Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ИНФОРМАЦИИ О ПОЕЗДЕ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к области автоматической идентификации информации о пассажирских и товарных поездах.
Предпосылки создания изобретения
В Китае есть два патентных документа, которые непосредственно относятся к способу и системе для автоматической идентификации информации о поездах, раскрытых в настоящем изобретении. Один из этих документов имеет название "ОБОРУДОВАНИЕ ДЛЯ РАЗЛИЧЕНИЯ ПАССАЖИРСКОГО ПОЕЗДА ОТ ТОВАРНОГО ПОЕЗДА СПОСОБОМ РАСЧЕТА РАССТОЯНИЯ МЕЖДУ ВАГОНАМИ" (СN 1164449 (С), по которому 1 сентября 2004 года был выдан патент под номером 02117867.4. Оборудование для различения пассажирского поезда от товарного поезда способом расчета расстояния между вагонами отличается тем, что в нем используются двухколесные пассивные магнитные датчики, чтобы определить общую длину проверяемых вагонов, которые динамически выдают данные о числе промежутков между вагонами с использованием фотоэлектрических датчиков, установленных между ними. Так как вагоны пассажирского поезда соединены друг с другом и свет от датчиков не может пройти через них, единственный импульс, который может быть сформирован, возникает из промежутка между локомотивом и первым вагоном. В противоположность этому, между двумя товарным вагонами имеется промежуток приблизительно в полметра. Следовательно, в пределах общей длины вагонов, определенных вышеупомянутыми двумя магнитными датчиками, поезд может быть идентифицирован как товарный поезд, когда число импульсов от промежутков подсчитано как большее или равное предопределенному пороговому числу промежутков, в противном случае мы имеем дело с пассажирским поездом. Начало и конец операции счета определяются поступающим от колес сигналом, посылаемым двумя указанными магнитными датчиками.
Второй патентный документ называется "СПОСОБ И СИСТЕМА ДЛЯ РАЗЛИЧЕНИЯ ПАССАЖИРСКОГО ПОЕЗДА ОТ ТОВАРНОГО ПОЕЗДА СПОСОБОМ ОПРЕДЕЛЕНИЯ ИНТЕРВАЛА МЕЖДУ КОЛЕСАМИ" (CN 1151045 (C), по которому был получен патент от 26 мая 2004 года под номером 02117863.1. Способ и система для различения пассажирского поезда от товарного поезда способом определения интервала между колесами включают использование 4 магнитных датчиков и основан на том факте, что интервал между двумя группами колес пассажирского поезда больше такого интервала товарного поезда. Указанные 4 магнитных датчика устанавливаются у каждого рельса на стороне поверхности обнаружения вдоль входящего направления поезда и включают одну пару магнитных датчиков для идентификации интервала между двумя колесами, у которых расстояние между центрами равно расстоянию между центрами группы колес, при этом один магнитный датчик экранирует локомотив и формирует сигнал начала распознавания, а другой магнитный датчик служит для обнаружения прибытия локомотива, заканчивая распознавание и считывая результат. Если два магнитных датчика для идентификации интервала между двумя колесами получают импульс прибытия колеса в один и тот же момент, он может определить, что поезд - товарный поезд, в противном случае это пассажирский поезд.
Иногда, чтобы транспортировать товары большой длины, например стволы деревьев, две плоские платформы соединяются вместе. В такой ситуации первый способ в известном уровне техники для определения, является ли это пассажирским поездом или товарным поездом, является ненадежным. Кроме того, на фотоэлектрический датчик влияют условия эксплуатации, такие как солнечные лучи, дождь, снег и насекомые, и такой датчик склонен к неверным показаниям. Что касается второго способа, он может быть понят следующим образом: если колесная база тележки больше определенного значения, состав определяется как пассажирский поезд или как товарный поезд, если эта величина меньше определенного значения. В этом способе предъявляются более высокие требования к месту размещения датчиков, и он весьма ограничен по типам поездов. Кроме того, ни один из этих способов не может точно определить скорость проходящего поезда, информацию по сегментации, информацию обнаружения или тому подобное.
Краткое описание изобретения
Цель настоящего изобретения состоит в том, чтобы обеспечить улучшенный способ и систему для автоматической идентификации различной информации о поезде, которая предоставляют различные данные о проходящем поезде, измеряя скорость и колесные базы поезда с помощью датчиков обнаружения колес, установленных на железной дороге, с последующим анализом в реальном времени и обработкой данных о скорости и колесных базах поезда. Целью настоящего изобретения является разработать способ для получения информации о прибытии отправлении поезда; способ для получения информации о типе поезда; способ для получения информации о местоположении крюка поезда и способ для получения информации о нумерации вагонов поезда.
Техническое решение по настоящему изобретению содержит:
(1) Способ для определения прибытия и отправления поезда содержит
(i) установку массива датчиков вдоль одного рельса, при этом массив содержит первую, вторую и третью группы датчиков четного направления, установленных в одном порядке, и первую, вторую и третью группы датчиков нечетного направления, установленных в противоположном порядке, в котором каждая из указанных групп содержит, по меньшей мере, два датчика;
(ii) вычисление скорости и колесных баз поезда, используя сигнал от первой группы датчиков четного/нечетного направления, и сегментацию вычисленных колесных баз, используя известное правило сегментации потока в системной базе данных;
(iii) определение типа вагонов, соответствующих сегментированным колесным базам, используя известное правило различения типа вагонов в системной базе данных, и если локомотив определен, и число считанных колесных баз постоянно превышает максимальное число колесных баз известного локомотива, делается вывод о прибытии поезда; и
(v) текущий контроль промежутков времени между импульсными сигналами колес, подаваемых соответствующими группами датчиков, если время окончания импульсных сигналов любой группы датчиков превышает максимальный промежуток времени, определяемый максимальной колесной базой вагона и заданной минимальной скоростью движения поезда, решено, что сигнал указанной группы датчиков прерван, и если сигналы всей группы датчиков больше не подаются, решено, что поезд отправлен.
(2) Способ обеспечения информации о сегменте поезда, содержащий
(i) установку массива датчиков вдоль одного рельса, при этом массив содержит первую, вторую и третью группы датчиков четного направления, установленных в одном порядке, и первую, вторую и третью группы датчиков нечетного направления, установленных в противоположном порядке, в котором каждая из указанных групп содержит, по меньшей мере, два датчика;
(ii) вычисление скорости и колесных баз поезда, используя сигнал от первой группы датчиков четного/нечетного направления, и сегментацию вычисленных колесных баз, используя известное правило сегментации потока в системной базе данных;
(iii) определение типа вагонов, соответствующих сегментированным колесным базам, используя известное правило различения типа вагонов в системной базе данных.
(3) Способ обеспечения информации о местоположении крюка поезда, содержащий
(i) установку массива датчиков вдоль одного рельса, при этом массив содержит первую, вторую и третью группы датчиков четного направления, установленных в одном порядке, и первую, вторую и третью группы датчиков нечетного направления, установленных в противоположном порядке, в котором каждая из указанных групп содержит, по меньшей мере, два датчика;
(ii) использование сигнала от второй/третьей группы (S2/X3) датчиков четного/нечетного направления, соответственно, чтобы вычислить скорость и колесные базы поезда, и сегментация вычисленной колесной базы, используя известное правило сегментации потока в системной базе данных;
(iii) в случае товарного поезда, считывание времени, в течение которого второе колесо второго вагона двух последовательных сегментированных вагонов достигает позиции второй/третьей группы датчиков четного/нечетного направления, соответственно обеспечивая таким образом информацию о местоположении крюка, содержащую заданное время задержки использования рентгеновской системы;
(v) в случае пассажирского/товарного поезда, считывание времени, в течение которого второе колесо второго вагона двух последовательных сегментированных вагонов достигает позиции третьей/второй группы датчиков четного/нечетного направления, соответственно обеспечивая таким образом, информацию о местоположении крюка, заданные задержки для использования фотографической системой.
(4) Способ обеспечения информации о нумерации поезда, содержащий
(i) установку массива датчиков вдоль одного рельса, при этом массив содержит первую, вторую и третью группы датчиков четного направления, установленных в одном порядке, и первую, вторую и третью группы датчиков нечетного направления, установленных в противоположном порядке, в котором каждая из указанных групп содержит, по меньшей мере, два датчика;
(ii) использование сигнала от второй/третьей группы датчиков четного/нечетного направления, соответственно, чтобы вычислить скорость и колесные базы поезда, и сегментацию вычисленных колесных баз, используя известное правило сегментации потока в системной базе данных;
(iii) чтение номеров вагонов от электронных тегов на сегментированных вагонах последовательно устройством чтения четных/нечетных номеров вагонов и определение, что электронный тег, считываемый максимальное число раз, принадлежит вагону, проходящему над устройством чтения номеров вагонов.
(5) Способ обеспечения информации идентификации поезда, содержащий
(i) установку массива датчиков вдоль одного рельса, при этом массив содержит первую, вторую и третью группы датчиков четного направления, установленных в одном порядке, и первую, вторую и третью группы датчиков нечетного направления, установленных в противоположном порядке, в котором каждая из указанных групп содержит, по меньшей мере, два датчика;
(ii) в сигнале первой группы датчиков четного/нечетного направления, если сигнал от группы датчиков четного направления поступит первым, то можно определить, что это четный поезд, в противном случае это нечетный поезд, и сигнал от первой группы датчиков четного/нечетного направления используется, чтобы вычислить скорость и колесные базы поезда, а известное правило сегментации потока в системной базе данных используется для сегментации колесных баз;
(iii) используется известное правило различения потока в базе данных, чтобы определить тип вагонов, соответствующих сегментированным колесным базам, и если определено, что один вагон является локомотивом и число считываемых колесных баз превышает максимальное число колесных баз известного локомотива, определяется, что прибывает четный/нечетный поезд, предоставляя таким образом первую информацию о прибытии четного/нечетного поезда;
(v) последовательно определяются типы этих двух вагонов позади указанного локомотива, и если, по меньшей мере, один из них является пассажирским вагоном, определяется, что этот поезд - пассажирский поезд, в противном случае это товарный поезд, предоставляя таким образом вторую информацию о прибытии поезда, являющегося пассажиром/товарным поездом;
(V) для товарного поезда считывается момент времени, в который второе колесо второго из двух последовательных вагонов достигает позиции второй/третьей группы датчиков четного/нечетного направления, соответственно предоставляя таким образом третью информацию о местоположении крюка поезда, которая включает заданную задержу времени и предназначена для использования рентгеновской системой досмотра;
(vi) чтение номеров вагонов из электронных тегов на сегментированных вагонах последовательно устройством чтения четных/нечетных номеров вагонов и определение, что электронный тег, считываемый максимальное число раз, принадлежит вагону, проходящему над устройством чтения номеров вагонов, предоставляя таким образом четвертую информацию о номере каждого вагона;
(vii) для пассажирского/товарного поезда считывается момент времени, в который второе колесо второго из двух сегментированных вагонов достигает позиции второй/третьей группы датчиков четного/нечетного направления, соответственно предоставляя таким образом пятую информацию о местоположении крюка транспортного средства, которая включает заданную задержку времени и служит для использования фотографической системой;
(viii) текущий контроль промежутков времени между импульсами соответствующих колес от соответствующих групп датчиков, и если конечное время импульса сигнала от любой группы датчиков превышает максимальный промежуток времени, определяемый максимальной базой вагона и заданной минимальной скоростью поезда, определяется, что сигнал от указанной группы датчиков прерван, и если сигналы от всей группы датчиков больше не подаются, будет выдана шестая информация об отправлении поезда.
