интегрирует расчетное значение aωr ускорения и замедления вращения ротора, вычисленное, согласно формуле (14), и вычисляет угловую частоту ωr электродвигателя, которая вычисляется посредством модуля 28 оценки частоты электродвигателя, согласно формуле (15).
|

Как и при вычислении значений оценки магнитного потока, угловая частота ωr электродвигателя имеет, в качестве начального значения, угловую частоту ω1, вычисленную посредством первого модуля 9 вычисления. Вычисленная угловая частота ωr электродвигателя суммируется с угловой частотой ωs скольжения посредством сумматора 27, как указано формулой (16), и получается угловая частота ω2 инвертора.
|

Модуль переключения команд управления напряжением
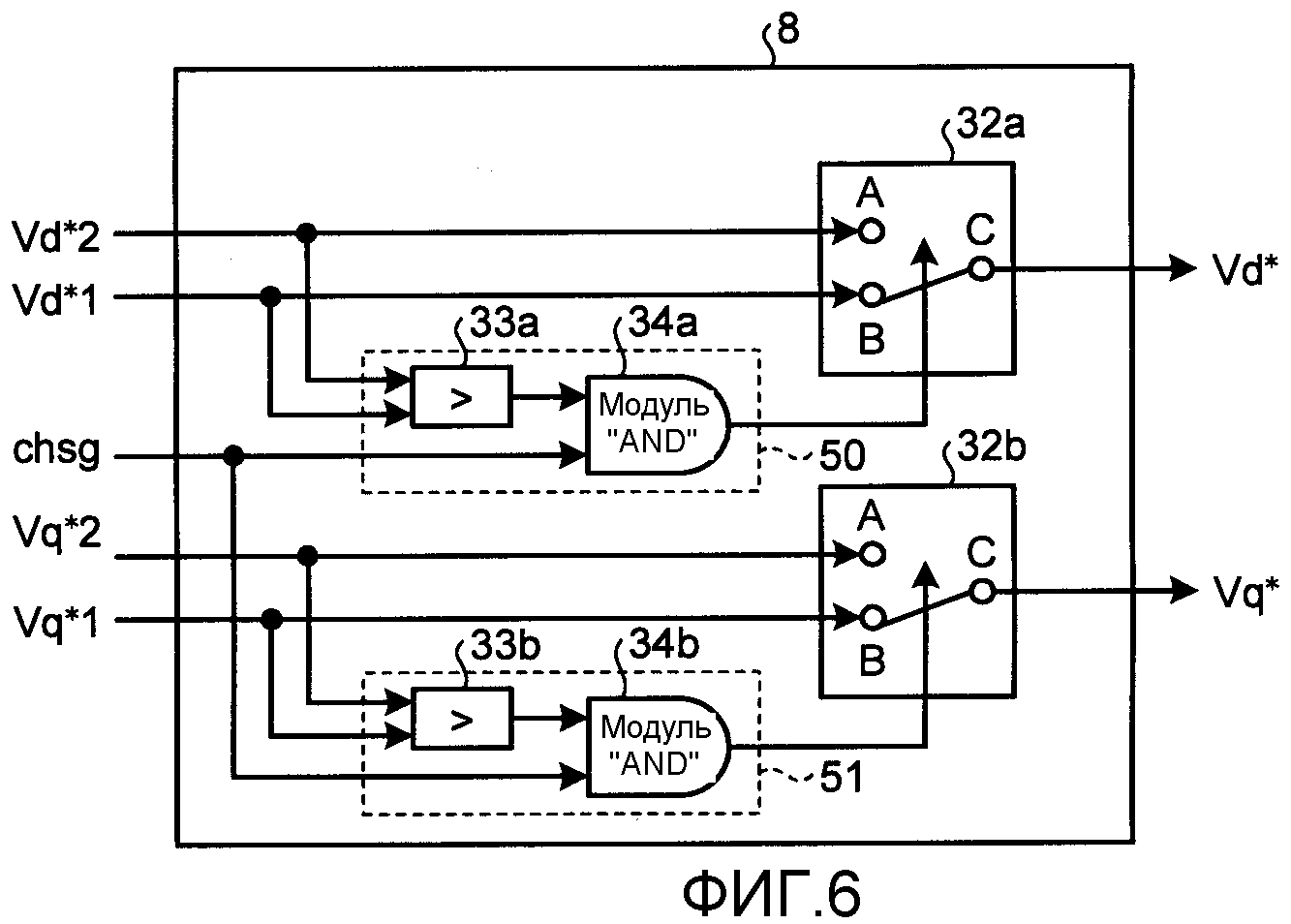
Фиг.6 изображает блок-схему конфигурации модуля 8 переключения команд управления напряжением. Модуль 8 переключения команд управления напряжением включает в себя, в качестве основных компонентов, модуль 50 определения переключения на первую команду управления напряжением, модуль 51 определения переключения на вторую команду управления напряжением и модули 32a и 32b переключения, которые являются модулями переключения напряжения. Модуль 50 определения переключения на первую команду управления напряжением включает в себя модуль 33a сравнения и модуль логического произведения или модуль 34a "AND". Модуль 51 определения переключения на вторую команду управления напряжением включает в себя модуль 33b сравнения и модуль 34b логического произведения.
