Результат интеллектуальной деятельности: КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ
Вид РИД
Изобретение
Изобретение относится к космической технике и может быть использовано на различных типах космических аппаратов, стабилизируемых вращением.
Известен космический аппарат со стабилизацией вращением, содержащий корпус аппарата, развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции космического аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей, а также подключенными к токосборным контурам экранированными от внешнего магнитного поля токонесущими проводами, при этом токосборные силовые контуры и фотоэлектрические преобразователи объединены с обеспечением согласного направления их токов относительно корпуса космического аппарата [Никонов О.И. Космический аппарат со стабилизацией вращением. Патент РФ №2088494 от 08.09.97 г.].
Недостатком указанного космического аппарата является необходимость регулирования скорости собственного вращения аппарата при превышении оптимального значения, особенно при работе батарей в режиме перегрузок либо короткого замыкания, когда момент силы Ампера, приложенной к аппарату в результате взаимодействия токов солнечных батарей с магнитным полем Земли, будет значительно превышать действие тормозящих факторов.
Известен также космический аппарат со стабилизацией вращением, содержащий солнечные батареи, размещенные симметрично относительно оси максимального момента инерции космического аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей солнечных батарей с обеспечением согласного направления их токов относительно корпуса аппарата, экранированные токонесущие провода, подключенные к токосборным силовым контурам, и неэкранированные токонесущие провода, подключенные к указанным токосборным контурам параллельно токонесущим проводам, снабженный датчиком угловой скорости относительно оси вращения аппарата, при этом указанные экранированные и неэкранированные токонесущие провода подключены к указанным токосборным силовым контурам посредством вентилей, управляющие входы которых через симметричный триггер, заторможенный блокинг-генератор и устройство сравнения, к которому подключен генератор пилообразного напряжения, связаны с выходом указанного датчика угловой скорости [Полончик О.Л., Решетко А.А. Космический аппарат со стабилизацией вращением. Патент РФ №2136550 от 10.09.99 г.].
Недостатком указанного космического аппарата является наличие экранированных токонесущих проводов, подключенных параллельно неэкранированным токонесущим проводам посредством вентилей. Другим существенным недостатком является то, что на участках орбиты, где вектор магнитной индукции магнитного поля Земли параллелен плоскости солнечных батарей, управление вращением космического аппарата отсутствует.
Задачей, на решение которой направлено предлагаемое изобретение, является создание управляющего вращательного момента, являющегося результатом взаимодействия электрических токов, протекающих в рамках управления космического аппарата с магнитным полем Земли, относительно центра масс и обеспечение поддержания угловой скорости собственного вращения космического аппарата в заданных пределах путем управления компенсирующим на влияние возмущающих факторов воздействием.
Это достигается тем, что создание управляющего вращательного момента и обеспечение поддержания угловой скорости собственного вращения космического аппарата в заданных пределах путем управления компенсирующим на влияние возмущающих факторов воздействием обеспечивается рамками управления, вращающимися относительно оси максимального момента инерции аппарата за счет взаимодействия токов в этих рамках с магнитным полем Земли, коммутация которых производится датчиком контроля углового вращения.