(6) Система для автоматической идентификации информации о поезде, содержащая
массив датчиков, установленных вдоль рельса, включая три группы датчиков четного направления, установленных в одном порядке, и три группы датчиков нечетного направления, установленных в противоположном порядке, при этом каждая из указанных групп содержит, по меньшей мере, два датчика;
блок формирования сигнала, соединенный с массивом датчиков, содержащий средство для преобразования сигналов от датчиков в последовательность регулярных импульсных сигналов;
плату сбора данных, соединенную с блоком формирования сигналов, включающую средство для вычисления скорости и колесных баз поезда по сигналам датчиков;
устройство чтения номеров вагонов, включающее средство чтения четных и нечетных номеров вагонов, смонтированное между рельсами и используемое для считывания информации с электронных тегов, закрепленных на вагонах поезда;
промышленный компьютер, соединенный с платой сбора данных и с устройством чтения номеров вагонов, включающее средство для выполнения стадий (ii)-(iii) вышеупомянутого способа, чтобы обработать скорость, информацию о колесных базах с электронных тегов, получая таким образом информацию о поезде, данные о прибытии четного/нечетного поезда, данные о том, прибывает ли пассажирский поезд или товарный поезд, месторасположение крюков поезда, число вагонов и отправление поезда.
Преимущества изобретения
По сравнению со способом расчета промежутка между вагонами в известном уровне техники способ и система для автоматической идентификации различной информации о поезде согласно настоящему изобретению не зависят от формы вагона поезда и товаров, которые перевозит поезд. Кроме того, колесный датчик, используемый в настоящем способе и системе, является пассивным датчиком, и в отличие от фотоэлектрического датчика, на который влияют условия эксплуатации, такие как солнечные лучи, датчик по настоящему изобретению, в основном, не подвержен влиянию солнечных лучей, дождя, снега и других факторов окружающей среды.
По сравнению со способом измерения пространства между колесами способ и система по настоящему изобретению не только используют колесную базу одной оси вагона, но также и собирают колесные базы всех колес поезда и выполняют их всесторонний анализ. Используя технологию базы данных, настоящий способ и система могут различать пассажирский вагон, товарный вагон и локомотив с очень высокой точностью при условии выполнения различных основных правил по идентификации, установленных настоящим изобретением. В то же время предложенный способ устраняет недостаток способа измерения пространства между колесами в известном уровне техники, у которого установлены строгие требования для интервала, под которым установлены датчики.
Кроме того, методика сегментации и определения местоположения, используемая в этом способе, не раскрыта в вышеупомянутых двух документах известного уровня техники. Настоящее изобретение, в сочетании с устройством чтения номеров вагонов, рентгеновской системой сканирования или фотографической системой, может быть применена к таким областям, как досмотр товарного поезда, информационный охват железной дороги и так далее.
Описание чертежей
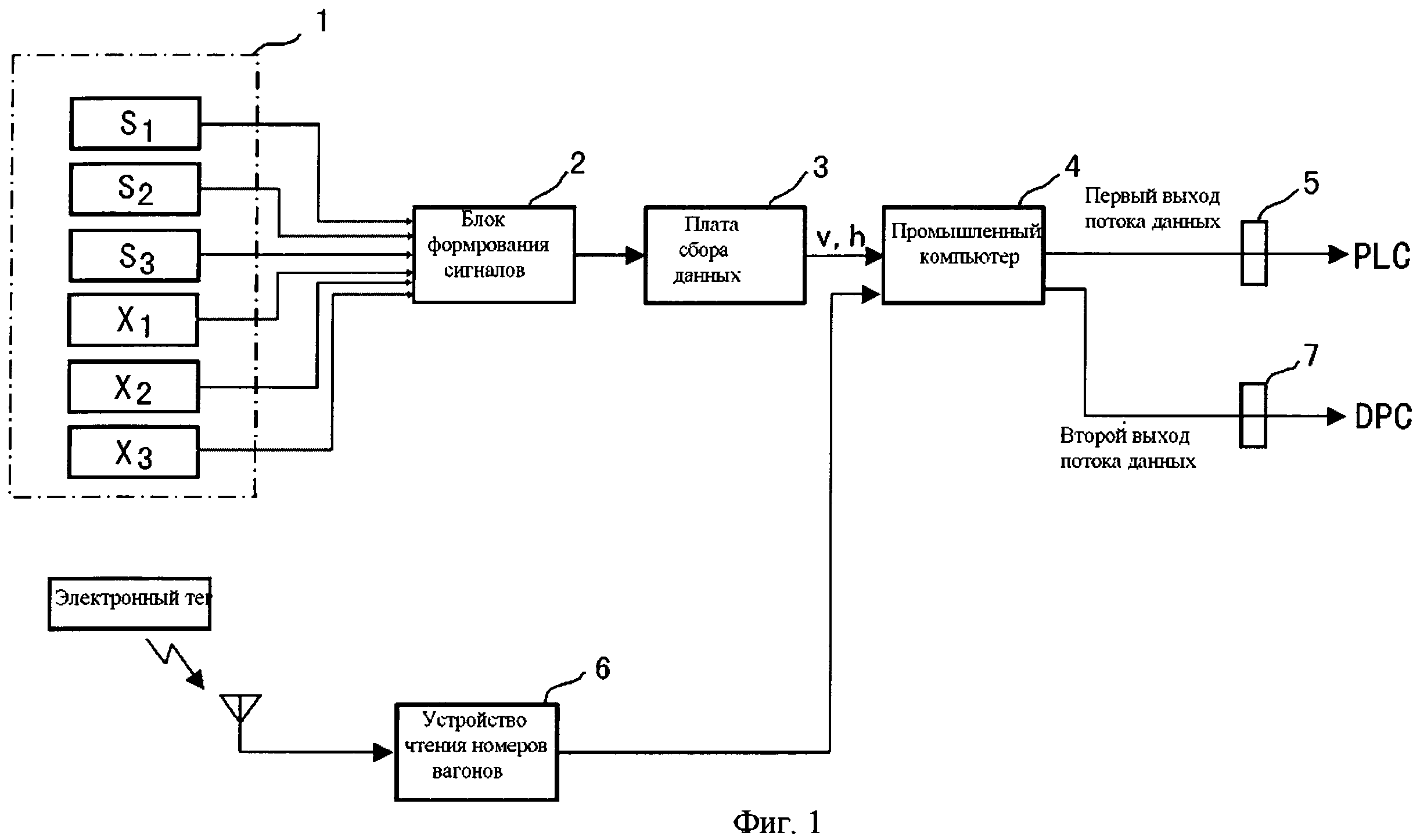
Фигура 1 - блок-схема, иллюстрирующая структуру и принцип работы системы автоматической идентификации поезда согласно настоящему изобретению.
Фигура 2 - схема, иллюстрирующая положение для установки массива датчиков и устройства чтения номеров вагонов системы по настоящему изобретению, причем эта схема также иллюстрирует принцип части рабочего процесса по настоящему изобретению.
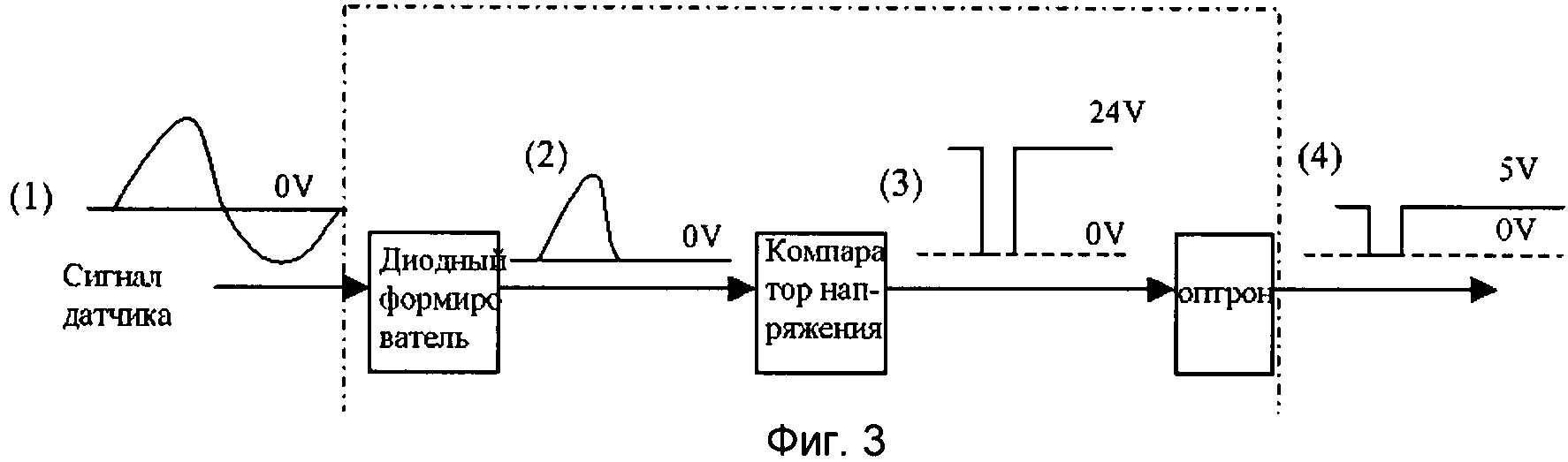
Фигура 3 - схема, иллюстрирующая принцип работы блока формирования сигнала в системе по настоящему изобретению.
