Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ТЕРМОТЕРАПИИ ТКАНИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству для термотерапии ткани, снабженному опорной поверхностью для поддержания, по меньшей мере, части тела пациента, и содержащему излучатель энергии, прикрепленный к держателю, для направления энергии вдоль фокусирующей оси к фокальному объему и манипулятор, содержащий блок передачи манипулятора, включающий в себя тело подвеса, блок привода передачи, прикрепленный к блоку передачи манипулятора, при этом блок привода передачи содержит, по меньшей мере, один привод передачи и держатель, подвешенный на тело подвеса, при этом блок передачи манипулятора может приводиться в действие блоком привода передачи, а держатель может приводиться в действие блоком передачи манипулятора.
УРОВЕНЬ ТЕХНИКИ
Устройство для термотерапии ткани известно из международной заявки WO 2005/107870. Заявлено, что устройство, описанное в заявке WO 2005/107870, пригодно для лечения опухолей в грудной ткани посредством высокоинтенсивного сфокусированного ультразвука (HIFU). В HIFU-системах ультразвуковая энергия, генерируемая излучателем энергии, фокусируется в небольшом фокальном объеме в конкретных целевых областях, например раковой ткани. При терапии луч сфокусированной энергии проникает сквозь ткань и вызывает локализованное повышение температуры на строго определенном участке, являющемся фокальным объемом. Таким образом, ультразвуковые лучи фокусируются на ткани, и, из-за энергетического воздействия в фокусе, температура внутри ткани повышается до уровня, полностью ее разрушающего. Повышение температуры, предпочтительно, создает строго определенные участки денатурации белка, необратимого повреждения клеток и некроза. Одиночное воздействие сфокусированной ультразвуковой энергии называется разрушением ультразвуком. Разрушение ультразвуком это процесс диспергирования, разрушения или деактивации биологических материалов посредством звуковых волн. Для абляции целевой ткани необходимо множественное разрушение ультразвуком. Четкое фокусирование необходимо для того, чтобы ограничить абляцию только целевой области патологического изменения, миомы, фибромы матки и т.п. пациента. Посредством данной технологии можно достичь точной абляции пораженной ткани в случае, если процедура управляется и контролируется с использованием магнитно-резонансной визуализации (MRI). Для организации воздействия энергии на пациента требуется планирование, направление энергии и мониторинг подачи энергии. Энергия не должна без необходимости распыляться или рассеиваться в опасных участках, например в нервах или витальных органах. Как правило, энергия излучается в целевом направлении вдоль фокусирующей оси в фокальный объем, находящийся на фокальном расстоянии от излучателя энергии. Устройство, описанное в документе WO 2005/107870, имеет отношение к устройству для позиционирования генерирующего энергию средства агрегата для теплотерапии биологических тканей. Позиционирование генерирующего энергию средства по документу WO 2005/107870 осуществляется в плоскости между нижней секцией MRI-сканирующего устройства и опорой, удерживающей пациента. Генерирующее энергию средство по документу WO 2005/107870 применяется для излучения энергии вдоль фокусирующей оси, при этом фокусирующая ось ориентирована по существу параллельно фронтальной плоскости и фокальный объем располагается с наружной стороны туловища, при этом обходя участки внутри туловища под грудной тканью. Фронтальная плоскость разделяет человеческое тело на вентральную часть и дорсальную части. Фронтальная плоскость является перпендикулярной средней плоскости, которая разделяет тело на левую и правую стороны. Устройство по документу WO 2005/107870 избегает излучения энергии параллельно медианной плоскости в опасные участки, в которых размещаются витальные органы. Для этого устройство позиционирования из документа WO 2005/107870 содержит генерирующее энергию средство, подвешенное на кольцеобразной раме. Устройство по документу WO 2005/107870 допускает два перпендикулярных перемещения генерирующего энергию средства параллельно фронтальной плоскости пациента, в документе WO 2005/107870 обозначаемых как Т1 и Т2. Для организации перпендикулярных перемещений Т1 и Т2 рамы подвески предоставляются перпендикулярные рейки. Устройство позиционирования по документу WO 2005/107870 допускает два поворота генерирующего энергию средства, в документе WO 2005/107870 обозначенных как R1 и R2. Таким образом, маневренность генерирующего энергию средства по документу WO 2005/107870 содержат два перемещения Т1 и Т2 и два поворота R1 и R2 для позиционирования и ориентации генерирующего энергию средства относительно опоры, удерживающей пациента.
Однако если требуется терапия ткани, расположенной внутри туловища под грудным покровом, или если лечение направлено на абляцию простаты или в случае лечения матки, то компонент задания направления энергии, пересекающего фронтальную плоскость, является относительно большим по сравнению с компонентом, задающим направление, составляемое фронтальной плоскостью. В целях минимизации и, предпочтительно, устранения рисков излучения энергии в непредназначенные для этого участки, например, внутренней части туловища, в которых находятся витальные органы, нервы и т.п., излучатель энергии должен быть направлен и ориентирован с высокой точностью и высокой воспроизводимостью относительно ткани, подвергаемой обработке. Точное позиционирование излучателя или передатчика является важным для локализации фокального объема только в целевой ткани. Точная ориентация излучателя энергии является основополагающей для выравнивания фокусирующей оси излучения энергии с допустимой траекторией, ведущей к целевой ткани, в целях обхода возможных опасных участков, витальных органов, нервов и т.п. Для предоставления оператору обратной связи и информации об области повышения температуры, относящейся к области нарушения, подвергаемой лечению, может применяться MRI-оборудование. Положение фокального объема и ориентация фокусирующей оси должны осуществляться компактным устройством для обеспечения возможности терапии ткани совместно с диагностическим оборудованием, таким как MRI. Оборудование такого типа предоставляет только ограниченное пространство для установки и функционирования устройства позиционирования. Общеизвестно, что объем, доступный пациенту внутри цилиндрической области или области сканирования оборудования MRI, сильно ограничен, что может вызвать недомогание, особенно у пациентов, страдающих клаустрофобией. Устройство позиционирования из заявки WO 2005/107870 не подходит для точного позиционирования и выравнивания энергии, проникающей в участки тела, находящиеся внутри туловища, поскольку устройство позиционирования из заявки WO 2005/107870 предназначено для фокусирования энергии в плоскости, в основном параллельной фронтальной плоскости, с наружной стороны туловища и через грудную ткань, покрывающую туловище, и не предназначено для позиционирования фокального объема и генерирующего энергию средства внутри туловища вдоль направления, в основном перпендикулярного фронтальной плоскости или пересекающего ее. Еще одна проблема устройства из заявки WO 2005/107870 заключается в том, что устройство по своему существу является крупногабаритным из-за укладки компонентов, что будет объясняться ниже в данном документе. Кольцеобразная рама расположена между набором реек в целях обеспечения перемещения Т2. Устройство из заявки WO 2005/107870 содержит два удлиненных тела для обеспечения перемещения Т1. Тела должны быть удлиненными, поскольку рукоятки должны находиться вне цилиндра MRI для того, чтобы они были доступны для ручного управления. В случае если для управления вышеупомянутыми рукоятками применяется электрооборудование, то это электрооборудование должно находиться вне цилиндра MRI в целях предотвращения искажения и наложения магнитного поля оборудования на магнитное поле, генерируемое и интерпретируемое оборудованием MRI и используемое для предоставления обратной связи для управления и контроля положения и ориентации генерирующего энергию средства. Таким образом, для обеспечения двух перемещений Т1 и Т2 в устройстве из заявки WO 2005/107870 необходимо четыре компонента. Если диапазон позиционирования кольцеобразной рамы максимизирован, то диапазон возможных перемещений Т1 и Т2 также должен быть максимизирован. Это обычно осуществляется посредством многоуровневых регуляторов движения. В случае максимизации Т1 и Т2 в устройстве из заявки WO 2005/107870 невозможно разместить продольные оси вышеупомянутых реек в той же плоскости, что и плоскость, определяемая продольными осями вышеупомянутых удлиненных тел, поскольку рейки не могут пересекаться с удлиненными телами. По этой причине плоскость, содержащая продольные оси реек, должна находиться на некотором расстоянии от плоскости продольных осей удлиненных тел. Расстояние, необходимое для размещения реек и тел в разных плоскостях, конфликтует с требованиями уплощения и компактизации устройства, которые нужны для его размещения в цилиндре MRI-устройства без недопустимого ограничения объема, остающегося доступным для пациентов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление устройства для термотерапии ткани, имеющего тип, указанный в первом параграфе описания, которое может точно позиционировать и ориентировать излучатель энергии с экономией места, при этом обеспечивая пять степеней свободы для размещения фокального объема энергии в основном вдоль фокусирующей оси.
С помощью устройства для термотерапии ткани, согласно изобретению данная цель достигается тем, что блок передачи манипулятора включает в себя первый подблок передачи для перемещения и поворота тела подвеса в плоскости, в основном параллельной поверхности опоры, и включает в себя второй подблок передачи для передвижения излучателя энергии вдоль фокусирующей оси и поворота излучателя энергии вокруг двух различных осей, перпендикулярных фокусирующей оси.
В целях анализа и характеристики функционирования устройства позиционирования будут использоваться степени свободы твердого тела. Степени свободы твердого тела представляют собой множество независимых сдвигов и поворотов, полностью задающих положение и ориентацию твердого тела относительно системы координат. Сдвиги твердого тела описывают способность твердого тела к перемещению в каждом из трех измерений. Повороты твердого тела описывают способность твердого тела изменять угол относительно трех перпендикулярных осей, характеризующих три измерения. Таким образом, максимально твердое тело может иметь шесть независимых степеней свободы. Генерирующее энергию средство устройства из заявки WO 2005/107870 имеет две степени свободы R1 и R2 относительно кольцеобразной рамы, к которой подвешено вышеупомянутое средство, а кольцеобразная рама подвески имеет две степени свободы Т1 и Т2 относительно своей опоры. Блок передачи манипулятора согласно изобретению включает в себя первый подблок для перемещения и поворота тела подвеса в плоскости, в основном параллельной поверхности опоры, вместо реек и удлиненных тел устройства согласно заявке WO 2005/107870. В устройстве согласно заявке WO 2005/107870 используется четыре компонента, а именно две рейки и два удлиненных тела. Компоненты, необходимые в первом подблоке для осуществления перемещения и поворота тела подвеса, могут быть расположены таким образом, чтобы при реализации компактного устройства согласно изобретению требовался, по существу, небольшой объем для его установки. В качестве еще одного преимущества можно отметить, что при использовании устройства согласно изобретению для позиционирования тела подвеса не требуется вертикального монтажа компонентов. Излучатель энергии подвешен на теле подвеса. Второй подблок передачи может перемещать излучатель энергии вдоль фокусирующей оси и может поворачивать излучатель энергии вокруг двух различных осей, перпендикулярных фокусирующей оси. Таким образом, излучатель энергии имеет три независимых степени свободы относительно тела подвеса. Тело подвеса имеет две независимых степени свободы относительно поверхности опоры. Излучатель энергии согласно изобретению, таким образом, может позиционироваться и ориентироваться относительно поверхности опоры с пятью независимыми степенями свободы. Для позиционирования фокального объема возможны три перемещения, и два поворота возможны для ориентации фокусирующей оси относительно поверхности опоры. Однако для обеспечения максимальной маневренности излучателя могут быть реализованы максимум шесть степеней свободы. Реализация шести независимых степеней свободы происходит за счет значительного количества аппаратных средств. Энергия обычно излучается в объем, ограниченный поверхностью приблизительно конической формы. Фокусирующая ось это ось вращательной симметрии относительно вышеупомянутой конической поверхности. Из-за вышеупомянутой вращательной симметрии вокруг фокусирующей оси, поворот распределения энергии вокруг фокусирующей оси считается менее важным, чем поворот вокруг двух различных осей, перпендикулярных фокусирующей оси. По этой причине аппаратные средства, необходимые для осуществления поворота излучателя вокруг фокусирующей оси, исключаются, и излучатель может маневрировать с пятью независимыми степенями свободы, включая возможность передвижения в направлении, пересекающем поверхность опоры. Возможность перемещения перпендикулярно поверхности опоры позволяет осуществлять терапию ткани внутри туловища человека под грудным покровом.
Поскольку изобретение по своей сути приводит к компактным вариантам осуществления, то это дает большую свободу в оптимизации геометрии конструкции в отношении жесткости конструкции. Жесткость устройства позволяет производить точное и воспроизводимое передвижение излучателя. Деформация, как правило, приводит к эластичной структуре, которую трудно контролировать посредством обратной связи с MRI. Излучатель будет находиться близко к области нарушения пациента, то есть внутри цилиндра, тогда как электродвигатель будет располагаться вне детектируемого объема сканирующего оборудования в целях предотвращения наложения магнитного поля, продуцируемого, например, приводным двигателем, с сигналами магнитного резонанса, которые должны обнаруживаться оборудованием MRI. Для соединения электродвигателя и излучателя требуется несколько деталей трансмиссии. Геометрически жесткая конструкция позволяет использовать материалы, которые не обязательно имеют высокий модуль Юнга или модуль упругости. При этом данные части должны быть сделаны из материалов, имеющих магнитные свойства, подходящие для использования в оборудовании для магнитно-резонансной визуализации. Широкий класс синтетических пластмасс обладает магнитными свойствами, подходящими для использования в оборудовании для магнитно-резонансной визуализации. Эти синтетические пластмассы могу быть армированы волокнами для улучшения их механической прочности. Однако вышеупомянутые пластмассы не обязательно имеют высокий модуль Юнга. По этой причине большим преимуществом является то, что геометрическая жесткость конструкции позволяет использовать немагнитные материалы, такие как синтетические пластмассы, возможно, армированные волокнами. Геометрическая жесткость позволяет применять эти сравнительно эластичные материалы в устройстве согласно изобретению. Особенно подходящим для применения является материал, называемый Werkstoff "S"®. Помимо подходящих магнитных свойств, он также имеет хорошую устойчивость против износа и против химических реагентов и сохраняет свою форму в присутствии воды, поскольку он не вступает в соединение с водой. В случае использования Werkstoff "S"® производится водонепроницаемый механизм позиционирования излучателя, и излучатель энергии может быть погружен в воду для передачи ультразвуковых волн. Предпочтительными являются скользящие свойства, которые желательны для хорошего механического гистерезиса. Однако подходящие магнитные свойства не обязательно исключают высокий модуль упругости или модуль Юнга, как в случае керамических материалов. Керамические материалы могут использоваться в компонентах, нагруженных большими изгибающими моментами, поскольку они сохраняют форму, являются магнитно-совместимыми с магнитно-резонансной визуализацией, и обладают высоким модулем упругости. Среди керамических материалов категория оксидов содержит такие материалы, как оксид алюминия (Al2O3) или оксид цинка (ZnO). Вышеупомянутые материалы подходят для использования в предпочтительных вариантах осуществления устройства. Также подходящими для использования являются материалы из категории карбидов. В качестве примера широкодоступного на рынке материала можно упомянуть карбид кремния (SiC). Также создается большая свобода проектирования для оптимизации трения в конструкции. Большое трение в комбинации с низкой жесткостью вызывает механический гистерезис. Механический гистерезис проявляется во временном сдвиге между смещением или поворотом держателя и изменением угла поворота двигателя. Этот временной сдвиг между действием двигателя и ответом держателя препятствует точному управлению системой позиционирования посредством обратной связи, предоставляемой MRI-системой. Суммарное отношение жесткости устройства к трению предпочтительно должно быть высоким для того, чтобы оно не претерпевало гистерезис. Поскольку изобретение по своей сути приводит к компактным вариантам осуществления с ограниченным числом жестких компонентов, то трение в конструкции легче оптимизировать. С одной стороны, число контактов ограничено по причине ограниченного числа компонентов, и, с другой стороны, компоненты могут быть спроектированы жесткими, как объяснялось выше. Жесткие компоненты предусматривают меньшую деформацию компонентов, результатом чего являются строго определенные состояния контактов между взаимодействующими компонентами. При строго определенном контакте между компонентами достигается улучшение контроля трения между компонентами.
