Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИЗМЕРЕННЫХ ГЛУБИН ЗВУКОВЫМИ СИГНАЛАМИ
Вид РИД
Изобретение
Изобретение относится к области навигации, а более конкретно к способам определения местоположения измеренных глубин преимущественно посредством многолучевого эхолота.
Известные способы определения местоположения измеренных глубин звуковыми сигналами (Wiele T.V. Aspect of Accuracy Analis for Sounding. // The gidrographic journal. N95, 2000, 19-21 pp. [1]. Hare R. Depth and position error budgets for multibeam echosounding. // JHR, v.72, N2, 1995, 37-69 pp. [2]), включают излучение звуковых сигналов в виде импульсов посредством многолучевого эхолота, прием отраженных сигналов, измерение глубин, включающее обработку сигналов и определение величин глубин при различных наклонах излучения с определением погрешности в оценке местоположения отражения звукового импульса от дна при различных наклонах излучения. При этом основной составной частью является оценка погрешности за счет вращения судна, обусловленного килевой и бортовой качкой и рысканьем судна относительно курса. Решение этой задачи в известных способах сводится к составлению матрицы вращения с помощью соответствующих углов Эйлера. Дисперсии углов Эйлера и элементы матрицы вращения используются для получения линеаризованных уравнений для оценки погрешности измерений.
При таком решении задачи конечные результаты не являются достоверными по двум основным причинам.
Во-первых, существует двенадцать вариантов представления одного и того же конечного вращения твердого тела (судна) вокруг неподвижной точки (центра тяжести судна) с использованием углов Эйлера в трехмерном пространстве. Каждый вариант отличается своей последовательностью осей, вокруг которых осуществляются повороты, с соответствующими своими углами Эйлера, при этом реальное вращательное движение судна не соответствует полностью ни одному из этих вариантов. От выбора базового варианта зависит конкретный вид функциональной зависимости между углами Эйлера в элементах матрицы вращения. Это в конечном итоге приводит к различным уравнениям в окончательном выражении для определения погрешности за счет вращения судна при измерении глубины многолучевым эхолотом, что приводит к неоднозначности полученных результатов.
Во-вторых, использование в качестве основного параметра в оценке погрешности углов Эйлера не обеспечивает получение достоверных конечных результатов, т.к. дисперсия как момент вероятностного распределения информативна только для нормального распределения, а угол Эйлера задан на конечном интервале [0; 2π] и не может соответствовать нормальному закону распределения.
Для соответствия значений угла Эйлера нормальному распределению осуществляют переход от конечного интервала к бесконечному с помощью тангенса угла, но это не приводит к положительному эффекту, т.к. распределение Коши не имеет дисперсии (Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1978, 831 с.[3]).
Повышение точности измерения глубины многолучевым эхолотом путем получения достоверных определений погрешности измерения реализовано в способе определения местоположения измеренных глубин звуковыми сигналами, включающем излучение звуковых сигналов посредством многолучевого эхолота, прием отраженных сигналов, измерение глубин, содержащие обработку сигналов и определение величин глубин при различных наклонах излучения с определением погрешности в оценке местоположения отражения сигнала от случайного вращения судна, в котором определение погрешности осуществляют по значению плотности распределения случайного вращения судна в соответствии с зависимостью  , где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси (патент RU №2266551 [6]).
, где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси (патент RU №2266551 [6]).
Осуществление известного способа [6] основывается на том, что конечное движение судна между двумя последовательными посылками звукового импульса может быть представлено как винтовое перемещение вокруг некоторой неподвижной оси (теорема Эйлера-Даламбера) и конечное вращение судна можно определить с использованием направляющих косинусов оси поворота вместе с углом поворота вокруг этой оси [3]. Для каждого момента посылки звукового импульса имеется своя ось поворота и свой угол поворота вокруг нее. Направление этой оси относительно фиксированной прямоугольной системы координат, связанной с центром масс судна, лежит в конусе с осью, совпадающей с осью, которая направлена по курсу судна, а ось поворота направлена в сторону левого борта, а ось вращения направлена вертикально вверх. При этом косинусы оси вращения относительно этих осей связаны с углами Эйлера выражениями [3]:


где Ω=sin(δ/2), δ - угол поворота вокруг оси; α, β, γ - углы Эйлера следующей последовательности поворотов, определяющих вращение:
1. Поворот вокруг оси u3 на угол α;
2. Поворот вокруг оси u2 на угол β;
3. Поворот вокруг оси u3 на угол γ.
