Результат интеллектуальной деятельности: КОМБИНИРОВАННАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к технической кибернетике и может быть использовано в системах управления априорно неопределенными нестационарными динамическими объектами в периодических режимах.
Наиболее близким техническим решением к предлагаемому является комбинированная адаптивная система управления для динамических объектов с периодическими коэффициентами (патент РФ №2441266, Официальный бюл. «Изобретения и полезные модели». - 2012, №3, - прототип), содержащая блок задания коэффициентов, первый, второй и третий блоки суммирования, параллельный фильтр-компенсатор, первый и второй умножители, блок задержки, интегратор, объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход блока суммирования подключен к входу параллельного фильтра компенсатора, выход которого подключен к обоим входам первого умножителя и второму входу второго умножителя, выход первого умножителя подключен к входу интегратора и к первому входу второго блока суммирования, второй вход второго блока суммирования соединен с выходом блока задержки, выход второго блока суммирования соединен с входом третьего блока суммирования и с входом блока задержки, второй вход третьего блока суммирования соединен с выходом интегратора, выход третьего блока суммирования соединен с первым входом второго умножителя, вход объекта управления подключен к выходу второго умножителя.
Однако недостатком данной системы является потеря работоспособности в случае присутствия в нестационарном объекте управления параметров, являющихся непериодическими функциями времени.
Технической задачей, на решение которой направлено заявленное изобретение, является расширение класса динамических объектов, в частности обеспечение диссипативной устойчивости рассматриваемой системы для неустойчивых объектов с непериодическими внешними и параметрическими возмущениями и разницей порядков числителя и знаменателя передаточной функции, превышающей единицу.
Решение поставленной задачи достигается тем, что из системы, содержащей блок задания коэффициентов, первый, второй и третий блоки суммирования, параллельный фильтр-компенсатор, первый и второй умножители, блок задержки, интегратор, объект регулирования, согласно изобретению исключается интегратор, при этом выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы которого подключены к входам первого блока суммирования, выход первого блока суммирования соединен с входом параллельного фильтра-компенсатора, первый и второй входы первого умножителя, а также второй вход второго умножителя соединены с выходом параллельного фильтра-компенсатора, выход первого умножителя подключен к первому входу второго блока суммирования и к первому входу третьего блока суммирования, выход второго блока суммирования соединен со вторым входом третьего блока суммирования и с входом блока задержки, выход которого подключен ко второму входу второго блока суммирования, к первому входу второго умножителя подключен выход третьего блока суммирования, выход второго умножителя соединен с входом объекта регулирования.
Исключение из системы интегратора позволяет построить систему, во-первых, более простой структуры в сравнении с прототипом и, во-вторых, работоспособную при наличии непериодических внешних и параметрических возмущений.