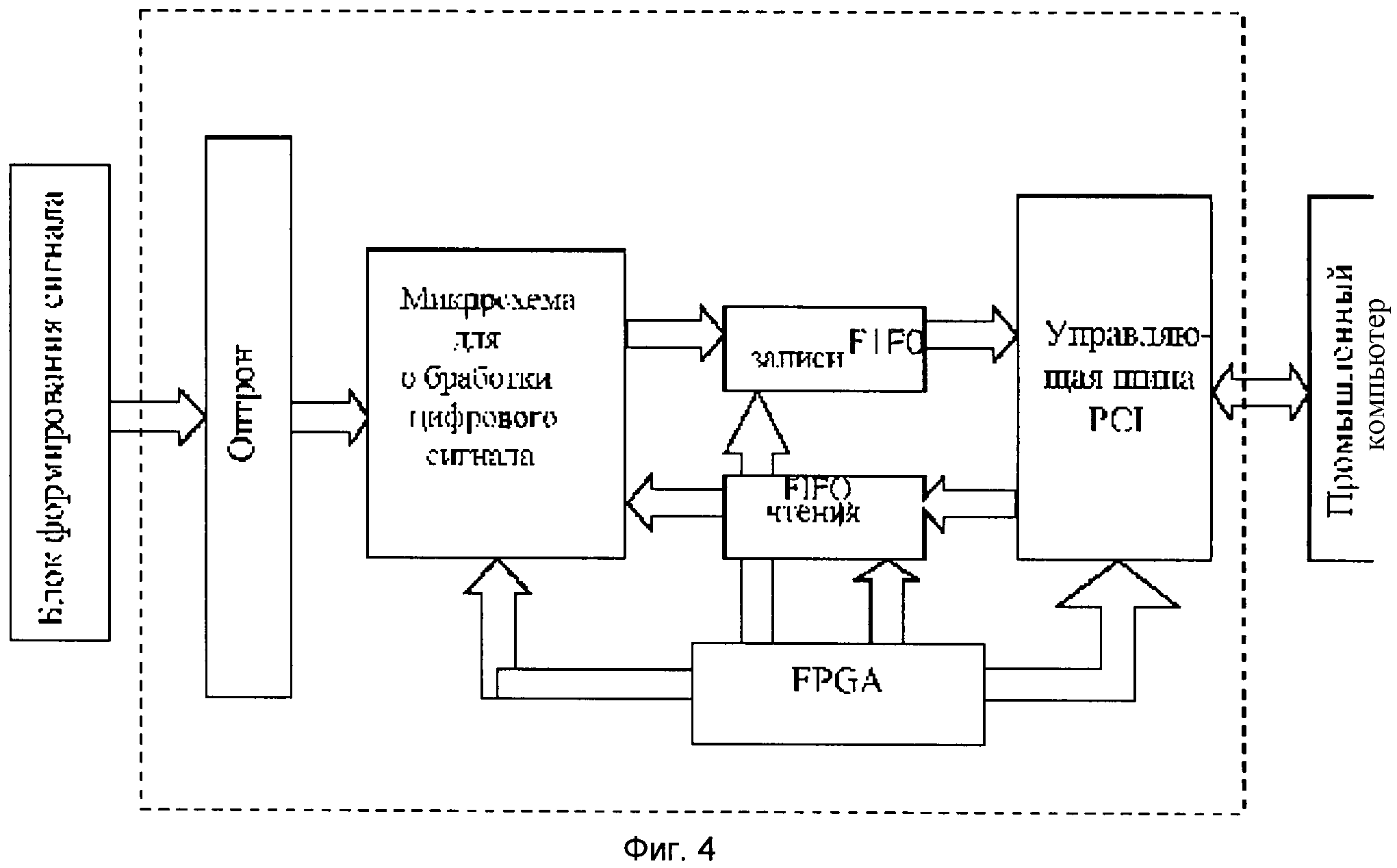
Фигура 4 - схема, иллюстрирующая принцип работы платы сбора данных в системе по настоящему изобретению.
Фигура 5 - схема, иллюстрирующая поток информации для автоматический идентификации поезда, создаваемый промышленным компьютером в системе по настоящему изобретению.
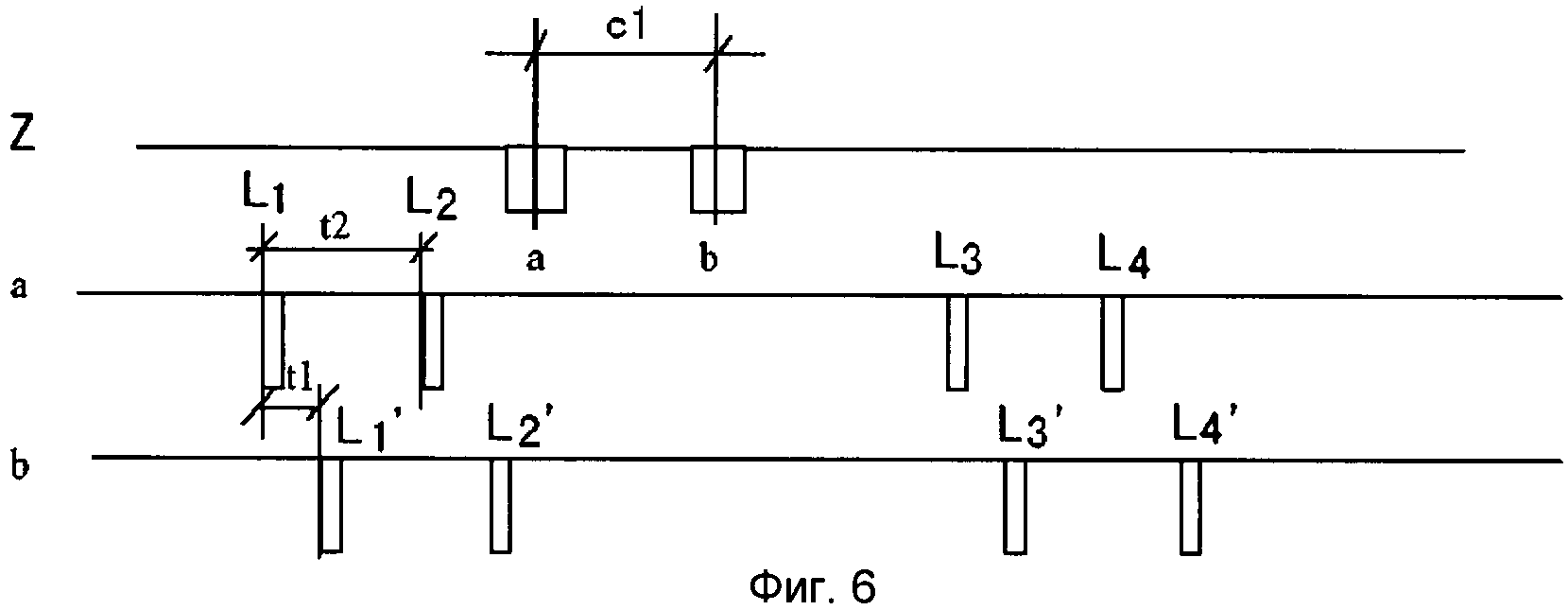
Фигура 6 - схема, иллюстрирующая принцип вычисления скорости движения поезда и колесных баз системой по настоящему изобретению.
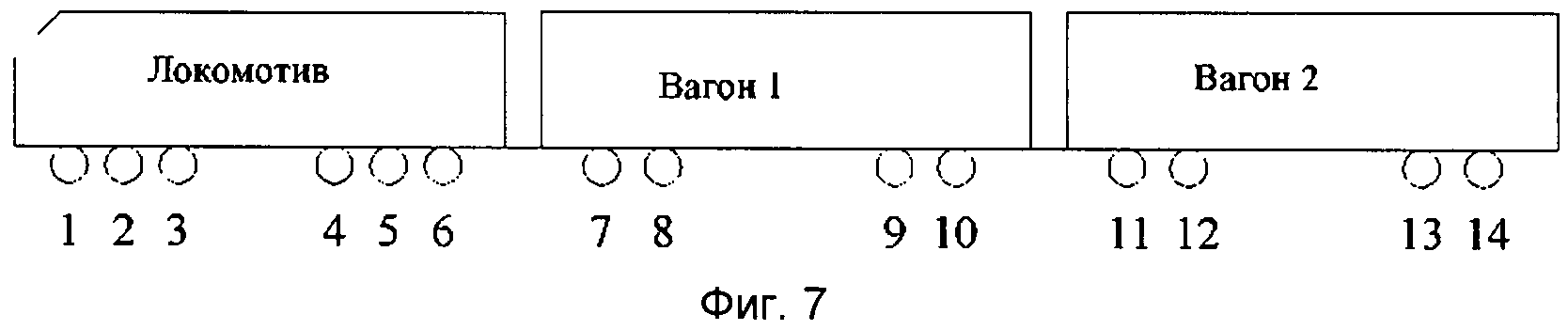
Фигура 7 - схема, иллюстрирующая принцип процесса сегментации поезда системой по настоящему изобретению.
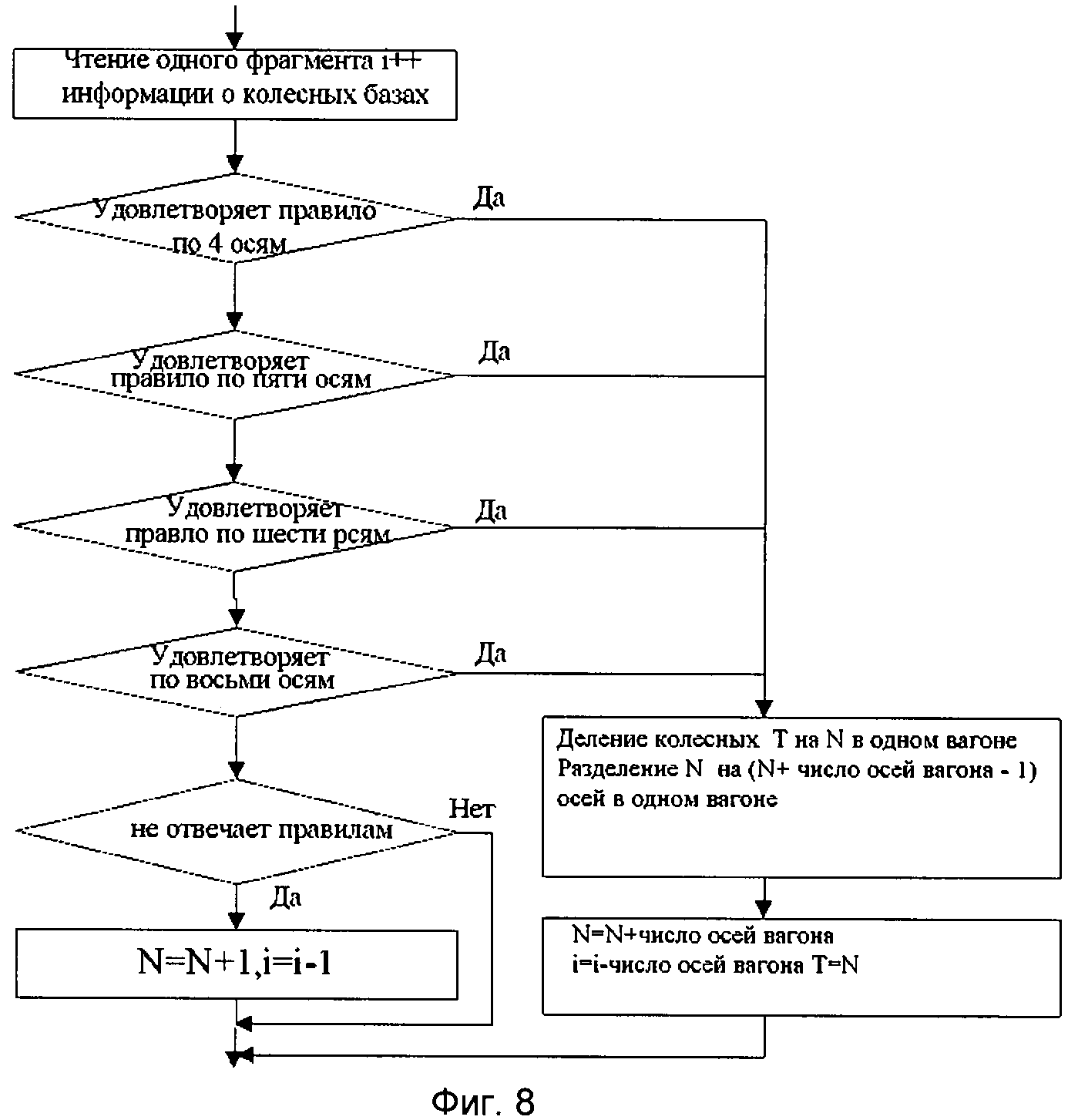
Фигура 8 - блок-схема, иллюстрирующая процесс сегментации поезда системой по настоящему изобретению.
