Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ)
Вид РИД
Изобретение
Предлагаемая группа изобретений относится к области ракетного вооружения, а именно к способам стрельбы управляемыми ракетами, и может быть использована в системах наведения (СН) комплексов ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН, является повышение точности наведения за счет уменьшения ошибок, возникающих, в частности, от действия на ракету нормальных кинематических ускорений, например от действия силы тяжести, вращения линии визирования, воздействия бокового ветра.
При горизонтальном полете ракеты основная составляющая такой ошибки определяется постоянным действием на ракету силы тяжести и соответствует зависимости (Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.390, зависимость 7.34):
где g=9,81 м/с2 - ускорение свободного падения;
k0 - коэффициент передачи разомкнутого контура управления ракетой (1/с2).
Такая задача может быть решена при формировании в аппаратуре управления ракетой команды, компенсирующей кинематическое ускорение от действия силы тяжести.
Известен способ формирования команды управления вращающейся по углу крена ракетой (Выстрел 3 УБК 10-3 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации 3 УБК 10-3.00.00.000 ТО. М.: Военное издательство, 1987, с.13-19), включающий формирование постоянного сигнала в вертикальном канале управления, формирование сигнала крена ракеты, модуляцию им постоянного сигнала и преобразование полученного сигнала управления в отклонение руля.
Устройство, реализующее этот способ (Выстрел 3 УБК 10-3 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации 3 УБК 10-3.00.00.000 ТО. М.: Военное издательство, 1987, с.13-19), включает последовательно соединенные источник постоянного сигнала, усилитель, гирокоординатор и рулевой привод (РП), а также инвертор между выходом усилителя и вторым входом гирокоординатора.
При этом гирокоординатор одновременно выполняет две функции: измерения угла крена и модуляции сигналом крена входного постоянного сигнала, компенсирующего кинематическое ускорение от действия силы тяжести.
Наиболее близок к предлагаемому способ формирования команды управления вращающейся по углу крена ракетой (Патент RU №2131576, МПК F41G 7/00, 25.03.98), включающий формирование программно-временного сигнала, формирование сигнала крена ракеты, модуляцию им программно-временного сигнала и преобразование полученного сигнала управления в отклонение руля.
Устройство, реализующее этот способ (Патент RU №2131576, МПК F41G 7/00, 25.03.98), содержит последовательно соединенные источник программно-временного сигнала (ИПВС) и модулятор, а также измеритель угла крена (ИУК), выход которого соединен со вторым входом модулятора, и РП.
В соответствии с известным способом и реализующим его устройством осуществляется формирование программно-временного сигнала, необходимого для компенсации динамической ошибки от действия силы тяжести, и модуляция его сигналом крена. В результате модуляции сигнал управления формируется в связанной с вращающейся ракетой системе координат, благодаря чему указанная команда компенсации действует в вертикальной плоскости. Этот сигнал поступает на РП, отклоняющий руль ракеты.
Недостатком известных способов является невозможность правильного формирования команды управления до момента появления сигнала крена.
Так, во многих СН, где измерителем угла крена ракеты является гироскопический датчик, измерение угла крена производится дискретно, вследствие чего сигнал крена до определенного момента времени не соответствует истинному.
Например, при появлении истинных отсчетов по крену 4 раза за период вращения ракеты (Патент RU №2283466, МПК F41G 7/00, F42B 15/01, H03K 4/00 (2006.01), 29.03.2005) сигнал крена в процессе полета ракеты может быть правильно сформирован только после получения двух измеренных значений (истинных отсчетов), т.е. не ранее, чем через четверть периода вращения ракеты (максимум через половину периода).
Существуют также командные СН безгироскопных ракет семейства «Метис» (В.Дудка, Ю.Парфенов, М.Пальцев. Для атаки и обороны. «Военный парад», 2001, №3, с.68-72), в которых формирование сигнала крена осуществляется благодаря эксцентрично смещенному источнику излучения (трассеру), установленному на конце консоли стабилизатора ракеты. Пеленгатор в составе пусковой установки принимает это излучение, из которого вырабатывается координата источника, характеризующая поступательное движение центра масс ракеты и ее вращение по углу крена (Морозов В.И. Динамические свойства датчика быстрых угловых перемещений источника излучения. «Датчики и системы», 2001, №3, с.18-21).