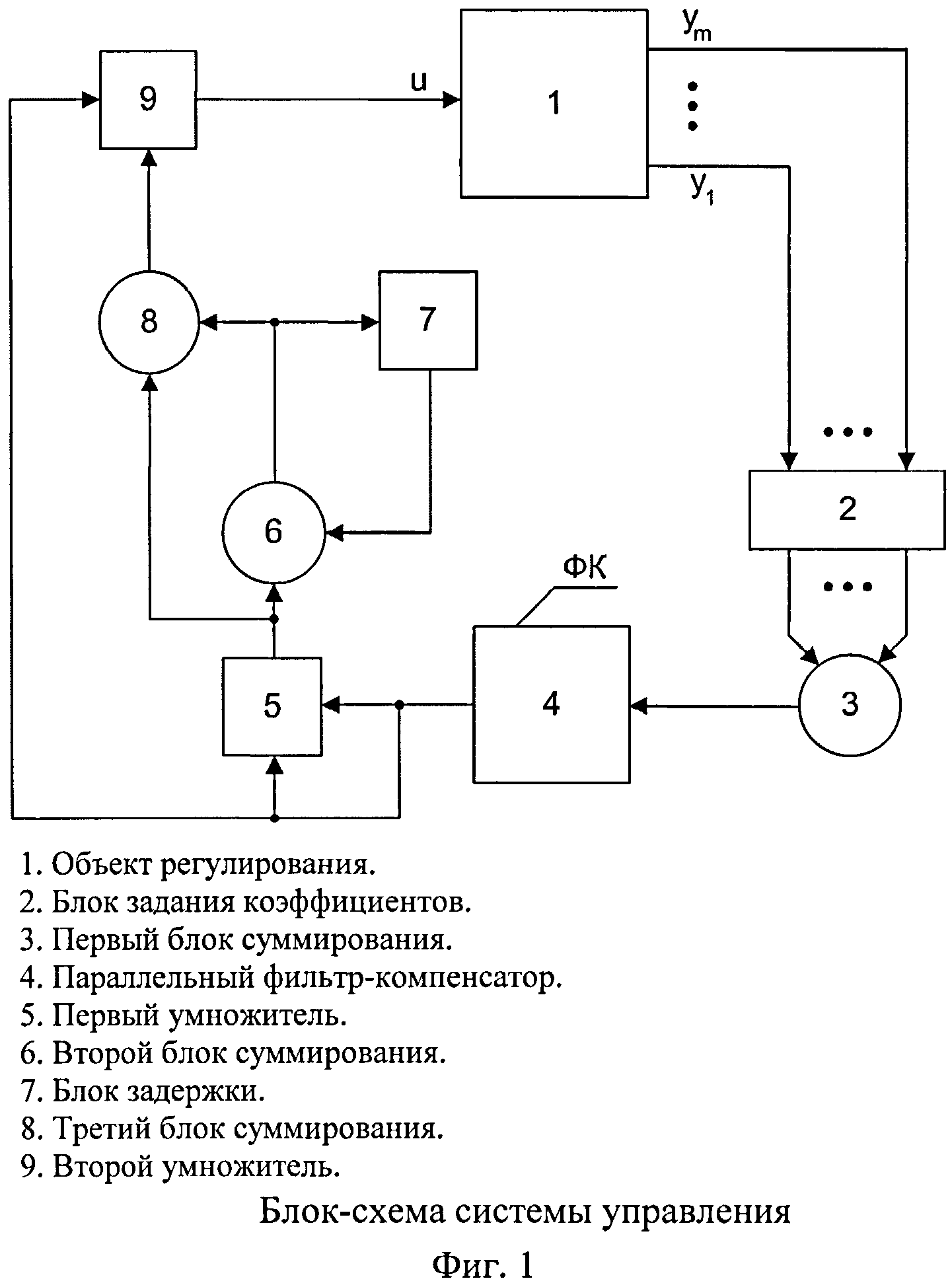
Сущность изобретения поясняется чертежами, где на фиг.1 представлена блок-схема системы управления; на фиг.2 - блок-схема параллельного фильтра-компенсатора. Система содержит: объект регулирования 1, блок задания коэффициентов 2, первый блок суммирования 3, параллельный фильтр-компенсатор 4, первый умножитель 5, второй блок суммирования 6, блок задержки 7, третий блок суммирования 8, второй умножитель 9, y1, …, ym - выходы объекта регулирования, u - скалярное управляющее воздействие.
Объект регулирования описывается уравнениями
 где x(t) - n-мерный вектор состояний объекта регулирования;
где x(t) - n-мерный вектор состояний объекта регулирования;
A(t+Т) - нестационарная матрица состояния с периодически изменяющимися параметрами;
Т - период изменения параметров матрицы состояния;
b(t) - нестационарный вектор управления;
f(t) - вектор внешних постоянно действующих возмущений, удовлетворяющий условию
 ;
;  ;
;
y(t) - m-мерный вектор выходных координат объекта регулирования;
* - символ транспонирования;
L - матрица выхода;
u(t) - скалярное управляющее воздействие;
α0 - m-мерный вектор коэффициентов блока задания коэффициентов 2, удовлетворяющий условию: полином степени n-1 α0 *α(λ) - устойчивый с положительным старшим коэффициентом, где α(λ) - числитель передаточной функции объекта регулирования.
