Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Вид РИД
Изобретение
Изобретение относится к области электротехники, а именно к способам управления электромагнитным моментом асинхронного двигателя с короткозамкнутым ротором, получающего питание от автономного инвертора напряжения, в котором в качестве силовых полупроводниковых ключей используются полностью управляемые транзисторы IGBT (Integrated Gate of Bipolar Transistor).
Известен способ управления величиной электромагнитного момента асинхронного электродвигателя с короткозамкнутым ротором (патент RU №2132110, опубл. 20.06.1999).
Способ векторного управления асинхронным электродвигателем, при котором питают статорные обмотки переменным током, амплитуду и угол фазового сдвига которого относительно вектора потокосцепления ротора регулируют, при этом фазные токи равны разности синхронно изменяемых с частотой синхронизации синфазного и ортофазного токов, заданный момент изменяют в зависимости от рассогласования заданной и текущей скорости, при этом измеряют токи в трех фазах статора, дополнительно измеряют напряжения в трех фазах статора, преобразуют измеренные в трех фазах токи и напряжения в двухфазную систему синфазного и ортофазного токов и напряжений, затем определяют действительную амплитуду синфазного и ортофазного токов, а также вычисляют путем интегрирования разности преобразованных напряжений и падения напряжений, пропорциональных преобразованным токам, амплитуду потокосцепления ротора и величины синусной и косинусной функций фазы потокосцепления ротора, при этом в зависимости от действительной амплитуды ортофазного тока изменяют заданную амплитуду синфазного тока из условия изменения угла фазового сдвига вектора тока статора относительно вектора потокосцепления ротора в диапазоне больше 45°, а величину заданной амплитуды ортофазного тока изменяют пропорционально отношению заданного момента и вычисленной амплитуды потокосцепления ротора, текущую скорость вращения вычисляют путем суммирования частоты скольжения с частотой синхронизации, равной нормированной синусной и косинусной функций фазы потокосцепления ротора, пропорционально которым регулируют ортофазный и синфазный токи, амплитуда которых изменяется в зависимости от рассогласования заданной и действительной амплитуд синфазных и ортофазных токов.
Недостатками способа являются высокая сложность алгоритма и большой объем вычислений в процессе регулирования. При использовании таких способов существует прямая зависимость качества регулирования от точности выполняемых измерительных и вычислительных операций. Данные недостатки снижают качество управления электромагнитным моментом при высокодинамичном изменении момента сопротивления и частой смене условий эксплуатации электропривода.
Известен способ управления величиной электромагнитного момента (патент US 4678248, опубл. 07.07.1987). Способ требует установки датчиков напряжения, токов, положения ротора, идентификатора переменных электропривода, преобразователя координат и блока компараторов. Способ содержит двухконтурный канал управления. Сигнал уставки на определенное значение момента сравнивается с вычисленным значением и поступает на вход ПИД регулятора, выходной сигнал которого является задающим сигналом внутреннего контура потокосцепления статора. Внутренний контур содержит элемент сравнения заданного и вычисленного значения потокосцепления. Затем выходные сигналы с элементов сравнения внутреннего и внешнего контуров поступают на два компаратора, после чего в блок переключателей, сигналы из которого поступают на драйверы силовых ключей.
Недостатком указанного способа является высокая сложность из-за большого количества датчиков обратных связей: два датчика напряжения, два датчика тока и датчик положения ротора. Эта схемная сложность влечет за собой трудности в настройке, требует периодической подстройки во время эксплуатации и снижает надежность (вероятность безотказной работы). Способ подразумевает использование блока компараторов. Наличие данных компараторов также усложняет способ формирования алгоритма управления ключами инвертора и снижает надежность.
Известен способ управления величиной электромагнитного момента электрической машины переменного тока (патент RU №2395157, опубл. 20.07.2010), принятый за прототип. Способ предполагает использование одного канала управления моментом. Сначала устанавливают заданное значение электромагнитного момента, измеряют и вычисляют значения фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, определяют знаки выражений (Sc-Sb)(MZ-M); (Sa-Sc)(MZ-M); (Sb-Sa)(MZ-M), где Sa, Sb, Sc - потокосцепления обмоток статора электрической машины в трехфазной неподвижной системе координат а-b-с; MZ, М - заданное и действительное значения электромагнитного момента двигателя, и формируют фазные напряжения на обмотках двигателя в соответствии с определенными условиями.
