Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к ракетам космического назначения (РКН).
В ракетной технике известны способы управления угловым движением ракет космического назначения, основанные на использовании газодинамических органов управления (поворотных маршевых и рулевых двигателей, газоструйных рулей и др.), а также аэродинамических органов управления и органов управления положением центра масс ([1], стр.65-75).
Наиболее близким по технической сущности к предлагаемому изобретению является выбранный в качестве прототипа способ управления угловым движением ракеты космического назначения с помощью отклонения установленных по крестообразной схеме камер сгорания четырехкамерной двигательной установки, заключающийся в выработке трех командных сигналов  ,
,  ,
,  по тангажу, рысканию и вращению соответственно, в выработке четырех управляющих сигналов δ1, δ2, δ3, δ4 на отклонение камер сгорания двигателя, расположенных в полуплоскостях I, II, III и IV соответственно, в повороте камер, расположенных в полуплоскостях II и IV, для создания момента тангажа, в повороте камер, расположенных в полуплоскостях I и III, для создания момента рыскания, в повороте камер сгорания для создания момента вращения, причем результирующий угол отклонения каждой камеры сгорания формируется как алгебраическая сумма углов , , ([1], стр.67, 70).
по тангажу, рысканию и вращению соответственно, в выработке четырех управляющих сигналов δ1, δ2, δ3, δ4 на отклонение камер сгорания двигателя, расположенных в полуплоскостях I, II, III и IV соответственно, в повороте камер, расположенных в полуплоскостях II и IV, для создания момента тангажа, в повороте камер, расположенных в полуплоскостях I и III, для создания момента рыскания, в повороте камер сгорания для создания момента вращения, причем результирующий угол отклонения каждой камеры сгорания формируется как алгебраическая сумма углов , , ([1], стр.67, 70).
Недостатком известного способа является то обстоятельство, что при превышении абсолютной величиной управляющего сигнала |δi| своего максимально допустимого значения δmax (т.е. при выходе сигнала δi «на упор» δmax или -δmax) командные сигналы , , реализуются с ошибками, что ухудшает характеристики устойчивости и управляемости ракеты в угловом движении. При этом возможности двигательной установки по реализации требуемых управляющих моментов в каналах тангажа, рыскания и вращения используются не полностью.
Задачей предложенного изобретения является разработка способа управления угловым движением РКН, обеспечивающего повышение точности реализации командных сигналов , , при превышении абсолютной величиной одного из управляющих сигналов |δi| своего максимально допустимого значения δmax (т.е. при выходе сигнала δi «на упор» δmax или -δmax).
Техническим результатом предлагаемого изобретения является улучшение характеристик устойчивости и управляемости ракеты в угловом движении за счет полного использования возможностей двигательной установки по реализации требуемых управляющих моментов в каналах тангажа, рыскания и вращения.
Указанный технический результат достигается тем, что в способе управления угловым движением ракеты космического назначения с помощью отклонения установленных по крестообразной схеме камер сгорания четырехкамерной двигательной установки, заключающемся в выработке трех командных сигналов , , по тангажу, рысканию и вращению соответственно, в выработке четырех управляющих сигналов δ1, δ2, δ3, δ4 на отклонение камер сгорания двигателя, расположенных в полуплоскостях I, II, III и IV соответственно, в повороте камер, расположенных в полуплоскостях II и IV, для создания момента тангажа, в повороте камер, расположенных в полуплоскостях I и III, для создания момента рыскания, в повороте камер сгорания для создания момента вращения, причем результирующий угол отклонения каждой камеры сгорания формируют как алгебраическую сумму углов , , , в соответствии с изобретением в случае превышения абсолютной величиной одного из управляющих сигналов δi своего максимально допустимого значения δmax производят перераспределение управляющих сигналов между камерами по следующему закону:
 ;
;  ; j≠i,
; j≠i,
где знак «+» используют, если j-я и i-я камеры являются смежными, а знак «-» - если j-я и i-я камеры противоположны.
Сущность предлагаемого изобретения иллюстрируется чертежами.
