Результат интеллектуальной деятельности: МОДЕЛИРОВАНИЕ ХАРАКТЕРИСТИКИ ГАММА-ЛУЧЕВОГО КАРОТАЖНОГО ЗОНДА
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По данной заявке испрашивается приоритет предварительной заявки 61/008182 на выдачу патента США, поданной 19 декабря 2007 года, озаглавленной «GAMMA RAY TOOL RESPONSE MODELING» («МОДЕЛИРОВАНИЕ ХАРАКТЕРИСТИКИ ГАММА-ЛУЧЕВОГО КАРОТАЖНОГО ЗОНДА»).
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к характеристике гамма-лучевого каротажного зонда, а более точно, к моделированию или имитационному моделированию характеристики гамма-лучевого каротажного зонда.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Гамма-лучевые (GR) детекторы широко использовались для сбора информации во время геологической разведки, нефтегазовых буровых работ и т.д. Например, GR-детекторы в большинстве случаев используются для пассивного сбора гамма-излучения в окружающей среде, в которой расположены GR-детекторы. Различные геологические среды, такие как глинистый сланец, дают естественный источник энергии гамма-излучения, тогда как другие геологические среды, такие как песок, выдают очень незначительную энергию гамма-излучения. Соответственно, GR-полезен при получении информации касательно геологических сред и структур.
Каротажные GR-зонды, использующие вышеупомянутые GR-детекторы, как правило, применялись для создания каротажных диаграмм, полезных при анализе геологических структур, пронизанных посредством нефтегазовых буровых работ. Такие каротажные GR-зонды заключили в себе конфигурации спускаемого на тросе инструмента, которые требуют выемки бурильной колонны из ствола скважины, для того чтобы вводить в скважину каротажный зонд. В более позднее время такие каротажные GR-зонды заключили в себе конфигурации инструмента каротажа во время бурения (LWD), в которых каротажный GR-зонд заключен в бурильной колонне и предусматривает GR-детектор, размещенный на окружности сборки бурильной колонны (то есть эксцентрично от центра вращения бурильной колонны). Вышеизложенные каротажные GR-зонды содержат пассивный GR-детектор, такой как могущий быть составленным из сцинтилляционного детектора, выдающего информацию о частоте и амплитуде, соответствующую гамма-излучению, падающему на него. Соответственно, посредством сбора информации о гамма-излучении с использованием вышеупомянутых каротажных GR-зондов может быть получена информация касательно геологических структур, такая как глубина, толщина и тип пластов осадочных пород. То есть характеристики гамма-излучения, связанные с различными средами, могут анализироваться для определения характеристик разведываемой геологической формации.
Хотя каротажные GR-диаграммы, полученные с использованием вышеизложенных каротажных GR-зондов, могут выявлять осадочную структуру формаций, пронизанных стволом скважины, информация, предоставленная такими каротажными GR-зондами, не является надежной. Соответственно, в тех случаях, когда вертикальная скважина пронизывает горизонтальную структуру, каротажные GR-диаграммы могут быть относительно просты для интерпретации, такой как посредством определения измеренных глубин (MD), на которых испытываются конкретные характеристики гамма-излучения. Однако в тех случаях, когда есть крутой угол падения между стволом скважины и структурой, признак, такой как граница пласта осадочных пород, как часто испытывается в большеугловых и горизонтальных (HA/HZ) скважинах, информация, предоставляемая каротажными GR-диаграммами, становится очень затруднительной для анализа. Более того, эксцентричность, связанная с GR-детектором, располагаемым на окружности бурильной штанги, дополнительно делает неясным надлежащий анализ информации каротажной GR-диаграммы, выдаваемой инструментами LWD. Например, было обнаружено, что одиночная граница пласта осадочных пород, пронизанная стволом скважины под крутым углом падения (например, 80°), с использованием каротажного GR-зонда LWD дает амплитудную характеристику GR-детектора с двумя пиками. Такая характеристика, без дополнительной информации, проявляется, чтобы представлять более чем одну границу пласта осадочных пород, ни одна из которых не оказывается находящейся на реальной измеренной глубине реальной пронизанной границы пласта осадочных пород. Так как скважины HA/HZ и другие ситуации, где испытываются крутые углы падения, становятся более распространенными, полезность каротажных GR-диаграмм продолжает возрастать.
Были сделаны усилия для обеспечения моделирования или имитационного моделирования характеристики каротажного GR-зонда, для того чтобы лучше интерпретировать каротажные GR-диаграммы. Например, машинная программа, предусматривающая имитационное моделирование Монте-Карло для N частиц (MCNP), разработанная Лос-Аламосской национальной лабораторией, использовалась для имитационного моделирования характеристики каротажного GR-зонда. К сожалению, такое имитационное моделирование MCNP требует существенных вычислительной мощности и времени. Например, имитационное моделирование характеристики каротажного GR-зонда для относительно простой формации часто отнимает сутки компьютерного времени на многопроцессорном суперкомпьютере. Более того, ядерный физик или другой человек с очень высокой квалификацией требуется для надлежащей реализации имитационного моделирования MCNP. Соответственно, такое имитационное моделирование было непомерным по затратам и времени для широкораспространенного использования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание систем и способов, которые обеспечивают моделирование или имитационное моделирование характеристики каротажного GR-зонда с использованием гибридного аналитического и численного метода для обеспечения достаточно точных результатов имитационного моделирования с использованием относительно небольших вычислительной мощности и/или времени. Имитационное моделирование каротажного GR-зонда, предусмотренное согласно вариантам осуществления изобретения, предлагает (3D) моделирование трехмерной характеристики каротажного GR-зонда.
Варианты осуществления изобретения применяют технологию имитационного моделирования каротажного GR-зонда, которая предоставляет информацию о гамма-излучении, сымитированную в качестве функции исключительно гамма-частиц, которые достигали бы детектора без рассеяния (то есть прямого распространения из источника гамма-излучения в детектор каротажного GR-зонда). Вышеизложенное оказывает влияние на возможность для непосредственного сравнения имитационного моделирования с каротажными GR-диаграммами, выведенными на месте. Соответственно, варианты осуществления изобретения действуют, чтобы масштабировать результаты имитационного моделирования в единицы Американского нефтяного института (API), или нормированные к виду объема глинистого сланца (Vsh). Такие масштабированные результаты имитационного моделирования выдают сымитированные результаты каротажной GR-диаграммы, которая может непосредственно сравниваться с каротажными GR-диаграммами, выведенными на месте. Благодаря такому сравнению может быть определено, что присутствует достаточная корреляция, чтобы указать, что геологическая структура имитационного моделирования представляет геологическую структуру, присутствующую в скважине, где были собраны каротажные GR-диаграммы, выведенные на месте.
При предоставлении технологии имитационного моделирования каротажного GR-зонда, в которой принимаются во внимание исключительно гамма-частицы, которые достигали бы детектора без рассеяния, варианты осуществления настоящего изобретения предполагают равномерно распределенный в пространстве источник гамма-излучения. Источник гамма-излучения в таком случае может быть дискретизирован в качестве множества единичных объемных источников. Соответственно, варианты осуществления изобретения используют функцию дискретизации для определения гамма-частиц, которые достигали бы точечного детектора из каждого единичного объемного источника без рассеяния. Однако, так как многие GR-детекторы, реализованные типичными каротажными GR-зондами, не являются точечными детекторами (например, объемными детекторами), варианты осуществления настоящего изобретения дополнительно используют вышеизложенную функцию дискретизации по отношению к множеству точечных детекторов, при этом конкретное количество и конфигурация точечных детекторов выбираются, чтобы относительно точно имитационно моделировать результаты конкретной конфигурации GR-детектора. Например, варианты осуществления настоящего изобретения используют конфигурацию линейного многоточечного детектора при имитационном моделировании объемного GR-детектора.
Как следует из вышеизложенного, моделирование характеристики каротажного GR-зонда, предусмотренное согласно вариантам осуществления изобретения, содействует практичному и относительно быстрому имитационному моделированию, такому как могущее быть использованным в качестве вспомогательного средства при интерпретации каротажной GR-диаграммы. Экспериментирование показало, что имитационное моделирование каротажного GR-зонда, предусмотренное согласно вариантам осуществления настоящего изобретения, может выполняться с вычислительными быстродействиями, в более 1000 раз быстрейших, чем связанные с основанными на MCNP технологиями имитационного моделирования. Таким образом, варианты осуществления могут быть реализованы с использованием недорогих и широкодоступных вычислительных платформ, таких как персональные компьютеры, тем самым содействуя экономичному и практичному имитационному моделированию каротажного GR-зонда.
Например, в одном из общих аспектов способ включает в себя представление области исследования с использованием множества дискретных объемов источника излучения, область исследования содержит по меньшей мере один слой геологической структуры; и моделирование характеристики гамма-лучевого (GR) каротажного зонда посредством определения количества частиц гамма-излучения, испускаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые падали бы на точечный GR-детектор без рассеяния в тракте распространения между испускающим одним из объемов источника излучения и точечным GR-детектором, частицы гамма-излучения, падающие на точечный GR-детектор без рассеяния, являются частицами гамма-излучения нулевого рассеяния.
Реализации этого аспекта могут включать в себя один или более из следующих признаков. Например, каждый из множества дискретных объемов источника излучения может быть одинаковым объемом. Множество дискретных объемов источника излучения может включать в себе меньшие объемы поблизости от участков возле GR-детектора и большие объемы на наружной границе области исследования. Множество дискретных объемов источника излучения может включать в себя экспоненциально меняющуюся сетку объемов источника излучения. Множество дискретных объемов источника излучения может быть расположено в по меньшей мере одной плоскости, запараллеливающей граничную плоскость по меньшей мере одного слоя геологической структуры. Моделирование характеристики каротажного GR-зонда может включать в себя представление GR-детектора каротажного GR-зонда в качестве множества точечных GR-детекторов, точечный GR-детектор является одним из множества точечных GR-детекторов. Множество точечных GR-детекторов могут быть скомпонованы, чтобы быть на эксцентрике по отношению к центру ствола скважины. Моделирование характеристики каротажного GR-зонда может включать в себя определение количества частиц гамма-излучения нулевого рассеяния, испускаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые падали бы на каждый точечный GR-детектор из множества точечных GR-детекторов. GR-детектор может включать в себя линейный детектор, а множество точечных GR-детекторов может включать в себя множество точечных детекторов, скомпонованных, чтобы быть равноотстоящими вдоль линии по длине линейного детектора.
GR-детектор может включать в себя объемный детектор, а множество точечных GR-детекторов может включать в себя множество точечных детекторов, скомпонованных, чтобы быть равноотстоящими вдоль линии по длине объемного детектора. Множество точечных GR-детекторов может включать в себя одиночную линию точечных детекторов. Определение количества частиц гамма-излучения, которые падали бы на точечный GR-детектор без рассеяния, может включать в себя применение функции дискретизации по отношению к множеству дискретных объемов источника излучения и точечному GR-детектору.
Согласно еще одному общему аспекту способ включает в себя представление участка геологического исследования в качестве множества объемов источника излучения, участок геологического исследования содержит по меньшей мере один слой геологической структуры; представление GR-детектора каротажного GR-зонда в качестве множества точечных GR-детекторов; и определение количества частиц гамма-излучения, излучаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые падали бы на каждый точечный GR-детектор из множества точечных GR-детекторов.
Реализации этого аспекта могут включать в себя один или более из следующих признаков. Например, каждый из множества дискретных объемов источника излучения может быть объемом одинакового размера. Множество дискретных объемов источника излучения может включать в себя объемы разного размера. Множество объемов источника излучения может быть расположено в по меньшей мере одной плоскости, запараллеливающей граничную плоскость по меньшей мере одного слоя геологической структуры. Определение количества частиц гамма-излучения может включать в себя количество исключительно частиц гамма-излучения нулевого рассеяния, испускаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые падали бы на каждый точечный GR-детектор из множества точечных GR-детекторов. GR-детектор может включать в себя линейный детектор, а множество точечных GR-детекторов содержит множество точечных детекторов, скомпонованных, чтобы быть равноотстоящими вдоль линии по длине линейного детектора. GR-детектор может включать в себя объемный детектор, а множество точечных GR-детекторов содержит множество точечных детекторов, скомпонованных, чтобы быть равноотстоящими вдоль одиночной линии по длине объемного детектора.
Согласно еще одному общему аспекту способ включает в себя определение количества частиц гамма-излучения, которые падали бы на точечный гамма-лучевой (GR) детектор без рассеяния в тракте распространения гамма-излучения, частицы гамма-излучения, падающие на точечный GR-детектор без рассеяния, являются частицами гамма-излучения нулевого рассеяния; и моделирование характеристики каротажного GR-зонда для множества азимутальных углов ствола скважины с использованием количеств частиц гамма-излучения.
Реализации этого аспекта могут включать в себя один или более из следующих признаков. Например, область исследования может быть представлена с использованием множества дискретных объемов источника излучения, область исследования включает в себя по меньшей мере один слой геологической структуры, при этом определение количеств может включать в себя определение количеств частиц гамма-излучения, испускаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые падали бы на точечный GR-детектор без рассеяния в тракте распространения между испускающим одним из объемов источника излучения и точечным GR-детектором.
Компьютерный программный продукт, содержащий компьютерный исполняемый код, хранимый на машиночитаемом носителе, компьютерный программный продукт может включать в себя машиноисполняемый код для представления области исследования в качестве множества объемов источника излучения; и машиноисполняемый код для моделирования характеристики каротажного гамма-лучевого (GR) зонда посредством определения количества частиц гамма-излучения, испускаемых каждым объемом источника излучения из множества объемов источника излучения, которые падали бы на точечный GR-детектор без рассеяния в тракте распространения между испускающим одним из объемов источника излучения и точечным GR-детектором.
Реализации этого аспекта могут включать в себя один или более из следующих признаков. Например, компьютерный программный продукт может включать в себя машиноисполняемый код для представления GR-детектора каротажного GR-зонда в качестве множества точечных GR-детекторов, точечный GR-детектор является одним из множества точечных GR-детекторов.
Согласно еще одному общему аспекту система включает в себя один или более аппаратных и/или программных компонентов, сконфигурированных для представления участка геологического исследования в качестве множества дискретных объемов источника излучения; для представления GR-детектора каротажного GR-зонда в качестве множества точечных GR-детекторов; для определения количества частиц гамма-излучения, испускаемых каждым объемом источника излучения из множества дискретных объемов источника излучения, которые ударяли бы в каждый точечный GR-детектор из множества точечных GR-детекторов; и/или для моделирования характеристики каротажного GR-зонда с использованием количества частиц гамма-излучения, связанных с каждым точечным GR-детектором из множества точечных GR-детекторов. Система также может включать в себя изложенный каротажный GR-зонд.
Реализации одного или более из вышеупомянутых аспектов могут включать в себя один или более из следующих признаков. Например, любой один из вышеупомянутых способов может включать в себя позиционирование каротажного GR-зонда внутри ствола скважины в пределах подземной формации. На основании смоделированной характеристики каротажного GR-зонда могут определяться структурные характеристики геологической формации в пределах подземной формации. Определенные структурные характеристики геологической формации могут анализироваться для определения, например создания, плана добычи углеводородов. Углеводороды могут добываться из подземной формации на основании плана добычи углеводородов.