Недостаток данного способа заключается в том, что в алгоритме управления ключами инвертора кроме релейных регуляторов участвует подключающее устройство управления. При появлении запаздывания сигнала включения (выключения) от подключающего устройства, ключи инвертора будут открываться (закрываться) с задержкой. При появлении «дребезга» контактов подключающего устройства будут происходить самопроизвольные открытия и закрытия полупроводниковых ключей. Таким образом, управление ключами инвертора может выйти из под контроля. Процесс формирования вектора напряжения приобретает случайный характер, следовательно, управление электромагнитным моментом становится невозможным.
Другим недостатком данного способа является то, что управление электромагнитным моментом осуществляется по одному каналу управления, что снижает качество и точность управления.
Техническим результатом является увеличение точности и быстродействия системы управления электромагнитным моментом, снижение чувствительности системы автоматического управления к неточности информации, поступающей от отдельных ее элементов.
Технический результат достигается тем, что в способе управления величиной электромагнитного момента асинхронного электродвигателя с короткозамкнутым ротором, получающего питание от автономного инвертора напряжения, включающем установку заданного значения электромагнитного момента, измерение текущего значения тока в обмотках статора, вычисление текущих значений потокосцепления статора и электромагнитного момента, вычисление и формирование фазных напряжений, устанавливают заданное значение модуля вектора электромагнитного момента и модуля вектора потокосцепления статора, измеряют текущее значение входного постоянного напряжения автономного инвертора напряжения и вычисляют текущее значение угла поворота вектора потокосцепления статора, регулирование текущих значений модулей векторов электромагнитным моментом и потокосцеплением статора осуществляют по двум каналам, в которых используют релейные регуляторы электромагнитного момента и потокосцепления статора, при этом выходной вектор напряжения автономного инвертора напряжения выбирают по таблице переключения с возможностью поддержания угла между текущим вектором потокосцепления статора и текущим вектором тока статора постоянным и формируют его путем управления силовыми полупроводниковыми ключами автономного инвертора напряжения.
