СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ТЕКУЧЕЙ СРЕДЫ В ПОЛЕЗНУЮ РАБОТУ И УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ТЕКУЧЕЙ СРЕДЫ В ПОЛЕЗНУЮ РАБОТУ
Вид РИД
Изобретение
Изобретения относятся к области энергетики и могут использоваться для превращения кинетической энергии движущегося потока текучей среды, такой как ветер, вода, движущаяся в ручье, реке, в океанском течении, приливах или в направленном потоке в полезную работу, а именно для выработки электроэнергии с использованием явления флаттера, а также для преобразования механической (электрической) энергии двигателя в полезную работу движения транспортных средств или текучей среды.
Поиск эффективных средств превращения возобновляемых энергетических ресурсов в полезную работу включает механические ветряные двигатели (ветрогенераторы), превращающие кинетическую энергию ветра в механическую энергию с использованием подъемных сил или сил лобового сопротивления, и механические гидравлические турбины (гидрогенераторы), превращающие кинетическую энергию текущей воды или потенциальную энергию поднятой на высоту запасенной воды в механическую энергию. В большинстве случаев преобразуемая таким образом энергия превращается в электрическую мощность для окончательного распределения и использования.
Недостатками существующих ветрогенераторов и гидрогенераторов являются низкий коэффициент полезного действия, связанный с потерями на турбулизацию воздушного или водного потока за рабочими элементами (РЭ), или неэффективной кинематикой движения РЭ; ограниченный диапазон скоростного напора воздушного или водного потока; наличие опрокидывающего момента и связанных с этим трудностей при монтаже ветрогенераторов и гидрогенераторов; экологические проблемы, связанные со строительством и эксплуатацией ветрогенераторов (высокочастотные шумы, радиопомехи, нарушение экосистемы) или гидрогенераторов (плотины, дамбы, нарушение экосистемы).
Преобразование кинетической энергии потока в электрическую энергию с помощью преобразователей пропеллерного типа (ветрогенераторы, гидротурбины) во всем мире признано неэффективным (85% кинетической энергии потока расходуется на турбулизацию потока и только 15% идет на полезную работу), экологически небезопасны (так называемые «мертвые» зоны за вращающимися лопастями, экологические проблемы) и очень дорогие (особенно при строительстве гидротехнических сооружений, дамб и плотин). Во всем мире использование любых возобновляемых источников энергии является убыточным и дотационным. Вместе с тем такие источники возобновляемой энергии, как океанские течения или прибой, пока что вообще не поддаются использованию, хотя энергетический потенциал у этих источников огромен. Поэтому идет усиленный поиск более эффективных возобновляемых источников энергии.
Существует целый ряд технических решений в этой области (патент US 4184805, 09.03.1978 г., патент US 4347036, опубл.1982 г., патент РФ 2037641, 14.08.1991 г., патент РФ 2362907, 01.06.2006 г. (WO 2006/130719 20061207), в основу которых положено использование явления флаттера для получения дополнительной электрической энергии.
Использование явления флаттера вызвано желанием получить из потока любой текучей среды дополнительную энергию, которая всегда сопровождает возникновение флаттера, причем величина этой энергии может быть очень существенной (в считанные секунды приводящая к резкому росту динамических нагрузок и к разрушению работающих конструкций, таких как самолеты или теплообменные аппараты). И если найти способ использования этой дополнительной энергии, можно получить очень эффективный источник получения электрической энергии. Поэтому многие разработчики и пытаются работать с флаттером, при возникновении которого появляется дополнительная энергия, которую можно использовать для получения электрической энергии.
Известны способ преобразования кинетической энергии потока текучей среды в полезную работу и устройство для его осуществления (см. патент РФ №2362907, (публикация РСТ: WO 2006/130719 20061207), МПК F03D 5/06, опубл.27.07.2009 г.), в котором описан способ, включающий размещение консольно установленных РЭ (каскада крыльев) в потоке текучей среды в условиях взаимодействия с потоком текучей среды, при этом РЭ устанавливают с, по меньшей мере, двумя степенями свободы и подают поток текучей среды для прохождения через каскад РЭ и возбуждения резонансных вынужденных флаттерных колебаний, усовершенствования включают установку каждого РЭ с помощью индивидуального подвесного стержня навесным способом и поддержание всех указанных подвесных стержней параллельно друг другу; поддерживают вертикальность и параллелизм упомянутых РЭ, которые достигаются с помощью монтажных средств обеспечения вращательного и поступательного движения при жестком удерживании РЭ вертикальными и параллельными с помощью двухопорной подвески каждого крыла; РЭ соединены через указанные подвесные стержни с гидравлическим приводом, посредством которого осуществляют мгновенное управление позиционированием указанных РЭ (крыльев) по смещению и углу наклона с помощью внешнего контроллера для обеспечения точно противофазного движения соседних РЭ и передачи вырабатываемой энергии от колеблющихся РЭ к аккумулятору; передачу движения упомянутым РЭ осуществляют с помощью гидравлического привода для передачи энергии от них к устройству для отбора мощности (аккумулятору); кроме того, осуществляют гидравлическое управление передачей указанной энергиии от гидравлического привода к аккумулятору; обеспечивают возможность преобразования энергии в электрическую мощность; управляют РЭ путем создания циклических восстанавливающих сил и инерционной массы для возбуждения и поддержания резонансных вынужденных колебаний флаттера указанных РЭ; для реализации описанного способа используется устройство, содержащее консольно установленные РЭ, имеющие возможность размещения в потоке текучей среды для обеспечения по меньшей мере двух степеней свободы, а также средства подачи указанного потока текучей среды для прохождения через РЭ, множество подвесных стержней, причем каждый РЭ установлен на индивидуальном подвесном стержне в форме консоли параллельно друг другу с помощью средств их поддержания в таком положении; кроме того, устройство может содержать гибкий элемент, который является деформируемым под действием давления, создаваемого указанным потоком текучей среды, присоединен к РЭ и проходит вдоль его задней кромки; возможен вариант устройства, при котором каждый РЭ является самостоятельным и не связан с соседними для минимизации лобового сопротивления и вихреобразования; при другом варианте исполнения устройства монтажные средства для поддержания РЭ объединены в одно целое с образованием легкосъемных и отсоединяемых модулей, где каждый модуль является съемным и заменяемым без прекращения работы соседнего крыла; устройство может включать двусторонний вращательный исполнительный механизм контроля угла наклона, расположенный внутри двустороннего линейного исполнительного механизма и насоса таким образом, что движение одного или многих РЭ, соединенных с указанным модулем исполнительного механизма и насоса с помощью одного из упомянутых подвесных стержней, обеспечивает независимое и одновременное движение как по поперечной, так и по вращательной осям; РЭ могут быть выполнены с закругленными концевыми участками на переднем крае для минимизации лобового сопротивления, закрылки, сформированные на их концах; деформируемый гибкий отдел выполнен вдоль по меньшей мере задней кромки для изменения их кривизны при предельных углах наклона крыла.
Основным недостатком данного изобретения является низкая эффективность преобразования кинетической энергии потока в полезную работу, связанная с малой величиной амплитуды колебаний РЭ, ограниченной возможностью возникновения вынужденных резонансных колебаний соседних РЭ, обусловленных расстояниями между соседними РЭ, при оптимальной величине которых появляется возможность возникновения условий резонансного колебания всех РЭ (при наличии и других составляющих, таких как плотность и критическая скорость потока, совпадение собственных частот колебаний РЭ с частотными характеристиками потока, упругие свойства материала, условия закрепления, наличие внешних возмущений и т.д.). Низкая эффективность преобразования обусловлена также потерями кинетической энергии потока текучей среды (или потерей скорости потока на выходе из устройства по сравнению со скоростью потока на входе в устройство), связанными с турбулизацией потока при его взаимодействии с колеблющимися РЭ, потерями, связанными с частичным использованием полученной полезной работы на демпфирование энергии движения поршней каждого РЭ при остановке поршней и смене направления движения, на поддержание параллельности каждого РЭ, на установку и поддержание противофазного движения соседних РЭ, на создание циклических восстанавливающих сил для возбуждения и поддержания резонансных колебаний.
Законы вращательных и возвратно-поступательных перемещений каждого РЭ зависят от нестационарных аэродинамических / гидродинамических сил и моментов, возникающих при взаимодействии колеблющихся РЭ с потоком текучей среды, поэтому эти перемещения не являются гармоническими, законы их разные, нет повторяемости этих перемещений во времени, их можно только контролировать, но ними практически невозможно управлять.
Недостатками описанного изобретения является также неустойчивость и сложность контроля предлагаемой колеблющейся резонансной системой, постоянно требующей внешних возмущающих сил для возбуждения и поддержания резонансных колебаний, требующей постоянной подстройки, подналадки и регулировки каждого параметра каждого колеблющегося РЭ как по вращательным перемещениям, так и по возвратно-поступательным перемещениям.
