Результат интеллектуальной деятельности: ОРТОПЕДИЧЕСКАЯ ЧАСТЬ СТОПЫ И СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННОЙ СТОПОЙ
Вид РИД
Изобретение
Изобретение относится к ортопедической части стопы, содержащей присоединительную часть для голени, действующий в качестве голеностопного сустава вращательный шарнир, посредством которого часть стопы соединена с присоединительной частью с возможностью вращения в направлениях дорсальной и плантарной флексий, влияющее на вращательное движение вокруг вращательного шарнира амортизирующее устройство, сенсорное устройство для распознавания рабочих состояний искусственной стопы и соединенный с сенсорным устройством блок управления амортизирующим устройством. Кроме того, изобретение относится к способу управления такой ортопедической частью стопы.
Известно, что управление ортопедической частью стопы в виде искусственной стопы или протеза стопы должно отвечать многочисленным требованиям, чтобы обеспечить надежное использование стопы и как можно более естественный процесс движения при ходьбе носителя протеза. Так, например, желательно во время ходьбы при ударе пяткой обеспечить управляемую постановку части стопы на плоскость опоры и контролируемый перекат через плюсну, причем тело носителя протеза немного приподнимается. На фазе переноса естественная стопа совершает дорсальную флексию, в результате чего достигаются продольное укорачивание ноги и тем самым облегченный перенос. Далее для надежного стояния на искусственной стопе требуется высокая стабильность угла между частью стопы и присоединительной частью для голени. Однако целесообразная для этого блокировка действующего в качестве голеностопного сустава вращательного шарнира искусственной стопы должна регулироваться, чтобы обеспечить расслабленное стояние носителя протеза на наклонном основании или на обуви с каблуком большей высоты.
Например, из US 2005/0197717 А1 известно управление углом лодыжки во время цикла ходьбы посредством актуатора в виде двухвинтового электродвигателя. При этом используется часть стопы, которая за счет определенной упругости должна способствовать реализации приблизительно естественного характера ходьбы. Использование актуатора в виде постоянно приводимого в действие электродвигателя требует значительных количеств электроэнергии, которая должна подаваться к искусственному суставу. Для этого носитель протеза должен носить с собой мощный аккумулятор, который из-за необходимой высокой емкости должен быть большого объема и тяжелым.
Далее известно, что для удовлетворения частичных аспектов управления осуществляется исключительно амортизация вращательного движения части стопы относительно присоединительной части. В US 7029500 В2 для этого предусмотрен специальный вращательный шарнир в качестве голеностопного сустава искусственной стопы, причем на амортизацию влияет магнитно-реологическая жидкость, когда за счет воздействия магнитного поля жидкость переключается с низкой вязкости на высокую и тем самым амортизация переключается с небольшой на сильную. За счет этого удается блокировать и на определенное время сохранять автоматически возникающие при ходьбе дорсальную и плантарную флексии. Кроме того, достигается то, что при сидении шарнир освобождается для установления плантарной флексии, как ее выполняет естественная стопа при сидении.
Далее из US 2002/0138163 А1 известно использование для установления угла покоя при стоянии на наклонном основании или в случае разной высоты каблука обуви, надеваемой на искусственную стопу, гидравлического устройства, в котором жидкость при плантарной флексии течет из одного резервуара в другой, а при дорсальной флексии - в противоположном направлении. В соединительной линии между обоими резервуарами установлена электромагнитная катушка, которая управляет вязкостью магнитно-реологической жидкости, используемой в качестве гидравлической жидкости, благодаря чему возможно переключение амортизации с первого уровня на второй. При этом для выполнения поставленных задач управления используются датчик наклона для части голени относительно вертикали и датчик контакта с землей. Последний указывает, что искусственная стопа при постановке на землю претерпевает усилие реакции земли.
В основе изобретения лежит задача выполнения ортопедической части стопы описанного выше рода с возможностью управления так, чтобы она отвечала большему числу требований к ее свойствам, чем прежде, с помощью исключительно пассивного управления амортизацией движения вокруг голеностопного сустава.
