Результат интеллектуальной деятельности: РУЧКА УПРАВЛЕНИЯ С МЕХАНИЗМОМ ПОДАЧИ УСТРОЙСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к катетерам, в частности к электрофизиологическим катетерам с ручкой управления и корпусом катетера просветного типа.
Уровень техники
Стержни катетеров в целом изготавливаются из гибкого биологически совместимого материала, такого как пластик, включая полиэтилен, полиэфир или полиамид. Однако перемещение катетера вперед в и сквозь тело пациента и манипулирование им могут быть затруднены, если стержень катетера не имеет достаточной жесткости. Кроме того, может быть особенно затруднительным получить подходящую гибкость, особенно вблизи узла наконечника стержня, сохранив при этом достаточную общую жесткость стержня. Хотя имеются устройства, способные обеспечить или добавить жесткость катетерам, включая придающую жесткость проволоку, они типично являются отдельными устройствами, не внедренными в катетер, вследствие чего они требуют отдельного управления и манипулирования. Фактически, имеется лишь немного, если вообще имеются, известных механизмов, располагающихся внутри катетера, которые могут перемещать придающую жесткость проволоку или другие устройства в электрофизиологический катетер или через него. Поэтому имеется потребность в создании катетера, имеющего внутренний механизм подачи, который может обеспечить перемещение придающей жесткость проволоки или других устройств в или через стержень катетера.
Сущность изобретения
Настоящее изобретение может быть применено для широкого ряда различных электрофизиологических катетеров (с гибким стержнем и/или многопрофильных), которые имеют системы для подачи придающей жесткость проволоки, иглы или любого другого устройства. В одном варианте воплощения предлагается катетер, имеющий корпус катетера, узел наконечника и устройство, идущее через, по меньшей мере, корпус катетера, в котором ручка управления имеет механизм подачи с резьбовым элементом, регулировочным элементом и управляемым элементом, расположенным между ними, к которому присоединено устройство, для перемещения устройства вперед и назад вдоль корпуса катетера под управлением пользователя.
Дополнительно предлагается, что и резьбовой элемент, и регулировочный элемент, которые оба в целом являются цилиндрическими, соединяются друг с другом таким образом, что между внутренней поверхностью регулировочного элемента и внешней поверхностью резьбового элемента - управляемый элемент, причем управляемый элемент перемещается по спиральному направляющему каналу, сформированному во внешней поверхности резьбового элемента. Регулировочный элемент выполнен с возможностью его поворота под управлением пользователя вокруг резьбового элемента для перемещения управляемого элемента в канале, тем самым управляя перемещением вперед и назад устройства, прикрепленного к управляемому элементу. Поворот в одном направлении обеспечивает перемещение устройства вперед вдоль корпуса катетера, и поворот в противоположном направлении обеспечивает перемещение устройства назад. Устройством может быть придающая жесткость проволока, игла или любое другое устройство, которое может быть перемещено вперед и назад в катетере и может доставлять текучую среду. В более подробном варианте воплощения, предлагается катетер, имеющий корпус катетера, узел наконечника, ручку управления, содержащую резьбовой элемент, регулировочный элемент, установленный на резьбовом элементе, и управляемый элемент, размещенный между ними, и устройство, присоединенное к управляемому элементу и идущее от него в дистальном направлении через ручку управления, корпус катетера и узел наконечника. Регулировочный элемент выполнен с возможностью его поворота пользователем относительно резьбового элемента для перемещения устройства вперед и назад. Устройство намотано вокруг резьбового элемента и выполнено с возможностью его разматывания и обратного наматывания под управлением управляемого элемента в соответствии с поворотом пользователем регулировочного элемента относительно резьбового элемента.
Краткое описание чертежей
Эти и другие признаки и преимущества настоящего изобретения станут более понятны с помощью последующего подробного описания вместе с прилагаемыми чертежами.
Фиг.1 вид сбоку варианта воплощения катетера по настоящему изобретению.
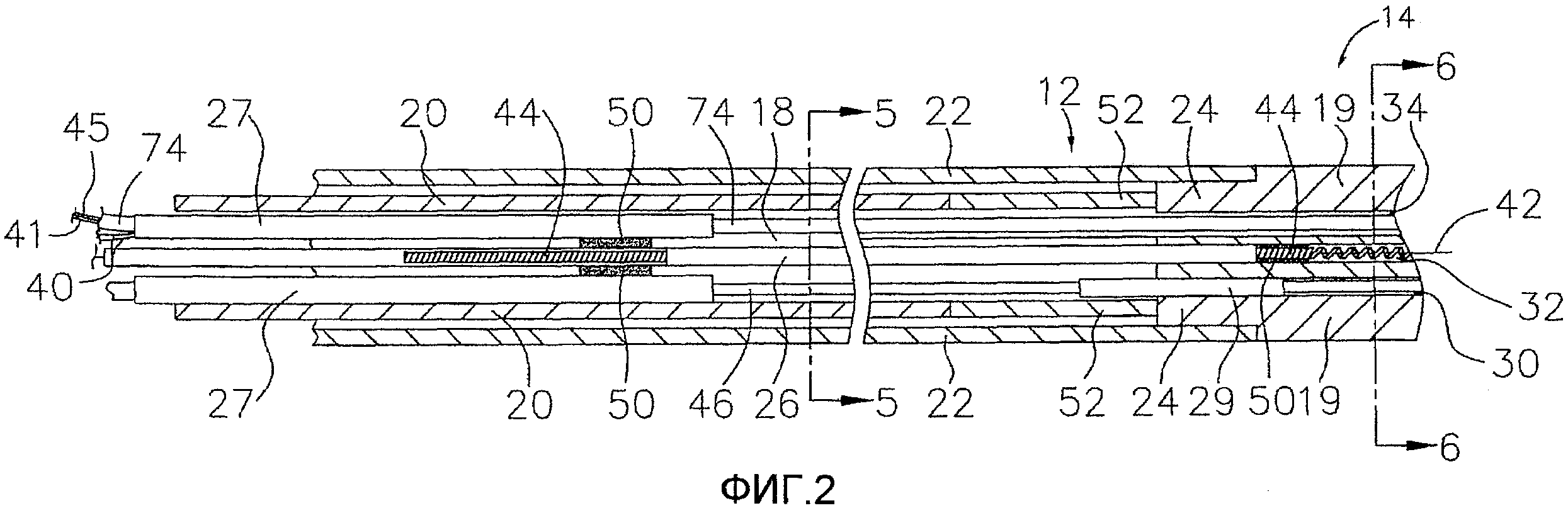
Фиг.2 вид сбоку в разрезе варианта воплощения корпуса катетера, на котором показано соединение между корпусом катетера и узлом наконечника.
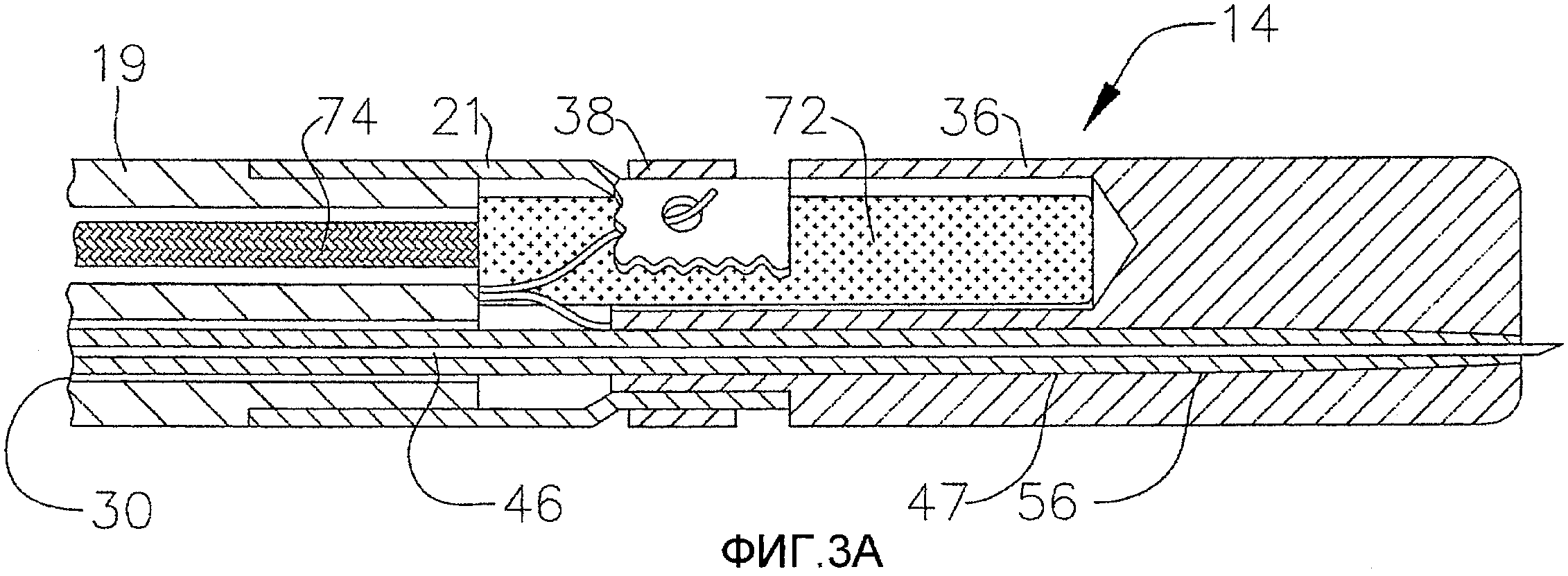
Фиг.3А - вид сбоку в разрезе варианта воплощения узла наконечника, взятом по первому диаметру узла наконечника.