В качестве регулятора электромагнитного момента используют двухпозиционный релейный регулятор с гистерезисной петлей без зоны нечувствительности, а в качестве регулятора потокосцепления статора используют трехпозиционный релейный регулятор с гистерезисной петлей с зоной нечувствительности.
В таблице переключения по текущему значению угла поворота вектора потокосцепления статора выбирают столбец таблицы переключения, а по значению выходных сигналов релейных регуляторов электромагнитного момента и потокосцепления выбирают строку таблицы переключения.
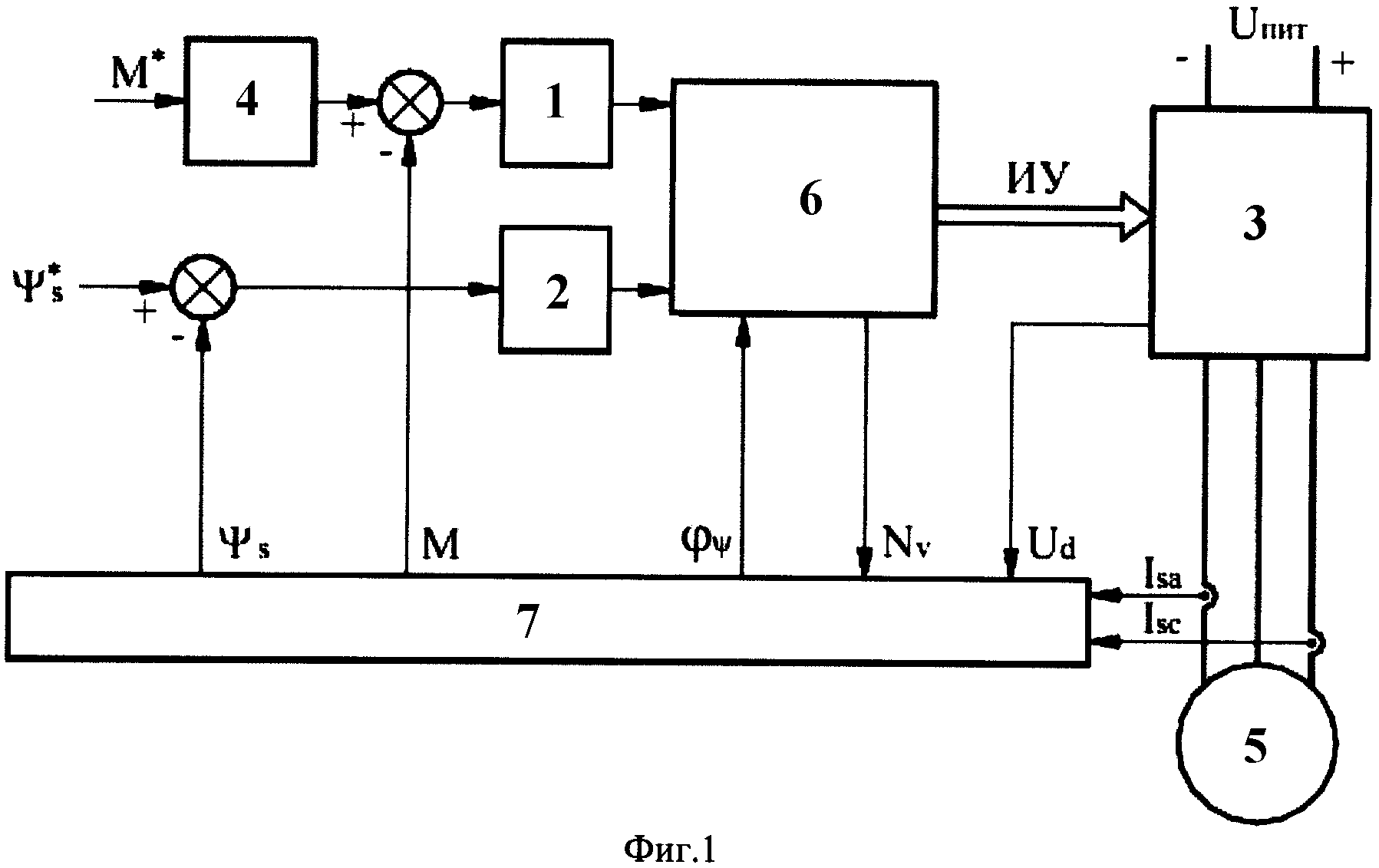
Структурная схема технической реализации способа показана на фиг.1, где 1 - РРЭМ - релейный регулятор электромагнитного момент; 2 - РРПС - релейный регулятор потокосцепления статора; 3 - АИН - автономный инвертор напряжения; 4 - ЗИ - задатчик интенсивности; 5 - АД - асинхронный двигатель; 6 - блок выбора вектора напряжения, 7 - идентификатор переменных.
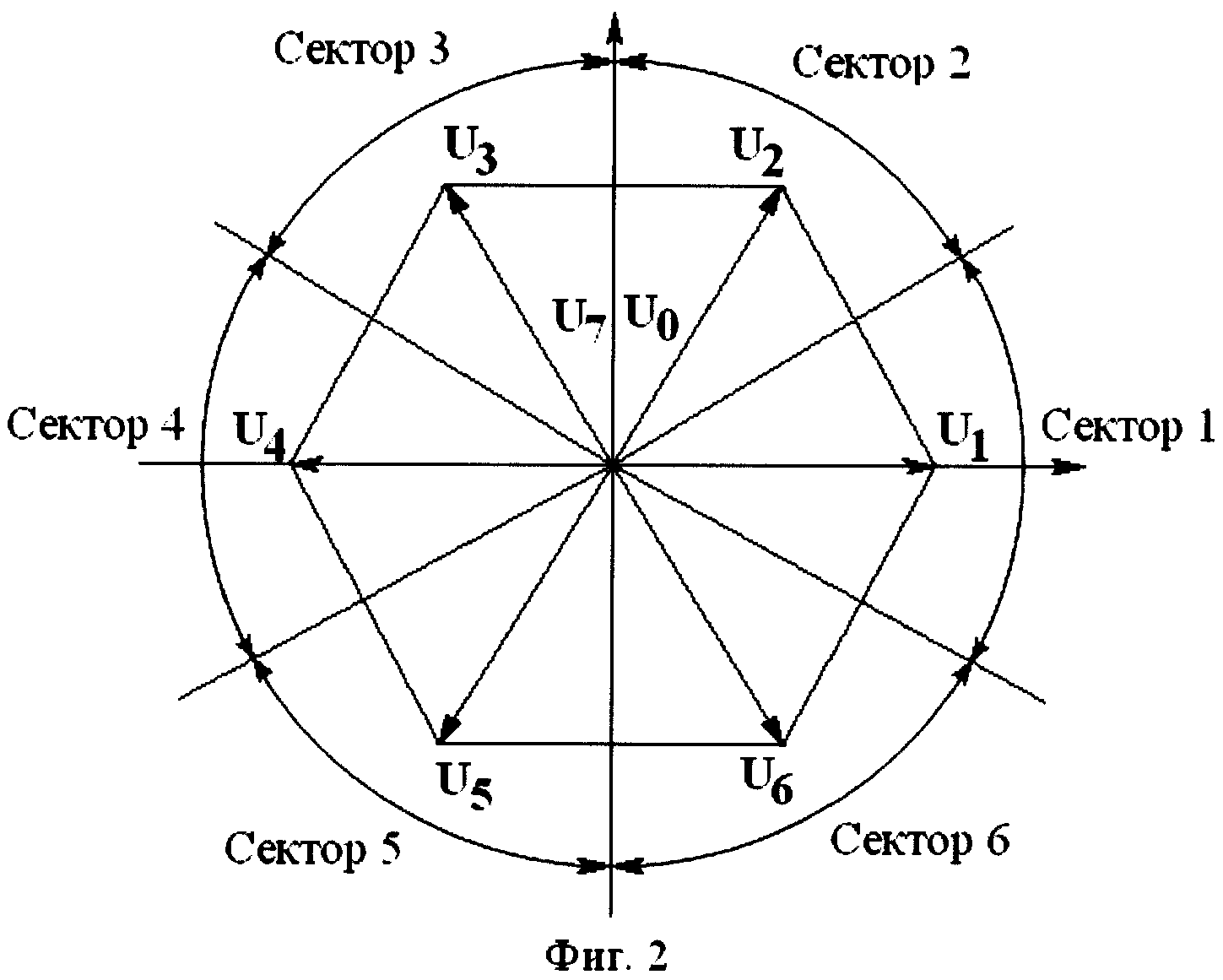
В автономном инверторе напряжения 3 силовые полупроводниковые ключи собраны по мостовой схеме. В цикле переключения силовых полупроводниковых ключей длительность паузы между включенными состояниями находится в интервале 0 эл.град.≤ΔТ<60 эл.град. Годограф выходного вектора напряжения автономного инвертора 3 имеет форму правильного шестиугольника, вершины которого соответствуют установившимся положениям этого вектора в периоды между коммутациями силовых полупроводниковых ключей. Годограф представлен на фиг.2.
В идентификаторе переменных 7 по измеренным текущим значениям модуля вектора тока в обмотках статора, текущему значению входного постоянного напряжения и коммутационной функции силовыми полупроводниковыми ключами автономного инвертора напряжения 3 вычисляют текущее значение угла поворота вектора потокосцепления статора, текущие значения модулей векторов потокосцепления статора и электромагнитного момента.
Производят вычисление проекций вектора тока статора на оси неподвижной системы координат (α-β) по следующим выражениям:

Производят вычисление проекций вектора выходного вектора напряжения автономного инвертора напряжения 3 на оси неподвижной системы координат (α-β) по следующим выражениям:

Затем вычисляют проекции вектора потокосцепления статора на оси неподвижной системы координат (α-β) по следующим выражениям:

Вычисляют текущие значение модуля вектора потокосцепления статора и текущие значение модуля электромагнитного момента по выражению
Вычисляют текущее значение угла поворота вектора потокосцепления статора по выражению:

Регулирование текущих значений модулей векторов потокосцепления статора и электромагнитного момента осуществляют по двум каналам, в которых используют релейные регуляторы электромагнитного момента 1 и потокосцепления статора 2.
Заданное значение модуля вектора электромагнитного момента устанавливают на вход канала регулирования текущего значения модуля вектора электромагнитного момента. Оно попадет на вход задатчика интенсивности 4, который приближает свой выход к заданному значению модуля вектора электромагнитного момента с заданным в нем темпом. После задатчика интенсивности 4 в канале регулирования текущего значения модуля вектора электромагнитного момента установлен релейный регулятор электромагнитного момента 1. На вход этого регулятора поступают заданное значение модуля вектора электромагнитного момента из задатчика интенсивности 4 и текущее значение модуля вектора электромагнитного момента из идентификатора переменных 7. В качестве релейного регулятора электромагнитного момент 1 используют двухпозиционный релейный регулятор с гистерезисной петлей без зоны нечувствительности.
Заданное значение модуля вектора потокосцепления статора устанавливают на вход канала регулирования текущего значения модуля вектора потокосцепления статора. Оно попадет на вход релейного регулятора потокосцепления статора 2. На вход этого регулятора 2 поступают заданное значение модуля вектора потокосцепления статора и текущее значение модуля вектора потокосцепления статора из идентификатора переменных 7. В качестве релейного регулятора потокосцепления статора 2 используют трехпозиционный релейный регулятор с гистерезисной петлей с зоной нечувствительности.
