Результат интеллектуальной деятельности: КОМБИНИРОВАННАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С НАБЛЮДАТЕЛЕМ
Вид РИД
Изобретение
Изобретение относится к технической кибернетике и может быть использовано при автоматическом управлении нестационарными скалярными априорно неопределенными динамическими объектами циклического действия.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления для динамических объектов с периодическими коэффициентами и наблюдателем (Патент РФ №2429516, Официальный бюл. «Изобретения. Полезные модели». - 2011, №26, прототип), содержащая наблюдатель состояния, блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, последовательно соединенные второй умножитель и объект регулирования, выход которого соединен со вторым входом наблюдателя состояния, входы блока задания коэффициентов соединены с соответствующими выходами наблюдателя состояния, входы первого блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход первого блока суммирования соединен с первым и вторым входами первого умножителя и вторым входом второго умножителя, первый вход второго блока суммирования подключен к выходу первого умножителя, второй вход - к выходу блока задержки, выход второго блока суммирования связан с первым входом второго умножителя и с входом блока задержки, выход второго умножителя подключен к входу объекта регулирования и к первому входу наблюдателя состояния.
Однако недостатком данной системы является потеря работоспособности в случае управления априорно неопределенными неустойчивыми динамическими объектами.
Технической задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей системы, т.е. обеспечение работоспособности и асимптотической устойчивости при управлении априорно неопределенными неустойчивыми динамическими объектами периодического действия.
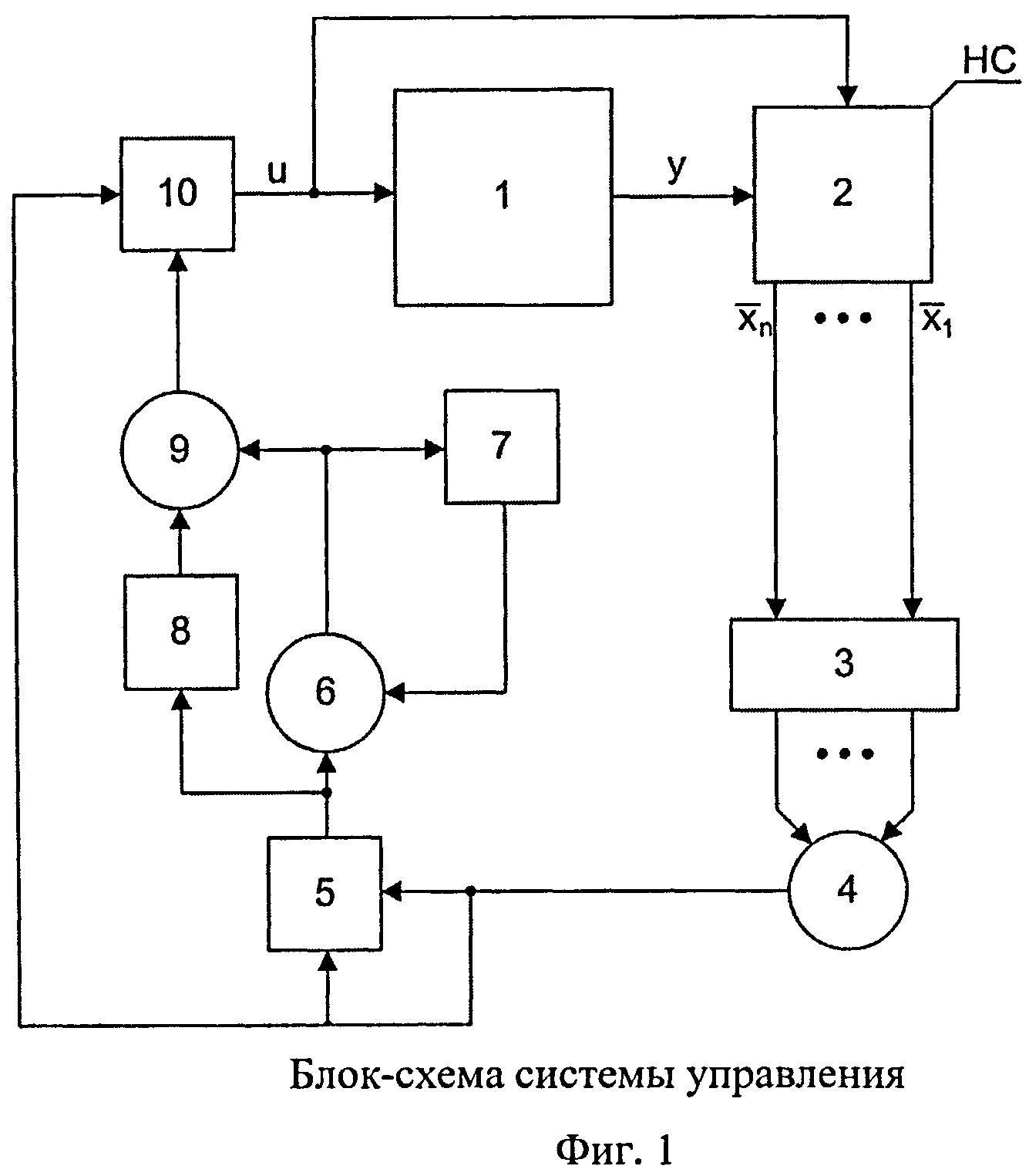
Решение поставленной задачи достигается за счет того, что в систему, содержащую наблюдатель состояния, блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, последовательно соединенные второй умножитель и объект регулирования, согласно изобретению, дополнительно введен интегратор и третий блок суммирования, при этом выход объекта регулирования соединен со вторым входом наблюдателя состояния, выходы которого подключены к соответствующим входам блока задания коэффициентов, входы первого блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход первого блока суммирования связан с обоими входами первого умножителя, а также вторым входом второго умножителя, первый вход второго блока суммирования подключен к выходу первого умножителя, второй вход связан с выходом блока задержки, выход второго блока суммирования соединен со вторым входом третьего блока суммирования и входом блока задержки, первый вход третьего блока суммирования подключен к выходу интегратора, вход которого соединен с выходом первого умножителя, выход третьего блока суммирования подключен к первому входу второго умножителя, выход второго умножителя подключен к входу объекта регулирования и к первому входу наблюдателя состояния.