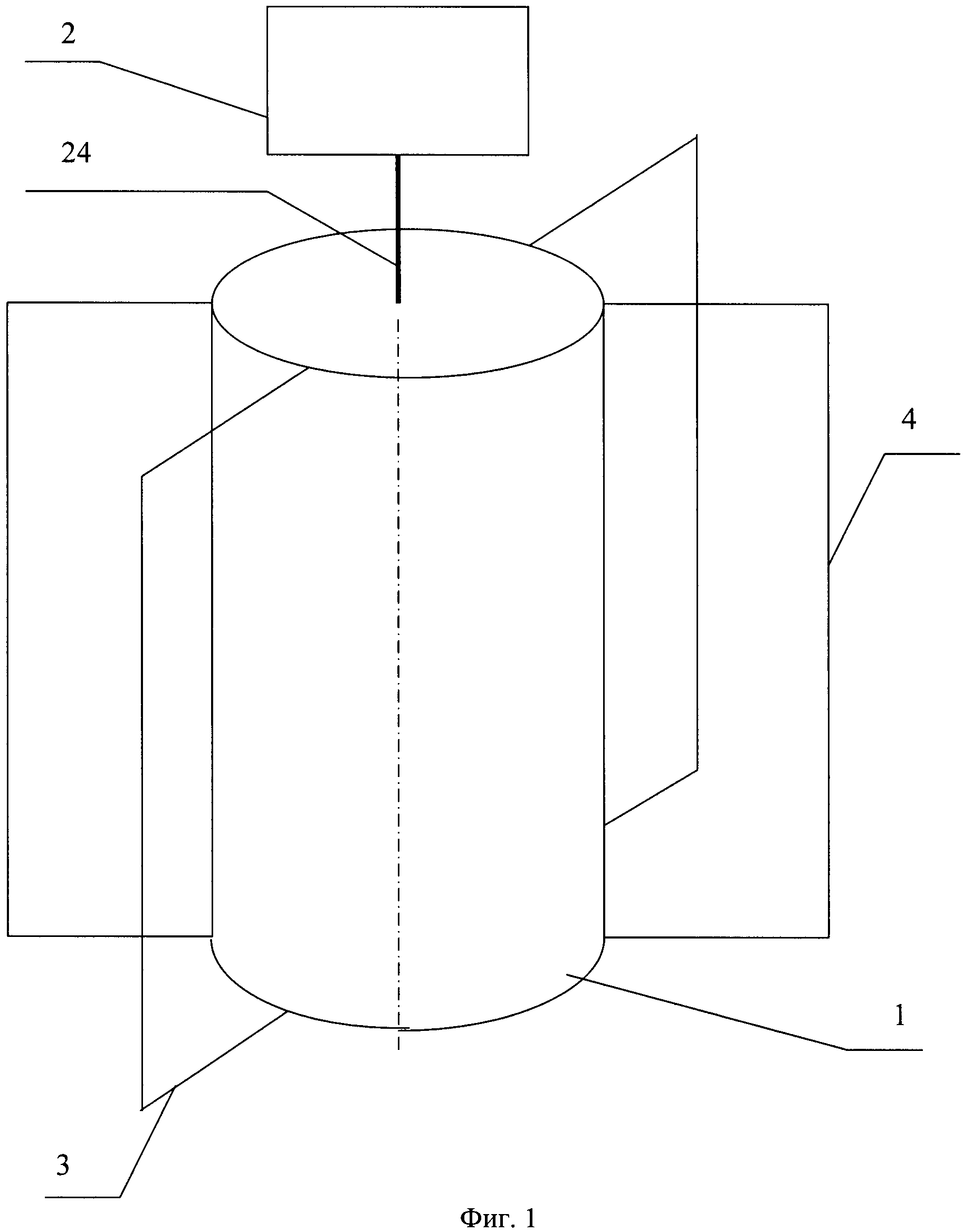
На фиг.1 и фиг.2 представлена схема космического аппарата со стабилизацией вращением. Она состоит из корпуса космического аппарата 1, датчика контроля углового вращения 2, взаимоперпендикулярных рамок управления 3, 4, жестко прикрепленных к корпусу космического аппарата, фотосчитывателя 5, источника света 7, схемы ИЛИ 8, диска с отверстиями 6, находящегося на валу 24, симметричного триггера 9, счетчика 10, 19, триггера Шмитта 11, вентилей 12, 13, 14, 15, аккумулятора 16, нагрузки 17, генератора импульсов 18, устройства сравнения 20. Датчик контроля углового вращения состоит из обмотки контроля 23, аккумулятора 21, реле 25, солнечной батареи 22 и находится на вале 24, связанном через подшипник 26 с корпусом космического аппарата 1.
Способ осуществляется воздействием па корпус космического аппарата 1 силы F, являющейся результатом взаимодействия магнитного поля Земли с токами, протекающими в рамках управления 3,4.
F=BSIsin(B,P),
где В - магнитная индукция;
S - площадь рамки управления;
I - сила тока.
