Результат интеллектуальной деятельности: КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на электровозах постоянного и переменного тока, эксплуатируемых в пассажирском, скоростном, высокоскоростном и грузовом движении поездов, магистральных и маневровых тепловозах, электропоездах, в том числе применяемых и для высокоскоростного движения, дизель-поездах и автомотрисах (рельсовых автобусах), а также в составе многоуровневых систем интервального регулирования.
Известно устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, ко входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок вычисления координаты местонахождения локомотива, подключенный к межмодульному интерфейсу (RU 94943 U1, B61L 25/04, 10.06.10).
Недостатками этого устройства являются:
- недостаточность сигнальных показаний для оперативного принятия решений машинистом;
- отсутствие достаточной гибкости в выборе оптимального скоростного режима;
- устаревшая элементная база.
Наиболее близким к заявляемому устройству является выбранное в качестве прототипа устройство контроля за управлением локомотивом и бдительностью машиниста, представляющее собой открытую гибкую систему реального времени с модульной архитектурой и содержащее соединенные между собой объединительной платой ячейки схемы контроля безопасности, двухканального модуля центральной обработки, двухканального модуля измерения параметров движения, двухканального модуля внешних устройств, модуля маршрута и модуля радиоканала. Модули устройства взаимодействуют между собой посредством системного интерфейса CAN, используются цифровая радиосвязь и спутниковая навигация (RU 2262459 С2, B61L 25/04).
Недостатком этого устройства являются:
- использование устройств согласования цифровой информации для передачи данных от подсистем, что увеличивает время обработки информации и снижает точность;
- отсутствие дополнительного цифрового интерфейса для получения данных от внешних автономных модулей, что увеличивает время на обработку информации, а так же снижает точность принятых данных;
- отсутствие прицельного торможения, позволяющее производить автоматическую остановку поезда, у заданной точки прицельной остановки, для ликвидации дополнительных подключений локомотива к источнику тяги и, как следствие, экономии энергоресурсов;
- отсутствие возможности обработки информации от путевых генераторов системы автоматического торможения поезда (САУТ), для получения информации о маршруте приема и следования по станции, скоростях следования по маршруту и его длине, координате прицельной остановки, о действующих ограничениях скорости и занятости перегона с целью предотвращения проездов запрещающих сигналов;
- использование передачи данных по радиоканалу на частоте 160 МГц, что снижает функциональность устройства при отсутствии станционных устройств;
- отсутствие возможности обмена данными с локомотивными микропроцессорными устройствами, что приводит к отсутствию однообразия источников информации, к различным значениям параметров, используемых в расчетах, и не возможности реализации алгоритмов существующими локомотивными исполнительными устройствами;
- отсутствие возможности приема и обработки дискретных сигналов, а так же управления исполнительными устройствами.
Технический результат предлагаемого изобретения заключается в повышении точности и быстродействия обработки и передачи информации, расширении функциональных возможностей за счет обработки информации от путевых генераторов системы автоматического управления торможением для получения информации о маршруте следования и приеме на станцию, расчете прицельного торможения для предотвращения проезда запрещающих сигналов и использования синхронизации данных с помощью спутников глобальной навигационной системы, повышении помехоустойчивости комплекса, увеличении количества обрабатываемых интерфейсов.