Вариант осуществления устройства согласно изобретению определяется тем, что тело подвеса содержит удаленные части и первый подблок передачи содержит подвижно направляемые опоры и регуляторы движения опор, при этом каждая из удаленных частей соединена с возможностью вращения с, по меньшей мере, одной подвижно направляемой опорой, поддерживаемой по меньшей мере одним регулятором движения опор. Если подвесное устройство соединено с возможностью вращения с подвижно направляемой опорой, то предварительное напряжение и трение могут быть минимизированы для соединения между удаленными частями тела подвеса и подвижно направляемыми опорами, а также между подвижно направляемыми опорами и регулятором движения опор. Это благоприятно влияет на точность и воспроизводимость позиционирования, как объяснялось выше. Соединение удаленных частей вместо близких частей тела подвеса для разделения подвижно направляемых опор благоприятно влияет на точность, достижимую при повороте тела подвеса в плоскости, в основном параллельной поверхности опоры.
Вариант осуществления устройства согласно изобретению определяется тем, что первый подблок передачи содержит по меньшей мере одно тело передачи для взаимодействия с одной из подвижно направляемых опор, при этом он соединен с отдельным ведущим элементом передачи блока привода передачи. В случае вращаемого тела передачи, тело передачи может быть настроено на преобразование поворота в управляемое перемещение подвижно направляемой опоры. Подвижно направляемая опора может размещаться во множестве позиций вдоль своего регулятора движения. За счет управления подвижно направляемой опорой посредством вращаемого тела передачи суммарная длина системы между отдельным ведущим элементом передачи и регулятором движения опоры может быть ограничена фиксированным значением. Также может использоваться передвижное тело передачи, например гидравлический цилиндр. Гидравлический цилиндр может взаимодействовать с водой, при этом на воду может оказываться давление посредством гидравлического насоса в качестве варианта осуществления ведущего элемента передачи. Вращаемое тело передачи может быть заменено передвижным компонентом, установленным таким образом, что расстояние между электродвигателем и подвижно направляемой опорой может меняться, например, посредством рейки из механизма реечной передачи. Тело передачи также может быть зубчатым приводом, ременным приводом или цепным приводом. Еще одно преимущество тела передачи заключается в том, что блок привода передачи может находиться вне сканируемого объема в целях предотвращения возможного наложения электромагнитных полей ведущего элемента и MRI-устройства, а также он является доступным для ручного управления. Дополнительным преимуществом вращаемого тела передачи является то, что на тело передачи легко установить измеряющее устройство для получения обратной связи на число оборотов ведущего элемента и положение направляемого тела.
Вариант осуществления устройства согласно изобретению определяется тем, что каждая из удаленных частей имеет первую ось вращения относительно подвижно направляемой опоры, с которой соединена соответствующая удаленная часть, при этом тело передачи, взаимодействующее с соответствующей подвижно направляемой опорой, содержит первую резьбовую часть, вышеупомянутая часть имеет первую продольную ось, а вышеупомянутая первая продольная ось пересекается с вышеупомянутой первой осью вращения. Первая резьбовая часть может иметь кромку, например, винтообразной или спиральной формы, взаимодействующую с подвижно направляемой опорой. Один поворот тела передачи переводится через первую резьбовую часть в перемещение подвижно направляемой опоры на определенную длину, называемую шагом. Для точной установки подвижно направляемой опоры вдоль ее регулятора движения и для точного позиционирования и поворота тела подвеса предпочтительным является применение маленького шага. По причине пересечения вышеупомянутых осей на первую резьбовую часть и тело передачи, содержащее вышеупомянутую первую резьбовую часть, не действуют никакие поперечные силы или изгибающие моменты. Поперечные силы и изгибающие моменты приводят к сравнительно большим деформациям по сравнению с деформациями, связанными с чисто двухтактными нагрузками. Как объяснялось выше, большие деформации являются вредоносными для точности и воспроизводимости позиционирования тела подвеса.
Вариант осуществления устройства согласно изобретению определяется тем, что, по меньшей мере, часть подвижно направляемой опоры упруго деформируется для установления предварительного напряжения между подвижно направляемой опорой и первой резьбовой частью, которую содержит тело передачи, взаимодействующее с соответствующей подвижно направляемой опорой. С помощью управляемого предварительного напряжения можно предотвратить мертвый ход механизма. Возможный люфт, появляющийся из-за неплотного соединения передаточных механизмов или других механических элементов, может вызвать резкий или интенсивный обратный выпинг. Такое движение оказывает вредное воздействие на позиционирование излучателя при точности позиционирования, по порядку величины составляющей 0.1 мм.
Вариант осуществления устройства согласно изобретению определяется тем, что держатель содержит три рычага, подвижно подвешенных к телу подвеса. Излучатель энергии, предпочтительно, не должен деформироваться. Излучатель энергии может содержать ряд компонентов, которые могут претерпевать механическую деформацию. Желательно, чтобы держатель позиционировал излучатель энергии статически определенным образом, при этом уравнения статического равновесия являются достаточными для определения внутренних сил в держателе и сил реакции на излучатель энергии. Статически определенная структура, например излучатель, может быть определена как структура, в которой, в случае если можно найти внутренние воздействия внешних нагрузок в состоянии равновесия, эти внутренние воздействия являются уникальными. Как правило, для задания статического равновесия структуры в общем случае и излучателя в частности требуется шесть уравнений. Вышеупомянутые шесть уравнений определяют величину шести независимых внешних сил, приложенных к излучателю. Три рычага, которые содержит держатель, прилагают эти три внешних силы. Каждый рычаг может, например, прилагать к излучателю две перпендикулярные силы. Путем применения трех рычагов можно удерживать излучатель с минимальной деформацией излучателя. Каждый из этих трех рычагов может быть подвижно подвешен к телу подвеса таким образом, что он может поворачиваться вокруг центра вращения, при этом ось вращения зафиксирована относительно тела подвеса. Помимо своей точки вращения, рычаг имеет еще две характеристических точки, а именно два конца рычага, при этом концы рычага отличаются от точки вращения. Посредством концов рычага он соединяется с другими компонентами. Один конец рычага может быть соединен с возможностью вращения с излучателем, тогда как другой может быть соединен с механизмом, содержащимся во втором блоке передачи. Конец рычага, соединенный с излучателем, будет называться концом излучателя. Конец рычага, соединенный с механизмом, содержащимся во втором блоке передачи, будет называться концом механизма. Рычаг может быть расположен таким образом, что прямая, соединяющая конец излучателя и точку вращения, перпендикулярна прямой, соединяющей точку вращения и конец механизма. Ось вращения может быть ориентирована таким образом, что ось вращения перпендикулярна плоскости, проходящей через точку вращения и две концевые части рычага. Рычаг может быть подвешен на тело подвеса таким образом, что прямая, соединяющая точку вращения и конец механизма, будет перпендикулярна поверхности опоры в исходном состоянии рычага. В результате использования такого поворотного рычага движение конца механизма является в основном параллельным поверхности опоры. Поскольку рычаг является жестким, движение конца механизма передается в движение конца, пересекающее поверхность опоры. По этой причине рычаг может успешно применяться для преобразования движения в первом направлении, например, параллельном поверхности опоры и пересекающем направление оси вращения, в движение, пересекающее первое направление. В эффективной конструкции держатель содержит три таких рычага. Каждый рычаг имеет один конец излучателя, а держатель содержит три конца излучателя, называемые первым, вторым и третьим концами излучателя. Три рычага могут быть расположены таким образом, что концы излучателя задают плоскость, называемую плоскостью излучателя. Излучатель испускает энергию вдоль фокусирующей оси. Фокусирующая ось задает плоскость, перпендикулярную фокусирующей оси и проходящую через фокальный объем, которая называется фокальной плоскостью. Излучатель может быть установлен в держателе таким образом, что фокальная плоскость остается параллельной плоскости излучателя. Фокусирующая ось в этом случае перпендикулярна плоскости излучателя. Первый и второй концы излучателя задают первую прямую в плоскости излучателя. Третий конец излучателя может быть размещен таким образом, что третий конец излучателя не будет находиться на первой прямой. В оставшейся части данного абзаца перемещения и вращения предполагаются малыми. Если третий конец излучателя перемещается параллельно фокусирующей оси, и при этом первый и второй концы излучателя не перемещаются, то плоскость излучателя и излучатель вращаются вокруг первой прямой, при этом первая прямая перпендикулярна фокусирующей оси. Эта первая прямая является, следовательно, первой осью вращения излучателя. Если первый и второй концы излучателя перемещаются на одинаковое расстояние параллельно фокусирующей оси, но в противоположных направлениях, и в то же время третий конец излучателя не перемещается, то плоскость излучателя и сам излучатель поворачиваются вокруг второй оси вращения. Вторая ось вращения проходит через третий конец излучателя и через четвертую точку на первой прямой, а вышеупомянутая четвертая точка является средней точкой между первым и вторым концами излучателя. Вторая ось вращения отлична от первой оси вращения и перпендикулярна фокусирующей оси. Если первый и второй концы излучателя перемещаются параллельно направлению фокусирования, но на разное расстояние, то четвертая точка находится на первой прямой, но не обязательно между первым и вторым концами излучателя. Если первый, второй и третий концы излучателя перемещаются на одно и то же расстояние в одном направлении, то ориентация плоскости излучателя остается неизменной, и излучатель перемещается вдоль фокусирующей оси. Можно сделать вывод о том, что наличие трех рычагов является предпочтительным, поскольку может быть осуществлено два независимых вращения и перемещение излучателя энергии, при этом минимизируется механическая деформация излучателя энергии.
Вариант осуществления устройства согласно изобретению определяется тем, что второй подблок передачи содержит три механизма, при этом каждый механизм взаимодействует с одним из трех рычагов, а каждый рычаг подвижно соединен с одним из трех механизмов. Преимущество соединения отдельного механизма с каждым рычагом заключается в том, что при этом для того, чтобы управлять более чем одним рычагом с помощью только одной передачи, не требуются муфты.
Вариант осуществления устройства согласно изобретению определяется тем, что блок привода передачи содержит три дополнительных ведущих элемента передачи, при этом каждый механизм соединен с одним из трех дополнительных ведущих элементов передачи, и каждый из трех дополнительных ведущих элементов передачи соединен с одним из трех механизмов. Преимущество соединения отдельного ведущего элемента передачи с каждым механизмом заключается в том, что при этом для того, чтобы управлять более чем одним механизмом с помощью только одного ведущего элемента, не требуются муфты.
Изобретение также относится к MRI-устройству, предоставленному вместе с устройством согласно данному изобретению для термотерапии ткани.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты устройства согласно данному изобретению будут пояснены на примерах и описаны со ссылкой на чертежи, на которых:
Фиг.1 представляет собой вид в перспективе, схематически изображающий вариант осуществления MRI-устройства согласно изобретению.
Фиг.2 представляет собой схематическое изображение варианта осуществления устройства согласно изобретению.
Фиг.3-14 являются схематическими изображениями частей варианта осуществления, изображенного на фиг.2.
Фиг.15 представляет собой поперечное сечение, соответствующее XV-XV на фиг.5.
Фиг.16 является схематическим изображением части варианта осуществления, изображенного на фиг.2.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
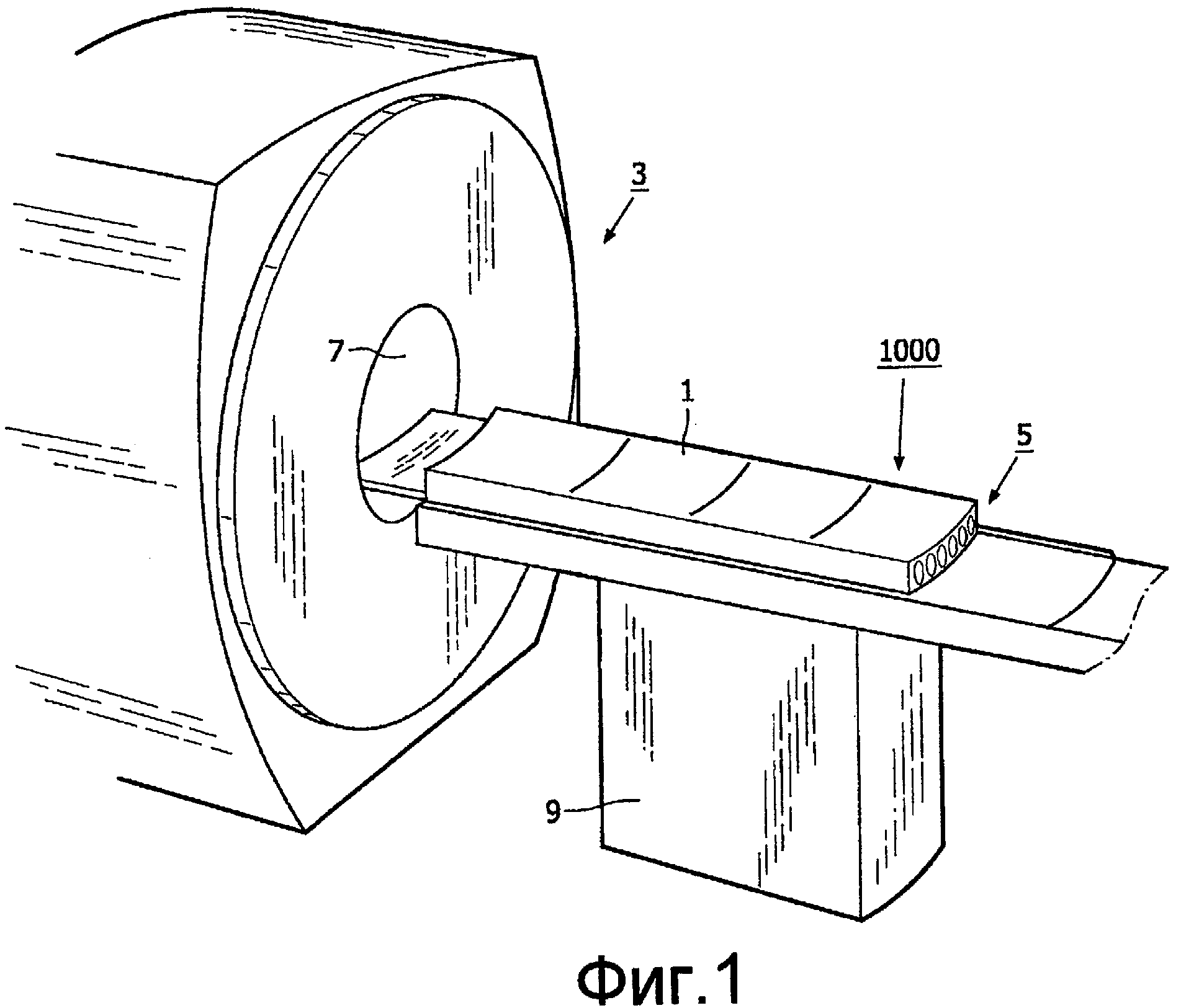
На фиг.1 схематически изображен вариант осуществления устройства для магнитно-резонансной визуализации (MRI) 3 согласно изобретению. Канал 7 MRI-устройства 3 виден и указан. MRI-устройство 3 содержит стол 9 и вариант осуществления устройства согласно изобретению 1000. Устройство 1000 содержит поверхность 1 опоры для поддержки, по меньшей мере, части тела пациента, и блок 5 привода передачи. В качестве возможных вариантов осуществления ведущих элементов передачи, которые содержит блок 5 привода передачи, можно упомянуть один или более шаговых электродвигателей, механизмов для ручного управления, приводимых реек, соединенных со штангами, гидравлических насосов и т.п. Устройство 1000 может быть сдвинуто от стола 9 в узкое место канала 7 устройства магнитно-резонансной визуализации (MRI) 3. Область, доступная для пациента, размещенного на поверхности 1 опоры, ограничена областью внутри канала 7 над поверхностью 1 опоры. Область, доступная для излучателя энергии и устройства позиционирования излучателя энергии, ограничена областью внутри канала 7 под поверхностью 1 опоры. Для наибольшего возможного облегчения состояния пациента, возможно, страдающего от клаустрофобии, область, занимаемая устройством позиционирования согласно изобретению, должна быть как можно меньше. Блок 5 привода передачи должен быть доступен снаружи канала, и электрические устройства, возможно, содержащиеся в блоке 5 привода передачи, должны оставаться вне канала 7 в целях предотвращения возможного наложения полей, генерируемых ведущими элементами передачи блока 5 привода передачи, и магнитных полей, используемых в устройстве магнитно-резонансной визуализации 3.