Вышеизложенное обрисовало, скорее в общих чертах, признаки и технические преимущества настоящего изобретения, для того чтобы могло быть лучше понято подробное описание изобретения, которое следует. В дальнейшем будут описаны дополнительные признаки и преимущества изобретения, которые образуют предмет формулы изобретения у изобретения. Специалистами в данной области техники должно быть принято во внимание, что раскрытые концепция и отдельный вариант осуществления могут без труда использоваться в качестве основы для модификации или проектирования других конструкций для выполнения идентичных целей настоящего изобретения. Специалистами в данной области техники также должно пониматься, что такие эквивалентные конструкции не выходят из сущности и объема изобретения, которые изложены в прилагаемой формуле изобретения. Новейшие признаки, которые предполагаются характеристиками изобретения как в отношении своей организации, так и способа работы, вместе с дополнительными целями и преимуществами будут лучше понятны из последующего описания, когда рассматриваются в связи с прилагаемыми фигурами. Однако должно быть отчетливо понятно, что каждая из фигур приведена исключительно с целью иллюстрации и описания и не подразумевается в качестве определения границ настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего изобретения далее будет приведена ссылка на последующее описание со ссылками на прилагаемые чертежи, на которых:
фиг. 1 показывает примерную скважину, имеющую каротажный GR-зонд, расположенный в ней, который может моделироваться согласно вариантам осуществления изобретения;
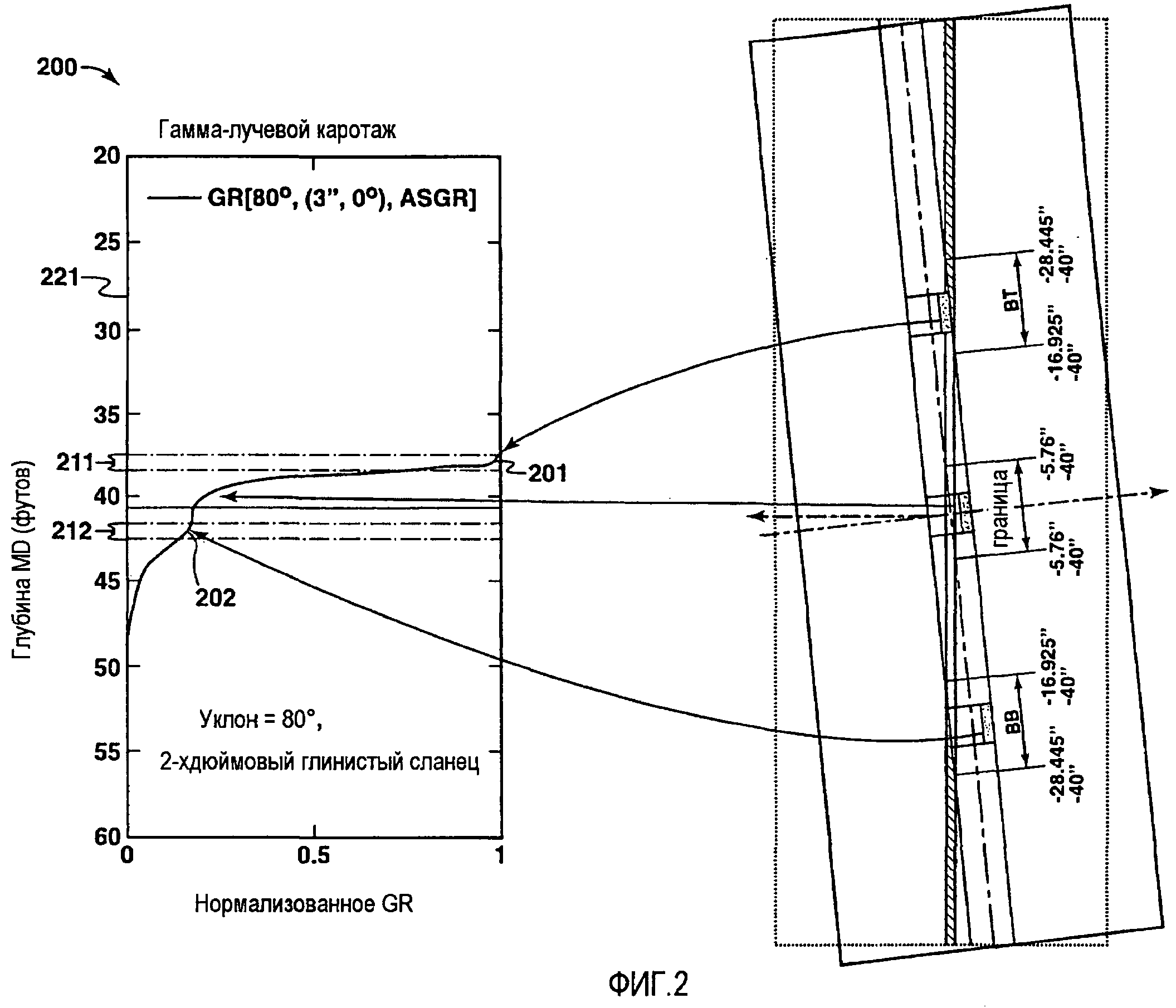
фиг. 2 показывает каротажную GR-диаграмму, предоставляющую характеристику каротажного GR-зонда из скважины по фиг. 1;
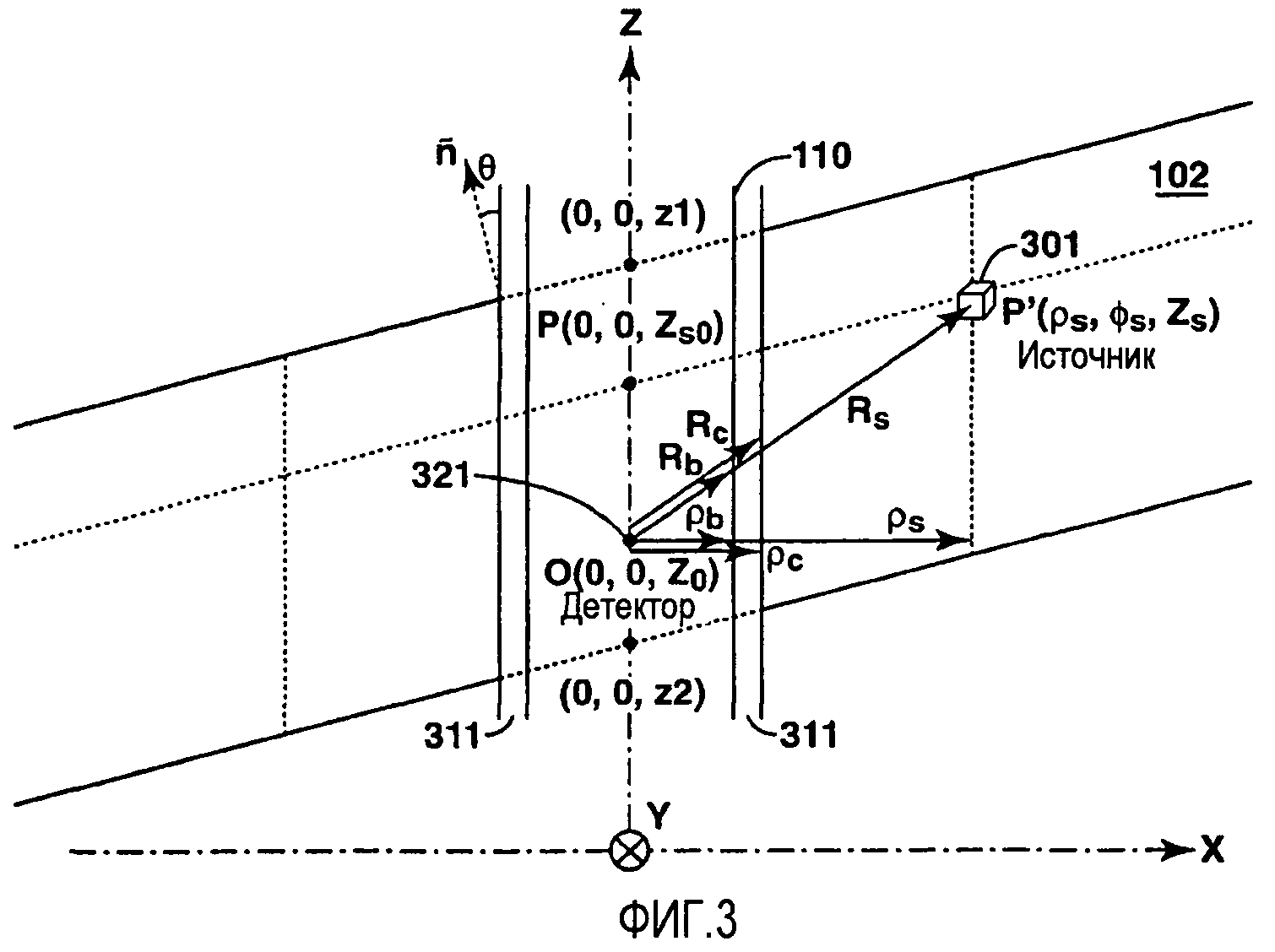
фиг. 3 показывает геометрическое взаимное расположение точечного GR-детектора и единичного объемного источника;
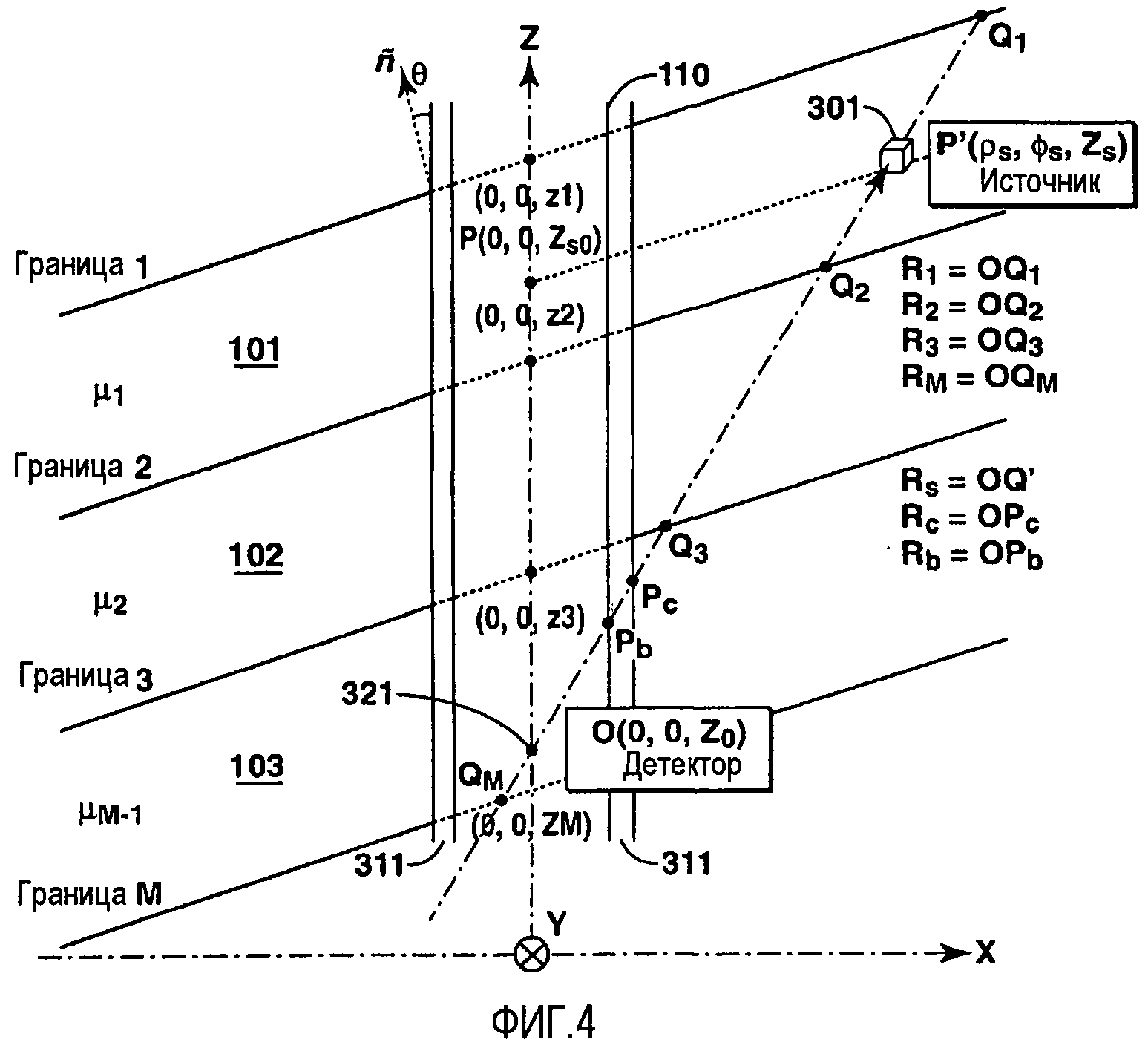
фиг. 4 показывает геометрическое взаимное расположение точечного GR-детектора и единичного объемного источника в многослойной формации;
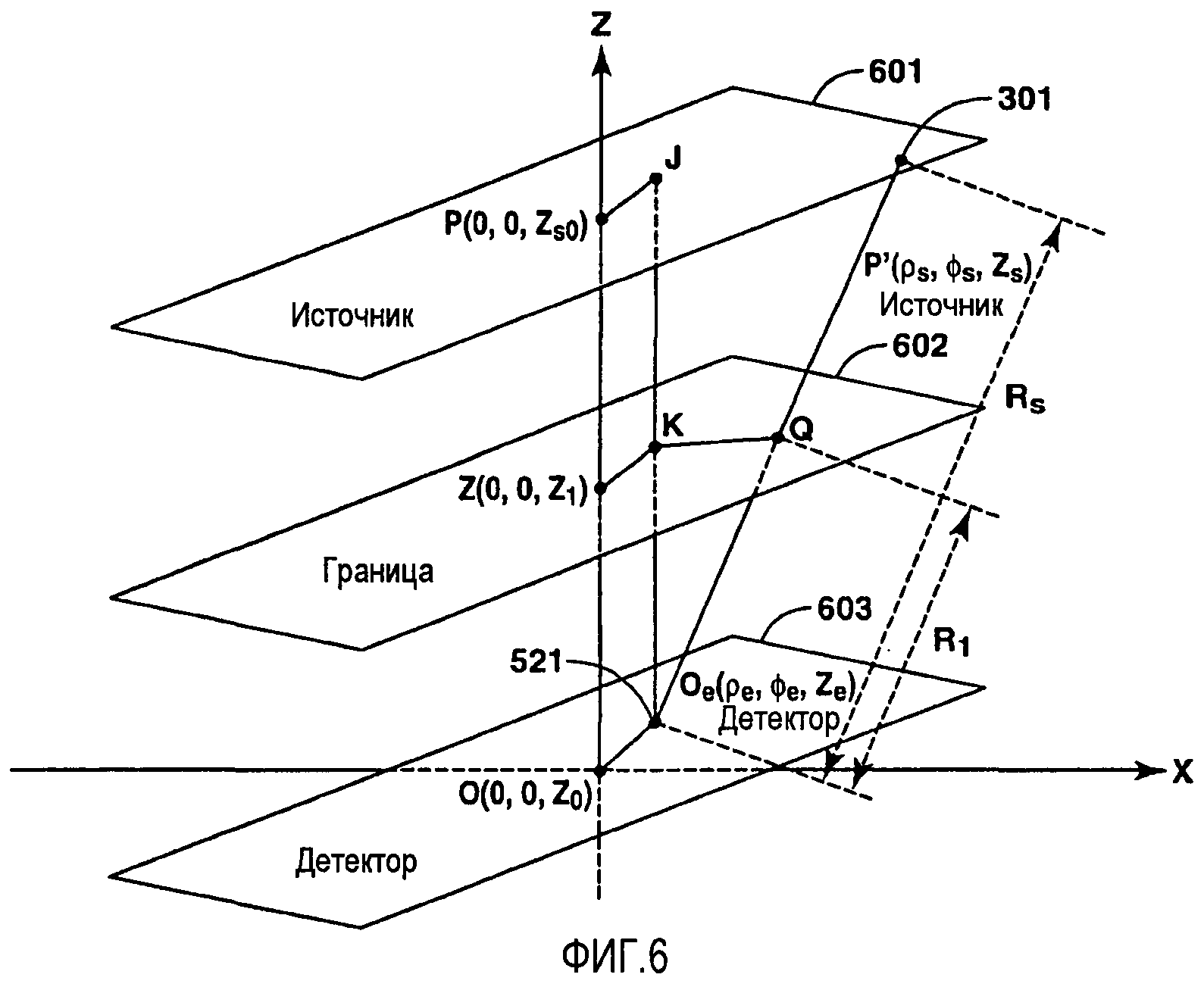
фиг. 5 и 6 показывают геометрическое взаимное расположение точечного GR-детектора, расположенного на эксцентрике по отношению к стволу скважины, и единичного объемного источника;
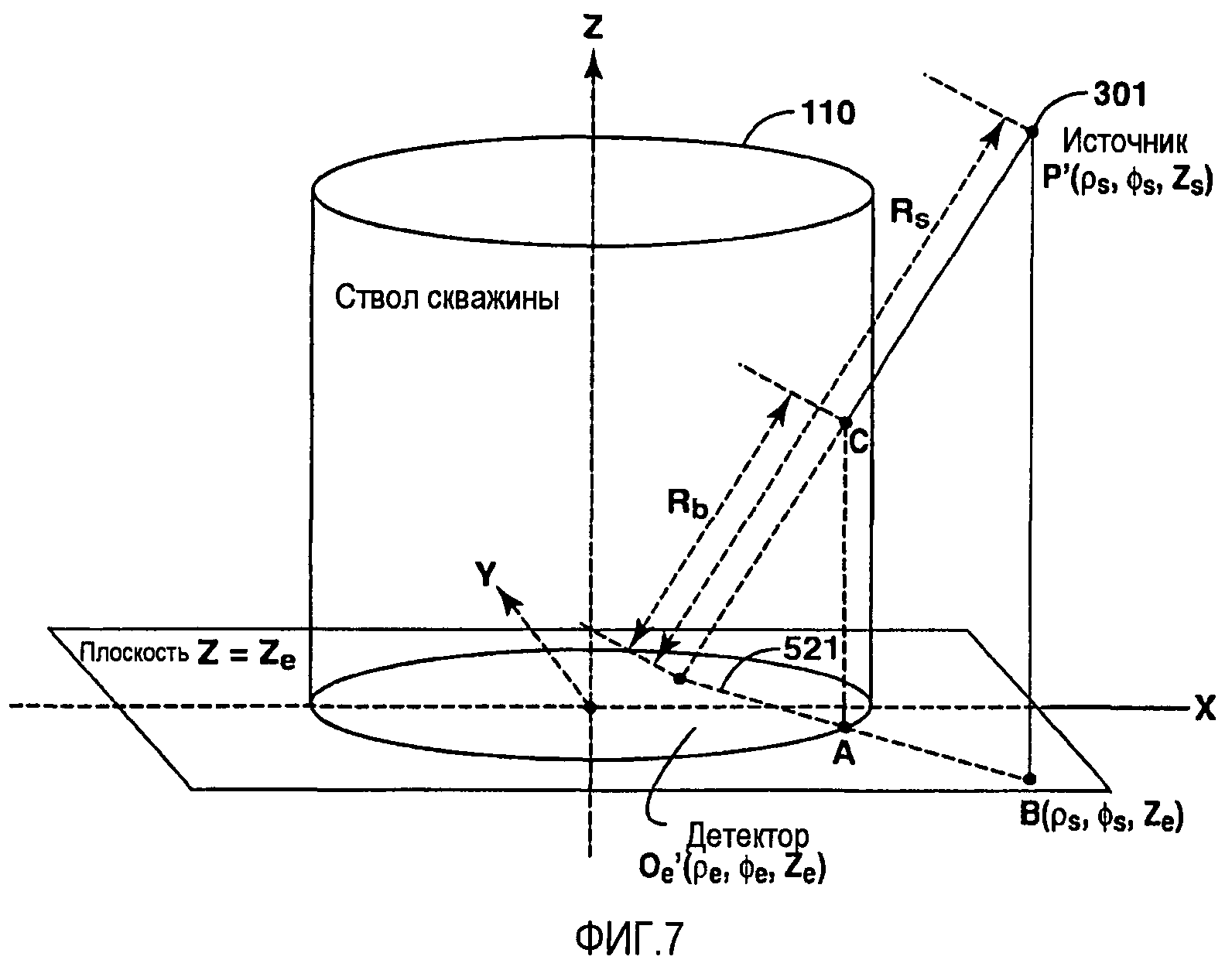
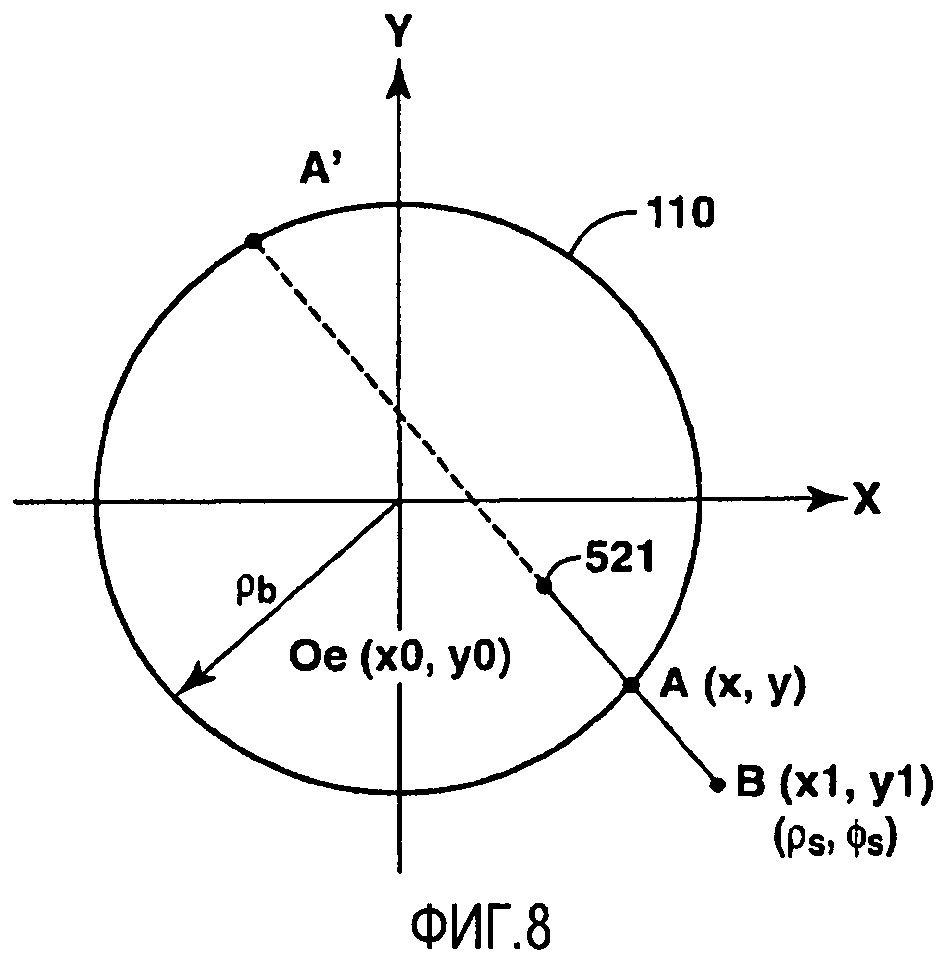