Технический результат достигается тем, что в комплексное устройство контроля безопасности движения поезда, содержащее соединенные между собой объединительной платой модули схемы контроля безопасности, двухканальные модули центральной обработки, подключенные к внутреннему CAN интерфейсу, усилители, соединенные с электропневматическим клапаном, при этом дополнительные входы/выходы модулей центральной обработки соединены с входами/выходами соответственно первого и второго модулей схемы контроля безопасности, входы/выходы которых соединены с усилителями электропневматического клапана, согласно изобретению введены и подключены к внутреннему CAN интерфейсу модуль спутниковой навигационной системы с электронной картой, вход которого соединен с совмещенной антенной, модуль вычислителя системы автоматического управления торможением, второй порт которого подключен к дополнительному цифровому интерфейсу RS-485 через фильтр, предназначенный для подключения устройства к линиям связи, модуль контроллера телемеханической системы контроля бодрствования машиниста, модуль шлюз - CAN, дополнительные порты которого соединены с внешним CAN интерфейсом и радиомодемом, второй порт которого через дуплексный фильтр соединен с радиоантенной, модуль входных дискретных сигналов, вход которого через фильтр подключен к источнику дискретных сигналов, модуль вывода сигналов, выход которого подключен к исполнительным устройствам, к внешнему CAN интерфейсу подключены приемопередающий модуль TETRA и приемопередающий модуль GSM/GSM-R, причем их порты через диплексер подключены к совмещенной антенне.
Структурная схема предложенного устройства включает в себя:
- высокочастотное оборудование, которое обеспечивает двухсторонний обмен информацией и командами между стационарным (диспетчерским) пунктом и подвижным составом по цифровому радиоканалу на частотах 160 МГц, Tetra, GSM и/или GSM-R, состоит из:
- приемопередающего модуля 2 GSM/GSM-R, который принимает и передает телеметрическую информацию посредством каналов связи стандарта GSM, осуществляет обработку, хранение данных, поступающих из CAN-линии и радиоканала;
- диплексера 3, обеспечивающего совместную работу радиомодулей в качестве разделителя и сумматора радиосигналов различной частоты (различных стандартов радиосвязи).
- приемопередающего модуля 4 TETRA, который принимает и передает телеметрическую информацию посредством каналов связи стандарта Tetra, осуществляет обработку, хранение данных, поступающих из CAN-линии и радиоканала;
- радиомодема 5 160 МГц, который принимает и передает телеметрическую информацию посредством каналов связи на частоте 160 МГц;
- дуплексного фильтра 6, который обеспечивает одновременную работу цифровой и поездной радиостанций на частоте 160 МГц с использованием одной общей антенны, как для приема, так и для передачи без взаимных помех.
- аппаратуру управления, которая включает в себя:
- двухканальный модуль 9, 10 центральной обработки информации ЦО, который производит контроль работоспособности на основании данных, полученных от других модулей по внутреннему, внешнему CAN интерфейсам и дополнительному цифровому интерфейсу RS-485, контролирует их работоспособность, на основании этих данных, а так же данных, хранящихся в его энергонезависимой памяти, и данных от модуля 7, 8, схемы контроля безопасности СБ, формирует окончательные значения допустимой и целевой скоростей движения, о режиме работы устройства, о необходимости проведения периодического или однократного контроля бдительности, с учетом физиологического состояния машиниста, кроме того, формирует данные для управления исполнительными устройствами 24, данные для их сравнения модулем 7,8 схемы контроля безопасности СБ, а так же данные для передачи по внутреннему, внешнему CAN интерфейсам и дополнительному цифровому интерфейсу RS-485;
- модули 7, 8 схемы контроля безопасности СБ, которые производят аппаратное сравнение данных, полученных от модулей 9, 10 центральной обработки информации ЦО по двум каналам, и в случае их соответствия выдает сигнал на усилители 17, 18 электропневматического клапана ЭПК о необходимости подачи напряжения питания с электропневматического клапана 20 ЭПК, а в случае их рассогласования формирует сигнал перезапуска модулей 9, 10 центральной обработки информации ЦО и сигнал, передаваемый в усилители 17. 18 ЭПК о необходимости снятия напряжения с клапана 20 ЭПК;
- дублирующая схема, содержащая модули 9, 10 ЦО, модули 7, 8 СБ, 17, 18 УК выполняет функции основной цепи (ЦО, СБ, УК) в случае перезапуска модуля 9, 10 ЦО основной цепи;
- модуль 1 спутниковой навигационной системы и электронной карты ЭК-СНС, который принимает и обрабатывает данные с использованием Глобальной навигационной спутниковой системы (ГЛОНАСС), совместно с уже используемой Global Positioning System (GPS) от совмещенной антенны 21 АЛ2/460/900/Н, на основании получаемых данных о текущих значениях времени, скорости и географических координатах данных электронной карты, хранящихся в энергонезависимой памяти модуля 1 ЭК-СНС, производит вычисление железнодорожной координаты локомотива и другие параметры движения (допустимой и целевой скоростей), типа и названия впереди лежащего по ходу движения поезда железнодорожного объекта, расстояния до него;
- модуль 14 шлюз-CAN предназначен для согласования взаимодействия с микропроцессорными системами, подключенными по внешней линии связи CAN, в части получения информации о состоянии подключенных устройств, передает на станцию данные о поезде и параметры движения, принимает команды на ограничение скорости движения, включение служебного или экстренного торможения, разрешение проезда запрещающего сигнала, декодирует принятую информацию и обеспечивает ее хранение до следующего сеанса связи, а также организует обмен информацией в режиме интервального регулирования.