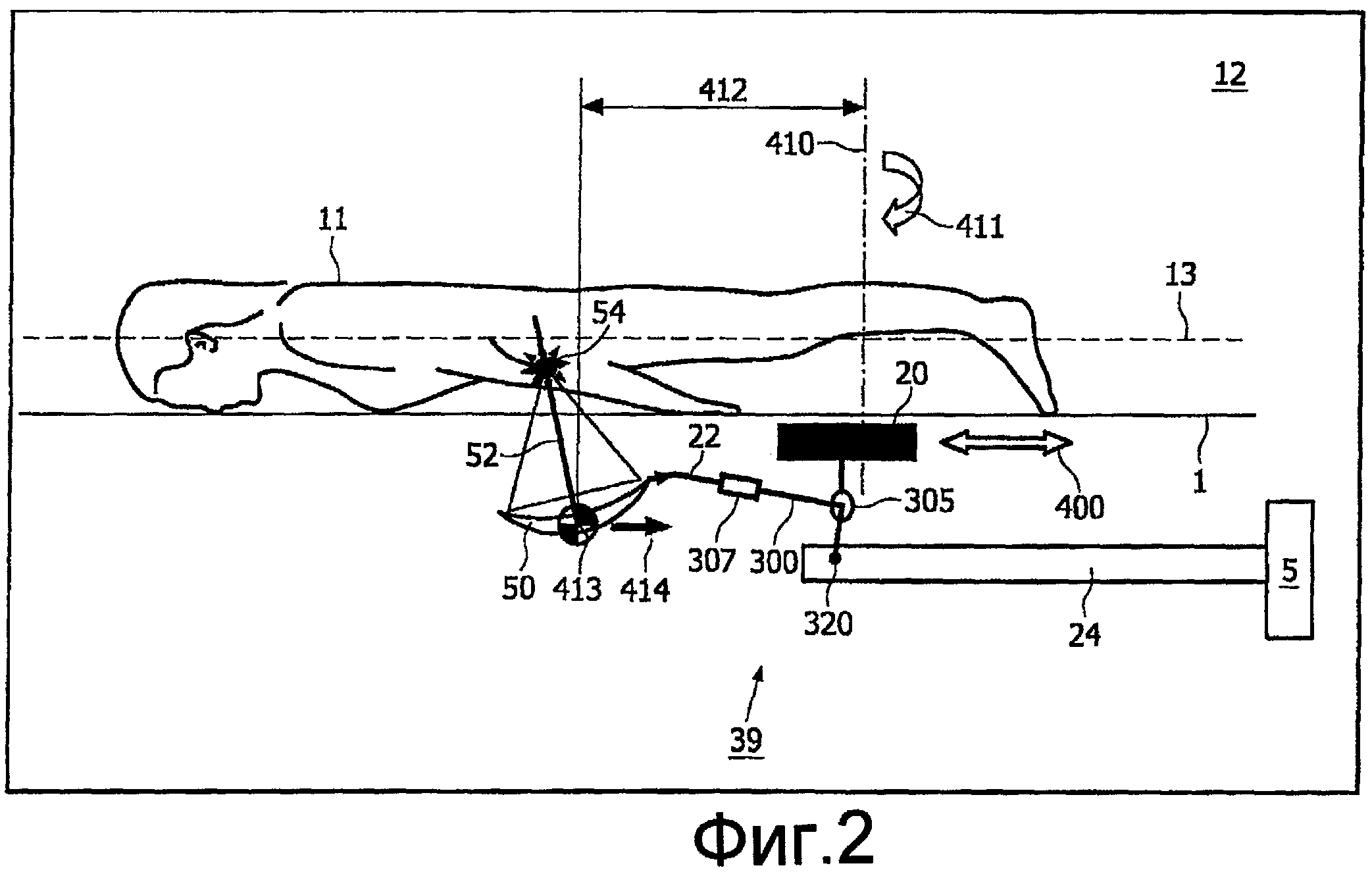
На фиг.2 показано устройство согласно изобретению в плоскости поперечного сечения, перпендикулярной поверхности 1 опоры. Плоскость поперечного сечения параллельна срединной плоскости 12 и перпендикулярна поверхности 1 опоры. Предполагается, что поверхность 1 опоры и фронтальная плоскость 13 тела 11 пациента параллельны, однако возможными являются различные положения тела 11 пациента относительно поверхности опоры. Положение 11 тела пациента, показанное в качестве примера на фиг.2, не ограничивает рамки применения изобретения. Излучатель 50 энергии установлен на держателе 22. Держатель 22 подвешен к телу 20 подвеса. Держатель 22 содержит рычаг 300. Рычаг 300 содержит конец 320 механизма. Своим концом 320 механизма рычаг 300 соединен с возможностью вращения с механизмом 24. Излучатель 50 энергии направляет энергию вдоль фокусирующей оси 52 в фокальный объем 54. Направление фокусирующей оси 52 разложено на направление, параллельное фронтальной плоскости 13, и направление, перпендикулярное фронтальной плоскости 13. Энергия излучается в направлении, пересекающем фронтальную плоскость 13. Ориентация излучателя 50 энергии определяет ориентацию фокусирующей оси 52, а положение излучателя 50 энергии определяет фокальный объем 54. Тело 20 подвеса может сдвигаться соответственно перемещению тела 400 подвеса и вращаться соответственно вращению тела 411 подвеса вокруг оси вращения тела 410 подвеса, при этом ось вращения 410 пересекает плоскость 1 опоры и фронтальную плоскость 13. Перемещение 400 и вращение 411 происходят в плоскости, в основном параллельной поверхности 1 опоры и фронтальной плоскости 13, и ориентированы перпендикулярно плоскости чертежа. Излучатель 50 энергии, держатель 22, рычаг 300 и механизм 24 соединены с телом 20 подвеса и перемещаются соответственно перемещению 400. Излучатель 50 энергии, держатель 22 и рычаг 300 также следуют вращению 411 тела 22 подвеса. Механизм 24 позволяет осуществлять дополнительную настройку излучателя 50 энергии и держателя 22. Дополнительная настройка накладывается на перемещение 400 и вращение 411 излучателя 50 энергии соответственно перемещению 400 и вращению 411 тела 20 подвеса. Механизм 24 соединен с блоком 5 привода передачи. В течение лечения пациента блок 5 привода передачи остается неподвижным относительно поверхности опоры. По этой причине конец механизма 24, соединенный с частью блока 5 привода передачи, также остается неподвижным относительно поверхности 1 опоры. Другой конец механизма 24 перемещается в соответствии с перемещением 400, если рычаг 300 не поворачивается вокруг точки 305 вращения, при этом рычаг 300 соединен с возможностью вращения с телом 20 подвеса. По этой причине механизм 24 может дополнительно изменять свою длину между рычагом 300 и блоком 5 привода передачи. Излучатель 50 энергии расположен на расстоянии радиуса 412 поворота от оси вращения 410. В результате поворота RS 411 вокруг оси вращения 410, излучатель 50 энергии описывает сегмент круга вокруг оси вращения 410. Конечное положение излучателя 50 относительно его положения до поворота 411 вокруг оси вращения 410 может быть описано перемещением 413 и перемещением 414. Перемещение 413 перпендикулярно плоскости чертежа и перпендикулярно срединной плоскости 12 тела 11 пациента. Перемещение 414 находится в плоскости чертежа, параллельной направлению перемещения 400. Держатель 22, рычаг 300 и механизм 24 включены во второй подблок 39 передачи. Второй подблок 39 передачи предназначен для перемещения генератора 50 энергии вдоль фокусирующей оси 52 и для поворота излучателя 50 энергии вокруг двух различных осей, перпендикулярных фокусирующей оси 52. Держатель 22 в варианте осуществления на фиг.2 содержит один рычаг 300. Если механизм 24 удлиняется, тогда как тело 20 подвеса и блок 50 привода передачи остаются неподвижными относительно поверхности 1 опоры, то конец 320 механизма рычага 300 перемещается от блока 5 в направлении, в основном параллельном 400. Рычаг 300 подвешен с возможностью вращения к телу 20 подвеса в точке 305 вращения. В результате рычаг 300 поворачивается вокруг центра вращения 305, тогда как его конец 320 механизма перемещается от приводного блока 5. Благодаря вращению рычага 300 вокруг центра вращения 305 держатель 22 передвигается в направлении поверхности 1 опоры, то есть в направлении, пересекающем фронтальную плоскость 13. Если фокальный объем 54 должен описывать перемещение, перпендикулярное к поверхности 1 опоры, в то время как ориентация фокусирующей оси 52 остается неизменной, то смещение держателя 22 не имеет компонента, параллельного поверхности 1 опоры. По этой причине рычаг 300 содержит податливую часть 307 в целях обеспечения возможности изменения расстояния между центром вращения 305 и держателем 22. Остальные средства позиционирования и ориентации излучателя 50 энергии не приведены на фиг.2, но будут описаны далее. Вышеупомянутые остальные средства могут быть включены в рычаг 300, но они также могут быть предоставлены в другом механизме держателя 22.
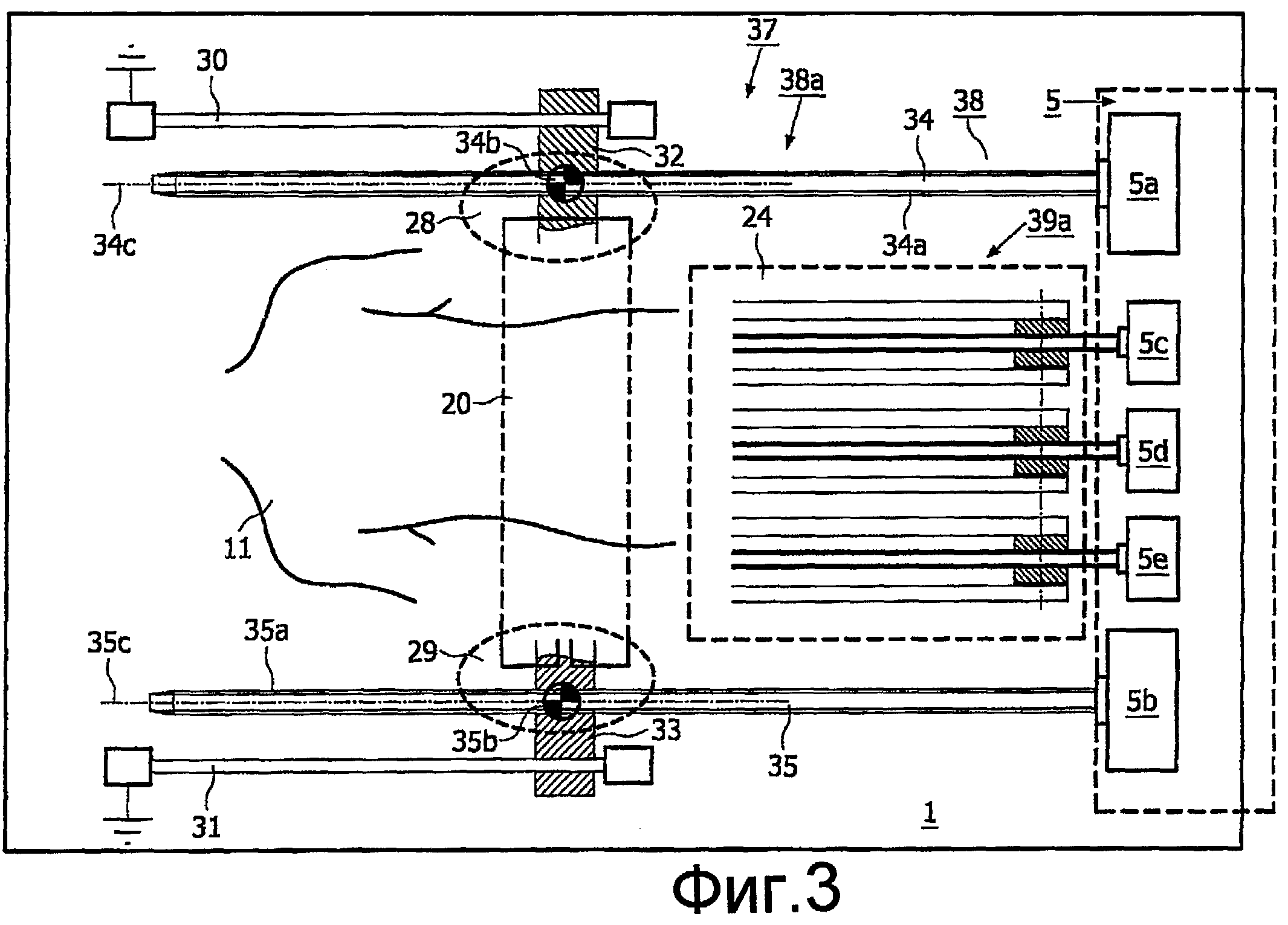
На фиг.3 показано устройство согласно изобретению в плоскости, параллельной фронтальной плоскости тела 11 пациента. Манипулятор 37 содержит блок 38а передачи манипулятора, включающий в себя тело 20 подвеса, блок 5 привода передачи, установленный на блоке 38а передачи манипулятора, и держатель 22, который не видно на фиг.3. Плоскость поперечного сечения фиг.3 параллельна поверхности 1 опоры. Блок 5 привода передачи содержит пять ведущих элементов 5а, 5b, 5c, 5d и 5е передачи. Ведущие элементы 5а и 5b передачи вставлены в первый подблок 38 передачи. Ведущие элементы 5c, 5d и 5е передачи вставлены во второй подблок 39 передачи. Блок 38а передачи манипулятора содержит как первый подблок 38 передачи, так и второй 39 подблок передачи. Механизм 24 показан частично, и вариант осуществления механизма 24 будет объясняться. Тело 20 подвеса видно частично. Излучатель 50 энергии, подвешенный к телу 20 подвеса, на Фиг.3 не виден. Тело 20 подвеса содержит удаленные части 28 и 29. Удаленные части 28 и 29 соединены с возможностью вращения с подвижно направляемыми опорами 32 и 33. Удаленная часть 28 вращается вокруг оси вращения 34b относительно подвижно направляемой опоры 32. Удаленная часть 29 вращается вокруг оси вращения 35b относительно подвижно направляемой опоры 33. Тела 34 и 35 передачи соединены с ведущими элементами 5а и 5b передачи соответственно и взаимодействуют с подвижно направляемыми опорами 32 и 33 соответственно. В варианте осуществления на фиг.3 тела 34 и 35 передачи содержат резьбовые части 34а и 35а соответственно. Каждая из резьбовых частей 34а и 35а имеет продольную ось соответственно 34с и 35с. Первый подблок 38 передачи содержит подвижно направляемые опоры 32 и 33, регуляторы 30 и 31 движения опор и тела 34 и 35 передачи. Регуляторы 30 и 31 движения опор управляют подвижно направляемыми опорами 32 и 33 и нагружены весом тела подвеса и компонентами, подвешенными к телу 20 подвеса. Регуляторы 30 и 31 движения опор неподвижны относительно поверхности опоры 1. Регуляторы 30 и 31 движения опор в варианте осуществления на фиг.3 являются удлиненными телами. Эти удлиненные тела предпочтительно должны быть жесткими с целью минимизации их деформации. Жесткие регуляторы 30 и 31 движения опор могут быть интерпретированы как настройки формы и размеров поперечного сечения регуляторов 30 и 31 движения опор с целью получения геометрически жестких тел. Однако это не всегда возможно, поскольку приводит к достаточно объемным компонентам. Могут применяться материалы, имеющие магнитные свойства, подходящие для использования в магнитном оборудовании и имеющие высокий модуль Юнга или модуль упругости. Среди керамических материалов такой вид материалов, как оксиды, содержит материалы, такие как оксид алюминия (Al2O3) и оксид цинка (ZnO), подходящие для использования в регуляторах 30 и 31 движения опор. Также могут применяться материалы из категории карбидов. Карбид кремния (SiC) является примером подходящего материала, доступного на рынке. Положение осей вращения 34b и 35b тела 20 подвеса относительно опор 32 и 33 соответственно является важным для сил и крутящих моментов, приложенных между опорами 32 и 33 и телами 34 и 35 передачи соответственно. Для геометрической жесткости является предпочтительными, если оси 34b и 35b вращения пересекаются с продольными осями 34с и 35с соответственно.
