Результат интеллектуальной деятельности: СПОСОБ ПЕРЕОРИЕНТАЦИИ И УПРАВЛЕНИЯ ТЯГОЙ ВРАЩАЮЩЕГОСЯ КОСМИЧЕСКОГО АППАРАТА С СОЛНЕЧНЫМ ПАРУСОМ
Вид РИД
Изобретение
Область техники
Изобретение относится к двигательным системам космических аппаратов (КА) и может быть использовано в маневрировании КА с солнечным парусом для лучшего управления его тягой.
Уровень техники
В плане независимости процесса переориентации поверхности солнечного паруса в пространстве от действия сил солнечного давления ближайшим аналогом (прототипом) предлагаемого способа можно считать изобретение по Авторскому свидетельству СССР №1758988 (опубл. 20.08.1995, бюл. №23), в котором изменение угла ориентации КА с солнечным парусом в пространстве происходит за счет изменения параметров вращения КА, точнее за счет взаимного «излома» осей вращения двух шарнирно соединенных частей КА.
Однако в прототипе требуется изменение углов ориентации паруса на малую величину (порядка нескольких угловых минут), что является очевидным ограничением изобретения. Также в прототипе описан парус в виде вращающегося сплошного диска или из отдельных, но связанных по кромкам лопастей. Такой парусник предполагает наличие большого маховика, и конструкция получается достаточно сложной. Мало того, что она сложная с точки зрения роспуска паруса, так еще и конструкция и управление движением самого КА сложные, поскольку есть маховик, вращающийся в противоположную солнечному парусу сторону.
В настоящее время одним из наиболее перспективных вариантов конструкции КА с солнечным парусом является конструкция типа Гелиоротор, описанная в монографии [Поляхова Е.Н. Космический полет с солнечным парусом. М.: Наука, 1986, с.137-141], конструкция которого представляет собой совокупность светоотражающих лопастей, расположенных радиально по отношению к оси вращения космического аппарата. В американском варианте этот тип КА представлен, например, проектом аппарата Heliogyro [Richard В. Solar blade nanosatellite development: Heliogyro deployment, dynamics, and control. 13th Annual AIAA/USU Conference о Small Satellites] с четырехлопастным роторным солнечным парусом, - это вращающийся малый КА с четырьмя светоотражающими с обеих сторон лопастями в виде армированных лент, расположенных в плоскости вращения с углом 90 градусов между осями их симметрии.
В монографии Поляховой Е.Н. со ссылкой на экспертов NASA говорится, что Гелиоротор - это один из перспективных вариантов. У проекта Гелиоротора и у других парусов роторного типа есть несомненное преимущество - это большая величина парусности - отношения площади к массе. Это основной показатель возможностей паруса. Для парусов с каркасом парусность существенно меньше. А в роторном парусе каркаса у паруса нет, и по показателю парусности роторная схема более перспективна.
При традиционном подходе к переориентации КА роторного типа с солнечным парусом за счет сил светового давления на парус для перенацеливания оптических и радиоустройств на борту КА угол разворота и особенно быстродействие (несколько часов на время поворота) оказываются малыми, поскольку переориентация происходит под действием сил светового давления, также являющихся малыми, а переориентация крупногабаритной конструкции, стабилизированной устойчивым вращением, затруднительна в принципе.
Раскрытие изобретения
Задача изобретения - устранение этих ограничений и недостатков.
Техническим результатом изобретения является возможность переориентации КА в пространстве независимо от солнечного светового воздействия (давления), а также изменение ориентации в пространстве лопастей солнечного паруса за счет управляемого изменения соотношений величин главных моментов инерции КА с солнечным парусом относительно его главных ортогональных осей.
Технический эффект достигается тем, что изменение ориентации исходно устойчиво вращающегося космического аппарата и соответственно вектора тяги его солнечного паруса на требуемый угол производят посредством временной потери устойчивости мгновенной оси вращения космического аппарата и восстановления этой устойчивости при переориентации мгновенной оси вращения на требуемый угол относительно исходного положения. Потеря устойчивости происходит за счет управляемой смены соотношений величин трех главных моментов инерции космического аппарата с солнечным парусом относительно его трех главных ортогональных осей, одна из которых совпадает с осью исходно устойчивого вращения космического аппарата. Причем для потери устойчивости мгновенной оси вращения исходно максимальный по величине среди трех главных моментов инерции момент инерции относительно оси исходно устойчивого вращения космического аппарата временно и управляемо делают средним по величине моментом инерции среди трех главных моментов инерции. А при переориентации космического аппарата на требуемый угол для восстановления устойчивости величину указанного главного момента инерции снова делают максимальной среди трех величин главных моментов инерции. Причем изменение моментов инерции осуществляют путем перераспределения масс аппарата относительно соответствующих осей в радиальном направлении.