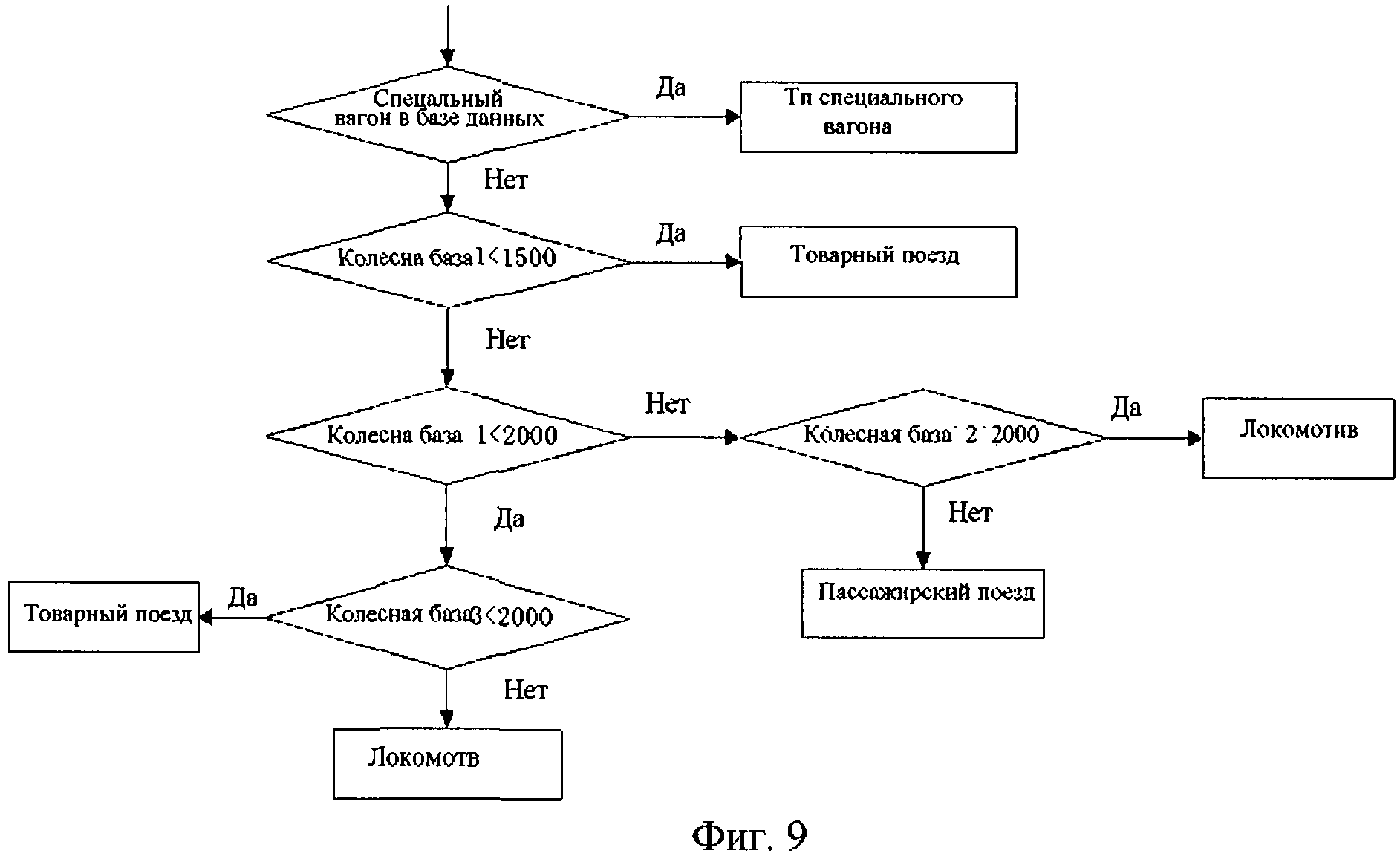
Фигура 9 - блок-схема, иллюстрирующая определение типа вагона системой по настоящему изобретению.
Фигура 10 - схема, иллюстрирующая принцип процесса определения местоположения крюка поезда в системе по настоящему изобретению.
Фигура 11 - схема вывода данных с последовательного порта системы по настоящему изобретению.
Описание изобретения
Система досмотра товарного поезда, упомянутая в этом описании, является довольно продвинутой современной рентгеновской системой сканирования для досмотра товаров товарного поезда, включающая фотографическую систему, которая действует как подсистема указанной системы досмотра. Указанная система досмотра товарного поезда в процессе работы, во-первых, выдает точную информацию, обеспечиваемую настоящим изобретением согласно принципу ее работы и техническим требованием, а именно, она должна заранее определить тип поезда, который должен пройти через систему досмотра. Когда проходящий поезд - товарный поезд, рентгеновская установка для выполнения сканирования активизируется только после того, как локомотив поезда полностью прошел через центр потока рентгеновских лучей системы досмотра. Работа системы досмотра в дальнейшем должна быть скорректирована в режиме реального времени в зависимости от скорости проходящего поезда. Когда каждый сегмент поезда (т.е. каждый вагон поезда) проходит через центр потока лучей, система по настоящему изобретению сегментирует сканируемое изображение поезда согласно информации по сегментации для получения номера каждого вагона, считывая данные, обеспечиваемые устройством чтения номеров вагонов. Указанная информация важна для системы досмотра товарного поезда.
Теперь примеры воплощения настоящего изобретению будут описаны со ссылками на приложенные чертежи.
Фигура 1 - блок-схема, иллюстрирующая структуру и принцип действия системы автоматической идентификации поезда согласно настоящему изобретению. На фигуре 1 позиция 1 обозначает массив датчиков. Массив состоит из множества групп датчиков. Каждая из указанных групп содержит определенное число датчиков. Согласно принципу настоящего изобретения, например, могут быть созданы шесть групп датчиков, при этом каждая группа состоит из трех датчиков. Альтернативно, согласно принципу настоящего изобретения число групп и число датчиков в каждой группе могут быть различными. Принцип конфигурирования массива датчиков в настоящем изобретении может быть понят из следующего описания. На фигуре 1 показаны блок формирования сигнала 2, плата сбора данных 3, промышленный компьютер 4 (который получает данные о скорости движения поезда V и колесной базе h, вычисленные в плате сбора данных 3), последовательный порт 5 для получения первого потока выходных данных от промышленного компьютера 4 и для вывода этих данных в программируемый логический блок управления системы досмотра поезда (PLC), сетевой порт 7 для получения второго потока выходных данных от промышленного компьютера 4 и его передачи в центр обработки данных системы досмотра поезда (DPC) и устройство чтения номеров вагонов 6 для приема антенной сигналов, переданных электронными тегами, закрепленных на вагонах поезда. Эти компоненты будут описаны ниже более подробно.
Массив датчиков установлен на одной из двух сторон рельса вблизи пункта управления системой так, чтобы кабели не пересекали рельсы. Как показано на фигуре 2, имеются три группы (S1, S2, S3), при этом каждая группа состоит из трех датчиков, в которых два рабочих датчика и один резервный. Из шести групп датчиков по настоящему изобретению три установлены на внутренней стороне рельса и получают информацию, генерируемую поездом, движущимся по направлению слева направо (четный поезд), в то время как другие три группы (Х1, Х2, Х3) также установлены на рельсе, чтобы получать сигналы, генерируемые поездом, движущимся по направлению справа налево (нечетный поезд). В одной группе датчиков, например группе S1, интервал между соответствующими датчиками S11, S12, S13 лежит в диапазоне приблизительно 10-1200 мм (определяется минимальной колесной базой товарного вагона и фактическим расстоянием между двумя шпалами). Поскольку источнику рентгеновских лучей (О) системы необходим период стабилизации потока лучей прежде чем начать сканирование, расстояние между группой S1 датчиков и источником рентгеновских лучей (О), так же как между группой Х1 датчиков и источником рентгеновских лучей (О) не должны быть меньше, чем величины расстояния, вычисленные на основе максимальной скорости движения поезда и времени для стабилизации потока лучей системы досмотра товарных поездов. Например, в одном примере воплощения указанная величина может составлять d1=d7=3000-700000 мм. Расстояние d4 между фотографической системой (Р) и источником рентгеновских лучей (О) определяется по фактической ситуации на 'месте, при этом фотографическая система Р может быть установлена в любом месте между S1 и Х1. Минимальные значения расстояния d2/d5 между 2/3 группой (S2/S3) датчиков четного направления и источником рентгеновских лучей (O)/фотографической системой (Р) и расстояние d3/d6 между 3/2 группой (Х3/Х2) датчиков нечетного направления и источником рентгеновских лучей (O)/фотографической системой (Р) определяются расстоянием от второй оси товарного вагона до центра ближайшего крюка. Например, в настоящем изобретении указанное расстояние установлено равным d2=d3=d5=d6=3000-4500 мм. Здесь расстояние от второй оси указанного товарного вагона до центра ближайшего крюка, а именно, когда вторая ось каждого вагона поезда, движущегося в направлении к центру, прибывает точно к S2 и S3, между точкой О и точкой Р или крюком сцепки двух вагонов, или когда вторая ось каждого вагона поезда, движущегося в направлении от центра прибывает точно к Х2 и Х3 между точкой Р и точкой О, что является крюком сцепки двух вагонов. Кроме того, как показано на фигуре 2, RF1 и RF2 - антенны устройства чтения номеров вагонов (устройство чтения номеров вагонов показано в позиции 6 на фигуре 1), установленного на земле между двумя рельсами для четного направления (а именно, направления слева направо на фигуре) и нечетного направления (а именно, направления справа налево на фигуре) движения поезда соответственно. Электронный тег на вагоне обычно устанавливается на любом конце вагона. Устройства чтения четных/нечетных номеров вагонов установлены симметрично на четной/нечетной сторонах источника рентгеновских лучей О соответственно, причем минимальная величина расстояния между ними определяется так, чтобы не только уменьшить взаимные помехи, но и увеличить вероятность чтения. В настоящем изобретении, например, расстояния d8 между RF1 и точкой О и d9 между RF2 и точкой О установлены равными в диапазоне приблизительно 100-500 мм. На фигуре 2 О и Р соответственно представляют источник рентгеновских лучей и фотографическую систему досмотра товарного поезда, установленную на месте, в то время как А и В, соответственно, представляют позиции для запуска системы досмотра в четных и нечетных направлениях, а именно позиции, в которых передается детерминированный сигнал, который представляет прибытие четного/нечетного поезда.