В такой системе наведения время появления истинного (правильного) сигнала крена складывается из времени встреливания ракеты в поле зрения пеленгатора и времени окончания переходных процессов фильтров, производящих выделение сигнала крена из сигнала координат источника излучения. Это суммарное время составляет приблизительно половину первого периода вращения ракеты.
Задачей предлагаемой группы изобретений является повышение точности наведения одноканальной вращающейся по углу крена ракеты посредством ее ориентирования перед стартом по углу крена и формирования команды управления от момента старта ракеты до момента появления сигнала крена, исходя из априорно известного до пуска изменения положения ракеты по углу крена в течение этого промежутка времени.
Поставленная задача решается за счет того, что по сравнению с известным способом формирования команды управления одноканальной вращающейся по углу крена ракетой, включающим формирование программно-временного сигнала, формирование сигнала крена ракеты, модуляцию им программно-временного сигнала и преобразование полученного сигнала управления в отклонение руля, в предлагаемом способе ракету ориентируют перед стартом по углу крена, фиксируют момент появления сигнала крена, а от момента старта ракеты до момента фиксации формируют сигнал управления соответствующим программно-временному сигналу и предварительно прогнозируемому сигналу крена.
Устройство формирования команды управления одноканальной вращающейся по углу крена ракетой, реализующее этот способ по первому варианту, по сравнению с известным устройством, содержащим последовательно соединенные ИПВС и модулятор (М), а также ИУК, выход которого соединен со вторым входом М, и РП, снабжено последовательно соединенными источником программного релейного сигнала (ИПРС) и логическим устройством (ЛУ), второй вход которого соединен с выходом М, а выход - со входом РП.
Устройство формирования команды управления одноканальной вращающейся по углу крена ракетой, реализующее этот способ по второму варианту, по сравнению с известным устройством, содержащим последовательно соединенные ИПВС и М, а также ИУК, выход которого соединен со вторым входом М, и РП, снабжено последовательно соединенными ИПРС и ЛУ, второй вход которого соединен с выходом М, а выход - со входом РП, а также счетчиком импульсов, вход которого соединен с выходом ИУК, а выход - с третьим входом ЛУ.
Сущность предлагаемой группы изобретений заключается в следующем. Перед стартом ракету ориентируют по углу крена. Например, ракету контейнерного запуска устанавливают в строго определенном положении плоскости ее рулей относительно контейнерного разъема, жестко связанного с пусковой установкой, ориентированной, в свою очередь, относительно линии горизонта. В течение 0,25-0,5 первого периода вращения по углу крена (т.е. за малый промежуток времени) ракета не имеет большого разброса по этому углу относительно расчетного значения. Априорная информация об изменении угла крена позволяет сформировать сигнал управления соответствующим программно-временному сигналу и предварительно прогнозируемому сигналу крена (т.е. с учетом положения плоскости рулей).
Согласно прототипу программно-временной сигнал формирует команду компенсации динамической ошибки от действия силы тяжести, отклоняющую руль вверх. Для ракет с низкой начальной скоростью эта команда, как правило, максимальная (близкая к максимальной) с целью исключения (или минимизации) отклонений ниже линии визирования. До момента появления правильного сигнала крена (при отсутствии каких-либо специальных мер) формируется ложная команда управления, которая, в частности, может отклонять руль вниз, что приведет к отклонению ракеты вниз вплоть до соприкосновения с подстилающей поверхностью.
Согласно предлагаемой группе изобретений от момента старта ракеты до момента появления сигнала крена сигнал управления формируют соответствующим программно-временному сигналу и предварительно прогнозируемому сигналу крена, что обеспечивает отклонение руля преимущественно вверх.
Предлагаемая группа изобретений поясняется следующим графическим материалом, представленным на фиг.1-4.