Так как промерные работы выполняются при достаточно малых углах бортовой и килевой качки и при устойчивом движении судна по курсу (Руководство по промерным работам [4]), то для оценок углов Эйлера используются значения соответствующих углов качки - бортовой для β, килевой для γ, и ошибок курсовых углов для α. При этом α≈γ<<β, т.е. при малых углах Эйлера выражение (1), (2) и (3) приводят к соотношению c3≈c2>>c1, которые показывают, что ось вращения судна лежит в конусе с осью, совпадающей с осью u1.
При переходе к сферическим координатам описания положения оси вращения θ и φ (0≤θ≤π - полярное расстояние, 0≤φ≤2π - долгота) вращение судна будет определяться трехмерным параметрическим пространством (θ, φ, δ), где 0≤δ≤2π.
При равномерном распределении этих трех параметров вероятностная мера соответствует выражению (Кендалл, Моран П. Геометрические вероятности. М.: Наука, 1972, 192 c. [5]):

Определив плотность распределения параметров θ, φ, δ и используя выражение (4), определяют плотность распределения случайного вращения судна. В полярных координатах ось вращения судна будет иметь координаты, близкие к θ≈π/2, φ≈0.
Для задания плотностей распределения каждого из углов θ, φ, δ, заданных на конечных интервалах, используют бета-распределение с плотностью [3]:

Здесь Г(*) - гамма-функция, a, b - положительные действительные параметры.
В конечном итоге плотность распределения случайного вращения судна с учетом выражений (4) и (5) определяется в соответствии с выражением:

что позволяет определить плотность распределения случайного вращения судна, не связанного какой-либо заданной последовательностью поворотов относительно осей, что повышает достоверность определения погрешности в местоположении измеренных глубин многолучевым эхолотом.
При этом при выполнении промерных работ с использованием многолучевого эхолота излучают звуковые сигналы, принимают отраженные сигналы, обрабатывают полученные сигналы (усиливают, формируют), определяют величины глубин при различных наклонах излучения с оценкой погрешности местоположения отраженного звукового импульса от дна с учетом случайного вращения судна, определяемой по значению плотности распределения случайного вращения судна в соответствии с зависимостью

Однако при решении прикладных задач, например, связанных со строительством подводных трубопроводов на больших глубинах, весьма важным является, чтобы все формы рельефа или искусственные подводные объекты были идентифицированы в ходе батиметрической инструментальной съемки по измеренным глубинам звуковыми сигналами, формируемыми, в частности, высокочастотными многолучевыми эхолотами для получения детальной картины рельефа дна.
