Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области автоматического управления динамическими объектами по заданной траектории.
Известен способ управления динамическими объектами, заключающийся в том, что по известным координатам состояния объекта определяют величину ошибки, равную разности между заданными входными координатами и соответствующими текущими координатами объекта. Команды управления объектом формируются в соответствии с величинами ошибки и коэффициентов пропорциональности, которые вычисляются на основе решения уравнения Риккати [Ройтенберг Я.Н. Автоматическое управление. - М.: Наука, 1978, с.225-226].
Недостатком указанного способа управления является невозможность в полной мере обеспечить высокую точность управления динамическими объектами в условиях, когда не удается точно определить заданные входные координаты.
Известен также способ стабилизации подводного аппарата по разомкнутому контуру в режиме его зависания вблизи или над объектом работ в процессе работы установленного на нем манипулятора, включающий подачу на входы двигателей всех степеней подвижности манипулятора сигналов, определяемых желаемой программной траекторией движения его рабочего органа в пространстве и формируемых на основе аналитических соотношений, полученных после решения обратной задачи кинематики для конкретной кинематической схемы манипулятора, а на входы соответствующих движителей подводного аппарата - сигналов, компенсирующих силовые и моментные воздействия на этот аппарат со стороны манипулятора, произвольно перемещающегося в вязкой среде, причем сигналы управления движителями подводного аппарата формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на подводный аппарат, учитывающих все эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости [Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. - М.: Круглый год, 2001, с.171-179; 223-227].
Данный способ является наиболее близким к предлагаемому изобретению.
Недостатком этого способа является невысокая точность стабилизации подводного аппарата в процессе перемещений манипулятора, поскольку разомкнутый контур стабилизации не позволяет обеспечить точную компенсацию даже точно вычисленных сил и моментов, с которыми этот манипулятор воздействует на подводный аппарат и которые неотвратимо смещают его относительно исходного положения, не позволяя манипулятору обеспечить точное перемещение по желаемой пространственной траектории. Кроме того, обеспечить точное вычисление силовых и моментных воздействий на этот аппарат со стороны движущегося манипулятора в силу приближенности определения силовых взаимодействий этого манипулятора с окружающей его вязкой средой также невозможно. В результате необходимо дополнительно корректировать программные сигналы управления манипулятором с учетом неизбежных текущих смещений подводного аппарата, на котором он установлен, от его исходного положения с целью точного перемещения рабочего органа манипулятора по желаемой траектории.
Задачей изобретения является устранение указанного выше недостатка, то есть, в частности, обеспечение требуемой высокой точности движения рабочего органа манипулятора по желаемой траектории с учетом неизбежных текущих отклонений подводного аппарата, вызванных возмущающими воздействиями со стороны работающего манипулятора от его исходного положения, для которого и рассчитывается желаемая пространственная траектория движения рабочего органа манипулятора.
Технический результат изобретения заключается в обеспечении дополнительной коррекции сигналов программного управления манипулятором с учетом текущего углового и линейного смещения подводного аппарата, на котором он установлен, от его исходного положения для обеспечения точного перемещения рабочего органа этого манипулятора по желаемой траектории.
Поставленная задача решается тем, что при реализации способа управления подводным манипулятором в режиме зависания подводного аппарата, включающего подачу на входы двигателей всех степеней подвижности манипулятора сигналов, определяемых желаемой программной траекторией движения его рабочего органа в пространстве и формируемых на основе аналитических соотношений, полученных после решения обратной задачи кинематики для конкретной кинематической схемы манипулятора, а на входы соответствующих движителей подводного аппарата - сигналов, компенсирующих силовые и моментные воздействия на этот аппарат со стороны манипулятора, произвольно перемещающегося в вязкой среде, причем сигналы управления движителями подводного аппарата формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на подводный аппарат, учитывающих все эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости, на борту подводного аппарата дополнительно устанавливают гироскопические датчики и навигационную систему, определяющие линейное и угловое смещения этого аппарата от его исходного положения при работающем манипуляторе, а на следящие приводы всех степеней подвижности манипулятора подают дополнительные сигналы управления, пропорциональные смещению этого подводного аппарата от его исходного положения, которые обеспечивают дополнительное перемещение рабочего органа манипулятора в пространстве и тем самым продолжение его точного движения желаемой программной траектории независимо от произвольных смещений подводного аппарата.