Модуль 8 переключения команд управления напряжением принимает ввод команды Vd*1 управления напряжением d-оси и команды Vq*1 управления напряжением q-оси, вычисленных посредством первого модуля 9 вычисления, команды Vd*2 управления напряжением d-оси и команды Vq*2 управления напряжением q-оси, вычисленных посредством второго модуля 10 вычисления, и сигнала chsg режима управления.
Этот модуль 8 переключения команд управления напряжением является характеристикой этого варианта осуществления. Как показано на фиг.2, даже если сигнал chsg режима управления переключается с режима 1 управления в режим 2 управления, если Vd*2 меньше Vd*1, модуль 8 переключения команд управления напряжением задает Vd*1 в качестве команды vd* управления напряжением d-оси. Эта операция реализуется посредством модуля 33a сравнения, модуля 34a логического произведения и модуля 32a переключения. Идентичная операция также выполняется относительно команд Vq*2, Vq*1 и Vq+ управления напряжением q-оси.
Эта операция поясняется подробно с использованием фиг. 2. Например, когда модуль 33b сравнения и модуль 34b логического произведения определяют то, что значение Vq*2 меньше Vq*1 в точке (t2), когда режим 1 управления изменяется на режим 2 управления, модуль 32b переключения соединяет контакт B и контакт C и выводит Vq*1 в качестве Vq*. В точке (t3), когда значение Vq*2 практически совпадает с Vq*1, модуль 32b переключения соединяет контакт A и контакт C и выводит Vq*2 в качестве Vq*. На фиг.2 изменение в коэффициенте PMF модуляции указывает абсолютную величину команды управления выходным напряжением инвертора в качестве коэффициента для максимального напряжения, которое может выводить инвертор. Тем не менее, коэффициент PMF модуляции изменяется практически идентично команде vq* управления напряжением q-оси.
Модуль переключения скорости
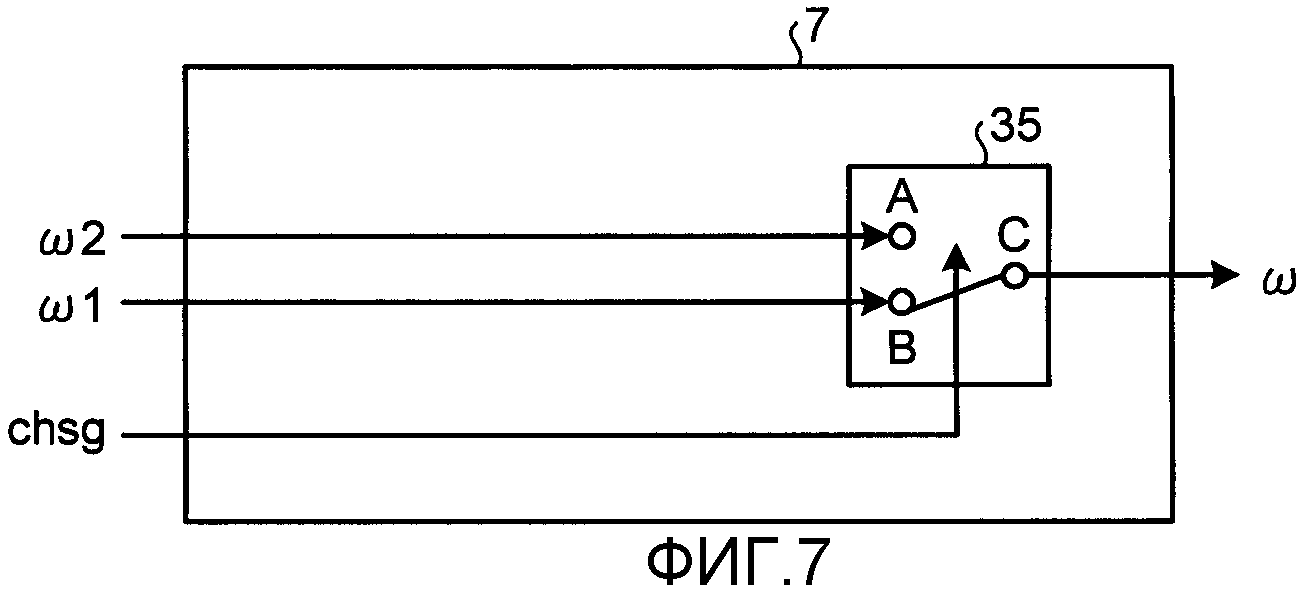
Фиг.7 изображает блок-схему конфигурации модуля 7 переключения скорости. Модуль 7 переключения скорости включает в себя модуль 35 переключения, который принимает ввод угловой частоты ω1, вычисленной посредством первого модуля 9 вычисления, угловой частоты ω2 инвертора, вычисленной посредством второго модуля 10 вычисления, и сигнала chsg режима управления.
Модуль 35 переключения соединяет контакт A и контакт C, когда сигнал chsg режима управления переключается с режима 1 управления в режим 2 управления. Как результат, угловая частота ω2 инвертора, вычисленная посредством второго модуля 10 вычисления, изменяется на ω, и ω вводится в модуль 6 вычисления фазы.