Эта задача решается у ортопедической части стопы описанного выше рода за счет того, что сенсорное устройство содержит измеряющий угол между присоединительной частью и частью стопы датчик угла лодыжки, отнесенный к вертикали датчик абсолютного угла и датчик момента для регистрации крутящего момента на голеностопном суставе или вызывающего крутящий момент на голеностопном суставе усилия.
Оказалось, что использование только трех типов датчиков обеспечивает желаемым образом управление искусственной стопой как во время цикла ходьбы, так и во время стояния только за счет воздействия на амортизацию движения голеностопного сустава. Как более подробно поясняется ниже, лишь немногих сигналов датчиков достаточно, чтобы однозначно определить необходимые различные рабочие состояния стопы и отрегулировать ее так, чтобы она могла имитировать движение естественной, здоровой стопы во время цикла ходьбы и тем не менее во время стояния даже на наклонных основаниях или на каблуках разной высоты придавать чувство уверенной опоры. Кроме того, оказалось, что сигналов датчиков достаточно, чтобы можно было также надежно управлять повседневными, связанными с ходьбой ситуациями, такими как ходьба вверх и вниз по лестницам и пандусам и ходьба назад.
В одном предпочтительном варианте амортизирующее устройство содержит отдельные и по отдельности управляемые амортизирующие средства в направлении плантарной флексии, с одной стороны, и дорсальной флексии, с другой стороны. В соответствии с этим управление движениями в обоих направлениях происходит по отдельности. Это обеспечивает разный характер амортизации в разных направлениях вращения и, например, в зависимости от выходного сигнала датчика угла лодыжки.
Часть стопы выполнена полностью или, по меньшей мере, преимущественно жесткой. Пружинящее движение части стопы на фазе опоры реализовано за счет управления амортизацией вращательного движения части стопы относительно присоединительной части для голени. Для этого необходимо, чтобы амортизирующее устройство можно было устанавливать в несколько промежуточных состояний, преимущественно регулировать непрерывно. Регулированием амортизации управляет соответствующая программа в управляющем устройстве, так что движение части стопы относительно присоединительной части для голени происходит полностью под контролем. Этого не исключает использование упругих деталей, препятствующих резким переходам, например при ударе пяткой за счет упругой пяточной части.
Одна модификация возникает за счет того, что часть стопы в одном особенно предпочтительном варианте осуществления изобретения состоит из жесткой базовой части, соединенной через голеностопный сустав с присоединительной частью, и шарнирно соединенной с базовой частью передней части стопы. Передняя часть стопы, шарнирно сочлененная с передним концом базовой части, имитирует движение пальцев естественной стопы в суставах пальцев, причем управляемый обоими клапанами амортизирующий цилиндр сочленен, с одной стороны, с присоединительной частью для голени, а с другой стороны, - с передней частью стопы вблизи вращательного шарнира между нею и базовой частью. При этом в зависимости от углового положения передней части происходит более или менее сильно пониженная передача амортизирующего действия амортизирующего цилиндра на вращательное движение передней части относительно присоединительной части для голени. Другими словами, действующая для голеностопного сустава длина рычага базовой части изменяется за счет изгиба передней части, например при перекате на фазе опоры цикла ходьбы. Это определенное укорочение длины рычага базовой части учтено программой в управляющем устройстве.
Отдельное управление амортизирующими средствами в направлении плантарной флексии, с одной стороны, и дорсальной флексии, с другой стороны, обеспечивает установление положения нулевой точки, начиная с которого происходит управление движением в обоих направлениях. Это положение нулевой точки может быть установлено вручную посредством выключателя на голеностопном суставе. Выключатель может быть выполнен дистанционным, так что его срабатывание не обязательно должно происходить на ноге.