Сопоставительный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «…на борту подводного аппарата устанавливают гироскопические датчики и навигационную систему…» обеспечивает решение задачи определения величин и направлений линейных и угловых смещений подводного аппарата от его исходного положения при работающем манипуляторе.
Признак «на следящие приводы всех степеней подвижности манипулятора подают дополнительные сигналы управления, пропорциональные смещению подводного аппарата от его исходного положения…» обеспечивает дополнительное перемещение рабочего органа манипулятора в пространстве и тем самым его точное движение по желаемой программной траектории независимо от текущих произвольных смещений подводного аппарата.
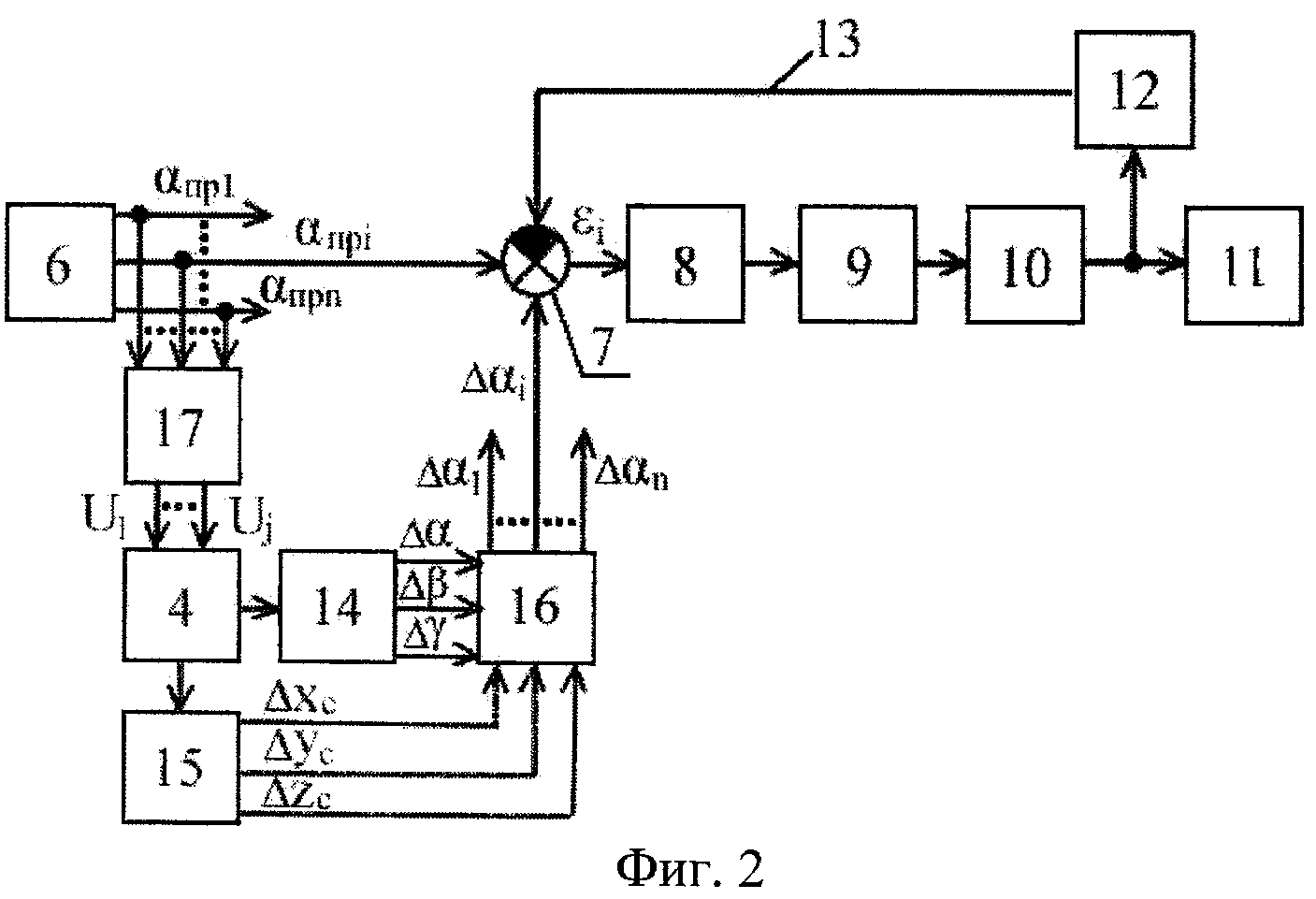
Заявленное изобретение иллюстрируется чертежами, где на фиг.1 схематически показано исходное положение подводного аппарата и исходное положение установленного на нем манипулятора, а также смещенное положение аппарата и новое положение манипулятора, учитывающее текущее смещение подводного аппарата относительно исходного, при котором неизменно происходит точное перемещение рабочего органа манипулятора по желаемой пространственной траектории; а на фиг.2 - схема одного канала управления одним движителем подводного аппарата и одним приводом манипулятора, установленным в одной из его степеней подвижности.