Как пояснено выше, устройство преобразования мощности, согласно этому варианту осуществления, включает в себя первый модуль 9 вычисления, который вычисляет на основе электрических токов, детектируемых посредством модулей 3a-3c детектирования тока, команду Vq*1 управления напряжением q-оси и команду Vd*1 управления напряжением d-оси, которые являются информацией скорости асинхронной машины 1; и второй модуль 10 вычисления, который задает, в качестве начальных значений, первичный магнитный поток ϕds d-оси и вторичный магнитный поток ϕdr d-оси, вычисленные посредством первого модуля 9 вычисления, и значение ω1 оценки скорости; и выводит команду Vq*2 управления напряжением q-оси и команду Vd*2 управления напряжением d-оси и угловую частоту ω2 инвертора. Следовательно, характер изменения угловой частоты электродвигателя может быстро совпадать с фактической угловой частотой электродвигателя.
Дополнительно, устройство преобразования мощности включает в себя модуль 8 переключения команд управления напряжением, который определяет, согласно сигналу chsg режима управления, значения команды Vq*1 управления напряжением q-оси и команды Vq*2 управления напряжением q-оси и значения команды Vd*1 управления напряжением d-оси и команды Vd*2 управления напряжением d-оси и выводит команду управления напряжением; и модуль 7 переключения скорости, который переключает значение ω1 оценки скорости или угловую частоту ω2 инвертора, согласно сигналу chsg режима управления, и выводит значение ω1 оценки скорости или угловую частоту ω2 инвертора в модуль 6 вычисления фаз. Следовательно, по сравнению с предшествующим уровнем техники, можно уменьшать резкое повышение крутящего момента во время, когда асинхронная машина 1 перезапускается. Дополнительно, устройство преобразования мощности включает в себя модуль 12 переключения управления, в котором время сигнала режима 1 управления задается равным времени, равному или меньше 0.1 секунды. Следовательно, поскольку задержка до тех пор, пока преобразователь 2 мощности и асинхронная машина 1 не начинают операцию ускорения и замедления после того, как управляющая команда PB введена, подавляется, можно исключать чувство дискомфорта у водителя.
Второй вариант осуществления
Устройство преобразования мощности, согласно второму варианту осуществления, сконфигурировано с возможностью вычисления значения оценки скорости выше фактической частоты электродвигателя и предотвращения повышения напряжения на стороне постоянного тока посредством присвоения усиления коррекции, которое является предварительно определенным усилением значению ω1 оценки скорости, вычисленному посредством первого модуля 9 вычисления. Конфигурация и работа устройства управления устройства преобразования мощности, согласно этому варианту осуществления, поясняются ниже. Компоненты, идентичные компонентам в первом варианте осуществления, обозначаются посредством идентичных ссылок с номерами, и пояснение этих компонентов опускается. Поясняются только отличия от первого варианта осуществления.