Падение кинетической энергии потока за РЭ, обусловленное турбулизацией потока при его взаимодействии с колеблющимися РЭ в случае возбуждения резонансных возмущений, делает невозможным наращивание снимаемой электрической мощности за счет размещения дополнительных РЭ или устройств перед рассматриваемыми РЭ или за ними.
Известны также наиболее близкие по конструктивным особенностям к заявляемым устройство преобразования кинетической энергии потока текучей среды в полезную работу и реализуемый при его работе способ преобразования кинетической энергии потока текучей среды в полезную работу (патент DE 3616350 A1 (VOGEL EDWARD) 19.11.1987). В отличие от описанных выше в аналогах технических решений выработка электроэнергии в этом устройстве происходит без использования положительного влияния явления флаттер.
Способ преобразования кинетической энергии потока текучей среды в полезную работу включает размещение РЭ в потоке текучей среды в условиях взаимодействия с потоком текучей среды и одновременное сообщение РЭ гармонических вращательных и возвратно-поступательных перемещений, при этом используют РЭ, представляющий собой жесткую рамную конструкцию в виде горизонтальной двухопорной балки, его закрепляют на концах двух шатунов, связанных в средней части с ползунами и жесткими стойками, а противоположными концами с коленчатым валом, возвратно-поступательные перемещения РЭ осуществляют по эллиптическим траекториям, направление возвратно-поступательных перемещений оси соединения средней части шатуна с ползуном производят в плоскости, перпендикулярной направлению движения потока, а вращательные перемещения РЭ осуществляют относительно оси соединения средней части шатуна с ползуном.
Реализующее описанный способ устройство преобразования кинетической энергии потока текучей среды в полезную работу выполнено одно- или многомодульным, каждый отдельный модуль которого содержит имеющий возможность размещения в потоке текучей среды РЭ, установленный на неподвижном основании и неподвижно закрепленный на двух шатунах кривошипно-шатунных механизмов, ползуны которых соединены с шатунами при помощи осей и имеют возможность совершать возвратно-поступательные перемещения по направляющим, а шатуны шарнирно соединены с кривошипами, неподвижно связанными с коленчатым валом, который, в свою очередь, шарнирно связан с неподвижным основанием и предназначен для передачи энергии вращения кривошипа на устройство для отбора мощности, при этом РЭ представляет собой жесткую рамную конструкцию в виде горизонтальной двухопорной балки, закрепленной на двух шатунах, связанных в средней части жесткими стойками, а противоположными концами с коленчатым валом; РЭ имеет возможность осуществления вращательных перемещений относительно осей соединения средних частей шатунов с ползунами; РЭ имеет возможность возвратно-поступательных перемещений по эллиптическим траекториям; направление возвратно-поступательных перемещений осей соединения средних частей шатунов с ползунами происходит в плоскости, перпендикулярной направлению движения потока.
Авторы описаного изобретения сделали ставку на преобразование кинетической энергии потока воздуха в электрическую энергию только за счет аэродинамической подъемной силы, исключив всякую возможность возникновения флаттера. К решению вопроса преобразования кинетической энергии потока в полезную работу они подошли только с позиции аэродинамики, игнорируя нестационарные аэродинамические процессы и теорию вынужденных колебаний. За счет увеличения механического демпфирования всей конструкции (закрепление РЭ на двух жестких опорах, связанных в жесткую рамную конструкцию) авторы этого изобретения существенно повысили механическое демпфирование колеблющейся системы, гарантированно исключив любую возможность возникновения флаттера. А возможность использования явления резонанса в колебательной системе авторы исключили путем введения в способ действия ограничений на увеличение амплитуд возвратно-поступательных колебаний РЭ (любое увеличение амплитуд возвратно-поступательных колебаний РЭ приводит к существенному увеличению металлоемкости всей конструкции) и периодическим изменением на 12° угла сдвига фаз между возмущающей силой и перемещением (при резонансных колебаниях угол сдвига фаз равняется строго 90°).
Основным недостатком данного изобретения является низкая эффективность преобразования кинетической энергии потока текучей среды в полезную работу, связанная, во-первых, с периодическим движением РЭ против направления движения текучей среды, что снижает кпд устройства; во-вторых, с использованием для осуществления положительной работы только аэродинамической подъемной силы, возникающей также периодически и зависящей от профиля РЭ и очень узкого скоростного диапазона потока, что также снижает кпд устройства; в-третьих, малыми амплитудами колебаний, зависящими от угла атаки РЭ (максимально 12°), геометрических параметров передающих механизмов и назначения изобретения (малые габариты и малая площадь, занимаемая устройством).
Существенными недостатками изобретения являются также большая металлоемкость устройства, обусловленная длиной шатунов, значительным смещением центра колеблющихся масс и, самое главное, периодически возникающими динамическими ударами и рывками, вызванными периодически изменяющимися направлениями движения РЭ относительно направления движения потока и периодическими изменениями точек приложения аэродинамической подъемной силы на поверхности РЭ. Для удержания всей конструкции в работоспособном состоянии необходима массивная поворотная опора, призванная также служить для предотвращения от опрокидывания в случае возникновения порывистых или шквальних ветров, что особенно актуально именно при размещении устройства на крышах домов. Особенно актуален данный вопрос при вертикальном расположении коленчатого вала. Но размещение массивного работающего изделия, испытывающего значительные переменные динамические нагрузки при его работе, категорически недопустимо на крышах домов, особенно высотных, и является еще одним существенным недостатком устройства по прототипу.
Следующим существенным недостатком описанного устройства является образование вихрей текучей среды при воздействии аэродинамической подъемной силы на любую конструкцию (или часть конструкции). Мало того, что это явление дополнительно уменьшает эффективность преобразования кинетической энергии потока в полезную работу, так как часть энергии потока тратится именно на образование вихрей, но при вертикальном расположении коленчатого вала, периодический срыв вихрей с рабочих элементов, расположенных по потоку первыми, вызывает хаотичные неуправляемые вибрации на рабочих элементах, расположенных по потоку вторыми (так называемый бафтинг), что также ведет к снижению коэффициента полезного действия этого устройства. Кроме того, турбулизация потока текучей среды приводит к потере его кинетической энергии, росту сопротивления и возникновению опрокидывающего момента, предотвращение которого также приводит к увеличению габаритов и веса поворотной опоры.
Техническими эффектами предлагаемых способа и устройства преобразования кинетической энергии потока текучей среды в полезную работу, объединенных единым изобретательским замыслом, является возможность выработки электроэнергии путем создания самовозбуждающихся автоколебаний типа «флаттер» и использования положительной работы нестационарных аэродинамических сил и моментов (нестационарных аэродинамических воздействий НАВ), возникающих при взаимодействии устройства как с одним колеблющимся РЭ, так и со множеством РЭ, кроме этого выравнивается скорость рабочего потока на входе и на выходе из устройства, и, как следствие, отсутствует опрокидывающий момент, вследствие чего появляется возможность получения электрической энергии из любого потока текучей среды практически без потери кинетической энергии самого потока, без нарушения экологичности системы в месте монтажа устройства, без строительства сложных гидротехнических или монтажных сооружений, снижение металлоемкости устройства, возможность наращивания мощности устройства за счет присоединения дополнительных РЭ или дополнительных аналогичных устройств к работающему устройству непосредственно перед ним или за ним, т.е. повышение мощности и коэффициента полезного действия устройства, а также повышение надежности работы устройства в целом.
Для получения этих технических эффектов в способе преобразования кинетической энергии потока текучей среды в полезную работу, включающем размещение РЭ в потоке текучей среды в условиях взаимодействия с потоком текучей среды и одновременное сообщение РЭ гармонических вращательных и возвратно-поступательных перемещений, согласно изобретению РЭ закрепляют в потоке текучей среды консольно с возможностью фиксированного поворота и вращательного перемещения относительно оси, на которой их закрепляют, совпадающей с осью соединения ползуна с шатуном, а возвратно-поступательные перемещения РЭ осуществляют в направлении, перпендикулярном направлению перемещения потока и совпадающем с вектором нормальной составляющей движущей силы потока, результирующая составляющая которой направлена перпендикулярно боковой поверхности РЭ, при оптимальном варианте реализации этого способа вращательные и возвратно-поступательные перемещения РЭ осуществляют относительно оси их консольного закрепления со сдвигом по фазе; этот способ может быть реализован с помощью устройства, выполненного одно- или многомодульным, каждый отдельный модуль которого содержит имеющий возможность размещения в потоке текучей среды РЭ, установленный на неподвижном основании на шатуне кривошипно-шатунного механизма, ползун которого соединен с шатуном при помощи оси и имеет возможность совершать возвратно-поступательное перемещение по направляющей, а шатун шарнирно соединен с кривошипом, шарнирно связанным с валом, который, в свою очередь, шарнирно связан с неподвижным основанием и предназначен для передачи энергии вращения кривошипа на устройство для отбора мощности, в котором согласно изобретению каждый РЭ выполнен в виде консоли и установлен с возможностью фиксированного поворота и вращательного перемещения относительно оси, на которой он закреплен, совпадающей с осью соединения ползуна с шатуном, при наилучших вариантах выполнения устройства при выполнении его многомодульным оси закрепления РЭ имеют возможность перемещения в одной плоскости; модули кинематически связаны между собой и имеют возможность работы со сдвигом фаз; кроме того, кинематическая связь между модулями может быть осуществлена при помощи передаточных механизмов, размещенных на валу с одной из сторон относительно неподвижного основания, а также оно может быть снабжено поджимным соплом и диффузором, которые установлены, соответственно, перед РЭ и за РЭ по ходу движения потока.