За счет введения интегратора и третьего блока суммирования обеспечивается асимптотическая устойчивость системы при управлении априорно неопределенными неустойчивыми объектами в периодических режимах.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена блок-схема системы; фиг.2 иллюстрирует блок-схему наблюдателя состояния. Система содержит объект регулирования 1, наблюдатель состояния 2, блок задания коэффициентов 3, первый блок суммирования 4, первый умножитель 5, второй блок суммирования 6, блок задержки 7, интегратор 8, третий блок суммирования 9, второй умножитель 10, y, u - соответственно скалярный выход и управляющее воздействие объекта регулирования,  - значения внутренних состояний объекта регулирования (производных скалярного выхода y).
- значения внутренних состояний объекта регулирования (производных скалярного выхода y).
Объект регулирования описывается уравнением

Уравнения динамики стационарного НС имеют вид

Здесь x(t) - n-мерный вектор состояний объекта регулирования;
 - n-мерный вектор состояния наблюдателя, соответствующий оценкам недоступных переменных состояния x(t);
- n-мерный вектор состояния наблюдателя, соответствующий оценкам недоступных переменных состояния x(t);
A(t+Т), b(t+Т) - соответственно нестационарные матрица состояния (неустойчивая) и вектор управления, с Т-периодически меняющимися коэффициентами;
 - матрица состояния наблюдателя;
- матрица состояния наблюдателя;
А0 - гурвицева матрица;
N - матрица наблюдения;
y(t) - скалярное значение выхода объекта регулирования;
* - символ транспонирования;
 , L*=(1,0,…,0) - стационарные векторы;
, L*=(1,0,…,0) - стационарные векторы;
u(t) - скалярное управляющее воздействие, удовлетворяющее соотношению:

где χпер(t) - настраиваемый коэффициент контура управления;
χроб(t) - робастная часть регулятора (3)
 - некоторый n-мерный вектор блока задания коэффициентов 3, такой что полином
- некоторый n-мерный вектор блока задания коэффициентов 3, такой что полином  - Гурвицев;
- Гурвицев;
s - комплексная переменная.
Используя критерий гиперустойчивости В.М.Попова, можно показать, что асимптотическая устойчивость в рассматриваемой системе управления обеспечивается за счет реализации алгоритмов контура (3) в виде:


где γ0, γ1=const>0.
Система функционирует следующим образом.
