Результат интеллектуальной деятельности: ПЫЛЕСОС
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к пылесосу, включающему в себя корпус, который может самостоятельно перемещаться в пределах предварительно заданного опорного расстояния посредством определения положения всасывающей насадки или пользователя, расположенных на расстоянии от корпуса.
Описание уровня техники
Обычно пылесосом является бытовое электрическое устройство, которое всасывает объекты очистки, такие как пыль и грязь, вместе с воздухом при помощи всасывающего электродвигателя, установленного в его корпусе, чтобы собирать их в нем.
Такой пылесос может быть классифицирован контейнерного типа, содержащий всасывающую насадку в соединении с корпусом при помощи соединительной трубки для всасывания объектов очистки, и колонного типа, содержащий всасывающую насадку, выполненную как одно целое с корпусом.
Пылесос контейнерного типа включает в себя корпус пылесоса, в котором установлен всасывающий электродвигатель для генерации всасывающей силы, всасывающую насадку для всасывания объектов очистки, расположенных на поверхности очистки, используя всасывающую силу, генерируемую из корпуса пылесоса, и соединительную трубку для соединения корпуса пылесоса с всасывающей насадкой.
Другими словами, при приложении электрической энергии к корпусу пылесоса, всасывающий электродвигатель приводится в действие, и генерируется всасывающая сила. Всасывающая сила обеспечивает всасывание воздуха, содержащего пыль и посторонние вещества, расположенные на поверхности, которая должна быть очищена, во всасывающую насадку. Воздух, включающий в себя пыль и посторонние вещества, втягивается в корпус пылесоса через соединительную трубку.
Объекты очистки (пыль и посторонние вещества), втянутые в корпус пылесоса, могут отделяться фильтром, в то время как они перемещаются в корпус. После этого отделенные объекты очистки хранятся в корпусе пылесоса, и хранящиеся пыль и посторонние вещества удаляются из корпуса пользователем.
Между тем, известный пылесос, упомянутый выше, может быть типом, который пользователь перемещает для использования.
То есть пользователь убирает пылесосом пыль и посторонние вещества в корпус пылесоса, с перемещением всасывающей насадки до остановки в том месте, где расположены объекты очистки. При перемещении всасывающей насадки корпус пылесоса перемещается к пользователю при помощи соединительной трубки.
Однако такой известный пылесос может вызвать проблему уменьшения удобства для пользователя, который чувствителен к весу корпуса пылесоса.
Краткое описание раскрытия
Следовательно, настоящее изобретение относится к пылесосу. Задачей настоящего изобретения является создание пылесоса, который содержит корпус, который может перемещаться самостоятельно в пределах предварительно заданного опорного расстояния или диапазона опорного расстояния посредством определения положения пользователя или всасывающей насадки, находящихся на расстоянии от корпуса.
Дополнительные преимущества, задачи и признаки раскрытия будут частично изложены в нижеследующем описании и частично станут понятны специалистам в данной области техники при изучении нижеследующего описания или при применении на практике настоящего изобретения. Задачи и другие преимущества настоящего изобретения могут быть осуществлены и достигнуты за счет конструкции, подробно указанной в его письменном описании и формуле изобретения, а также на прилагаемых чертежах.
Для достижения этих целей и других преимуществ и в соответствии с целью настоящего изобретения, как воплощено и подробно описано в данном документе, пылесос включает в себя корпус, содержащий всасывающий электродвигатель, установленный в нем, всасывающую насадку, расположенную на расстоянии от корпуса, устройство обработки изображения, расположенное в корпусе, для фотографирования передней стороны корпуса и распознания информации об относительном положении между корпусом и мишенью, установленной для отслеживания корпусом, приводной модуль, выполненный с возможностью перемещения корпуса, и контроллер, выполненный с возможностью управления приводным модулем для определения расстояния между корпусом и мишенью, которое включено в информацию о положении, выдаваемую устройством обработки изображения, в пределах диапазона предварительно установленного опорного расстояния.
Устройство обработки изображения может содержать модуль фотографирования изображения, выполненный с возможностью фотографирования передней стороны, модуль отделения изображения, выполненный с возможностью отделения изображения мишени от сфотографированного изображения передней стороны, и запоминающее устройство, выполненное с возможностью хранения данных расстояния, соответствующих положению изображения мишени, расположенного на изображении передней стороны, и контроллер может определять расстояние между мишенью и корпусом на основании данных расстояния и положения изображения мишени.
Мишенью является пользователь, который оперирует всасывающей насадкой.
Приводной модуль может включать в себя пару колес, расположенных в нижней части корпуса, и электродвигатель, соединенный с парой колес, для вращения колес.
Пара колес может быть расположена на обоих концах корпуса, соответственно, и пара электродвигателей может быть установлена для вращения пары колес, соответственно.
Модуль фотографирования изображений может фотографировать по меньшей мере два изображения передней стороны через предварительно заданный интервал. Модуль отделения изображения может устанавливать одно из двух изображений с большим изменением положения в качестве изображения мишени посредством сравнения по меньшей мере двух изображений передней стороны друг с другом, и модуль отделения изображения может отделять изображение мишени от самого последнего из двух сфотографированных изображений передней стороны.
Контроллер может устанавливать данные расстояния, соответствующие самому нижнему концу изображения мишени в качестве расстояния между корпусом и мишенью.
Информация о положении, распознанная из изображения передней стороны устройством обработки изображения, может включать в себя угол направления к мишени от корпуса. Контроллер может управлять приводным модулем для поворота корпуса, чтобы поместить угол направления к мишени от корпуса в пределы диапазона предварительно установленного опорного угла.
Запоминающее устройство может сохранять данные угла, соответствующие положению изображения мишени, расположенного на изображении передней стороны. Контроллер может распознавать данные угла, соответствующие положению изображения мишени в качестве угла направления к мишени от корпуса.
Мишенью может быть всасывающая насадка.