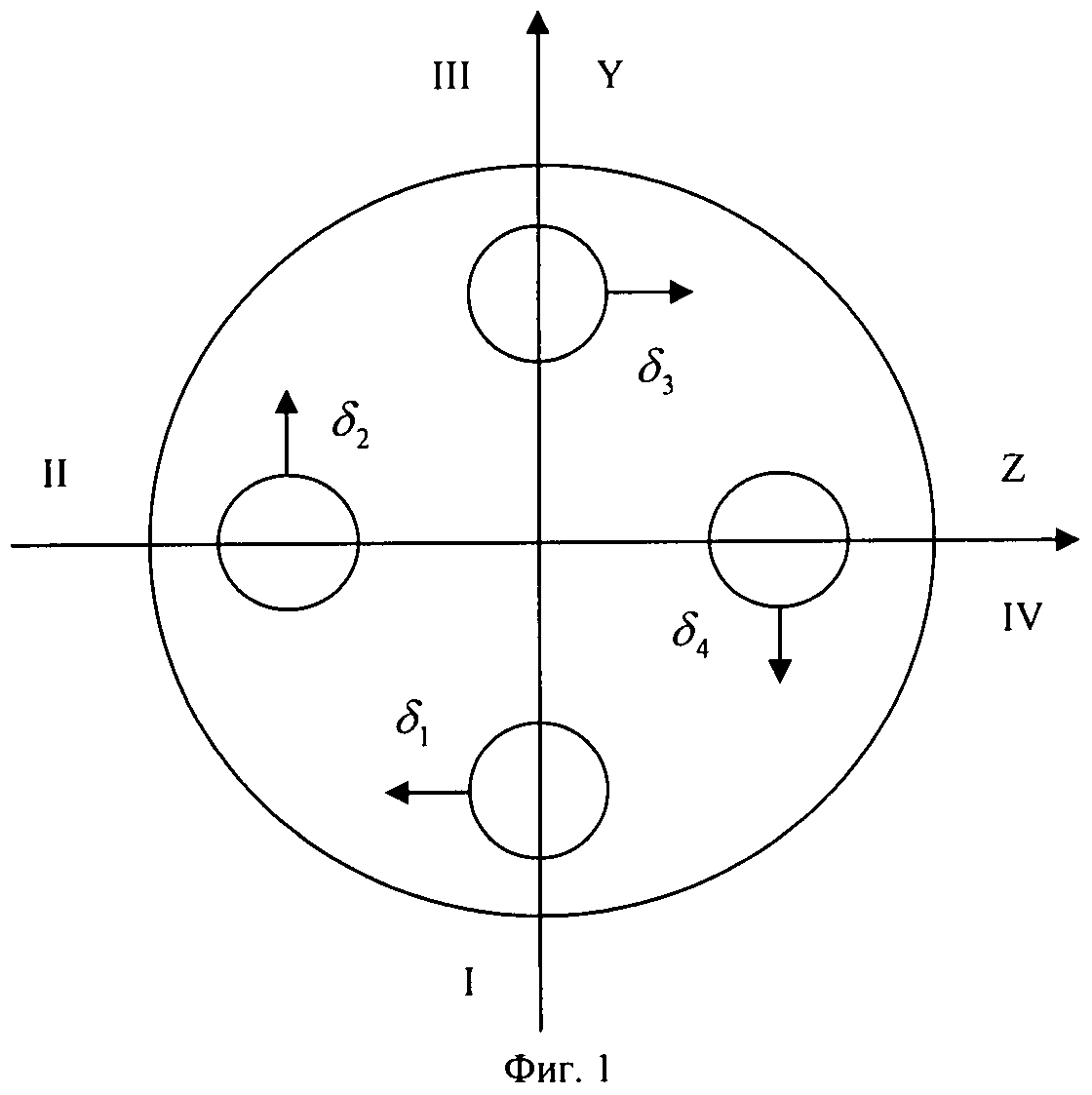
Фиг.1 - Схема расположения камер двигателя.