Выходные сигналы релейных регуляторов поступают на входы блока выбора вектора напряжения 6, который содержит таблицу переключения. Также на вход блока выбора вектора напряжения 6 поступает сигнал из идентификатора переменных 7 о текущем значении угла поворота вектора потокосцепления статора.
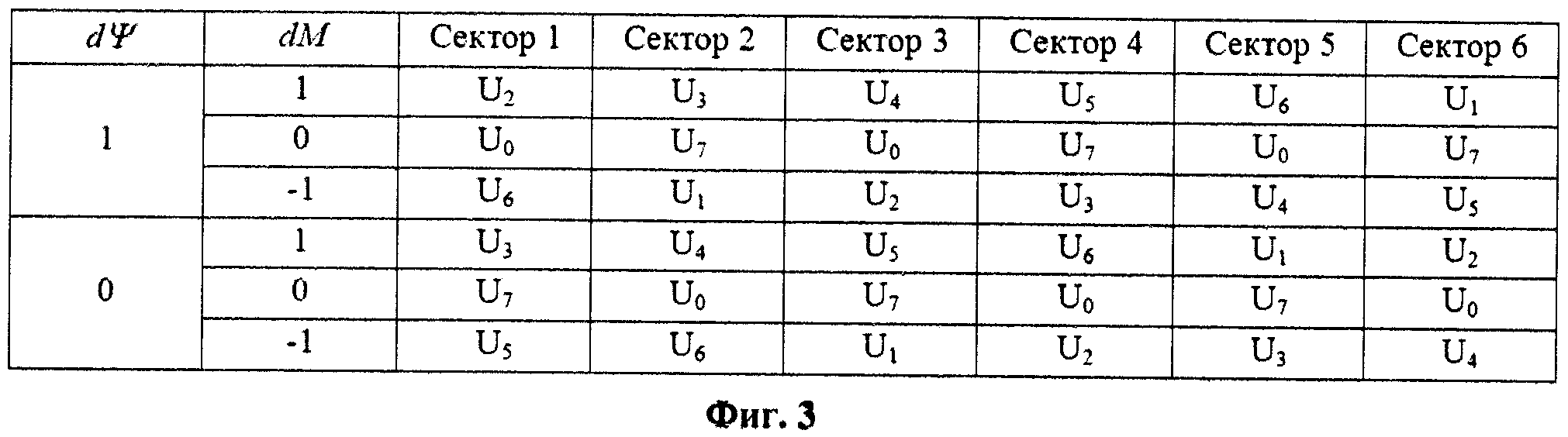
Таблица переключения представляет собой внутренне заполненную таблицу выбора выходного вектора напряжения автономного инвертора напряжения в соответствие с текущим углом поворота вектора потокосцепления статора, который определяет столбцы таблицы переключения и выходных сигналов релейных регуляторов электромагнитного момента и потокосцепления статора, которые определяют строки таблицы. Вид таблицы переключения представлен на фиг.3.
Определение столбцов таблицы переключения по текущем значении угла поворота вектора потокосцепления статора выполняют в соответствии со следующими неравенствами, определяющими принадлежность вектора тому или иному неравенству:







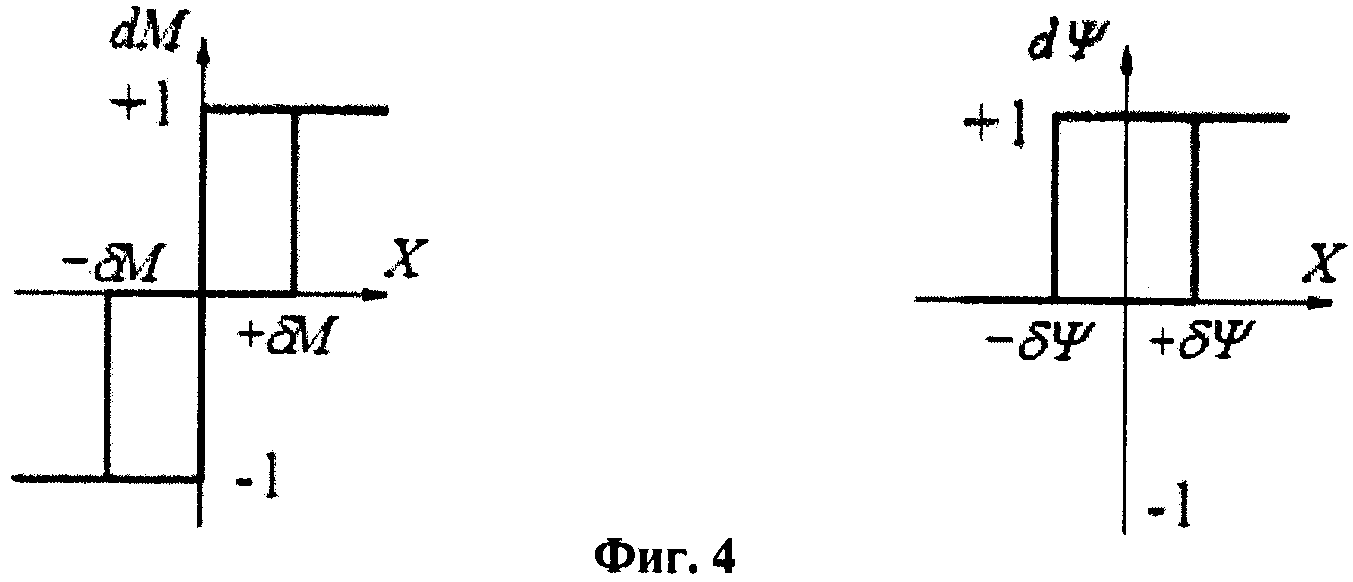
Определение строк таблицы переключения по выходным сигналам релейных регуляторов электромагнитного момента 1 и потокосцепления статора 2 (характеристики релейных регуляторов электромагнитного момента и потокосцепления статора релейных регуляторов представлены на фиг.4.) выполняют в соответствии со следующими выражениями:
- релейный регулятор электромагнитного момента 1:

- релейный регулятор потокосцепления статора 2:
Выбор выходного вектора напряжения автономного инвертора 3 напряжения осуществляют таким образом, чтобы поддерживать угол между текущим вектором потокосцепления статора и текущим вектором токов статора постоянным.
