Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области нелинейной радиолокации и предназначено для дистанционного обнаружения и точного измерения координат управляемых взрывных устройств (УВУ), обладающих избирательными свойствами в частотном диапазоне электромагнитных волн.
Актуальность разработки такого способа и создания соответствующего устройства обусловлена широким распространением во всем мире «взрывного» терроризма.
Одним из наиболее перспективных способов обнаружения УВУ является метод нелинейной радиолокации. Основные результаты исследований по оценке возможности использования нелинейной локации для обнаружения инженерных мин и взрывных устройств в различных укрывающих средах обобщены и опубликованы в ряде отечественных работ [1-4]. Реализация этих работ завершилась созданием в промышленности переносного нелинейного радиолокатора ИНМ (искатель неконтактных мин) [5].
Принцип действия нелинейного радиолокатора (НРЛ) заключается в том, что при облучении внешним сигналом электронные устройства, содержащие полупроводниковые элементы (диоды, транзисторы, микросхемы), переизлучают сигналы на высших гармониках зондирующего сигнала, которые затем принимаются и анализируются НРЛ [6].
Обычно в существующих НРЛ режим облучения производится простыми (узкополосными) зондирующими сигналами (ЗС), база которых D=Δf·T~1, где Δf - ширина спектра ЗС, Т - длительность ЗС. Существует большое количество поисковых нелинейных локаторов дециметрового диапазона волн, использующих простые сигналы в качестве ЗС, которые решают задачи поиска электронных закладок в помещениях [7, 8].
Поисковые локаторы относятся к классу средств ближней локации, и применение в них сигналов с малой базой ограничивает пространственный элемент разрешения и затрудняет измерение координат положения объектов поиска при их дистанционном обнаружении на плоскости (x, у). Измерение координат в поисковых локаторах осуществляется путем изменения амплитуды зондирующих сигналов и чувствительности устройств приема отраженных колебаний высших гармоник [7, 8]. Данные операции выполняются последовательно во времени и поэтому требуют значительной длительности анализа. Поисковые локаторы характеризуются малыми дальностью обнаружения и разрешающей способностью, большим временем анализа отраженных сигналов, что в ряде случаев ограничивает область их применения в практических приложениях, а при обнаружении УВУ на расстояниях менее 1 м приводит к неоправданному риску оператора.
С целью обеспечения безопасности личного состава необходимо реализовать дистанционное обнаружение взрывоопасных объектов и практически мгновенное точное их позиционирование на местности.
Следует отметить, что для поставленных задач в нелинейной локации делались попытки улучшить разрешение и точностные характеристики по дальности за счет применения сложных сигналов с базой D>>1.
Известно, что в обычной линейной локации применение сложных сигналов позволило разрешить противоречие между энергетическим потенциалом и разрешающей способностью по дальности [7].
В нелинейной локации применение сложных сигналов имеет свои особенности, определяемые нелинейным преобразователем в объектах поиска. В частности, применение бифазных кодов при выделении колебаний 2-й гармоники приводит к эффекту обужения спектра колебаний, отраженных от УВУ, т.е. к ухудшению, а не улучшению, разрешающей способности и точности измерения дальности [8].
Не изменяет ситуации и применение сложных сигналов типа линейно-частотно модулированных колебаний (ЛЧМ сигналы) в качестве зондирующих сигналов. Фактически ЛЧМ сигнал в каждый момент времени представляет собой узкополосный сигнал, который на конечном временном интервале в пределах огибающей ЛЧМ сигнала попадает в полосу пропускания УВУ. В результате чего разрешающая способность и точность измерения дальности определяется не параметрами зондирующего сигнала, а параметрами нелинейного элемента (НЭ) в УВУ.
Таким образом, простое увеличение базы зондирующего сигнала в случае нелинейной локации не приводит к улучшению разрешающей способности по дальности, и выбор типа модуляции зондирующего сигнала с целью улучшения разрешения для нелинейного локатора весьма актуален.
Техническим результатом изобретения является обеспечение безопасного дистанционного обнаружения УВУ с высокой разрешающей способностью по дальности, их мгновенным и точным позиционированием на местности, что достигается созданием обзорного НРЛ, который на большой дальности обнаруживает и измеряет координаты УВУ независимо в каждом элементе разрешения по дальности.
Проведенный поиск не выявил описания способа и устройства, близкого к заявленным, поэтому прототип предлагаемого изобретения отсутствует.
Увеличение дальности обнаружения в предлагаемом изобретении обеспечивается за счет резонансного возбуждения объектов поиска и использования параметрических эффектов, которые возникают в нелинейных элементах УВУ при облучении их мощным электромагнитным полем, а измерение их местоположения обеспечивается применением сложных многодиапазонных широкополосных зондирующих сигналов с большой базой, для улучшения разрешающей способности по дальности, и реализацией моноимпульсных методов измерения угловых направлений с помощью дискретного набора многодиапазонных передающих и приемных антенн.
Следует отметить, что в обзорном нелинейном локаторе дистанционного обнаружения локатор должен выполнять обнаружение УВУ независимо от их частотного диапазона и измерение дальности и угловых направлений в заданной зоне обнаружения, то есть фактически обработка принимаемых колебаний в обзорном НРЛ должна быть, по крайней мере, двумерной.
Кроме того, следует учитывать, что специфические области применения НРЛ накладывают ограничения на его массогабаритные характеристики, которые должны быть приемлемыми для установки на любое транспортное средство, в том числе быть пригодными для ручного применения.