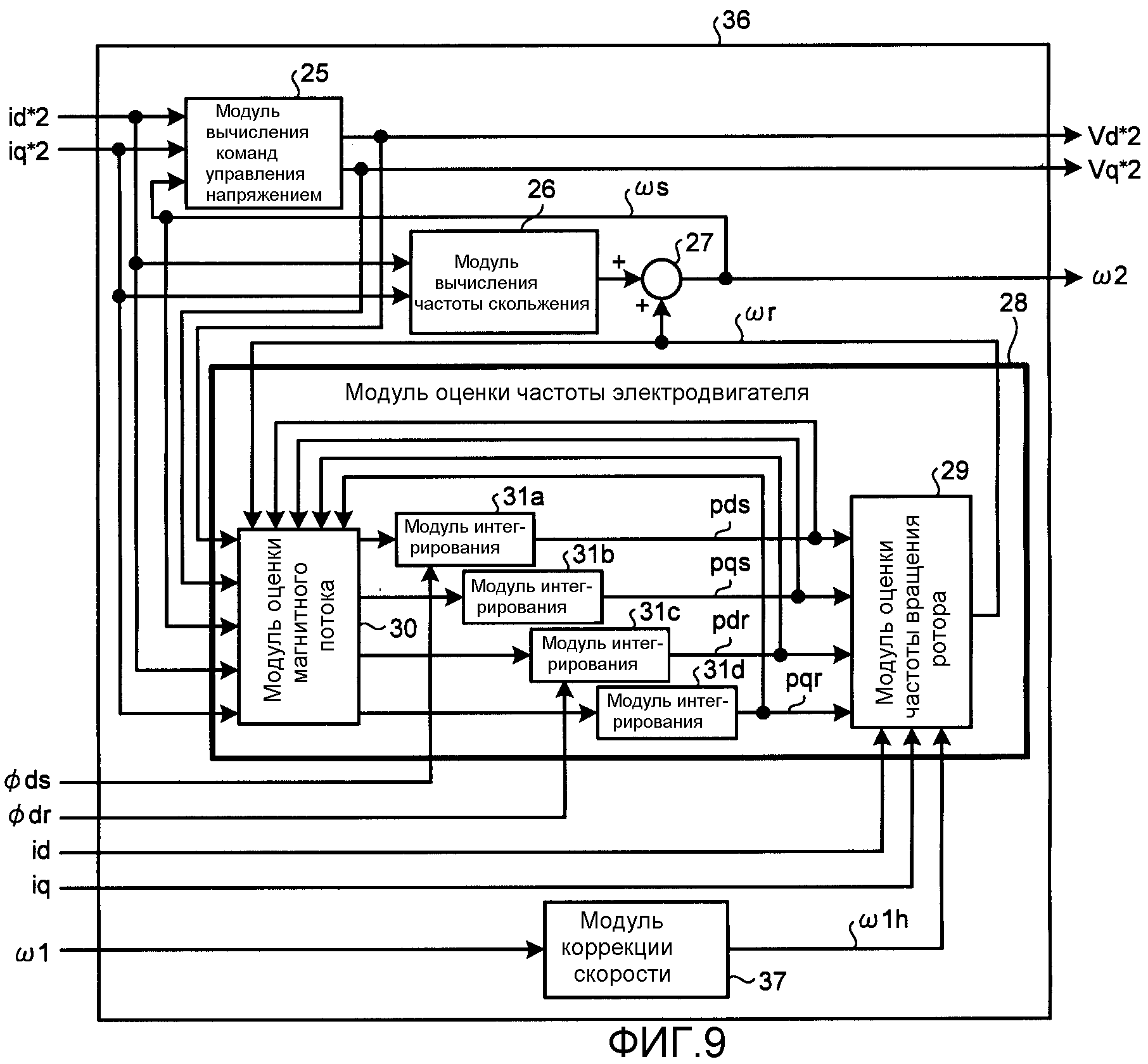
Фиг.8 изображает блок-схему примера конфигурации устройства преобразования мощности, согласно второму варианту осуществления. Фиг. 9 изображает блок-схему конфигурации второго модуля 36 вычисления, согласно второму варианту осуществления. Второй модуль 36 вычисления включает в себя модуль 37 коррекции скорости, который является таблицей для умножения значения ω1 оценки скорости, которое вычисляется посредством первого модуля 9 вычисления, на коэффициент усиления коррекции и задания угловой частоты ω1h, умноженной на коэффициент усиления коррекции, в качестве начального значения скорости модуля 29 оценки частоты вращения ротора.