Вследствие реализации предлагаемых совокупностей признаков при использовании заявляемого устройства в качестве ветрогидроэлектростанции электрическая энергия вырабатывается из потока воды или воздуха практически без изменения характеристик самого потока. При неизменности кинетической энергии самого потока получаемая электрическая энергия эквивалентна приблизительно 30% кинетической энергии потока (при кпд=30%). Цифра приведена по результатам испытаний в воздушном и водном потоках, испытания проведены как на лабораторной модели, так и на образце опытной промышленной установки. При реализации предлагаемого способа преобразования кинетической энергии потока текучей среды в полезную работу и устройства для его осуществления происходит гарантированное перемещение РЭ при взаимодействии с потоком текучей среды в режиме автоколебаний типа флаттер. Управление режимом этих автоколебаний осуществляется благодаря созданию оптимальных условий для возникновения и поддержания положительной работы суммарных НАВ, что не только гарантированно защищает предлагаемый механизм от разрушения, но и эту разрушительную энергию превращает в полезную работу. Энергия при этом получается не за счет флаттера, а за счет положительной работы НАВ, которые возникают одновременно с возникновением самовозбуждающихся автоколебаний типа флаттера. При работе предлагаемого устройства скорость рабочего потока на выходе из устройства практически не отличается от скорости рабочего потока на входе в устройство, что указывает на практическую неизменность кинетической энергии потока текучей среды при прохождении через устройство независимо от количества и расположения рабочих объектов по длине, ширине и высоте устройства; с увеличением площади или количества рабочих органов пропорционально возрастает снимаемая с устройства электроэнергия (устройство работает в режиме генератора) или увеличивается тяговое усилие устройства (устройство работает в режиме движителя), появляется возможность бесконечного наращивания снимаемой мощности любого потока текучей среды (в том числе речных, морских и океанских течений, водопадов, приливов-отливов и т.п), кроме того, исключаются динамические удары и рывки при работе за счет постоянного совпадения направления возвратно-поступательных перемещений РЭ с нормальной составляющей движущей силы потока, при этом также исключаются скачки давления (повышение давления) на входе в устройство, что указывает на отсутствие опрокидывающего момента при монтаже устройства на крышах, мачтах, транспортных средствах, палубах судов и т.п., что значительно повышает кпд и надежность работы устройства. Т.е. возможны очень простая установка и эксплуатация этих устройств. Сохранение кинетической энергии потока неизменной на входе в устройство и на выходе из него позволяет производить монтаж и эксплуатацию любого количества и любой мощности устройств без нарушения экологической системы в данном регионе, без строительства сложных и дорогостоящих гидросооружений. Отсутствие турбулентности потока и ламинарное течение на выходе из устройства указывает на отсутствие критических и сверхкритических скоростей на РЭ, что делает возможным эксплуатацию данных устройств без создания высокочастотных шумов или радиопомех, без вреда для здоровья человека, животных и растений. Следовательно, появляется возможность монтажа устройств в непосредственной близости от потребления электроэнергии, что ведет к существенному сокращению основных (линии электропередач, трансформаторы и подстанции) и эксплуатационных (потери на передачу электроэнергии, обслуживание