- модуль вычислителя системы автоматического управления торможением 15 ВС-САУТ предназначен для расчета программных скоростей для прицельного торможения с учетом профиля, коэффициента сцепления, определение расстояния до светофора из расчета длин 2-х блок-участков, выдачи команд на исполнительные устройства, для контроля скорости с учетом текущих ограничений, производит организацию и контроль работоспособности устройств по дополнительному цифровому интерфейсу RS-485;
- модуль 11 контроллера телемеханической системы контроля бодрствования машиниста ТСКБМ-К предназначен для обработки информации о физиологических параметрах машиниста, формирования во внутренний CAN-интерфейс информации о необходимости дополнительной проверки работоспособности машиниста, информации о работоспособности машиниста;
- фильтр 19 Ф, который выполняет функции защиты входных дискретных сигналов от воздействия перенапряжения и импульсных помех;
- фильтр 16 Ф, который выполняет функции защиты входных интерфейсных цепей (CAN, RS-485, внешних цифровых линий связи) от воздействия перенапряжения и импульсных помех;
- модуль 12 входных дискретных сигналов ВДС предназначен для обработки дискретных сигналов, поступающих на входы модулей и передачи состояния входов по CAN-интерфейсу в виде сообщений;
- модуль 13 вывода сигналов предназначен для коммутации выходных цепей по командам, поступающим по CAN-интерфейсу, и имеет встроенную защиту по току от короткого замыкания коммутируемых цепей.
На чертеже представлена структурная схема комплексного устройства контроля безопасности движения поезда.
Комплексное устройство контроля безопасности движения поезда содержит соединенные между собой модули 7, 8 схемы контроля безопасности, двухканальные модули 9, 10 центральной обработки, подключенные к внутреннему CAN интерфейсу, усилители 17, 18, соединенные с электропневматическим клапаном 20, при этом дополнительные входы/выходы модулей 9, 10 центральной обработки соединены с входами/выходами соответственно первого и второго модулей 7, 8 контроля безопасности, входы/выходы которых соединены с усилителями электропневматического клапана 20, к внутреннему CAN интерфейсу подключены модуль 1 спутниковой навигационной системы с электронной картой, вход которого соединен с совмещенной антенной 21, модуль 15 вычислителя системы автоматического управления торможением, второй порт которого подключен к дополнительному цифровому интерфейсу RS-485 через фильтр, предназначенный для подключения устройства к линиям связи, модуль 11 контроллера телемеханической системы контроля бодрствования машиниста, модуль 14 шлюз-CAN, дополнительные порты которого соединены с внешним CAN интерфейсом и радиомодемом 5, второй порт которого через дуплексный фильтр 6 соединен с радиоантенной 22, модуль 12 входных дискретных сигналов, вход которого через фильтр 19 подключен к источнику 23 дискретных сигналов, модуль 13 вывода сигналов, выход которого подключен к исполнительным устройствам 24, к внешнему CAN интерфейсу подключены приемопередающий модуль 4 TETRA и приемопередающий модуль 2 GSM/GSM-R, причем их порты через диплексер 3 подключены к совмещенной антенне 21.