Пылесос может дополнительно включать в себя по меньшей мере два светоизлучающих модуля, расположенных на всасывающей насадке и разделенных заранее заданным расстоянием друг от друга. Устройство обработки изображения может распознавать информацию об относительном положении корпуса и мишени посредством фотографирования световых излучений из светоизлучающих модулей.
Устройство обработки изображения может включать в себя модуль фотографирования изображения, выполненный с возможностью фотографирования изображения передней стороны, имеющего света, излученные из светоизлучающих модулей, и запоминающее устройство, выполненное с возможностью хранения данных расстояния, соответствующих расстоянию между светами светоизлучающих модулей, которые сфотографированы на изображении передней стороны. Контроллер определяет расстояние посредством сравнения расстояния между светами, сфотографированными на изображении передней стороны, с данными расстояния.
Информация о положении, распознанная из изображения передней стороны устройством обработки изображения, может включать в себя угол направления к мишени от корпуса. Контроллер может поворачивать корпус посредством управления приводным модулем для размещения угла направления к мишени от корпуса в пределах диапазона предварительно установленного опорного угла.
Запоминающее устройство может хранить данные угла, соответствующие положению каждой точки, расположенной на изображении передней стороны. Контроллер может распознавать данные угла, соответствующие одному из светов, излученных из светоизлучающих модулей, которые сфотографированы на изображении передней стороны, в качестве угла направления к мишени от корпуса.
Запоминающее устройство хранит данные угла, соответствующие положению каждой точки, расположенной на изображении передней стороны. Контроллер может распознавать данные угла, соответствующие центральной точке между светами светоизлучающих модулей, которые сфотографированы на изображении передней стороны, в качестве угла направления к мишени от корпуса.