Эффективность такого алгоритма управления очень высока, так как релейные регуляторы имеют самое высокое быстродействие и не накапливают ошибок рассогласования.
Электромагнитный момент асинхронного электродвигателя 5 с короткозамкнутым ротором определяют три переменных электродвигателя: текущее значение модуля вектора потокосцепления статора и вектора тока статора, а также угол между этими векторами. В заявляемом способе регулирование всеми тремя переменными обеспечивают за счет введения канала регулирования текущих значений модулей векторов потокосцеплением статора, а также поддержание угла между текущим вектором потокосцепления и текущим вектором тока статора постоянным, а выбора выходного вектора напряжения автономного инвертора 3 напряжения по таблице переключения.
Таким образом, в заявленном способе управления электромагнитным моментом асинхронного электродвигателя 5 с короткозамкнутым ротором осуществляют регулирование всеми тремя переменными, которые определяют электромагнитный момент. Это позволяет увеличить точность и быстродействие системы управления электромагнитным моментом.
Способ управления применяют для управления электромагнитным моментом асинхронного электродвигателя 5 с короткозамкнутым ротором электропривода механизма поворота экскаватора.
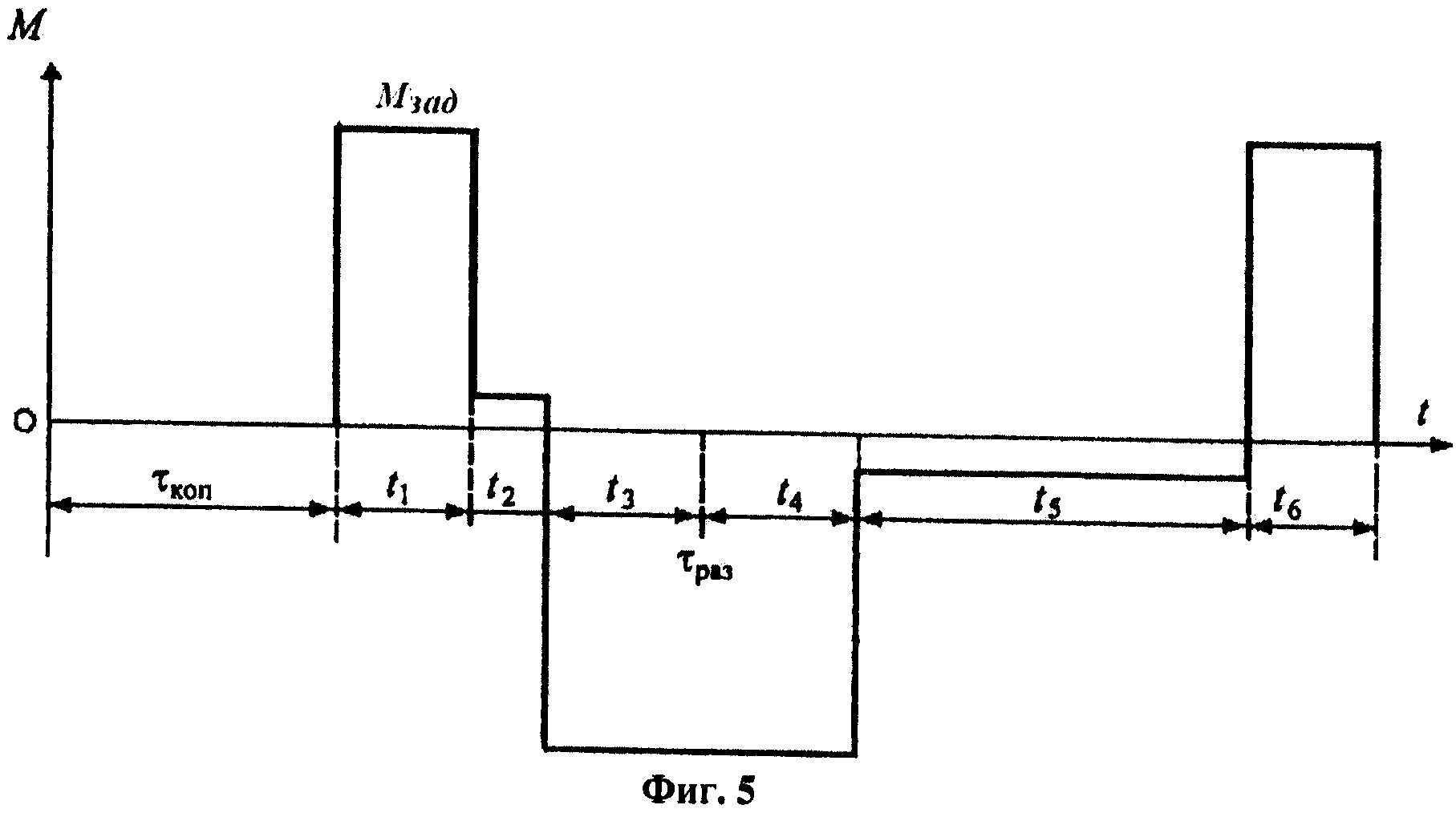
Заданное значение модуля вектора электромагнитного момента изменяют во времени в строгом соответствии с типовой нагрузочной диаграммой исполнительного органа поворота экскаватора, а заданное значение модуля вектора потокосцепления статора устанавливают на номинальное значение. Нагрузочная диаграмма исполнительного органа поворота экскаватора приведена на фиг.5.