На чертежах показаны заданная (неизменная) желаемая пространственная траектория 1 движения рабочего органа манипулятора; подводный аппарат 2 в исходном положении; подводный манипулятор 3 в исходном положении; подводный аппарат 4 в положении, смещенном относительно исходного; новое положение 5 подводного манипулятора, обеспечивающее точное прохождение рабочего инструмента по желаемой пространственной траектории 1; блок 6 формирования программных сигналов управления приводами манипулятора; сумматор 7; корректирующее устройство 8; усилитель 9; двигатель 10 i-й степени подвижности манипулятора; сустав 11 i-й степени подвижности манипулятора; датчик 12 поворота в i-й степени подвижности манипулятора; линия 13 отрицательной обратной связи; блок 14 гироскопов; навигационная система 15; блок 16 формирования сигналов дополнительных перемещений в каждой степени подвижности манипулятора; блок 17 формирования сигналов управления движителями подводного аппарата, обеспечивающими приближенную компенсацию силового F и моментного М воздействия на подводный аппарат со стороны работающего манипулятора.
Кроме того, на чертежах показаны С - центр масс подводного аппарата; А - текущая точка на желаемой траектории перемещения рабочего органа манипулятора; αnpi - сигнал программного управления i-й степенью подвижности манипулятора; εi - текущая ошибка управления приводом i-й степени подвижности манипулятора; Δα, Δγ, Δβ - соответственно текущие отклонения подводного аппарата по курсу, крену и дифференту от его исходного положения; Δхс, Δγс, Δzc - соответствующие отклонения точки С от ее исходного положения по соответствующим осям абсолютной системы координат; Δαi - дополнительный сигнал управления приводом i-й степени подвижности манипулятора; Uj - сигнал управления j-м движителем подводного аппарата;  n - число степеней подвижности манипулятора;
n - число степеней подвижности манипулятора;  m - число движителей подводного аппарата; О - точка крепления манипулятора к подводному аппарату.
m - число движителей подводного аппарата; О - точка крепления манипулятора к подводному аппарату.
Следует отметить, что до начала работы манипулятора, установленного на подводном аппарате, в режиме его зависания над или вблизи объекта работ определяется и задается желаемая траектория движения рабочего органа манипулятора, которая должна быть точно отработана последним после вывода аппарата в заданную точку пространства. Однако при движении манипулятора происходит незапланированное угловое и линейное смещение подводного аппарата из исходного положения в пространстве даже при наличии системы его автоматической стабилизации, которая имеет ограниченную точность и инерционность. Это делает невозможным автоматическое выполнение многих технологических операций, поскольку рабочий орган манипулятора начинает двигаться с большим отклонением от желаемой траектории.
В результате возникает необходимость введения дополнительных сигналов управления соответствующими приводами соответствующих степеней подвижности манипулятора уже в процессе его движения. Эти сигналы должны обеспечить дополнительные перемещения в соответствующих степенях подвижности манипулятора и тем самым скомпенсировать незапланированное отклонение его рабочего органа от желаемой траектории, которое обусловлено незапланированным смещением подводного аппарата от его исходного положения при работе манипулятора. Указанные дополнительные сигналы формируются на основе информации о текущем угловом и линейном смещении подводного аппарата относительно его исходного положения, а также информации о непрерывно изменяющейся конфигурации манипулятора.