На фигуре 2 показан случай, когда поезд движется слева направо. Поскольку принцип работы датчиков подобен магниту, когда каждое колесо локомотива и вагона поезда последовательно проходит группы датчиков S1, S2, S3, колесо обрезает магнитную силовую линию магнита датчика. Затем указанные датчики выдают сигналы напряжения, амплитуды которых являются различными в зависимости от разных скоростей поезда, обеспечивая таким образом три последовательности сигналов датчика. Указанные последовательности сигналов датчика передаются через линии передачи в блок формирования сигнала 2, который установлен в аппаратном шкафу автоматической системы идентификации информации о поезде по настоящему изобретению, которая расположена рядом с группами датчиков и надлежащим образом обрабатывает сигналах различных амплитуд и формы волны.
На фигуре 3 представлена схема, иллюстрирующая принцип работы блока формирования сигнала 2, где последовательности сигналов датчиков преобразуются в последовательности регулярных импульсных сигналов, которые могут использоваться платой сбора данных 3. При прохождении поезда колеса поезда обрезают магнитную силовую линию датчика, и формируется первый сигнал напряжения. Указанный первый сигнал напряжения, сформированный датчиком, вводится в формирующий диод, чтобы отфильтровать отрицательную часть уровня сигнала, и получается второй сигнал. Второй сигнал вводится в компаратор напряжения, который выдает третий сигнал. Третий сигнал вводится в оптрон, и после преобразования уровня формируется выходной сигнал.
Плата сбора данных 3 получает скорость V и колесную базу h поезда способом, заданным настоящим изобретением (который будет обсужден ниже более подробно) на основе времени прибытия соответствующих импульсов во входных последовательностях импульсных сигналов. Сигналы группы из трех датчиков после прохождения через датчик и блок формирования сигнала становятся последовательностями регулярных импульсных сигналов и вводятся в плату сбора данных. Как показано на фигуре 4, последовательности импульсных сигналов водятся в цифровую микросхему системы цифровой обработки сигналов (DSP) через оптрон и обрабатываются микросхемой DSP, которая вычисляет скорость и колесную базу, используя одно слово, чтобы обозначить скорость и колесную базу, соответственно полученные таким образом, и добавляет заголовок одного слова и окончание одного слова к слову, обозначающему скорость, и одно слово, обозначающее колесную базу, соответственно чтобы сформировать два пакета, сохраняемых в буфере FIFO. Промышленный компьютер считывает скорость и колесную базу из буфера FIFO через шину РСl. Расстояния, на которых установлены датчики, используемые для вычисления скорости и колесной базы, записываются промышленным компьютером в буфер чтения FIFO через шину РСl и считываются схемой DSP из буфера чтения FIFO при запуске системы. Весь логический контроль передачи данных обеспечивается с помощью логической схемы CPLD. Например, оптрон является микросхемой М601; DSP - микросхемой TMS320F2812; CPLD - микросхемой ЕМР7128; FIFO - микросхемой IDT7203; и управляющая шина PCI - печатной платой PCI9052 PLX. Вышеупомянутые компоненты представляют собой универсальные электронные модули. PCI представляет собой интерфейс, наиболее широко используемый в персональных компьютерах в настоящее время, и почти все материнские платы компьютеров имеют такие слоты. CPLD представляет собой программируемый логический контроллер, и пользователи могут конфигурировать логический модуль и модуль ввода-вывода в CPLD, чтобы обеспечить логическое управление. Модуль чтения/записи FIFO относится к интегральной схеме памяти первого ввода-вывода данных, который имеет определенную область памяти, и данные, записываемые в микросхему первыми, будут считываться первыми. Интерфейс РС1 имеет две микросхемы памяти FIFO. Микросхема, записанная DSP и считываемая промышленным компьютером, называется здесь микросхемой записи FIFO, тогда как микросхема, считываемая DSP и записываемая промышленным компьютером, называется здесь микросхемой чтения FIFO. Функция оптрона состоит в разделении электрических и оптических сигналов, а именно, оптическое соединение используется для ввода и вывода сигналов и выполняет функцию электрической изоляции. Затем поток данных, обработанный устройством сбора данных 3 и содержащий скорость V и колесную базу h, выдается на промышленный компьютер 4.
Промышленный компьютер 4, на основе скорости V и колесной базы h в полученном потоке данных, анализирует и обрабатывает информацию о колесной базе, используя способ, раскрытый в настоящем изобретении (как будет подробно описано ниже), и затем получает следующую информацию: тип вагона, сегментация поезда, месторасположение крюков, прибытие поезда, отправление поезда, номер вагона и так далее. Промышленный компьютер 4 выдает через последовательный порт 5 первый поток выходных данных, содержащий указанную информацию/данные, а также величины вышеупомянутой скорости и колесной базы, в указанную систему досмотра товарного поезда, или более точно, в систему контроллера с программируемой логикой, а именно PLC или другие процессоры, показанные на фигуре 1.
Кроме того, как можно видеть на Фигуре 1, система по настоящему изобретению дополнительно включает устройство чтения номеров вагонов 6, имеющее антенну для чтения электронных тегов. Антенна для чтения электронных тегов установлена на внутренней стороне рельса и служит для последовательного считывания беспроводным способом электронных сигналов, передаваемых электронным тегом, установленным в нижней части каждого вагона. Принятая здесь технология совместима с технологией считывания электронной информации устройством чтения кредитных карточек, перемещаемых через щель устройства чтения кредитных карточек, что не требует дальнейшего пояснения. Электронный сигнал, полученный антенной от электронного тега, передается в устройство чтения номеров вагонов 6 системы, где сигнал преобразуется в поток данных в реальном времени, подходящий для использования в промышленном компьютере 4.
После того, как поток данных в реальном времени был передан в промышленный компьютер 4, он дополнительно обрабатывается в компьютере и формируется файл, включающий информацию нумерации вагонов. Этот файл находится во втором потоке выходных данных промышленного компьютера. Второй поток выходных данных поступает через сетевой порт 7 в вышеупомянутую систему досмотра поезда или, более конкретно, передается в центр обработки данных системы, а именно в центр обработки данных, показанный на фигуре 1.
На фигуре 5 представлена схема, иллюстрирующая весь процесс автоматической идентификации информации о поезде, выполняемый промышленным компьютером. Каждый блок на фигуре 5 поясняется следующим образом.
S501: Пуск системы, когда инициализируются параметры, используемые в последующем потоке. Например, сколько колесных баз в настоящее время считывается с платы PCI, каковы конкретные значения колесных баз и так далее.
S502: Последовательное чтение данных с FIFO шести плат PCI, соответствующих шести группам датчиков, и получение данных о колесных базах и скорости поезда.
S503: Если плата, которая соответствует S1, получает данные скорости и колесной базы до платы, которая соответствует Х1, это значит, что направление движения поезда является четным, затем сегментируются данные колесных баз от платы, которой соответствует S1; в противном случае, направление движения поезда является нечетным, и сегментируются колесные базы в плате, которой соответствует Х1.
S504: В случае движения поезда в четном направлении, определение типа одного сегмента поезда после выполнения сегментирования, используя S1; и в случае движения поезда в нечетном направлении, определение типа одного сегмента поезда после выполнения сегментирования, используя Х1.
S505: В случае движения поезда в четном направлении, если число по данным колесной базы, считанных с платы, которой соответствует S1, больше 12, и один сегмент среди сегментов поезда, полученных после сегментации колесных баз в S1, является локомотивом, то можно сделать вывод о прибытии поезда и информация о прибытии поезда передается через последовательный порт. По прибытии поезда процесс переходит на следующую стадию. Если не прибывает никакого поезда, плата слота PCI продолжает считываться. То же самое относится к поезду, который движется в нечетном направлении, и обрабатывается плата, которой соответствует Х1.
S506: В случае поезда, который движется в четном направлении, тип одного сегмента поезда используется для определения типа всего поезда. Конкретно, если два сегмента за локомотивом - товарные вагоны, весь поезд определяется как товарный поезд. Если один из указанных двух сегментов - пассажирский вагон, ради безопасности весь поезд определяется как пассажирский поезд.
S507: После определения типа поезда информации о типе передаются через последовательный порт, чтобы оповестить PLC. Если поезд - товарный поезд, включаются рентгеновская система досмотра и фотографическая система. Затем данные колесной базы, обнаруженные S2, сегментируются и, когда крюк достигает точки О, определяются. В случае пассажирского поезда включается только фотографическая система, данные колесной базы, обнаруженные S3, сегментируются и, когда крюк достигает точки Р, определяются.
S508: В случае поезда, который движется в четном направлении, сегментируются данные колесной базы, считываемые платой, которой соответствует S2. В случае поезда, который движется в нечетном направлении, сегментируются данные колесной базы, считываемые платой, которой соответствует Х3.
S509: В случае поезда, который движется в четном направлении, когда крюк поезда достигает точки О, местоположение крюка определяется, используя данные колесной базы от S2. В случае поезда, который движется в нечетном направлении, когда крюк поезда достигает точки О, местоположение крюка определяется, используя данные колесной базы от Х3. Информация о местоположении крюка, определенном таким образом, передается в PLC через последовательный порт.