Такое установление нулевой точки целесообразно, например, если носитель ортопедической части стопы использует ее с другой обувью с измененной высотой каблука. Таким образом, за счет ручного установления нулевой точки без проблем возможна адаптация к новой высоте каблука. Однако в качестве альтернативы возможно также, чтобы управляющее устройство распознавало положение нулевой точки по данным датчиков и чтобы амортизирующие средства были выполнены с возможностью управления, исходя из положения нулевой точки.
В одном предпочтительном на практике варианте амортизирующее устройство представляет собой гидравлическое устройство, которое выполнено с возможностью протекания через него гидравлической жидкости и в котором преимущественно для воздействия на течение в направлении дорсальной флексии предусмотрен дорсальный клапан, а в направлении плантарной флексии - плантарный клапан. Таким образом, ортопедическая часть стопы содержит в этом варианте два одноходовых клапана, через каждый из которых гидравлическая жидкость может течь только в одном направлении, чтобы обеспечить возможность управления по отдельности движениями в обоих направлениях.
Предложенный способ управления ортопедической частью стопы, содержащей присоединительную часть для голени, действующий в качестве голеностопного сустава вращательный шарнир, посредством которого часть стопы соединена с присоединительной частью с возможностью вращения в направлениях дорсальной и плантарной флексий, влияющее на вращательное движение вокруг вращательного шарнира амортизирующее устройство, сенсорное устройство для определения рабочих состояний искусственной стопы и соединенное с сенсорным устройством устройство управления амортизирующим устройством, отличается согласно изобретению тем, что определяют значение, пропорциональное возникающему на вращательном шарнире моменту лодыжки, угол лодыжки между присоединительной частью и частью стопы и абсолютный угол части стопы относительно вертикали и что в зависимости от этих измеренных значений посредством амортизирующего устройства управляют перекатом стопы на фазе опоры при ходьбе, положением части стопы на фазе маха при ходьбе и положением и подвижностью части стопы во время стояния. Если за плантарной флексией в течение заданного интервала времени не следует дорсальная флексия, то происходит переход к стоянию.
При этом амортизация в направлениях дорсальной и плантарной флексий происходит преимущественно с помощью отдельных амортизирующих средств по отдельности. При этом преимущественно в процессе ходьбы амортизирующие средства могут перемещаться в многочисленные промежуточные положения, преимущественно непрерывно. Перемещение происходит за счет программы управляющего устройства для полного управления движением, преимущественно не вызванного упругостью материала. При этом важно, что перемещение амортизирующих средств может происходить с учетом измеренного угла лодыжки или абсолютного угла.
Предложенное управление движением стопы позволяет влиять на параметры цикла ходьбы посредством уже измеренных для его сигналов датчиков. Поэтому адаптация может происходить непосредственно, так что параметрами одного цикла ходьбы не приходится, как в случае прежнего активного управления, управлять посредством измеренных параметров предшествующего цикла ходьбы. Так, например, согласно изобретению вполне можно с учетом абсолютного угла части стопы (или с учетом сигнала датчика угла вращения также присоединительной части для голени) и измерительного сигнала датчика крутящего момента определить длину шага при постановке пятки на основание, а в зависимости от определенной длины шага - параметры амортизации для только что начатого цикла ходьбы. В зависимости от определенной длины шага можно варьировать, например, углы вращения голеностопного сустава, допустимые с определенной нулевой точки в направлении дорсальной и плантарной флексий. Ограничение вращательного движения голеностопного сустава осуществляется за счет соответствующего управления соответствующим амортизирующим средством в зависимости от измеренного угла голеностопного сустава.
Предложенная комбинация измерительных сигналов позволяет также различать между ходьбой и стоянием за счет подходящей обработки этих измерительных сигналов посредством процессора в блоке управления. Переход с ходьбы к стоянию регистрируется тогда, когда момент лодыжки, начиная с отрицательного значения, достигает значения, близкого к нулю, а абсолютный угол составляет нуль и сохраняется. При расслабленном стоянии голень или линия центра тяжести тела располагается по вертикали. Переход со стояния к ходьбе регистрируется за счет того, что момент лодыжки близок к нулю, абсолютный угол превышает отличающееся от стояния пороговое значение, а изменение абсолютного значения по времени также превышает пороговое значение. При этом измерение абсолютного угла, отображающего мах ноги вперед в начале ходьбы, уже может использоваться для косвенного определения длины шага, поскольку возникающий при махе голени вперед абсолютный угол пропорционален длине шага.