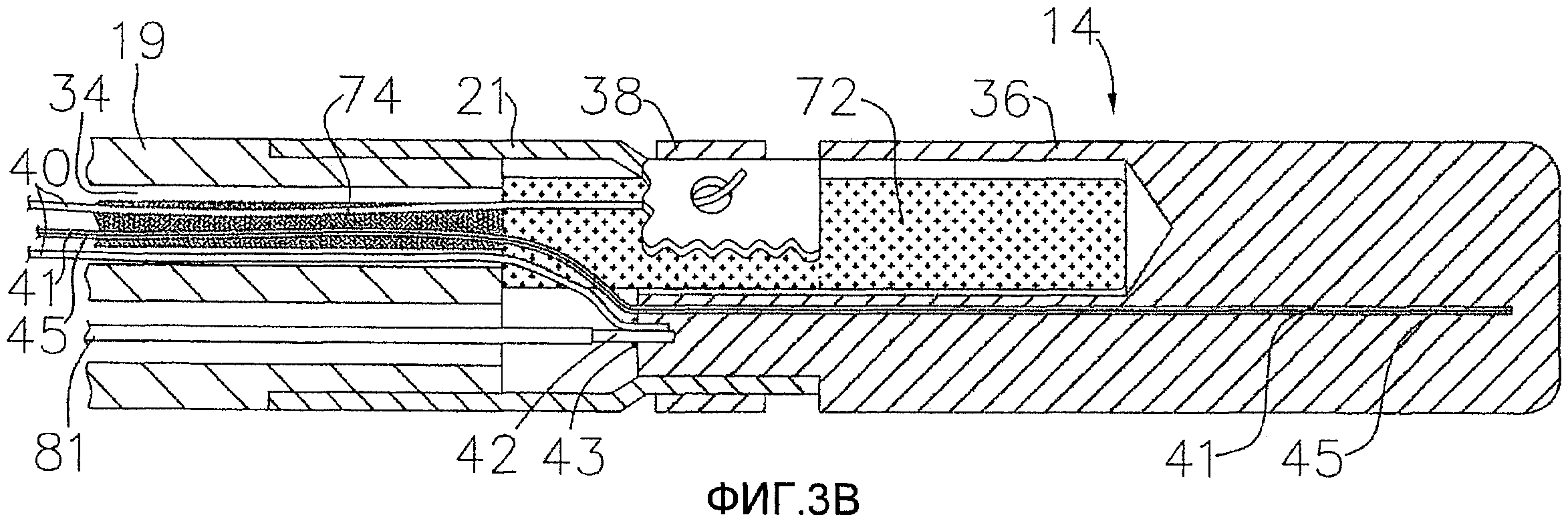
Фиг.3В - вид сбоку в разрезе варианта воплощения узла наконечника, взятом по второму диаметру, в целом перпендикулярного первому диаметру.
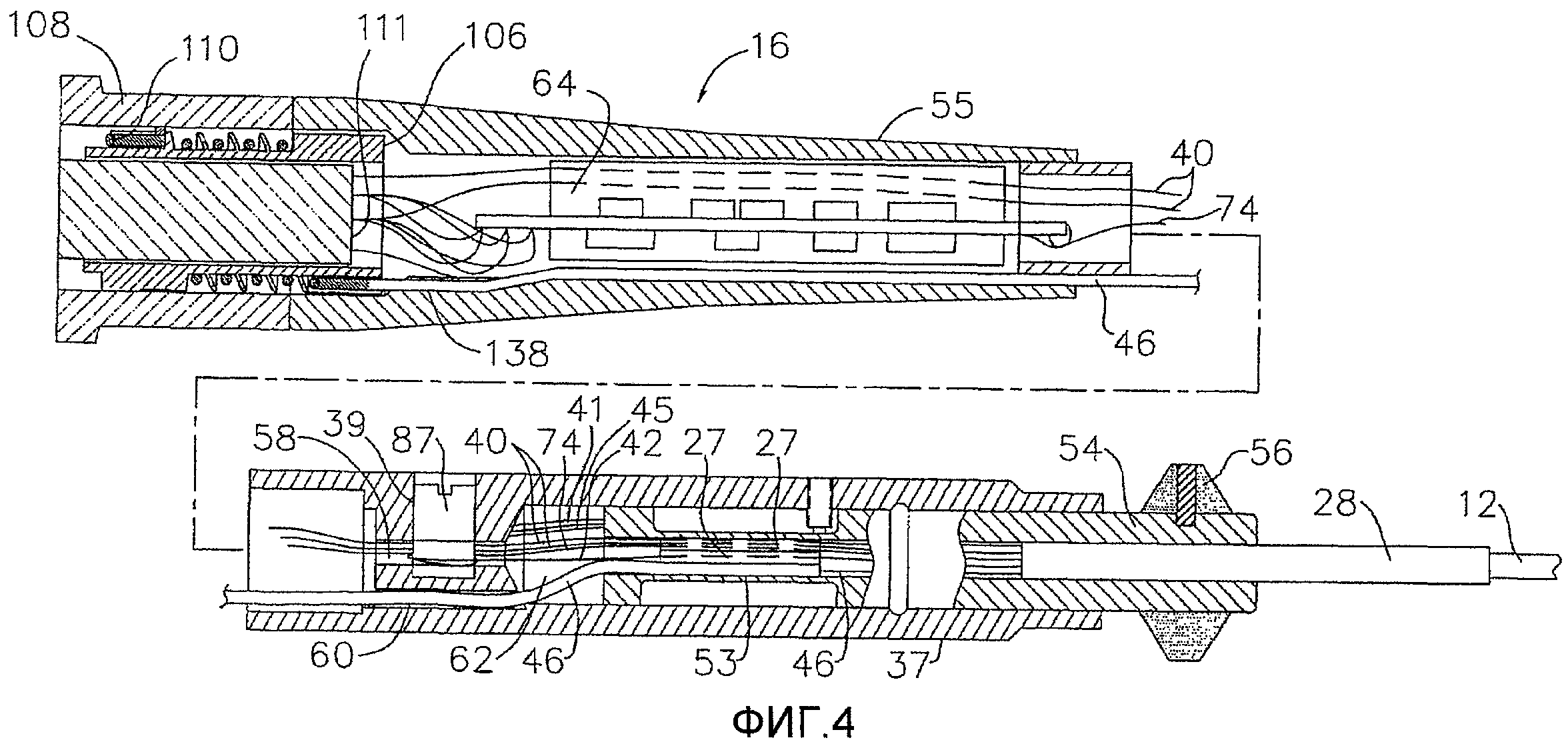
Фиг.4 - вид сбоку в разрезе варианта воплощения ручки катетера.