Сигнал y с выхода объекта регулирования 1 поступает на второй вход наблюдателя состояния 2 (структурная схема представлена на фиг.2), на первый вход которого поступает сигнал управления u. Сигнал со второго входа наблюдателя состояния 2 идет на второй вход блока сравнения 13, на первый вход которого подается выходной сигнал интегратора 121. Внутри блока сравнения 13 вычисляется разность подаваемых на него сигналов. Сигнал u с первого входа наблюдателя состояния 2 подается на первый вход блока суммирования 11n (n - размерность вектора состояния объекта регулирования 1), на второй вход блока суммирования 11n поступает выходной сигнал блока сравнений 13 с соответствующим коэффициентом. На остальные n входов блока суммирования 11n идут сигналы с выходов интеграторов 12i (i=n, n-1, …, 1) с соответствующими коэффициентами. Выходные сигналы интеграторов 12i, соответствующие оценкам недоступных переменных состояния  , поступают, во-первых, на соответствующие выходы наблюдателя состояния 2 и, во-вторых, на первые входы блоков суммирования 11j (j=n-1, …, 1). На вторые входы блоков суммирования 11j идут сигналы с выхода блока сравнения 13 с соответствующими коэффициентами. Сигналы с выходов наблюдателя состояния 2 поступают на соответствующие входы блока задания коэффициентов 3, внутри которого происходит умножение сигнала с i-го входа на постоянный коэффициент. Выходные сигналы блока задания коэффициентов 3 поступают на входы первого блока суммирования 4, где складываются. Сигнал с выхода первого блока суммирования 4 идет на оба входа первого умножителя 5 и на второй вход второго умножителя 10. На первый вход второго блока суммирования 6 с соответствующим коэффициентом поступает сигнал с выхода первого умножителя 5, на второй вход второго блока суммирования 6 идет сигнал с выхода блока задержки 7. Выходной сигнал второго блока суммирования 6 подается на второй вход третьего блока суммирования 9 и на вход блока задержки 7. На первый вход третьего блока суммирования 9 с соответствующим коэффициентом поступает сигнал с выхода интегратора 8, на вход которого подается сигнал с выхода первого умножителя 5. Выходной сигнал третьего блока суммирования 9 идет на первый вход второго умножителя 10. Сигнал с выхода второго умножителя 10, соответствующий сигналу скалярного управляющего воздействия u поступает на вход объекта регулирования 1, а также на первый вход наблюдателя состояния 2.
, поступают, во-первых, на соответствующие выходы наблюдателя состояния 2 и, во-вторых, на первые входы блоков суммирования 11j (j=n-1, …, 1). На вторые входы блоков суммирования 11j идут сигналы с выхода блока сравнения 13 с соответствующими коэффициентами. Сигналы с выходов наблюдателя состояния 2 поступают на соответствующие входы блока задания коэффициентов 3, внутри которого происходит умножение сигнала с i-го входа на постоянный коэффициент. Выходные сигналы блока задания коэффициентов 3 поступают на входы первого блока суммирования 4, где складываются. Сигнал с выхода первого блока суммирования 4 идет на оба входа первого умножителя 5 и на второй вход второго умножителя 10. На первый вход второго блока суммирования 6 с соответствующим коэффициентом поступает сигнал с выхода первого умножителя 5, на второй вход второго блока суммирования 6 идет сигнал с выхода блока задержки 7. Выходной сигнал второго блока суммирования 6 подается на второй вход третьего блока суммирования 9 и на вход блока задержки 7. На первый вход третьего блока суммирования 9 с соответствующим коэффициентом поступает сигнал с выхода интегратора 8, на вход которого подается сигнал с выхода первого умножителя 5. Выходной сигнал третьего блока суммирования 9 идет на первый вход второго умножителя 10. Сигнал с выхода второго умножителя 10, соответствующий сигналу скалярного управляющего воздействия u поступает на вход объекта регулирования 1, а также на первый вход наблюдателя состояния 2.