Причина для присвоения коэффициенту усиления коррекции значения ω1 оценки скорости поясняется ниже. Если ω1, оцененное посредством первого модуля 9 вычисления, оценивается так, как указано посредством сплошной линии от t1 к t2 на фиг.2, если значение этого ω1 (сплошная линия) меньше фактической скорости вращения асинхронной машины 1, асинхронная машина 1 переходит в режим рекуперации. Когда асинхронная машина 1 переходит в режим рекуперации, таким образом, рекуперируемая мощность подается на преобразователь 2 мощности, и напряжение конденсатора 38, расположенного на первичной стороне преобразователя 2 мощности, повышается. В качестве средства для предотвращения этой ситуации, модуль 37 коррекции скорости умножает значение ω1 оценки скорости на предварительно определенный коэффициент усиления коррекции, чтобы получать ω1h, согласно значению ω1 оценки скорости, вычисленному посредством первого модуля 9 вычисления.
Фиг.10 изображает график для пояснения работы модуля 37 коррекции скорости. Горизонтальная ось графика указывает значение ω1 оценки скорости, вычисленное посредством первого модуля 9 вычисления, и вертикальная ось указывает значение ω1h оценки скорости после коррекции. На фиг.10 показывается характеристика, полученная, когда значение ω1 оценки скорости умножается на усиление в 1,00 раз, и характеристика, полученная, когда значение ω1 оценки скорости умножается на предварительно определенный коэффициент усиления коррекции.
В области, в которой частота электродвигателя является низкой, модуль 37 коррекции скорости предоставляет, например, усиление в 1,05 раз для значения ω1 оценки скорости. В области, в которой частота электродвигателя является высокой, модуль 37 коррекции скорости предоставляет, например, усиление в 1,01 раз для значения ω1 оценки скорости. Таким образом, модуль 37 коррекции скорости выполнен так, что усиление, предоставленное значению ω1 оценки скорости, изменяется согласно значению частоты электродвигателя. Значения усиления указывают примеры и не ограничены этими значениями.
Как пояснено выше, устройство преобразования мощности согласно этому варианту осуществления включает в себя модуль 37 коррекции скорости, который прибавляет предварительно определенный коэффициент усиления к начальному значению, заданному в модуле 29 оценки частоты вращения ротора. Следовательно, поскольку может быть задано значение выше фактической частоты электродвигателя асинхронной машины 1, рекуперируемая мощность не подается на конденсатор 38 и повышение напряжения на стороне постоянного тока может предотвращаться.
Второй модуль 10 вычисления может быть выполнен с возможностью вычислять, по меньшей мере, одно из магнитных потоков d-оси (ϕds и ϕdr) и угловой частоты ω1 в качестве начального значения. Устройства преобразования мощности, поясненные в первом и втором вариантах осуществления, указывают примеры содержимого настоящего изобретения. Само собой разумеется, что устройства преобразования мощности могут быть комбинированы с другими общеизвестными технологиями или могут быть выполнены с возможностью изменения, например, посредством пропуска их части без отступления от сущности настоящего изобретения.
Промышленная применимость
Как пояснено выше, настоящее изобретение может применяться к устройству преобразования мощности, которое может перезапускать вращающуюся машину переменного тока без использования детектора скорости. В частности, настоящее изобретение является полезным в качестве изобретения для дополнительного уменьшения ударного крутящего момента и повышения напряжения на стороне постоянного тока при перезапуске вращающейся машины переменного тока, которая находится в состоянии холостого хода.