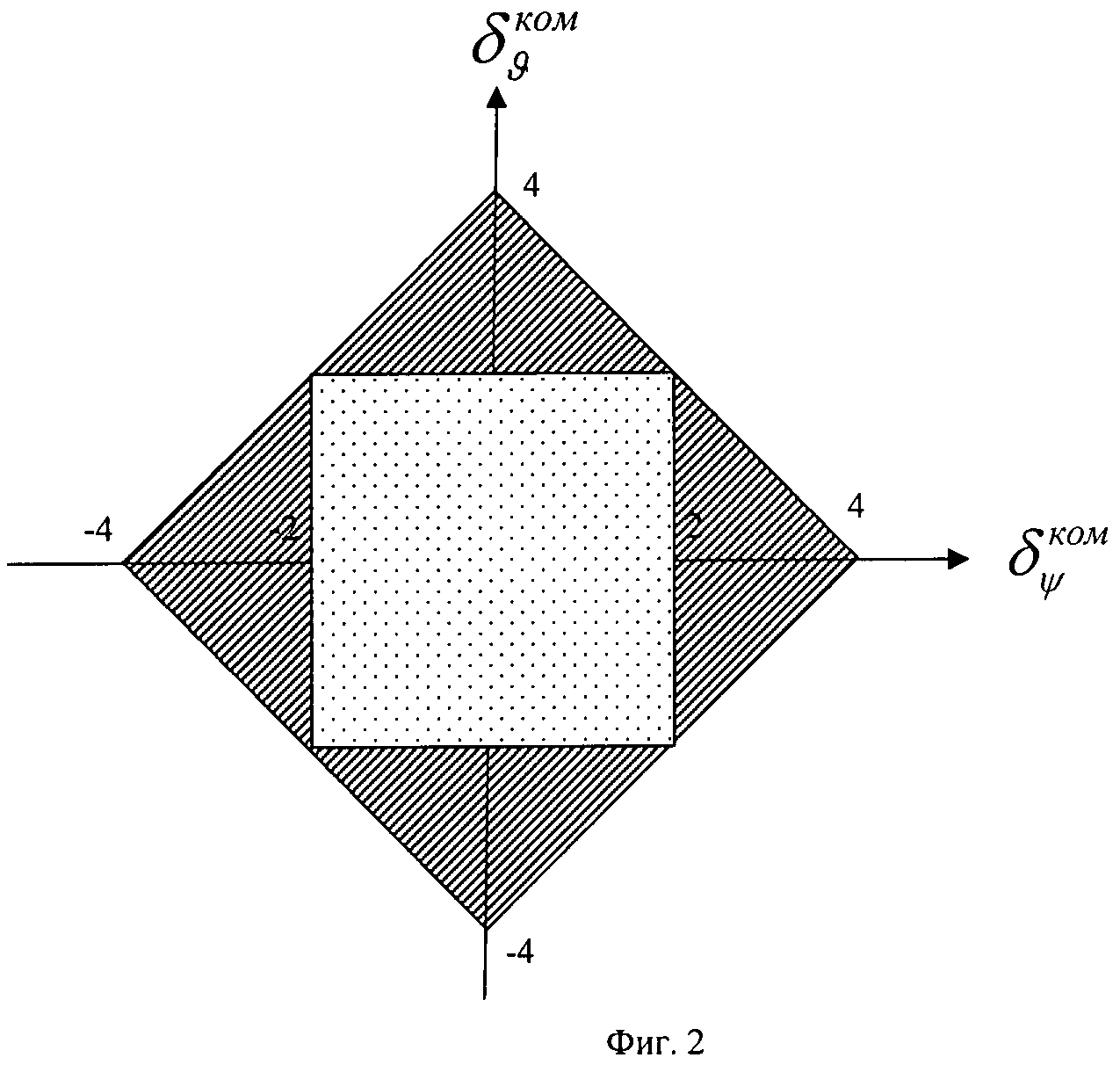
Фиг.2 - Области реализуемых углов отклонения обобщенных органов управления с ошибкой σ=0° и σ*=0°.