На фиг.5 представлены следующие элементы рабочего цикла: t1, t2, t3 - соответственно разгон, движение с установившейся скоростью и торможение привода при повороте на разгрузку с груженым ковшом; t4, t5, t6 - соответственно разгон, движение с установившейся скоростью и торможение привода при повороте в забой с порожним ковшом.
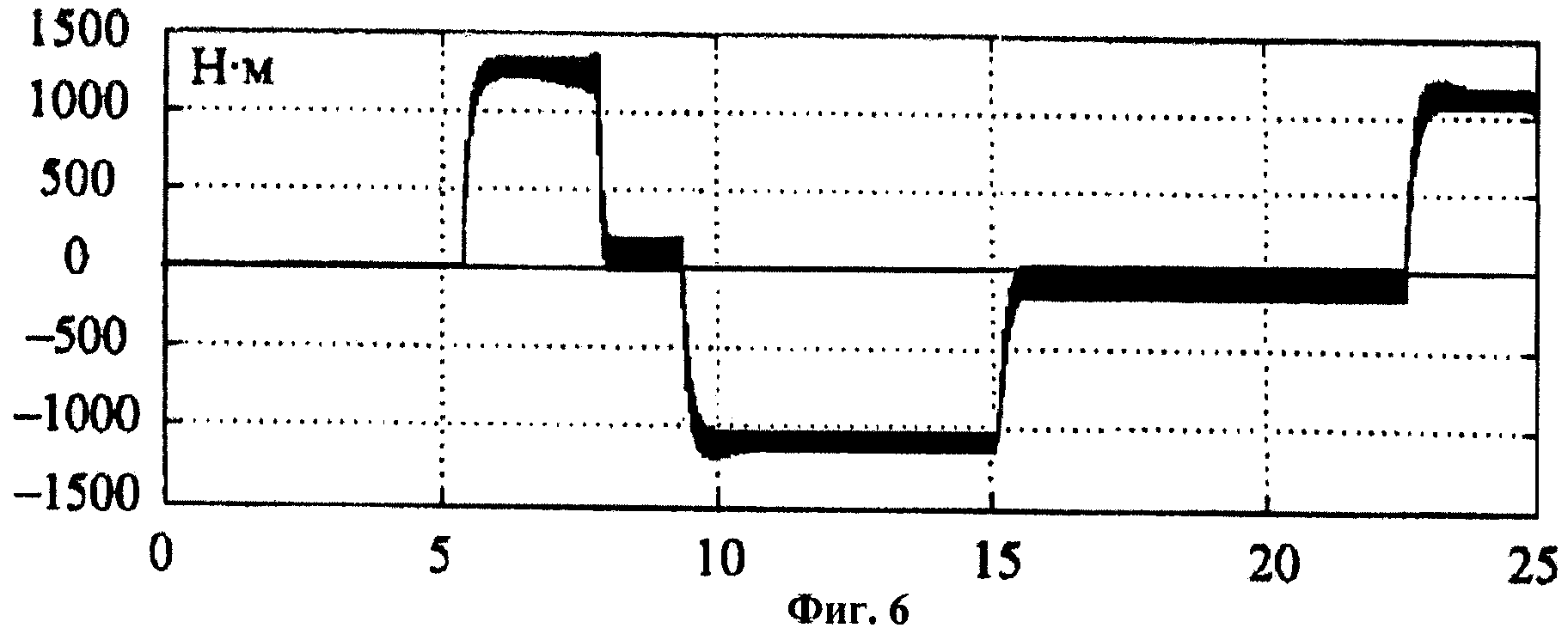
Способ управления электромагнитным моментом осуществляют следующим образом (фиг.1 и фиг.6).
Заданное значение модуля вектора электромагнитного момента устанавливают в соответствии с нагрузочной диаграммой работы исполнительного органа поворота экскаватора (фиг.5). Заданное значение модуля вектора потокосцепления статора устанавливают на номинальное значение. Измеряют текущее значение входного постоянного напряжения автономного инвертора напряжения и текущее значение модуля вектора тока статора. Вычисляют текущее значение модуля вектора электромагнитного момента и модуля вектора потокосцепления статора и угла поворота вектора потокосцепления статора (по формулам (1)-(5)). Регулирование текущих значений модулей векторов электромагнитным моментом и потокосцеплением статора осуществляют по двум каналам, в которых используют релейные регуляторы электромагнитного момента 1 и потокосцепления статора 2. Выбирают столбец таблицы переключения по текущему значению угла поворота вектора потокосцепления статора по неравенствам (6) и строку таблицы переключения по значению выходных сигналов релейных регуляторов электромагнитного момента 1 и потокосцепления 2 выбирают по выражениям (6). По пересечению указанных строки и столбца выбирают выходной вектор напряжения автономного инвертора напряжения 3 по таблице переключения (фиг.3) с возможностью поддержания угла между текущим вектором потокосцепления статора и текущим вектором тока статора постоянным.