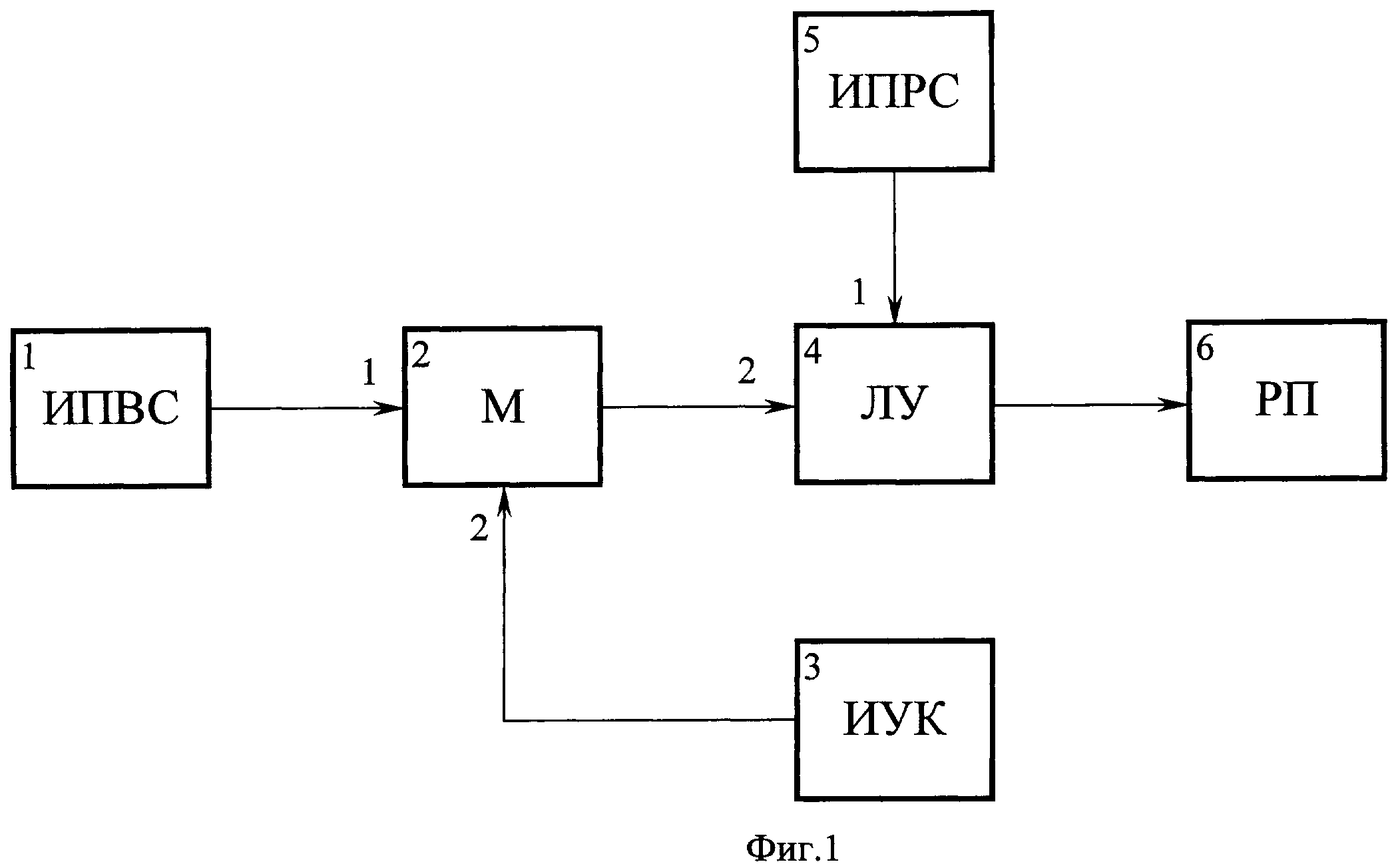
Структурная схема первого варианта предлагаемого устройства формирования команды управления ракетой приведена на фиг.1, где 1 - ИПВС, 2 - М, 3 - ИУК, 4 - ЛУ, 5 - ИПРС, 6 - РП.