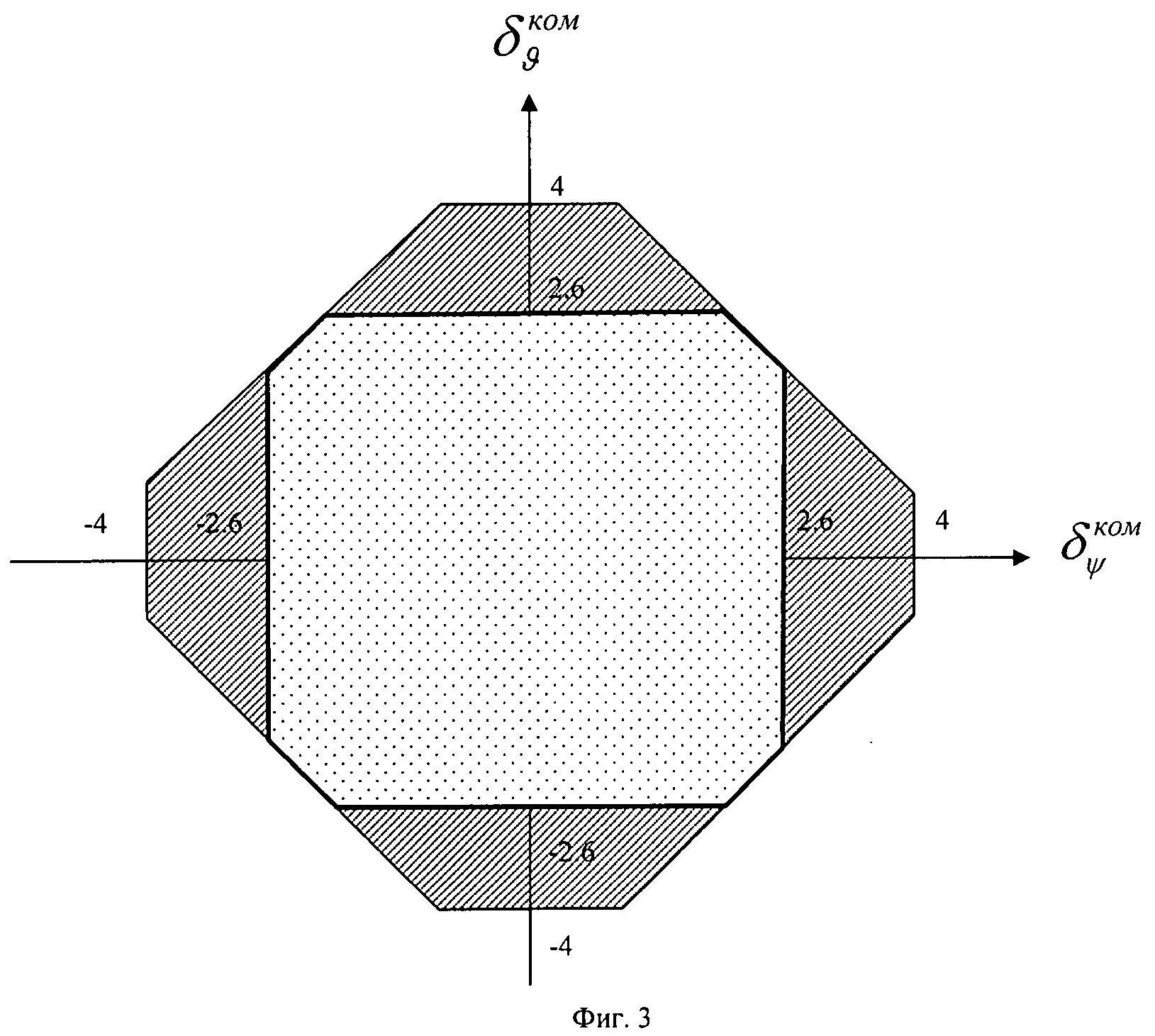
Фиг.3 - Области реализуемых углов отклонения обобщенных органов управления с ошибкой σ<0,5° и σ*<0,5°.
На фиг.1 показано расположение по крестообразной схеме камер сгорания четырехкамерного двигателя. Предполагается, что камеры могут отклоняться от нейтрального положения в обе стороны в тангенциальном направлении, причем абсолютная величина отклонения каждой камеры не может превосходить максимального значения δmax. На фиг.1 указаны также принятые в данном изобретении положительные направления отклонения камер.
Для создания момента тангажа (момента относительно связанной оси OZ) необходимо отклонять камеры, установленные в полуплоскостях II и IV. При отклонении этих камер на углы δ2 и δ4 соответственно на РКН подействует момент тангажа относительно центра масс (ЦМ) РКН MZ=Pl(sinδ2-sinδ4), где Р - сила тяги, создаваемая одной камерой, l - расстояние от ЦМ РКН до плоскости, проходящей через центры качания камер. Углы отклонения камер обычно малы, поэтому MZ≈Pl(δ2-δ4). Для создания этого же момента потребуется отклонение двух камер на одинаковый угол δϑ: MZ=2Plδϑ. Следовательно, выражение для угла отклонения обобщенного органа управления в канале тангажа имеет вид
 .