Пользуясь критерием гиперустойчивости В.М.Попова, можно показать, что контур управления, реализуемый комбинированным способом в виде



где χпер(t) - настраиваемый коэффициент контура управления;
χроб(t) - робастная часть алгоритма (2);
γ0, γ1 - некоторые постоянные положительные величины;
обеспечивает диссипативную устойчивость системы.
Система функционирует следующим образом.
Сигналы с выходов объекта регулирования 1 поступают на соответствующие входы блока задания коэффициентов 2, внутри которого происходит умножение i-го входного сигнала на постоянный заданный коэффициент. Сигналы с выхода блока задания коэффициентов 2 идут на входы первого блока суммирования 3, где складываются. Выходной сигнал первого блока суммирования 3 поступает на вход параллельного фильтра-компенсатора 4 с функциональной схемой, соответствующей фиг.2. В каждом из блоков суммирования 10 (j=1, 2…k-1, где k - разность порядков числителя и знаменателя передаточной функции объекта регулирования 1) происходит сложение сигнала, поступающего с выхода первого блока суммирования 3 и соответствующих сигналов, полученных с выходов интеграторов 11j. Сигнал с выхода каждого блока суммирования 10j поступает на вход соответствующего интегратора 11j и на соответствующий вход блока суммирования 12. В блоке суммирования 12, формирующем выход параллельного фильтра-компенсатора 4, происходит сложение выходных сигналов каждого интегратора 11j и каждого блока суммирования 10j. Сигнал с выхода блока суммирования 12 поступает на оба входа первого умножителя 5 и на второй вход второго умножителя 9. Выходной сигнал первого умножителя 5 идет на первый вход третьего блока суммирования 8 и на первый вход второго блока суммирования 6, сигнал с выхода которого подается на вход блока задержки 7 и на второй вход третьего блока суммирования 8. Сигнал с выхода третьего блока суммирования 8 идет на первый вход второго умножителя 9, выходной сигнал которого подается на вход объекта регулирования 1.