Следовательно, настоящее изобретение имеет результатом создание пылесоса, содержащего корпус, который может самостоятельно перемещаться в пределах предварительно установленного опорного расстояния или диапазона опорного расстояния посредством определения положения пользователя или всасывающей насадки, расположенных на заданном расстоянии от корпуса.
Следует понимать, что как вышеизложенное общее описание, так и нижеследующее подробное описание настоящего изобретения являются примерными и объяснительными и предназначены для обеспечения дальнейшего объяснения настоящего изобретения, как заявлено.
Краткое описание чертежей
Сопроводительные чертежи, которые включены для обеспечения дальнейшего понимания настоящего раскрытия и составляют часть настоящей заявки, иллюстрируют вариант (варианты) настоящего раскрытия и вместе с описанием служат для объяснения принципа настоящего раскрытия. На чертежах:
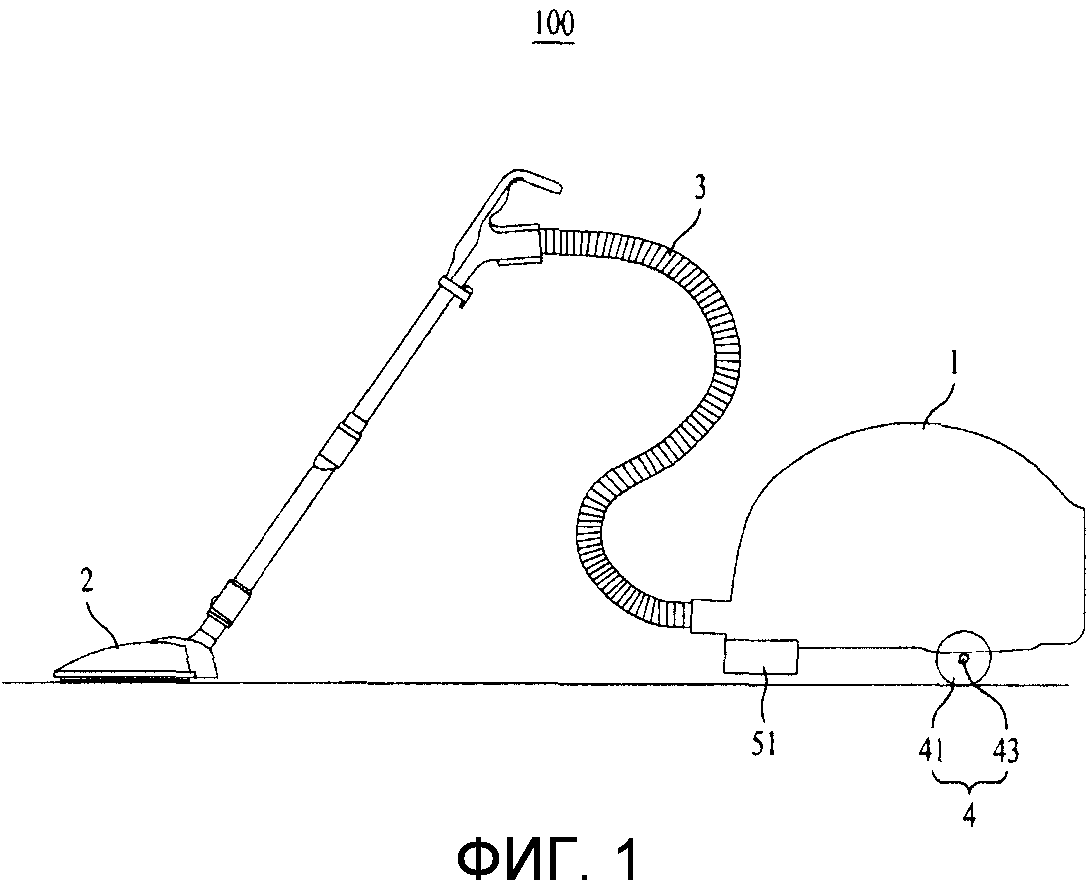
фиг.1 - концептуальная схема, иллюстрирующая пылесос в соответствии с вариантом осуществления настоящего изобретения;
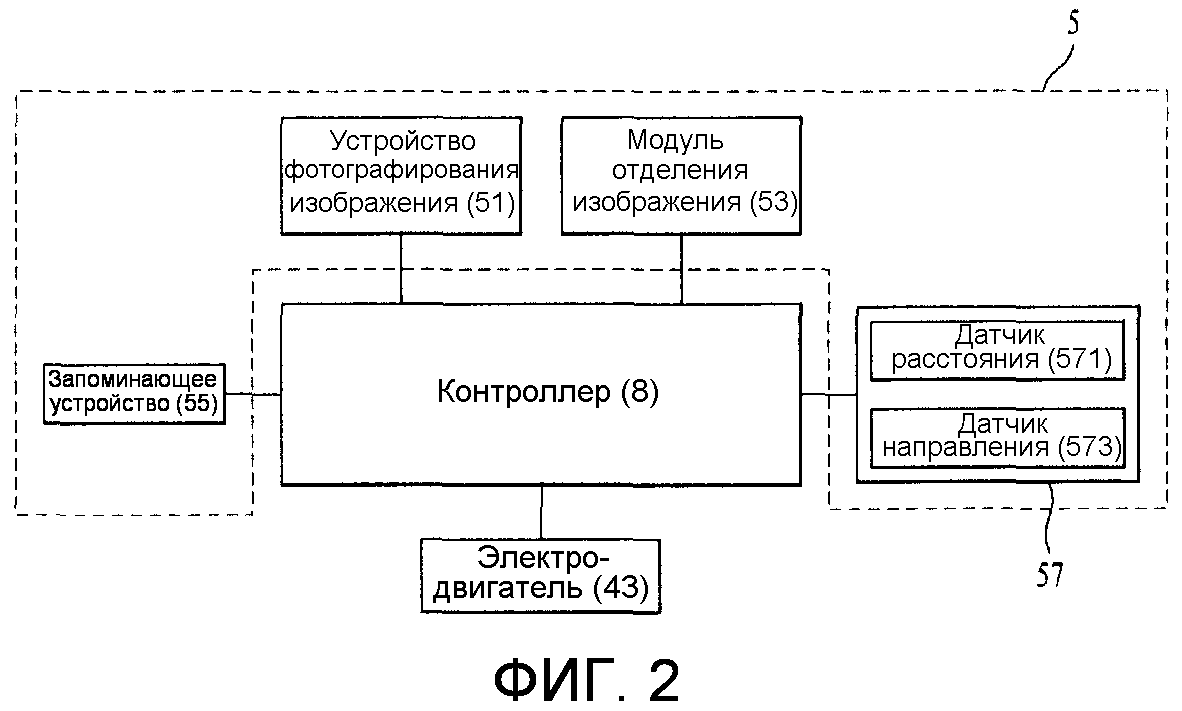
фиг.2 - концептуальная схема, иллюстрирующая контроллер в соответствии с вариантом осуществления;
фиг.3 - концептуальная схема, иллюстрирующая изображение передней стороны и изображение мишени;
фиг.4 - пример данных опорного расстояния и данных опорного угла, хранящихся в запоминающем устройстве;
фиг.5 - концептуальная схема, иллюстрирующая пылесос в соответствии с другим вариантом осуществления настоящего изобретения;
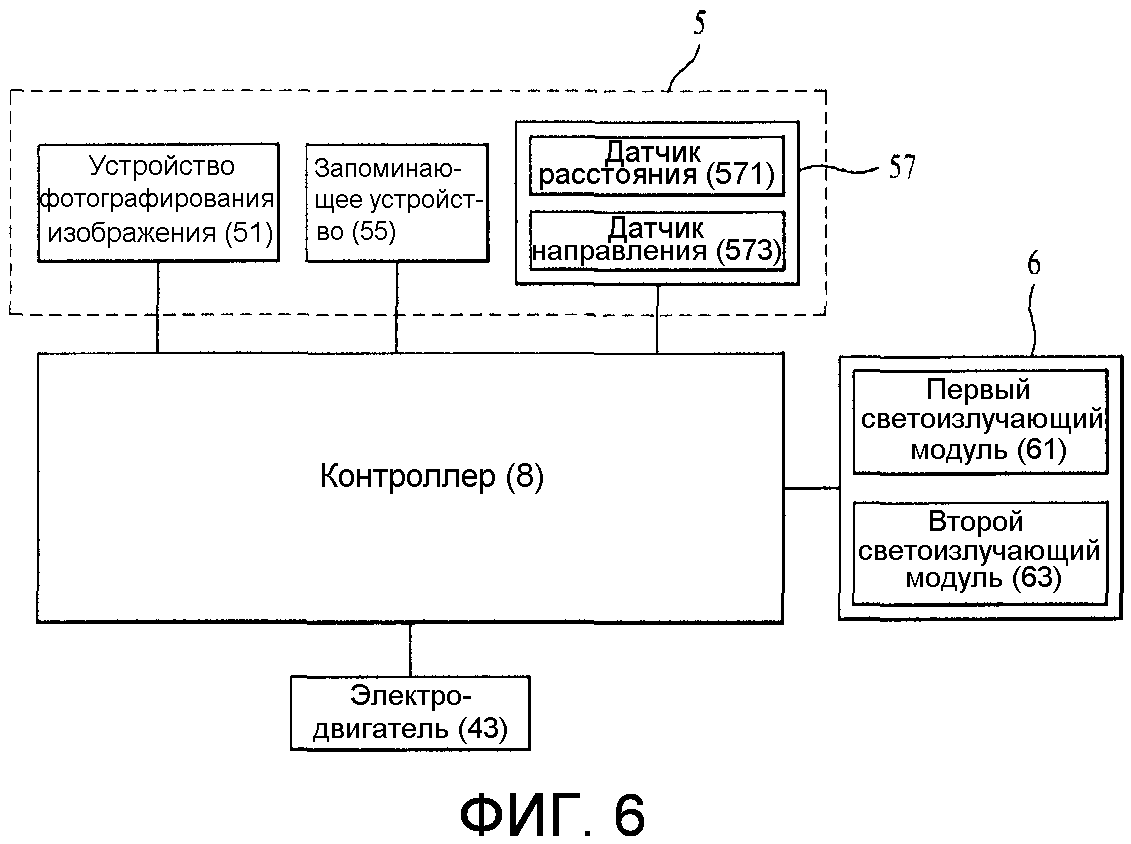
фиг.6 - концептуальная схема, иллюстрирующая контроллер в соответствии с вариантом осуществления, изображенным на фиг.5;
фиг.7 - концептуальная схема изображения передней стороны;