фиг. 7 и 8 показывают геометрическое взаимное расположение ствола скважины по отношению к GR-детектору и единичному объемному источнику по фиг. 5 и 6;
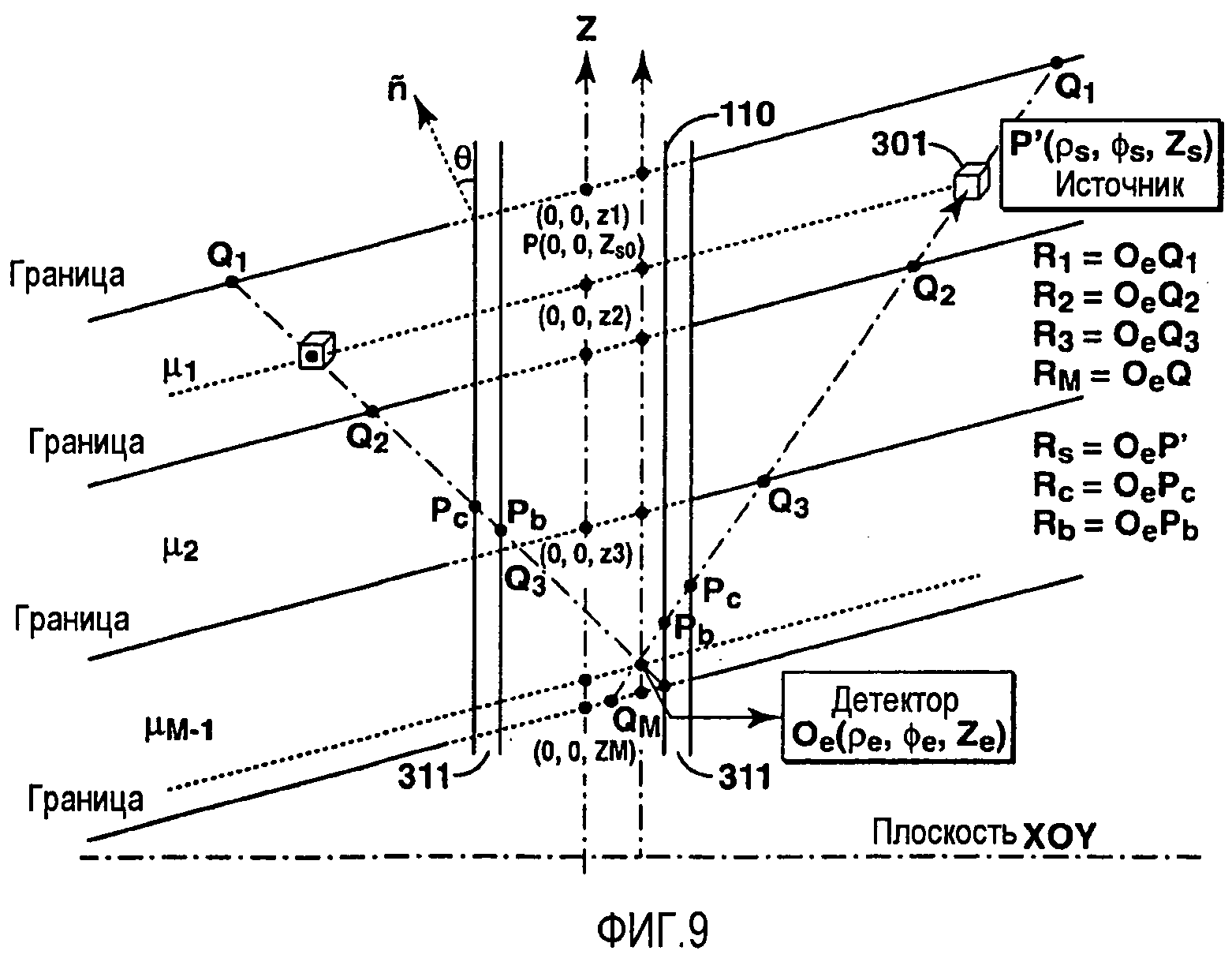
фиг. 9 показывает геометрическое взаимное расположение точечного GR-детектора, расположенного на эксцентрике по отношению к стволу скважины, и единичного объемного источника в многослойной формации;
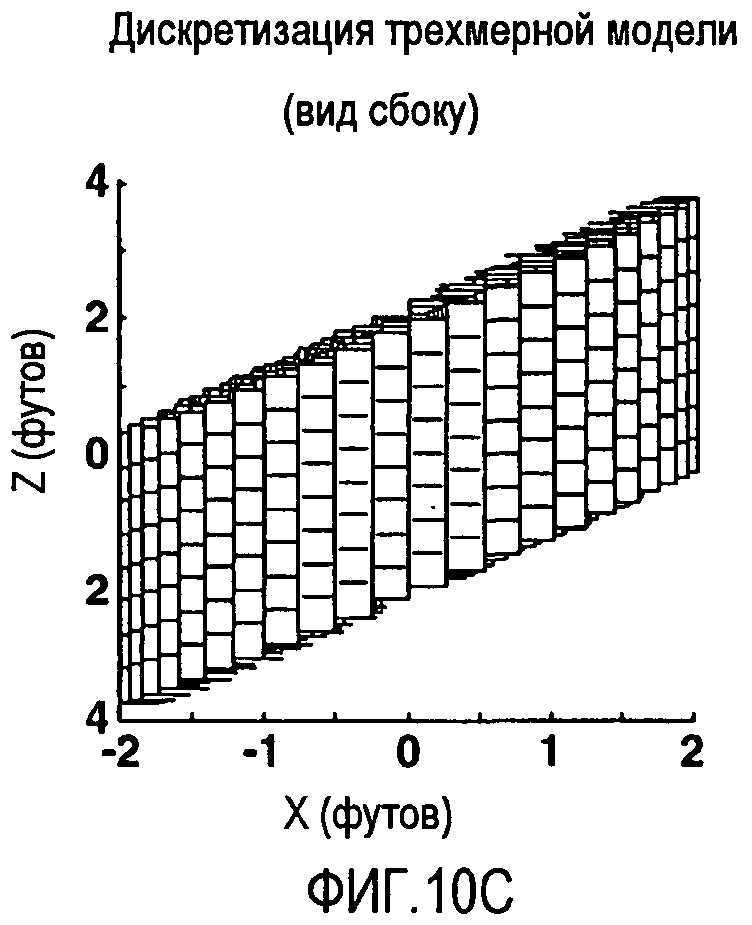
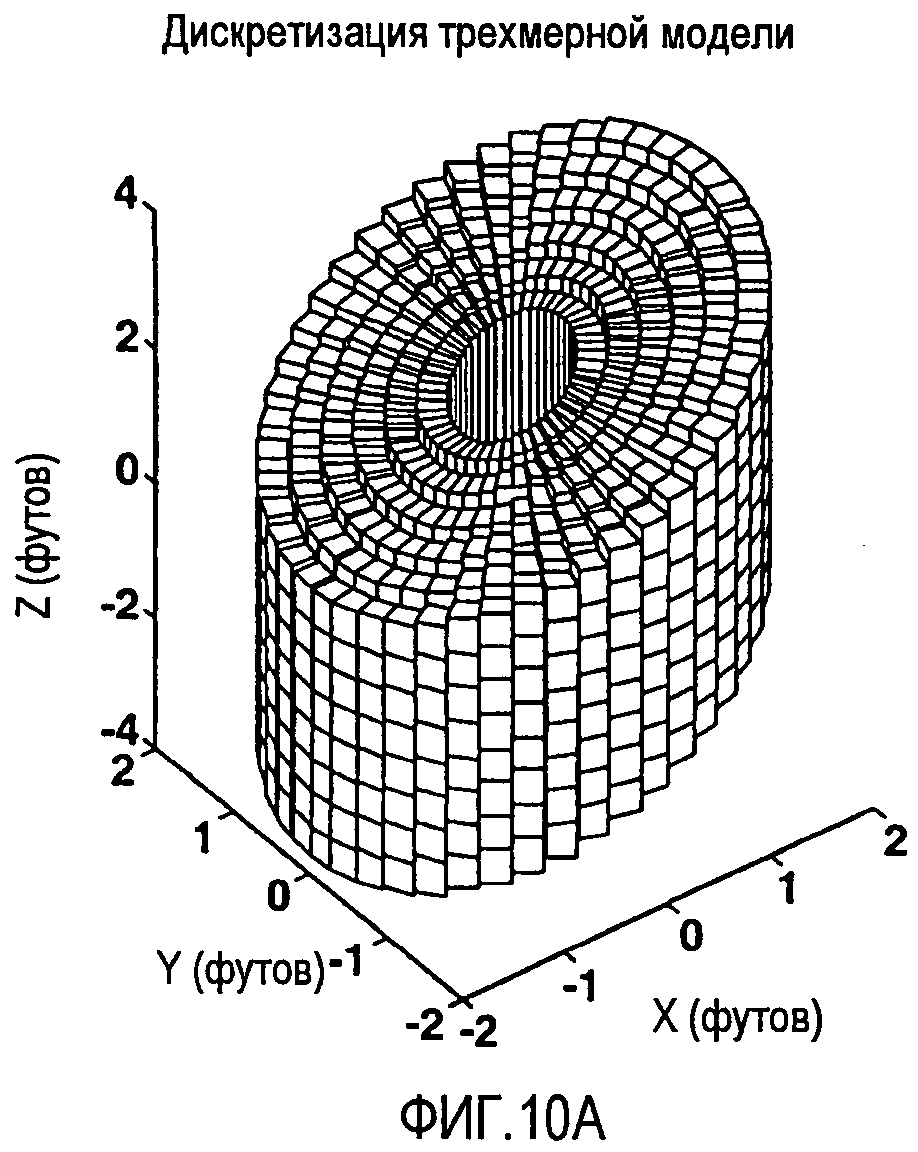
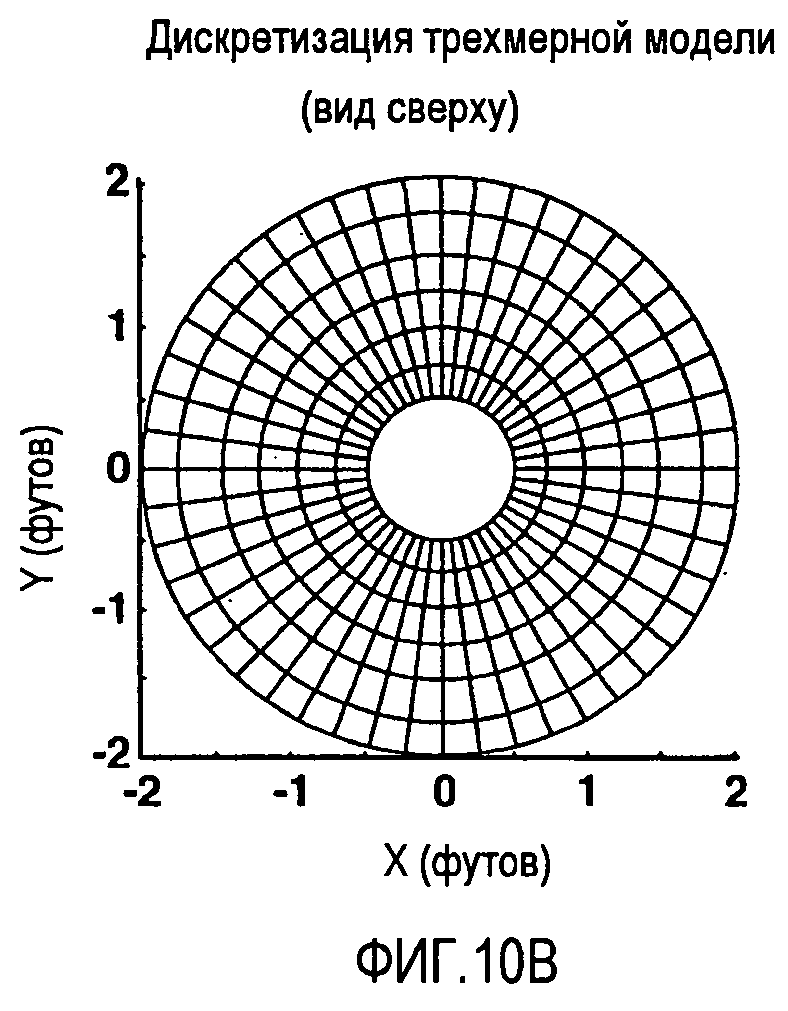
фиг. 10A-10C показывают дискретизированное представление, использующее множество единичных объемных источников, области исследования;
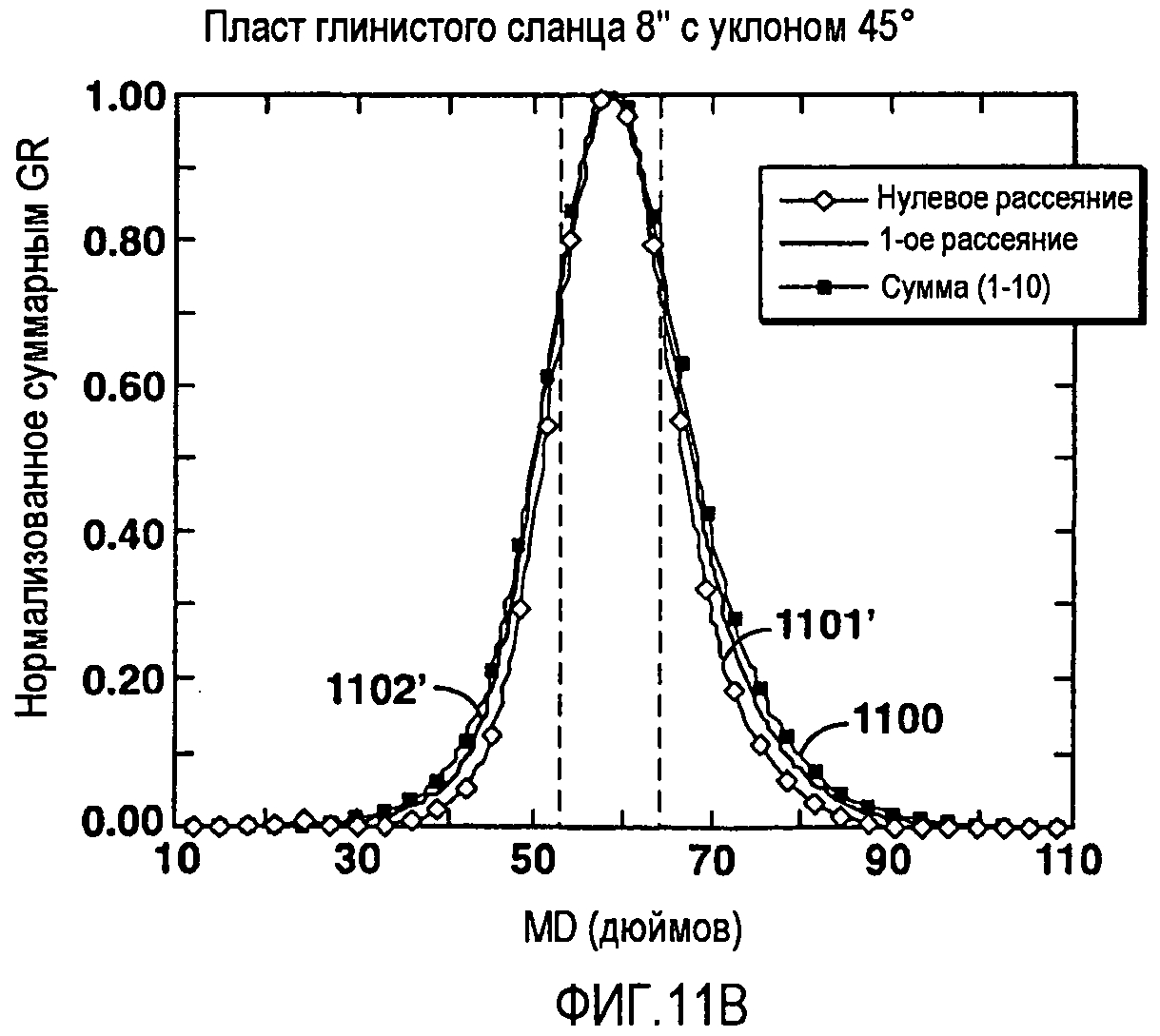
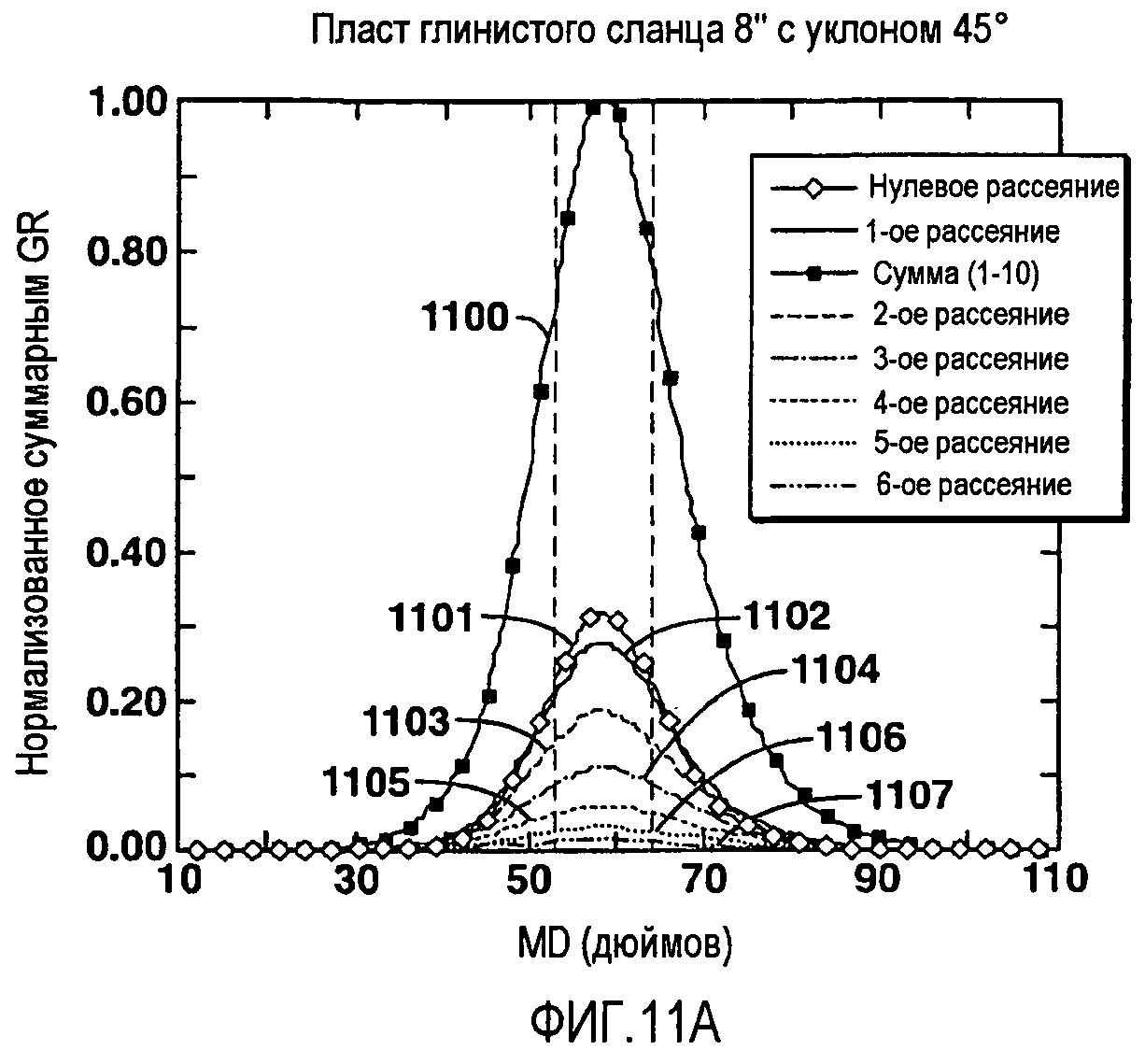
фиг. 11A и 11B показывают характеристику GR-детектора для гамма-лучей, встречающихся с различными величинами рассеяния, в том числе нулевым рассеянием;
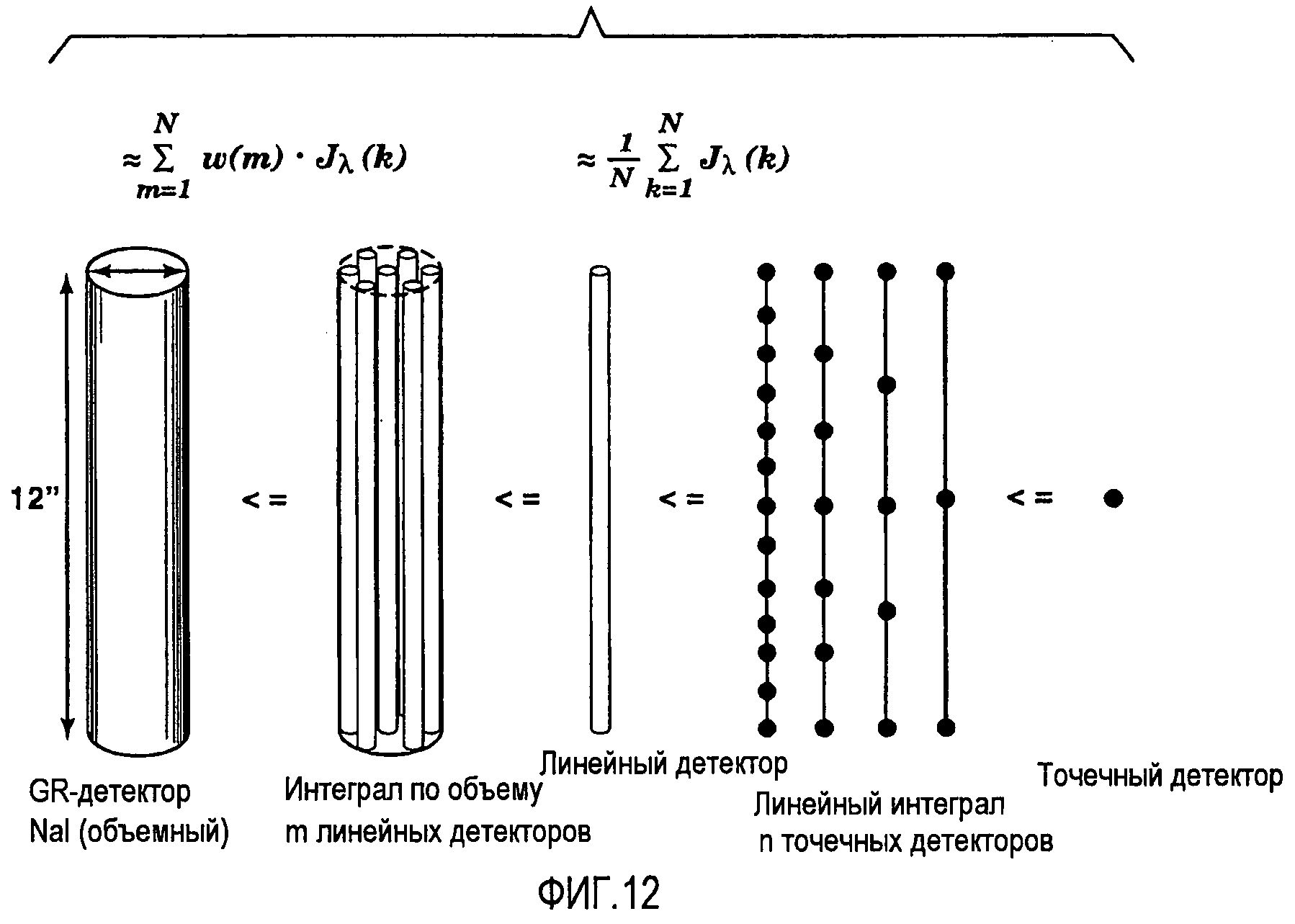
фиг. 12 показывает моделирование характеристики линейного детектора посредством суммирования характеристики множества точечных детекторов и моделирование объемного детектора посредством суммирования характеристики множества линейных детекторов;
фиг. 13A и 13B показывают множество линейных детекторов, расположенных в объеме, для моделирования объемного детектора; и
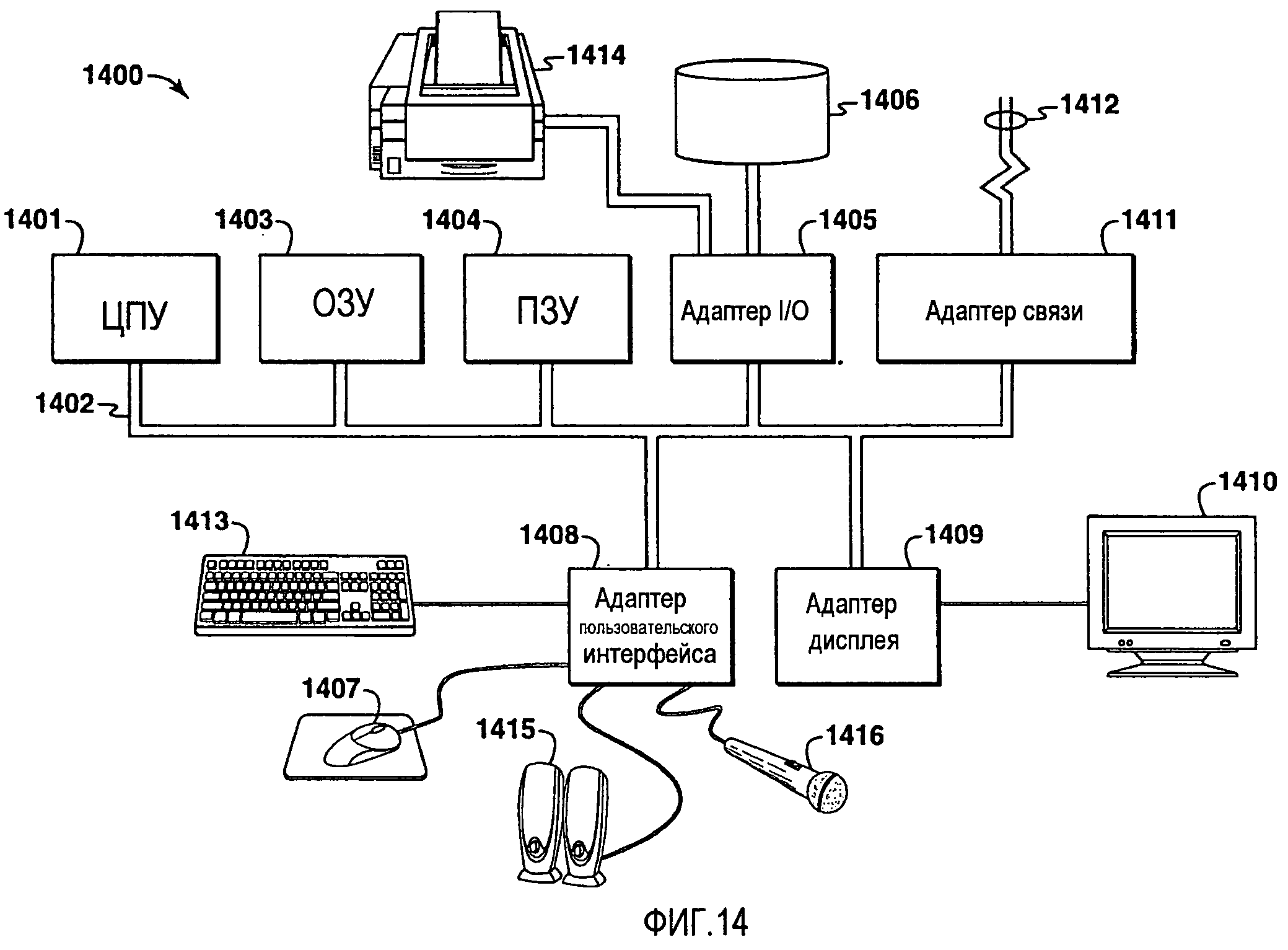
фиг. 14 показывает компьютерную систему для моделирования согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Изобретение будет описано в связи с его предпочтительными вариантами осуществления. Однако в тех пределах, в которых последующее подробное описание специфично конкретному варианту осуществления или конкретному использованию изобретения, это подразумевается всего лишь иллюстративным и не должно интерпретироваться в качестве ограничивающего объем изобретения. В противоположность, оно предназначено для покрытия всех альтернативных вариантов, модификаций и эквивалентов, которые могут быть включены в пределы сущности и объема изобретения, которые определены прилагаемой формулой изобретения.
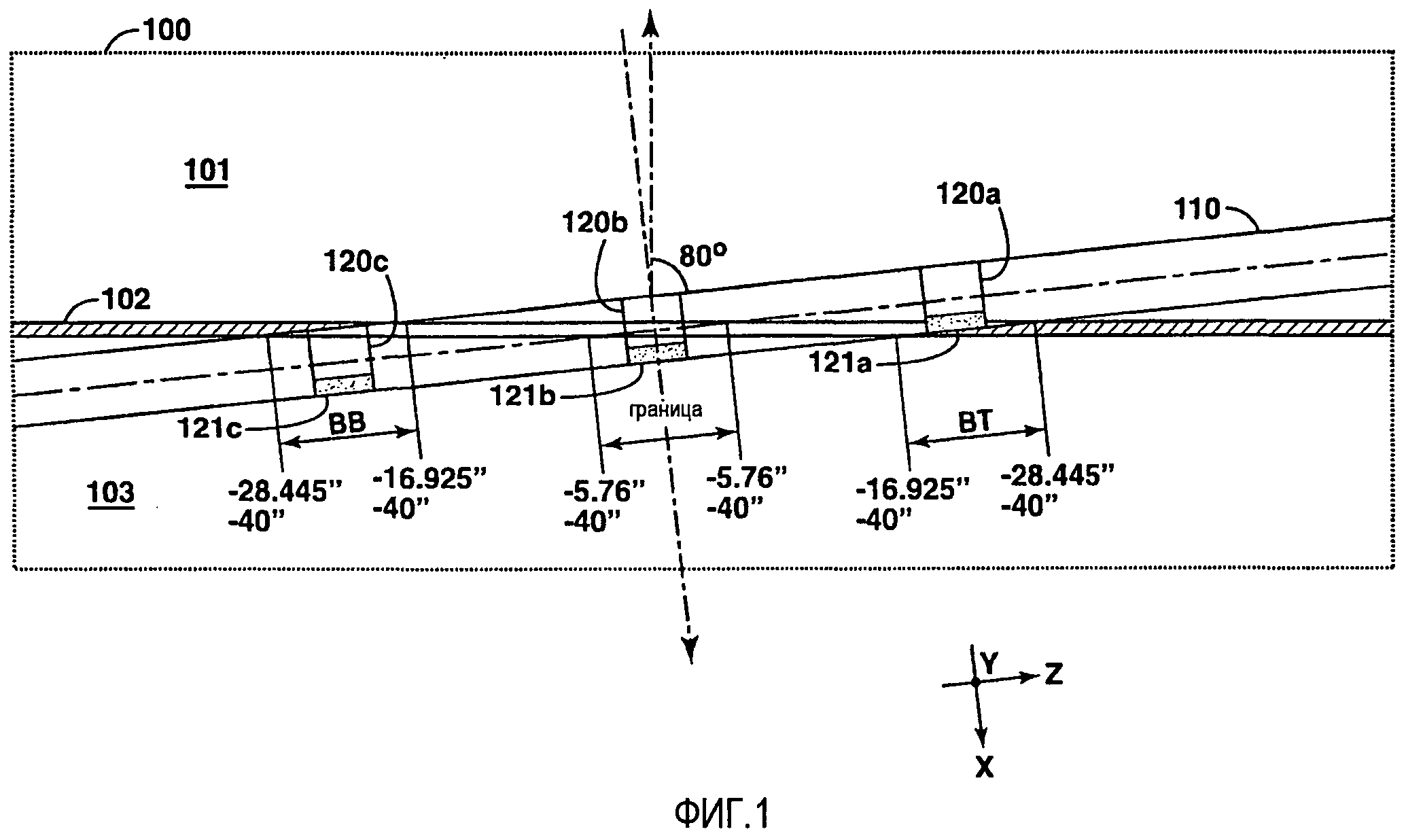
На фиг. 1 проиллюстрирована примерная скважина, в которой ствол скважины пронизывает структуру формации под крутым углом падения. Более точно, геологическая структура 100, которая включает в себя слой 102 глинистого сланца (например, слой глинистого сланца толщиной в 2 дюйма), окруженный другими геологическими средами (например, песком, почвой и т.д.) слоев 101 и 103, пронизанными стволом 110 скважины (например, стволом скважины диаметром в 8 дюймов). В проиллюстрированном варианте осуществления ствол 110 скважины содержит конфигурацию большеугловой или горизонтальной (HA/HZ) скважины, при этом слой 102 глинистого сланца пронизывается под углом падения в 80°.