S510: В случае поезда, который движется в четном направлении, информация о нумерации поезда считывается от последовательного порта, соединенного с устройством чтения номеров вагонов, имеющим антенну RF1 и определяющим, какой сегмент поезда проходит точку О, когда выполняются считывание и запись указанной информации о нумерации поезда. В случае поезда, который движется в нечетном направлении, информация о нумерации поезда считывается от последовательного порта, соединенного с устройством чтения номеров вагонов, имеющим антенну RF2.
S511: В случае поезда, который движется в четном направлении, сегментируются данные колесной базы, считываемые платой, которой соответствует S3; и в случае поезда, который движется в нечетном направлении, сегментируются данные колесной базы, считываемые платой, которой соответствует Х2;
S512: В случае поезда, который движется в четном направлении, когда крюк поезда достигает точки Р, положение определяется, используя данные колесной базы от Х3. В случае поезда, который движется в нечетном направлении, когда крюк поезда достигает точки Р, положение определяется, используя данные колесной базы от Х3. Информация о крюке, определенная таким образом, передается в PLC через последовательный порт.
S513: Если все шесть плат предоставили информацию, указывающую, что поезд отъехал от датчиков, как и указанные платы, то можно сделать вывод, что поезд отправлен. После отправления поезда процесс переходит на следующую стадию. В противном случае плата слота PCI продолжает считываться.
S514: Если поезд отправлен, вагон, которому соответствует считанный номер, определяется и записывается в текстовый файл, который будет послан через FTP в центр обработки данных (DPC). Весь процесс окончен, и переинициализация выполнена.
(1) Получение данных скорости и колесной базы
Вычисление скорости и колесной базы выполняется в плате слота PCI. Каждая группа из трех датчиков соответствует одной плате слота PCI, с которой она соединена через блок формирования сигнала. Следовательно, когда прибывает поезд, три платы, которым соответствуют три группы датчиков одного направления, формируют три набора колесной базы и скорости поезда. Поскольку три группы датчиков установлены на различных позициях и скорость может быть вычислена только, когда колеса поезда проходят датчики, эти три скорости могут быть скоростями поезда в различные моменты времени. Промышленный компьютер получает величину скорости, полученную в последний раз, как скорость поезда. Значения колесной базы от S1/X1 используются для определения прибытия и типа поезда, в то время как другие значения колесной базы используются для определения местонахождения крюков поезда в соответствующих позициях.
При работе принцип системы идентификации информации о поезде согласно настоящему изобретению заключается в следующем: расстояние между двумя осями пассажирского поезда (включая не только колесную базу тележки, но также и расстояние между тележками) очевидно отличается от расстояния между двумя осями товарного поезда. Если вагон не может быть идентифицирован системой идентификации, для безопасности он будет считаться пассажирским поездом, чтобы предотвратить сканирование рентгеновскими лучами вагонов, которое может привести к радиоактивному загрязнению.
Принцип вычисления скорости и колесных баз показан на фигуре 6. Любые два из трех датчиков в каждой группе датчиков могут использоваться для того, чтобы вычислить скорость и колесные базы поезда, в то время как другой датчик является резервным с тем, чтобы при потере сигнала одним датчиком скорость и колесные базы поезда все еще могут быть точно измерены.
На фигуре 6 ось Z представляет один рельс, на котором установлены только два рабочих датчика а и b из определенной группы датчиков (которая состоит из трех датчиков) в массиве датчиков по настоящему изобретению, в то время как с1 - интервал между датчиками а и b, например, 10-1200 мм, величина которого определяется на основе фактического расстояния между двумя шпалами и минимальной колесной базой товарного вагона. Вторые и третьи оси на фигуре 6, а именно оси а и b, иллюстрируют, соответственно, временную диаграмму импульсных сигналов колеса, собранных системой по настоящему изобретению после прохождения одним вагоном (обычно один вагон имеет четыре оси), датчиков а и b. Более конкретно, четыре импульсных сигнала колеса L1, L2, L3, L4, сформированные датчиком, показаны на оси а, и четыре аналогичных импульсных сигнала колеса L1', L2', L3', L4', сформированные датчиком b, показаны на оси b.
На фигуре 6 разница во времени между первыми импульсами на оси а и b соответствует известному расстоянию (например, расстоянию с1 между двумя смежными датчиками) на рельсах, по которым прошел поезд. Если время, в течение которого колесо проходит расстояние с1, предположим, равно t1, то очевидно, что скорость поезда может быть вычислена по следующей физической формуле:
V=c1/t1
формула 1
Колесная база вычисляется, используя следующую формулу:

формула 2
в которой V1 - скорость прибытия предыдущего колеса, V2 - скорость прибытия текущего колеса, t2 - время, необходимое указанным двум колесам, чтобы пройти тот же датчик на рельсе.
(1) Сегментация поезда
В системе по настоящему изобретению термин "сегментация" означает разделение на части или сегменты ряда собранных данных колесной базы поезда, чтобы они соответствовали реальным сегментам вагона. В настоящее время большинство вагонов поезда для внутренних перевозок имеет 4, 5, 6 или 8 осей и их колесные базы удовлетворяют трем правилам, а именно: (1) колесные базы симметричны относительно центральной точки вагона, как показано на фигуре 7, локомотив имеет L1,2=L5,6, L2,3=L4,5, и вагон 1 имеет L7,8=L9,10 (где Lij - расстояние между i-м колесом и j-м колесом); (2) расстояние от первого колеса до последнего колеса вагона больше 7 метров, как показано на фигуре 7, то есть для локомотива, L1,6>7 м, и для вагона 1, L7,10>7 м; и (3): колесная база между двумя тележками больше чем колесная база у крюка, и колесная база у крюка больше чем колесная база тележки, например, как показано на фигуре, локомотив имеет L3,4>L6,7>L1,2, вагон 1 имеет L8,9>L10,11>L7,8. Кроме того, конечно, есть вагоны, имеющие колесные базы, число которых равно другим положительным целым числам, и правило, которому удовлетворяют указанные колесные базы, может быть легко получено путем анализа согласно принципу настоящего изобретения, включено в вышеупомянутые известные правила и они будут использоваться совместно.
Способ для сегментации колесных баз поезда показан на блок-схеме фигуры 8.
Инициализация системы: эта стадия осуществляется по схеме "инициализации параметра", показанной на фигуре 5. Величины Т и N установлены как 1, и i установлена как 0. Т представляет положение до того, как колесная база Т была разделена, чтобы соответствовать индивидуальным вагонам; N представляет положение, когда колесная база N используется в настоящее время для сегментации поезда; и i представляет текущее число колесных баз, которые не использовались для сегментации.
Чтение части информации колесной базы: эта стадия выполняется при "чтении данных в плате PCI FIFO", показанной на фигуре 5. Когда два колеса одного поезда проходят группу датчиков, плата сбора данных PCI, соединенная с группой датчиков, немедленно вычисляет часть информации колесной базы и сохраняет ее в FIFO платы сбора данных. В этот момент система идентификации в промышленном компьютере может читать эту часть информации колесной базы через шину PCI, и в соответствии с номером i колесных баз, которое может использоваться для увеличения сегментации на 1.
Применение правила для четырех осей: применение трех правил колесной базы к вагону с четырьмя осями приводит к следующим четырем правилам, которым должен удовлетворить вагон с четырьмя осями.
Правило 1: величина N колесной базы приблизительно равна величине N колесной базы +2, то есть абсолютная величина разницы между величиной N колесной базы и величиной N+2 колесной базы составляет меньше 100 мм.
Правило 2: сумма N, N и N+2 колесных баз больше 7000 мм.
Правило 3: величина N колесной базы больше величины N+3 колесной базы.
Правило 4: величина N+3 колесной базы больше величины N колесной базы.
Когда i≤2, а именно число колесных баз, которые не использовались для сегментации в настоящее время, меньше 3, никакой анализ правила с четырьмя осями не может быть выполнен из-за недостатка данных для анализа.
Когда i=3, а именно число колесных баз, которые не использовались для сегментации в настоящее время, равно 3, анализ может быть выполнен для таких трех колесных баз от N до N+3 по правилу 1 и правилу 2. Если правило 1 и правило 2 не будут удовлетворены, то принято считать, что текущая сегментация не удовлетворяет правилу с четырьмя осями; если правила удовлетворены, то принято считать, что текущая сегментация может удовлетворить правило относительно четырех осей при ожидании следующей оси, а именно i=4.
Когда i≥4, а именно число колесных баз, которые не использовались для сегментации в настоящее время, больше 3, выполняется проверка, удовлетворяют ли такие четыре колесные базы от N до N+3 вышеизложенным четырем правилам. Если найдено, что четыре правила удовлетворены, считается, что правило относительно четырех осей удовлетворено; в противном случае считается, что правило относительно четырех осей не удовлетворено.
Правило относительно пяти осей: аналогично правилу относительно четырех осей, применение трех правил колесной базы к пяти осям заканчивается созданием следующих пяти правил, которым должен удовлетворить вагон с пятью осями:
Правило 1: величина N колесной базы приблизительно равна величине N+3 колесной базы, то есть абсолютная величина разницы между величиной N колесной базы и величиной N+3 колесной базы меньше 100 мм.
Правило 2: величина N колесной базы приблизительно равна величине N+2 колесной базы, то есть абсолютная величина разницы между величиной N колесной базы и величиной N+2 колесной базы меньше 100 мм.
Правило 3: сумма N, N, N+2 и N+3 колесных баз больше 7000 мм.
Правило 4: величина N колесной базы больше величины N+4 колесной базы.
Правило 5: величина N+4 колесной базы больше величины N колесной базы.
Когда i≤3, никакой анализ правила с пятью осями не может быть выполнен из-за недостатка данных для анализа. Когда i=4, анализ правила 1, правила 2 и правила 3 может быть проведен. Когда i≥5, выполняется анализ правила с пятью осями, и если найдено, что пять правил удовлетворены, считается, что правило относительно пяти осей удовлетворено, в противном случае считается, что правило относительно пяти осей не удовлетворено.
Правило относительно шести осей: аналогично правилу относительно четырех осей, применение трех правил колесной базы к шести осям заканчивается следующими пятью правилами, которым должен удовлетворить вагон с шестью осями.
Правило 1: величина N колесной базы приблизительно равна величине N+4 колесной базы, то есть абсолютная величина разницы между величиной N колесной базы и величиной N+4 колесной базы меньше 100 мм.
Правило 2: величина N колесной базы приблизительно равна величине N+3 колесной базы, то есть абсолютная величина разницы между величиной N колесной базы и величиной N+3 колесной базы меньше 100 мм.