линий электропередач и подстанций) затрат. Изготовление устройств и запасных частей к ним не требует применения сложных и дорогих материалов, надежность и работоспособность основных исполнительных механизмов подтверждена двухвековой практикой человечества, сами устройства просты и надежны в эксплуатации, совместимы с простыми и надежными программами управления, диагностирования и автоматизации. Применение устройств в качестве движителей на транспортных средствах приводит к существенному сокращению топлива на морских и речных судах или к увеличению скорости морских и речных судов при абсолютной экологической безопасности водной среды. Применение устройств в качестве генераторов электроэнергии на автомобилях, автобусах, трамваях, поездах, морских и речных судах также приводит к существенному сокращению потребления топлива и электроэнергии. Эксплуатация устройств исключает явления парниковых эффектов и вредных выбросов, исключает повышение температуры всей планеты и связанных с ним экологических катастроф.
Общий термин «рабочий элемент» включает широкие понятия "крыло" в используемом здесь значении это "гидрокрыло", используемое в текущей воде, и "аэрокрыло", используемое для преобразования энергии ветра, или "лопасть", используемую для создания тягового усилия. Термин "крыло", подразумевающий неподвижные или вращающиеся рабочие элементы, используемые для создания подъемной силы для летательных аппаратов, неприменим в контексте данного изобретения.
Термин «неподвижное основание» предполагает жесткий каркас, на котором размещены исполнительные механизмы для осуществления гармонических вращательных и возвратно-поступательных перемещений и который может быть неподвижно закреплен относительно поверхности земли, или может быть закреплен на транспортном средстве, или выступать в роли плавучей платформы на воде.
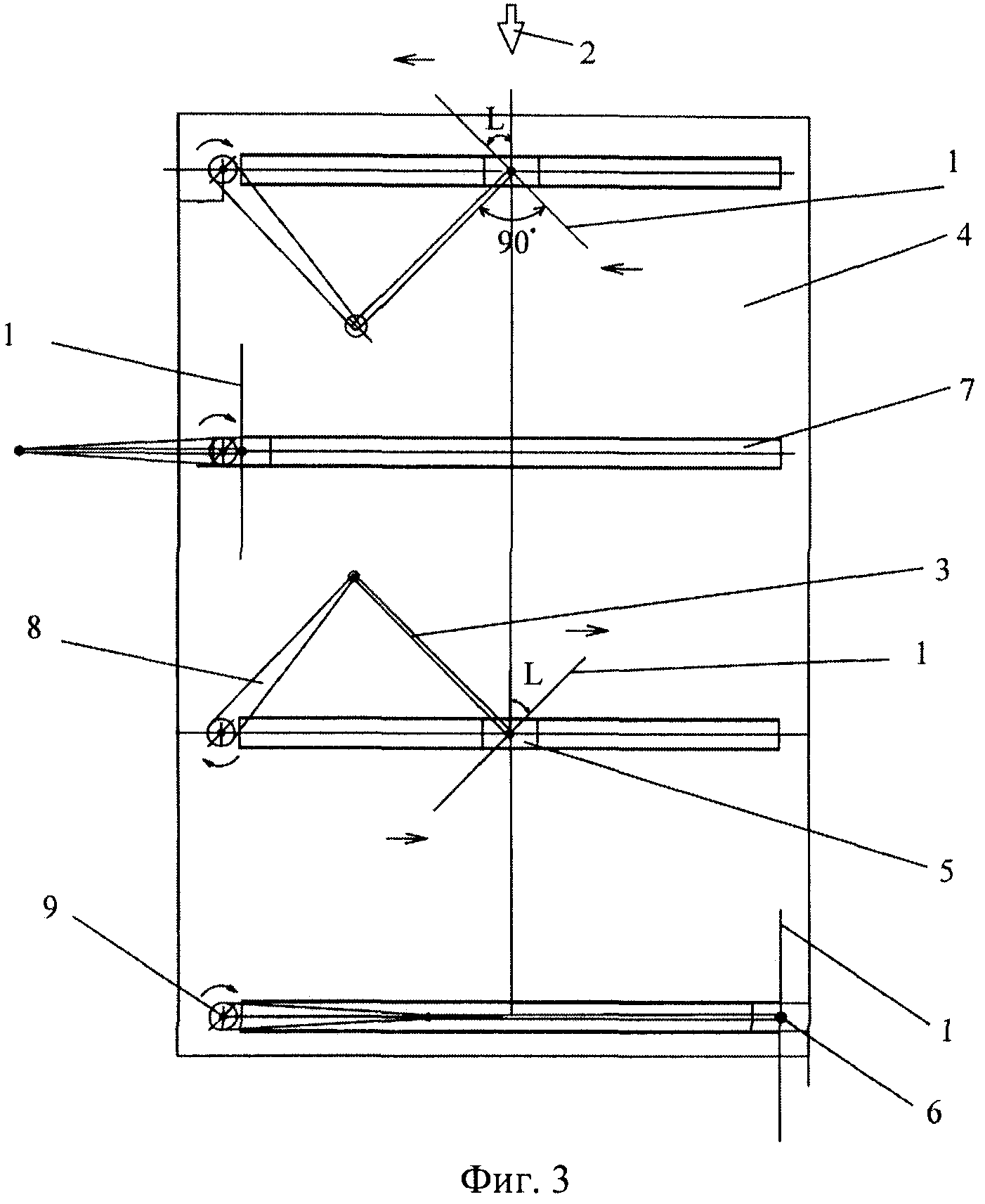
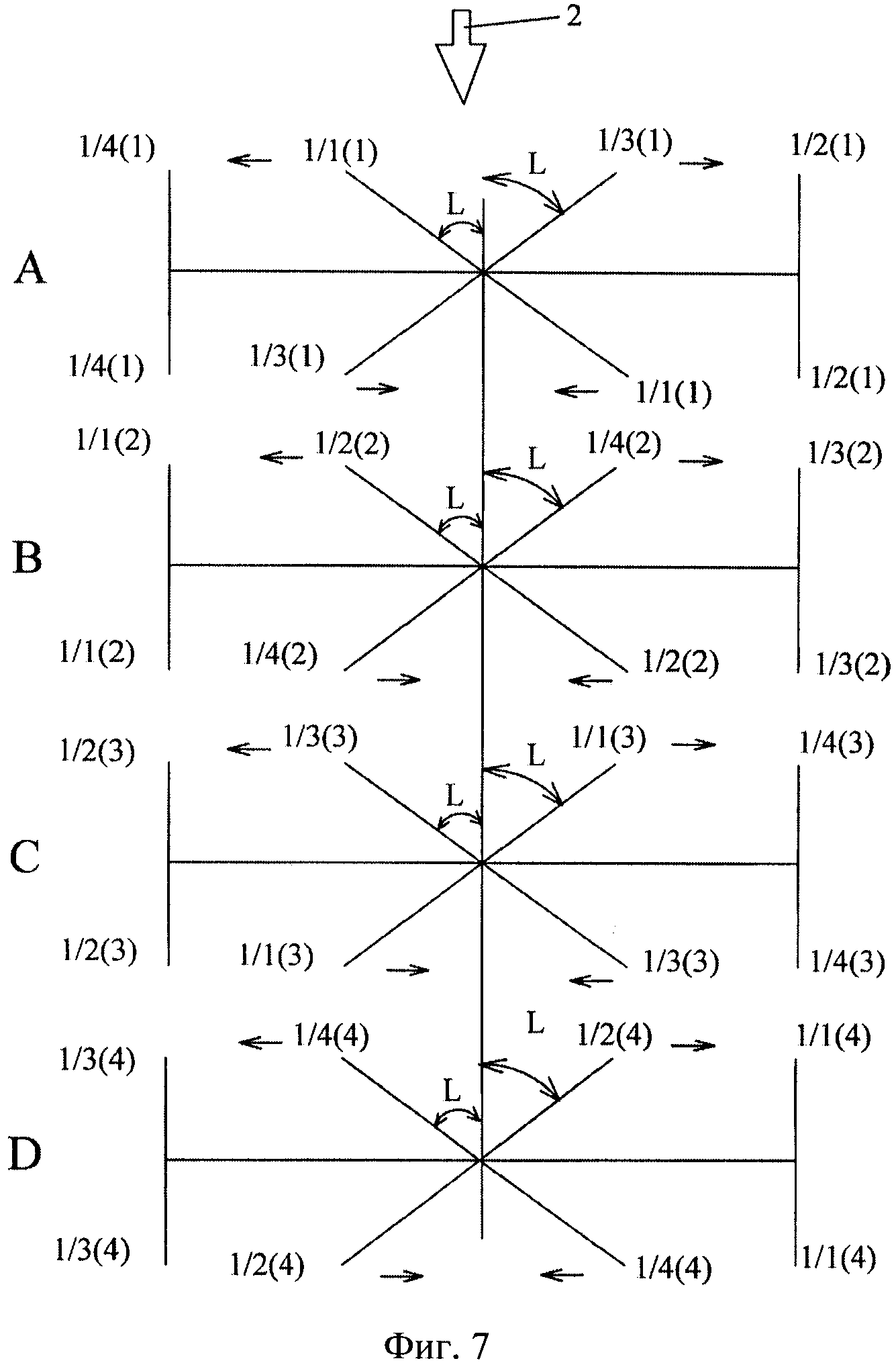
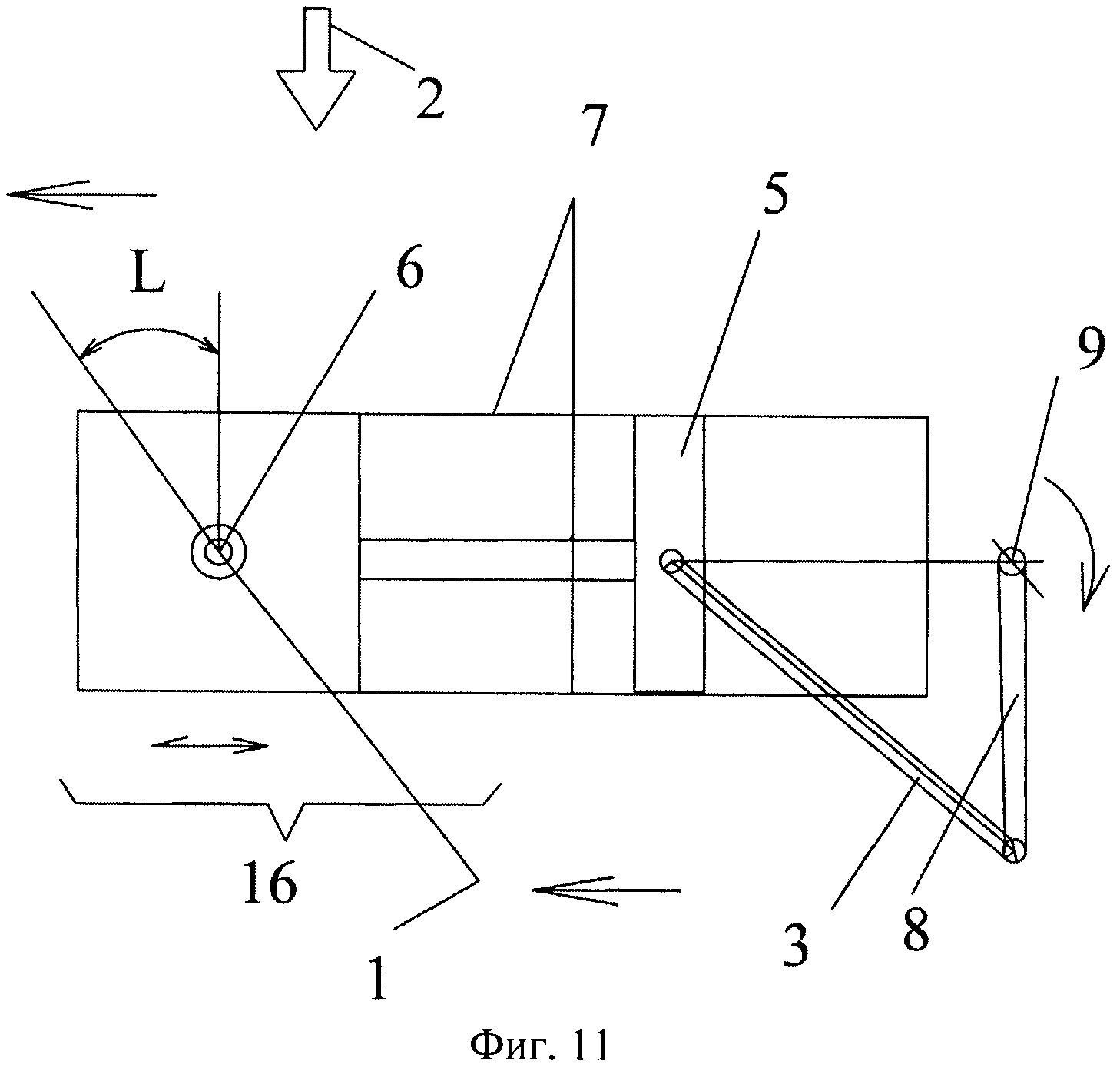
На чертежах проиллюстрировано предлагаемое устройство, где на фиг.1 представлено одномодульное устройство, вид сбоку; на фиг.2 - то же, вид со стороны расположения РЭ; на фиг.3 представлено четырехмодульное устройство с четырьмя РЭ, вид со стороны расположения РЭ; на фиг.4 представлено четырехмодульное устройство, вид со стороны передаточных механизмов; на фиг.5 представлена схема работы устройства в режиме движителя судна (в разрезе); на фиг.6 представлена схема взаимодействия одномодульного устройства с потоком текучей среды; на фиг.7 представлена схема взаимодействия четырехмодульного устройства с потоком текучей среды; на фиг.8 представлена схема взаимодействия восьмимодульного устройства с потоком текучей среды; на фиг.9 представлена схема взаимодействия одномодульного устройства с потоком рабочей среды в режиме движителя судна; на фиг.10 представлено устройство, в котором в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ, а также для осуществления фиксированного поворота РЭ использованы кинематически не связанные между собой гидроцилиндры, управление которыми осуществлено при помощи обычных средств автоматизации и компьютерного программирования; на фиг.11 представлен вариант устройства, в котором в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ использованы кинематически не связанные между собой исполнительные механизмы, выполненные в виде кривошипно-шатунного механизма для осуществления возвратно-поступательных перемещений РЭ и в виде мотор-редуктора, установленного на валу для осуществления гармонических вращательных перемещений и фиксированного поворота РЭ.