Комплексное устройство контроля безопасности движения поезда работает следующим образом.
Устройство начинает работать сразу после включения питания. Модули 9, 10 ЦО проводят опрос всех модулей, подключенных к внутреннему CAN интерфейсу, для принятия решения о работоспособности модулей. В случае принятия решения о не работоспособности какого-либо модуля он будет автоматически перезапущен.
Информация о значениях давления, по внешнему CAN интерфейсу через фильтр 16 поступает на модуль 14 шлюз-CAN для преобразования, далее передается в модули 9, 10 ЦО и модуль 15 ВС-САУТ для реализации заданных режимов работы, а именно:
- выполнения принудительного автостопного торможения;
- выполнения прицельного служебного торможения;
- защиты от несанкционированного отключения ключа ЭПК.
Информация о показаниях локомотивного светофора, значения целевой, предельно допустимой скоростей движения поезда на данном блок-участке поступают по внутреннему CAN интерфейсу через фильтр 16 в модуль 15 ВС-САУТ и в модули 9, 10 ЦО для принятия окончательного решения о допустимой и целевой скоростях движения на данном блок-участке.
Информация о состоянии путевых генераторов САУТ (на чертеже не показаны), скорости поезда, ускорения и данных о пройденном пути по дополнительному цифровому интерфейсу RS 485 через фильтр 16 поступает в модуль 15 ВС САУТ для расчета длин блок-участков, допустимой скорости движения на данном блок-участке и расчета данных для прицельного торможения.
На основании принятых данных от Глобальной навигационной спутниковой системы (ГЛОНАСС) и Global Positioning System (GPS) через совмещенную антенну 21, и данных электронной карты, записанной в модуль 1 ЭК-СНС, определяется местоположение поезда, расстояние до впереди лежащего объекта и ограничение скорости проследования данного объекта.
Сигналы от антенны 22 через дуплексный фильтр 6 и радиомодем 5 поступают в модуль 14 шлюз-CAN, где из них формируются данные об ограничениях движения на текущем участке пути, которые передаются в модули 9, 10 ЦО для дальнейшей обработки.
От модуля 14 шлюз-CAN по радиоканалу на базовую станцию поступают данные о параметрах движения поезда (номер пути, номер поезда, число вагонов, координата поезда, значения допустимой, целевой и фактической скоростей).
Приемопередающий модуль 4 TETRA и приемопередающий модуль 2 радиоканала GSM, в зависимости от наличия вещания в этих диапазонах через диплексер 3 и совмещенную 21 антенну обеспечивают дуплексную передачу данных для дополнительных технологических приложений (АСУ, диагностика и т.д.), информацию о номере, длине, местоположении, скорости следования поезда, а также информации об исправности комплекса и об общем пробеге локомотива.
Модули 9, 10 ЦО на основании принятых данных о значениях допустимой и целевой скоростей на текущем блок-участке и формируют окончательное решение о значениях данных скоростей, а также на основании данных, хранящихся в их энергонезависимой памяти, модули 9, 10 ЦО формируют кривую снижения значений скоростей для различных категорий поездов (скоростной, пассажирский, грузовой) при подъезде к запрещающему сигналу светофора, при подъезде к железнодорожному объекту (платформа, станция, стрелка, переезд и т.д.), в зависимости от поездной ситуации, команду экстренного или служебного торможения в случаях превышения допустимой скорости.
Модули 9, 10 ЦО принимают решение о разрешении проезда запрещающего сигнала светофора по команде, полученной модулем 14 шлюз-CAN от радиомодема 5.
Модули 9, 10 ЦО формируют для приемопередающих модулей 4 TETRA и 2 GSM данные для дополнительных технологических приложений (АСУ, диагностика и т.д.), информацию о номере, длине, местоположении, скорости следования поезда, а также информацию об исправности комплекса и об общем пробеге локомотива.