С учетом перечисленных ограничений наиболее целесообразно для реализации обзорного НРЛ применить методы моноимпульсной локации [9], которые позволяют выполнять практически мгновенный обзор заданной зоны пространства, используя ограниченное число многодиапазонных антенн, допускающих излучение и прием многодиапазонного широкополосного сигнала. Ограниченное число антенн минимизирует массогабаритные характеристики обзорного НРЛ.
Время обзора заданной зоны пространства в принципе не может быть мгновенным и определяется временем накопления (усреднения) принимаемых колебаний, т.е. временем фильтрации принимаемых сигналов на фоне шума и внешних помех, которое, как правило, не имеет практического значения в реальных условиях при принятии решений по результатам обнаружения УВУ, и в этом смысле осуществляется практически мгновенно в реальном масштабе времени. Время обзора по частотному диапазону УВУ также должно быть мгновенным, что обеспечивается применением многодиапазонных широкополосных зондирующих сигналов, которые обеспечивают «подсветку» и обнаружение УВУ во всем частотном диапазоне их функционирования и, таким образом, обеспечивают двумерность обработки.
Такой подход позволяет исключить операции последовательного сканирования по угловым и частотным параметрам и реализовать беспоисковые методы обнаружения, что существенно сократит время обзора заданной зоны. Основой беспоисковых двумерных методов обнаружения (по пространству и частоте) является применение многодиапазонных широкополосных зондирующих сигналов, ширина спектра которых должна перекрывать весь частотный диапазон функционирования УВУ.
Типовой частотный диапазон УВУ соответствует частотному диапазону связных радиостанций, которые часто используются в качестве каналов радиоуправления, и занимает полосу частот от 30 МГц до 3000 МГц.
В обзорном НРЛ при беспоисковом по частоте методе обнаружения откликов УВУ на высших гармониках многодиапазонный зондирующий сигнал НРЛ должен иметь дискретную структуру по частоте. Дискретная структура по частоте многодиапазонного зондирующего сигнала необходима для обеспечения чувствительности приема откликов УВУ на высших гармониках, которые должны обнаруживаться на фоне собственного шума приемных устройств НРЛ, т.е. в этом частотном диапазоне спектральные составляющие многодиапазонного зондирующего сигнала строго должны быть равны нулю.
С другой стороны, спектр зондирующих сигналов должен занимать непрерывную полосу частот для выполнения условия резонансного возбуждения приемных каналов УВУ во всем их частотном диапазоне. С учетом параметрических эффектов, возникающих в нелинейных элементах УВУ [6], компромиссным решением для обеспечения оптимальной структуры зондирующих сигналов в частотной области является излучение непрерывного спектра в дискретных зонах.
Ширина спектра каждой из дискретных зон соизмерима с их центральной частотой. Расстановка центральных частот дискретных зон широкополосных сигналов соизмерима с их шириной спектра. Сигналы, излученные в таких дискретных зонах, относятся к классу многодиапазонных широкополосных сигналов.
Ширина спектра дискретных зон широкополосного многодиапазонного сигнала определяется выражением
где m - номер высшей гармоники,
n - порядковый номер дискретной зоны многодиапазонного сигнала,
ω0 - наименьшая граничная частота частотного диапазона УВУ.
В практических применениях наибольшую значимость имеет вторая гармоника ЗС в отраженном сигнале. Поэтому рассмотрим структуру многодиапазонного ЗС, предназначенную для обнаружения откликов УВУ на второй гармонике.
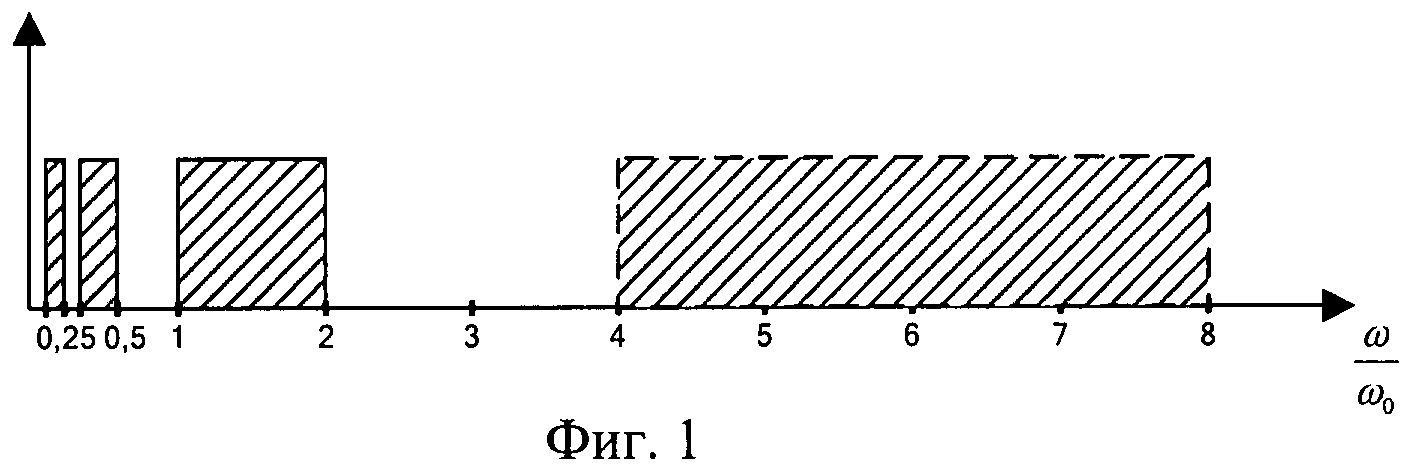
Для обнаружения отраженных сигналов на 2-й гармонике спектр зондирующих сигналов в каждой из дискретных зон должен иметь октавную структуру. Число октавных зон, которые перекрывают частотный диапазон имеющихся и перспективных УВУ, не превышает величины 3÷4. Характерный вид ЗС в спектральной области представлен на фиг.1.