В исходном состоянии реле 25 обесточено, обмотка контроля 23 обесточена, идет подзарядка аккумулятора 21 от солнечной батареи 22, диск 6 неподвижен, на выходе фотосчитывателя 5 - нуль, схемы ИЛИ 8 - нуль. С генератора импульсов 18 на счетчик 19 поступают импульсы, счетчик 19 будет заполнен, на выходе устройства сравнения 20 - нуль, на инверсном выходе - единица, на первом выходе симметричного триггера 9 - единица, на втором - нуль, вентиль 14 - открыт, вентиль 15 - закрыт. Триггер Шмитга 11 - в произвольном состоянии. Допустим, что на первом выходе триггера Шмитга 11 единица, тогда вентиль 12 - открыт, 13 - закрыт. По цепи - минус аккумулятора 16, нагрузка 17, вентиль 12, рамка управления 3, вентиль 14, плюс аккумулятора 16 протекает ток. Рамка управления 3, по которой протекает ток, взаимодействует с магнитным полем Земли, за счет силы Ампера повернет корпус космического аппарата относительно центра массы (стабилизируемой оси) на такой угол пока через нее не станет проходить максимальный магнитный поток.
В счетчик 10 записывается временной интервал, равный 1/4 требуемого периода вращения. При подаче напряжения на реле 25 на обмотку контроля (23) подается напряжение с аккумулятора 21. Под действием магнитного поля Земли обмотка контроля начинает поворачиваться до такого состояния, пока поток магнитного поля, проходящий через нее, не будет максимальным. Вместе с ней поворачивается вал 24, диск с отверстиями 6. При пересечении отверстием диска светового потока с источником 7 срабатывает фотосчитыватель 5, на его выходе - единица, на выходе схемы ИЛИ (8) - единица, триггер Шмитта 11 переворачивается, открывается вентиль 13, вентиль 12 закрывается, подключается рамка управления 4, отключается рамка управления 3. Таким образом, произошла коммутация рамок управления. Рамка управления 4 поворачивает корпус космического аппарата 1 вокруг стабилизируемой оси. Начинается раскрутка корпуса космического аппарата 1. Импульс с выхода системы ИЛИ 8 сбрасывает счетчик 19 в исходное состояние. С генератора импульсов 18 на счетный вход счетчика 19 начинают поступать импульсы, счетчик заполняется. Если число импульсов, записанное в счетчик 19, совпадает с числом импульсов в счетчике 10, на выходе схемы сравнения 20 - единица, на ее инверсном выходе - нуль. Симметричный триггер 9 переворачивается, закрывается вентиль 14, открывается вентиль 15, рамки управления обесточиваются. Аккумулятор 16 через вентиль 15 подключен к нагрузке 17.
Таким образом по сравнению с прототипом данный способ позволяет:
1) обеспечить создание и поддержание угловой скорости вращения космического аппарата со стабилизацией вращением в заданных приделах без использования дополнительных экранированных проводников;
2) получить большее значение силы Ампера;
3) создать на базе датчика контроля углового вращения стабилизированную неподвижную или медленно меняющую свое угловое положение платформу для размещения на ней приборов астронавигационной привязки, антенн связи со спутниками ретрансляторами.