Предложенный способ обеспечивает, кроме того, подходящее управление искусственной стопой во время цикла ходьбы, о чем более подробно говорится ниже.
В частности, на фазе опоры цикла ходьбы устанавливают максимальный угол лодыжки для дорсальной флексии, при этом значение амортизации соответствующего амортизирующего средства при приближении к максимальному углу лодыжки повышают в направлении блокирования, а на фазе опоры цикла ходьбы значение амортизации амортизирующего средства для движения в направлении плантарной флексии прогрессивно повышают с возрастанием угла лодыжки в этом направлении, причем состояние «удар пяткой» определяют за счет возникновения отрицательного момента лодыжки в сочетании с движением угла лодыжки в направлении плантарной флексии.
Кроме того, для стояния устанавливают высокую прогрессию значений амортизации амортизирующих средств уже для небольших углов вблизи нулевой точки, а нулевую точку устанавливают в зависимости от наклона поверхности опоры стопы или высоты каблука обуви или тогда, когда момент лодыжки, начиная с отрицательного значения, достиг значения больше нуля.
В одном из предположительных вариантов реализации изобретения при ударе пяткой амортизирующее средство перемещают в направлении плантарной флексии вплоть до максимального значения амортизации, при этом при переходе к положительному моменту лодыжки амортизирующим средством управляют в направлении дорсальной флексии для управляемого возврата плантарной флексии и для образования упора.
Предусматривается также, что в начале фазы маха цикла ходьбы посредством возвратной пружины осуществляют возврат в направлении дорсальной флексии за счет уменьшения значения амортизации амортизирующего средства в дорсальном направлении, в результате чего при ударе пяткой в конце фазы маха происходит дорсальная флексия части (10) стопы.
Кроме того, в качестве части стопы используют присоединенную к вращательному шарниру базовую часть и соединенную с ней вращательным шарниром переднюю часть (15), а для определения угла между базовой частью (10) и передней частью (15) используют разницу между наклоном основания вперед и увеличенной высотой каблука обуви.
Описанное выполнение искусственной стопы с частью стопы, состоящей также из базовой части и шарнирно соединенной с ней передней части, обеспечивает обычно невозможное различение между высотой каблука обуви и соответственно наклонным основанием.
В то время как передняя часть в случае наклонного основания остается в натяженном возвратной пружиной распрямленном положении, обувь на высоком каблуке приводит к согнутому положению передней части относительно базовой части. Дополнительный датчик угла, определяющий угловое положение передней части относительно базовой части, мог бы поэтому обеспечить различение между «наклонным основанием» и «высотой каблука».
Если такой датчик не предусмотрен, то факт, что настройка на высоту каблука должна происходить только при надевании обуви, можно учесть за счет того, что в этот момент сигнал передается на блок управления, который регистрирует положение нулевой точки вращательного шарнира при стоянии, вызванном высотой каблука. Вследствие этого для блока управления предусмотрен коммутирующий сигнал, который преимущественно с помощью устройства дистанционного управления передается носителем протеза на блок управления.
Преимущественно в качестве амортизирующего устройства используется гидравлическое устройство, через которое течет гидравлическая жидкость, причем для обоих направлений движения предусмотрены управляемые по отдельности отдельные амортизирующие средства, образованные гидравлическими одноходовыми клапанами (плантарный и дорсальный клапаны).
Предложенное используемое сенсорное устройство позволяет в остальном регистрировать соответствующую нулевую точку, так что адаптация к новой нулевой точке может осуществляться уже во время самого цикла ходьбы.