Гамма-лучевой (GR) каротажный зонд 120 (показанный в качестве каротажного GR-зонда 120a-120c, который расположен на различных позициях по фиг. 1), имеющий GR-детектор 121, расположенный в нем, введен в ствол 110 скважины для сбора гамма-излучения, испускаемого средами формации 100. Например, каротажный GR-зонд 120 может содержать конфигурацию инструмента каротажа во время бурения (LWD), в которой каротажный GR-зонд 120 содержит часть бурильной колонны (не показана), используемой для создания ствола 110 скважины. Независимо от того, содержит ли каротажный GR-зонд 120 конфигурацию LWD, или спускаемую на тросе конфигурацию, каротажный GR-зонд 120 перемещается вниз по стволу 110 скважины, с тем чтобы собирать информацию о гамма-излучении на различных измеряемых глубинах. Каротажный GR-зонд 120a-120c, а соответственно, GR-детектор 121a-121c, представляет каротажный GR-зонд 120, расположенный на разных измеряемых глубинах. В режиме LWD каротажный GR-зонд 120 вращался бы внутри ствола 110 скважины, тем самым обеспечивая обзор в 360° стенки ствола скважины для GR-детектора 121, расположенного на окружности каротажного GR-зонда 120.
Хотя геологическая структура 100 проиллюстрированного варианта осуществления дает относительно простую структуру, каротажные GR-диаграммы, выведенные с использованием каротажного GR-зонда 120, вероятно, должны быть затруднительны для анализа, по меньшей мере частично, вследствие крутого угла падения между стволом 110 скважины и слоем 102 глинистого сланца. Как может быть видно на фиг. 1, ствол 110 скважины пронизывает слой 102 глинистого сланца на участке, обозначенном «BT» (верхней частью границы), и выходит из слоя 102 глинистого сланца на участке, обозначенном «BB» (нижней частью границы). Однако средняя точка слоя 102 глинистого сланца, попадающая на участок, обозначенный «граница», типично была бы желательной для идентификации ради анализа геологической структуры. На фиг. 2 может быть видно, что каротажная GR-диаграмма 200, выведенная с использованием каротажного GR-зонда 120, имеет пики, связанные с проникновением ствола скважины в слой глинистого сланца (пик 201, соответствующий участку BT) и выходом ствола скважины из слоя глинистого сланца (пик 