фиг.8 - пример данных опорного расстояния и данных опорного угла, хранящихся в запоминающем устройстве; и
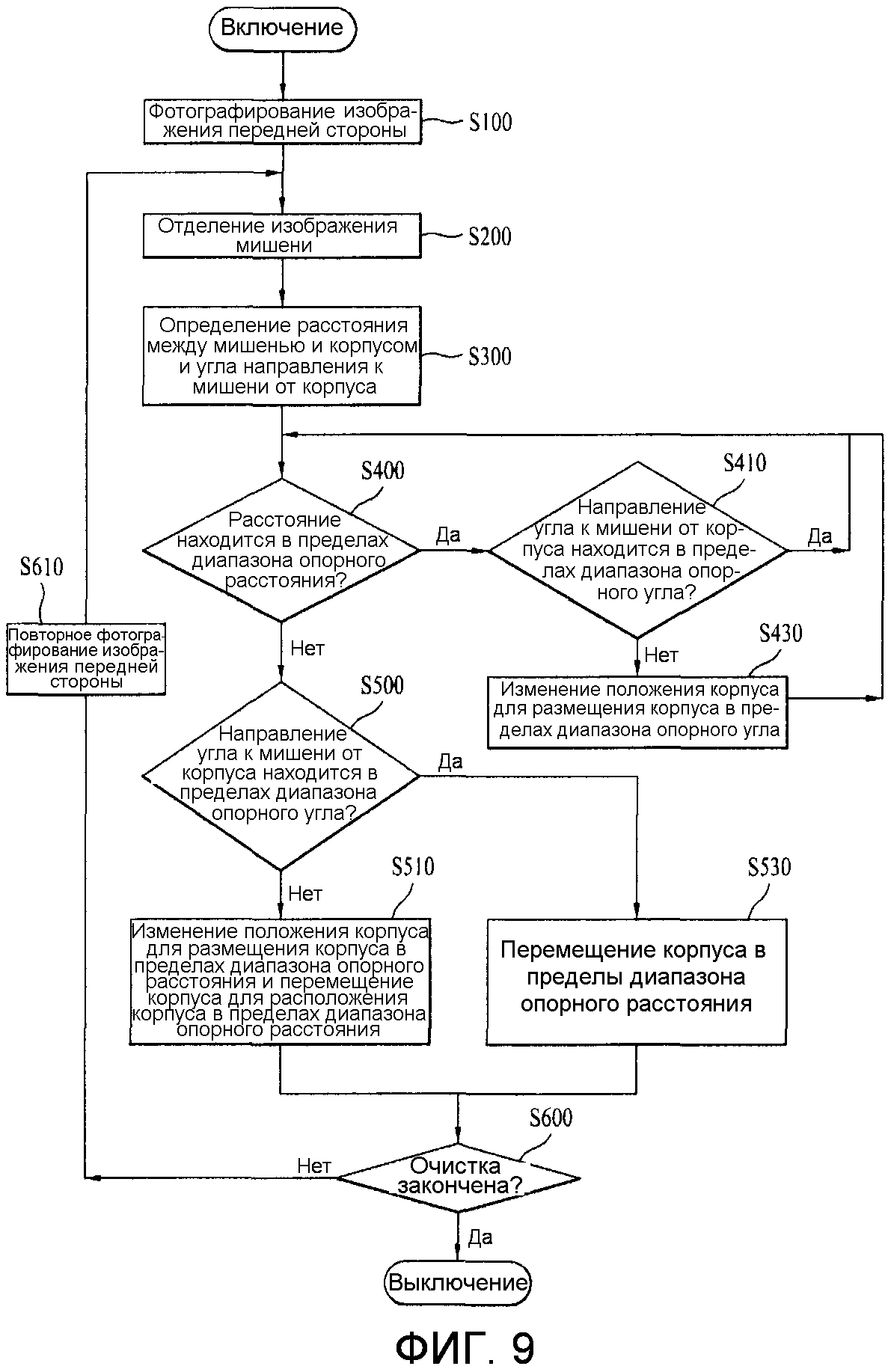
фиг.9 - схема последовательности операций, иллюстрирующая процесс управления пылесосом в соответствии с настоящим изобретением.
Описание конкретных вариантов осуществления
Как изложено ниже, пылесос в соответствии с примерами осуществления настоящего изобретения описан подробно со ссылкой на сопроводительные чертежи.
Фиг.1 - концептуальная схема, иллюстрирующая пылесос в соответствии с вариантом осуществления настоящего изобретения.
Пылесос 100 в соответствии с данным вариантом осуществления включает в себя корпус 1 для создания всасывающей силы и соединительную трубку 3 для передачи всасывающей силы, создаваемой в корпусе, всасывающей насадке 2.
Всасывающая насадка 2 всасывает объекты очистки, такие как пыль и посторонние вещества, с использованием всасывающей силы, обеспеченной через соединительную трубку 3, и всасываемые объекты очистки собираются в отделении для хранения (не показано), обеспеченном в корпусе 1, через соединительную трубку 3.
Приводной модуль 4 расположен в корпусе 1, и приводной модуль 4 может включать в себя электродвигатель 43, приводимый в действие контроллером 8, который описан ниже, и пару колес 41, соединенных с электродвигателем 43.
Помимо этого, известный пылесос является перемещаемым типом, при помощи которого пользователь может пылесосить, перемещая корпус пылесоса. То есть пользователь втягивает пылесосом пыль или посторонние вещества в корпусе, перемещая всасывающую насадку к местам, на которых находятся объекты очистки. Когда всасывающая насадка перемещается, корпус пылесоса перемещается по направлению к пользователю при помощи соединительной трубки. Из-за этого такой обычный пылесос может создавать проблему неудобства наклоненного положения для пользователя, который чувствителен к весу корпуса пылесоса.