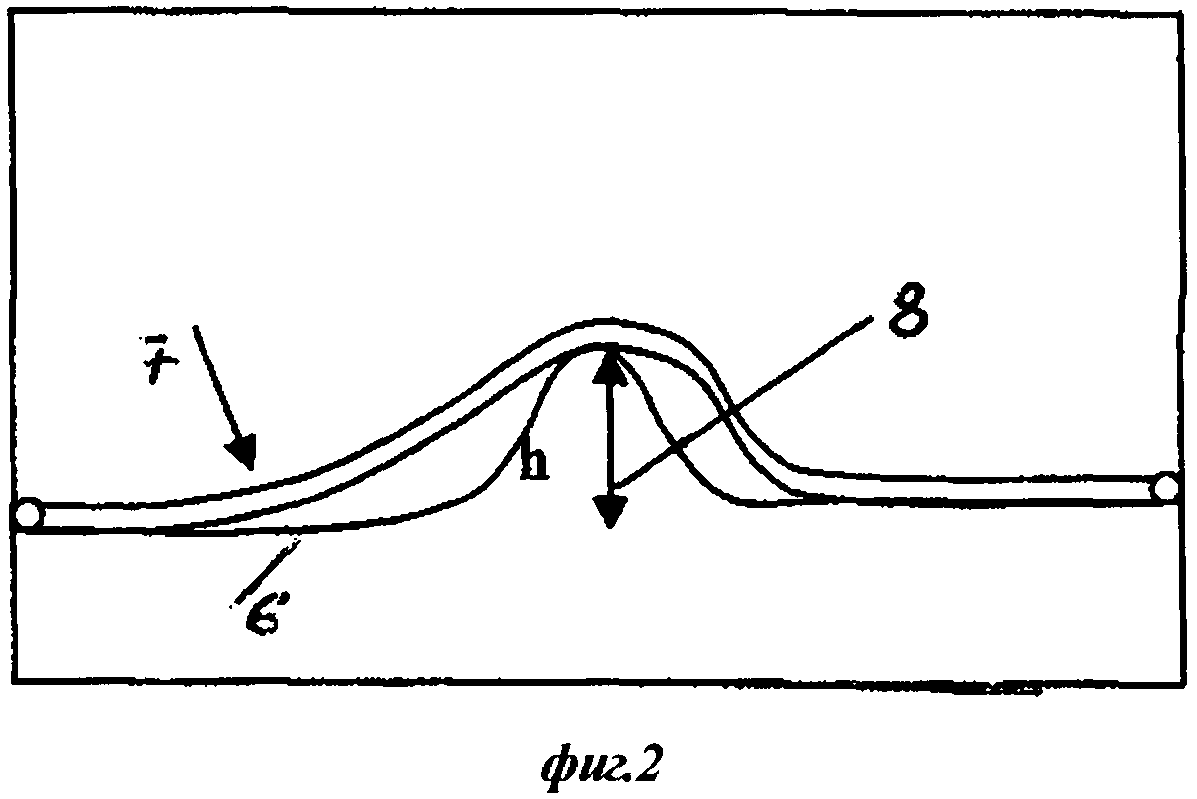
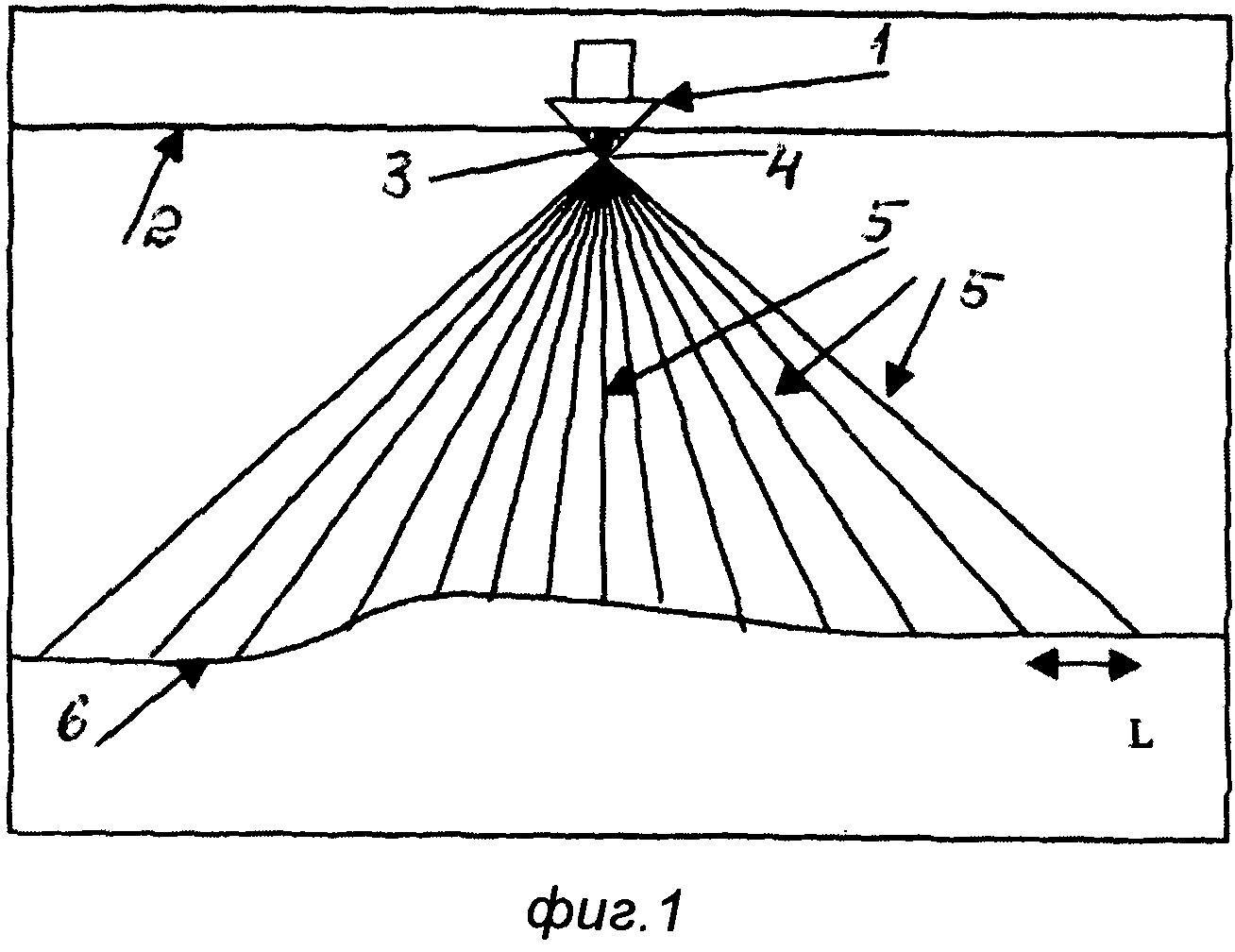
При съемке рельефа дна многолучевыми эхолотами глубины в горизонтальной плоскости измеряются (формируются) с определенной дискретностью, которая связана с углом направления луча, способом формирования лучей, частотой многолучевого эхолота, разрешающей способностью формирования луча. Причем эта дискретность является в общем случае функцией глубины L=f(H) (схема распределения измеренных глубин многолучевым эхолотом показана на фиг.1). Например, для высокочастотного многолучевого эхолота типа ЕМ 100, используемого при проведении батиметрической инструментальной съемки при проектных работах при прокладке подводных магистральных трубопроводов для транспортировки углеводородов, горизонтальная дискретность распределения глубин на равном расстоянии в мелководном режиме равна L=6,3% Н, где Н - глубина, при распределении глубин на равных углах это расстояние на боковых лучах увеличивается по сравнению с центральными лучами. Это приводит к тому, что при увеличении глубины съемки возможен пропуск опасной для трубопровода формы рельефа. С точки зрения проектирования параметров трубопровода пересечение трубопроводом такой опасной формы приводит к увеличению свободного пролета трубы и увеличению нагрузки в точке касания трубы с рельефом опасной формы (фиг.2). При проектировании параметров трубопровода основой является батиметрический профиль, и отсутствие фиксации на профиле опасной глубины в реальных условиях может приводить к превышению допустимых нагрузок на трубу и соответственно к ее повреждению, поэтому задача определения вероятности пропуска опасной формы рельефа при проведении батиметрической съемке является весьма актуальной. Задачей настоящего изобретения является повышение точности измерения глубины многолучевым эхолотом путем получения достоверных определений погрешности измерения.