Модули 9, 10 ЦО при несанкционированном отключении ключа электропневматического клапана 20 формируют для модуля 15 ВС-САУТ команду для управления исполнительным устройством 24.
Модуль 15 ВС-САУТ рассчитывает и производит контроль прицельного торможения на основании полученных данных, принимает решение о применении прицельного торможения и формирует команду на разбор тяги.
Модуль 13 вывода сигналов включает исполнительные устройства 24 по команде от модуля 15 ВС-САУТ.
При получении от базовой станции по радиоканалу команды о принудительном торможении, модули 9, 10 ЦО формируют команду на выполнение принудительного торможения и передают ее в модуль 15 ВС-САУТ, который формирует данные для модуля 13 вывода сигналов, который своими выходами воздействует на исполнительные устройства 24.
Модуль 12 ВДС, через 19 фильтр, получает дискретные сигналы о состоянии подключенного оборудования, осуществляет первичную цифровую обработку и передает их по внутреннему CAN интерфейсу для дальнейшей обработки в модули 9, 10 ЦО.
Модуль 14 шлюз-CAN проводит цифровую обработку данных, принятых через фильтр 16 из внешнего CAN интерфейса, и передает их по внутреннему CAN интерфейсу в модули 9, 10 ЦО.
Модуль 11 ТСКБМ-К, на основании данных о физиологическом состоянии машиниста, полученных по внутреннему CAN-интерфейсу, формирует для модулей 9, 10 ЦО данные для проведения дополнительных проверок бдительности машиниста.
Комплексное устройство контроля безопасности движения поезда, содержащее соединенные между собой объединительной платой модули схемы контроля безопасности, двухканальные модули центральной обработки, подключенные к внутреннему CAN интерфейсу, усилители, соединенные с электропневматическим клапаном, при этом дополнительные входы/выходы модулей центральной обработки соединены с входами/выходами соответственно первого и второго модулей схемы контроля безопасности, входы/выходы которых соединены с усилителями электропневматического клапана, отличающееся тем, что в устройство введены и подключены к внутреннему