202, соответствующий участку BB). Типичный анализ каротажной GR-диаграммы 200 может приводить к выводу, что слой глинистого сланца расположен на участке 211 (например, измеряемой глубине приблизительно в 38 футов) и другой слой глинистого сланца расположен на участке 212 (например, измеряемой глубине приблизительно в 42 фута), когда в действительности есть только один слой глинистого сланца, расположенный на участке 221 (например, измеряемой глубине приблизительно в 40 футов).
Как может приниматься во внимание из вышеизложенного, имитационное моделирование или моделирование характеристики каротажного GR-зонда по отношению к различным геологическим структурам является крайне дорогостоящим при анализе и осмыслении каротажных GR-диаграмм. Хотя машинная программа, предусматривающая имитационное моделирование Монте-Карло для N частиц (MCNP), разработанная Лос-Аламосской национальной лабораторией, использовалась для точного имитационного моделирования характеристики каротажного GR-зонда, такое имитационное моделирование MCNP требует существенных вычислительной мощности и времени. Соответственно, варианты осуществления настоящего изобретения предлагают моделирование или имитационное моделирование характеристики каротажного GR-зонда с использованием гибридного аналитического и численного метода для предоставления достаточно точных результатов имитационного моделирования с использованием относительно небольшой вычислительной мощности и/или времени.
Варианты осуществления изобретения применяют технологию имитационного моделирования каротажного GR-зонда, которая предоставляет информацию о гамма-излучении, сымитированную в качестве функции исключительно гамма-частиц, которые достигали бы детектора без рассеяния (то есть прямого распространения из источника гамма-излучения в детектор каротажного GR-зонда). Варианты осуществления изобретения действуют, чтобы масштабировать результаты имитационного моделирования в единицы Американского нефтяного института (API), или нормированные к виду объема глинистого сланца (Vsh), для облегчения сравнения смоделированных или сымитированных результатов с реальной информацией каротажного GR-зонда.
При предоставлении аналитического выражения для характеристики каротажного GR-зонда согласно вариантам осуществления изобретения интенсивность гамма-излучения, dJ, детектированная на точечном детекторе из источника единичного объема dv на расстоянии R, может быть представлена в качестве:
 .
.