Когерентная фильтрация широкополосных сложных зондирующих сигналов в каждой n дискретной зоне позволяет локализовать местоположение разных УВУ по дальности с элементом разрешения ~4÷5 м, начиная с дискретной октавной зоны, граница которой начинается с 30 МГц. Реализация такого элемента разрешения соизмерима с пространственным шагом типовой установки мин на плоскости x, y. Данное обстоятельство является достаточным условием применения методов моноимпульсной локации для точного определения местоположения УВУ во всем возможном их частотном диапазоне. Действительно, методы измерения в моноимпульсной локации основаны на предположении, что объект обнаружения локализован в пространстве и не превышает элемента разрешения по дальности [9].
Для формирования необходимого элемента разрешения по дальности основополагающим является применение в НРЛ зондирующего сигнала в виде широкополосного шума с равномерной спектральной плотностью в каждой из n зон. Ограничение по ширине спектра каждой дискретной зоны является необходимым условием для выделения на фоне основной гармоники гармоник высшего порядка.
Следует отметить, что при облучении НЭ ЗС в нем возникают вынужденные колебания. В случае, когда резонансный контур УВУ совпадает со спектром дискретных зон ЗС, во входном контуре УВУ возникают резонансные колебания, амплитуда которых нарастает по линейному закону. Резонансные колебания также возникают и на кратных гармониках. Для возбуждения резонансных колебаний на кратных гармониках требуется вводить в контур внешний сигнал с большей энергией. Требуемое увеличение энергии минимально для гармоник с наименьшей кратностью, например для второй гармоники.
Возникновение резонансных колебаний во входном контуре УВУ приводит при достаточно больших их амплитудах к модуляции по периодическому закону входного сопротивления приемника УВУ. В результате входной контур УВУ превращается в контур с переменными параметрами и начинает работать как параметрический усилитель, что приводит к усилению отклика отраженного от НЭ зондирующего сигнала и расширению полосы пропускания контура УВУ [10]. Усиление отклика возникает за счет использования энергии внешнего ЗС либо энергии источника питания НЭ.
Расширение полосы пропускания контура УВУ происходит не только на основной гармонике, но также, по крайней мере, на наборе гармонических составляющих  , где K=1, 2, 3, ... - целое число.
, где K=1, 2, 3, ... - целое число.
Набор данных частот описывает резонансные колебания в колебательной системе, параметры которой меняются по синусоидальному закону. Эти резонансные колебания называются «обобщенным» резонансом [11].
Объединяя условия «обобщенного» резонанса с дискретностью излучения зондирующих сигналов, получим, что каждая из n зон зондирующего сигнала возбуждает набор гармонических составляющих K=2·m-n. Наибольший интерес представляют зоны, которые примыкают к n дискретной зоне зондирующего сигнала, т.к. в этих зонах требуется наименьшая энергия для возбуждения параметрического усиления входных колебаний. В случае возбуждения 2-й гармоники это соответствует появлению колебаний на частоте 2ω0 и частоте субгармоники 
Наличие обобщенного резонанса обосновывает достаточность структуры многодиапазонного зондирующего сигнала, состоящего из набора дискретных зон для обнаружения НЭ во всем ожидаемом диапазоне электромагнитных волн. Следует отметить, что при достаточно большой импульсной мощности излучения требования по количеству дискретных зон в частотной области многодиапазонного зондирующего сигнала уменьшаются.
Рассмотренный механизм колебаний в НЭ, обусловленный применением широкополосных зондирующих сигналов, в значительной мере определяет энергетический потенциал локатора.
Возникновение окна «прозрачности» на частоте 2ω0 благодаря наличию обобщенного резонанса обусловливает прохождение колебаний на второй гармонике практически без ослабления во входных цепях УВУ.
В общем случае дальность действия НРЛ определяется соответствующим для нелинейной радиолокации уравнением дальности. При условии возбуждения параметрических колебаний в НЭ происходит увеличение дальности обнаружения, по сравнению с нерезонансным (непараметрическим) возбуждением отклика. Увеличение дальности обнаружения происходит за счет параметрического усиления отклика на основной гармонике и возникновения окна «прозрачности» на высших гармониках, например второй, и составляет величину порядка 10÷30 раз по сравнению с нерезонансным возбуждением НЭ.
Рассмотрим подробнее процедуру обнаружения и измерения координат в НРЛ. Основным фактором, отличающим НРЛ от классической линейной радиолокации, является наличие нелинейных преобразований ЗС в НЭ, которое приводит к возникновению высших гармоник.
Возникновение гармонических колебаний на частоте 2ω0 может быть вызвано двумя явлениями. Одним из них является собственно нелинейное преобразование колебаний в нелинейных элементах УВУ, а другим - преобразование (гетеродинирование) принимаемых колебаний в УВУ на частоту 2ω0, за счет их умножения на переменную во времени проводимость контура УВУ. Оба этих механизма приводят к возникновению постоянной составляющей в цепях входного контура УВУ с нелинейным элементом, что приводит к смещению его рабочей точки и, соответственно, к увеличению нелинейных искажений зондирующего сигнала.