CAN интерфейсу модуль спутниковой навигационной системы с электронной картой, вход которого соединен с совмещенной антенной, модуль вычислителя системы автоматического управления торможением, второй порт которого подключен к дополнительному цифровому интерфейсу RS-485 через фильтр, предназначенный для подключения устройства к линиям связи, модуль контроллера телемеханической системы контроля бодрствования машиниста, модуль шлюз - CAN, дополнительные порты которого соединены с внешним CAN интерфейсом и радиомодемом, второй порт которого через дуплексный фильтр соединен с радиоантенной, модуль входных дискретных сигналов, вход которого через фильтр подключен к источнику дискретных сигналов, модуль вывода сигналов, выход которого подключен к исполнительным устройствам, к внешнему CAN интерфейсу подключены приемопередающий модуль TETRA и приемопередающий модуль GSM/GSM-R, причем их порты через диплексер подключены к совмещенной антенне.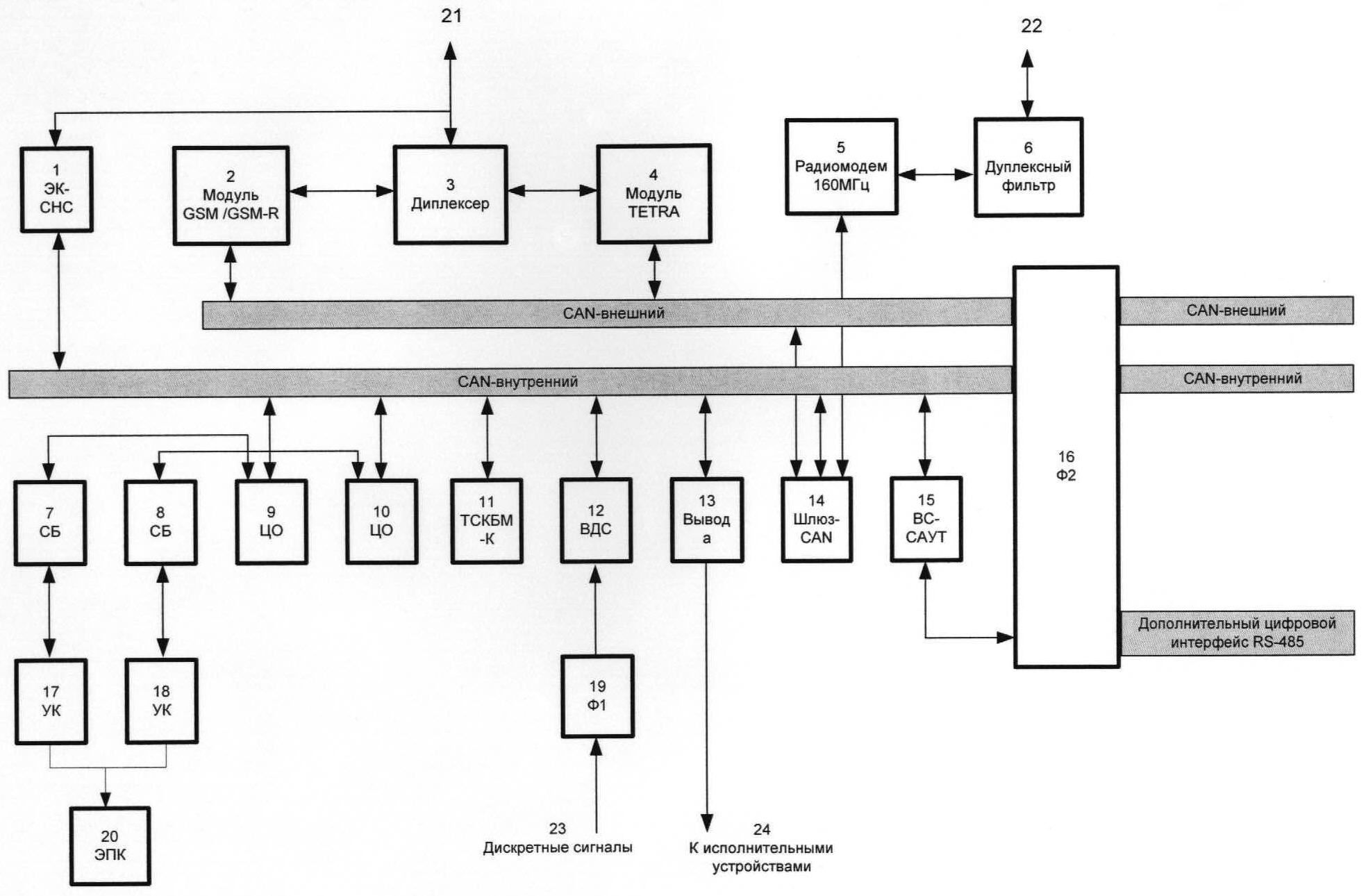
Программно-аппаратный комплекс для обмена данными автоматизированных систем
Способ разнофазного управления выпрямительно-инверторными преобразователями электровоза переменного тока
Система контроля и оповещения о приближении подвижного состава
Модуль генератора комплексного сигнала для локомотивной сигнализации
Способ автоматического расцепления автосцепок движущихся вагонов и устройство его осуществления
Способ и система автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по длине состава локомотивами
Процедурный тренажер для обучения машиниста работе с тормозной системой подвижного состава
Способ оптимизации режимов контактной сварки рельсов
Способ постановки железнодорожного пути в проектное положение по высотным отметкам и устройство для его осуществления
Кран вспомогательного тормоза локомотива
Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне
Адаптивный приемник сигналов автоматической локомотивной сигнализации
Система автоблокировки с тональными рельсовыми цепями
Устройство для управления движением поезда