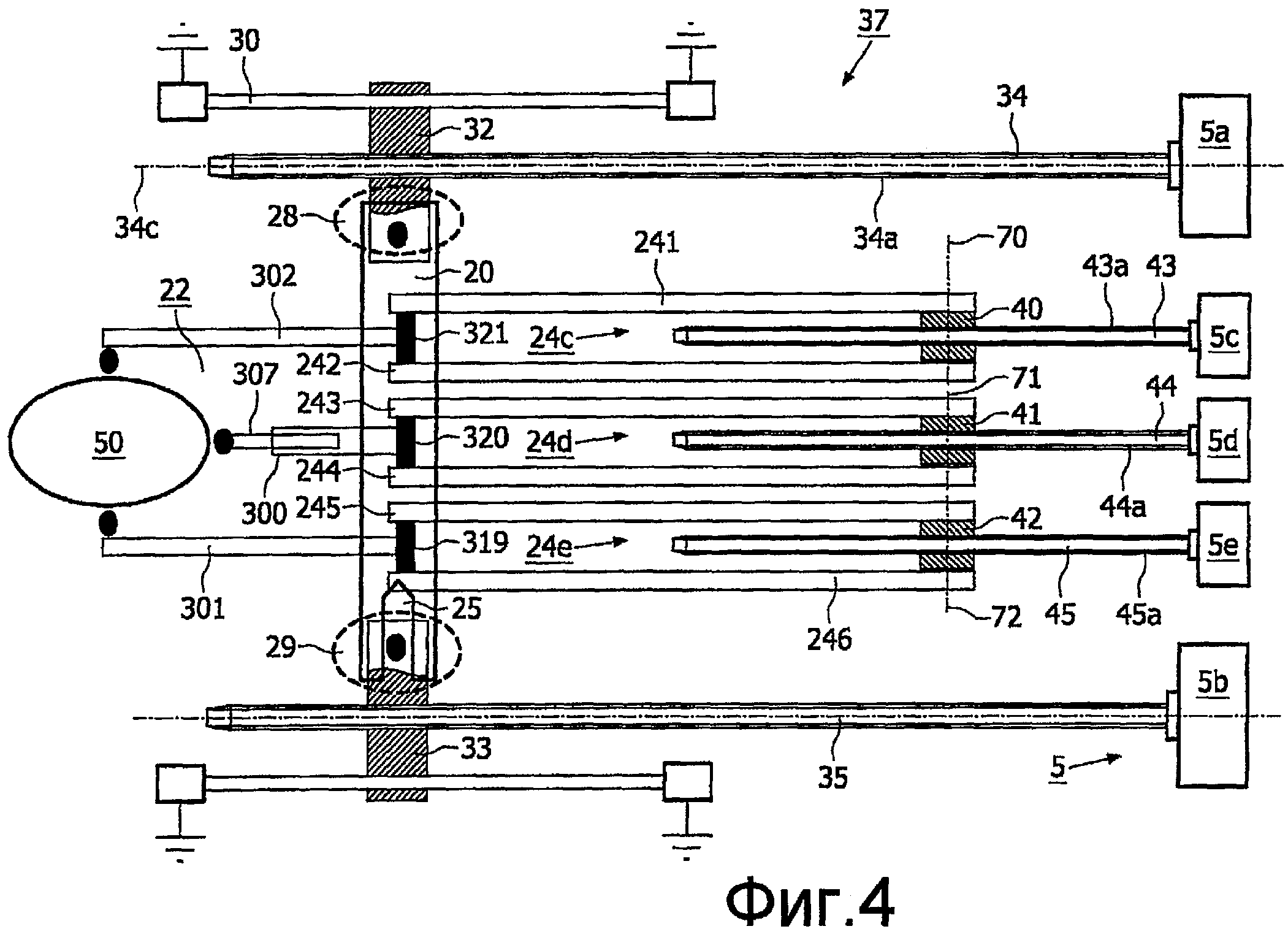
Вариант осуществления манипулятора 37 согласно изобретению схематически изображен на фиг.4 в плоскости, параллельной поверхности 1 опоры. Держатель 22 содержит три рычага 300, 301 и 302. Рычаги 300, 301 и 302 подвешены с возможностью вращения к телу 20 подвеса и соединены с возможностью вращения с тремя отдельными механизмами 24d, 24e и 24с на концах механизмов 320, 319 и 321 соответственно. Механизмы 24с, 24d и 24e содержат соединительные штанги 241-246, подвижно направляемые тела 40, 41 и 42, а также элементы 43, 44 и 45 передачи и регуляторы 46, 47 и 48 движения механизмов, не показанные на фиг.4. Элементы 43, 44 и 45 передачи содержат резьбовые части 43а, 44а и 45а. Рычаги 241-246 соединены с возможностью вращения с подвижно направляемыми телами на концах передачи. Оси вращения 70, 71 и 72 характеризуют соединение между вышеупомянутыми рычагами и подвижно направляемыми телами. Подвижно направляемые тела 40, 41 и 42 взаимодействуют с резьбовыми частями 43а, 44а и 45а вращаемых элементов 43, 44 и 45 передачи. Каждый из элементов 43, 44 и 45 передачи соединен с ведущим элементом 5с, 5d и 5е передачи соответственно. Взаимодействие между механизмами 24с, 24d и 24е и рычагами 302, 300 и 301 соответственно происходит согласно взаимодействию рычага 300 на фиг.2 с механизмом 24 на фиг.2, как объяснялось выше. Держатель 22 и излучатель 50 энергии позиционируются и ориентируются относительно тела 20 подвеса в результате смещения концов 321, 320 и 319 механизма. Для поддержания положения и ориентации держателя 22 и излучателя 50 энергии относительно тела 20 подвеса концы 321, 320 и 319 механизма вышеупомянутых рычагов должны поддерживать свое положение относительно тела 20 подвеса. Концы 321, 320 и 319 механизма зафиксированы относительно соединительных штанг 241-246 или, по меньшей мере, относительно первых концевых частей 241а-246а (показано на фиг.6) соединительных штанг 241-246, при этом вышеупомянутые соединительные штанги должны поддерживать свое положение относительно тела 20 подвеса. Если тело 20 подвеса перемещается и поворачивается в плоскости чертежа в результате поворота ведущих элементов передачи, то концы 321, 320 и 319 механизма и первые концевые части 241а-246а (фиг.6) перемещаются согласно перемещению и вращению тела 20 подвеса. Для сохранения неизменных положения и ориентации держателя 22 и излучателя 50 энергии относительно тела 20 подвеса, подвижно направляемые тела 40, 41 и 42 и вторые концевые части 241b-246b (фиг.6) соединительных штанг 241-246, размещенные вокруг осей вращения 70, 71 и 72, должны перемещаться соответственно перемещению и вращению тела 20 подвеса. По этой причине ведущие элементы 5с, 5d и 5е передачи должны компенсировать перемещение и вращение тела 20 подвеса в плоскости чертежа путем управления элементами 43, 44 и 45 передачи в случае, если положение и ориентация держателя 22 и излучателя 50 энергии относительно тела 20 подвеса должны оставаться неизменными. Таким образом, повороты ведущих элементов 5а и 5b передачи и управление первым подблоком 38 передачи связано с настройкой второго подблока 39 передачи ведущими элементами 5с, 5d и 5d передачи в случае, если положение и ориентация излучателя 50 относительно тела 20 подвеса не меняется при перемещении и повороте тела 20 подвеса.
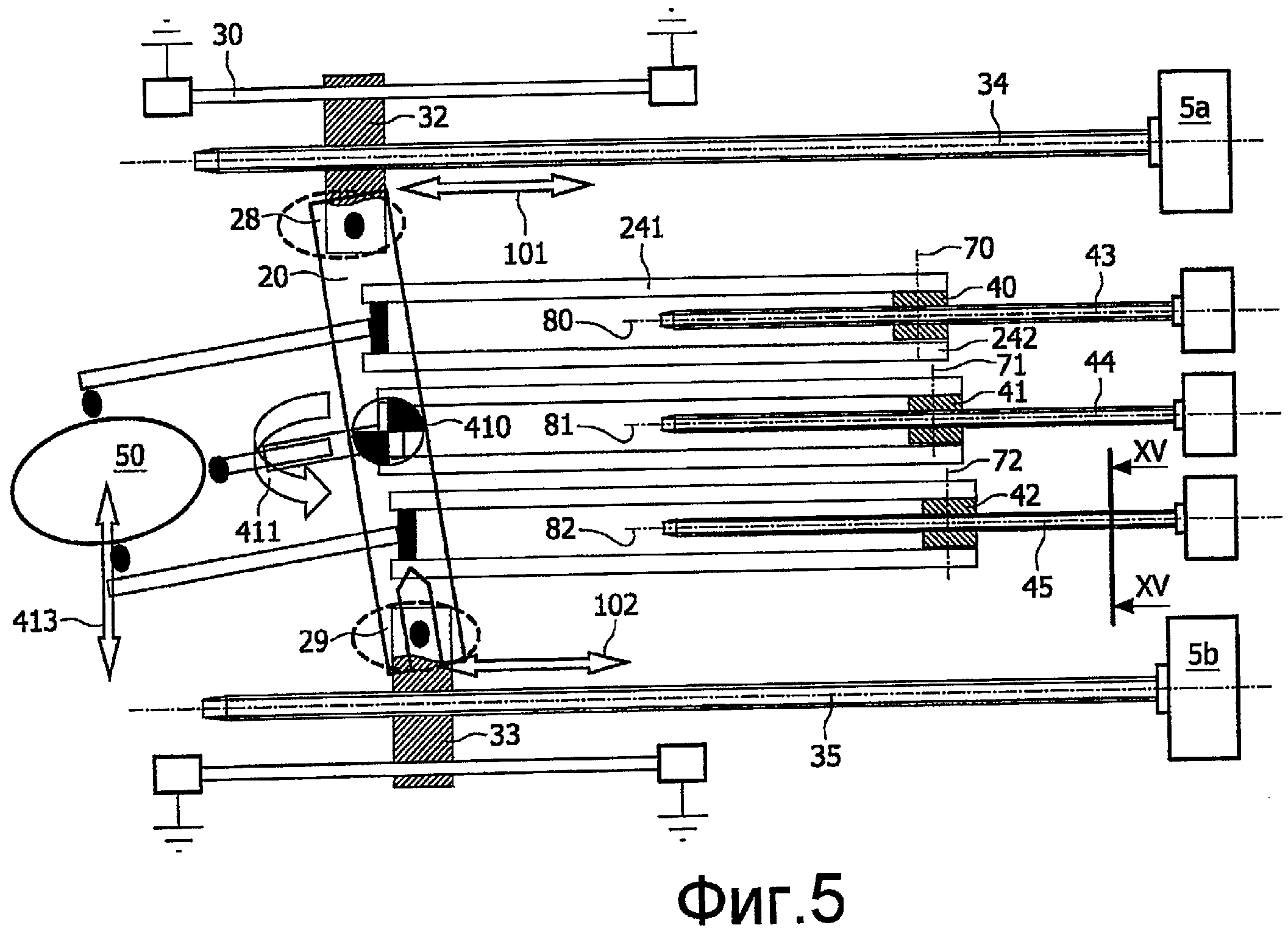
На фиг.5 схематически изображена установка тела 20 подвеса для варианта осуществления устройства согласно изобретению. Ведущий элемент 5а передачи управляет вращаемым резьбовым телом 34 передачи. Тело 34 передачи взаимодействует с подвижно направляемой опорой 32, и, в результате поворота ведущего элемента 5а передачи, подвижно направляемая опора 32 и удаленная часть 28 тела 20 подвеса перемещаются вдоль регулятора 30 движения опоры на расстояние 101. Аналогично, ведущий элемент 5b передачи вызывает перемещение удаленной части 29 тела 20 подвеса на расстояние 102. В общем случае расстояние 101 не будет равным расстоянию 102, и тело подвеса будет поворачиваться вокруг оси вращения 410. В результате данного поворота 411 вокруг оси вращения 410 излучатель 50 энергии будет позиционирован посредством перемещения 413, пересекающего регулятор 32 движения опоры, и в плоскости чертежа. Также на фиг.5 показаны элементы 43, 44 и 45 передачи. Элементы передачи примера варианта осуществления, как показано на фиг.5, содержат резьбовые части 43а, 44а и 45а (фиг.4). Каждая из резьбовых частей имеет продольную ось 80, 81 и 82. Соединительные штанги 241-246 соединены с возможностью вращения с подвижно направляемыми телами 40, 41 и 42, имеющими оси вращения 70, 71 и 72. Для геометрической жесткости является предпочтительным, чтобы продольные оси 80, 81 и 82 пересекались с осями вращения 70, 71 и 72. В этом случае механизмы 24с, 24d и 24е спроектированы как двухтактные механизмы. Силы сдвига и вращающие моменты, вызывающие значительную деформацию элементов 43, 44 и 45 передачи и создающие плохие условия взаимодействия путем наклона подвижно направляемых тел, могут быть минимизированы. Дополнительное преимущество варианта осуществления на фиг.5 заключается в том, что элемент 40 передачи нагружен симметрично посредством соединения штанг 241 и 242. Благодаря симметричному размещению соединительных штанг вокруг элемента 40 передачи минимизируются изгибающие моменты в элементе 40 передачи и деформация элемента 40 передачи. Симметричное размещение штанг 241 и 242 вокруг оси 80 предотвращает наклон подвижно направляемого тела 40 вокруг оси наклона, перпендикулярной плоскости, проходящей через оси 70 и 80. То же самое относится к топологии элементов 41 и 42 передачи относительно соединительных штанг, прикрепленных к элементам 41 и 42 передачи. И в этом случае гистерезис минимизируется в целях достижения хорошей точности позиционирования.