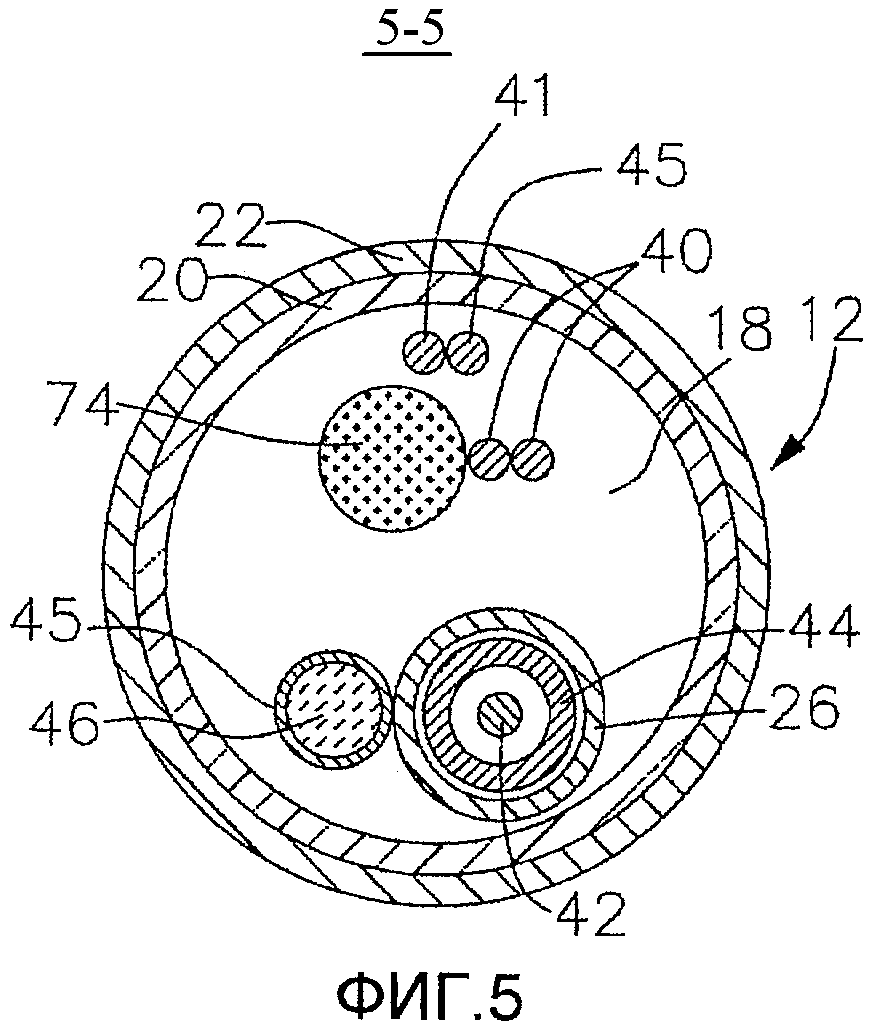
Фиг.5 - вид в поперечном разрезе корпуса катетера на фиг.2, взятом в целом по линии 5-5.
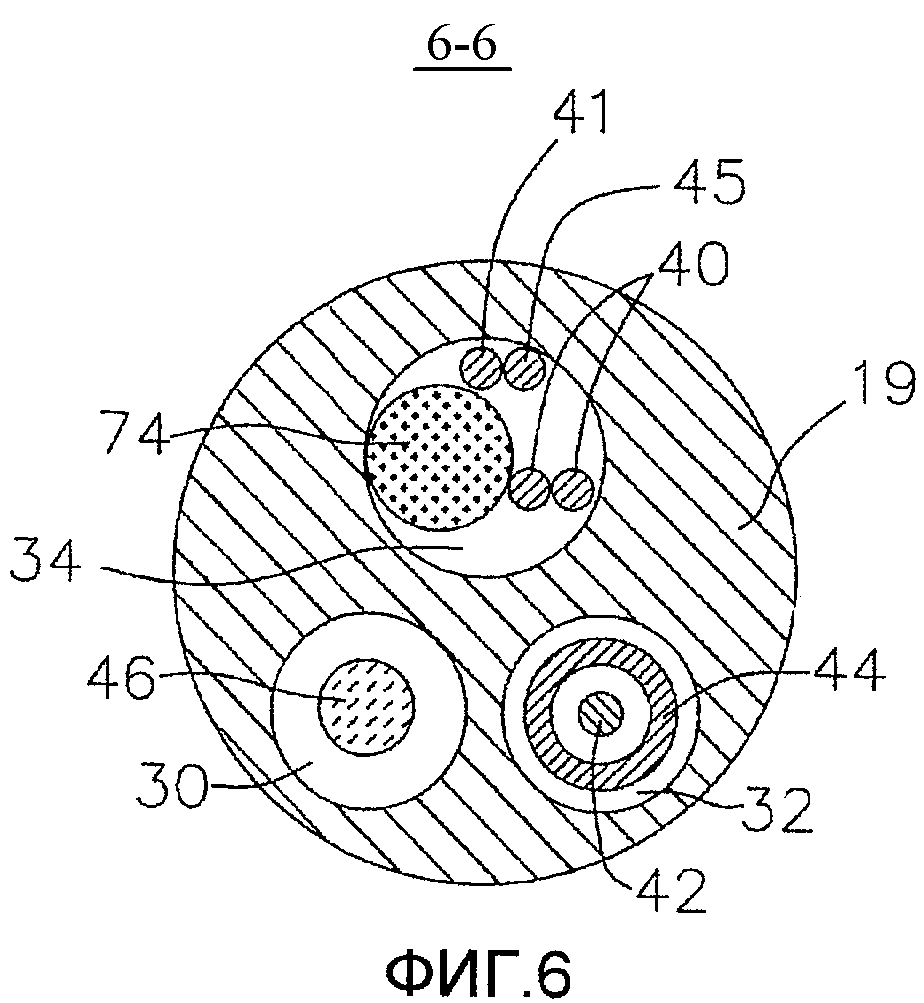
Фиг.6 - вид в поперечном разрезе узла наконечника на фиг.2, взятом в целом по линии 6-6.
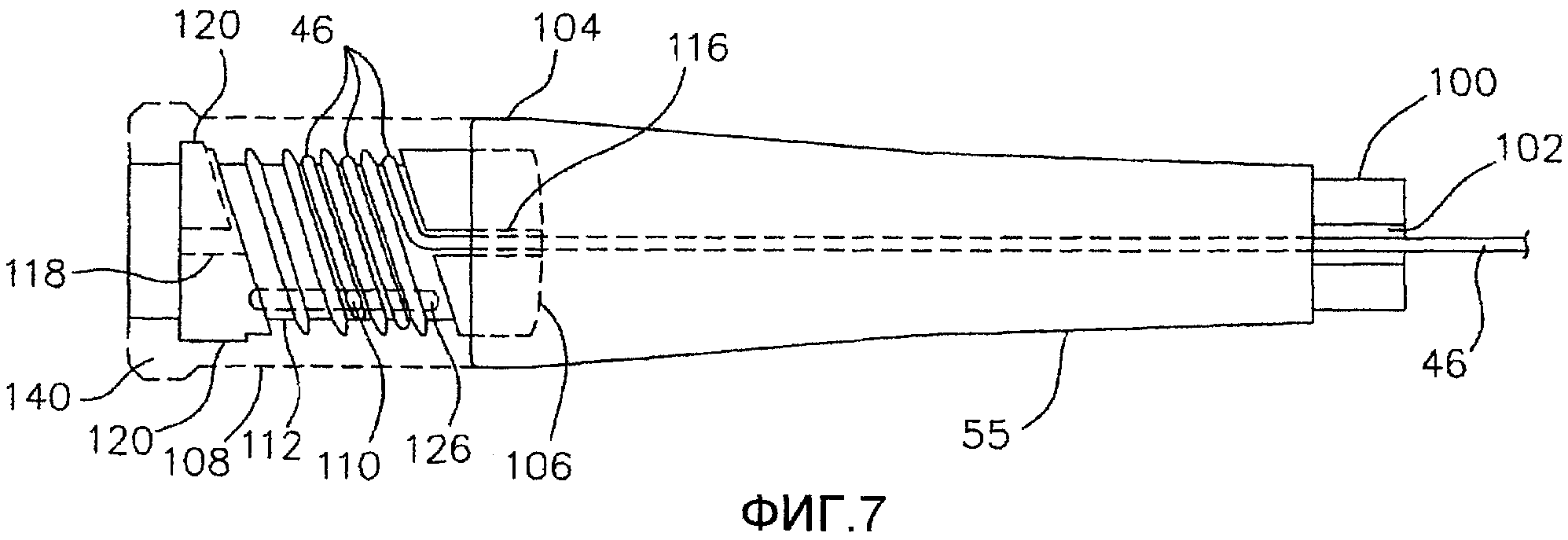
Фиг.7 - вид сверху ручки катетера.