Изобретение более подробно поясняется с помощью примера, изображенного на чертежах, на которых представляют:
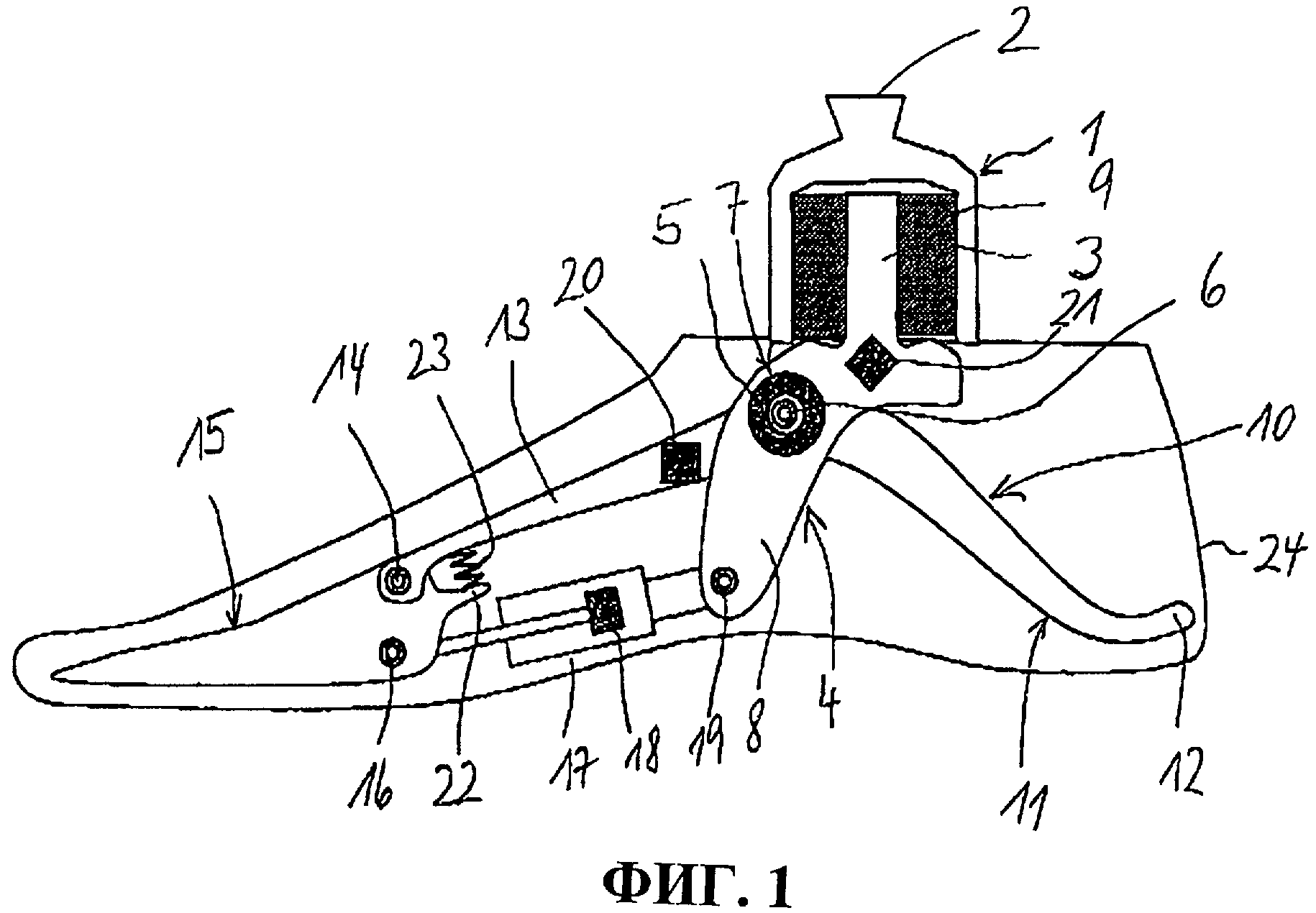