Правило 3: сумма пяти колесных баз N и N+4 больше 7000 мм.
Правило 4: величина N+2 колесной базы больше величины N+5 колесной базы.
Правило 5: величина N+5 колесной базы больше величины N колесной базы.
Если i≤3, никакой анализ правила относительно шести осей не может быть выполнен из-за недостатка данных для анализа. При i=4 анализ по правилу 2 может быть проведен. Если i=5, анализ по правилам 1, 2, 3, 4 может быть проведен. Если i≥6, анализ может быть выполнен относительно этих пяти правил, и если результат положительный, считается, что правило по шести осям удовлетворено, в противном случае считается, что правило по шести осям не удовлетворено.
Правило с восемью осями: аналогично правилу с четырьмя осями, применяя три правила колесной базы к восьми осям, мы получим следующие шесть правил, которым должен удовлетворять вагон с восемью осями:
Правило 1: величина N колесной базы приблизительно равна величине N колесной базы +6, то есть абсолютная величина разницы между величиной N колесной базы и величинам N+6 колесной базы меньше 100 мм.
Правило 2: величина N колесной базы приблизительно равна величине N+5 колесной базы, то есть абсолютная величина разницы между величиной N+1 колесной базы и величиной N+5 колесной базы меньше 100 мм.
Правило 3: величина N+2 колесной базы приблизительно равна величине N+4 колесной базы, то есть абсолютная величина разницы между величиной N+2 колесной базы и величиной N+4 колесной базы меньше 100 мм.
Правило 4: сумма семи колесных баз данных N и N+6 больше 7000 мм.
Правило 5: величина N+3 колесной базы больше величины N+7 колесной базы.
Правило 6: величина N+7th колесной базы больше величины N колесной базы.
Если i≤4, никакой анализ правила относительно восьми осей не может быть выполнен из-за недостатка данных для анализа. Если i=5, анализ по правилу 3 может быть проведен. Если i=6, анализ по правилам 2, 3 может быть проведен. Если i=7, анализ по правилам 1, 2, 3, 4 может быть проведен. Если i≥8, анализ может быть выполнен по этим шести правилам, и если результат положительный, считается, что правило относительно восьми осей удовлетворено, в противном случае считается, что правило относительно восьми осей не удовлетворено.
Если ни одно из правил не удовлетворено, а именно ни одно из правил относительно четырех-пяти-шести и восьми осей не удовлетворено, то N=N, и i=i-1. N=N, указывает, что сегментация начата с оси N в следующий раз; и i=i-1 указывает, что число колесных баз, которые не использовались для сегментации, уменьшено на единицу. Иными словами, ось N не может использоваться для сегментации операция временно отложена, причем Т не равно N в этой точке. Анализ правил по четырем, пяти, шести восьми осям будет продолжен, когда начнется следующий процесс.
Колесные базы от Т до N сегментированы как один вагон поезда. Если любой из правил по четырем, пяти, шести, восьми осям удовлетворен, то может быть определено, что текущие величины колесной базы представляют собой величины колесной базы одного вагона поезда, и число осей указанного вагона поезда может также быть определено. Оси от N до (N+ось одного вагона - 1) сегментированы как один вагон. Например, если правило по четырем осям удовлетворено, то N, N+1, N+2 и N+3 являются четырьмя величинами колесной базы одного вагона с четырьмя осями, и номер оси вагона 4.
Оси от Т до N сегментированы как один вагон. Если Т=N, а именно нет никаких значений колесной базы, которые могли бы использоваться для сегментации до выполнения этой стадии. Если T≥N, а именно имеются величины колесной базы, которые не могут использоваться для сегментации, то все прежние величины колесной базы, которые не используются для сегментации, сегментированы как один вагон, т.е. величины колесной базы от Т до N сегментированы как один вагон.
N=N+(номep оси одного вагона): поскольку все предыдущие величины колесной базы использовались для сегментации, следующая сегментация начинается от оси М+(число осей одного вагона). i=i-(число осей одного вагона), а именно число колесных баз, которые не используются для сегментации, уменьшено на число осей одного вагона; T=N, а именно предыдущие колесные базы (N+ось одного вагона - 1) все были сегментированы и больше нет величин колесной базы, которые не использовались для сегментации.
Примеры
Когда поезд, показанный на Фигуре 7 проходит группу датчиков системы по настоящему изобретению, в целом, мы имеем 14 колес для выдачи 13 величин колесной базы. Например, величины колесной базы, обнаруженные платой сбора данных, которым соответствуют датчики, составляют 1802, 1803, 8378, 1796, 1792, 4233, 1762, 7538, 1753, 2895, 1756, 7530, 1769 мм. При считывании 3-ей величины колесной базы правило, связанное с четырьмя осями, применимо к 1-ой до 3-ой величинам колесной базы, и очевидно, что эти три величины колесной базы не удовлетворяют правилу, относящемуся к четырем осям, которым должны удовлетворять предыдущие три оси. Когда считывается 6-я величина колесной базы, правило относительно шести осей применено и, как следствие, удовлетворяется, т.е. 1802≈1792, 1803≈1796, 1802+1803+8378+1796+1792 > 7000 и 8378 > 4233 > 1802. Следовательно, 1802, 1803, 8378, 1796, 1792 и 4233 могут быть сегментированы как один вагон. Затем анализ начинается с 7-ой колесной базы "1762", и очевидно эти четыре оси от 7-й до 10-й удовлетворяют правилу, относящемуся к четырем осям и таким образом могут быть сегментированы как один вагон. Остальные колесные базы затем сегментируются как последний вагон.
Когда поезд проходит, сигнал от оси может быть потерян по различным причинам, например из-за вибрации поезда. Например, как показано на фигуре 7, когда поезд, включающий три вагона, проходит группу датчиков, сигнал от пятой оси потерян, и в целом имеется 14 колес, в свою очередь создающих 12 величин колесной базы. Как пример, величины колесной базы, обнаруженные платой сбора данных, которой соответствуют датчики, составляют 1802, 1803, 8378, 3588, 4233, 1762, 7538, 1753, 2895, 1756, 7530 и 1769 мм (т.е. полностью 12 величин колесной базы, в которых первоначальные 4-ая и 5-ая величины колесной базы объединены в одну величину колесной базы). Анализ выполняется, начиная с первой колесной базы "1802", и применяя правила по четырем, пяти, шести и восьми осям, мы находим, что ни одна из них не удовлетворяет требованиям правил. Следовательно, первая величина колесной базы не используется, и анализ выполняется, начиная со второй величины колесной базы "1803", причем снова обнаруживается, что ни одно из указанных правил не удовлетворено. Затем анализ выполняется, начиная с третьей величины колесной базы и так далее. Когда анализ выполнен, начиная с 6-ой колесной базы "1762", найдено, что 6-9 величины колесной базы удовлетворяют требованиям правила по четырем осям, таким образом они могут быть сегментированы как один вагон, и предыдущие 1-5 колесные базы сегментируются как один вагон и остальные как последний вагон.
(2) Определение типа поезда
На фигуре 9 представлена блок-схема, иллюстрирующая определение типа вагона.
При определении типа четного поезда используется величина колесной базы, вычисленная платой PCI, которой соответствует группа S1 датчиков (группа Х1 для нечетного поезда).
Поскольку в Китае пассажирские вагоны не смешиваются с товарными вагонами, товарный поезд может быть определен как поезд, имеющий локомотив в голове поезда, и все вагоны после локомотива представляют собой товарные вагоны. Следовательно, определение типа всего поезда основано на определении каждого вагона. В системе используются следующие три правила, чтобы определить сегментацию поезда. Первое правило заключается в том, что колеса и оси большинства вагонов симметричны по отношению к их центральным линиям. Второе правило заключается в том, что расстояние от первого колеса до последнего колеса одного вагона больше 7000 мм. Третье правило заключается в том, что колесная база между двумя тележками больше, чем колесная база у крюка, и колесная база у крюка больше, чем колесная база тележки. Прежде всего, поезд сегментируется как индивидуальные вагоны при использовании колесных баз, полученных системой. Затем тип каждого вагона определяется на основе его колесных баз. Поскольку число осей одного вагона в Китае больше четырех, в то время как колесные базы между первыми тремя осями локомотива, пассажирского вагона и товарного вагона отличаются, очевидно, что тип одиночного вагона может быть определен на основе колесных баз между первыми тремя осями этого вагона. Если обнаружено, что два следующих вагона после одного локомотива являются товарным вагонами, весь поезд определяется как товарный поезд. Но если один из этих двух вагонов пассажирский вагон, весь поезд определяется как пассажирский поезд.
Анализируя данные колесной базы колес поезда, эксплуатируемые в настоящее время в Китае, могут быть получены следующие правила: если первая колесная база вагона менее 1500 мм, вагон является товарным вагоном; если первая колесная база и третья колесная база вагона - обе менее 2000 мм, вагон является товарным вагоном; если первая колесная база больше или равна 2000 мм, и третья колесная база вагона больше 2000 мм, это локомотив; если первая колесная база больше или равна 2000 мм, но вторая колесная база вагона меньше 8000 мм, это локомотив; если первая колесная база больше или равна 2000 мм, но вторая колесная база вагона больше или равна 8000 мм, это пассажирский вагон.
Следовательно, по вышеупомянутым правилам, система по настоящему изобретению на основе данных колесной базы поезда может правильно анализировать и определять тип поезда, т.е. локомотив, товарный поезд или пассажирский поезд.
Конечно, с дальнейшим развитием железнодорожного транспорта могут возникнуть типы поездов, которые не отвечают вышеупомянутым правилам и таким образом системе, основанной на технологии базы данных, например на базе данных, установленной в промышленном компьютере 4 заявляемой системы. Информация о колесной базе определенных типов поезда может быть введена в базу данных заранее. Тип поезда определяется поиском в базе данных, и если информация о колесной базе поезда совпадает с информацией в базе данных, поезд может определяться типом, заложенным в базе данных; в противном случае анализ проводится по указанным правилам.
После того как тип поезда определен, 2-й бит и 3-й бит во втором байте информационного пакета последовательного порта устанавливается равным соответствующим величинам. Для товарного поезда 3-й бит в третьем байте устанавливается равным 0 и передается в PLC через последовательный порт.
(3) Месторасположение крюков поезда
Система досмотра поезда должна получить изображение каждого вагона и необходимо определить точное время, когда часть крюков (а именно, часть сцепки двух вагонов) достигает центра пучка лучей (а именно, источника рентгеновских лучей О на фигуре 2). Кроме того, чтобы получить точные фотографии головки, тела и хвоста поезда, фотографическая система также должна определить, когда крюк достигает центра камеры. Группа S2 датчиков служит для указанного определения в рентгеновской системе четного направления, в то время как группа S3 датчиков служит для указанного определения в рентгеновской системе нечетного направления. Группа Х3 датчиков служит для указанного определения в четной фотографической системе четного направления, а группа Х2 датчиков служит для указанного определения в четной фотографической системе нечетного направления.