При этом предполагается, что абсорбционным затуханием гамма-излучения является μ вдоль направления излучения, объем dv источника испускает n r dv частиц гамма-излучения в секунду и частицы гамма-излучения достигают детектора без рассеяния (то есть с нулевым рассеянием).
С использованием уравнения (1), приведенного выше, если предполагается, что источник гамма-излучения равномерно распределен в пространстве, интенсивность гамма-излучения на точечном детекторе может быть выражена в качестве объемного интеграла по полному пространству объема исследования, как изложено ниже:
 .
.
При выводе аналитического выражения для характеристики каротажного GR-зонда сначала будет рассмотрен случай наклонной скважины, проходящей через однослойную формацию (например, как представлено слоем 102 глинистого сланца по фиг. 1). Использованием обоих, цилиндрических и декартовых, координат при анализе ось Z расположена в центре ствола скважины и плоскости ρ-ϕ и X-Y перпендикулярны стволу скважины. Предполагается, что углом наклона скважины (или относительным падением формации) является θ, и, таким образом, плоскость, параллельная формации (например, параллельная границе пласта осадочных пород), имеет такой же угол θ относительно плоскостей ρ-ϕ и X-Y. Дополнительно предполагается, что вся формация является источником, за исключением ствола скважины и обсадной трубы, и что источник ограничен интегралом от плоскостей, параллельных формации. Плоскость, параллельная формации, может быть выражена в качестве:

 .
.
С использованием уравнений (1)-(4), приведенных выше, Z s (точка, в которой плоскость, включающая в себя источник и которая параллельная формации, пересекает ось Z) может быть найдена в качестве:

Из вышеприведенного полный объем источника, который может выдавать энергию гамма-излучения, падающую на GR-детектор (то есть объем в пределах области исследования), может быть выражен как:

где ρ b - радиус ствола скважины, ρ c - радиус обсадной трубы, ρ s_max - максимальный радиус источника, воздействующего на GR-детектор, z1 - верхний конец источника по оси Z, а z2 - нижний конец источника по оси Z.
На фиг. 3 показано геометрическое взаимное расположение точечного детектора и единичного объемного источника. Более точно, точечный детектор 321 проиллюстрированного варианта осуществления расположен в точке O (0, 0, Z0), которая находится в центре ствола 110 скважины, а единичные объемные источники (показан источник 301) расположены в точках P' (ρ s ,φ s ,Z s) в пределах слоя 102 глинистого сланца. Должно быть принято во внимание, что в вариант осуществления, проиллюстрированный на фиг. 3, была включена обсадная труба 311, облицовывающая ствол 110 скважины.
Из вышеизложенного интенсивность гамма-излучения, принимаемая точечным детектором 321 в точке O из источника с единичным объемом dv в любой произвольной точке P', может быть выражена в качестве:
 .
.
С использованием геометрических взаимных расположений, проиллюстрированных на фиг. 3, может быть принято во внимание, что:
 .
.
Таким образом:
 .
.
Объединением уравнений (7) и (9) математическое выражение для гамма-излучения из формации может быть представлено как:
 .
.
Беря часть источника, которая представлена в уравнениях (6) и (10), интеграл по полному пространству для трехмерной характеристики (3D) точечного GR-детектора может быть выражен в качестве:
 .
.
Посредством выполнения интегрирования для всех единичных объемных источников в пределах области исследования с использованием цилиндрических координат интенсивность гамма-излучения на точечном детекторе может быть представлена как:
 ,
,
где:
 ,
,
тогда:

 .
.
Из вышеприведенного аналитическое выражение для трехмерной характеристики центрированного точечного GR-детектора в наклонном стволе скважины или формации с уклоном может быть выражено как:
 (18).
(18).
На фиг. 4 показано геометрическое взаимное расположение точечного детектора 321 и источника 301 в многослойной формации. Подобно случаю однослойной формации, как изложено в уравнении (7), приведенном выше, интенсивность гамма-излучения, принимаемая точечным детектором 321, расположенным в точке O, из источника 301, имеющего единичный объем dv, расположенного в любой произвольной точке P' в многослойной формации, может быть выражена в качестве:
 ,
,
где:



и где R m - расстояние от детектора до точки Q m, которая является пересечением границы M и тракта гамма-излучения. Как может быть видно на фиг. 4, геометрические взаимные расположения по отношению к R b /ρ b , R c /ρ c и R s /ρ s остаются прежними в случае многослойной формации. Таким образом, объединение уравнений (7) и (20) дает математическое выражение для гамма-излучения из многослойной формации. Аналитическое выражение для трехмерной характеристики центрированного точечного GR-детектора в наклонном стволе скважины или формации с уклоном в многослойной формации, таким образом, может быть выведено с использованием уравнения (19), как показано для случая однослойной формации.
Вышеизложенные примерные случаи предположили, что GR-детектор (как представленный точечным детектором 321) расположен в центре ствола скважины, например, в случае конфигурации спускаемого на тросе каротажного GR-зонда. Однако некоторые конфигурации каротажного GR-зонда не располагают GR-детектор в центре ствола скважины. Например, конфигурации каротажного GR-зонда LWD располагают GR-детектор на окружности инструмента, тем самым размещая GR-детектор на эксцентрике по отношению к центру ствола скважины. Такие конфигурации каротажного зонда дополнительно усложняют моделирование характеристики каротажного GR-зонда. Соответственно, варианты осуществления изобретения приспособлены для моделирования таких конфигураций каротажного GR-зонда.
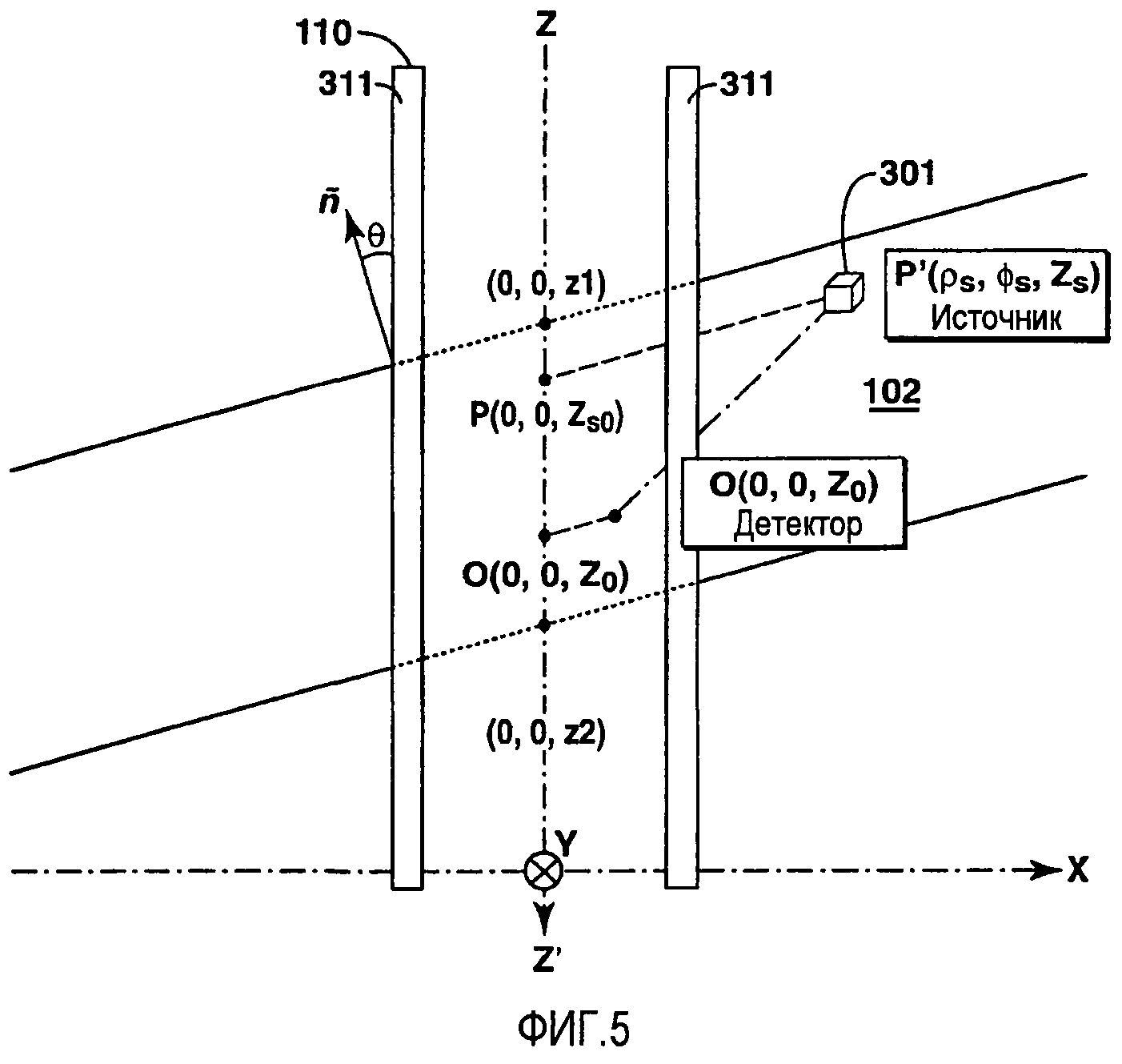
На фиг. 5 показано геометрическое взаимное расположение единичного объемного источника и точечного детектора, расположенного на эксцентрике по отношению к центру ствола скважины. Более точно, точечный детектор 521 проиллюстрированного варианта осуществления расположен в точке O e (ρ e ,φ e ,Z e), которая находится ближе к стенке ствола 110 скважины, а единичные объемные источники (показан источник 301) расположены в точках P' (ρ s ,φ s ,Z s) в пределах слоя 102 глинистого сланца. По сравнению со случаями центрированного детектора, показанными выше, в примерах, проиллюстрированных на фиг. 5, есть разность в расстоянии тракта гамма-излучения внутри разных носителей, в том числе расстояниях внутри ствола R b скважины, расстоянии внутри обсадной трубы R c и расстояний внутри слоев.
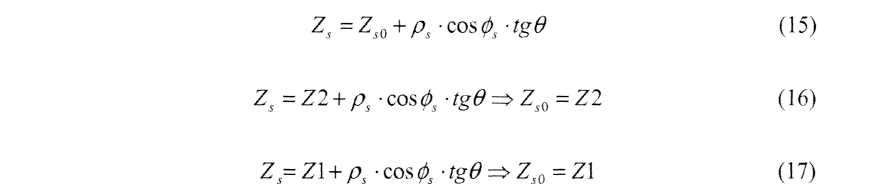
Далее, на фиг. 6 видно, что источник 301, в точке P' (ρ s ,ϕ s ,Z s), находится на плоскости 601, которая параллельна плоскости 602 границы пласта осадочных пород. Плоскость 601 пересекает ось Z в точке P (0,0,Z S0). Плоскость границы пласта осадочных пород, плоскость 602, пересекает ось Z в точке Z (0,0,Z S1). Детектор 603, в точке O e (ρ e ,φ e ,Z e), находится на плоскости 603, такая плоскость также параллельна плоскости 602 границы пласта осадочных пород. Плоскость 603 пересекает ось Z в точке O (0,0,Z 0). Из точки O e детектора может быть проведена линия, параллельная оси Z, и эта линия будет пересекать плоскость 603 (плоскость границы пласта осадочных пород) в точке K, а плоскость 601 (плоскость источника) в точке J. Там, где расстояния от детектора 521 до границ слоя определены в качестве с R 1 по R m, следующее отношение может быть выведено из геометрических взаимных расположений, показанных на фиг. 6:
 .
.
Подобным образом, Z s0 (точка, в которой плоскость 601 пересекает ось Z) и Z0 (точка, в которой плоскость 603 пересекает ось Z) может быть найдена в качестве:
 .
.
Зная точку P' (ρ s ,ϕ s ,Z s) источника, точку O e (ρ e,ϕ e,Z e) детектора и точку z (0,0,Z 1) границы, R 1 (расстояние вдоль тракта гамма-излучения от точки детектора до граничной плоскости) может быть найдено с использованием уравнений (23)-(25), приведенных выше.
На фиг. 7 геометрическое взаимное расположение тракта гамма-излучения от точки источника, P' (ρ s ,ϕ s,Z s), до точки детектора, O e (ρ e ,ϕ e,Z e), показано по отношению к стволу 110 скважины. На фиг. 7 линия P'B является линией, перпендикулярной плоскости Z=Z e, которая пересекает точку источника, а точка B (ρ s ,ϕ s,Z e) является точкой пересечения линии P'B и плоскости Z=Z e . Точка C является пересечением тракта гамма-излучения из точки источника в точку детектора (линии P'O e) со стволом 110 скважины. Точка A является пересечением с плоскостью Z=Z e линии, параллельной линии P'B, которая проходит через точку C. Последующее может быть выведено из геометрических взаимных расположений, показанных на фиг. 7.
 .
.
Из вышеизложенного может быть принято во внимание, что, если определены O e A и O e B, R b также определен.
Когда геометрия на фиг. 7 проецируется вниз на плоскость XOY, результатом является геометрия по фиг. 8. Как показано на фиг. 8, положения O e и B уже определены и задан радиус ствола 110 скважины, ρ b. Положение A может быть выведено из последующих линейной функции и функции окружности:

 ,
,
где:
 .
.
С совместным решением уравнений (27) и (28) результатом являются два возможных решения для A (A и A', как показано на фиг. 8). Следующее уравнение может использоваться для оценки, какое из решений следует выбрать для положения A(x,y) и, таким образом, получить O e A:
 .
.
С использованием уравнений (26)-(30) может быть найдено расстояние, R b, вдоль тракта гамма-излучения от точки O e до стенки ствола скважины.
Должно быть принято во внимание, что расстояние, R c, вдоль тракта гамма-излучения от точки O e до наружной поверхности обсадной трубы может быть найдено с использованием вышеизложенных геометрических принципов. Соответственно, конфигурации скважины, включающие в себя обсадную трубу, глинистую корку или другие среды, облицовывающие ствол скважины, могут быть без труда приспособлены к концепциям настоящего изобретения.
На фиг. 9 показано геометрическое взаимное расположение эксцентрически расположенного точечного детектора 521 и источника 301 в многослойной формации. Подобно отношению, определенному в уравнении (23), приведенном выше, для однослойной формации, набор отношений для многослойной формации, показанной на фиг. 9, может быть определен как:


 .
.
Подобно зависимости по уравнению (26), следующие отношения могут быть определены для случая многослойной формации:

 .
.
Подобно случаям центрированного детектора, изложенным выше в уравнении (7), следующие формулы интенсивности гамма-излучения могут быть выведены с использованием геометрических взаимных расположений по фиг. 9:

 .
.
Должно быть принято во внимание, что уравнения (36) и (37) учитывают эксцентриситет точечного детектора 521. То есть в зависимости от положения точечного детектора 521 внутри ствола 110 скважины, являющегося следствием вращения детектора 521 вокруг оси Z, будет надлежащим уравнение (36) интенсивности гамма-излучения «короткого расстояния» или уравнение (37) интенсивности гамма-излучения «длинного расстояния». Надлежащее уравнение может выбираться, как обсуждено выше со ссылкой на уравнение (30).