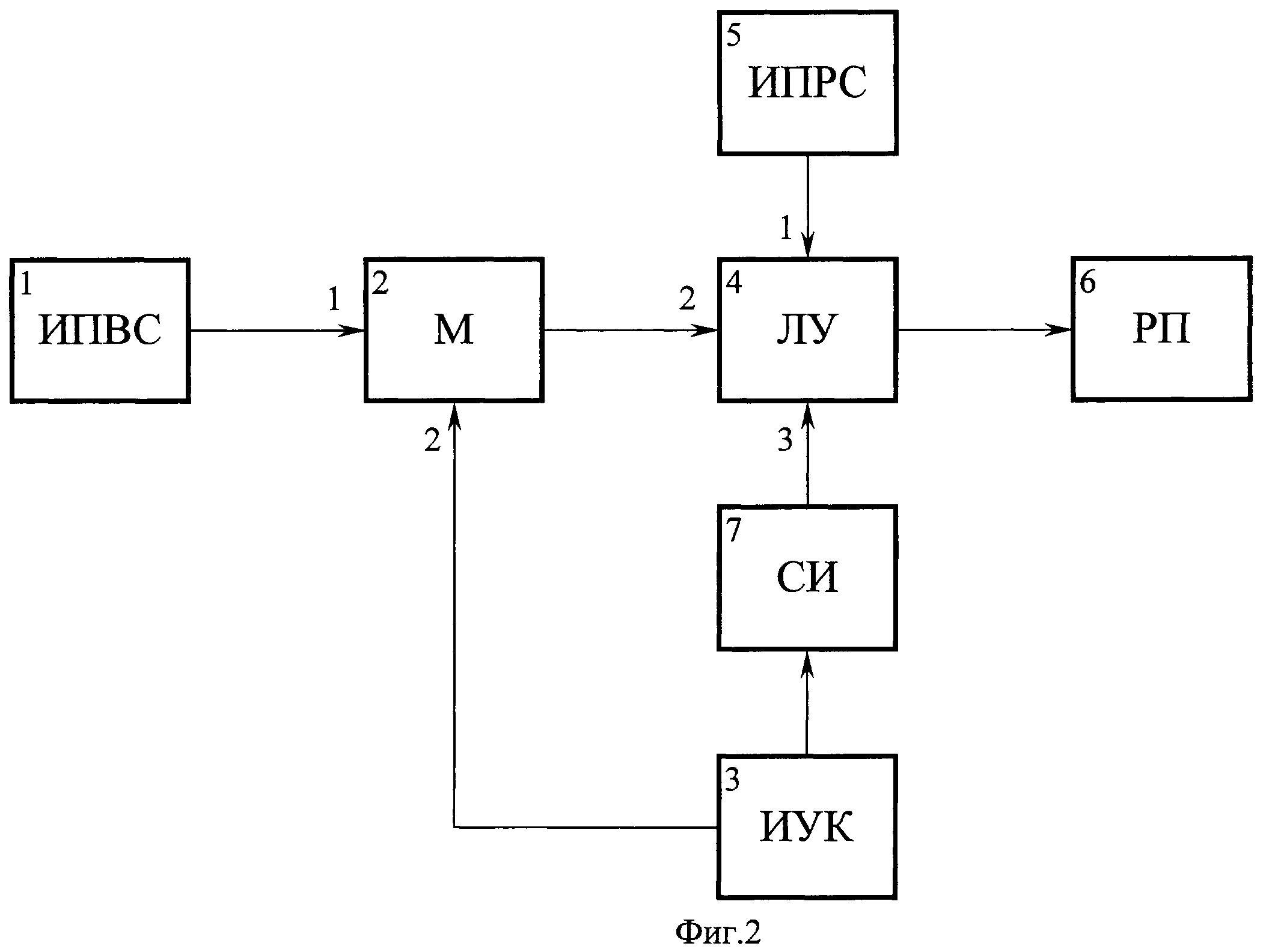
Структурная схема второго варианта предлагаемого устройства формирования команды управления ракетой приведена на фиг.2, где 1 - ИПВС, 2 - М, 3 - ИУК, 4 - ЛУ, 5 - ИПРС, 6 - РП, 7 - СИ.
На фиг.3, 4 представлены возможные варианты вида типового сигнала с выхода ИПРС 5.
Первый вариант устройства (фиг.1) работает следующим образом.
ИПВС 1 вырабатывает в течение времени полета t сигнал U(t) по расчетной программе для компенсации динамической ошибки.
Этот сигнал поступает на первый вход М 2, а на его второй вход приходит периодический сигнал частотой вращения ракеты по углу крена γ с выхода ИУК 3. М 2 осуществляет преобразование программного сигнала U(t) (модуляцию) в сигнал Uм(t) в связанной с ракетой вращающейся по углу крена системе координат. ЛУ 4, на первый вход которого поступает сигнал Vпр(t) с выхода ИПРС 5, а на второй вход - сигнал Uм(t) с выхода М 2, формирует сигнал V вида:
где tн - момент появления сигнала крена, определяемый расчетом и зафиксированный в ЛУ до пуска.