Однако пылесос в соответствии с настоящим изобретением включает в себя корпус, который может самостоятельно отслеживать положение пользователя или положение всасывающей насадки для устранения недостатка обычного пылесоса.
Для устранения недостатка обычного пылесоса, упомянутого выше, пылесос 100 в соответствии с данным вариантом осуществления может дополнительно включать в себя устройство 5 обработки изображения, расположенное в корпусе 1, для фотографирования изображения передней стороны корпуса и распознавания информации о корпусе и относительном положении установленной мишени из сфотографированного изображения передней стороны, приводной модуль 4, выполненный с возможностью перемещения корпуса, и контроллер 8, выполненный с возможностью управления приводным модулем, чтобы расстояние между корпусом и мишенью находилось в диапазоне предварительно установленного опорного расстояния на основании информации о положении, выдаваемой устройством обработки изображения.
В этом случае контроллер 8 (см. фиг.2) перемещает корпус в предварительно установленное опорное расстояние (то есть в диапазоне опорного расстояния) на основании информации о положениях корпуса и мишени, которая выдается устройством 5 обработки изображения.
Фиг.2 - концептуальная схема контроллера в соответствии с данным вариантом осуществления. Как указано ниже, устройство 5 обработки изображения и контроллер 8 будут описаны подробно.
Устройство 5 обработки изображения фотографирует мишень (пользователя или всасывающую насадку), которая является объектом отслеживания, расположенным рядом с корпусом, для получения информации, используемой для определения расстояния между корпусом и мишенью и направления к месту, где расположена мишень от корпуса. Устройство 5 обработки изображения может включать в себя модуль 51 фотографирования изображений (см. фиг.1), расположенный на передней поверхности корпуса, модуль 53 отделения изображения, отделяющий изображение объекта отслеживания (в дальнейшем, изображение мишени) от изображения, полученного от модуля фотографирования изображения, и запоминающее устройство 55, в котором могут храниться данные расстояния и угла относительно точки, расположенной на изображении передней стороны.
Модуль 51 фотографирования изображения расположен на передней поверхности корпуса 1 в качестве средства, используемого для фотографирования изображения (то есть получения изображения передней стороны), включающего в себя мишень объекта отслеживания (то есть пользователя или всасывающей насадки). В данном документе модуль 51 фотографирования изображения может быть расположен на передней поверхности корпуса с углом фотографирования, который может изменяться вверх/вниз и вправо/влево. Причина, почему угол фотографирования модуля фотографирования изображения может изменяться, состоит в том, что положение модуля фотографирования изображения должно изменяться контроллером или пользователем для изменения диапазона фотографирования изображения передней стороны.
При этом модуль 53 отделения изображения установлен для отделения изображения мишени, которое является изображением объекта отслеживания пользователя или всасывающей насадки, от сфотографированного изображения передней стороны. Модулем 53 отделения изображения может быть любой тип устройства или алгоритма, которые только могут отделять конкретное изображение, имеющееся в изображении. Как указано ниже, пример модуля отделения изображения описан со ссылкой на фиг.3.
Фиг.3 - концептуальная схема изображения передней стороны, полученного модулем 51 фотографирования, и изображения мишени, отделенного модулем 53 отделения изображения.
Модуль 51 фотографирования в соответствии с данным вариантом осуществления может фотографировать изображение передней стороны по меньшей мере два раза через предварительно заданный интервал. Фиг.3(a) иллюстрирует пример изображения передней стороны, включающего в себя пользователя (U) или всасывающую насадку 2, которые являются объектом отслеживания. В этом случае модуль 53 отделения изображения сравнивает два из изображений передней стороны, сфотографированных по меньшей мере два раза, друг с другом, для определения и отделения изображения мишени.
Изображением мишени является изображение объекта отслеживания, которое будет распознавать корпус. Модуль 53 отделения изображения сравнивает два изображения передней стороны, сфотографированных модулем фотографирования изображения, друг с другом, и он определяет объект, имеющий большее изменение положения в качестве изображения мишени.
Другими словами, пользователь пылесосит с перемещением всасывающей насадки к объекту очистки. Из-за этого местоположение пользователя (U) или всасывающей насадки 2 изменяется больше, чем местоположение заднего плана (J) на изображении передней стороны. Модуль 53 отделения изображения сравнивает по меньшей мере два из изображений передней стороны друг с другом, и объект, имеющий наибольшее изменение положения (то есть пользователь или всасывающая насадка), устанавливается в качестве изображения мишени.
Как только установлено изображение мишени, модуль 53 отделения изображения отделяет изображение мишени от последнего одного из двух изображений передней стороны, сфотографированных через предварительно заданный интервал. Фиг.3(b) изображает отделенное изображение пользователя, установленное в качестве изображения мишени (T).
Когда изображение мишени отдельно от изображения передней стороны, контроллер 8 определяет расстояние между корпусом 1 и мишенью на основании данных расстояния, хранящихся в запоминающем устройстве 55, и угла направления к мишени от корпуса.
В запоминающем устройстве 55 могут храниться экспериментальные данные расстояния между корпусом и мишенью, расположенной в точке в изображении передней стороны, сфотографированного модулем фотографирования (в дальнейшем, данные расстояния), и данные угла направления к мишени от корпуса (в дальнейшем, данные угла). Фиг.4 - пример данных расстояния и данных угла, хранящихся в запоминающем устройстве.
В соответствии с данными расстояния и данными угла, хранящимися в запоминающем устройстве, изображенном на фиг.4, эти данные представляют информацию о том, что мишень удалена на расстояние RL1 от корпуса под углом RA1, когда изображение мишени расположено в точке “A” на изображении (I) передней стороны, и о том, что мишень удалена на расстояние RL2 под углом RA2, когда изображение мишени расположено в точке “B”.