Фиг.8 - вид сбоку в разрезе механизма подачи корпуса ручки управления.
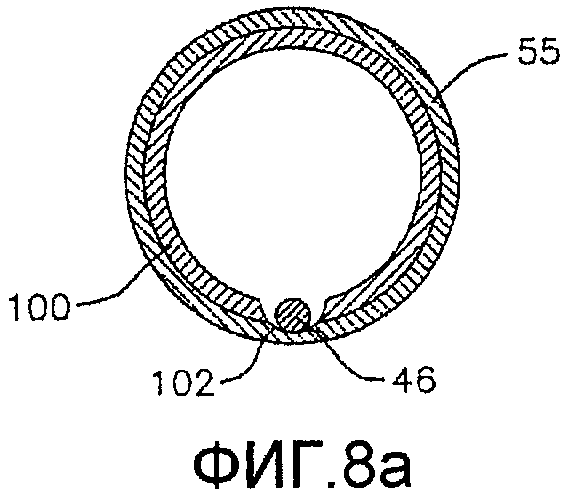
Фиг.8А - вид в поперечном разрезе корпуса на фиг.8, взятом по линии а-а.
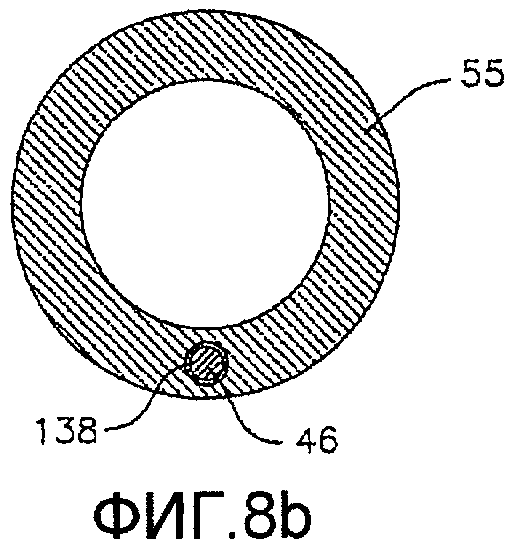
Фиг.8В - вид в поперечном разрезе корпуса на фиг.8, взятом по линии b-b.
Фиг.8C - вид в поперечном разрезе корпуса на фиг.8, взятом по линии c-c.
Фиг.8D - вид в поперечном разрезе резьбового элемента на фиг.8, взятом по линии d-d.
Фиг.8Е - вид в поперечном разрезе резьбового элемента на фиг.8, взятом по линии е-е.
Фиг.8F - вид в поперечном разрезе регулировочного элемента на фиг.8, взятом по линии f-f.
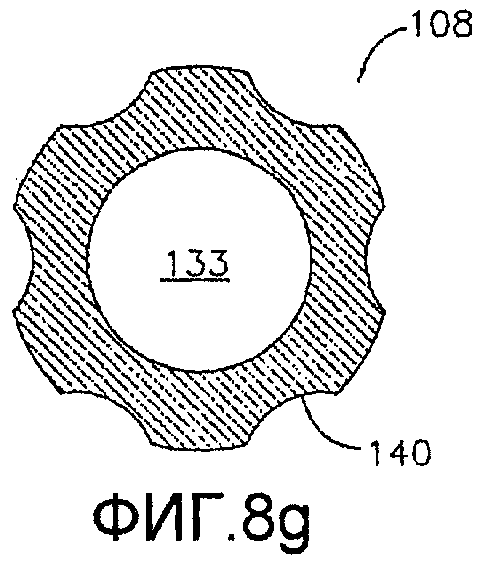
Фиг.8G - вид в поперечном разрезе регулировочного элемента на фиг.8, взятом по линии g-g.
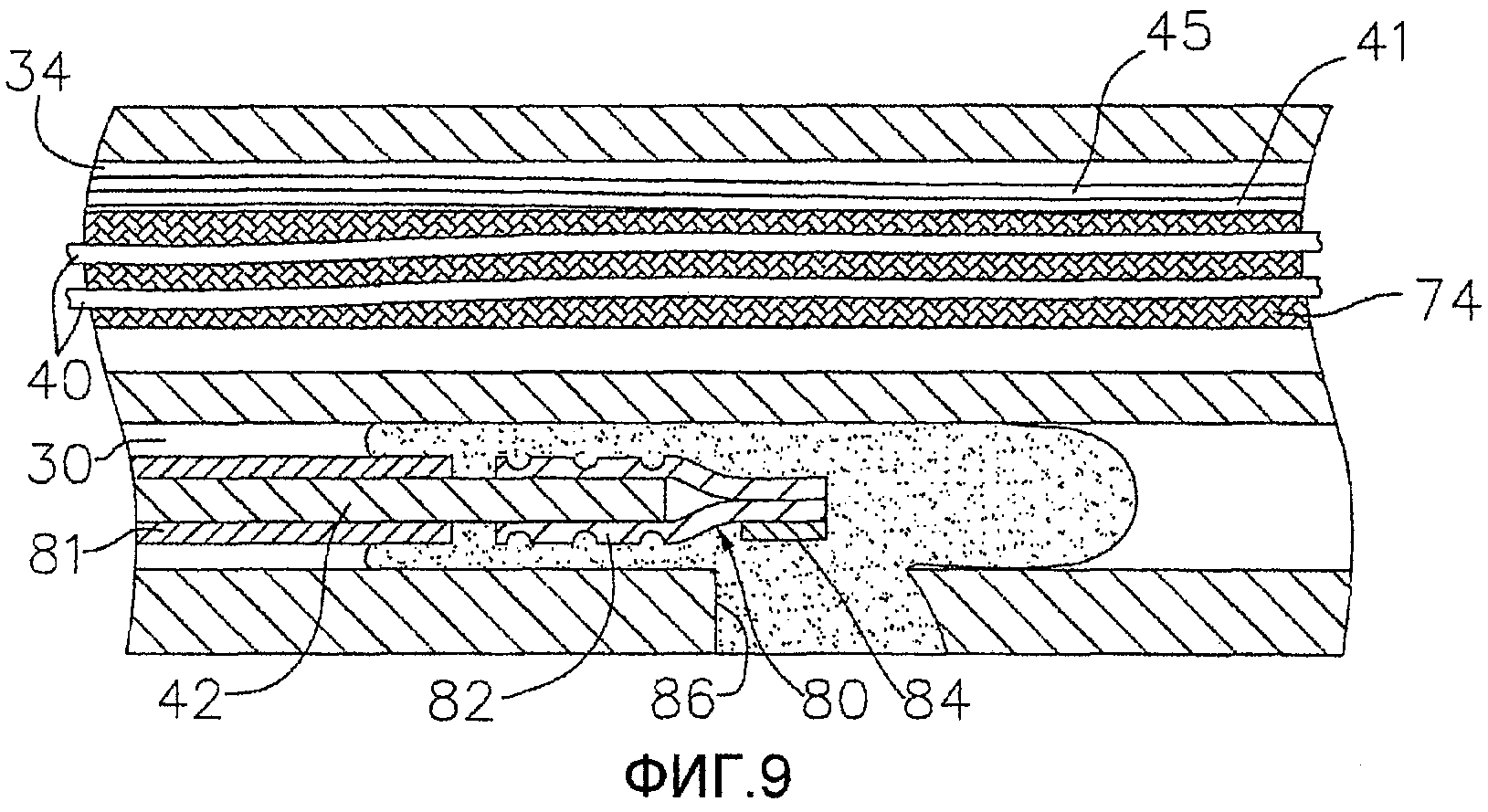
Фиг.9 - вид в разрезе части узла наконечника катетера, на котором показаны средства крепления тяговой проволоки.