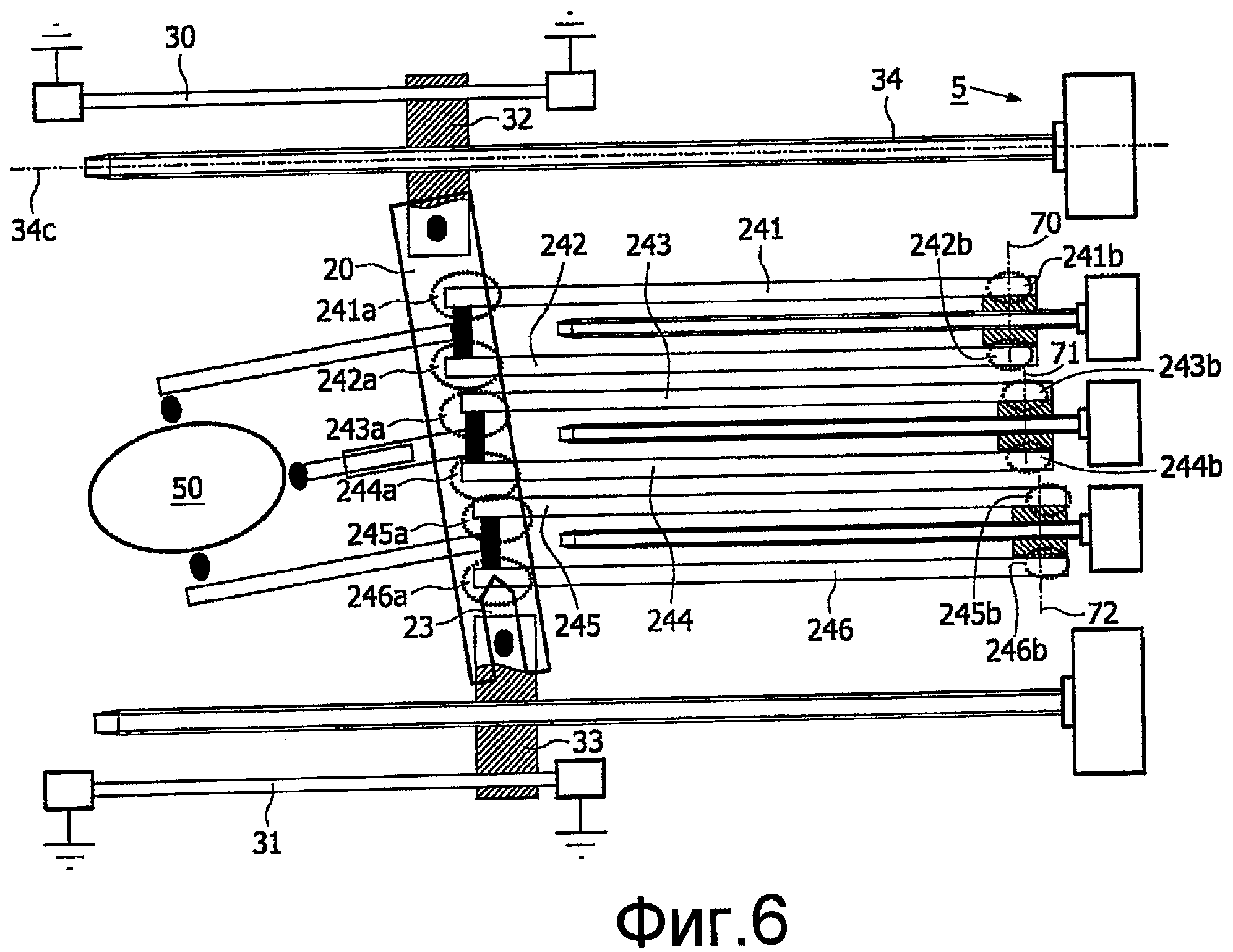
В варианте осуществления согласно изобретению, схематически изображенном на фиг.6, взаимное влияние между положением соединяющих штанг 241-246, с одной стороны, и положением подвижно направляемых опор 32 и 33, с другой стороны, проиллюстрировано для другого положения и вращения тела 20 подвеса. И в этом случае предполагается, что положение и ориентация генератора 50 энергии относительно тела 20 подвеса такое же, как и на фиг.4 и фиг.5, что подразумевает такое же, как и на фиг.4 и фиг.5, положение соединительных штанг 241-246 (и, в частности, первых концевых частей 241а-246а вышеупомянутых штанг 241-246) относительно тела 20 подвеса. Тело 20 подвеса размещено близко к блоку 5 привода передачи. Вторые концевые части 241b-246b соединяющих штанг 241 и 242 находятся практически в своих крайних положениях в целях корректировки положения тела 20 подвеса вдоль регуляторов 30 и 31 движения опор. Тело 20 подвеса вращается относительно продольной оси 34с тела 34 передачи. В целях компенсации этого вращения оси 70, 71 и 72 вращения соединяющих штанг 241-246 не выровнены. Тело 20 подвеса соединено с возможностью вращения с подвижно направляемыми опорами 32 и 33. Расстояние между подвижно направляемыми опорами 32 и 33 изменяется соответственно вращению тела 20 подвеса. Паз 23 сделан в теле 20 подвеса для обеспечения возможности изменения расстояния и для обеспечения свободного от напряжения вращения тела 20 подвеса.
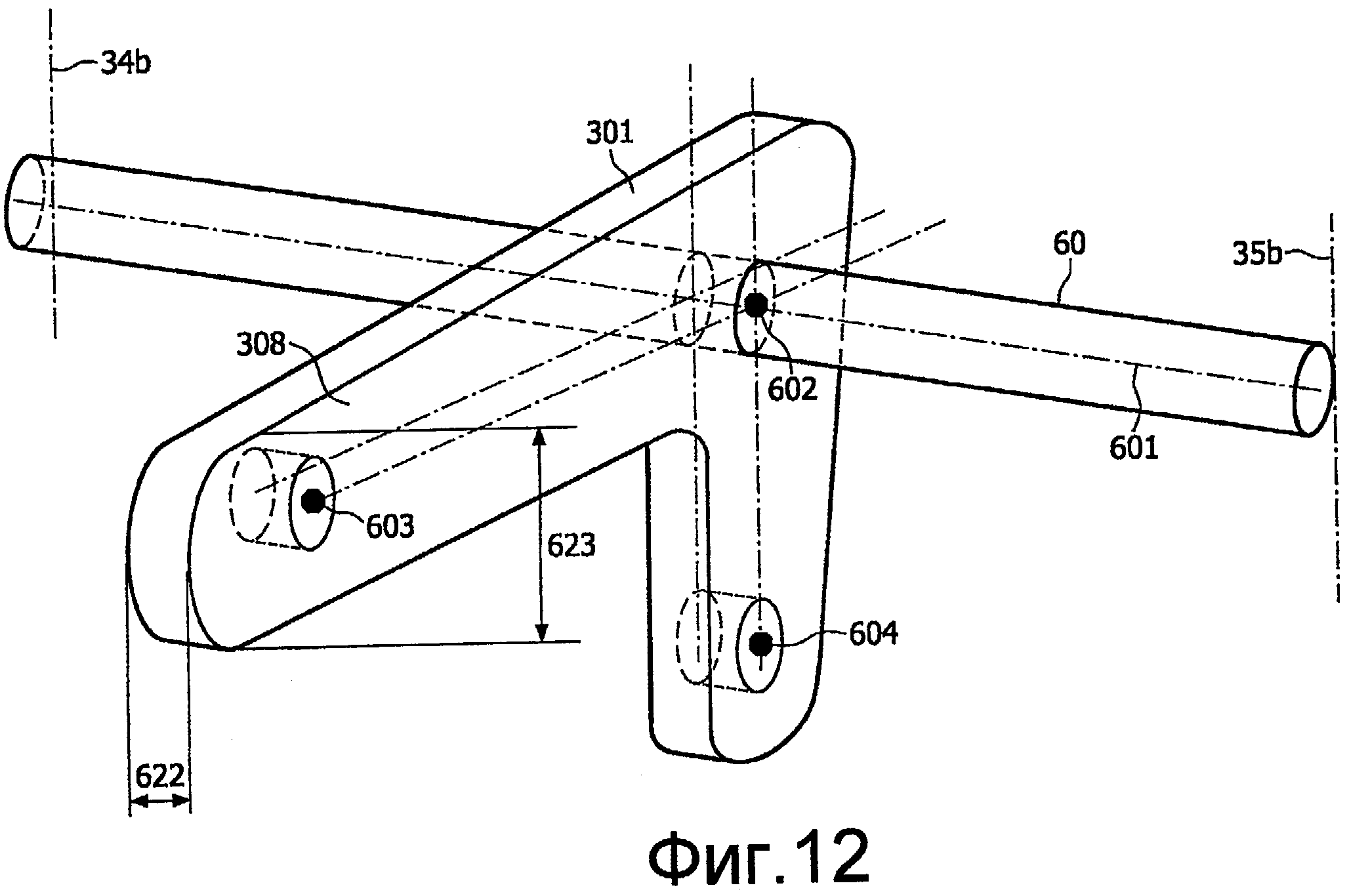
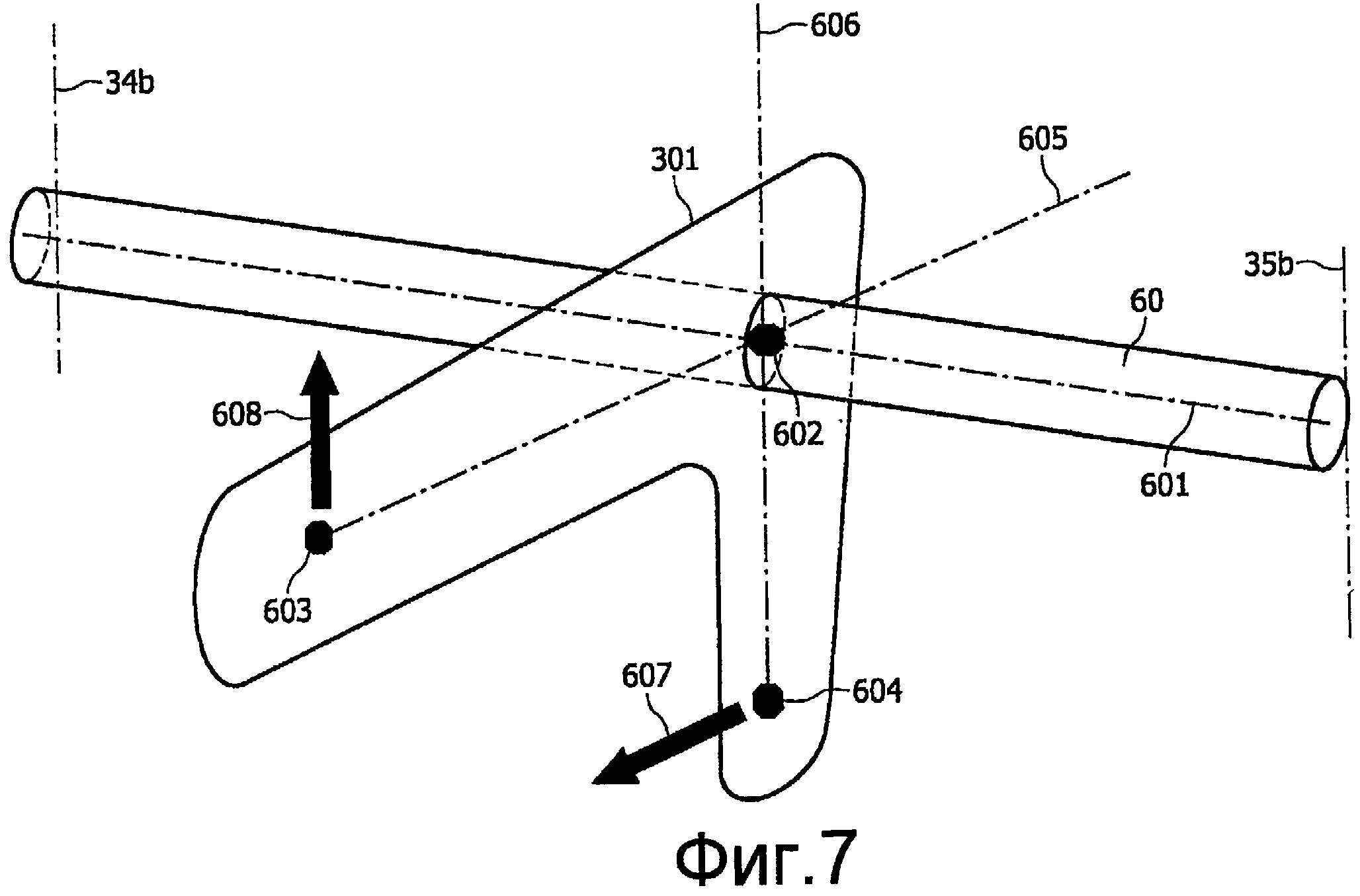
Вариант осуществления рычага 301 или 302, который включен в держатель 22 как указано на фиг.4, схематически изображен на фиг.7 посредством вида в поднятом состоянии. Рычаг 301 (или 302) подвешен с возможностью вращения к валу 60 с продольной осью 601. Вал 60 неподвижен относительно осей вращения 34b и 35b (см. также фиг.3), которые являются осями вращения тела 20 подвеса относительно подвижно направляемых опор 32 и 33 (не показаны на фиг.7). Рычаг 301 подвешен с возможностью вращения к телу подвеса таким образом, что он может вращаться вокруг точки 602 вращения на оси 601 вращения, которая является продольной осью вала 60. Рычаг 301 имеет еще две характеристические точки или концы 603 и 604 рычага, при этом концы рычага отличны от точки 602 вращения. На концах рычага, рычаг 301 соединен с другими компонентами. Один конец 603 рычага 301 соединен с возможностью вращения с излучателем 50 (не показан на фиг.7), тогда как другой конец 604 соединен с возможностью вращения с соединительными штангами 245 и 246 механизма 24е (не показан на фиг.7). Конец рычага, соединенный с излучателем 50, будет называться концом 603 излучателя. Конец рычага 301, соединенный с механизмом 24е, содержащемся во втором подблоке 39 передачи, будет называться концом 604 механизма. Прямая 605 соединяет конец 603 излучателя и точку 602 вращения. Прямая 606 соединяет конец 604 механизма и точку 602 вращения. Рычаг 301 установлен таким образом, что прямая 605 перпендикулярна прямой 606. Ось 601 вращения ориентирована таким образом, что она перпендикулярна прямым 605 и 606. В оставшейся части данного параграфа предполагается, что прямая 606 в основном перпендикулярна поверхности 1 опоры (не показана на фиг.7) или пересекает ее. Таким образом, поверхность 1 опоры в основном параллельна плоскости, задаваемой осью 601 вращения и прямой 605. В оставшейся части данного параграфа перемещения и повороты предполагаются небольшими. Соединительные штанги 245 и 246 могут вызывать перемещение 607 конца 604 механизма. Перемещение 607 параллельно прямой 605 и в основном параллельно поверхности 1 опоры. Поскольку рычаг 301 является жестким, то перемещение 607 преобразуется в перемещение 608 конца 603 излучателя. Перемещение 608 параллельно прямой 606 и в основном перпендикулярно поверхности 1 опоры или пересекает ее. Таким образом, можно сделать вывод о том, что рычаг 301 переводит перемещение 607 конца 604 механизма в перемещение 608 конца 603 излучателя, при этом перемещение 607 имеет компонент, который перпендикулярен перемещению 608.