Теоретико-практическими предпосылками основных приемов предлагаемого способа являются уравнения Эйлера движения твердого тела и вторая интерпретация Пуансо вращения твердого тела по инерции в пустоте, описанные в теоретической механике, а также связанный с этим практический эффект космонавта Джанибекова («гайка Джанибекова»).
Космический аппарат с солнечным парусом относится к роторному типу и имеет три главные взаимно ортогональные оси: ось исходного устойчивого вращения космического аппарата, общая продольная ось двух одинаковых лопастей паруса, плоско вытянутых под действием центробежных сил от устойчивого вращения космического аппарата, общая ось перераспределяемых масс, в том числе грузов, управляемо перемещаемых синхронно, радиально, зеркально одинаково относительно общего центра трех главных осей. В исходном устойчивом состоянии вращения космического аппарата вокруг первой главной оси перемещаемые грузы управляемо и одинаково раздвинуты так, что величина главного момента инерции космического аппарата с солнечным парусом относительно первой главной оси является максимальной среди величин трех главных моментов инерции. Для временной потери устойчивости мгновенной оси вращения перемещаемые грузы управляемо одинаково сдвигают к центру оси так, чтобы величина главного момента инерции относительно первой главной оси стала средней среди величин трех главных моментов инерции. А при переориентации космического аппарата на 180 или 90 градусов для восстановления устойчивости мгновенной оси вращения грузы снова раздвигают на требуемое для этого диаметральное расстояние.
Вариант конструкции КА с солнечным парусом роторного типа (Гелиоротор) является наиболее подходящим для реализации предлагаемого способа, так как есть вращающиеся лопасти солнечного паруса, можно поставить перемещаемые грузы и т.д. При этом солнечный парус из двух вращающихся лопастей еще не рассматривался (было 4, 6, 12 лопастей), а поэтому никто не думал о новом способе переориентации солнечного парусника.
При этом с учетом необходимости натяжения гибких лопастей солнечного паруса под исключительным действием центробежных сил вращения для роторного КА имеет смысл рассматривать переориентации КА только на 180 или 90 градусов относительно исходного положения устойчивого вращения КА. При других углах переориентации КА в отсутствие потребных центробежных сил лопасти потеряют свое натяжение и перестанут выполнять свою рабочую функцию.
Что касается переориентации только вектора тяги солнечного паруса (отдельно от ориентации самого космического аппарата), то осредненное по времени изменение ориентации вектора тяги солнечного паруса на промежуточный угол в диапазоне от 0 до 180 градусов производят за счет осредненного по времени действия солнечного света на обе стороны плоского паруса, которые по требуемым временным соотношениям циклически меняют свою ориентацию вместе с космическим аппаратом на 180 или 90 градусов относительно исходной ориентации. При этом одна сторона солнечного паруса выполнена со светоотражающей, а другая - со светопоглощающей поверхностью.