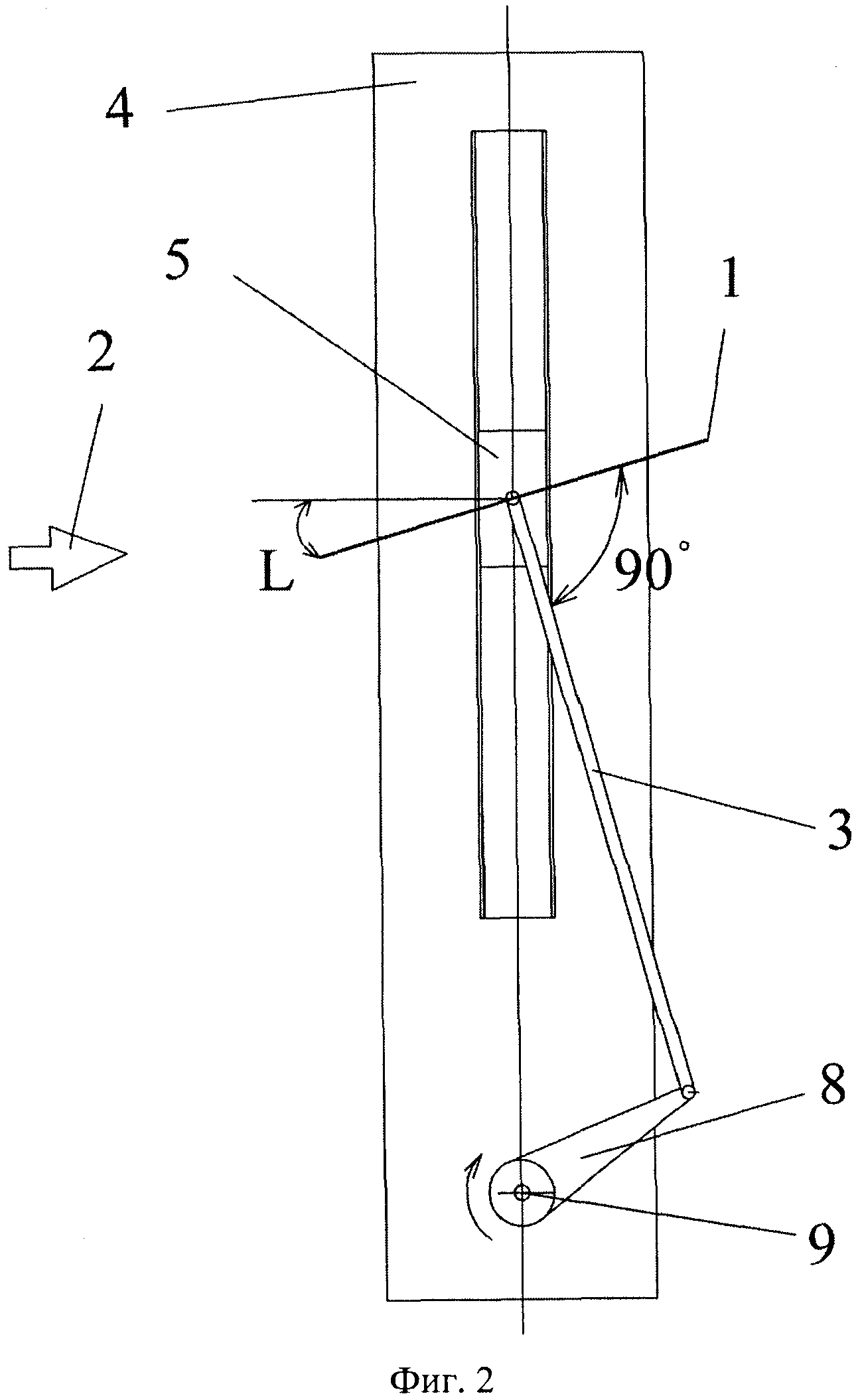
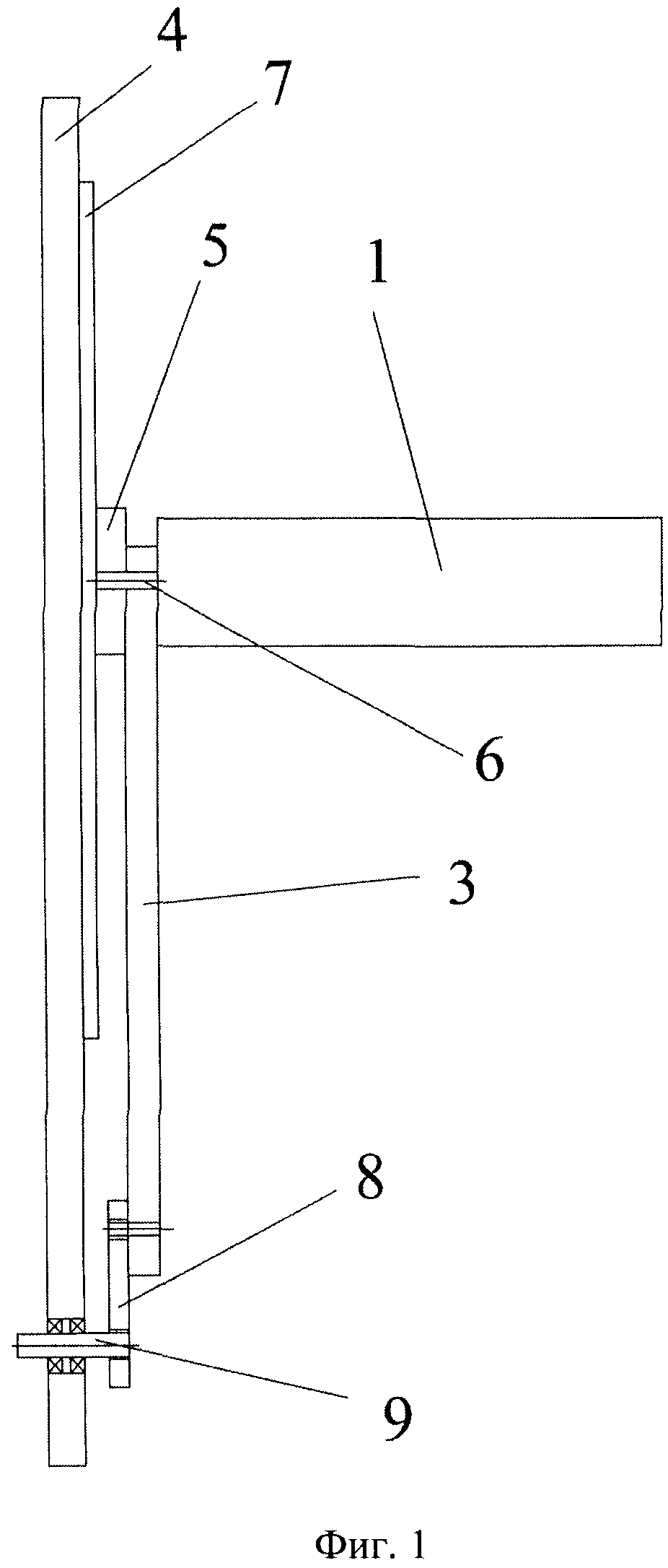
Устройство для преобразования кинетической энергии потока текучей среды в полезную работу (фиг.1, 2) содержит консольно установленные РЭ 1, имеющие возможность размещения в потоке текучей среды 2, оно выполнено в данном случае одномодульным, РЭ 1 закреплен консольно и неподвижно на шатуне 3, установленного на неподвижном основании 4 кривошипно-шатунного механизма, ползун 5 которого соединен с шатуном 3 при помощи оси 6 и имеет возможность возвратно-поступательного перемещения по направляющей 7, а шатун 3 противоположным концом шарнирно соединен с кривошипом 8, кинематически связанным с установленным на этом же неподвижном основании одним концом вала 9, другой конец которого предназначен для передачи энергии вращения кривошипа 8 на устройство для отбора мощности (не показано). Амплитуда возвратно-поступательных перемещений РЭ 1 зависит от геометрических параметров кривошипа 8. РЭ 1 установлен под углом 90° относительно шатуна 3 с углом атаки L относительно потока 2; на фиг.3 представлено четырехмодульное устройство с четырьмя РЭ 1, установленными под углом 90° относительно шатунов 3 с углом атаки L относительно потока 2; на фиг.4 представлено четырехмодульное устройство, вид со стороны передаточных механизмов, выполненных в виде шестерен 10, установленных на валах 9. На фиг.5 представлена схема работы устройства в режиме движителя судна (в разрезе), в котором неподвижное основание 4 представляет собой корпус судна, на котором размещены семь модулей, состоящих из РЭ 1, шатунов 3, кривошипов 8, передаточных шестерен 10, валов 9, ползунов 5, осей 6 и направляющих (не показаны). Устройство снабжено поджимным соплом 11 и диффузором 12.