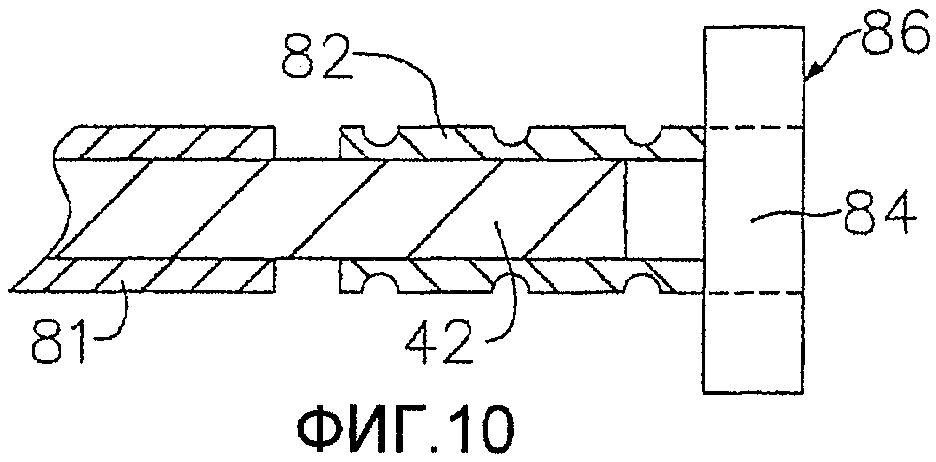
Фиг.10 - вид сверху в поперечном разрезе предпочтительного анкера для тяговой проволоки.
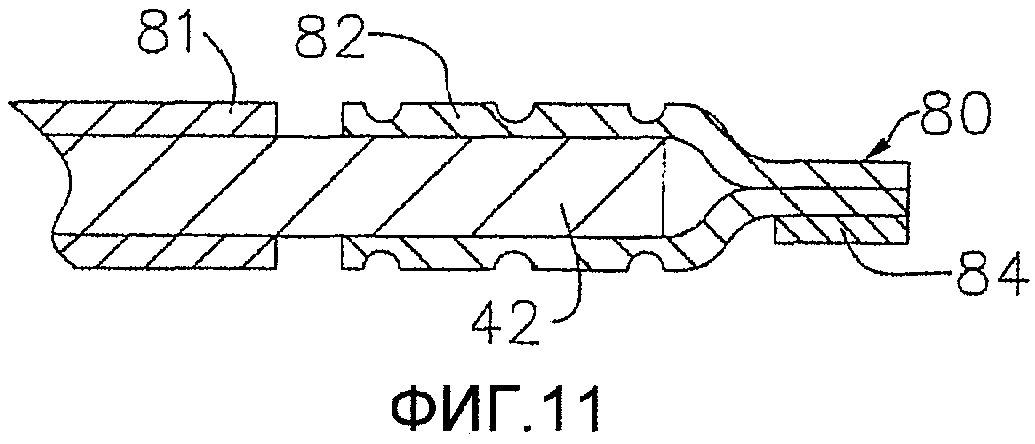
Фиг.11 - вид сбоку в разрезе предпочтительного анкера для тяговой проволоки.
Осуществление изобретения
Как показано на фиг.1, предлагается катетер 10 (например, электрофизиологический катетер), выполненный с возможностью осуществления в нем перемещения вперед и назад устройства 46 (например, проволока, игла, инфузионная трубка и т.п.). Катетер содержит корпус 12 катетера удлиненной формы, имеющий проксимальный и дистальный концы, узел 14 наконечника на дистальном конце корпуса 12 катетера, и ручку 16 управления, имеющую резьбовой механизм 17 подачи, выполненный с возможностью управления пользователем для перемещения устройства в дистальном и проксимальном направлениях в корпусе катетера.
Как показано на фиг.2 и фиг.5, корпус 12 катетера содержит трубчатую конструкцию удлиненной формы, имеющую одинарный, центральный или осевой, просвет 18. Корпус 12 катетера является гибким, т.е. выполнен с возможностью его изгибания, но по существу без возможности его сжимания вдоль его длины. Корпус 12 катетера может иметь любую подходящую конструкцию и быть изготовлен из любого подходящего материала. Один пример конструкции содержит внешнюю стенку 22, изготовленную из полиуретана или нейлона. Внешняя стенка 22 содержит внедренную плетеную сетку из нержавеющей стали или т.п. для увеличения крутильной жесткости корпуса 12 катетера таким образом, чтобы при повороте ручки 16 управления узел наконечника катетера 10 поворачивался соответствующим образом.
Внешний диаметр корпуса 12 катетера не является критичным. Аналогично, толщина внешней стенки 22 не является критичной. Внутренняя поверхность внешней стенки 22 футерована придающей жесткость трубкой 20, которая может быть изготовлена из любого подходящего материала, например полиамида. Придающая жесткость трубка, наряду с плетеной внешней стенкой 22, обеспечивает улучшенную устойчивость к крутильным колебаниям, в то же время минимизируя толщину стенки катетера, тем самым увеличивая до максимума диаметр одинарного просвета. Внешний диаметр придающей жесткость трубки 20 примерно такой же, или немного меньше, что и внутренний диаметр внешней стенки 22. Полиамидная трубка может иметь очень тонкие стенки, при этом все еще обеспечивая очень хорошую жесткость. Это увеличивает до максимума диаметр центрального просвета 18, без потери прочности и жесткости. Полиамидный материал, как правило, не используется для изготовления придающих жесткость трубок, так как он имеет тенденцию к образованию перегибов при изгибании. Однако было обнаружено, что в комбинации с внешней стенкой 22 из полиуретана, нейлона или другого подобного материала, особенно имеющего плетеную сетку из нержавеющей стали, склонность полиамидной придающей жесткость трубки 20 образовывать перегибы при ее изгибании по существу устраняется, что касается тех областей применения, в которых используется катетер.
Как показано на фиг.2 и фиг.6, узел 14 наконечника содержит короткую часть в виде трубки 19, имеющей три просвета. Трубка 19 изготовлена из подходящего нетоксичного материала, который может быть более гибким, чем корпус 12 катетера. Одним из примеров материала для трубки 19 является плетеный полиуретан, т.е. полиуретан с внедренной сеткой из плетеной нержавеющей стали или т.п. Внешний диаметр узла 14 наконечника аналогичен диаметру корпуса 12 катетера. Размер просветов не является критичным. В одном варианте воплощения первый просвет 30 и второй просвет 32 имеют в целом примерно одинаковый размер, а третий просвет 34 имеет немного больший размер.
Один вариант воплощения средств для крепления корпуса 12 катетера к узлу 14 наконечника показан на фиг.2. Проксимальный конец узла 14 наконечника содержит кольцевой выступ 24, на наружной поверхности которого размещается внутренняя поверхность внешней стенки 22 корпуса 12 катетера. Узел 14 наконечника и корпус 12 катетера крепятся друг к другу с помощью клея или т.п. В показанной конструкции, внутри корпуса 12 катетера между дистальным концом придающей жесткость трубки 20 и проксимальным концом узла 14 наконечника размещается промежуточный элемент 52. Промежуточный элемент 52 может быть изготовлен из материала, который жестче, чем материал узла 14 наконечника, т.е. полиуретан, но не такой жесткий, как материал придающей жесткость трубки 20, т.е. полиимид. В одном варианте воплощения может использоваться промежуточный элемент, изготовленный из тефлона RTM. Промежуточный элемент 52 может иметь внешний и внутренние диаметры примерно такие же, что и внешний и внутренний диаметры придающей жесткость трубки 20. Промежуточный элемент 52 обеспечивает переходный участок для обладающих разной степенью гибкости корпуса 12 катетера и узла 14 наконечника в месте их соединения, что позволяет соединению корпуса 12 катетера и узла 14 наконечника изгибаться плавно без образования складок или перегибов.
Промежуточный элемент 52 удерживается по месту придающей жесткость трубкой 20. Придающая жесткость трубка 20, в свою очередь, удерживается по месту относительно внешней стенки 22 с помощью клеевых соединений на проксимальном конце корпуса 12 катетера.