Должно быть принято во внимание, что использование уравнений (36) и (37) содействует моделированию каротажного GR-зонда, которое включает в себя азимутальный анализ. Соответственно, характеристика GR-детектора может отмечаться в трехмерном пространстве, чтобы включать в себя азимут вдоль ствола скважины. Такая информация может быть особенно полезной при определении угла падения пласта осадочных пород, толщины пласта осадочных пород и т.д.
Из вышеприведенного аналитическое выражение для трехмерной характеристики эксцентрически расположенного точечного GR-детектора в наклонном стволе скважины или формации с уклоном в многослойной формации может быть получено в качестве:
 .
.
При предоставлении эффективной по вычислениям технологии имитационного моделирования каротажного GR-зонда варианты осуществления настоящего изобретения дискретизируют источник гамма-излучения в качестве вышеизложенных единичных объемных источников. Соответственно, варианты осуществления изобретения используют функцию дискретизации для определения гамма-частиц, которые достигали бы точечного детектора из каждого такого точечного источника без рассеяния.
На фиг. 10A-10C показана дискретизированная трехмерная модель ствола 110 скважины и область исследования слоя 102 глинистого сланца. Более точно, на фиг. 10A показано изометрическое представление дискретизированной модели, в которой множество единичных объемных источников, таких как источник 301, обсужденный выше, используются для моделирования области исследования слоя 102 глинистого сланца. Фиг. 10B и 10C показывают вид сверху и вертикальный вид сбоку соответственно дискретизированной модели по фиг. 10A, при этом вид сверху по фиг. 10B показывает, что ствол скважины и формация на плоскости ρϕ являются округлыми. Должно быть отмечено, что только пласт радиоактивных осадочных пород глинистого сланца показан на фиг. 10A-10C. Проиллюстрированная дискретизированная модель предусматривает равномерную дискретизацию в цилиндрических координатах. Из изометрического представления по фиг. 10A может быть видно, что расстояние по оси Z изменяется по отношению к углу падения и азимутальному углу. Из вертикального вида сбоку по фиг. 10C может быть видно, что в проиллюстрированном варианте осуществления дискретизированной модели формация содержит совокупность дискретизированных ячеистых плоскостей, каждая из которых параллельна плоскости границы пласта осадочных пород.
Следует отметить, что область интеграла, определяющего интенсивность гамма-излучения на точечном детекторе, как изложено в уравнении (38), приведенном выше, включает в себя радиус формации, который определяется внешним радиусом обсадной трубы до максимальной длины тракта, который могут проходить частицы GR (обычно 2-3 фута), азимутом (от 0 до 2π) и измеренной глубиной (Z), меняющейся по отношению к наклону и фи, при этом все плоскости параллельны границе пласта. Дискретизированный вид интегральной функции, изложенной в уравнении (38), может быть переписан согласно вариантам осуществления изобретения в качестве:
 .
.
Вышеизложенное уравнение без труда может обрабатываться общедоступным и относительно недорогим вычислительным оборудованием, таким как персональные компьютеры. Соответственно, характеристика GR-детектора может эффективно моделироваться или имитироваться согласно вариантам осуществления изобретения, не требуя суперкомпьютеров и неприемлемо длительных времен обработки.
Хотя дискретизация согласно вариантам осуществления настоящего изобретения может выполняться с использованием равномерной сетки в цилиндрических координатах, как показано на фиг. 10A-10C, концепции настоящего изобретения не ограничены использованием равномерных сеток в цилиндрических координатах. Соответственно, варианты осуществления изобретения могут использовать любую систему координат, которая предусматривает быстрое вычисление с достаточной точностью. Согласно одному из вариантов осуществления используется экспоненциально меняющаяся сетка, при этом мелкие ячейки определены вокруг детектора и крупные ячейки определены вдали от детектора. Например, можно предопределить:
 .
.
С использованием вышеприведенного дискретизированная функция уравнения (39) может быть переписана в качестве:
 .
.
Такой вариант осуществления, с реализацией экспоненциально меняющейся сетки, будет радикально уменьшать количество ячеек в режиме чувствительности каротажного зонда, а потому значительно уменьшал бы время вычислений для быстрого моделирования трехмерной характеристики каротажного GR-зонда.
Как обсуждено выше, вышеизложенное аналитическое исследование основано на исходном условии, при котором только частицы гамма-излучения без рассеяния встречаются моделируемым GR-детектором. Соответственно, варианты осуществления изобретения предполагают, что только частицы гамма-излучения из пространственно распределенного источника радиоактивной формации, достигающие GR-детектора посредством нулевого рассеяния, встречаются в моделируемой характеристике каротажного зонда. Однако анализ показал, что такое предположение дает довольно точную модель характеристики GR-детектора.
На фиг. 11A на диаграмме показано количество гамма-лучей в GR-детекторе, связанных с нулевым рассеянием (линия 1101), одинарным рассеянием (линия 1102), двойным рассеиванием (линия 1103), тройным рассеянием (линия 1104), четверным рассеянием (линия 1105), пятерным рассеянием (линия 1106) и шестерным рассеянием (линия 1107), как предусмотрено анализом MCNP. Из убывающей амплитуды линий по мере того, как количество рассеяний возрастает, может приниматься во внимание, что влияние гамма-излучения, имеющего рассеяние более высокого порядка, является пренебрежимо малым. Как может быть видно на фиг. 11A, гамма-излучение, связанное с нулевым рассеянием, содержит приблизительно 32% суммарного детектированного гамма-излучения, тогда как гамма-излучение, связанное с одинарным рассеянием, содержит приблизительно 27%, гамма-излучение, связанное с двойным рассеянием, содержит приблизительно 18%, гамма-излучение, связанное с тройным рассеянием, содержит приблизительно 11%, а гамма-излучение, связанное с четверным рассеянием, содержит приблизительно 5%.
Линия 1100 представляет объединенное количество гамма-излучения различных показанных количеств рассеяний и нормированное пиковым количеством. В последовательности операций нормализации имитированная характеристика каротажного зонда по проиллюстрированному варианту осуществления масштабируется линейно умножением на константу. Константа является обратной величиной пикового количества, например, наибольшего значения количества. Такое линейное масштабирование характеристики каротажного зонда не изменяет формы характеристики, которая совместима с расчетом объема глинистого сланца. Расчет объема глинистого сланца, Vsh, является одним из главных применений гамма-лучевой каротажной диаграммы. Наиболее широко используемая модель Vsh является моделью линейного масштабирования.
 ,
,
где GR max и GR min - максимальное и минимальное значения длинной характеристики. Хотя частицы гамма-излучения, достигающие GR-детектора с нулевым рассеянием, содержат менее чем 50% суммарной характеристики, когда масштабируется в Vsh, основанная на нулевом рассеянии характеристика GR-детектора хорошо согласуется с основанной на суммарных рассеяниях характеристикой. На фиг. 11B показано, что нормализованное количество гамма-излучения, связанное с нулевым рассеянием (линия 1101'), очень близко соответствует нормализованному комбинированному количеству гамма-излучения (линия 1100) и, таким образом, что вышеупомянутое аналитическое исследование дает полезную модель характеристики GR-детектора. Это содействует использованию упрощенных входных параметров согласно вариантам осуществления изобретения. Например, варианты осуществления изобретения, в которых только частицы гамма-излучения, имеющие нулевое рассеяние, подсчитываются при моделировании GR-детектора, могут быть реализованы с использованием упрощенных входных параметров, таких как коэффициент затухания и интенсивность GR, как раз для песка и глинистого сланца (например, μ_ss, μ_sh, n γ _ss и n γ _sh), вместо более сложных входных параметров, таких как μ(i) и интенсивность GR, n γ(i), для каждого слоя (например, i=1, 2, 3, ... n, для n слоев).
Должно быть принято во внимание, что масштабированное и нормализованное количество гамма-излучения, связанное с нулевым рассеянием (например, линия 1101'), может непосредственно сравниваться с каротажными GR-диаграммами, предоставленными посредством измерений в полевых условиях. Соответственно, может легко производиться поддающееся интерпретации сравнение такой смоделированной характеристики каротажного GR-зонда с реальной характеристикой каротажного GR-зонда.
На фиг. 11B дополнительно показано, что нормализованное количество гамма-излучения, связанное с одиночным рассеянием (линия 1102'), также очень близко соответствует нормализованному количеству комбинированного гамма-излучения (линия 1100). Соответственно, варианты осуществления изобретения дополнительно или в качестве альтернативы могут использовать эту информацию. Например, принципы, выраженные в уравнениях (1), (7) и (19), могут быть расширены, чтобы включать в себя все порядки рассеяний с разными энергетическими зонами разными радиоактивными элементами, такими как U, Th и K, в качестве:
 ,
,
где j=U, Th, K или любому другому радиоактивному элементу, а i=0,1,2,3, ... n-ому рассеянию. Вышеизложенный вариант осуществления заметно более сложен, чем варианты осуществления, описанные выше, в которых используется только гамма-излучение с нулевым рассеянием, и, таким образом, вероятно, должен требовать дополнительных вычислительного времени и ресурсов. Соответственно, там, где варианты осуществления, использующие количества гамма-излучения только для нулевого рассеяния, дают достаточную точность, такие варианты осуществления могут быть предпочтительными для быстрых времен вычисления и меньшего использования ресурсов.
Вышеизложенное аналитическое исследование было описано по отношению к точечному GR-детектору. Однако GR-детекторы, реализованные типичными каротажными GR-зондами, имеют размер и объем (например, линейные детекторы или объемные детекторы). Например, обыкновенный кристалл NaI в качестве GR-детектора имеет размер 12 дюймов в длину и 2 дюйма в диаметре. Соответственно, варианты осуществления настоящего изобретения дополнительно используют вышеизложенное аналитическое исследование для предоставления функций дискретизации по отношению к множеству точечных детекторов, при этом конкретные количество и конфигурация точечных детекторов выбираются для относительно точного имитационного моделирования результатов конкретной конфигурации GR-детектора.
Для того чтобы понять отличия, вытекающие из использования точечных детекторов при моделировании GR-детекторов, имеющих размер и объем, была проведена последовательность испытаний дл количественного определения изменений от точечного к линейному, к объемному детекторам. Фиг. 12 иллюстрирует концепцию моделирования характеристики линейного детектора посредством суммирования характеристики множества точечных детекторов, расположенных на лини вдоль направления ствола скважины, которое эквивалентно линейному интегралу. На фиг. 12 дополнительно иллюстрируется концепция моделирования характеристики объемного детектора посредством суммирования характеристики множества линейных детекторов, расположенных в пределах объема пространства объемного детектора, которое эквивалентно интегралу по объему.
Был проведен анализ для определения количества точечных детекторов, равномерно распределенных по линии длины линейного детектора, которое удовлетворительно моделирует характеристику линейного детектора. В случае 12-дюймового линейного детектора были проанализированы характеристики детектора для линий из 3 точечных детекторов, 5 точечных детекторов, 7 точечных детекторов и 13 точечных детекторов. Характеристики детектора были нормализованы характеристиками 13 точечных детекторов и сравнивались для определения влияния использования меньшего количества точечных детекторов для моделирования линейного детектора. Сравнение показало, что есть незначительная разница между характеристиками моделирования линейного детектора 5 точечными детекторами, 7 точечными детекторами и 13 точечными детекторами. Должно быть принято во внимание, что вышеизложенный анализ может использоваться для определения оптимального количества точечных детекторов для разных длин GR-детекторов.
Соответственно, при моделировании GR-детектора в 12 дюймов длиной варианты осуществления настоящего изобретения используют вышеизложенную функцию дискретизации для последовательности 5 точечных детекторов, равномерно распределенных вдоль 12-дюймовой линии, параллельной стволу скважины. Конечно, меньшее или большее количество точечных детекторов может использоваться при моделировании характеристики каротажного GR-зонда, например, где требуется меньшая точность или имеется в распоряжении больше вычислительных ресурсов, если желательно. Вышеизложенная конфигурации 5 точечных детекторов особенно желательна, так как она дает в результате характеристику точечного детектора на каждые 0,25 футов, которые являются номинальной частотой выборки GR-каротажа, используемой в наши дни. После того как рассчитана характеристика первых пяти точек, например, с использованием уравнений (39) или (41), метод коробчатого фильтра может использоваться для объединения пяти точек, чтобы получать характеристику на измеряемой глубине (центрального точечного детектора или точечного детектора 3), для следующей точки измерения с каротажным зондом, перемещающимся на 0,25 футов вниз (или вверх при каротаже вверх), характеристика только одного точечного детектора (нижнего точечного детектора или точечного детектора 1) необходима для объединения с рассчитанными ранее четырьмя характеристиками точечных детекторов (верхних 4 точечных детекторов, или точечных детекторов 2, 3, 4 и 5) для получения характеристики. Это содействует значительно уменьшенным вычислениям для быстрого и эффективного имитационного моделирования каротажного GR-зонда.