Следовательно, система досмотра поезда требует, чтобы система по настоящему изобретению обеспечивала точное время, когда центр крюков (а именно, точка Q на фигуре 10) между каждым товарным вагоном и предыдущим вагоном достигает системы Х (а именно, источника рентгеновских лучей), с тем, чтобы система досмотра поезда могла получить изображение указанного товарного вагона. Фактически, система по настоящему изобретению заранее посылает сигнал, определяющий местонахождение крюка, в систему досмотра поезда в нужный промежуток времени перед тем, как каждый центр крюка (точка Q) поезда достигнет системы X. Аналогично, система по настоящему изобретению также заранее посылает сигнал, определяющий местонахождение крюка, в систему досмотра поезда в должный промежуток времени перед тем, как каждый центр крюка (точка Q) поезда достигает центра камеры. На практике, система по настоящему изобретению принимает следующие технические решения (а именно, "данные о местоположении крюка" в настоящем изобретении), чтобы выполнить вышеупомянутые задачи.
Ниже расположение в четной системе Х объясняется на примере. Расположение (например, расположение в фотографической системе) и в других необходимых местах аналогичны. Когда данные колесной базы, полученные платой сбора данных, в которой соответствующие датчики группы S2, используемые для сегментации, находят, что i=1, а именно второе колесо вагона входит в контакт точно с этой группой датчиков. Затем по расчетной формуле (а именно, по формуле 3, приведенной ниже) можно вычислить, что после периода времени (называемым временем задержки Т), центр крюка перед текущим вагоном проходит точно через центр потока лучей рентгеновской системы досмотра. Следовательно, после указанной задержки Т информация о местоположении крюка получается немедленно, а именно добавляя 1 к числу крюков в точке О в четвертом байте информационного пакета последовательного порта. Если по колесной базе, обнаруженной S1, определяется, что текущий вагон является товарным вагоном, необходимо установить 0-й бит третьего байта в 1, что указывает на начало сканирования, и указанная информация передается в PLC через последовательный порт.
Как показано на фигуре 10, S2 представляет вторую группу датчиков четного направления, G представляет расстояние между группой S2 датчиков и центром потока лучей системы X, a L представляет первую колесную базу следующего вагона. Если D используется для представления крюка, отображающего расстояние между предыдущим и последующим вагонами (расстояние между последним колесом предыдущего вагона и первым колесом следующего вагона), величина D/2, показанная на фигуре, составляет только половину крюка, представляющего это расстояние. Q представляет центральную точку расстояния крюка. Группа S2/X3 датчиков установлена на расстоянии 3000-4500 мм от центра потока лучей системы X. Первая колесная база (колесная база тележки) каждого товарного вагона обычно меньше 1900 мм, тогда как расстояние крюка вообще не превышает 3400 мм, поэтому заданный по умолчанию центр крюка является центральной точкой расстояния крюка, называемой центром крюка. В результате, когда второе колесо следующего вагона проходит по датчикам, и поскольку G-(D/2)-L является очень небольшим, может быть найдено, что скорость V в пределах этого расстояния постоянная. Используемая ранее формула 1 вычисления скорости может также использоваться для того, чтобы вычислить, когда центр крюка достигает источника рентгеновских лучей О. Момент, в который второе колесо указанного товарного вагона достигает S2, равен Т1. Система по настоящему изобретению предписывает, чтобы сигнал, определяющий местонахождение крюка, был бы послан точно во время Т1. Иными словами, сигнал, определяющий местонахождение крюка, посланный во время Т1, должен включать информацию, которая указывает на задержку времени Т. Задержка времени Т определяет, что указанный центр крюка достигнет позиции источника рентгеновских лучей с задержкой Т после указанного времени Т1, т.е. во время Т2 (Т2=Т1+Т). Это можно видеть на фигуре 10, поскольку конкретная величина G в настоящей системе известна (например, на фигуре 2 можно вдеть, что расстояние между S2 и О-d2, и все эти данные хранятся в базе данных настоящей системы). Кроме того, следующие три физические величины, а именно скорость V, первая колесная база L второго вагона и колесная база D между последней осью первого вагона и первой осью первого вагона, уже известны в системе по настоящему изобретению. Следовательно, Т может быть вычислено, используя следующую формулу:
формула 3
(4) Определение прибытия поезда
Для определения прибытия поезда, который движется в четном направлении, используются величины колесной базы, вычисленные платой PCI, которой соответствует группа 81 датчиков (Х1 для поезда, который движется в нечетном направлении). Возьмем движущийся в четном направлении поезд в качестве примера. Когда системная программа считывает данные колесной базы с платы сбора данных FIFO слота РС1, которой соответствует группа S1 датчиков, и сегментирует эти колесные базы, определяется тип одного вагона. Если количество считанных колесных баз превышает 12 (первое условие) и определяется, что один из вагонов поезда, полученный из сегментации колесной базы согласно указанной информации - локомотив (второе условие), то считается, что поезд прибыл. Первое условие используется только для предотвращения «опрокидывания» системы, когда только локомотив проходит через систему сканирования, в то время как второе условие 2 препятствует «опрокидыванию» системы, когда поезд, подлежащий сканированию, возобновляет движение после режима ожидания на позиции сканирования.
После того, как определено, что поезд прибывает, в информационном пакете последовательного порта бит 0 второго набора байтов переходит в 1 и передается в PLC через последовательный порт.
(5) Определение отправления поезда
Поскольку минимальная скорость сканирования, требуемая для системы досмотра товарного поезда, равна 5000 м/час, минимальная скорость движения поезда, определенная системой, равна Vm=5000 м/час. Максимальная колесная база hm вагона вообще не превышает 20 метров. Из следующего простого вычисления: скорость 5000 м/час эквивалентна 1,388 м/с (5000/3600=1,388), и максимальная колесная база 20 м/1,388 м/с=14,4 секунды, можно заметить, что критический интервал времени между двумя импульсами колес, которым соответствует максимальная колесная база, составляет 14,4 секунды, а именно не достигает 15 секунд.
(6) Получение номера вагона
В системе досмотра товарного поезда необходимо коррелировать изображение единичного вагона, сканируемого системой X, вид вагона, сфотографированного фотографической системой, и номер вагона, чтобы облегчить осмотр таможней. Номера вагонов обеспечиваются системой по настоящему изобретению. Большинство товарных вагонов, которые должны быть проверены системой досмотра товарного поезда, имеют электронные теги, в которые включена информация о номере вагона.
Принцип устройства чтения номеров вагонов системы по настоящему изобретению основан на беспроводной радиочастотной технологи (R(F). Когда электронный тег приближается к области действия антенны устройства чтения номеров вагонов, устройство чтения номеров вагонов получает номера вагонов через каждый следующий промежуток времени. Следовательно, когда пройдет весь вагон, будет сформировано множество идентичных номеров вагонов. Когда проходит один вагон, устройство чтения номеров вагонов приобретет множество идентичных номеров вагонов. Когда пройдет весь поезд, будет сформировано множество различных номеров вагонов, и эти номера точно соответствуют номерам вагонов, заложенным в электронные теги. Поскольку система может использоваться на границе государства, иностранные вагоны, возможно, не будут иметь электронных тегов, или электронные теги некоторых отечественных вагонов могут быть потеряны или повреждены, необходимо коррелировать номера вагона, полученные с конкретных картриджей.
Анализом и местным тестом получают правило: когда проходит сегмент поезда, тег, которому он соответствует, появляется наиболее часто. Следовательно, при считывании номера вагона необходимо сделать запись, какой вагон в настоящее время проходит систему, и анализировать номера вагона после отбытия поезда. Например, если после прохождения всего поезда из тега считываются 16 порций информации, и тег А считывается один раз, когда проходит 15-ый вагон, 14 раз, когда проходит 16-ой вагон, и ни одного раза, когда проходит 17-ый вагон, то указанной тег - тег 16-ого вагона. После анализа номер вагона и соответствующая информация о вагоне записываются в текстовый файл и передаются в центр обработки данных (DPC) через FTP.
На фигуре 11 схематично представлена информация последовательного порта, посланная в PLC системы досмотра поезда через последовательный порт системой идентификации поезда по настоящему изобретению. Информация последовательного порта, посланная в PLC, состоит из пакета данных объемом 9 всего байтов, причем первый байт - заголовок (0хЕ7), 2-7 байты - содержание данных, 8-ой байт - полная контрольная сумма содержания данных и последний байт - конец (0xE(F). Как пример, верхняя часть Фигуры 11 схематично представляет значение соответствующих битов 2-го байта, нижняя часть Фигуры 11 представляет значение соответствующих битов 3-го байта, 4-ый байт указывает на число крюков текущего поезда, которые проходят точку О, и 5-й байт указывает на число крюков текущего поезда, которые проходят точку Р. 6 и 7 байты указывают на скорость поезда. На фигуре 11 объяснены величины соответствующих битов, где термин "зарезервировано" означает, что этот бит не функционирует и зарезервирован для будущего расширения; "определяемое" означает, что тип поезда не определен и ожидает оценки, и "неясно", означает, что этот бит не был определен.
Детекторная решетка (варианты) и способ детектирования
Томографическая сканирующая досмотровая установка и способ сканирования
Способ и устройство облучения бревен рентгеновскими лучами для фитосанитарной обработки
Способ и устройство облучения бревен электронными лучами для фитосанитарной обработки
Способ досмотра грузов с использованием спирального сканирования
Установка для досмотра грузов
Устройство детектирования
Способ досмотра грузов с использованием просвечивания излучением под разными углами
Способ и установка для обнаружения контрабанды с использованием рентгеновского излучения и фотонейтронов
Мишень, преобразующая излучение в фотонейтроны, и источник рентгеновского излучения и фотонейтронов
Способ и устройство для распознавания материалов с помощью быстрых нейтронов и непрерывного спектрального рентгеновского излучения
Детекторная решетка (варианты) и способ детектирования
Томографическая сканирующая досмотровая установка и способ сканирования
Способ и устройство облучения бревен рентгеновскими лучами для фитосанитарной обработки
Способ и устройство облучения бревен электронными лучами для фитосанитарной обработки
Способ досмотра грузов с использованием спирального сканирования
Установка для досмотра грузов
Устройство детектирования
Способ досмотра грузов с использованием просвечивания излучением под разными углами
Устройство и способ генерирования рентгеновских лучей, имеющих различные энергетические уровни, и система распознавания материала