Как показано на фиг.2 и фиг.5, через одинарный просвет 18 корпуса 12 катетера идут выводы 40, устройство 46, кабель 74 датчика и винтовая пружина 44 сжатия, через которую идет тяговая проволока 42. Корпус катетера с одинарным просветом 18 может обеспечить лучшее управление узлом наконечника при повороте катетера 10, чем многопросветный корпус. Одинарный просвет 18 обеспечивает возможность свободного «плавания» выводов 40, устройства 46, кабеля 74 датчика и тяговой проволоки 42, окруженной винтовой пружиной 44 сжатия, внутри корпуса катетера. Если бы такие компоненты были заключены внутри нескольких просветов, они могли бы накапливать энергию при повороте ручки 16, в результате чего корпус 12 катетера стремился поворачиваться в обратном направлении, если, например, ручку отпускают, или, если изгибается вокруг кривой, поворачиваться на 180 градусов, что часто является нежелательным при эксплуатации.
Тяговая проволока 42 крепится на ее проксимальном конце к ручке 16 управления и крепится на ее дистальном конце к узлу 14 наконечника. Тяговая проволока 42 изготовлена из любого подходящего металла, такого как нержавеющая сталь или нитинол, и покрыта тефлоном RTN или т.п. Покрытие придает проволоке 42 скользящие свойства.
Винтовая пружина 44 сжатия продолжается от проксимального конца корпуса 12 катетера к проксимальному концу узла 14 наконечника. Винтовая пружина 44 сжатия изготовлена из любого подходящего металла, такого как нержавеющая сталь. Винтовая пружина 44 имеет плотную навивку, чтобы обеспечить гибкость, т.е. возможность изгибаться, но сопротивляться сжатию. Внутренний диаметр винтовой пружины 44 сжатия немного больше диаметра тяговой проволоки 42. Покрытие тефлоном RTM на тяговой проволоке 42 дает ему возможность свободно скользить внутри винтовой пружины 44 сжатия. Вдоль ее длины, внешняя поверхность винтовой пружины 44 сжатия покрыта гибкой непроводящей оболочкой 26 для предотвращения контакта между винтовой пружиной 44 сжатия и любым из выводов 40, устройством 46 или кабелем 74 датчика. Непроводящая оболочка 26 может быть изготовлена из полиамидной трубки.
Винтовая пружина 44 сжатия крепится на ее проксимальном конце к проксимальному концу придающей жесткость трубки 20 в корпусе 12 катетера с помощью клеевого соединения, и на ее дистальном конце к узлу 14 наконечника в позиции, дистальной относительно промежуточного элемента 52 с помощью клеевого соединения 50. Оба клеевых соединения могут содержать полиуретановый клей или т.п. Клей может быть наложен с помощью шприца или т.п. через отверстие, выполненное между внешней поверхностью корпуса 12 катетера и одинарным просветом 18. Такое отверстие может быть сформировано, например, с помощью иглы или т.п., которая прокалывает стенку корпуса 12 катетера и придающую жесткость трубку 20, которая нагревается достаточно, чтобы сформировать постоянное отверстие. Затем через отверстие на внешнюю поверхность винтовой пружины 44 сжатия вводится клей, и с помощью тампона он распределяется по данной внешней поверхности, чтобы сформировать клеевое соединение по всей окружности винтовой пружины 44 сжатия.
Как показано на фиг.2 и фиг.6, тяговая проволока 42 идет во второй просвет 32 узла 14 наконечника. Тяговая проволока 42 крепится к концевому электроду 36 или к боковой стороне узла 14 наконечника катетера. Внутри катетера 14 и дистально относительно клеевого соединения 51 витки винтовой пружины сжатия растягиваются в продольном направлении. Такие растянутые витки имеют возможность одновременно как изгибаться, так и сжиматься. Тяговая проволока 42 идет через растянутые витки, затем в пластиковую (например, из тефлона RTM) оболочку 81 (см. фиг.3В), которая предотвращает врезание тяговой проволоки 42 в стенку узла 14 наконечника, когда узел наконечника отклоняется.
Как показано на фиг.3В, дистальный конец тяговой проволоки 42 крепится к концевому электроду 36 с помощью пайки или т.п., как показано на фиг.2b, или к боковой стенке узла 14 наконечника. При креплении к боковой стенке будет использоваться вариант воплощения, содержащий анкер 80, который неподвижно крепится к дистальному концу тяговой проволоки 42, как показано на фиг.9-11. В таком варианте воплощения анкер формируется металлической трубкой 82, например коротким сегментом гиподермической трубки, которая неподвижно крепится, например, путем обжатия, к дистальному концу тяговой проволоки 42. Трубка 82 имеет участок, который идет на небольшое расстояние за пределы дистального конца тяговой проволоки 42. Поперечина 84, изготовленная из небольшой полоски нержавеющей стали или т.п., припаивается или приваривается перпендикулярно к дистальному концу трубки 82, который сплющивается во время данной операции. В результате получается Т-образный анкер 80. В боковой стенке узла 14 наконечника катетера выполняется паз 86, в результате чего получают отверстие, идущее во второй просвет 32, в котором располагается тяговая проволока 42. Анкер 80 лежит внутри паза 86. Так как длина полоски, формирующей поперечину 84, больше диаметра отверстия во второй просвет 32, анкер 80 не может полностью войти в второй просвет 32. Паз 86 затем герметизируется полиуретаном или т.п., чтобы получить гладкую внешнюю поверхность.
Как показано на фиг.3А и 3В на дистальном конце узла 14 наконечника имеется концевой электрод 36. В иллюстрируемом варианте воплощения концевой электрод 36 имеет диаметр примерно такой же, что и внешний диаметр трубки 19. Концевой электрод 36 присоединяется к трубке 19 с помощью пластикового корпуса 21, который может быть изготовлен из полиэфирэфиркетона. Проксимальный конец концевого электрода 36 имеет кольцевой выступ, который вставляется внутрь дистального конца пластикового корпуса 21, и крепится к корпусу 21 с помощью полиуретанового клея или т.п. Проксимальный конец пластикового корпуса 21 крепится с помощью полиуретанового клея или т.п. к дистальному концу трубки 19 узла 14 наконечника.
На дистальном конце пластикового корпуса 21 устанавливается кольцевой электрод 38. Кольцевой электрод 38 надевается путем скольжения на пластиковый корпус 21 и фиксируется по месту с помощью клея или т.п. При необходимости могут использоваться дополнительные кольцевые электроды, которые могут быть расположены на пластиковом корпусе 21 или на гибкой трубке 19 узла 14 наконечника.
Концевой электрод 36 и кольцевой электрод 38 каждый подсоединены к отдельным выводам 40. Выводы 40 идут через третий просвет 34 узла 14 наконечника, корпус 12 катетера и ручку 16 управления, и оканчиваются на их проксимальном конце гнездом для подключения (не показано), которое может быть вставлено в соответствующий монитор (не показан). Если требуется, участок выводов 40, идущий через корпус 12 катетера, ручку 16 управления и проксимальный конец узла 14 наконечника может быть заключен или объединен в пучок внутри защитной трубки или оболочки.
Выводы 40 крепятся к концевому электроду 36 и кольцевому электроду 38 посредством любого стандартного способа. Присоединение вывода 40 к концевому электроду 36 может быть осуществлено с помощью сварочного соединения 43, как показано на фиг.3В. Присоединение вывода 40 к кольцевому электроду 38 может быть осуществлено следующим образом. Сначала в пластиковом корпусе 21 делается небольшое сквозное отверстие. Такое отверстие может быть создано, например, путем вставки иглы через пластиковый корпус 21 и нагрева иглы достаточно, чтобы сформировать постоянное отверстие. Вывод 40 затем очищается от всех покрытий и припаивается или приваривается к нижней стороне кольцевого электрода 38, который затем перемещают путем скольжения в позицию над отверстием и фиксируют по месту с помощью полиуретанового клея или т.п.
В иллюстрируемом варианте воплощения, концевой электрод 36 и, если потребуется, кольцевой электрод 38, имеют средства определения температуры. Любые стандартные средства определения температуры, например термопара или термистор, могут использоваться. Как показано на фиг.3В, одни средства определения температуры для концевого электрода 36 содержат термопару, сформированную парой эмалированных проводов. Один провод из пары проводов является медным проводом 41, например медный провод номер 40, который действует не только как часть термопары, но также как вывод электрода. Другой провод из пары проводов является монтажным проводом 45, например монтажным проводом номер 40, который обеспечивает поддержку и прочность пары проводов. Провода 41 и 45 электрически изолированы друг от друга, за исключением их дистальных концов, где они контактируют и приварены или припаяны к концевому электроду 36. Так как является желательным отслеживать температуру концевого электрода 36 на участке, смежном дистальному концу оптического волокна 46, термопара с глухим отверстием в концевом электроде 36 фиксируется на концевом электроде 36 на дистальном конце глухого отверстия, как показано на чертеже. Провода 41 и 45 идут через третий просвет 34 узла 14 наконечника и через центральный просвет 18 корпуса 12 катетера в ручку 16 управления.