В результате контроллер 8 сравнивает местоположение изображения мишени, полученного при помощи модуля 53 отделения изображения, с данными, хранящимися в запоминающем устройстве, так что он может точно определить, как далеко находятся пользователь или всасывающая насадка, которые являются объектом отслеживания, от корпуса 1 (расстояние) и в каком направлении мишень расположена относительно корпуса.
Устройство 5 обработки изображения может дополнительно включать в себя датчик 57, содержащий датчик 571 расстояния и датчик 573 направления. В этом случае контроллер 8 может быть выполнен с возможностью приема информации о расстоянии и угле, выдаваемой датчиком 571 расстояния и датчиком 573 направления. Здесь датчик 571 расстояния определяет расстояние посредством сравнения изображения мишени с данными расстояния, хранящимися в запоминающем устройстве. Датчик 573 направления может определять угол направления к мишени от корпуса посредством сравнения изображения мишени с данными угла из запоминающего устройства.
При этом изображением мишени может быть тип, занимающий заранее заданную область изображения передней стороны посредством сбора множества точек, которые должны быть отделены, отличный от типа единственной точки, изображенной на фиг.3(b).
В этом случае контроллер может определять данные расстояния, соответствующие самому нижнему концу изображения мишени, и данные угла на основании расстояния между корпусом и мишенью и угла направления к мишени от корпуса.
Причина, почему положение самого нижнего конца изображения мишени используется в качестве опорной точки определения для определения расстояния и угла между корпусом и мишенью, состоит в том, что ноги пользователя будут опорной точкой, если пользователь является мишенью, и граница с полом будет опорной точкой определения, если мишенью является всасывающая насадка.
Посредством процесса, упомянутого выше, определяются расстояние и угол пользователя или всасывающей насадки от корпуса. После этого контроллер 8 сравнивает расстояние с предварительно заданным опорным расстоянием и управляет корпусом 1 для перемещения в пределах опорного расстояния.
Другими словами, когда расстояние больше или меньше опорного расстояния, контроллер 8 управляет колесами 41 (см. фиг.1) с использованием электродвигателя 43 приводного модуля 4 для перемещения корпуса 1 в пределах опорного расстояния.
При этом диапазон, имеющий верхний предел и нижний предел (диапазон опорного расстояния), может быть установлен в качестве опорного расстояния. В этом случае контроллер 8 управляет корпусом 1 для перемещения в положение, в котором расстояние входит в диапазон опорного расстояния.
Кроме того, диапазон опорного расстояния может быть предварительно задан и сохранен предприятием-изготовителем либо установочная часть (не показана) может быть дополнительно обеспечена в пылесосе, чтобы дать возможность пользователю вводить желаемое опорное расстояние или диапазон опорного расстояния в установочную часть при удобном случае.
При расположении корпуса в пределах опорного расстояния (диапазона опорного расстояния) посредством перемещения корпуса предпочтительно, чтобы контроллер 8 поворачивал корпус на угол направления к мишени от корпуса в пределах предварительно установленного опорного угла (или диапазона опорного угла).
Для этого электродвигатель 43 может быть обеспечен для каждого из пары колес 41, расположенных на обоих концах корпуса. Положение корпуса может изменяться перед перемещением корпуса, во время и после перемещения корпуса.
Фиг.5 и 6 - концептуальные схемы, иллюстрирующие пылесос в соответствии с другим вариантом осуществления настоящего изобретения и контроллер, расположенный в пылесосе в соответствии с данным вариантом осуществления. Как изложено ниже, описан пылесос в соответствии с данным вариантом.
В отличие от варианта осуществления, упомянутого выше, пылесос в соответствии с данным вариантом осуществления дополнительно включает в себя светоизлучающий модуль 6. Как изложено ниже, описан светоизлучающий модуль, который имеет другую конфигурацию в отличие от вышеупомянутого варианта осуществления, изображенного на фиг.1.
Светоизлучающий модуль 6 обеспечен для излучения света по направлению к модулю 51 фотографирования изображения. Как показано на фиг.5, светоизлучающий модуль 6 может быть расположен на задней поверхности всасывающей насадки, и он может включать в себя первый и второй светоизлучающие модули 61 и 63, которые расположены на заданном расстоянии друг от друга.
В этом случае устройство 5 обработки изображения определяет расстояние между всасывающей насадкой 2 и корпусом 1 на основании расстояния, полученного на изображении передней стороны светами, излученными от светоизлучающего модуля 6. Устройство 5 обработки изображения распознает направление к всасывающей насадке от корпуса на основании позиции в изображении передней стороны, сфотографированном при помощи светов.