Технический результат заключается в расширении функциональных возможностей системы, а именно - обеспечении ее работоспособности и асимптотической устойчивости при управлении периодическими режимами априорно неопределенных неустойчивых динамических объектов.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Комбинированная адаптивная система управления для нестационарных динамических объектов с наблюдателем, содержащая наблюдатель состояния, блок задания коэффициентов, первый и второй блоки суммирования, первый и второй умножители, блок задержки, объект регулирования, выход которого соединен со вторым входом наблюдателя состояния, выходы которого подключены к соответствующим входам блока задания коэффициентов, входы первого блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход первого блока суммирования связан с обоими входами первого умножителя, а также вторым входом второго умножителя, отличающаяся тем, что дополнительно введены интегратор и третий блок суммирования, при этом первый вход второго блока суммирования подключен к выходу первого умножителя, второй вход связан с выходом блока задержки, выход второго блока суммирования соединен со вторым входом третьего блока суммирования и входом блока задержки, первый вход третьего блока суммирования подключен к выходу интегратора, вход которого соединен с выходом первого умножителя, выход третьего блока суммирования подключен к первому входу второго умножителя, выход второго умножителя подключен к входу объекта регулирования и к первому входу наблюдателя состояния.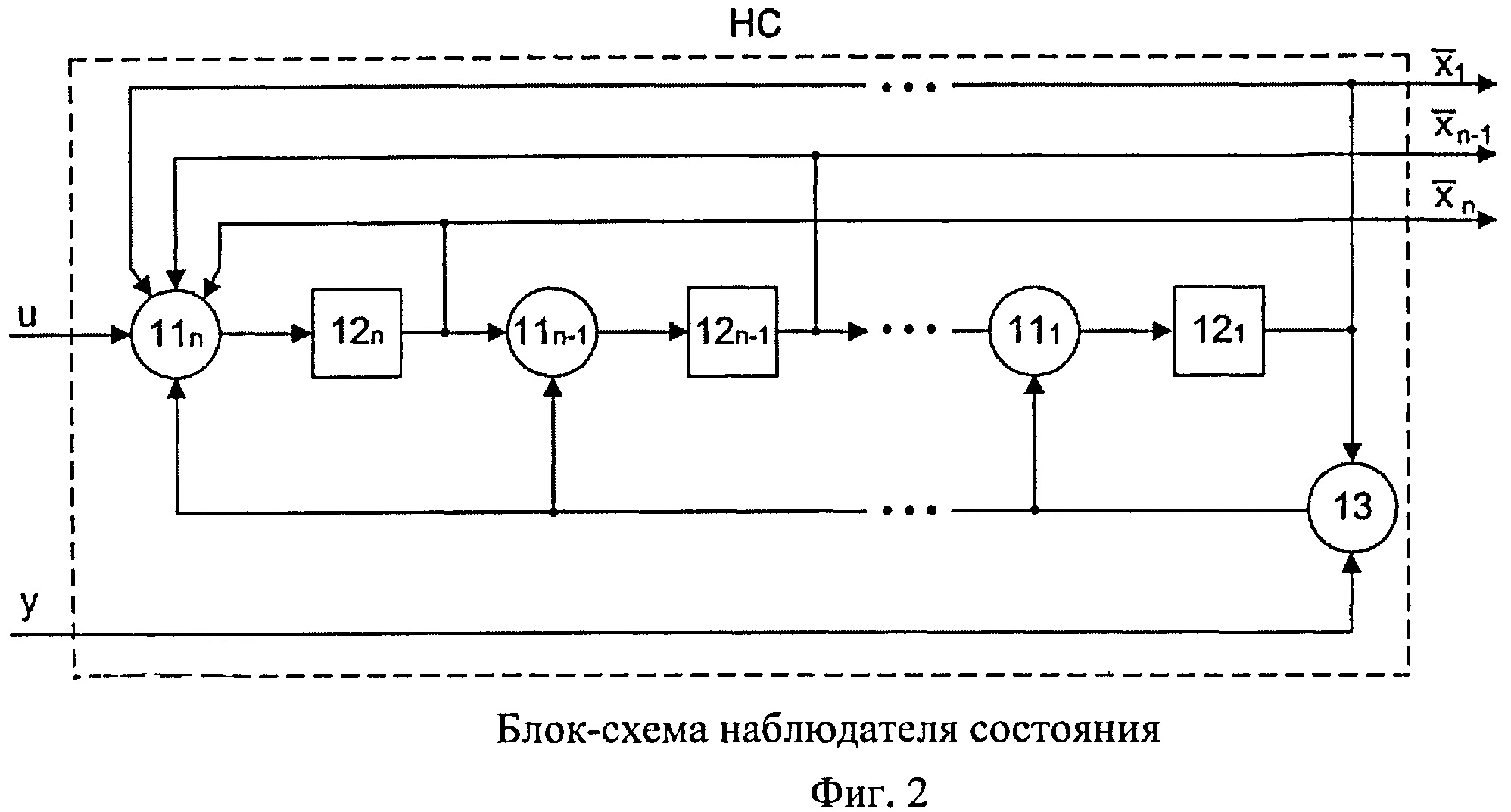
Комбинированная робастная система управления для нестационарных динамических объектов
Адаптивная система управления для априорно неопределенных объектов с самонастройкой динамического корректора
Комбинированная робастная система управления для априорно неопределенных динамических объектов периодического действия с наблюдателем
Адаптивно-робастная система управления для априорно неопределенных нестационарных динамических объектов
Адаптивная система управления с наблюдателем переменных состояния для объекта с запаздываниями
Этинолеперлитобетон
Способ поиска неисправных блоков в непрерывной динамической системе
Траверса для лесоматериалов
Модификатор
Лигатура
Смеситель
Засыпная забойка взрывных скважин с элементами каменного материала
Способ обработки заготовок из капролона
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Комбинированная робастная система управления для априорно неопределенных динамических объектов периодического действия с наблюдателем