Кроме того, РЭ 1 установлен с возможностью фиксированного поворота и вращательного перемещения вокруг оси 6, относительно которой он закреплен на шатуне 3, а геометрическая ось оси 6 находится в плоскости РЭ 1. Это дает возможность устанавливать фиксированный угол сдвига фаз между вращательными и возвратно-поступательными перемещениями РЭ 1, необходимый для запуска устройства и его эффективной работы, а также для остановки устройства при проведении профилактических работ путем установки нулевого угла атаки всех РЭ 1 относительно потока 2 (механизм фиксированного поворота на фигурах не показан).
Предпочтительным вариантом предлагаемого устройства является вариант, когда оно состоит из нескольких упомянутых модулей (фиг.3, 4), кинематически связанных между собой и имеющих возможность работы со сдвигом фаз. Кинематическая связь между модулями может быть осуществлена при помощи передаточных шестерен 10, размещенных на валу 9 с одной или противоположной стороны относительно неподвижного основания 4. Сдвиг фаз между модулями устанавливается при помощи передаточных шестерен 10.
При еще одном варианте выполнения предлагаемого устройства (фиг.8) оно состоит из парного числа модулей, а оси 6 закрепления РЭ 1 каждой пары модулей имеют возможность возвратно-поступательного перемещения в одной плоскости со сдвигом фаз 180°.
На фиг.5 изображено устройство для работы в режиме движителя судна. Неподвижным основанием 4 служит корпус судна. Устройство может быть снабжено поджимным соплом 11, предназначенным для увеличения объема и скорости потока 2, и диффузором 12, предназначенным для снижения давления потока 2 на РЭ 1, которые установлены соответственно перед РЭ 1 и за РЭ 1 по ходу движения потока (по ходу движения судна). Судовой двигатель 13 является генератором механической энергии, которая РЭ 1 преобразовывается в усилие тяги 14.
При еще одном варианте выполнения предлагаемого устройства (фиг.10) в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ 1, а также для осуществления фиксированного поворота РЭ 1 применяют кинематически не связанные между собой гидроцилиндр 15, осуществляющий возвратно-поступательные перемещения относительно направляющих 7, и подвижную каретку 16 с гидравлическим приводом (не показан) поворота РЭ 1, осуществляющую вращательные перемещения относительно оси 6 закрепления РЭ 1. Управление исполнительными механизмами осуществляют при помощи обычных средств автоматизации и компьютерного программирования.
При еще одном варианте выполнения предлагаемого устройства (фиг.11) в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ 1, а также для осуществления фиксированного поворота РЭ 1 применяют кинематически не связанные между собой кривошипно-шатунный механизм для осуществления возвратно-поступательных перемещений РЭ 1 и подвижную каретку 16 с механическим приводом в виде мотор-редуктора (не показан) поворота РЭ 1, установленного на оси 6 для осуществления гармонических вращательных перемещений и фиксированного поворота РЭ 1.
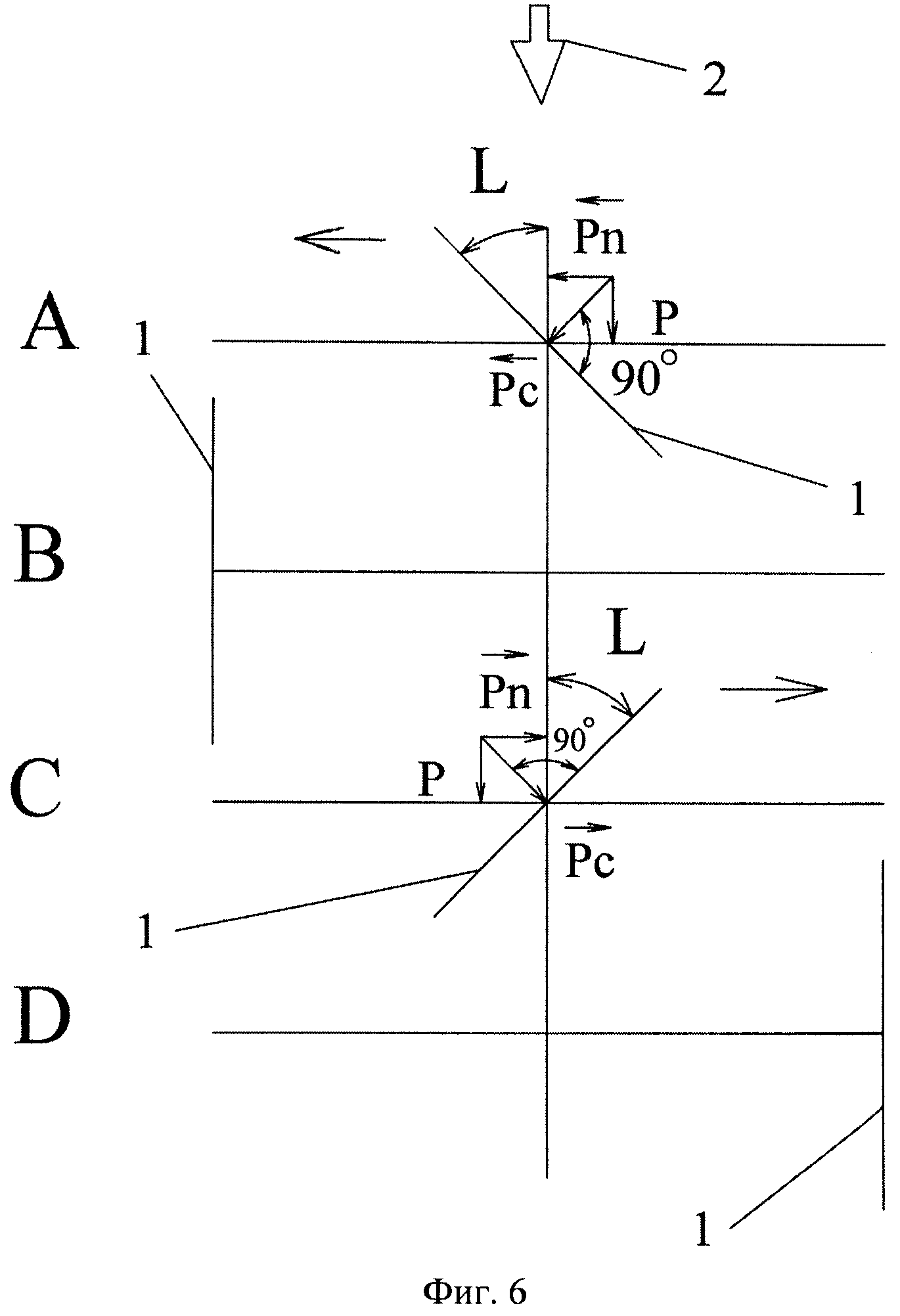
Способ преобразования кинетической энергии потока текучей среды в полезную работу осуществляется в процессе работы предлагаемого устройства следующим образом. РЭ 1 размещают в потоке текучей среды 2 под углом L относительно движения потока 2 с возможностью совершать возвратно-поступательные перемещения в направлении, перпендикулярном направлению движения потока 2, и вращательного перемещения вокруг оси 6, относительно которой РЭ 1 закреплен на шатуне 3, а геометрическая ось оси 6 находится в плоскости РЭ 1 (фиг.1, 2). Поток текучей среды 2 (фиг.6) воздействует на РЭ 1 в положении «А» и создает усилие, перемещающее РЭ 1 в направлении, перпендикулярном направлению движения потока 2 (направление перемещения указано стрелкой), и вращающее РЭ 1 вокруг оси 6 (фиг.1, 2), при этом вектор нормальной составляющей «Рп» движущей силы потока «Р» (фиг.6) совпадает с направлением перемещения РЭ 1, а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Угол «L» между РЭ 1 и направлением движения потока уменьшается, при этом уменьшается и величина воздействия потока 2 на РЭ 1. В положении «В» РЭ 1 меняет направление перемещения на противоположное, при этом угол «L»=0, воздействие потока 2 на РЭ 1 отсутствует, а положение «В» РЭ проходит по инерции за счет энергии вращения кривошипа 8 (фиг.1, 2). После прохождения положения «В» (фиг.6) угол «L» становится отличным от нуля, соответственно возникает усилие, совпадающее с инерционным усилием воздействия кривошипа 8 (фиг.1, 2) и перемещающее РЭ 1 в положение «С» (фиг.6), угол «L» возрастает, при этом вектор нормальной составляющей «Рn» движущей силы потока «Р» совпадает с направлением перемещения РЭ 1, а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Максимальное воздействие потока 2 на РЭ 1 в положении «А» и «С», при этом угол «L» достигает максимума и становится равным 45° (в данном случае). После прохождения положения «С» угол «L» уменьшается, соответственно уменьшается величина воздействия потока 2 на РЭ 1. В положении «D» РЭ 1 меняет направление перемещения на противоположное, при этом угол «L»=0, воздействие потока 2 на РЭ 1 отсутствует, а положение «D» РЭ 1 проходит по инерции за счет энергии вращения кривошипа 8 (фиг.1, 2). После прохождения положения «D» (фиг.6) угол «L» становится отличным от нуля, соответственно возникает усилие, совпадающее с инерционным усилием воздействия кривошипа 8 (фиг.1, 2) и перемещающее РЭ 1 в положение «А» (фиг.6), угол «L» возрастает, при этом вектор нормальной составляющей «Рn» движущей силы потока «Р» совпадает с направлением перемещения РЭ 1, а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Далее процесс повторяется.