- фиг.1: схематично первый вариант выполнения протеза стопы;
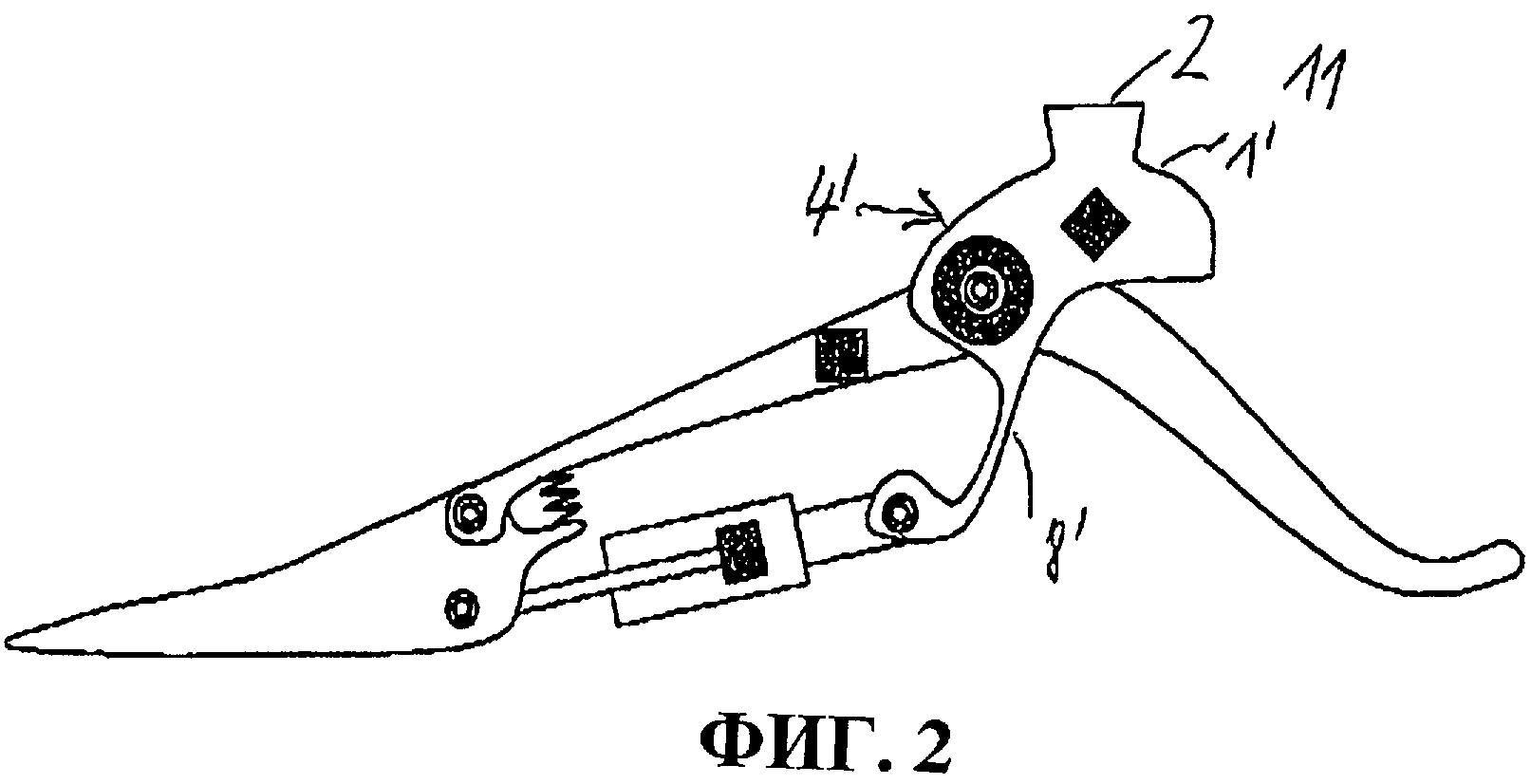