Вынужденный режим параметрического усиления в УВУ с резонансным колебательным контуром относится к классу невырожденных параметрических усилителей. В невырожденном параметрическом усилителе квадратичный нелинейный элемент особенно важен для практики, потому что он в отличие от более высоких степеней приводит к усилению без искажений [12].
Данное обстоятельство позволяет реализовать взаимно корреляционную обработку сигналов, отраженных на 2-й гармонике от нелинейных элементов УВУ и зондирующего сигнала передатчика, предварительно подвергнутого нелинейному квадратичному преобразованию. Минимизацию возникающих искажений в структуре сложного сигнала при нелинейном преобразовании можно обеспечить выбором вида модуляции зондирующего сигнала. Очевидно, что мгновенный спектр такого зондирующего сигнала должен быть широкополосным, а параметр модуляции определятся времяпозиционным кодированием. Данным условиям удовлетворяет белый гауссов шум с ограниченной полосой пропускания (для второй гармоники ширина спектра зондирующего сигнала равна октаве).
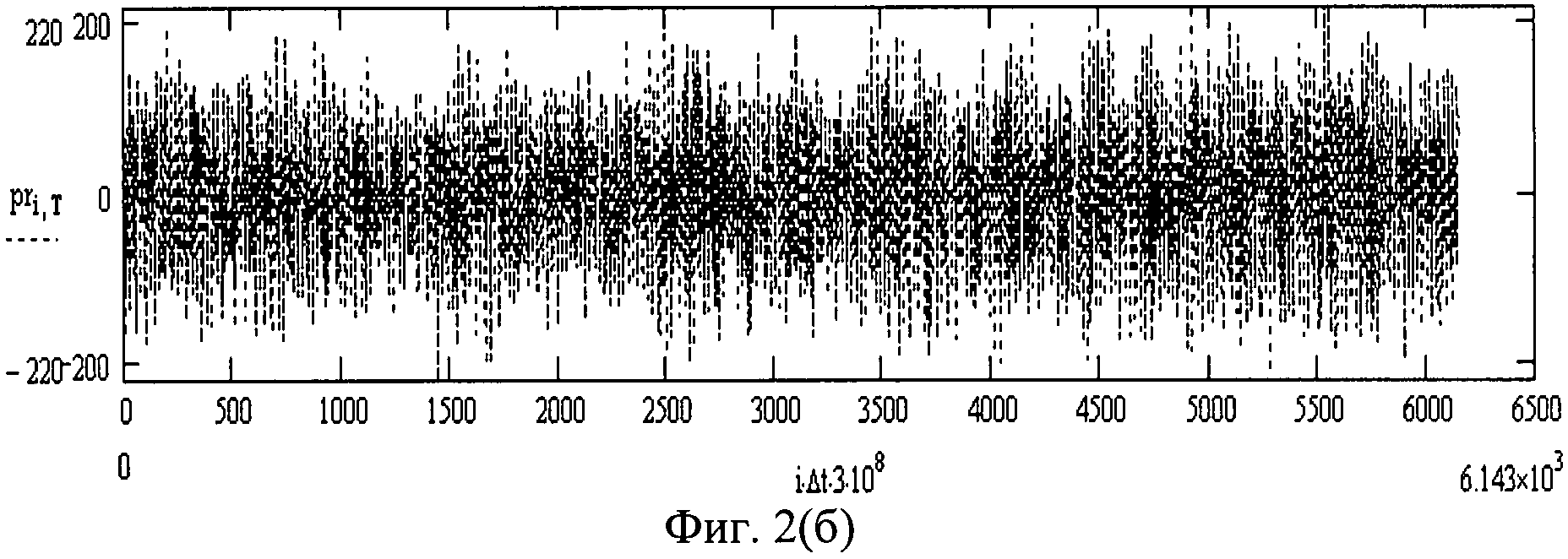
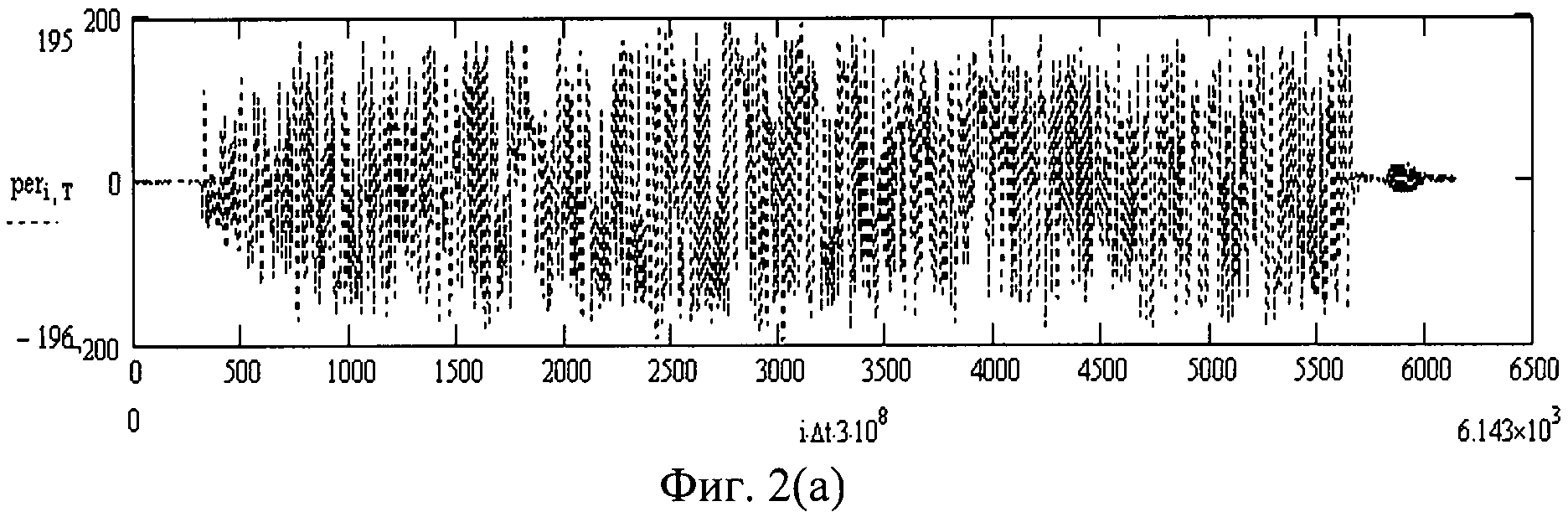
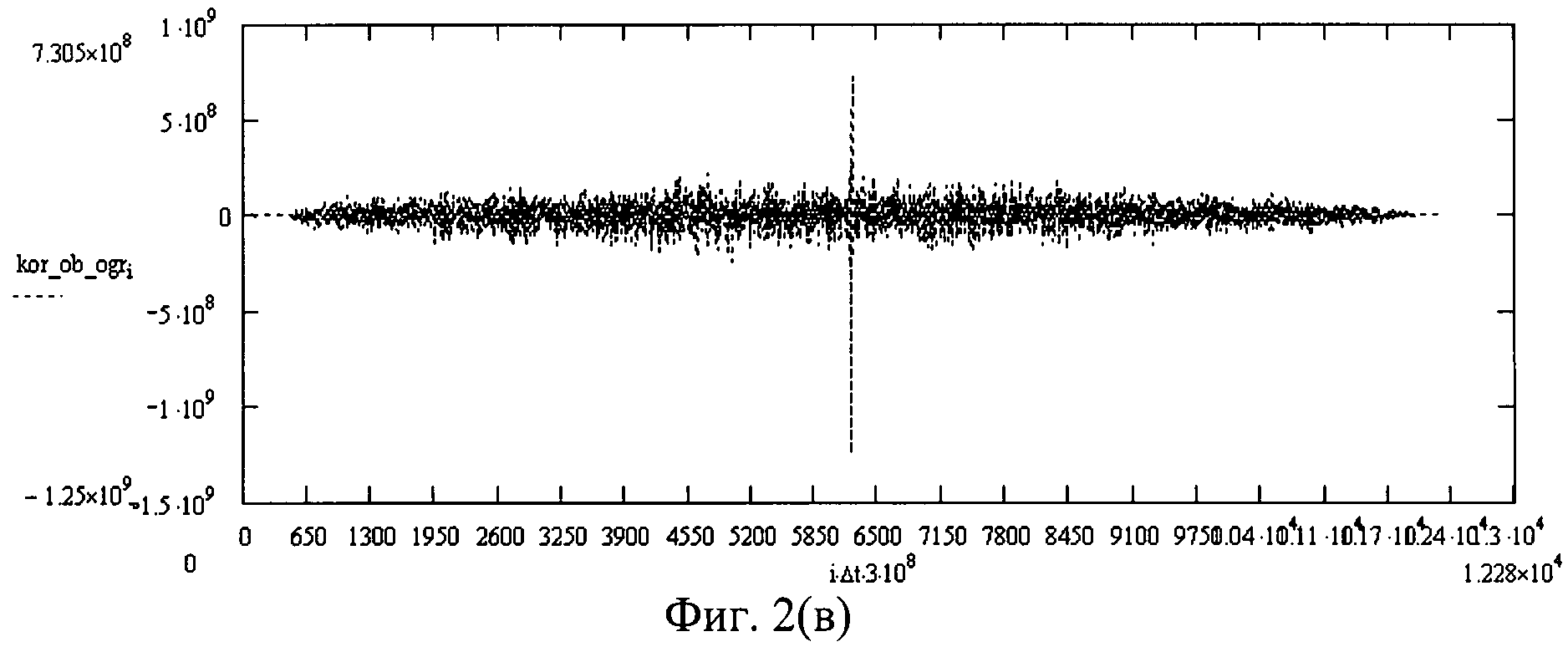
Экспериментальная проверка возможности сжатия сложных шумовых сигналов, отраженных на 2-й гармонике ЗС, подтверждает правильность рассмотренной модели функционирования НРЛ. На фиг.2(а) представлен шумовой зондирующий сигнал с базой D~1000. На фиг.2(б) представлен сигнал на выходе приемника 2-й гармоники ЗС, который содержит 2 составляющих - собственный шум приемника и шумовые колебания ЗС, отраженные от УВУ на 2-й гармонике. На фиг.2(в) представлен результат сжатия ЗС после взаимно корреляционной обработки на выходе приемного устройства.