В иллюстрируемом варианте воплощения электромагнитный датчик 72 размещается внутри дистального конца узла 14 наконечника. Электромагнитный датчик 72 подсоединяется с помощью кабеля 74 электромагнитного датчика, который идет через третий просвет 34 узла 14 наконечника и через корпус 12 катетера в ручку 16 управления. Кабель 74 электромагнитного датчика содержит множество проводов, заключенных внутри покрытой пластиком оболочки. В ручке 16 управления провода кабеля 74 датчика подсоединяются к печатной схеме 64. Печатная схема 64 усиливает сигнал, полученный от электромагнитного датчика, и передает его в компьютер в понятной тому форме. Также, так как катетер предназначен только для однократного использования, печатная схема содержит чип стираемого программируемого постоянного запоминающего устройства (СППЗУ), который отключает печатную схему после того, как катетер был использован. Это защищает катетер или по меньшей мере электромагнитный датчик от повторного использования. Подходящий электромагнитный датчик раскрыт, например, в патенте США номер 4,391,199, который включен здесь путем ссылки. Электромагнитный картографический датчик 72 изготавливается компанией Biosense Ltd, Израиль и предлагается на рынке под торговым обозначением NOGA.
Выводы 40 электрода, провода 41 и 45 термопары и кабель 74 электромагнитного датчика и любые другие компоненты или устройство, включая устройство 46, имеют возможность продольного перемещения внутри корпуса 12 катетера. Провода 40, 41 и 45 и кабель 74 имеют возможность выполнять такое перемещение, что они не разрушаются, когда узел 14 наконечника отклоняется. Устройство 26 имеет возможность выполнять такое перемещение, что оно может быть перемещено вперед и назад в соответствии с признаком настоящего изобретения. Чтобы обеспечить такое продольное перемещение имеются туннели, проходящие через клеевое соединение 50 в корпусе 12 катетера (фиг.2), которое фиксируют проксимальный конец катушки 44 сжатия внутри корпуса 12 катетера. Туннели сформированы транспортными трубками 27, изготовленными из коротких участков полиамидной трубки в одном варианте воплощения. В варианте воплощения, показанном на фиг.2, имеется одна транспортная трубка 27 для проводов 40, 41 и 45 и кабеля 74 электромагнитного датчика и вторая транспортная трубка 27 для устройства 46. Понятно, что количество транспортных трубок может изменяться по требованию.
Продольное перемещение тяговой проволоки 42 относительно корпуса 12 катетера, которое приводит к отклонению узла 14 наконечника, осуществляется путем соответствующего манипулирования ручкой 16 управления. Как показано на фиг.4, дистальный конец ручки 16 управления содержит поршень 54 с устройством управления 56 посредством пальца для манипулирования тяговой проволокой 42. Проксимальный конец корпуса 12 катетера присоединен к поршню 54 с помощью усадочного рукава 28.
Тяговая проволока 42, выводы 40, провода 41 и 45 термопары, устройство 46 и кабель 74 электромагнитного датчика идут через поршень 54. Поршень 54 располагается внутри корпуса 57 ручки управления. Корпус 57 является в целом сплошным и имеет камеру поршня для размещения поршня 54. В проксимальном направлении от камеры поршня идут два продольных туннеля 58 и 60 и поперечное отверстие 59 для приема анкерного штифта 87. Первый продольный туннель 58 связан с поперечным отверстием 59. Выводы 40, провода 41 и 45 термопары и кабель 74 электромагнитного датчика идут через первый туннель 58. Тяговая проволока 42 также идет через первый туннель 58 и крепится к анкерному штифту 87 в поперечном отверстии 59. Устройство 46 идет через второй тоннель 60. Между дистальным концом туннелей 58 и 60 и проксимальным концом поршня 54 камера 62 обеспечивает дополнительное пространство для исключения нежелательного изгиба компонентов, идущих через нее. Кабель 74 электромагнитного датчика присоединяется к печатной схеме 64 в ручке 16 управления. Провода 90 соединяют печатную схему 64 с компьютером и отображающим монитором (не показаны).
Устройство 46, например придающая жесткость проволока, игла или т.п., идет через ручку 16 управления и корпус 12 катетера и в первый просвет 30 узла 14 наконечника. В соответствии с признаком настоящего изобретения устройство 46 имеет возможность его перемещения в дистальном и проксимальном направлениях внутри корпуса катетера посредством манипулирования ручкой 16 управления, как более подробно описано ниже. Когда устройство является придающей жесткость проволокой или т.п., то имеется возможность управлять придающей жесткость проволокой таким образом, чтобы она скользила в дистальном и проксимальном направлениях внутри корпуса катетера и/или узла наконечника. Когда устройство 46 является иглой или т.п., его дистальный конец может быть перемещен за пределы дистального конца узла наконечника, чтобы достичь и контактировать с тканью организма отдельно от узла наконечника, и затем может быть перемещен обратно в узел наконечника. Как будет понятно специалисту в данной области техники, устройство 46 не ограничивается придающей жесткость проволокой и иглами, а включает в себя любую конструкцию, которая может перемещаться внутри катетера.
В иллюстрируемом на фиг.4, 7 и 8 варианте воплощения, ручка 16 управления имеет второй корпус 55, располагающийся проксимально относительно корпуса 57, для вытянутой конфигурации ручки управления. Устройство 46 продолжается в проксимальном направлении в ручку управления через поршень 54 в дистальном корпусе 57 и через дистальный конец 100 проксимального корпуса 55, который имеет отверстие или паз 102 в его в целом круглом поперечном сечении (фиг.7), чтобы принять устройство 46. В иллюстрируемом варианте воплощения, механизм подачи 17, как средство для обеспечения возможности перемещения устройства 46 вперед и назад в соответствии с одним признаком настоящего изобретения, устанавливается на проксимальном конце 104 проксимального корпуса 55.
В иллюстрируемом варианте воплощения механизм 17 подачи устройства включает в себя в целом цилиндрический резьбовой направляющий элемент 106, в целом цилиндрический регулировочный элемент 108, установленный на нем, и управляемый элемент 110 (например, штырек или палец), размещенный между внешней поверхностью 114 элемента 106 и внутренней поверхностью 109 элемента 108. Управляемый элемент скользит в спиральном направляющем канале 112, имеющем в целом прямой дистальный участок 116 и в целом прямой проксимальный участок 118, которые все сформированы во внешней поверхности 114 направляющего элемента 106. В иллюстрируемом варианте воплощения, спиральный направляющий канал 112 наматывается вокруг направляющего элемента 106 на приблизительно 4-1/2 витков, так что дистальный и проксимальный участки 116 и 118 канала в целом диаметрально противоположны друг другу (см. фиг.8d и фиг.8е).
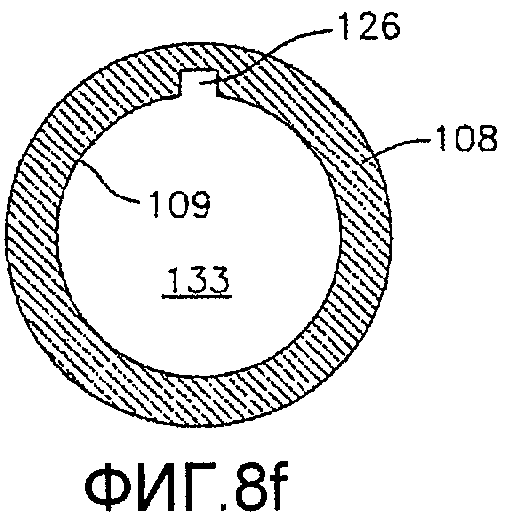
В целом цилиндрический регулировочный элемент 108 имеет такие размеры, что его внутренняя часть находится в близком соответствии элементу 106, обеспечивая размещение в нем последнего таким образом, чтобы в целом соосно охватывать его. С этой целью направляющий элемент 106 имеет выступы 120, которые блокируются кольцевой выемкой 122, сформированной во внутренней поверхности 109 проксимального конца регулировочного элемента 108, для получения защелкивающегося соединения. Для правильной сборки механизма подачи выполняется радиальная регулировка, когда удлиненный паз 126, сформированный во внутренней поверхности 109 дистального конца элемента 108, принимает управляемый элемент 110, размещенный в канале 112 элемента 106. Как лучше показано на фиг.7, ширина паза находится в близком соответствии с шириной управляемого элемента 110, так что поворот регулировочного элемента 108 (показан штриховыми линиями) вызывает перемещение управляемого элемента 110 в канале 112 направляющего элемента 106. К управляемому элементу 110 прикреплен проксимальный конец устройства 46, смежный дистальный участок которого наматывается вокруг направляющего элемента 106 в направляющем канале 112 и идет во внутреннее пространство корпуса 55 от в целом прямого дистального участка 116 канала на элементе 106.