- фиг.2: схематично второй вариант выполнения протеза стопы;
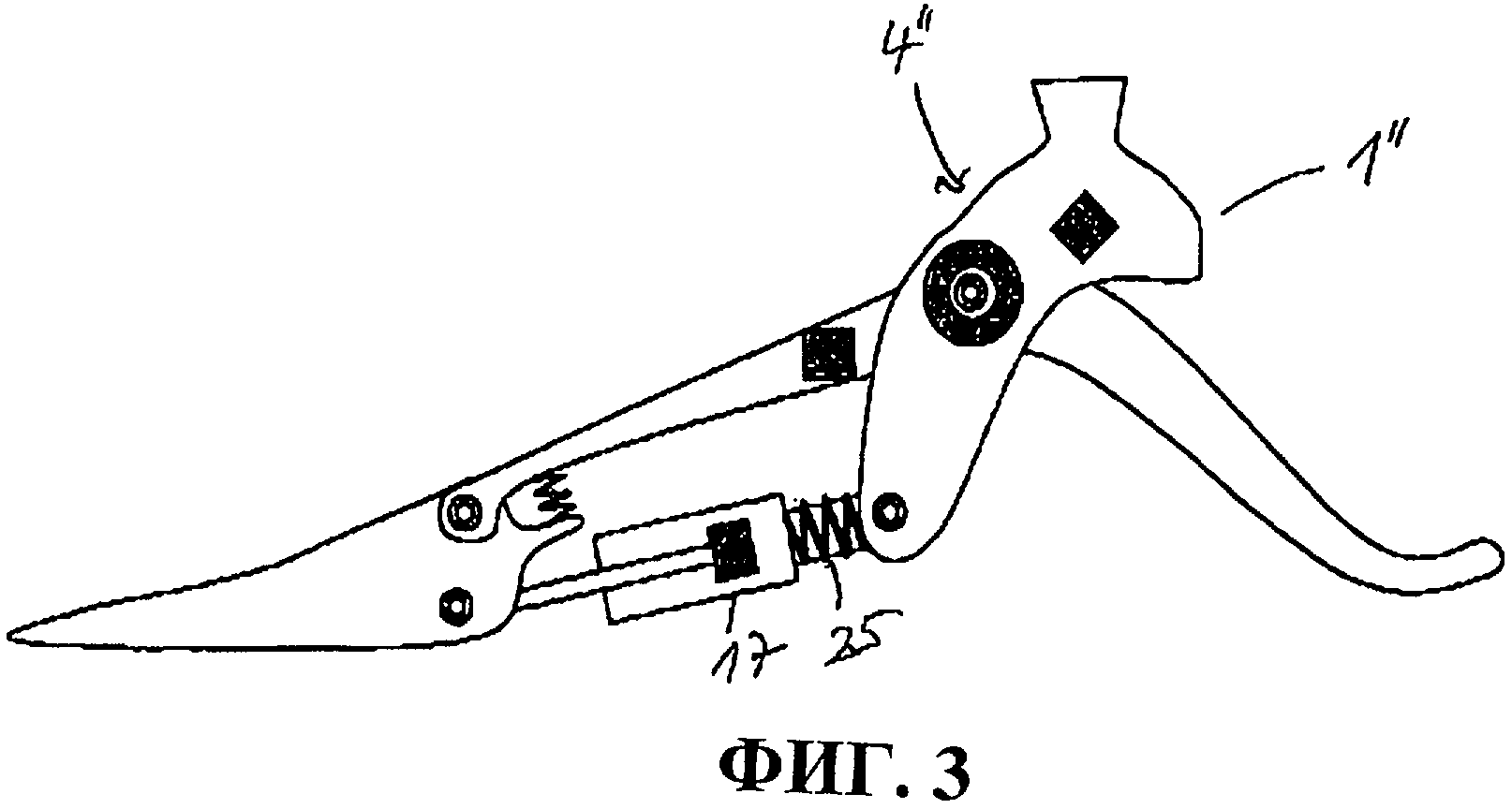
- фиг.3: схематично третий вариант выполнения протеза стопы;