.
Аналогично можно получить формулы для углов отклонения обобщенных органов управления в каналах рыскания и вращения:

В способе-прототипе система управления вырабатывает командные сигналы на отклонение обобщенных органов управления , , . В идеале фактические углы отклонения обобщенных органов должны совпасть с командными:

Для этого в способе-прототипе управляющие сигналы на отклонение камер сгорания формируются как алгебраические суммы углов , , , т.е. суммы, в которые слагаемые могут входить со знаками «+» или «-». Учитывая, что камеры расположены симметрично относительно плоскостей симметрии и продольной оси РКН и, кроме того, что камеры, расположенные в плоскости I-III, не создают при своем отклонении момента тангажа, а камеры, расположенные в плоскости II-IV, не создают при своем отклонении момента рыскания, получим, что указанные алгебраические суммы имеют вид

Если абсолютная величина отклонения ни одной из камер не превосходит максимального значения δmax, то при использовании алгебраических сумм (5) условия (4) точно выполняются, т.е. способ-прототип обеспечивает точную реализацию командных сигналов , , . Однако, если хотя бы один из управляющих сигналов δi выходит «на упор» δmax или -δmax, точность реализации командных сигналов нарушается. Приведем численный пример. Предположим, что командные сигналы на отклонение обобщенных органов управления равны  ;
; 
 , а максимальное значение абсолютной величины угла отклонения камеры составляет δmax=4°. По формулам (5) определим необходимые углы отклонения камер: δ1=1°; δ2=-0,9°; δ3=3°; δ4=4,9°. Однако из-за наличия ограничения на максимальный угол отклонения камеры фактический угол отклонения камеры, расположенной в IV полуплоскости, составит не 4,9°, а 4°. При этом, как это следует из формул (1)-(3), реализованные углы обобщенных органов управления составят: δϑ=2,45°; δΨ=1°; δφ=1,775°. Ошибка в реализации командного сигнала тангажа составляет 0,45°, ошибка реализации командного сигнала вращения 0,225°.
, а максимальное значение абсолютной величины угла отклонения камеры составляет δmax=4°. По формулам (5) определим необходимые углы отклонения камер: δ1=1°; δ2=-0,9°; δ3=3°; δ4=4,9°. Однако из-за наличия ограничения на максимальный угол отклонения камеры фактический угол отклонения камеры, расположенной в IV полуплоскости, составит не 4,9°, а 4°. При этом, как это следует из формул (1)-(3), реализованные углы обобщенных органов управления составят: δϑ=2,45°; δΨ=1°; δφ=1,775°. Ошибка в реализации командного сигнала тангажа составляет 0,45°, ошибка реализации командного сигнала вращения 0,225°.
В соответствии с данным изобретением в случае в случае превышения абсолютной величиной одного из управляющих сигналов δi своего максимально допустимого значения δmax производят перераспределение управляющих сигналов между камерами по следующему закону

где знак «+» используется, если j-я и i-я камеры являются смежными, а знак «-» - если j-я и i-я камеры противоположны. Например, если |δ4|>δmax, т.е. i=4, то управляющие сигналы перераспределяются следующим образом:
 ;
;
 ;
;
 ;
;
 .
.
При этом если  , i=1, 2, 3, то точно реализуются все 3 командных угла на отклонение обобщенных органов управления в каналах тангажа, рыскания и вращения:
, i=1, 2, 3, то точно реализуются все 3 командных угла на отклонение обобщенных органов управления в каналах тангажа, рыскания и вращения:


 .
.
В частности, в рассмотренном выше примере ;  , δ1=1°; δ2=-0,9°; δ3=3°; δ4=4,9°. Угол δ4 превысил максимально допустимое значение δmax=4°. После перераспределения управляющих сигналов получим
, δ1=1°; δ2=-0,9°; δ3=3°; δ4=4,9°. Угол δ4 превысил максимально допустимое значение δmax=4°. После перераспределения управляющих сигналов получим  ;
;  ;
;  ;
;  . При этом
. При этом  ;
;  ;
;  , т.е. командные сигналы на обобщенные органы управления реализовались точно.
, т.е. командные сигналы на обобщенные органы управления реализовались точно.