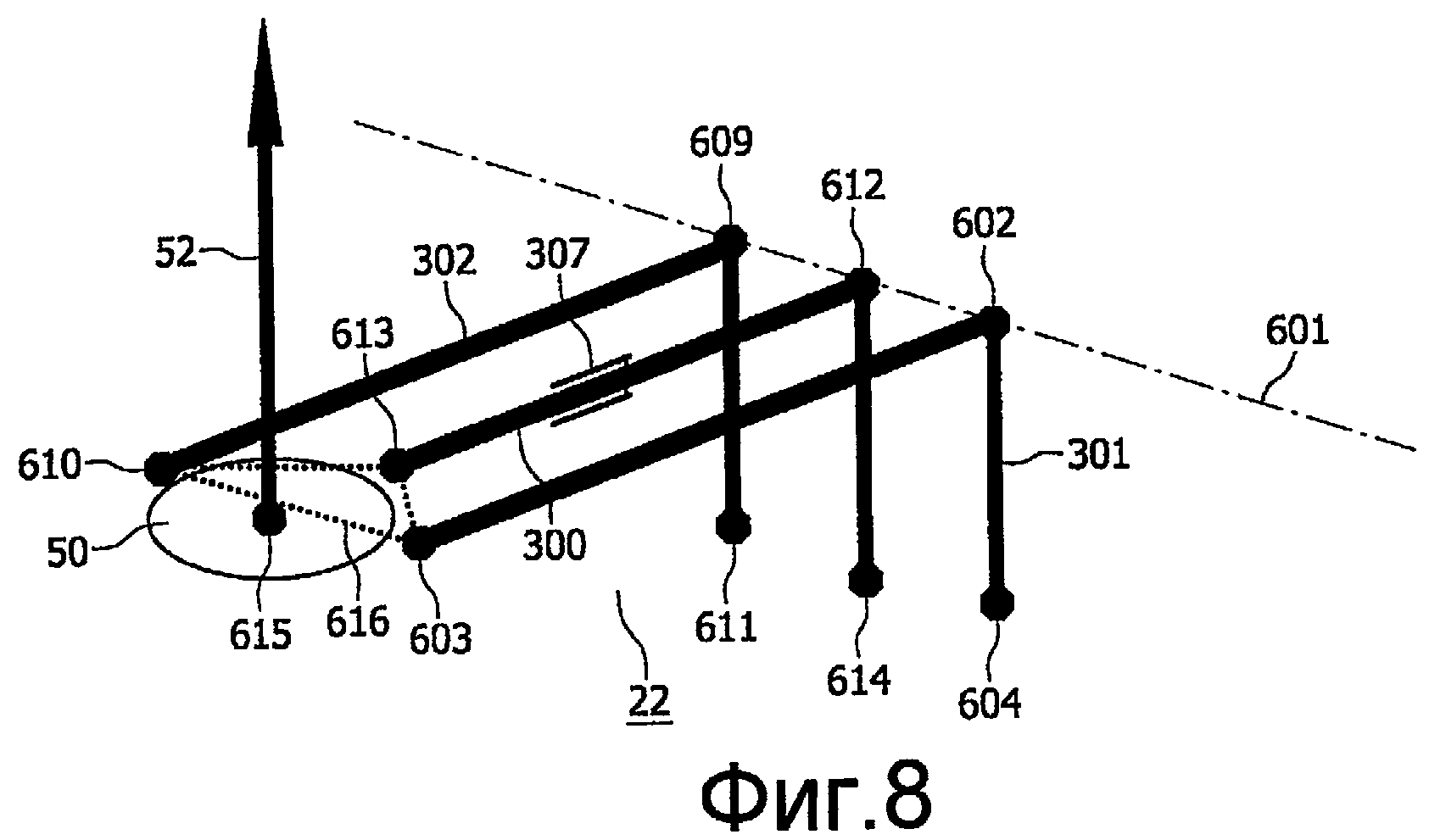
В варианте осуществления держателя 22 согласно изобретению, как схематически показано на фиг.8, держатель 22 содержит три рычага 300, 301 и 302. Рычаги 300, 301 и 302 содержат концы 613, 603 и 610 излучателя соответственно и концы 614, 604 и 611 механизма. Рычаги 300, 301 и 302 имеют ось вращения 601, параллельную поверхности 1 опоры, в качестве общей оси вращения. Рычаги 300, 301 и 302 могут вращаться вокруг точек 612, 602 и 609 вращения соответственно. Размещение и функционирование рычагов 300, 301 или 302 аналогично описанному согласно фиг.7. Однако рычаг 300 имеет устройство изменения длины или податливую часть 307, что описывалось для фиг.2. Центр поворота 305, указанный на фиг.2, соответствует точке 612 вращения и оси 601 вращения, что указано на фиг.6. Податливая часть 307 изменяется вдоль прямой, соединяющей конец 613 излучателя и точку 612 вращения. На фиг.6 также показаны излучатель 50 энергии и фокусирующая ось 52. Излучатель 50 энергии может, например, быть прикреплен к рычагам 300, 301 и 302 посредством сферических шарниров. Фокусирующая ось пересекает поверхность излучателя 50 энергии в точке 615 поверхности излучателя. Концы 603, 610 и 613 излучателя вместе образуют треугольник 616. Излучатель энергии прикреплен к рычагам 300, 301 и 302 на концах 603, 610 и 613 излучателя. Излучатель 50 энергии является твердым телом. По этой причине треугольник 616 сохраняет свою форму независимо от ориентации рычагов 300, 301 и 302. Фокусирующая ось 52 перпендикулярна треугольнику 616. На фиг.8 держатель 22 и генератор 50 энергии показаны в исходном состоянии относительно поверхности 1 опоры. В исходном состоянии треугольник 616 параллелен поверхности 1 опоры, а фокусирующая ось 52 пересекает плоскость 1 опоры. Концы 610, 613 и 603 излучателя могут перемещаться в направлении, параллельном направлению фокусирующей оси 52, путем поворота рычагов 302, 300 и 301 соответственно.
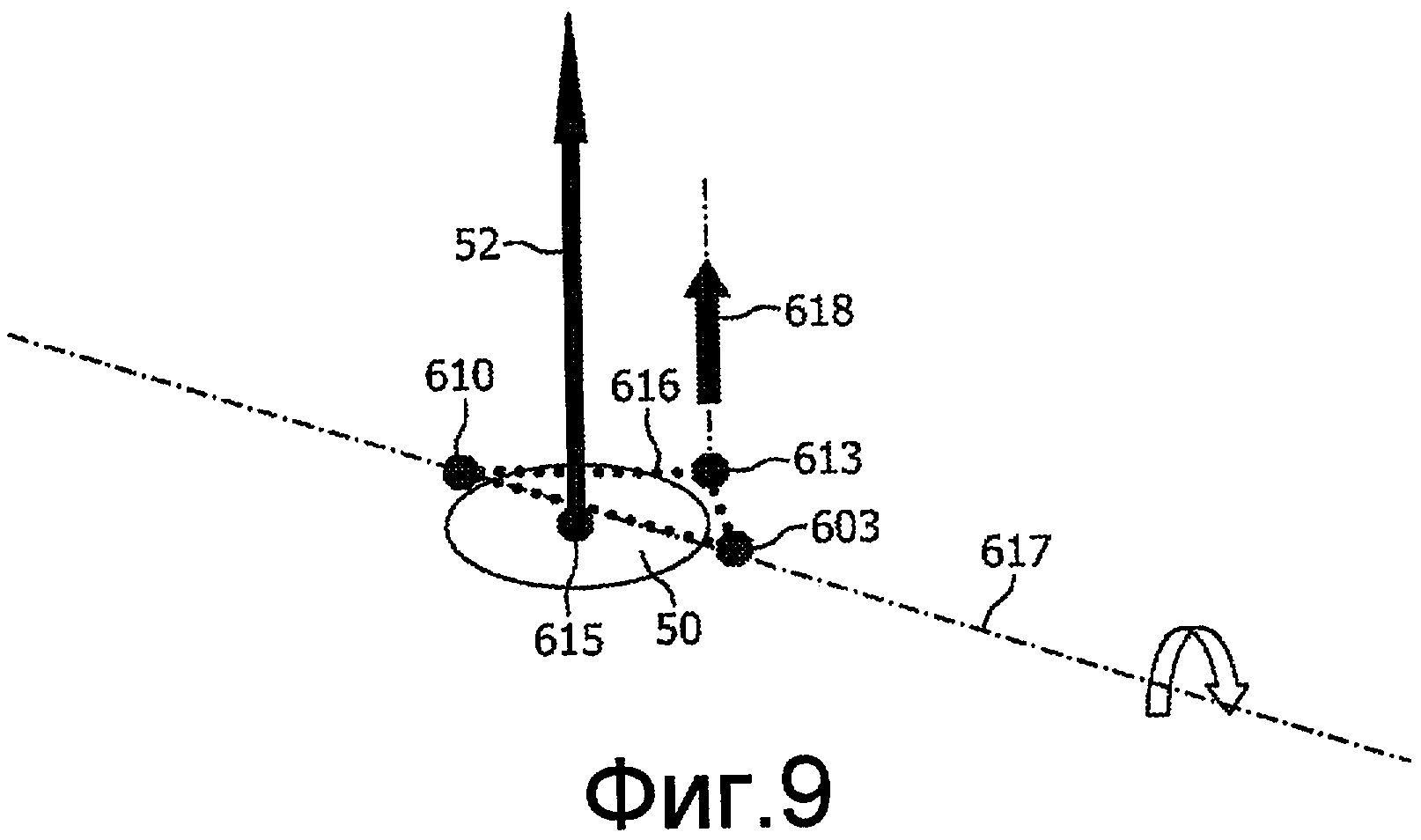
На фиг.9 показана деталь варианта осуществления, описанного на фиг.8. Предполагается, что концы 603 и 610 излучателя не перемещаются и что рычаги 301 и 302, с которыми соединены эти концы (фиг.8), не вращаются, то есть рычаги 301 и 302 остаются в своем исходном состоянии. Вращение рычага 300 вокруг оси вращения 601 (фиг.8) вызовет небольшое перемещение или смещение 618 конца 613 излучателя. В действительности, конец 613 излучателя описывает небольшой круговой сегмент вокруг оси вращения 617. Направление этого смещения 618 параллельно фокусирующей оси 52 генератора 50 энергии. В результате треугольник 616 и излучатель 50 будут вращаться вокруг первой оси вращения 617 излучателя. Концы 603 и 610 излучателя остаются в исходном положении относительно оси 601 вращения (фиг.8). Вращение излучателя 50 энергии вокруг оси вращения 617 вызовет увеличение расстояния между точкой 612 вращения (неподвижной относительно тела 20 подвеса) и концом 613 излучателя (фиг.8). По этой причине рычаг 300 содержит податливую часть 307 (фиг.8).
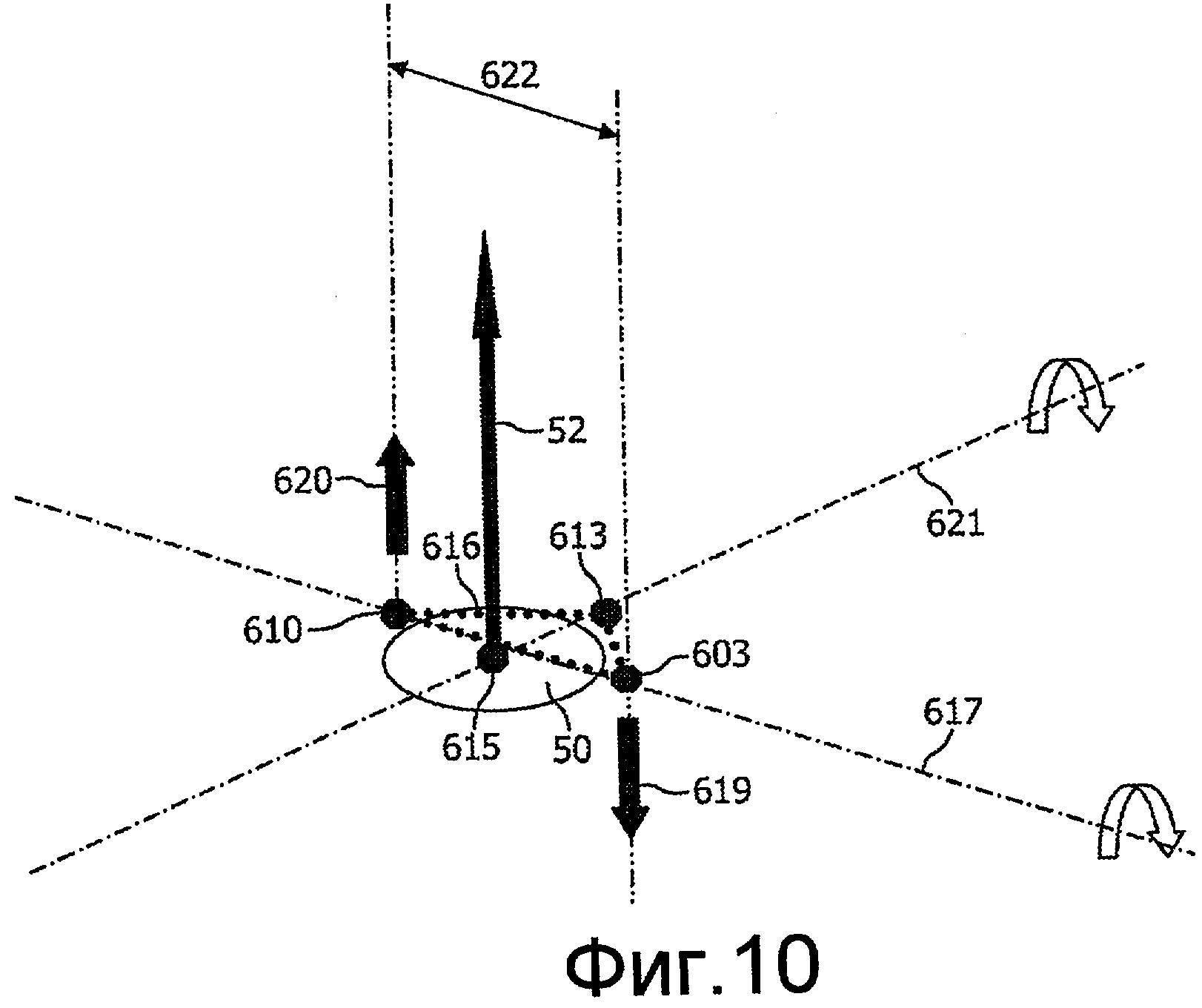
На фиг.10 показана деталь варианта осуществления, описанного на фиг.8. Предполагается, что конец 613 излучателя не перемещается и что рычаг 300, с которым соединен этот конец (фиг.8), не вращается, но при этом рычаг 300 все еще находится в своем исходном состоянии. Противоположные повороты одинаковой амплитуды идентичных рычагов 301 и 302 вокруг оси вращения 601 (фиг.8) вызовут противоположные смещения 619 и 620 одинаковой величины концов 603 и 610 излучателя соответственно. Направление вышеупомянутых смещений 619 и 620 параллельно направлению фокусирующей оси 52 генератора 50 энергии. В результате треугольник 616 и излучатель 50 будут вращаться вокруг второй оси вращения 621 излучателя. Рычаги 300, 301 и 302 могут вращаться вокруг точек 612, 602 и 609 вращения соответственно (фиг.8). Точки 612, 602 и 609 вращения находятся на оси 601 вращения (фиг.8). Вторая ось вращения 621 проходит через точку 612 вращения, поскольку рычаг 300 не поворачивается из своего исходного состояния, и плоскость треугольника 616 содержит вторую ось 621. Точки 610 и 603 излучателя сохраняют свое расстояние 622, поскольку они прикреплены к жесткому излучателю 50 энергии. После поворота излучателя 50 энергии вокруг второй оси вращения 621 проекция расстояния 622 на ось 601 вращения вдоль направления перпендикуляра к оси 601 вращения становится короче, чем расстояние между точками 602 и 609 вращения (фиг.8) в исходном состоянии. Данный эффект вызывает деформацию рычагов 301 и 302 (фиг.8). Концы 610 и 603 излучателя рычагов 301 и 302 изгибаются в направлении друг друга в результате вращения вокруг второй оси вращения 621. Данная деформация может вызвать повреждение генератора 50 энергии, поскольку изгибающие силы и моменты вносятся в результате деформации рычагов 301 и 302. Для поглощения этой деформации рычаги должны быть эластичными в направлении деформации, которым является направление, перпендикулярное второй оси вращения и параллельное поверхности 1 опоры в исходном состоянии держателя 22.