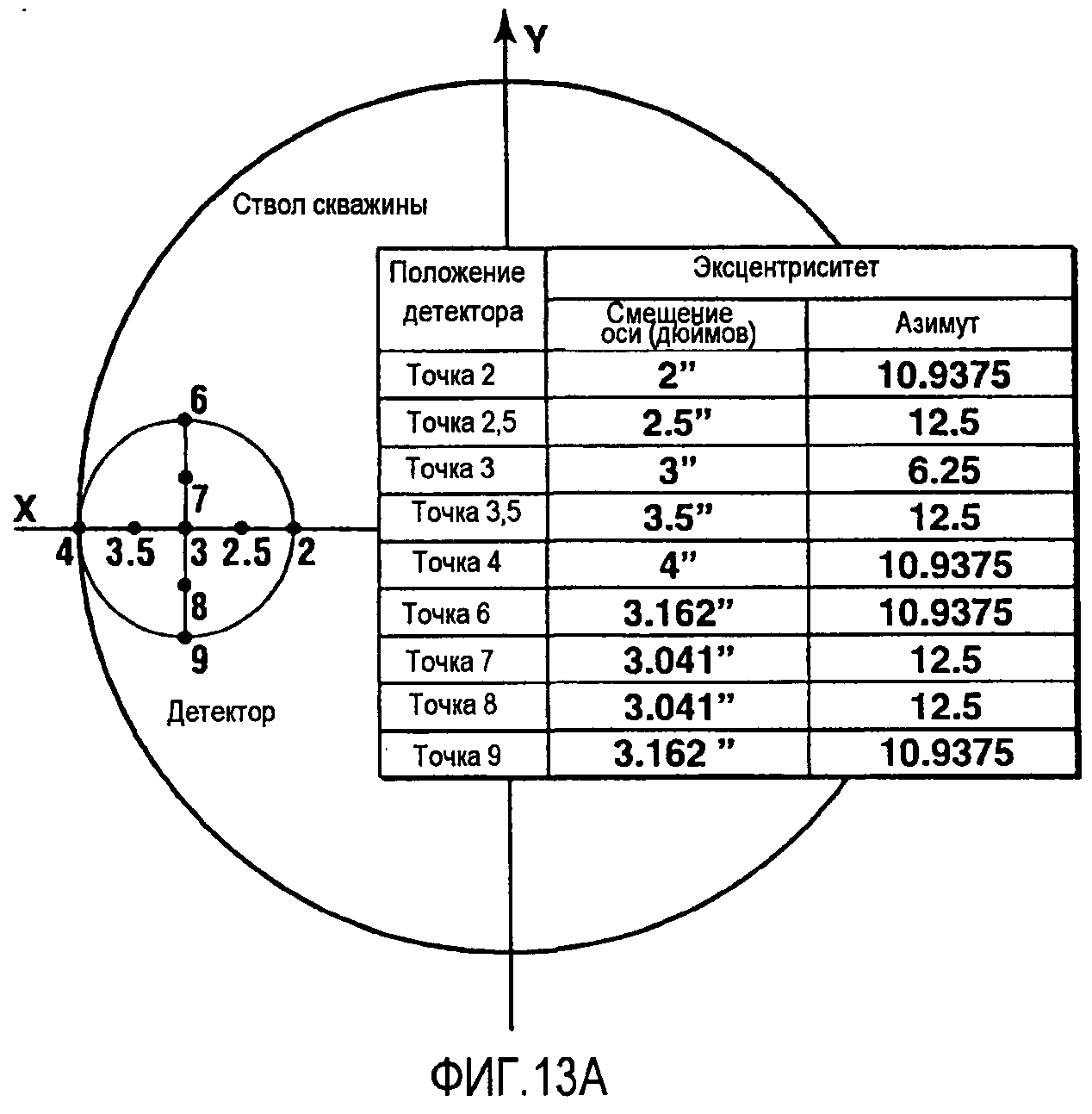
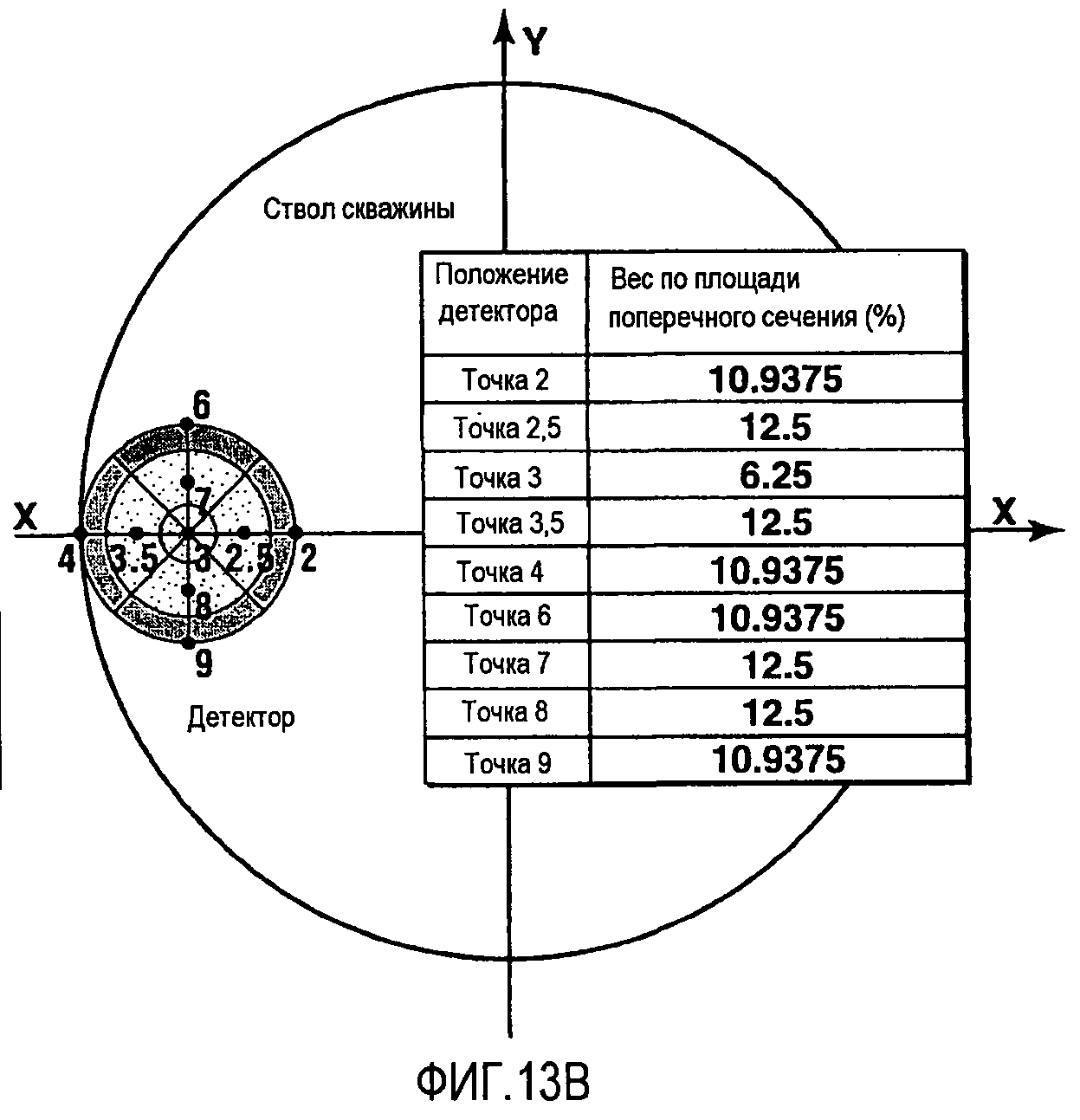
Вышеизложенное показывает, как линейный детектор может быть в достаточной мере представлен множеством точечных детекторов. Однако, как упомянуто ранее, многие каротажные GR-зонды используют объемный GR-детектор. Соответственно, проводился дополнительный анализ, чтобы определить разность характеристики гамма-излучения между настоящим объемным детектором и множеством линейных детекторов, расположенных в объеме объемного детектора. Как показано на фиг. 13A, объем объемного детектора имитировался с использованием 9 линейных детекторов, расположенных в том же самом объеме. Как показано на фиг. 13B, линейным детекторам была назначена площадь поперечного сечения в качестве весов для их вклада в имитируемый объемный детектор. То есть 9 линейных детекторов подразделяются участком своего положения, и веса рассчитываются по связанным площадям на площади поперечного сечения объемного детектора (например, для детектора NaI 2" на 12" π(D/2)2=3,14·(2/2)2=3,14 квадратных дюймов). Должно быть принято во внимание, что фиг. 13A и 13B иллюстрируют случай, где GR-расположен на эксцентрике, таком как в случае конфигурации каротажного GR-зонда LWD.
Рассчитывались нормализованные результаты интенсивности GR имитационного моделирования MCNP, чтобы выяснить профиль и относительный сдвиг от границы пласта относительно оси ствола скважины, для вышеизложенных линейных детекторов с 2 дюймов, 2,5 дюймов, 3 дюймов, 3,5 дюймов и 4 дюймов эксцентрического положения, связанного с имитируемым объемным детектором, расположенным на азимуте 180° в скважине 45° и проходящим через глинистый сланец толщиной 8". Нормализованные амплитуды сравнивались с нормализованной характеристикой линейного детектора, расположенного в смещенном на 3 дюйма от центра положении (центрального линейного детектора по фиг. 13A и 13B). Было обнаружено, что есть незначительная разница в интенсивности GR между линейными детекторами, используемыми при имитационном моделировании объемного детектора, такие разницы были даже меньшими, когда характеристики были нормализованными. Соответственно, варианты осуществления изобретения моделируют объемный детектор с использованием одиночного линейного детектора, расположенного на оси объемного детектора (то есть линейного детектора, показанного в эксцентрическом на 3 дюйма центральном положении на фиг. 13A). Как показано выше, линейный детектор может моделироваться с использованием надлежащего количества точечных детекторов, расположенных вдоль линии, соответствующей линейному детектору. Соответственно, варианты осуществления изобретения моделируют объемный детектор с использованием множества точечных детекторов (например, 5 точечных детекторов), расположенных вдоль линии, соответствующей продольной оси объемного детектора, являющегося моделируемым.
Как может приниматься во внимание из вышеизложенного, моделирование характеристики каротажного GR-зонда, предусмотренное согласно вариантам осуществления изобретения, содействует практичному и относительно быстрому имитационному моделированию, такому как могущее быть использованным в качестве вспомогательного средства при интерпретации каротажной GR-диаграммы. Экспериментирование показало, что имитационное моделирование каротажного GR-зонда, предусмотренное согласно вариантам осуществления настоящего изобретения, близко соответствует моделированию той же самой формации с использованием алгоритмов MCNP. Такие основанные на MCNP технологии имитационного моделирования широко распространены в качестве точного моделирования характеристики каротажного GR-зонда, тем самым показывая, что вышеизложенное гибридное решение моделирования может полагаться на обеспечение полезного моделирования характеристики каротажного GR-зонда. Использование технологий по настоящему изобретению, однако может выполняться с вычислительными быстродействиями, более 100 раз быстрейшими, чем связанные с основанными на MCNP технологиями имитационного моделирования. Таким образом, варианты осуществления могут быть реализованы с использованием недорогих и широкодоступных вычислительных платформ, таких как персональные компьютеры, тем самым содействуя экономичному и практичному имитационному моделированию каротажного GR-зонда.
Когда реализованы в программном обеспечении, элементы настоящего изобретения по существу являются кодовыми сегментами для выполнения вышеупомянутых операций. Программа или кодовые сегменты могут храниться на машиночитаемом носителе или передаваться компьютерным информационным сигналом, воплощенным в несущей волне, или сигналом, модулированным несущей, через среду передачи. Машиночитаемый носитель может включать в себя любой носитель, который может хранить информацию, такой как могущий содержать электронную схему, полупроводниковое устройство памяти, постоянное запоминающее устройство (ПЗУ, ROM), флэш-память, стираемое ПЗУ (СПЗУ, EROM), программируемое ПЗУ (ППЗУ, PROM), гибкий диск, постоянное запоминающее устройство на компакт-диске (CD-ROM), оптический диск, жесткий диск и т.д. Кодовые сегменты могут загружаться через компьютерные сети, такие как сеть Интернет, интранет, локальная сеть (LAN), глобальная сеть (WAN), беспроводная сеть, коммутируемая телефонная сеть общего пользования (PSTN), сеть кабельной передачи и т.д.
На фиг. 14 показа компьютерная система 1400 для реализации вариантов осуществления настоящего изобретения. В проиллюстрированном варианте осуществления компьютерной системы 1400 центральное процессорное устройство 1401 (ЦПУ, CPU) присоединено к системной шине 1402. ЦПУ 1401 может быть любым ЦПУ общего применения, таким как процессор PENTIUM, процессор POWERPC и т.д. Однако настоящее изобретение не ограничено архитектурой ЦПУ 1401 до тех пор, пока ЦПУ 1401 поддерживает обладающие признаком изобретения операции, которые описаны в материалах настоящей заявки. Шина 1402 присоединена к оперативному запоминающему устройству 1403 (ОЗУ, RAM), которая может содержать SRAM (статическое ОЗУ), DRAM (динамическое ОЗУ), SDRAM (синхронное динамическое ОЗУ) и т.д. ПЗУ 1404, такое как могущее содержать ППЗУ, СППЗУ (стираемое программируемое ПЗУ, EPROM), электрически стираемое ППЗУ (ЭСППЗУ, EEPROM) и т.д., также присоединено к шине 1402 в проиллюстрированном варианте осуществления. ОЗУ 1403 и ПЗУ 1404 хранят пользовательские и системные данные и программы, как хорошо известно в данной области техники.
Шина 1402 также присоединена к контроллеру 1405 ввода/вывода (I/O), адаптеру 1411 связи, адаптеру 1408 пользовательского интерфейса и адаптеру 1409 дисплея. Адаптер 1405 I/O присоединяет устройства 1406 хранения данных, такие как могущие содержать одно или более из жесткого диска, CD-привода, накопителя на гибких дисках, накопителя на магнитной ленте и т.д., к компьютерной системе. Адаптер 1405 I/O по проиллюстрированному варианту осуществления также присоединен к принтеру 1414, который предоставляет компьютерной системе возможность печатать бумажные копии информации, такие как документ, фотографии, статьи и т.д. Отметим, что принтер может быть принтером (например, матричным, лазерным и т.д.), факсимильным аппаратом, копировальной машиной и т.д. Адаптер 1411 связи приспособлен для присоединения компьютерной системы 1400 к сети 1412, которая может содержать одно или более из PSTN, LAN, WAN, сети Интернет, интранет, экстранет и т.д. Адаптер 1408 пользовательского интерфейса присоединяет устройства пользовательского ввода, такие как клавиатура 1413, координатно-указательное устройство 1407 и микрофон 1416, к компьютерной системе 1400. Адаптер 1408 пользовательского интерфейса также обеспечивает звуковой вывод пользователю через динамик(и) 1415. Плата 1409 дисплея управляется ЦПУ 1401 для управления отображением на устройстве 1410 отображения.
Вышеизложенные компоненты компьютерной системы 1400, работающие под управлением кодовых сегментов, определяющих работу, как описано в материалах настоящей заявки, могут использоваться для обеспечения имитационного моделирования каротажного GR-зонда по вариантам осуществления настоящего изобретения. Такие варианты осуществления, таким образом, могут быть реализованы с использованием недорогих и широкодоступных вычислительных платформ, таких как персональные компьютеры, тем самым содействуя экономичному и практичному имитационному моделированию каротажного GR-зонда.
Хотя настоящее изобретение и его преимущества были подробно описаны, должно быть понятно, что различные изменения, замены и переделки могут быть произведены в материалах настоящей заявки, не выходя из сущности и объема изобретения, которые определены прилагаемой формулой изобретения. Более того, объем настоящей заявки не подразумевается ограниченным конкретными вариантами осуществления технологического процесса, машины, производства, смеси веществ, средства, способов и этапов, описанных в описании изобретения. Как рядовой специалист в данной области техники без труда поймет из описания настоящего изобретения, технологические процессы, машины, производство, смеси веществ, средства, способы или этапы, существующие сегодня или должные быть разработанными позже, которые выполняют по существу такую же функцию или достигают по существу такого же результата, как соответствующие варианты осуществления, описанные в материалах настоящей заявки, могут использоваться согласно настоящему изобретению. Соответственно, прилагаемая формула изобретения подразумевается включающей в пределы своего объема такие технологические процессы, машины, производство, смеси материалов, средства, способы или этапы.
Способ разведки и система для обнаружения углеводородов с использованием подводного аппарата
Ортогональное кодирование источника и приемника
Способ наблюдения за коллектором с использованием данных о скученных изотопах и/или инертных газах
Способы для аппроксимации операции умножения гессиана на вектор в полной инверсии волнового поля
Многопараметрическая инверсия через зависящую от сдвига упругую полноволновую инверсию (fwi)
Система сепарации мультифазного потока
Система многофазной сепарации
Системы и способы вспомогательного уплотнения перфорации в скважинной обсадной колонне
Система и способы удаления захваченной жидкости
Подводная система (варианты) и способ сепарации многофазных сред
Способ разведки и система для обнаружения углеводородов с использованием подводного аппарата
Ортогональное кодирование источника и приемника
Способ наблюдения за коллектором с использованием данных о скученных изотопах и/или инертных газах
Способы для аппроксимации операции умножения гессиана на вектор в полной инверсии волнового поля
Многопараметрическая инверсия через зависящую от сдвига упругую полноволновую инверсию (fwi)
Система сепарации мультифазного потока
Система многофазной сепарации
Системы и способы вспомогательного уплотнения перфорации в скважинной обсадной колонне
Система и способы удаления захваченной жидкости
Подводная система (варианты) и способ сепарации многофазных сред