Перечень фигур:
На фиг.1 представлен общий вид и исходное устойчивое положение космического аппарата с двухлопастным солнечным парусом и перемещаемыми грузами, функционирующего в соответствии с предлагаемым способом;
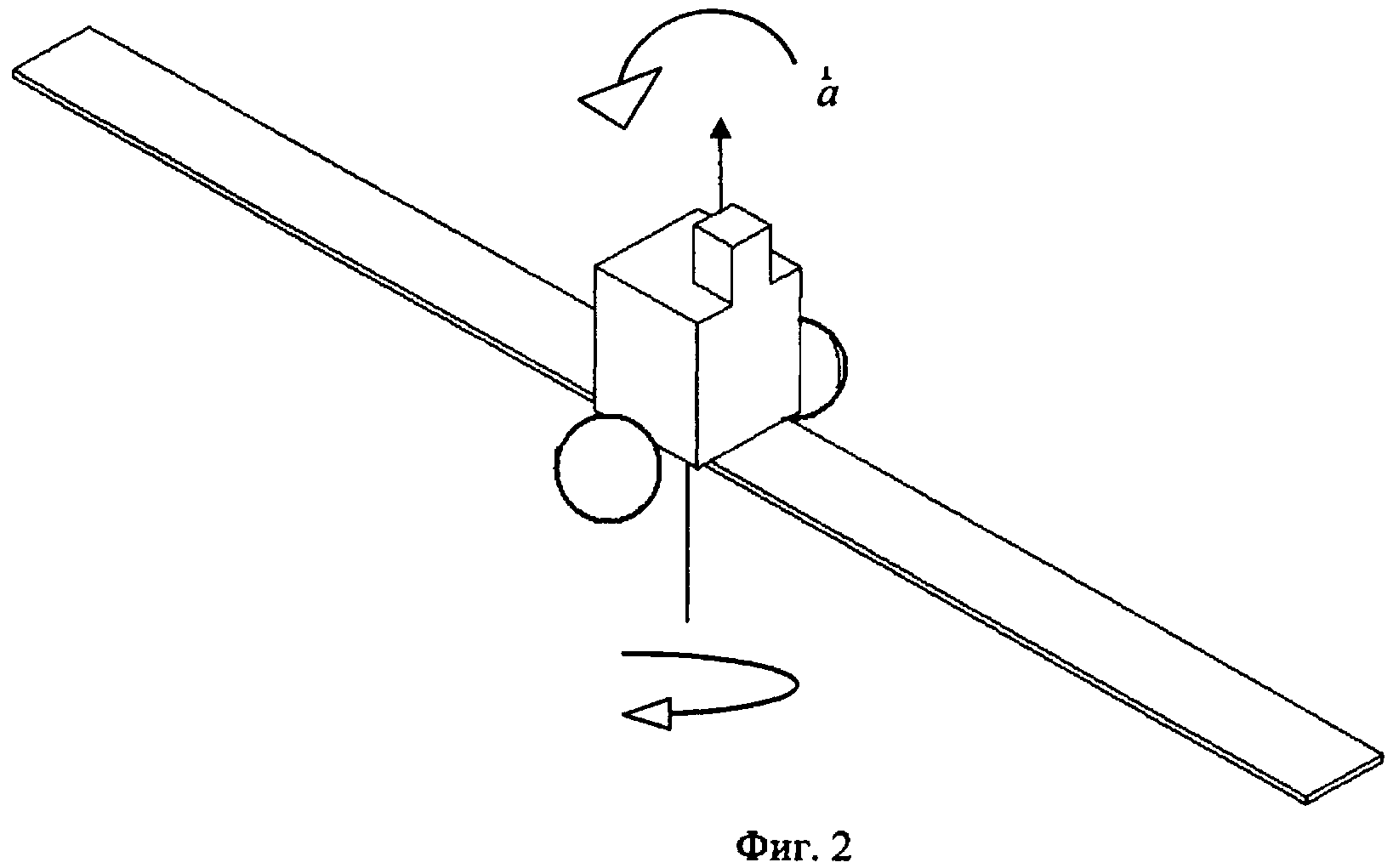
на фиг.2, 3 показана последовательность переориентации космического аппарата на 180 градусов;
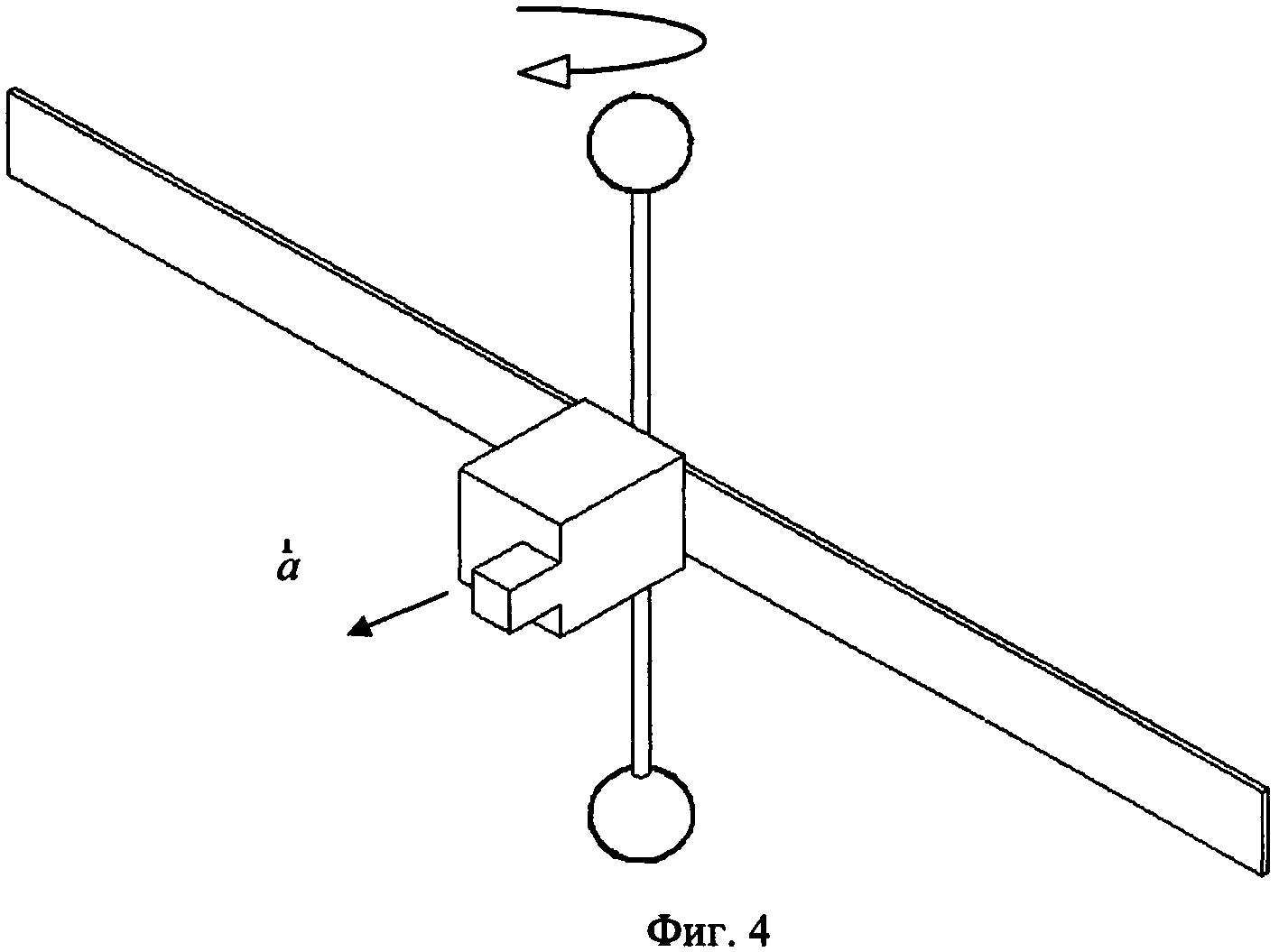
на фиг.4 показано положение космического аппарата с солнечным парусом после переориентации на 90 градусов относительно исходного положения;
на фиг.5, 6 - графики имитационного моделирования изменения угла ориентации КА на 180 и 90 градусов соответственно.
Осуществление изобретения
Схема космического аппарата с солнечным парусом, осуществляющего способ переориентации и управления тягой за счет перераспределения соотношений моментов инерции относительно главных ортогональных осей с помощью перераспределения масс, в том числе перемещения грузов, показан на фиг.1. Космический аппарат имеет две светоотражающие лопасти 4, а также две раздвижные штанги 2, способные изменять свою длину под действием приводных устройств. На концах раздвижных штанг 2 установлены грузы 3. На космическом аппарате жестко установлена аппаратура 5, ориентация которой задана вектором  . Ось OZ ориентирована нормально к плоскости светоотражающих лопастей, ось ОХ совпадает с общей продольной осью лопастей солнечного паруса, ось OY образует с осями ОХ и OZ ортогональную систему.
. Ось OZ ориентирована нормально к плоскости светоотражающих лопастей, ось ОХ совпадает с общей продольной осью лопастей солнечного паруса, ось OY образует с осями ОХ и OZ ортогональную систему.
Способ можно реализовать следующим образом.
Космический аппарат 1 изначально приведен во вращение вокруг своей оси (ось OZ), при этом штанги 2 с грузами 3 выдвинуты на максимальную длину, момент инерции вокруг оси OZ является максимальным из всех трех главных моментов инерции, и поэтому положение оси вращения и ориентация космического аппарата в пространстве являются устойчивыми.
При уменьшении длины штанг с грузами (фиг.2) момент инерции относительно оси OZ уменьшается и становится средним среди величин трех главных моментов инерции, при этом система становится неустойчивой, и космический аппарат 1 переворачивается так, что направление вектора  , определяющего направление ориентации аппаратуры 5, оказывается изменено на угол 180 градусов по отношению к первоначальной ориентации. При этом штанги 2 снова раздвигают на максимум, и ориентация космического аппарата вновь становится устойчивой (фиг.3).