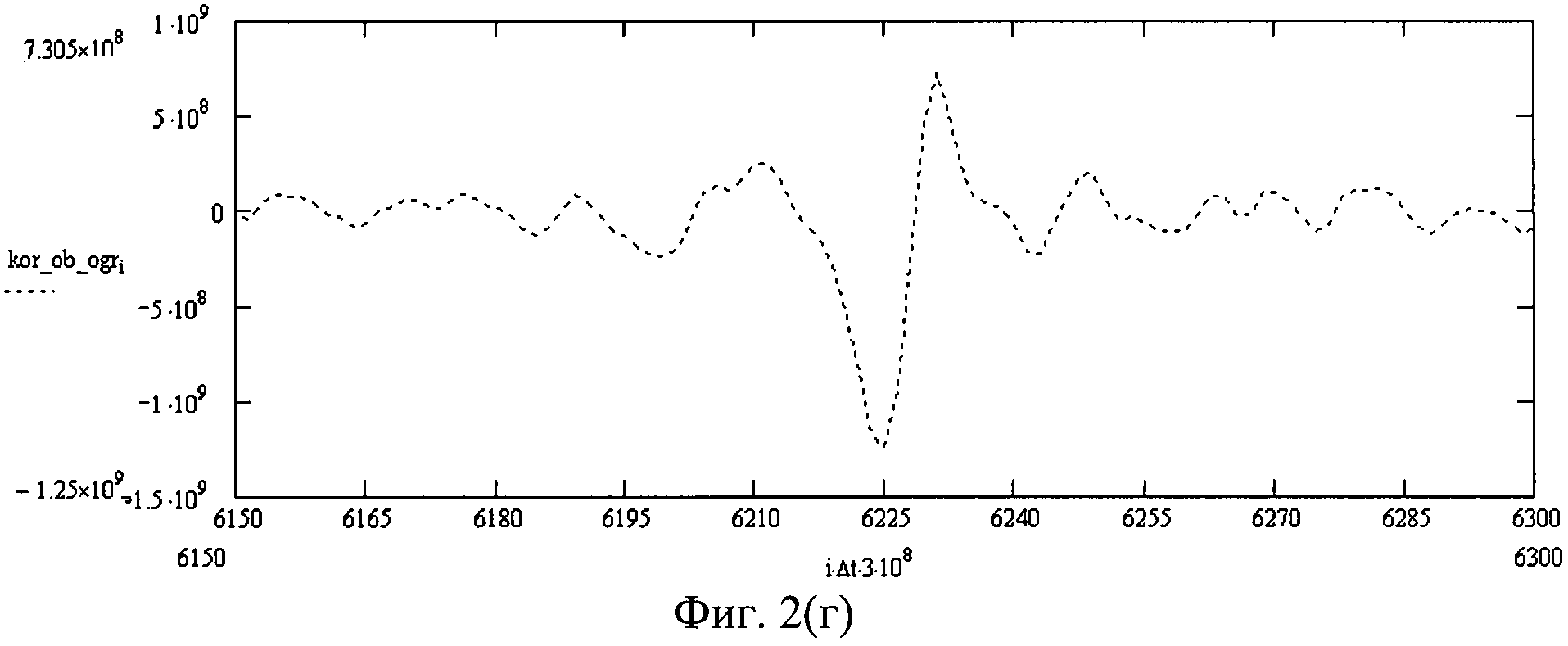
На фиг.2(г) представлен аналогичный результат в диапазоне дальностей, представляющих интерес для НРЛ.
Из полученных данных видно, что сигнал на выходе приемного устройства 2-й гармоники после взаимно корреляционной обработки с зондирующим сигналом, подвергнутым нелинейному преобразованию, укорачивается примерно в 1000 раз, то есть пропорционально базе зондирующего сигнала (см. фиг.2(г)).
Фактически это означает, что рассмотренный механизм функционирования НРЛ осуществляет лианеризацию принимаемых колебаний в схеме передатчик (1-я гармоника) - НЭ - приемник (2-я гармоника), что позволяет обоснованно применять для обработки в приемниках НРЛ известные методы линейной фильтрации сложных сигналов для выбранного типа модуляции (шумового или времяпозиционного кодирования) зондирующего сигнала.
Следует отметить, что измерения угловых координат, выполненные в каждом элементе разрешения по дальности, являются необходимым условием для применения моноимпульсных методов измерения угловых направлений.
Измерение угловых направлений в 2-х ортогональных плоскостях можно производить различными методами, которые широко апробированы в моноимпульсных системах [9].
Измерения угловых направлений электромагнитной волны, отраженной от НЭ в 2-х ортогональных плоскостях, азимутальной и угломестной, либо применение триангуляционных методов измерений в одной плоскости, используя для этого перемещение НРЛ в этой плоскости, позволяют однозначно оценить его местоположение.
Использование для этой цели данных по оценке запаздывания отраженных колебаний от НЭ малоэффективно, т.к. время из запаздывания определяется линейными цепями УВУ τЛ.Ц. (антенна, входной контур и т.п.), а возбуждение параметрических эффектов требует определенного времени τПАР для накачки энергии в контур. В результате запаздывание колебаний на выходе приемника определяется как
 ,
,
где  - запаздывание, которое соответствует истинному положению УВУ.
- запаздывание, которое соответствует истинному положению УВУ.
Поскольку τЛ.Ц. и τПАР являются характеристиками конкретного УВУ
и априорно неизвестны, то оценку  нельзя использовать для оценки местоположения УВУ.
нельзя использовать для оценки местоположения УВУ.
Отметим, что длительность огибающей зондирующего сигнала должна обеспечивать временные параметры накачки энергии в контур НЭ. Фактически данное условие определяет величину базы сложного широкополосного зондирующего сигнала, необходимую для возбуждения режима параметрического усиления в НЭ. Известно [13], что параметрические колебания развиваются за длительность τпар=0,2÷0,3 мксек.
С учетом данного обстоятельства, величина базы сложного широкополосного зондирующего сигнала в каждой n дискретной зоне с неизменяемой структурой при нелинейном преобразовании, равна
D≈mn·τпар·ω0
и составляет величину не менее 30 для метрового диапазона длин волн, что вполне достаточно для выделения резонансных вынужденных колебаний, отраженных от нелинейного элемента, на фоне собственного шума приемного устройства НРЛ.