Второй вариант предлагаемого устройства (фиг.2) работает аналогично первому в части формирования и передачи сигналов между блоками ИПВС 1, М 2 и ИУК 3. Сигнал с выхода СИ 7, формируемый согласно зависимости:
 ;
;
где n - число импульсов дискретного ИУК 3 (Патент RU №2283466, МПК F41G 7/00, F42B 15/01, H03K 4/00 (2006.01), 29.03.2005), поступает на третий вход ЛУ 4. Выходной сигнал ЛУ 4 с тремя входами имеет вид:
 ,
,
т.е. во втором варианте устройства, в отличие от первого, управление работой РП программным сигналом Vпр(t) происходит до момента появления второго импульса с выхода ИУК 3, определяющего момент фиксации появления сигнала крена.
Программный сигнал Vпр(t) для простоты реализации задается релейным двухпозиционным, причем уровни этого сигнала устанавливают соответствующими максимальному отклонению руля (его положению на упоре), что целесообразно при применении в ракете как релейного, так и пропорционального или автоколебательного РП.
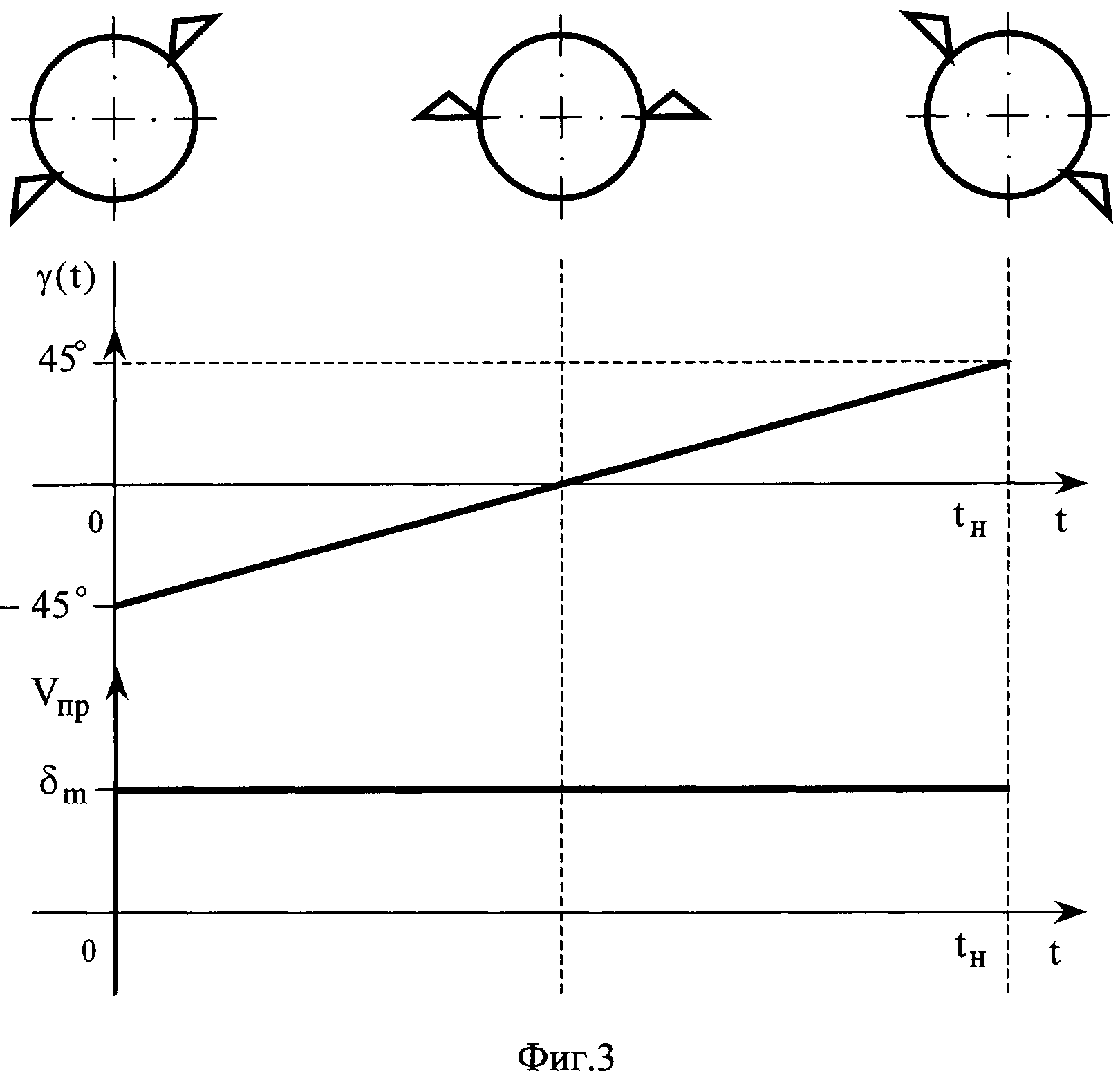
В наиболее простом случае, когда с момента старта ракеты до момента фиксации tн руль в одноканальной ракете создает управляющий момент в вертикальной плоскости, программный сигнал Vпр(t) формируют в виде одного постоянного уровня, соответствующего максимальному отклонению руля вверх. На фиг.3 представлен такой случай, где угловая скорость изменения угла γ(t) крена условно принята постоянной. Показано, что в течение четверти оборота по крену руль постоянно отклонен вверх, причем угол γ(t)=0 соответствует горизонтальному положению руля, в котором вектор управляющего момента направлен строго вверх.