Если после перераспределения управляющих сигналов (δi в  ) условия
) условия  выполняются не всех значении i, то командные сигналы , , реализуются с ошибками, суммарную величину которых можно оценить выражением
выполняются не всех значении i, то командные сигналы , , реализуются с ошибками, суммарную величину которых можно оценить выражением  . В идеале при точной реализации σ*=0. Расчеты показали, что при использовании предлагаемого в изобретении способа управления ошибка реализации σ∗ меньше или равна, чем соответствующая ошибка σ, реализуемая способом-прототипом. Это утверждение иллюстрируется фиг.2 и фиг.3, на которых в плоскости командных сигналов ,
. В идеале при точной реализации σ*=0. Расчеты показали, что при использовании предлагаемого в изобретении способа управления ошибка реализации σ∗ меньше или равна, чем соответствующая ошибка σ, реализуемая способом-прототипом. Это утверждение иллюстрируется фиг.2 и фиг.3, на которых в плоскости командных сигналов ,  (командный сигнал фиксирован и для примера равен 2°) показаны области командных сигналов, которые реализуются с ошибкой 0 (фиг.2) и с ошибкой не более 0,5°, как при использовании способа-прототипа (область обозначена точками), так и при использовании предлагаемого способа (дополнительная к возможностям прототипа область обозначена штриховкой). Из сравнения этих областей видно, что предлагаемый способ позволяет повысить точность отработки командных сигналов и тем самым улучшает характеристики устойчивости и управляемости движения РКН за счет полного использования возможностей двигательной установки по реализации требуемых управляющих моментов.
(командный сигнал фиксирован и для примера равен 2°) показаны области командных сигналов, которые реализуются с ошибкой 0 (фиг.2) и с ошибкой не более 0,5°, как при использовании способа-прототипа (область обозначена точками), так и при использовании предлагаемого способа (дополнительная к возможностям прототипа область обозначена штриховкой). Из сравнения этих областей видно, что предлагаемый способ позволяет повысить точность отработки командных сигналов и тем самым улучшает характеристики устойчивости и управляемости движения РКН за счет полного использования возможностей двигательной установки по реализации требуемых управляющих моментов.
Источники информации
1. Г.Н.Разоренов, Э.А.Бахрамов, Ю.Ф. Титов. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями). М.: Машиностроение, 2003 г.
Способ управления угловым движением ракеты космического назначения с помощью отклонения установленных по крестообразной схеме камер сгорания четырехкамерной двигательной установки, заключающийся в выработке трех командных сигналов , , - по тангажу, рысканию и вращению соответственно, в выработке четырех управляющих сигналов δ, δ, δ, δ на отклонение камер сгорания двигательной установки, расположенных в полуплоскостях I, II, III и IV соответственно, в повороте камер, расположенных в полуплоскостях II и IV, для создания момента тангажа, в повороте камер, расположенных в полуплоскостях I и III, для создания момента рыскания и в повороте камер сгорания для создания момента вращения, причем результирующий угол отклонения каждой камеры сгорания формируют как алгебраическую сумму углов , , , отличающийся тем, что в случае превышения абсолютной величиной одного из управляющих сигналов δ своего максимально-допустимого значения δ производят перераспределение управляющих сигналов между камерами по следующему закону ; ; j≠i,где знак «+» используют, если j-я и i-я камеры являются смежными, а знак «-» - если j-я и i-я камеры противоположны.









Многоразовый ускоритель первой ступени ракеты-носителя на базе унифицированного ракетного блока
Устройство для соединения и разъединения трубопроводов бортового агрегата
Агрегатированная горелка
Многоразовый возвращаемый ракетный блок
Способ управления движением ракеты-носителя на начальном участке полета
Редуктор давления газа
Способ измерения расхода жидкости
Космическая энергетическая установка с машинным преобразованием энергии
Регулятор расхода
Запорное устройство соединения магистралей
Многоразовый ускоритель первой ступени ракеты-носителя на базе унифицированного ракетного блока
Устройство для соединения и разъединения трубопроводов бортового агрегата
Агрегатированная горелка
Многоразовый возвращаемый ракетный блок
Способ управления движением ракеты-носителя на начальном участке полета
Редуктор давления газа
Способ измерения расхода жидкости
Космическая энергетическая установка с машинным преобразованием энергии
Регулятор расхода
Запорное устройство соединения магистралей