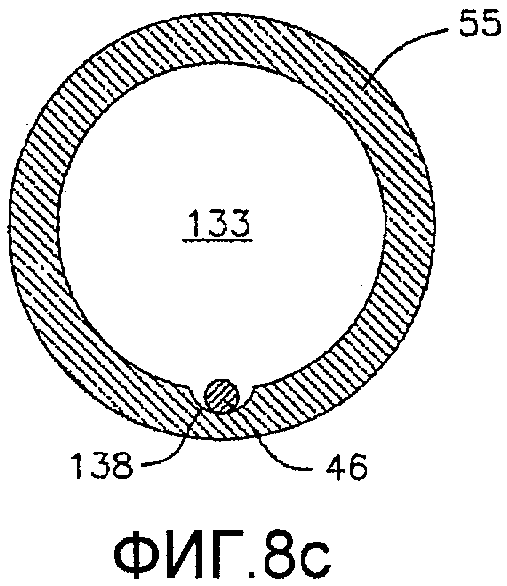
Как показано на фиг.8, дистальный конец направляющего элемента 106 вставлен в удлиненное соответствующее ему отверстие 130 на проксимальном конце корпуса 55, который имеет в целом цилиндрическую полую внутреннюю часть 132. При соединении элементов 108 и 106 механизм 17 подачи формирует проход 133, который связан с внутренней частью 132 корпуса 55 и дает возможность компонентам, таким как выводы 40, кабель 74 электромагнитного датчика и провода 41 и 45 термопары, идущие в проксимальном направлении через ручку управления, проходить через корпус 55. Эти компоненты идут через внутреннюю часть 132 корпуса 55, и устройство 46 идет также через нее, за исключением того, что в направлении проксимального конца корпуса 55 оно проходит по предназначенному для него проходу 138. Предпочтительно, проход 138 выполнен с возможностью выравнивания относительно в целом прямого дистального направляющего канала 116 направляющего элемента 106, так что устройство 46 может идти от внутренней части 132 через проход 138 и быть намотано вокруг элемента 106.
Для сборки механизма 17 подачи в ручке управления, управляемый элемент 110 с проксимальным концом устройства 46, прикрепленным к нему, помещается в канал 112 со смежным дистальным участком устройства 46, намотанным в каналах 112 и 116, дистально от него. Дистальный конец элемента 106 вставляется в корпус 55. Элемент 108 вставляется в дистальном направлении над элементом 106, с пазом 126, выровненным относительно управляемого элемента 110, до тех пор, пока выступы 120 элемента 106 не зафиксируются в кольцевой выемке 122 элемента 108, в целом упираясь в проксимальный конец корпуса 55.
Во время работы, чтобы осуществить перемещение вперед и назад устройства 46, пользователь может манипулировать механизмом 17 подачи путем поворота регулировочного элемента 108 с помощью головки 140, сформированной на проксимальном конце элемента 108. Когда пользователь поворачивает головку (например, по часовой стрелке в иллюстрируемом варианте воплощения), паз 126 во внутренней поверхности 109 поворачивается вокруг продольной оси элемента 108, чтобы привести в движение по спирали вдоль направляющего канала 112 в дистальном направлении управляемый элемент 110, который в свою очередь толкает в дистальном направлении устройство 46, присоединенное к нему. Такое перемещение вперед может продолжаться до тех пор, пока управляемый элемент 110 не достигнет в целом прямого дистального направляющего канала 116, где дистальный конец паза 126 блокирует дальнейшее перемещение в дистальном направлении управляемого элемента 110.
Чтобы переместить устройство 46 назад, пользователь поворачивает головку 140 в противоположном направлении (например, против часовой стрелки в иллюстрируемом варианте воплощения), что заставляет паз 126 приводить в движение по спирали в проксимальном направлении управляемый элемент 110, который в свою очередь тянет устройство 46 в проксимальном направлении. Данное перемещение назад может продолжаться до тех пор, пока управляемый элемент 110 не достигнет в целом прямого проксимального направляющего канала 116, где проксимальный конец паза 126 препятствует дальнейшему перемещению в проксимальном направлении управляемого элемента 110.
Специалисту в данной области техники понятно, что охватывающая продольная область между пазом 126 и спиральным направляющим каналом 112 ограничивает возможное расстояние, на которое может переместиться управляемый элемент 110, и тем самым расстояние перемещения вперед/назад устройства 46, и поэтому изменение любого или обоих параметров, включающих длину паза и протяженность в продольном направлении канала 112 между каналами 116 и 118, и/или степени охвата, может изменить расстояние перемещения управляемого элемента 110 и максимальное расстояние перемещения вперед/назад устройства 46. Кроме того, понятно, что другие изменения, включая изменение диаметра направляющего элемента 106 (которое изменяет окружность спирального канала 113 и максимальное расстояние перемещения вперед/назад) и/или количества намоток или витков спирального канала, может также изменить расстояние перемещения управляемого элемента и максимальное расстояние перемещения вперед/назад.
В иллюстрируемом на фиг.3А варианте воплощения устройством 46 является игла, которая может быть перемещена вперед за пределы дистального конца концевого электрода 36. Конечно, что будет понятно специалисту в данной области техники, устройство может быть другим инструментом или конструкцией, которому не требуется идти за пределы дистального конца концевого электрода при его перемещении вперед в его максимальную дистальную позицию. Вместо этого, величина перемещения вперед и назад, требуемая или подходящая, может быть получена в модификациях механизма подачи, включая, но не ограничиваясь этим, вышеуказанные варианты.
Вышеприведенное описание было представлено для предпочтительных в настоящее время вариантов воплощения изобретения. Специалистам в данной области техники будет очевидно, что варианты и изменения описанной конструкции могут быть осуществлены не отходя от принципов, сущности и объема настоящего изобретения. Например, механизм подачи может быть встроен в любом месте вдоль ручки управления. Пользовательский интерфейс может быть модифицирован, чтобы дать возможность использовать линейно перемещающуюся головку вместо поворачивающейся головки, описанной выше.
Соответственно, вышеприведенное описание не должно рассматриваться как относящееся только к точным конструкциям, описанным и проиллюстрированным на прилагаемых чертежах, но должно рассматриваться соответствующим и поддерживающим последующую формулу изобретения, в которой полностью и точно изложен его объем.
Катетер для деструкции с оптически прозрачной электропроводящей головкой
Оптический пирометрический катетер для мониторинга температуры ткани в ходе удаления сердечной ткани
Катетер с всенаправленным оптическим наконечником, обладающий изолированными оптическими путями
Катетер с одноосными датчиками
Силоизмерительный катетер с присоединенной центральной распоркой
Чувствительный к давлению зонд с высокой чувствительностью
Изгибаемый катетер с соединенной центральной стойкой и способ его производства
Визуализация зонда, основанная на механических свойствах
Следящее устройство для токовой локализации
Катетер для деструкции с оптически прозрачной электропроводящей головкой
Оптический пирометрический катетер для мониторинга температуры ткани в ходе удаления сердечной ткани
Катетер с всенаправленным оптическим наконечником, обладающий изолированными оптическими путями
Катетер с одноосными датчиками
Силоизмерительный катетер с присоединенной центральной распоркой
Чувствительный к давлению зонд с высокой чувствительностью
Изгибаемый катетер с соединенной центральной стойкой и способ его производства
Визуализация зонда, основанная на механических свойствах
Следящее устройство для токовой локализации