Заявленный способ реализуется следующим образом.
После зависания подводного аппарата в позиции 2 в некоторой точке пространства около объекта работ строится желаемая траектория 1 движения рабочего органа манипулятора для выполнения конкретной технологической операции, и блок 6 начинает формировать программные сигналы αпpi управления, поступающие на входы соответствующих следящих приводов манипулятора, построенных с помощью обратных связей 13. На выходах сумматоров 7 этих следящих приводов формируют соответствующие ошибки εi слежения, которые после коррекции в блоках 8, усиливаясь усилителями 9, поступают на входы двигателей 10, обеспечивая перемещения во всех суставах 11 манипулятора, которые измеряются датчиками 12 и обеспечивают движение рабочего органа манипулятора по желаемой траектории 1. Если бы в процессе движения манипулятора подводный аппарат оставался в исходной позиции 2, то в некоторый момент времени рабочий орган манипулятора находился бы вблизи точки А на траектории 1, а сам манипулятор занимал бы позицию 3.
Однако при движении манипулятора в вязкой среде в точке О его крепления к подводному аппарату появляются сила F и момент М, с которыми этот манипулятор действует на подводный аппарат, произвольно смещая его в момент времени t из исходной позиции 2 в некоторую другую позицию. В процессе работы манипулятора на блок 17 также поступают сигналы αпрi и он начинает формировать сигналы Uj управления движителями подводного аппарата, которые приближенно компенсируют силовое F и моментное М воздействия на подводный аппарат со стороны работающего манипулятора. В результате смещение этого аппарата относительно его исходного положения 2 становится незначительным и он занимает положение 4. Однако и в этом положении конфигурация 3 манипулятора у смещенного аппарата уже не будет обеспечивать нахождение рабочего органа манипулятора в точке А.
В результате для сохранения заданной точности перемещения рабочего органа манипулятора по траектории 1 этот манипулятор должен совершить дополнительное движение в пространстве, изменяя свою конфигурацию (см. его новое положение 5). Эти дополнительные движения обеспечиваются с помощью дополнительных сигналов управления Δαi, формируемых на выходе блока 16 и поступающих на сумматоры 7 каждой степени подвижности манипулятора. При этом на соответствующие входы блока 16 поступают сигналы Δα, Δγ, Δβ от блока 14 гироскопов и сигналы Δxc, Δγc, Δzc от навигационной системы 15.