Для уменьшения неравномерности движения РЭ 1 (фиг.1, 2), связанного с изменением движения ползуна 5 при прохождении «мертвых» точек (положения «В» и «Д» фиг.6), а также для повышения надежности и эффективности работы устройства при взаимодействии с потоком 2 на неподвижном основании 4 (фиг.3, 4) может быть размещено несколько (например, четыре) модулей. Схема равномерного колебательного перемещения РЭ 1 устройства, обеспечивающая гарантированный режим самовозбуждающихся колебаний типа «флаттер» при взаимодействии с потоком 2, представлена на фиг.7. Стрелками показаны направления возвратно-поступательных перемещений РЭ 1, происходящих за счет воздействия потока 2 на РЭ 1. Угол сдвига фаз между перемещениями соседних РЭ 1 устанавливают механически путем соответствующего расположения передаточных шестерен 10 (фиг.4) в зависимости от поставленной задачи. В данном примере (фиг.7) угол сдвига фаз между перемещениями соседних РЭ 1 равен 90°. Рабочий поток 2 (фиг.7) взаимодействует с РЭ 1/1, 1/2, 1/3 и 1/4 четырехмодульного устройства, при этом (позиция А - начальный момент времени) воздействие на РЭ 1/1 максимально (положение 1/1(1), угол L=max), воздействия на РЭ 1/2 поток 2 не оказывает (положение 1/2(1), угол L=0), воздействие потока на РЭ 1/3 максимально (положение 1/3(1), угол L=max, направление перемещения прямо противоположно направлению перемещения РЭ 1/1), воздействия на РЭ 1/4 поток 2 не оказывает (положение 1/4(1), угол L=0). При повороте кривошипа 8 на 90 градусов (фиг.3) РЭ1/1 и 1/3 (фиг.7, позиция В - поворот кривошипа 8 на 90° относительно начального момента времени) займут положение 1/1(2) и 1/3(2) соответственно, при которых отсутствует их взаимодействие с потоком 2, так как углы L=0, в то время как РЭ 1/2 и 1/4 займут положения 1/2(2) и 1/4(2) соответственно, при которых воздействие потока 2 на эти РЭ будет максимальным за счет максимального угла атаки L. Далее процесс движения повторяется (фиг.7, позиция С - поворот кривошипа 8 на 180° относительно начального момента времени и D - поворот кривошипа 8 на 270° относительно начального момента времени) через каждые 90° вращения кривошипа 8 (фиг.3) по вышеприведенной схеме. При этом суммарное усилие, передающееся на передаточную шестерню 10 (фиг.4), будет равным суммарному усилию воздействия потока 2 на все РЭ 1 устройства одновременно.
С целью увеличения эффективности преобразования энергии потока 2 РЭ 1 могут располагаться не только вдоль по потоку (фиг.3), но и по другой схеме. Схема взаимодействия восьмимодульного устройства, в которой оси 6 закрепления РЭ 1 каждой пары модулей совершают возвратно-поступательные перемещения в одной плоскости со сдвигом фаз 180°, представлена на фиг.8. Рабочий поток 2, воздействуя на РЭ 1/1 и 1/2 (поз.А), перемещает их навстречу друг другу, поджимая объем потока 2, расположенного в воображаемой камере 1/1-1/1-1/2-1/2. В это время РЭ 1/3 и 1/4 (поз.В) находятся в нейтральном положении (угол L=0), готовые начать движение (сжатие потока 2, расположенного в воображаемой камере 1/3-1/3-1/4-1/4); РЭ 1/5 и 1/6 (поз.С) движутся в противоположные стороны, создавая разрежение в воображаемой камере 1/5-1/5-1/6-1/6 и способствуя увеличению энергии движения потока 2, а РЭ 1/7 и 1/8 (поз.D) находятся в нейтральном положении, готовые начать движение в противоположные стороны, тем самым создавая благоприятные условия для дальнейшего движения потока 2. Таким образом происходит увеличение кинетической энергии движения потока 2 за РЭ 1, следовательно, увеличивается и полезная работа устройства.
Для использования устройства в режиме движителя (фиг.5) необходимо подвести механическую (электрическую) энергию от двигателя (электродвигателя) 13 на вал 9, передаточные шестерни 10 и кривошип 8. Вращательное движение кривошипа 8 через шатун 3 преобразуется в гармонические вращательные и возвратно-поступательные перемещения РЭ 1, которые, взаимодействуя с рабочим телом (жидкостью или газом), создают усилие тяги 14 («Ft»), передвигающее транспортное средство (водное, наземное или воздушное) в направлении, перпендикулярном направлению возвратно-поступательных перемещений РЭ 1. При этом вектор нормальной составляющей «Fn» усилия тяги «Ft» противоположен направлению перемещения РЭ 1, а результирующая «Fc» усилия тяги «Ft» направлена перпендикулярно боковой поверхности РЭ 1. Направление движения потока 2, возникающего вследствие воздействия РЭ 1 на рабочее тело (жидкость или газ), противоположно направлению усилия тяги 14 судна, а вектор нормальной составляющей «Рп» движущей силы потока «Р» совпадает с направлением перемещения РЭ 1. Для увеличения эффективности преобразования механической энергии судового двигателя в усилие тяги «Ft» движения судна на входе в устройство перед РЭ 1 возможна установка поджимного сопла 11, предназначенного для увеличения объема и скорости потока 2, а на выходе из устройства за РЭ 1 возможна установка диффузора 12, предназначенного для снижения давления потока 2 на РЭ 1 (фиг.5).