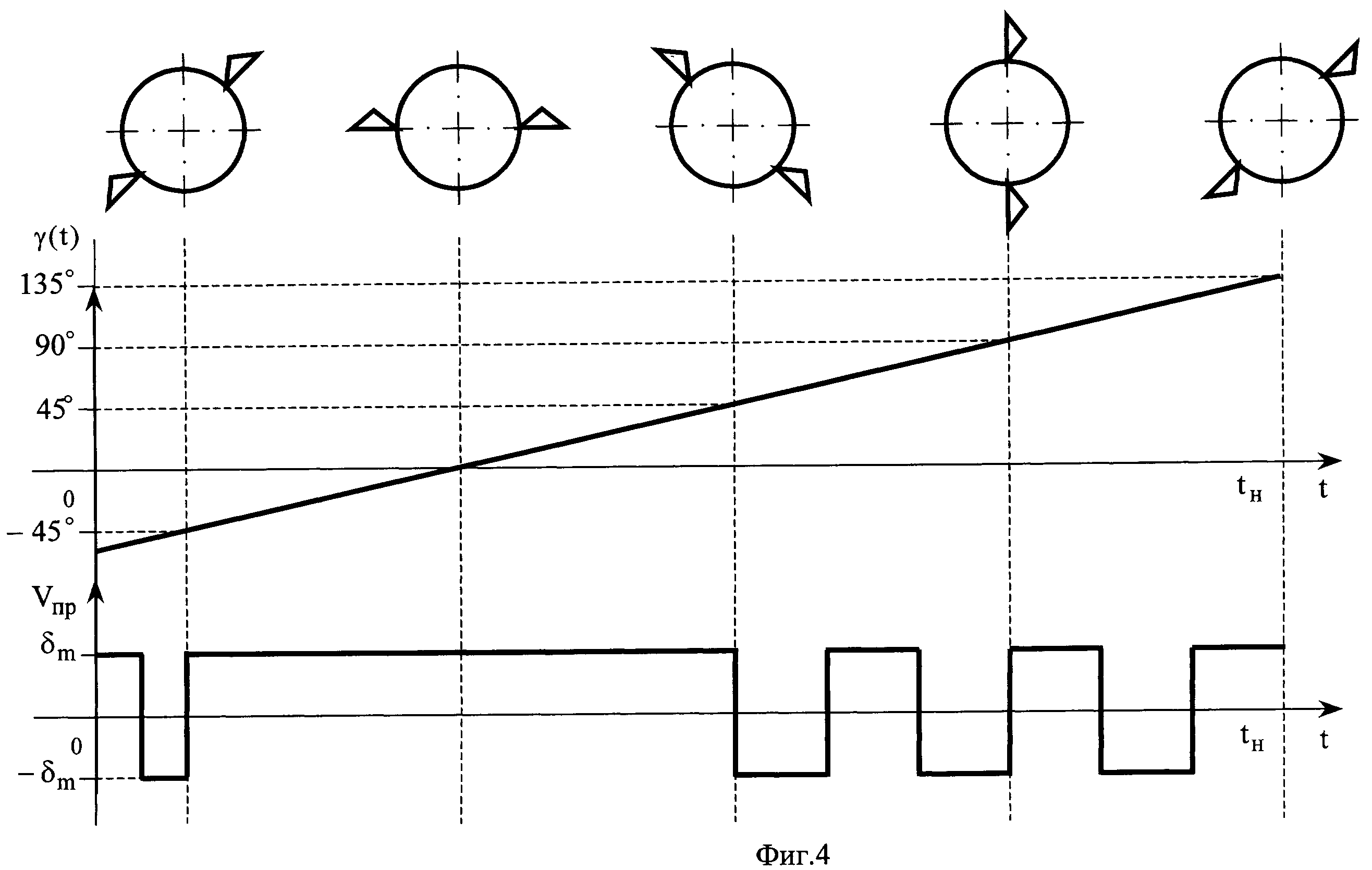
Сигнал Vпр(t) может иметь более сложный вид с несколькими переключениями уровней (фиг.4), обеспечивая при этом формирование сигнала управления, создающего максимальную (или близкую к максимальной) команду вверх в вертикальной плоскости (в диапазоне углов - 45°<γ(t)<45°) и близкую к нулевой команду в горизонтальной плоскости (в диапазоне углов -45°>γ(t) и 45°<γ(t)<135°).
Вид программного сигнала Vпр(t), реализуемого в ИПРС 5, определяется априорно на основе расчетной зависимости текущего значения угла крена ракеты γ(t), по которой устанавливаются требуемые моменты переключения сигнала Vпр(t).
Сигнал V с выхода ЛУ 4 представляет собой команду управления РП 6, который преобразует ее в соответствующее отклонение руля. При этом в промежуток времени от момента старта ракеты до момента фиксации появления сигнала крена релейный сигнал управления в представленных примерах реализации предлагаемого способа обеспечивает максимальное отклонение руля вверх, а после этого момента сигнал управления формируется согласно известному способу.
В качестве ИПВС, М, ИУК, РП могут быть использованы блоки, представленные в ближайшем аналоге.
В качестве ЛУ, ИПРС могут быть использованы схемы, представленные в книге Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для ABM. М.: Энергия, 1978, с.123.
В качестве СИ может быть использована схема, представленная в патент RU №2283466, МПК F41G 7/00, F42B 15/01, Н03К 4/00 (2006.01), 29.03.2005.