, определяющего направление ориентации аппаратуры 5, оказывается изменено на угол 180 градусов по отношению к первоначальной ориентации. При этом штанги 2 снова раздвигают на максимум, и ориентация космического аппарата вновь становится устойчивой (фиг.3).
При необходимости поворота светоотражающей поверхности лопастей на угол 90 градусов (например, для управления изменением величины тяги до нуля, если изначально направление солнечных лучей было нормально светоотражающей поверхности) система работает по следующей схеме. Уменьшение длины штанг, как и в предыдущем случае, приводит к неустойчивости ориентации космического аппарата. Космический аппарат поворачивается так, что направление вектора  перестает совпадать с направлением оси вращения, однако длину штанг увеличивают до момента времени, когда угол между осью вращения и вектором
перестает совпадать с направлением оси вращения, однако длину штанг увеличивают до момента времени, когда угол между осью вращения и вектором  станет равен 90 градусов. В результате система переходит в новое устойчивое состояние с ориентацией вектора
станет равен 90 градусов. В результате система переходит в новое устойчивое состояние с ориентацией вектора  под углом 90 градусов по отношению к оси вращения (фиг.4). При этом плоскость светоотражающих лопастей оказывается также ориентирована под углом 90 градусов по отношению к первоначальной ориентации.
под углом 90 градусов по отношению к оси вращения (фиг.4). При этом плоскость светоотражающих лопастей оказывается также ориентирована под углом 90 градусов по отношению к первоначальной ориентации.
Ориентация КА (его оси вращения) и ориентация вектора тяги от солнечного давления на парус - это разные вещи. Вектор тяги может поменять ориентацию как угодно, а КА с бортовой аппаратурой и солнечным парусом (жестко закрепленными к корпусу КА) должен быть ориентирован только на угол 0 (исходное положение), либо 180, либо 90 градусов, чтобы вращающиеся гибкие лопасти всегда были перпендикулярны оси вращения и от этого вытянуты (или натянуты) под действием центробежных сил. При этом осредненное по времени изменение ориентации вектора тяги солнечного паруса на промежуточный угол в диапазоне от 0 до 180 градусов производят за счет осредненного по времени действия солнечного света на обе стороны плоского паруса, которые по требуемым временным соотношениям циклически меняют свою ориентацию вместе с космическим аппаратом на 180 или 90 градусов относительно исходной ориентации. Одна сторона солнечного паруса выполнена со светоотражающей (зеркальной), а другая - со светопоглощающей (черной) поверхностью, чтобы на разные стороны паруса по-разному действовал солнечный свет, и таким образом, по-разному формировался осредненный вектор тяги паруса от солнечного давления.
Пример имитационного моделирования реализации способа
Модель КА типа гелиоротор с параметрами:
угловая скорость вращения относительно оси OZ ω=1 рад/с, при величинах главных моментов инерции:
Iz=245200630 кг·мм2; Iу=245200227 кг·мм2; Ix=640 кг·мм2.
величина главного момента инерции Iz является максимальной из всех трех величин и поэтому ось вращения КА находится в устойчивом состоянии, однако при следующем управляемом изменении величин главных моментов инерции:
Iz=245200270 кг·мм2, Iу=245200427 кг·мм2; Ix=480 кг·мм2.
величина момента инерции Iz из максимальной становится средней среди трех величин, из-за этого устойчивость мгновенной оси вращения КА пропадает и происходит его переориентация:
на угол 180 градусов - за 18 секунд (см. фиг.5);
на угол 90 градусов - за 15 секунд (см. фиг.6).
При достижении требуемого угла переориентации снова управляемо устанавливают устойчивое состояние вращения КА за счет установления исходного соотношения величин главных моментов инерции.




Устройство воспламенения образца твердого ракетного топлива и способ воспламенения с его использованием
Способ лечения пациентов со сниженной высотой лица и деформацией окклюзионной плоскости
Двигатель на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите
Способ высокочастотной обработки конструктивно-сложных изделий из полимерных материалов
Способ неинвазивной дифференциальной диагностики заболеваний органов дыхательной системы и устройство для его осуществления
Способ контроля для функциональной реконфигурации вычислительной системы