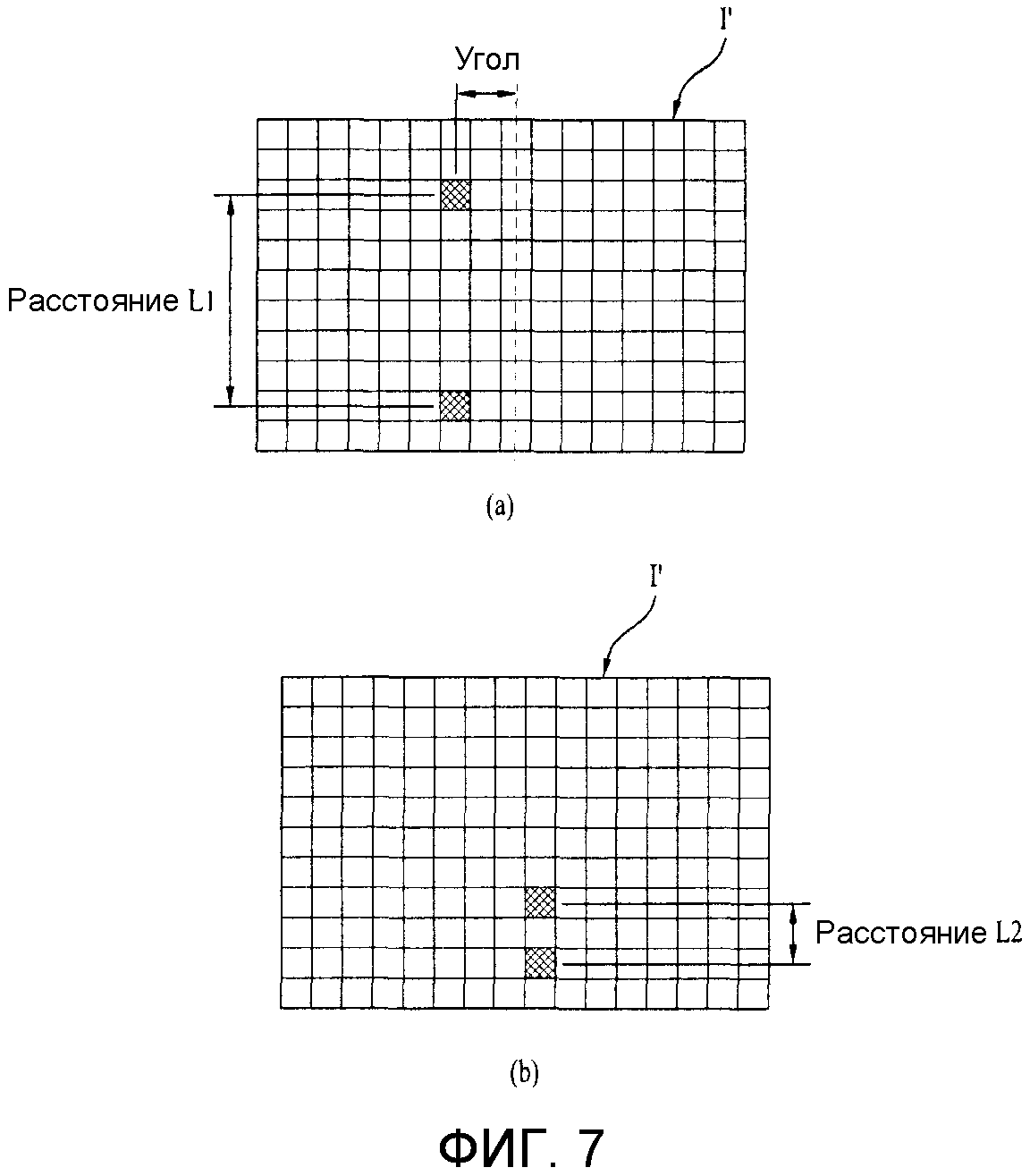
Фиг.7 - концептуальная схема изображения передней стороны. Как изложено ниже, описан пример изображения передней стороны, получаемого модулем фотографирования изображения пылесоса, имеющего светоизлучающий модуль.
Света, излученные из первого светоизлучающего модуля 61 и второго светоизлучающего модуля 63, сфотографированы на изображении передней стороны модулем 51 для фотографирования изображения. Когда всасывающая насадка 2 расположена близко к корпусу, расстояние между сфотографированными светами будет относительно большим (L1), как показано на фиг.7(a). Когда всасывающая насадка 2 расположена далеко от корпуса, расстояние между сфотографированными светами будет относительно коротким (L2).
Само собой разумеется, изображение передней стороны, изображенное на фиг.7, может включать в себя изображение заднего плана, а также изображение светов, излученных из светоизлучающего модуля.
В результате устройство 5 для обработки изображения дополнительно включает в себя модуль 53 отделения изображения для отделения светов, излученных из светоизлучающего модуля 6, от заднего плана в отличие от варианта осуществления, изображенного на фиг.6. В этом случае модуль 53 отделения изображения может устанавливать самый яркий из объектов в изображении передней стороны в качестве изображения мишени.
Здесь светоизлучающий модуль 6 может быть обеспечен для излучения только света с конкретной длиной волны, такой как инфракрасный свет, и модуль 51 фотографирования изображения включает в себя фильтр (не показан) для пропускания через него только этого света, излученного из светоизлучающего модуля. Если это так, устройство 5 обработки изображения может фотографировать только светоизлучающий модуль 6 на изображении передней стороны без использования модуля 53 отделения изображения.
При получении изображения передней стороны, имеющего сфотографированные света, которые излучаются светоизлучающим модулем 6, от модуля 51 для фотографирования изображения, контроллер 8 сравнивает данные расстояния, хранящиеся в запоминающем устройстве 55, с расстоянием между светами, сфотографированными на изображении передней стороны, для определения расстояния между мишенью и корпусом. Контроллер 8 сравнивает данные угла, хранящиеся в запоминающем устройстве 55, с положениями светов, сфотографированных на изображении передней стороны, для определения угла направления к мишени от корпуса.
Данными расстояния являются данные расстояния между мишенью (то есть всасывающей насадкой) и корпусом 1, соответствующие расстоянию, образованному двумя из точек, расположенных на изображении передней стороны. Данными угла являются данные угла направления к мишени от корпуса 1, соответствующие одной из точек, расположенных на изображении передней стороны.
Фиг.8(a) - пример данных, хранящихся в запоминающем устройстве, в случае, если светоизлучающий модуль 6 расположен на заданном расстоянии от всасывающей насадки 2 в вертикальном направлении. Фиг.8(b) - пример данных, хранящихся в запоминающем устройстве, в случае, если светоизлучающий модуль 6 расположен на заданном расстоянии от всасывающей насадки в горизонтальном направлении.
Как изложено ниже, процесс определения расстояния и направления (то есть угла) между корпусом и мишенью будет описан подробно со ссылкой на фиг.8(a). В данном документе считается, что света, излученные из светоизлучающего модуля, сфотографированы в точке “E”, расположенной на изображении (I') передней стороны. В этом случае контроллер определяет данные (R15) расстояния, хранящиеся в запоминающем устройстве, в качестве расстояния между корпусом и мишенью, и данные (RA5) угла, хранящиеся в запоминающем устройстве, в качестве направления (угла) к мишени от корпуса.
Фиг.8(a) показывает, что центр изображения передней стороны установлен в качестве опорной точки данных угла. В качестве альтернативы заданный конец изображения передней стороны может быть установлен в качестве опорной точки данных угла.