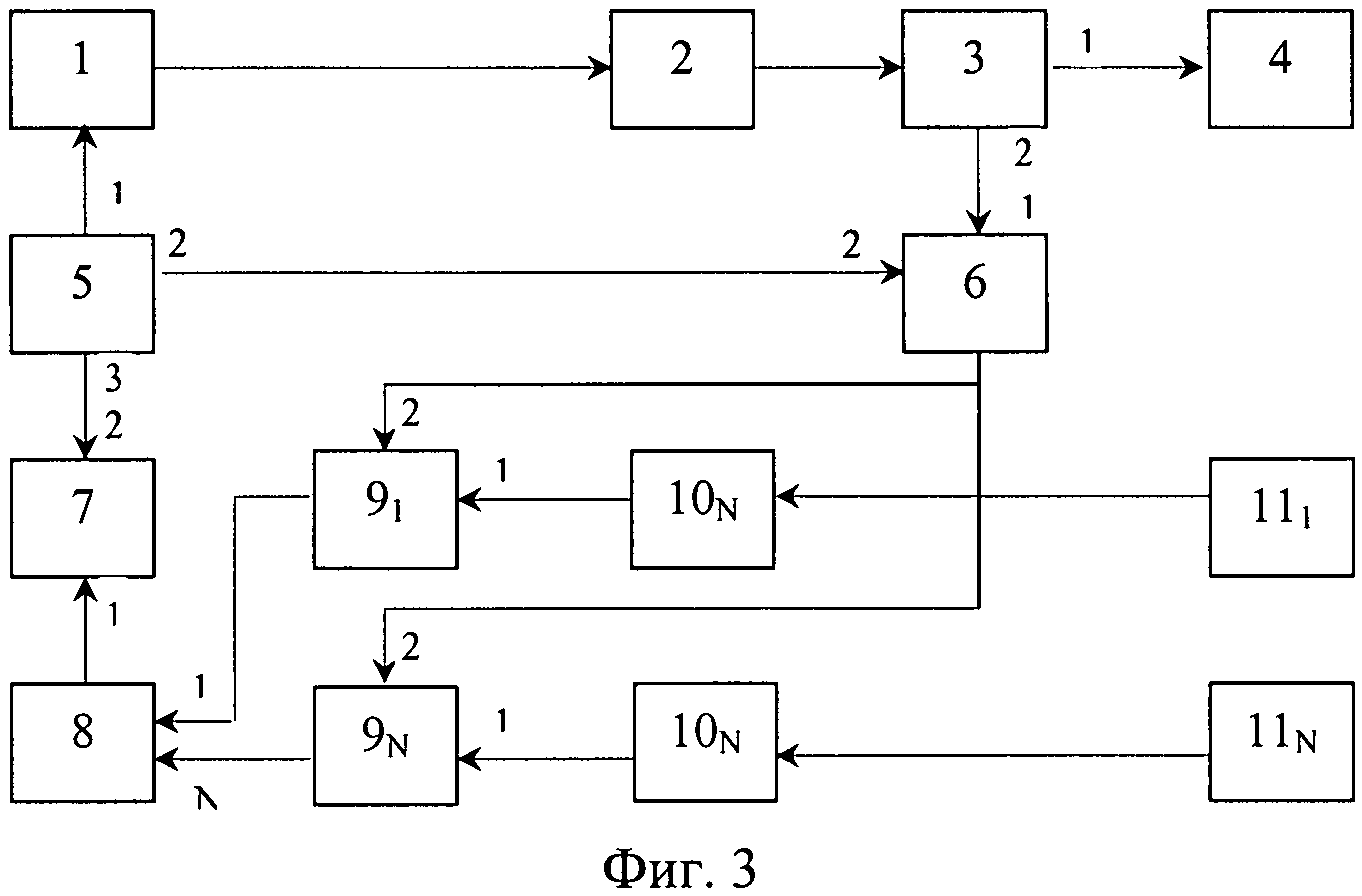
Структурная схема обзорного нелинейного радиолокатора, реализующая описанный выше способ в локальной зоне обнаружения по азимуту, представлена на фиг.3, где обозначено: 1 - передатчик, 2 - полосовой фильтр выделения основной гармоники и подавления высших гармоник, 3 - направленный ответвитель, 4 - передающая антенна, 5 - хронизатор, 6 - формирователь опорного напряжения для коррелятора, 7 - устройство отображения, 8 - измеритель параметров принимаемых сигналов, 91…N - приемники, настроенные на гармонические составляющие отраженного сигнала, 101…N - фильтры гармоник, 111…N - приемные антенны, N - число каналов.
Обзорный нелинейный радиолокатор дистанционно обнаруживает УВУ и измеряет положение их в пространстве. При этом важным фактором является время формирования положения УВУ, которое определяет целесообразность использования обзорного НРЛ в реальных практических применениях. Данные обстоятельства и определяют функционирование и структурную схему обзорного нелинейного радиолокатора, представленную на фиг.3.