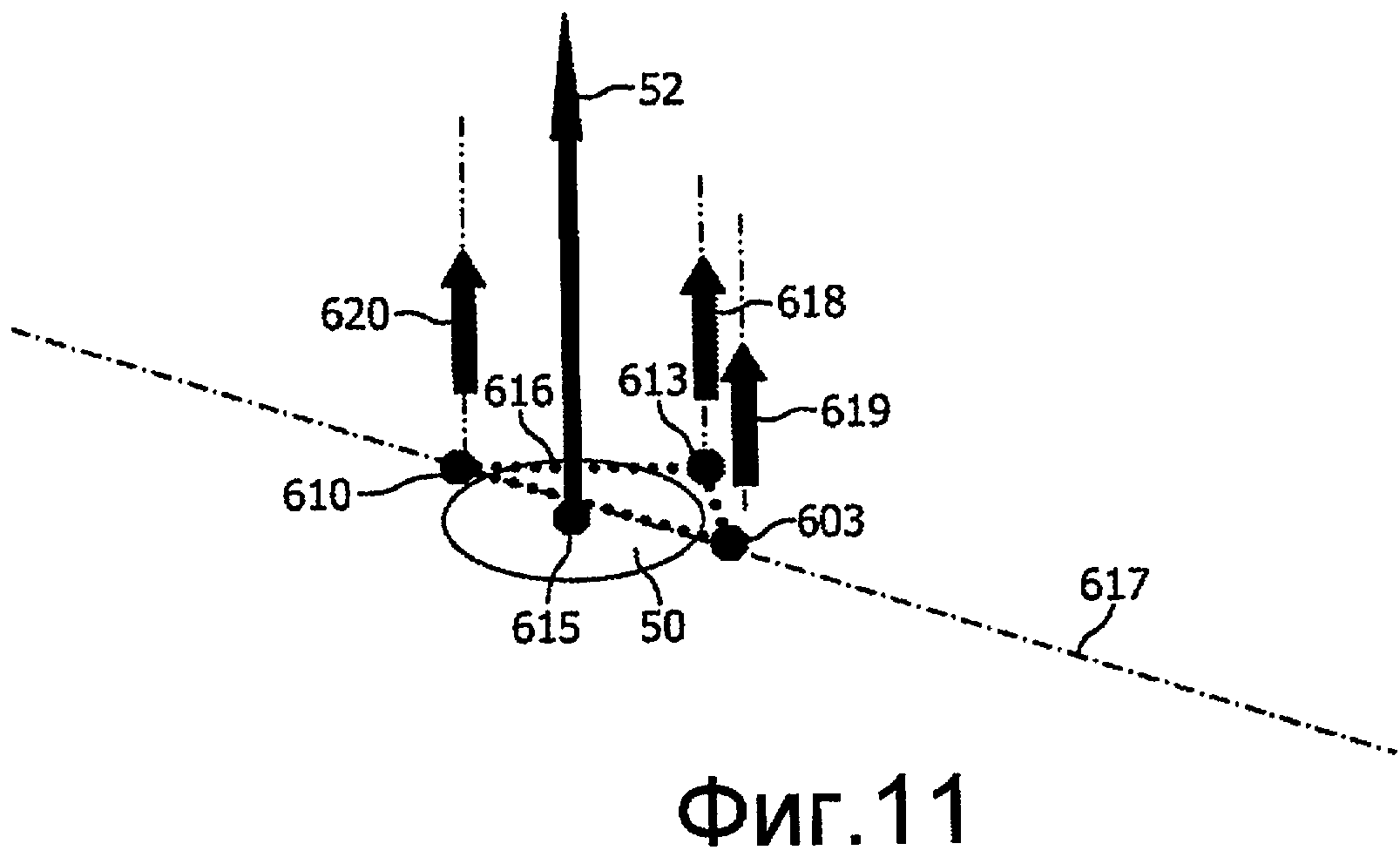
На фиг.11 показана деталь варианта осуществления, описанного на фиг.8. Если рычаги 300, 301 и 302 поворачиваются таким образом, что вызываемые ими перемещения 618, 619 и 620 концов 613, 603 и 610 излучателя являются равными и происходят в одном направлении, то излучатель 50 энергии перемещается вдоль фокусирующей оси 52. Относительно тела 20 подвеса и оси 601 вращения (фиг.8), причем излучатель 50 энергии описывает сегмент круга, при этом сохраняя свою ориентацию относительно тела 20 подвеса.
На фиг.12 схематически изображен вариант осуществления рычага 301. Рычаг 301 податлив в направлении оси 601 вращения и является жестким в направлении осей 34b и 35b, проходящих через удаленные части 28 и 29 тела 20 подвеса (фиг.3). Рычаг 301 также является жестким в направлении, перпендикулярном осям 601 и 34b. Распределение жесткости определяется, например, высотой 623 и толщиной 622 рычага 301. Рычаг 301, как схематически показано на фиг.12, содержит часть 308. Часть 308 эластична в направлении, параллельном оси 601. В целях достижения эластичности рычага 301 вдоль направления оси 601 вращения, точка 602 вращения может быть реализована в виде перемещаемого шарнира вдоль оси 601.
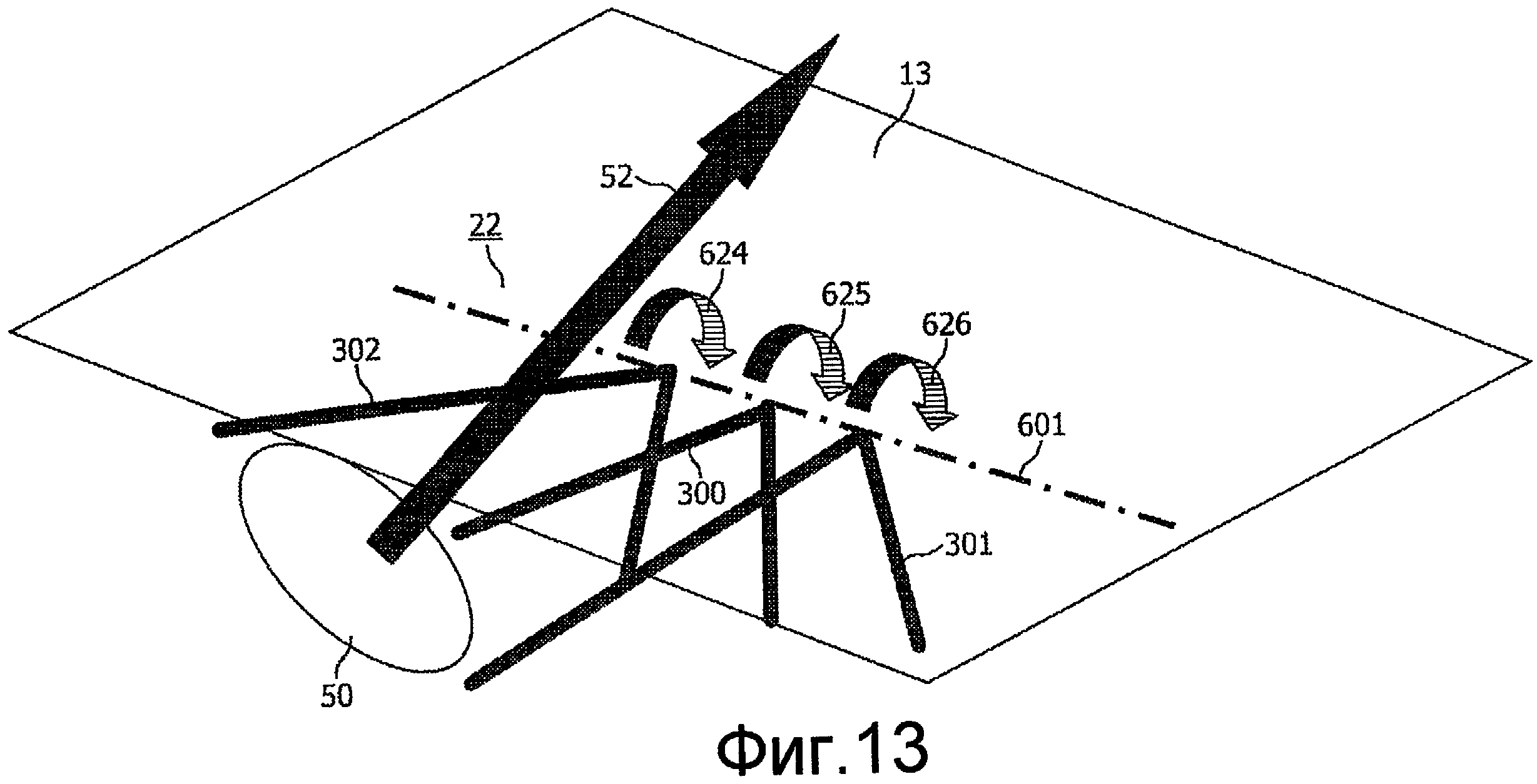
В варианте осуществления держателя 22 согласно изобретению, как схематически показано на фиг.13, держатель 22 содержит три рычага 300, 301 и 302. С помощью поворотов 624, 625 и 626 рычагов 300, 301 и 302 излучатель 50 энергии и фокусирующая ось 52 позиционируются и ориентируются относительно фронтальной плоскости 13.