Очевидно, что реализация предложенного способа управления подводным манипулятором в режиме зависания его подводного аппарата-носителя не вызывает принципиальных затруднений, поскольку в качестве блоков 6, 14, 16 и 17; сумматоров 7; корректирующих устройств 8; усилителей 9; двигателей 10; датчиков 12 и навигационной системы 15 используются известные типовые устройства и узлы, чьи технические и эксплуатационные характеристики соответствуют параметрам работы подводного аппарата и манипулятора.
Способ управления подводным манипулятором в режиме зависания подводного аппарата, включающий подачу на входы двигателей всех степеней подвижности манипулятора сигналов, определяемых желаемой программной траекторией движения его рабочего органа в пространстве и формируемых на основе аналитических соотношений, полученных после решения обратной задачи кинематики для конкретной кинематической схемы манипулятора, а на входы соответствующих движителей подводного аппарата - сигналов, компенсирующих силовые и моментные воздействия на этот аппарат со стороны манипулятора, произвольно перемещающегося в вязкой среде, причем сигналы управления движителями подводного аппарата формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на подводный аппарат, учитывающих все эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости, отличающийся тем, что на борту подводного аппарата устанавливают гироскопические датчики и навигационную систему, определяющие линейное и угловое смещения этого аппарата от его исходного положения при работающем манипуляторе, а на следящие приводы всех степеней подвижности манипулятора подают дополнительные сигналы управления, пропорциональные смещению этого подводного аппарата от его исходного положения, которые обеспечивают дополнительное перемещение рабочего органа манипулятора в пространстве и тем самым продолжение его точного движения по заранее заданной желаемой программной траектории независимо от произвольных смещений подводного аппарата.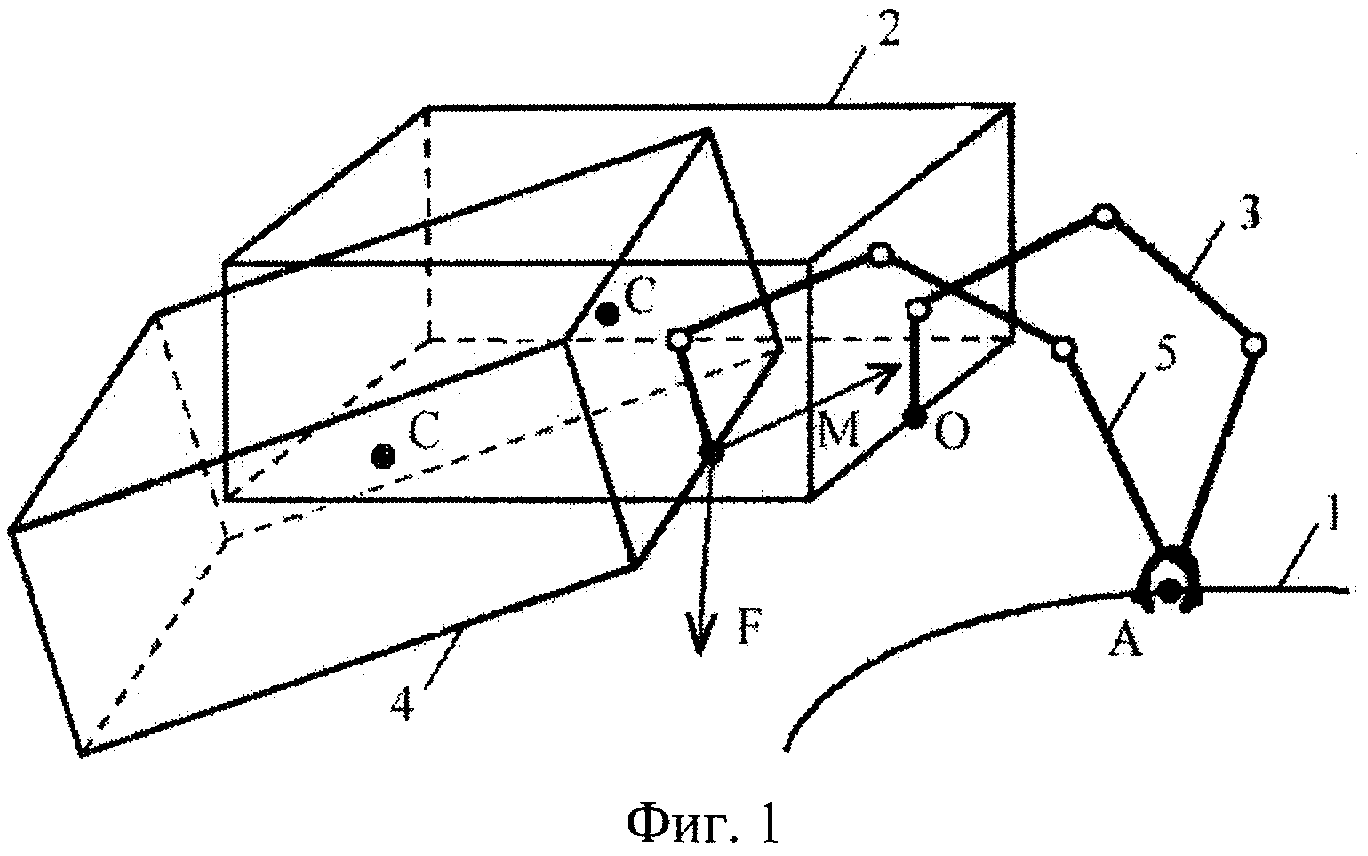
Устройство формирования программных сигналов управления
Способ управления подводным аппаратом
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипулятора
Установка для исследования образца материала на истирание льдом
Установка для исследования образца материала на истирание льдом
Установка для исследования образца материала на истирание льдом
Механизм трансформации лопасти турбины
Механизм трансформации лопасти турбины
Упорный подшипниковый узел
Самонастраивающийся электропривод
Способ подготовки пробы для газохроматографического определения пестицидов в биоматериале
Объемно-профилированная свая
Электромашина