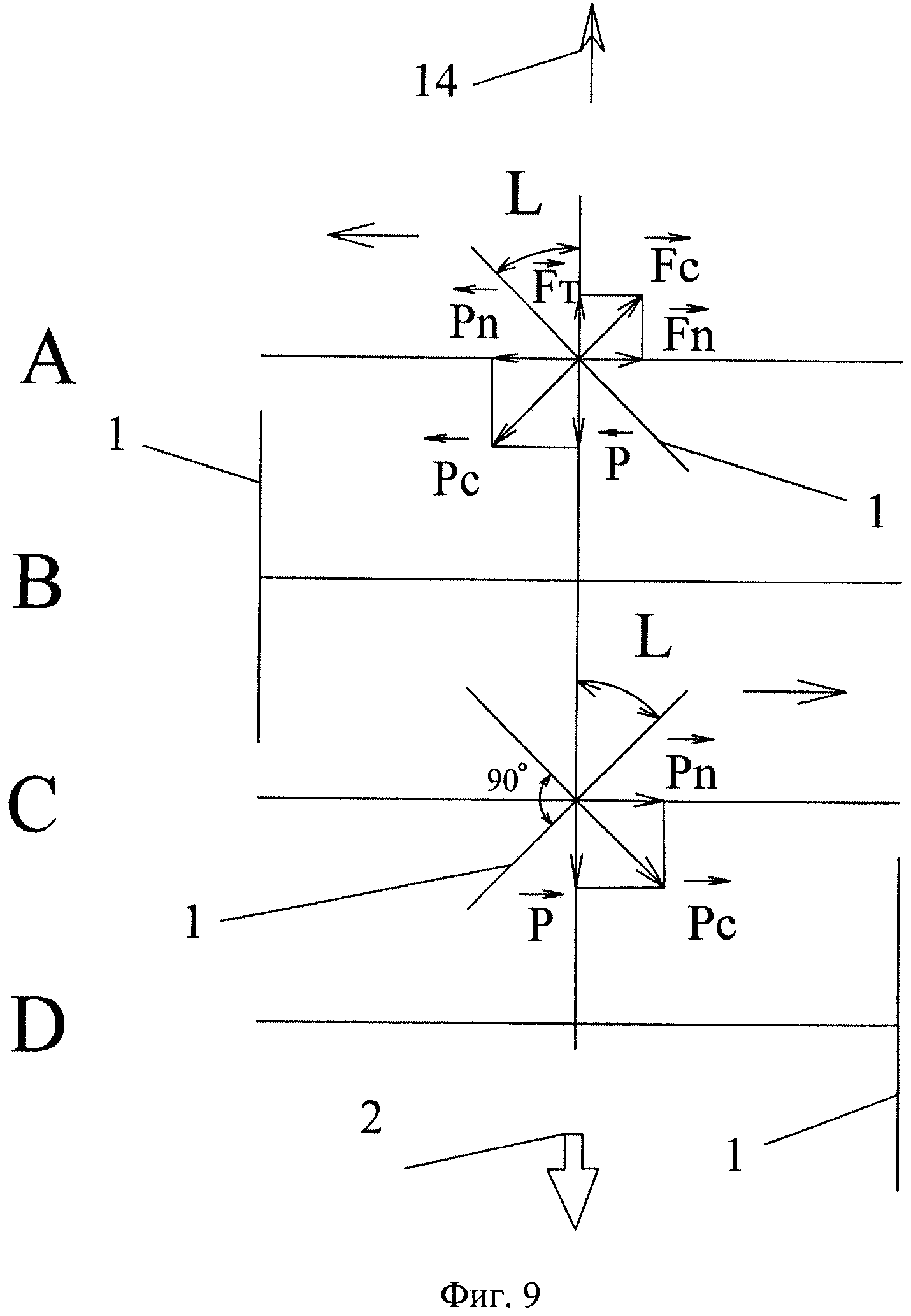
Схема преобразовании механической энергии судового двигателя 13 в усилие тяги «Ft» (полезную работу) движения судна (транспортного средства) на примере взаимодействия одномодульного устройства в режиме движителя судна с рабочей средой (жидкостью или газом) представлена на фиг.9, при этом направление движения потока 2 противоположно направлению усилия тяги 14 движения судна. Устройство работает следующим образом. РЭ 1 размещают в рабочей текучей среде (жидкость или газ) под углом L относительно оси судна с возможностью совершать возвратно-поступательные перемещения в направлении, перпендикулярном оси судна, и вращательного перемещения вокруг оси 6, относительно которой РЭ 1 закреплен на шатуне 3, а геометрическая ось оси 6 находится в плоскости РЭ 1 (фиг.5). Механическая энергия судового двигателя 13 через передаточные механизмы 9, 10, 8 и 3 преобразуется в гармонические вращательные и возвратно-поступательные перемещения РЭ 1, которые, взаимодействуя с рабочим телом (жидкостью или газом), создают усилие тяги 14, передвигающее транспортное средство (водное, наземное или воздушное) в направлении, перпендикулярном направлению возвратно-поступательных перемещений РЭ 1. РЭ 1 (фиг.9) воздействует на рабочую среду (жидкость) в положении «А» и создает усилие, перемещающее рабочую среду в направлении, перпендикулярном направлению поступательного перемещения оси 6 закрепления РЭ 1, вокруг которой РЭ 1 совершает и вращательное перемещение (фиг.1, 2, 5), при этом вектор нормальной составляющей «Рn» движущей силы «Р» потока текучей среды 2 (фиг.9), возникающего вследствие воздействия РЭ 1 на рабочую среду (жидкость), совпадает с направлением перемещения РЭ 1, а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Одновременно возникает усилие тяги «Ft», направленное противоположно направлению движения потока «Р» и перемещающее судно вдоль его оси. Вектор нормальной составляющей усилия тяги «Fn» направлен в сторону, противоположную поступательному перемещению оси 6 закрепления РЭ 1. Угол «L» между РЭ 1 и направлением движения потока 2 уменьшается, при этом уменьшается и величина воздействия РЭ 1 на рабочую среду. В положении «В» РЭ 1 меняет направление перемещения на противоположное, при этом угол «L»=0, воздействие РЭ 1 на рабочую среду отсутствует, а положение «В» РЭ проходит по инерции за счет энергии вращения кривошипа 8 (фиг.1, 2, 5). После прохождения положения «В» (фиг.9) угол «L» становится отличным от нуля, РЭ 1 перемещается в положение «С» (фиг.9), угол «L» возрастает, при этом возрастает воздействие РЭ 1 на рабочую среду, перемещая ее в направлении, перпендикулярном направлению поступательного перемещения оси 6 закрепления РЭ 1, вокруг которой РЭ 1 совершает и вращательное перемещение (фиг.1, 2, 5), вектор нормальной составляющей «Рn» движущей силы потока «Р» совпадает с направлением перемещения РЭ 1 (фиг.9), а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Усилие тяги движения судна «Ft» направлено противоположно направлению движения потока «Р» и перемещает судно вдоль его оси. Максимальное воздействие РЭ 1 на рабочую среду в положении «А» и «С», при этом угол «L» достигает максимума и становится равным 45° (в данном случае). После прохождения положения «С» угол «L» уменьшается, соответственно уменьшается величина воздействия РЭ 1 на рабочую среду. В положении «D» рабочий элемент 1 меняет направление перемещения на противоположное, при этом угол «L»=0, воздействие РЭ 1 на рабочую среду отсутствует, а положение «D» рабочий элемент 1 проходит по инерции за счет энергии вращения кривошипа 8 (фиг.1, 2, 5). После прохождения положения «D» (фиг.9) угол «L» становится отличным от нуля, рабочий элемент 1 перемещается в положение «А», угол «L» возрастает, при этом вектор нормальной составляющей «Рn» движущей силы потока «Р» совпадает с направлением перемещения РЭ 1, а результирующая «Рс» движущей силы потока «Р» направлена перпендикулярно боковой поверхности РЭ 1. Усилие тяги «Ft» перемещает судно в направлении, противоположном направлению движения потока «Р» вдоль оси судна. Вектор нормальной составляющей усилия тяги «Fn» направлен в сторону, противоположную поступательному перемещению оси 6 закрепления РЭ 1. Далее процесс повторяется.
Угол сдвига фаз между вращательными и возвратно-поступательными перемещениями выставляется в зависимости от требуемой задачи (в вышеприведенных конкретных схемах угол сдвига фаз равен 90°). Угол сдвига фаз между перемещениями соседних модулей выставляется в зависимости от требуемой задачи (в вышеприведенных конкретных схемах угол сдвига фаз равен 90 или 180°). Точно также, в зависимости от поставленной задачи (устройство работает в режиме генератора или движителя), возможно регулирование смещения центра тяжести (центра кручения) РЭ 1, тем самым увеличивается крутящий момент, а следовательно, и усилие, возникающее от взаимодействия рабочего тела (потока жидкости, газа или смеси) с РЭ 1 устройства и передаваемое на генератор (устройство работает в режиме генератора), или от двигателя через устройство на рабочее тело (устройство работает в режиме движителя).
Схема работы устройства в режиме вентилятора аналогична схеме работы устройства в режиме движителя (фиг.9).
При еще одном варианте выполнения предлагаемого устройства (фиг.10) в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ 1, а также для осуществления фиксированного поворота РЭ 1 применяют кинематически не связанные между собой гидроцилиндр 15, осуществляющий возвратно-поступательные перемещения РЭ 1 относительно направляющих 7, и подвижную каретку 16 с гидравлическим приводом (не показан) поворота РЭ 1, осуществляющим вращательные перемещения РЭ 1 относительно оси 6 закрепления РЭ 1. Управление исполнительными механизмами осуществляют при помощи обычных средств автоматизации и компьютерного программирования.
При еще одном варианте выполнения предлагаемого устройства (фиг.11) в качестве исполнительных механизмов для осуществления взаимосвязанных между собой гармонических вращательных и возвратно-поступательных перемещений РЭ 1, а также для осуществления фиксированного поворота РЭ 1 применяют кинематически не связанные между собой кривошипно-шатунный механизм для осуществления возвратно-поступательных перемещений РЭ 1 и подвижную каретку 16 с механическим приводом в виде мотор-редуктора (не показан) поворота РЭ 1, установленного на оси 6 для осуществления гармонических вращательных перемещений и фиксированного поворота РЭ 1.