В данном документе при установке светоизлучающего модуля в горизонтальном направлении относительно всасывающей насадки, как показано на фиг.8(b), контроллер может определять опорный угол (RA8 из H), соответствующий одному из двух сфотографированных светов, в качестве угла расстояния, или он может определять опорный угол (RA7 из G), соответствующий центральной точке между светами, излученными из светоизлучающего модуля, в качестве угла расстояния.
Устройство 5 обработки изображения может дополнительно включать в себя датчик 57, содержащий датчик 571 расстояния и датчик 573 направления. Контроллер 8 может быть выполнен с возможностью приема информации о расстоянии и угле, выдаваемой датчиком 571 расстояния и датчиком 573 направления. В этом случае датчик 571 расстояния определяет расстояние посредством использования данных расстояния между светоизлучающими модулями, сфотографированными на изображении передней стороны, и данных расстояния, хранящихся в запоминающем устройстве. Датчик 573 направления может определять угол направления к мишени от корпуса посредством сравнения положения светоизлучающего модуля, сфотографированного на изображении передней стороны, с данными угла, хранящимися в запоминающем устройстве.
При определении расстояния и направления всасывающей насадки, которая является объектом отслеживания, от корпуса посредством процесса, упомянутого выше, контроллер 8 сравнивает предварительно заданное опорное расстояние с расстоянием, на которое необходимо переместить корпус, чтобы располагаться в пределах опорного расстояния.
Другими словами, когда расстояние больше и меньше опорного расстояния, контроллер 8 управляет колесами 41 (см. фиг.1) с использованием электродвигателя 43 приводного модуля 4 для перемещения корпуса с целью его расположения в пределах опорного расстояния. В этом случае диапазон, имеющий верхний предел и нижний предел (диапазон опорного расстояния), может быть установлен в качестве опорного расстояния.
При расположении корпуса в пределах опорного расстояния (или диапазона опорного расстояния) посредством перемещения корпуса предпочтительно, чтобы контроллер 8 поворачивал корпус для расположения угла направления к мишени от корпуса в пределах предварительно установленного опорного угла (или диапазона опорного угла).
Причина состоит в том, что расстояние, на которое перемещается корпус, является расстоянием от текущего положения корпуса до окружности круга, имеющего радиус, который равен опорному расстоянию (диапазону опорного расстояния) от объекта отслеживания. Ввиду этого, если корпус, перемещающийся в положение, расположенное в пределах опорного расстояния, находится по направлению к объекту отслеживания, который является центром окружности, путь перемещения корпуса может быть уменьшен настолько, насколько это возможно.
В этом случае электродвигатель 43 может быть обеспечен для каждого из пары колес 41, расположенных на обоих концах корпуса. Положение корпуса может изменяться перед перемещением корпуса, во время и после перемещения корпуса.
Фиг.9 - схема последовательности операций, иллюстрирующая процесс управления пылесосом, и процесс управления пылесосом в соответствии с настоящим изобретением описан, как изложено ниже.
При введении команды приведения в действие пылесоса устройство 51 для фотографирования фотографирует изображение передней стороны, имеющее пользователя или всасывающую насадку, которые являются мишенью (S100). Модуль 53 отделения изображения устанавливает изображение мишени из по меньшей мере двух изображений передней стороны, сфотографированных через предварительно заданный интервал, и отделяет изображение мишени от окончательного изображения сфотографированных изображений передней стороны (S200).
После этого контроллер 8 определяет расстояние и угол (или направление) мишени от корпуса посредством сравнения изображения мишени с данными расстояния и данными угла, хранящимися в запоминающем устройстве 55 (S300).
При определении относительного положения между корпусом и пользователем или всасывающей насадкой, которые являются объектом отслеживания, контроллер 8 определяет, принадлежит ли расстояние между корпусом и объектом отслеживания диапазону предварительно установленного опорного расстояния (или опорному расстоянию) (S400).
Когда расстояние принадлежит диапазону опорного расстояния, он определяет, принадлежит ли угол направления к мишени от корпуса диапазону опорного угла (S410).
Если угол направления к мишени от корпуса расположен в пределах диапазона опорного угла, контроллер 8 может не изменять положения корпуса. Если угол направления к мишени от корпуса выходит за пределы диапазона опорного угла, контроллер 8 поворачивает корпус 1 для расположения угла в пределах диапазона опорного угла (изменение положения, S430).
Когда определено, что расстояние не расположено в пределах диапазона опорного расстоянии, контроллер 8 управляет приводным модулем 4 для перемещения корпуса в позицию, расположенную в пределах диапазона опорного расстояния.
Предпочтительно, чтобы этап (S500) определения направления перемещения для минимизации пути перемещения корпуса выполнялся перед перемещением корпуса.
Другими словами, когда угол направления к мишени от корпуса расположен в пределах диапазона опорного угла, контроллер 8 перемещает корпус в диапазон опорного расстояния (S530). Когда угол направления к мишени от корпуса выходит за пределы диапазона опорного угла, контроллер перемещает корпус на опорное расстояние после поворота корпуса к мишени (S510).
В данном документе изменение положения корпуса может выполняться в процессе перемещения корпуса на опорное расстояние.
При завершении перемещения корпуса контроллер 8 определяет, сгенерирован или нет сигнал завершения очистки (S600). Когда сигнал завершения очистки не сформирован на основании результата определения, этап, упомянутый выше, повторяется под управлением контроллера 8 модуля 51 для фотографирования для повторного фотографирования изображения передней стороны (S610).
Специалисты в данной области техники должны понимать, что возможны модификации и изменения в настоящем изобретении без отхода от сущности или объема настоящего изобретения. Таким образом, подразумевается, что настоящее изобретение включает в себя модификации и изменения настоящего изобретения при условии, что они входят в объем прилагаемой формулы изобретения и ее эквивалентов.
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос и способ управления пылесосом
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина
Стиральная машина и способ стирки
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос и способ управления пылесосом
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина
Стиральная машина и способ стирки