Формируют его путем управления силовыми полупроводниковыми ключами автономного инвертора напряжения 3.
На фиг.6 представлены кривые изменения электромагнитных моментов асинхронного электродвигателя исполнительного органа поворота экскаватора.
Таким образом, способ позволяет увеличить точность и быстродействие системы управления электромагнитным моментом, снизить чувствительность системы автоматического управления к неточности информации, поступающей от отдельных ее элементов. А это позволяет улучшить динамические и эксплуатационные характеристики электропривода двигателя и повысить надежность электропривода.
Способ исследования ограненных драгоценных камней
Способ подготовки железорудного материала в виде брикетов для процесса прямого восстановления железа
Способ получения природного железоокисного пигмента из руды
Способ мониторинга атмосферного воздуха
Энергосберегающая система управления асинхронным электроприводом
Высокодинамичный бездатчиковый асинхронный электропривод с непосредственным управлением моментом
Электроприводная перекачивающая станция на морской платформе
Подземное хранилище сжиженного природного газа
Устройство для испытания образцов материалов при циклическом нагружении
Устройство для тепловой обработки газогидратных залежей
Способ управления электродуговым режимом плавки руднотермической печи при получении фосфора
Скребковый конвейер
Интегрированный перекачивающий агрегат для транспортировки углеводородов по подводным и континентальным трубопроводам
Способ управления автономным инвертором напряжения