Обзорный нелинейный радиолокатор в реальном времени определяет координаты всех УВУ, находящихся в зоне обзора. Устройство работает следующим образом. В передатчике 1 с помощью хронизатора 5 формируется мощный многодиапазонный широкополосный сложный сигнал, который фильтруется в блоке 2, где происходит выделение основной гармоники в каждом из n≥2 диапазонов зондирующего сигнала и подавление высших гармоник. Далее, сформированный сигнал через первый выход направленного ответвителя 3 поступает на передающую антенну 4 и облучает НЭ УВУ. В результате параметрического эффекта, за счет расширения полос Δf в УВУ, отклик сигнала принимается на N-й гармонике (N≥2n) на приемные антенны 111…11N и, проходя через фильтры гармоник 101…N, поступает на первые входы приемников 91…N. В приемниках 91…N эти сигналы подвергаются корреляционной обработке с опорным сигналом передатчика, поступающим на вторые входы приемников 91…N со второго выхода направленного ответвителя 3 через формирователь опорного напряжения 6, и сжатию. На выходах приемников 91…N обеспечивается выделение (например, пороговым устройством) сигналов на фоне шумов и помех и решается задача пространственного разрешения по дальности.
Выходы приемников 91…N поступают на входы блока 8, где производится измерение дальности до УВУ и, моноимпульсными методами [9, стр.21, 71, 100], угловых направлений прихода сигналов, отраженных от НЭ УВУ. Обработанная информация в блоке 8 обеспечивает определение местоположения НЭ УВУ, после чего результаты отображаются в блоке 7.
Таким образом, применение в НРЛ широкополосных сложных дискретных по частоте многодиапазонных зондирующих сигналов является необходимым и достаточным условием для обеспечения возбуждения в нелинейных элементах объектов поиска режима параметрического усиления с последующим нелинейным преобразованием отраженных колебаний вверх и вниз по частоте в частотные зоны, свободные от спектральных составляющих дискретного по частоте многодиапазонного зондирующего сигнала. Для перекрытия всего частотного диапазона связных радиостанций, используемых для подрыва УВУ, число дискретных частотных диапазонов многодиапазонного зондирующего сигнала должно быть не менее 2-3, число каналов по частоте в каждом приемном устройстве должно быть в 2 раза больше с учетом преобразования отраженных колебаний вверх и вниз по частоте. Для определения угловых направлений на объекты поиска необходимо реализовать моноимпульсный метод измерения угловых направлений с помощью N-канальной приемной системы. Число приемных каналов определяется отношением полной зоны обзора по угловой координате к ширине ДНА элементарных излучателей.
Литература
1. Нелинейная радиолокация. Сборник статей. Часть 2./ Под. ред. А.А.Горбачева, А.П.Колданова, А.А.Потапова, Е.П.Чигина - А.А.Горбачев, Е.П.Чигин. Взаимодействие электромагнитных волн с нелинейными объектами. М.: Радиотехника, 2006, с.6-13.
2. В.Б.Штейншлегер. К теории рассеяния электромагнитных волн вибратором с нелинейным контактом. Радиотехника и электроника, 1978, т.23, №7, с.1329-1338.
3. А.А.Горбачев, С.В.Ларцов, С.П.Тараканков, Е.П.Чигин. Амплитудные характеристики нелинейных рассеивателей. Радиотехника и электроника, 1996, т.41, №5, с.558-562.
4. Г.Н.Щербаков. Применение нелинейной радиолокации для дистанционного обнаружения малоразмерных объектов. Специальная техника, 1999, №1, с.34-39.
5. Г.Н.Щербаков, А.В.Николаев, B.C.Лапшин, Р.И.Усманов, С.А.Мухин. Применение нелинейной радиолокации для обнаружения террористических управляемых взрывных устройств. Специальная техника, 2010, №1, с.32-36.
6. А.В.Иванов, С.Н.Панычев, В.И.Подлужный, Н.Т.Хакимов. Параметрический метод обнаружения объектов с нелинейными рассеивателями. Известия вузов. Сер. Радиоэлектроника. 2003, №9-10, с.11-16.
7. Ю.С.Лезин Оптимальные фильтры и накопители импульсных сигналов. М.: Сов. радио, 1969.
8. А.А.Горбачев. Особенности зондирования электромагнитными волнами сред с нелинейными включателями. Нелинейная радиолокация. Сборник статей №2. М.: Радиотехника, 2006.
9. Д.Р.Родс. Введение в моноимпульсную радиолокацию. М.: Сов. радио, 1960.
10. А.А.Харкевич. Линейные и нелинейные системы. Т.2. М.: Наука, 1973.
11. М.Е.Жаботинский, Ю.Л.Свердлов. Основы теории и техники умножения частоты. М.: Сов. радио, 1964, с.328.
12. М.Букингем. Шумы в электронных приборах и системах. М.: Мир, 1986.
13. П.А.Горбачев. Нелинейный рассеиватель электромагнитных волн, создающий субгармоники. Нелинейная радиолокация. Сборник статей №2. М.: Радиотехника, 2006, с.69.
Способ измерения дальности цели в ближней радиолокации
Способ распознавания баллистических целей и определения координат точек их пуска и падения для обзорных радиолокационных станций
Способ и устройство обнаружения линейчатых структур
Устройство радиолокационного распознавания воздушных объектов
Система управления вентильным электродвигателем вращения антенны рлс
Способ обработки радиолокационной информации в сетевой информационной структуре автоматизированной системы управления
Стабилизированный квазирезонансный преобразователь
Стабилизированный квазирезонансный преобразователь
Радиолокационный способ определения углового положения цели и устройство для его реализации
Селективное устройство защиты на встречных стержнях
Способ измерения дальности цели в ближней радиолокации
Способ распознавания баллистических целей и определения координат точек их пуска и падения для обзорных радиолокационных станций
Способ и устройство обнаружения линейчатых структур
Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (афар)
Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления
Устройство радиолокационного распознавания воздушных объектов
Устройство радиолокационного распознавания воздушных объектов
Способ обнаружения и классификации малоразмерных объектов на изображениях, полученных радиолокационными станциями с синтезированной апертурой