ЛУ, ИПРС, СИ могут быть также реализованы на программном уровне с помощью микропроцессорных структур, например на микропроцессоре типа 1830 BE 31.
Таким образом, предлагаемые способ и варианты устройства позволяют повысить точность наведения вращающихся по крену ракет за счет их ориентации перед стартом по углу крена и формирования на начальном участке наведения команды, отклоняющей руль вверх на основе априорной информации об изменении угла крена ракеты, с целью исключения (или минимизации) отклонений ниже линии визирования во избежание соприкосновения с подстилающей поверхностью. Предлагаемая совокупность технических решений может быть также использована для компенсации динамических ошибок в горизонтальной плоскости, например, от действия бокового ветра и вращения линии визирования.
Комплекс вооружения
Универсальный боевой модуль
Способ наведения вращающейся ракеты с релейным приводом рулевого органа и система для его осуществления
Станок
Комплекс вооружения
Способ управления ракетой и система управления для его осуществления
Способ телеуправления ракетой
Снаряд
Управляемый снаряд
Двигательная установка реактивной системы управления летательного аппарата
Комплекс вооружения
Универсальный боевой модуль
Способ наведения вращающейся ракеты с релейным приводом рулевого органа и система для его осуществления
Станок
Комплекс вооружения
Способ управления ракетой и система управления для его осуществления
Способ телеуправления ракетой
Снаряд
Управляемый снаряд
Двигательная установка реактивной системы управления летательного аппарата