Список номеров ссылок
1 - асинхронная машина (вращающаяся машина переменного тока)
2 - преобразователь мощности
3a, 3b, 3c - модули детектирования тока
4 - модуль преобразования трехфазных координат в координаты по dq-осям
5 - модуль преобразования координат по dq-осям в трехфазные координаты
6 - модуль вычисления фаз
7 - модуль переключения скорости
8 - модуль переключения команд управления напряжением
9 - первый модуль вычисления
10 - второй модуль вычисления
11 - модуль команд управления током
12 - модуль переключения управления
13 - модуль вычисления вторичного магнитного потока d-оси
14a, 14b - модули вычитания
15 - делитель
16 - модуль управления по току
17a, 17b - модули усиления сопротивления
18, 31a, 31b, 31c, 31d - модули интегрирования
19a, 19b - модули вычитания
20a, 20b - модули переключения (модули переключения тока)
21a, 21b, 22a, 22b - умножители
23a, 23b - модули интегрирования
24a, 24b, 27 - сумматоры
25 - модуль вычисления команд управления напряжением
26 - модуль вычисления частоты скольжения
28 - модуль оценки частоты электродвигателя
29 - модуль оценки частоты вращения ротора
30 - модуль оценки магнитного потока
32a, 32b - модули переключения (модули переключения напряжения)
35 - модуль переключения
33a, 33b - модули сравнения
34a, 34b - модули "И"
36 - второй модуль вычисления
37 - модуль коррекции скорости
38 - конденсатор
50 - модуль определения переключения на первую команду управления напряжением
51 - модуль определения переключения на вторую команду управления напряжением
60 - модуль управления
chsg - сигнал режима управления
dpds, dpqs, dpdr, dpqr - дифференциальные значения
id - значение детектирования тока d-оси (информация тока)
iq - значение детектирования тока q-оси (информация тока)
iu, iv, iw - фазные токи (информация тока)
id*1 - команда управления током d-оси для первого модуля вычисления (значение команды управления током)
id*1 - команда управления током q-оси для первого модуля вычисления (значение команды управления током)
id*2 - команда управления током d-оси для второго модуля вычисления (значение команды управления током)
iq*2 - команда управления током q-оси для второго модуля вычисления (значение команды управления током)
ids - значение оценки тока d-оси
iqs - значение оценки тока q-оси
Kp - пропорциональное усиление для управления по току
KI - интегральное усиление для управления по току
PB - управляющая команда
PMF - коэффициент модуляции
pds - значение оценки первичного магнитного потока d-оси
pqs - значение оценки первичного магнитного потока q-оси
pdr - значение оценки вторичного магнитного потока d-оси
pqr - значение оценки вторичного магнитного потока q-оси
Vd* - команда управления напряжением d-оси (значение команды управления напряжением)
Vq* - команда управления напряжением q-оси (значение команды управления напряжением)
Vd*1 - команда управления напряжением d-оси, вычисленная посредством первого модуля вычисления (значение первой команды управления напряжением)
Vq*1 - команда управления напряжением q-оси, вычисленная посредством первого модуля вычисления (значение первой команды управления напряжением)
Vd*2 - команда управления напряжением d-оси, вычисленная посредством второго модуля вычисления (значение второй команды управления напряжением)
Vq*2 - команда управления напряжением q-оси, вычисленная посредством второго модуля вычисления (значение второй команды управления напряжением)
ϕds - магнитный поток первичной d-оси
ϕdr - магнитный поток вторичной d-оси
ω1 - угловая частота асинхронной машины во время свободного вращения (первая скорость)
ω2 - угловая частота инвертора (вторая скорость)
ωr - угловая частота электродвигателя
ωs - угловая частота скольжения
Устройство управления транспортным средством
Спиральный компрессор
Многоэкранное дисплейное устройство
Способ связи, базовая станция, система связи и мобильный терминал
Устройство управления силовой установкой для электрического транспортного средства
Силовой преобразователь
Pon-система, устройство на стороне станции и устройство на стороне абонента
Устройство для кодирования изображений, устройство для декодирования изображений, способ кодирования изображений и способ декодирования изображений
Устройство управления для транспортного средства с электрическим двигателем переменного тока
Устройство управления и способ управления электрической вращающейся машиной
Устройство управления транспортным средством
Спиральный компрессор
Многоэкранное дисплейное устройство
Способ связи, базовая станция, система связи и мобильный терминал
Устройство управления силовой установкой для электрического транспортного средства
Силовой преобразователь
Pon-система, устройство на стороне станции и устройство на стороне абонента
Устройство для кодирования изображений, устройство для декодирования изображений, способ кодирования изображений и способ декодирования изображений
Устройство управления для транспортного средства с электрическим двигателем переменного тока
Устройство управления и способ управления электрической вращающейся машиной