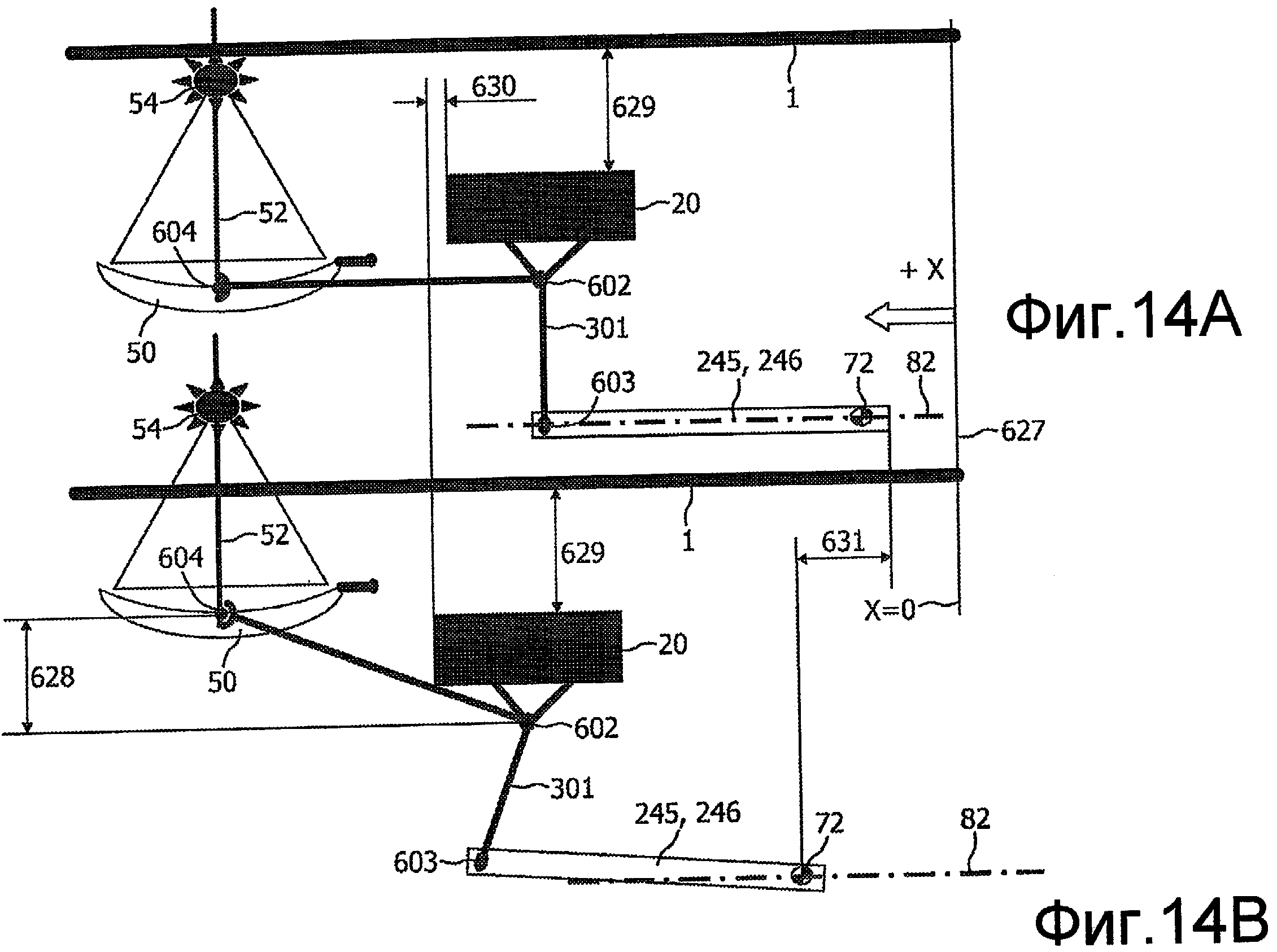
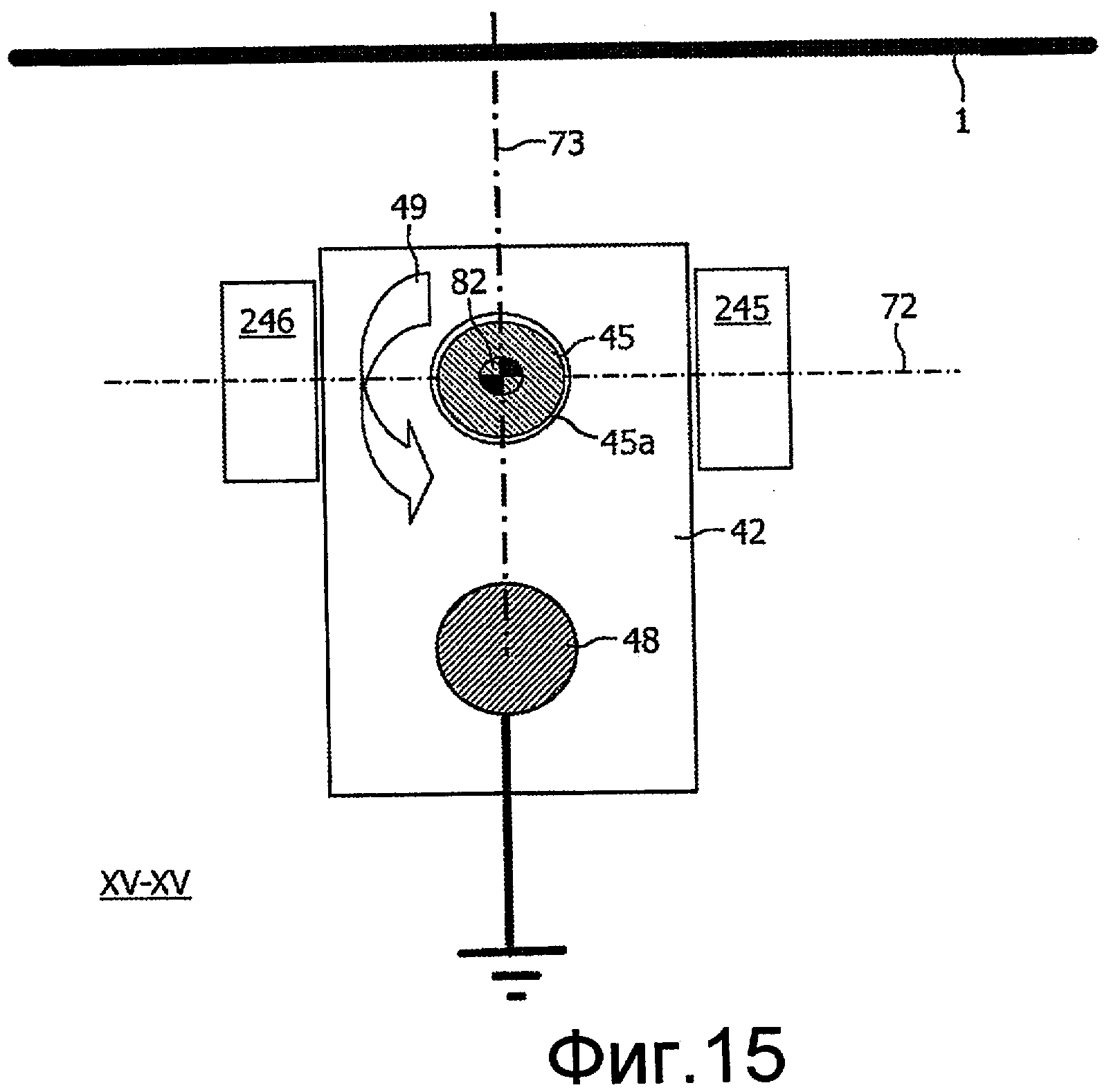
На фиг.14а показана деталь варианта осуществления согласно изобретению, как описано на фиг.8, в своем исходном состоянии относительно поверхности 1 опоры и относительно оси координат Х=0 627, перпендикулярной поверхности 1 опоры, на фиг.14b показана та же деталь, что и на фиг.14а, но в состоянии, отличном от исходного состояния. Излучатель 50 энергии и фокусирующая ось 52, показанные на фиг.14а, имеют ту же ориентацию относительно поверхности 1 опоры и тела 20 подвеса, что и показанные на фиг.14b. Единственное различие между излучателями 50 энергии на фиг.14а и фиг.14b состоит в том, что положение излучателя 50 энергии относительно тела 20 подвеса и поверхности 1 опоры сдвинуто посредством вертикального перемещения 628 излучателя 50 энергии. В направлении, параллельном поверхности 1 опоры, и в плоскости чертежа, обозначенной как Х-направление, излучатель 50 энергии не перемещается, и расстояние от фокального объема 54 до оси координат 627, показанное на фиг.14а, то же самое, что и на фиг.14b. В целях осуществления вертикального перемещения 628 излучателя 50 энергии, рычаг 301 поворачивается вокруг вращения 602. Точка 602 вращения неподвижна относительно тела 20 подвеса, и расстояние по вертикали между телом подвеса и поверхностью 629 опоры постоянно, поскольку регуляторы движения опор остаются неподвижными и параллельными поверхности опоры (см. описание фиг.3). Рычаг 301 является жестким, поэтому расстояние между точкой 602 вращения и концом 604 излучателя остается неизменным при повороте рычага 301. По этой причине тело 20 подвеса должно быть передвинуто параллельно направлению Х на корректирующее расстояние 630. В результате происходит сдвиг и переориентация соединительных штанг 245 и 246. Соединительные штанги соединены с возможностью соединения с концом 603 механизма рычага 301 и соединены с возможностью соединения с подвижно направляемым телом 45 с осью вращения 72. Ось вращения 72 пересекает продольную ось 82 резьбовой части 45а (фиг.4) элемента 45 передачи (фиг.4). Положение и ориентация продольной оси 82 зафиксированы относительно поверхности 1 опоры. Вследствие этого соединительные штанги 245 и 246 совместно перемещаются и поворачиваются при повороте рычага 301. Движение соединительных штанг 245 и 246 обусловлено ограничением, а именно, тем, что один конец соединительных штанг 245 и 246 соединен с возможностью вращения с концом 603 механизма рычага 301 и поворачивается вокруг точки 604 вращения, тогда как другой конец соединен с возможностью вращения с подвижно направляемым телом 42 в точке на оси 72 и перемещается вдоль направления оси 82. Перемещение 631 оси поворота 72 штанги относительно подвижно направляемого тела 42 показано на фиг.14. Ведущий элемент 5е передачи осуществляет перемещение 631, тогда как ведущие элементы 5а и 5b передачи осуществляют перемещение тела 630 подвеса. Таким образом, проиллюстрировано, что перемещение излучателя 50 энергии в направлении поверхности 1 опоры и соответствующее изменение положения фокального объема 54 могут быть осуществлены посредством совместного и скоординированного действия нескольких ведущих элементов 5а, 5b и 5с передачи. Регулятор 48 механизма, как схематически показано на фиг.15, предотвращает вращение подвижно направляемого тела 42 вокруг продольной оси 82.
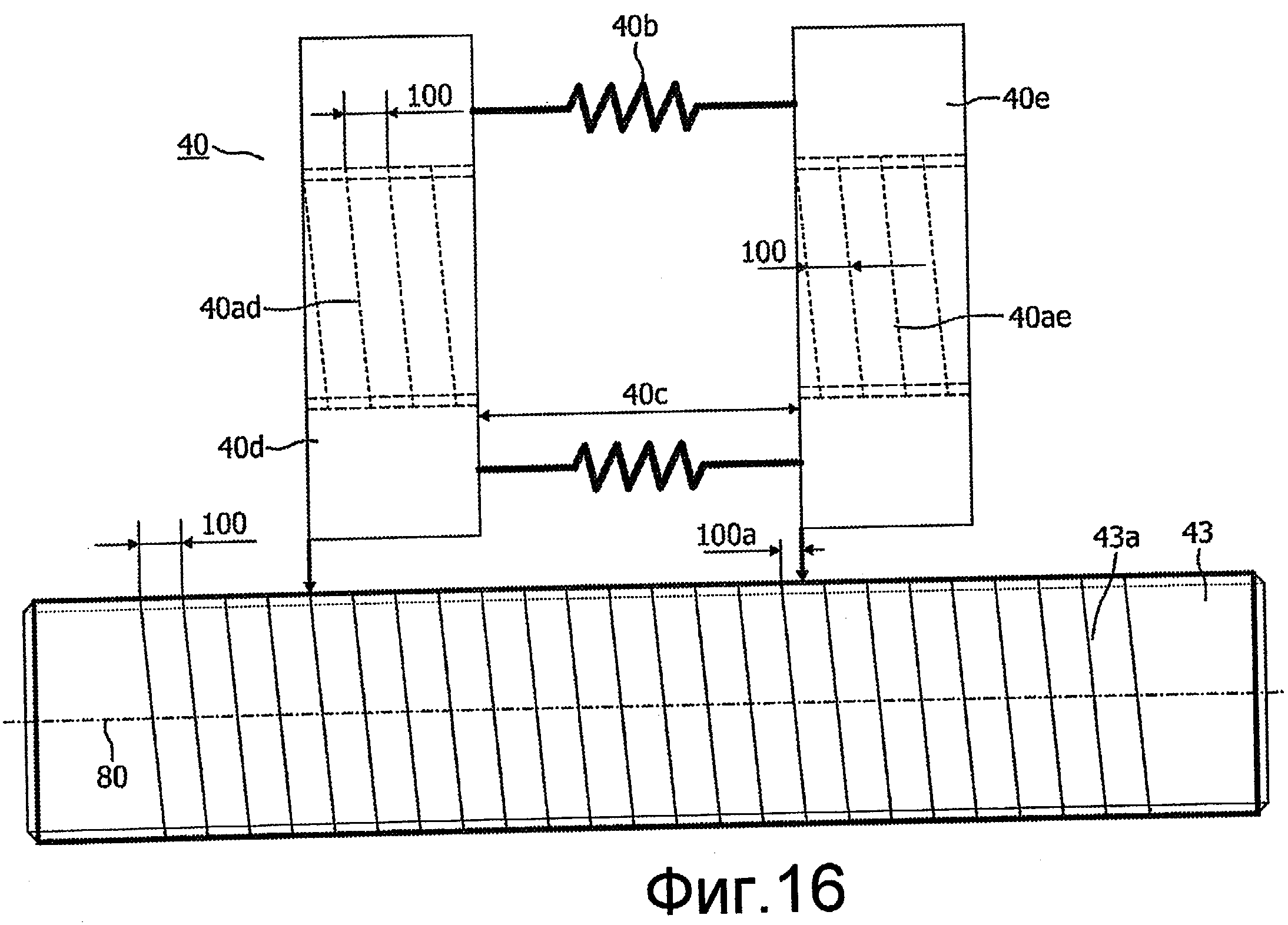
На фиг.15 схематически показан вариант осуществления части второй передачи. Поперечное сечение, приведенное на фиг.15, выполнено согласно виду XV-XV, показанному на фиг.5. Соединительные штанги 245 и 246 соединены с возможностью вращения с подвижно направляемым телом 42. Ось вращения 72 пересекается с продольной осью 82 резьбовой части 45а вращаемого элемента 45 передачи. Трение между резьбовой частью 45а элемента 45 передачи и взаимодействующей внутренней частью подвижно направляемого тела 45 прилагает момент 49 трения на подвижно направляемое тело 45 вокруг продольной оси 82 его резьбовой части 45а. Регулятор 48 механизма предотвращает вращение подвижно направляемого тела 42 в соответствии с моментом 49 трения. Регулятор 48 механизма параллелен поверхности 1 опоры. В варианте осуществления на фиг.15 телом 42 управляет только один регулятор 48 механизма. В целях достижения даже более высокой жесткости второго блока передачи может использоваться несколько регуляторов. Соединительные штанги 245 и 246 расположены симметрично вокруг подвижно направляемого тела 42 и продольной оси 82 с целью предотвращения изгиба элемента 45 передачи и наклона подвижно направляемого тела 45 вокруг оси 73 наклона. Ось 73 наклона перпендикулярна поверхности 1 опоры и оси вращения 72. Аналогично, для предотвращения вращения подвижно направляемых тел 40 и 41 могут быть предусмотрены регуляторы 47 и 48 механизмов соответственно (не показаны). На фиг.16 схематически изображен вариант осуществления подвижно направляемого тела 40 второго подблока передачи. Подвижно направляемое тело 40 показано отсоединенным от вращаемого резьбового элемента 43 передачи. В собранном состоянии подвижно направляемое тело 40 может быть перемещено посредством поворота элемента 43. Подвижно направляемое тело 40 содержит эластичную часть 40b и две жесткие части 40d и 40е. Жесткие части 40d и 40е обеспечиваются внутренней резьбой 40ad и 40ае соответственно. Внутренняя резьба 40ad и 40ае соответствует резьбовой части 43 вращаемого элемента 43 передачи. Резьба 40ad, 40ае и 43а обеспечивается соответствующим шагом 100. Эластичная часть 40b подвижно направляемого тела 40 имеет длину 40с в состоянии, в котором подвижно направляемое тело не прикреплено к элементу 43 передачи. Длина 40с эластичной части 40b отличается на расстояние 100а от нуля или более целых шагов 100. По этой причине эластичная часть 40b будет деформироваться на расстояние, по меньшей мере, 100а в случае, когда она прикреплена к элементу 43 передачи в сжатом состоянии. Эластичная часть 40b также может расширяться, по меньшей мере, на длину шага 100 минус расстояние 100а. Большее предварительное натяжение может быть введено посредством сжатия или расширения эластичной части 40b на более чем один шаг 100. Предварительное натяжение может быть внесено в любом месте устройства в соответствии с вариантом осуществления, показанном на фиг.16.
Хотя изобретение было проиллюстрировано и детально описано с помощью чертежей и предшествующего описания, такие иллюстрации и описание должны рассматриваться как иллюстративные и в качестве примера, но не как ограничивающие; изобретение не ограничивается описанными вариантами осуществления. Другие вариации описанных вариантов осуществления будут поняты и осуществлены квалифицированными специалистами в данной области техники при практическом применении заявляемого изобретения на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово "содержит" не исключает других элементов или шагов, а единственное число не исключает возможности множественного. Единственный механизм или блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Факт перечисления определенных мер во взаимно различных зависимых пунктах формулы изобретения сам по себе не указывает на то, что комбинация этих мер не может использоваться с выгодой. Любые знаки ссылок в формуле изобретения не должны интерпретироваться как ограничивающие его область.
Устройство, содержащее, по меньшей мере, тело и амортизатор, и робот-пылесос, содержащий такое устройство
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