Поставленная задача решается за счет того, что в способе определения местоположения измеренных глубин звуковыми сигналами, включающем излучение звуковых сигналов посредством многолучевого эхолота, прием отраженных сигналов, их обработку и определение величины глубин при различных наклонах излучения с определением погрешности в оценке местоположения отраженного сигнала от случайного вращения судна, в котором определение погрешности выполняют по значению плотности распределения случайного вращения судна в соответствии с зависимостью  где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси, в котором в отличие от прототипа, излучение звуковых сигналов посредством многолучевого эхолота осуществляют по 32 каналам, при приеме отраженных сигналов формируют 256 лучей, по архивным данным устанавливают местоположение локальных опасных форм рельефа, при определении значений глубины над локальными опасными формами рельефа, превышающими измеренные фоновые глубины, уменьшают дискретность измерений глубины в поперечном направлении путем сокращения полосы захвата, при выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы рельефа.
где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси, в котором в отличие от прототипа, излучение звуковых сигналов посредством многолучевого эхолота осуществляют по 32 каналам, при приеме отраженных сигналов формируют 256 лучей, по архивным данным устанавливают местоположение локальных опасных форм рельефа, при определении значений глубины над локальными опасными формами рельефа, превышающими измеренные фоновые глубины, уменьшают дискретность измерений глубины в поперечном направлении путем сокращения полосы захвата, при выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы рельефа.
Данная совокупность отличительных признаков, заключающихся в том, что излучение звуковых сигналов посредством многолучевого эхолота осуществляют по 32 каналам, при приеме отраженных сигналов формируют 256 лучей, по архивным данным устанавливают местоположение локальных опасных форм рельефа, при определении значений глубины над локальными опасными формами рельефа, превышающими измеренные фоновые глубины, уменьшают дискретность измерений глубины в поперечном направлении путем сокращения полосы захвата, при выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы рельефа, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого решения критерию патентоспособности - «изобретательский уровень».
Сущность способа поясняется чертежами (фиг.1-3).
Фиг.1. Схема распределения измеренных глубин многолучевым эхолотом. Судно 1, расположенное на поверхности моря 2, оснащенное многолучевым эхолотом 3, приемоизлучающая антенна которого установлена в днище 4 судна 1 и которая формирует лучи 5 в направлении морского дна 6; L - дискретность измерения глубины в поперечном направлении.
Фиг.2. Схема расположения трубопровода на опасной для его эксплуатации форме рельефа, где позициями обозначены: трубопровод 7, морское дно 6, форма опасного рельефа 8.
Фиг.3. Геометрия определения диаметра опасной формы рельефа дна. S - диаметр опасной формы рельефа дна, L - дискретность измерения глубины в поперечном направлении, h - высота опасной формы рельефа.
Многолучевой эхолот 3 представляет собой многолучевой эхолот со сложным линейно-частотным модулированным сигналом и предназначен для измерения глубин от 20 до 6000 м. Развертка мощности принятых сигналов осуществляется по дальности и углу. Характер изменения мощности в луче с дальностью зависит от формы рельефа дна. Из 32 приемных каналов формируют 256 лучей, что позволяет получить квазинепрерывный профиль рельефа. Приемная антенна многолучевого эхолота 3 диапазона частот 30 кГц состоит из 32 элементов.
Предлагаемый способ реализуется следующим образом.
Посредством многолучевого эхолота 3, установленного на судне 1, оснащенного техническими средствами навигации для определения скорости, курса, координат, углов качки, выполняют батиметрическую съемку, например, в интересах обеспечения выбора трассы для укладки подводного магистрального трубопровода для транспортировки углеводородов. При этом посредством многолучевого эхолота 3 формируют 32 луча в направлении морского дна 6. Принимают отраженные от морского дна 6 сигналы.
Посредством судовых средств обработки принятых сигналов определяют величины глубин Н. Транслируют эти величины глубин Н на видеопланшет для построения рельефа морского дна 6 по трассе движения судна 1. При этом по архивной информации выявляют районы с локальными опасными формами рельефа. При подходе к таким районам уменьшают дискретность измерений глубины в поперечном направлении путем сокращения полосы захвата.
При выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы в соответствии с зависимостью: S=2h/tg(a), где h - высота превышения фоновой глубины.
Определение погрешности в оценке местоположения отраженного сигнала от случайного вращения судна, в котором определение погрешности выполняют по значению плотности распределения случайного вращения судна в соответствии с зависимостью  , где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси.
, где: dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси.
Предлагаемый способ может быть реализован без привлечения внешних источников информации с использованием только штатных судовых средств: многолучевого эхолота с видеопланшетом, измерителей координат, скорости, курса, углов качек (система стабилизации, азимутгоризонткомпас или инерциальная навигационная система) и персональный компьютер, что позволяет сделать вывод о соответствии заявляемого решения критерию патентоспособности «промышленная применяемость».
Источники информации
1. Wiele T.V. Aspect of Accuracy Analis for Sounding. // The gidrographic journal. N95, 2000, 19-21 pp.
2. Hare R. Depth and position error budgets for multibeam echosounding. // JHR, v.72, N2, 1995, 37-69 pp.
3. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1978, 831 с.
4. Руководство по промерным работам
5. Кендалл, Моран П. Геометрические вероятности. М.: Наука, 1972, 192 с.
6. Патент RU №2266551.
Способ определения местоположения измеренных глубин звуковыми сигналами, включающий излучение звуковых сигналов посредством многолучевого эхолота, прием отраженных сигналов, их обработку и определение величины глубин при различных наклонах излучения с определением погрешности в оценке местоположения отраженного сигнала от случайного вращения судна, в котором определение погрешности выполняют по значению плотности распределения случайного вращения судна в соответствии с зависимостью , где dP - плотность распределения случайного вращения судна; θ - полярное расстояние; φ - долгота; δ - угол поворота судна вокруг оси, отличающийся тем, что излучение звуковых сигналов посредством многолучевого эхолота осуществляют по 32 каналам, при приеме отраженных сигналов формируют 256 лучей, по архивным данным устанавливают местоположение локальных опасных форм рельефа, при определении значений глубины над локальными опасными формами рельефа, превышающими измеренные фоновые глубины, уменьшают дискретность измерений глубины в поперечном направлении, путем сокращения полосы захвата, при выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы рельефа.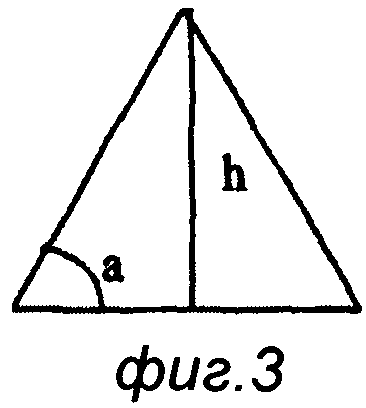

Способ определения предвестника землетрясения
Способ обнаружения подводных залежей газовых гидратов
Буй для определения характеристик морских ветровых волн
Способ повышения нефтеотдачи месторождения
Измеритель скорости
Судовая автоматизированная система регистрации данных телеметрического контроля
Устройство для защиты буровых объектов от разрушения при движении ледяных полей
Система микросейсмического зондирования земной коры и проведения сейсмического мониторинга
Способ автоматической проводки судна
Способ спутниковой коррекции автономных средств навигации подвижных объектов
Способ определения предвестника землетрясения
Способ обнаружения подводных залежей газовых гидратов
Буй для определения характеристик морских ветровых волн
Способ повышения нефтеотдачи месторождения
Измеритель скорости
Судовая автоматизированная система регистрации данных телеметрического контроля
Устройство для защиты буровых объектов от разрушения при движении ледяных полей
Система микросейсмического зондирования земной коры и проведения сейсмического мониторинга
Способ автоматической проводки судна
Способ спутниковой коррекции автономных средств навигации подвижных объектов