Космический аппарат со стабилизацией вращением, содержащий корпус, датчик контроля углового вращения, состоящий из обмотки контроля, аккумулятора, реле, солнечной батареи; две взаимно перпендикулярные рамки управления, размещенные симметрично относительно оси максимального момента инерции космического аппарата и жестко прикрепленные к корпусу аппарата; фотосчитыватель, логическую схему ИЛИ, источник света, диск с отверстиями, находящийся на валу вращения; симметричный триггер, два счетчика, триггер Шмитта, четыре вентиля, два аккумулятора, нагрузку, генератор импульсов, устройство сравнения, подшипник, отличающийся тем, что создание управляющего вращательного момента и обеспечение поддержания угловой скорости собственного вращения космического аппарата в заданных пределах путем управления компенсирующим на влияние возмущающих факторов воздействием обеспечивается рамками управления, вращающимися относительно оси максимального момента инерции аппарата за счет взаимодействия токов в этих рамках с магнитным полем Земли, коммутация которых производится датчиком контроля углового вращения.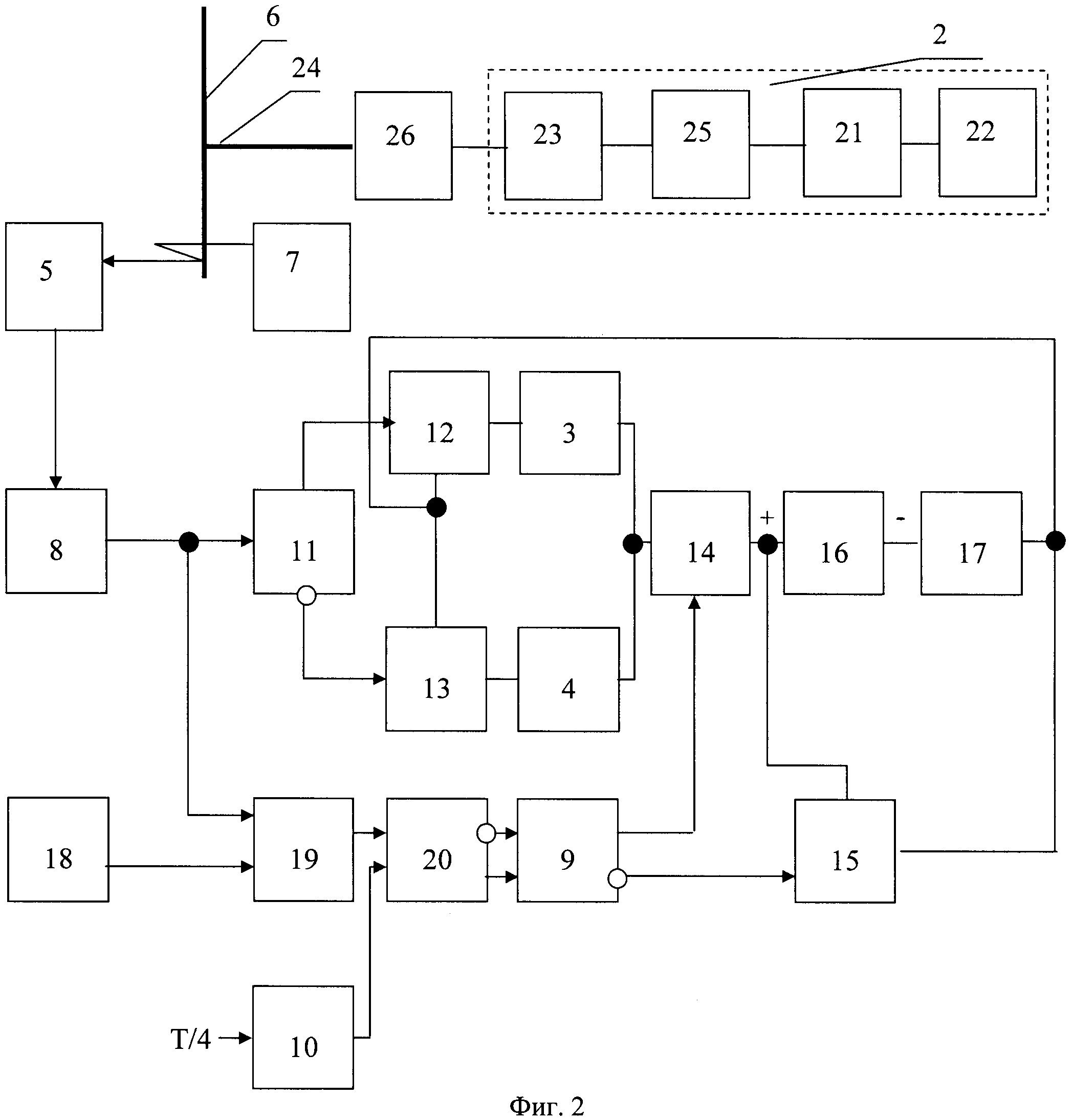
Трансформатор с трехфазной и круговой обмотками
Способ разработки лесосек
Способ осаждения ионов хрома (vi)
Пневмоуправляемая пила
Пневмоуправляемая пила
Способ погрузки лесоматериалов
Способ получения магнитоактивного соединения
Способ получения нитратов целлюлозы
Способ получения 2,4-динитрофенола
Способ получения магнитоактивного соединения