Технический результат заключается в обеспечении диссипативной устойчивости системы управления циклического действия при непериодических внешних и параметрических возмущениях, а также разнице порядков числителя и знаменателя передаточной функции объекта регулирования, превышающей единицу.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Комбинированная робастная система управления для нестационарных динамических объектов, содержащая блок задания коэффициентов, первый, второй и третий блоки суммирования, параллельный фильтр-компенсатор, первый и второй умножители, блок задержки, объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход блока суммирования подключен к входу параллельного фильтра компенсатора, выход которого подключен к обоим входам первого умножителя и второму входу второго умножителя, отличающаяся тем, что из системы исключается интегратор, при этом выход первого умножителя подключен к первому входу второго блока суммирования и к первому входу третьего блока суммирования, выход второго блока суммирования соединен со вторым входом третьего блока суммирования и с входом блока задержки, выход которого подключен ко второму входу второго блока суммирования, к первому входу второго умножителя подключен выход третьего блока суммирования, выход второго умножителя соединен с входом объекта регулирования.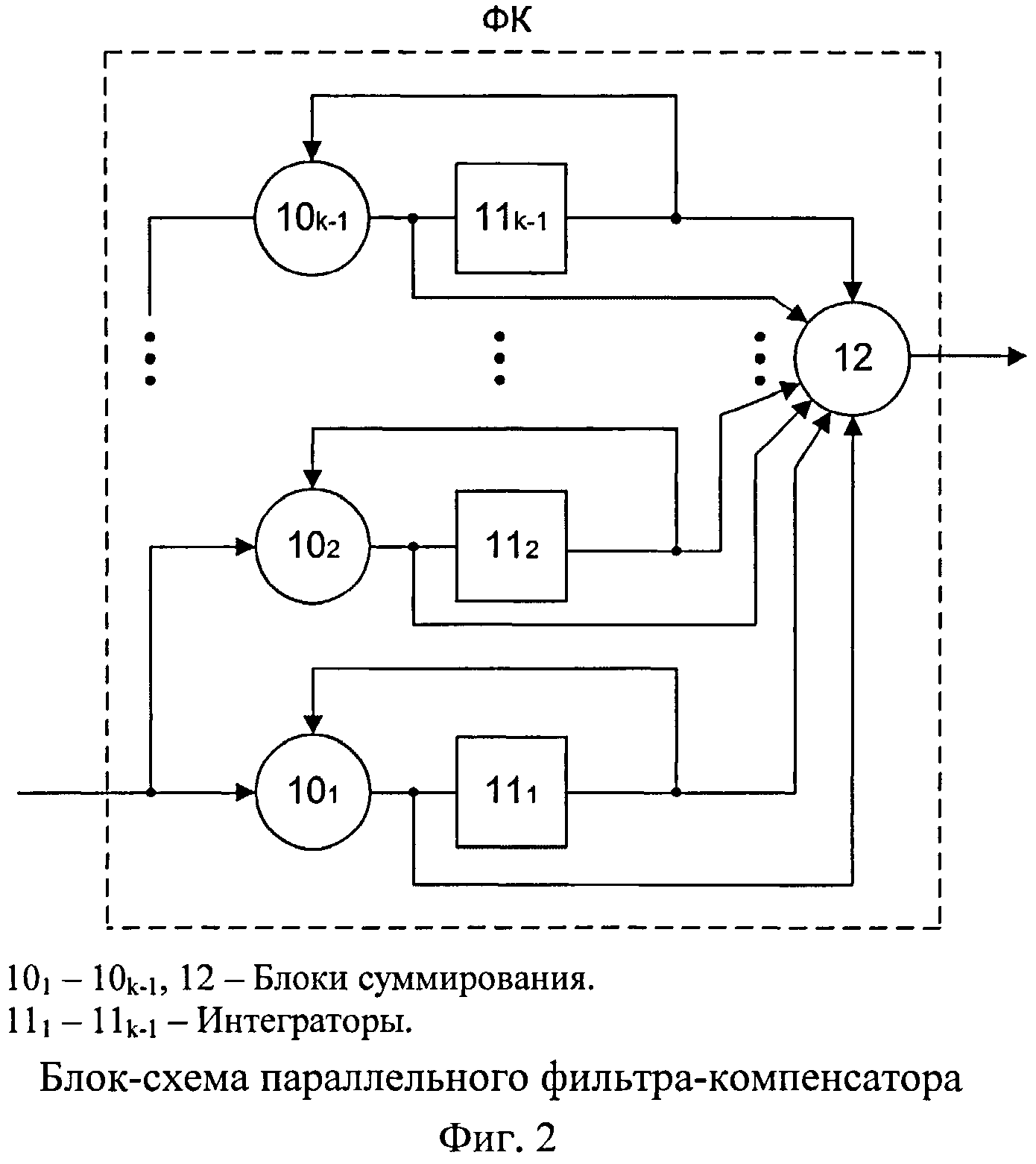
Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами
Машина для лесопользования
Способ изготовления подшипника скольжения
Способ изготовления подшипника скольжения
Стенд для моделирования воздействия продуктов взрыва на забойку взрывных скважин
Способ обработки заготовок из пластмасс
Способ обработки заготовок из пластмасс
Водоочиститель
Способ токарной обработки заготовок из капролона
Аэростатно-канатная система для воздушной заготовки и транспортировки древесины
Смеситель