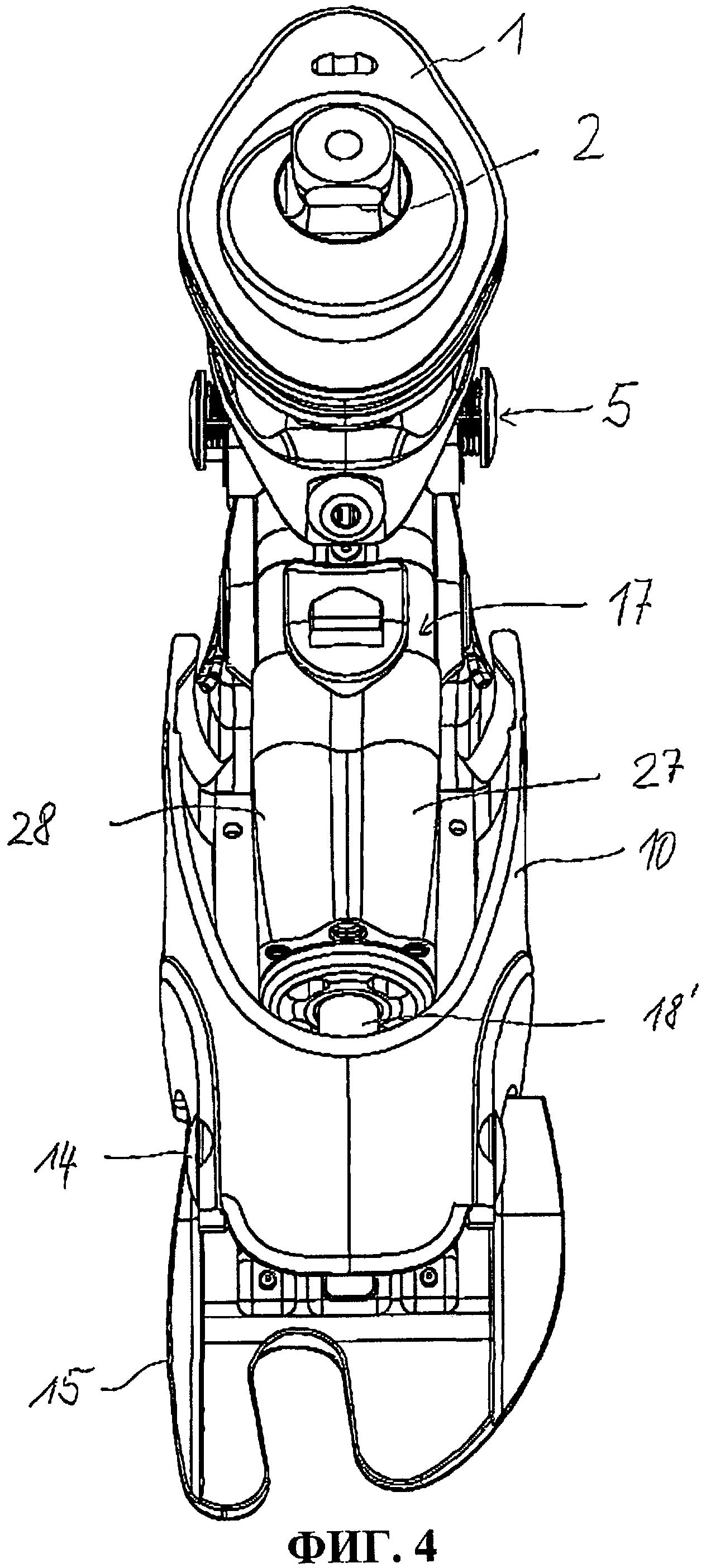
- фиг.4: вид сверху на конструктивно более подробный вариант протеза стопы;
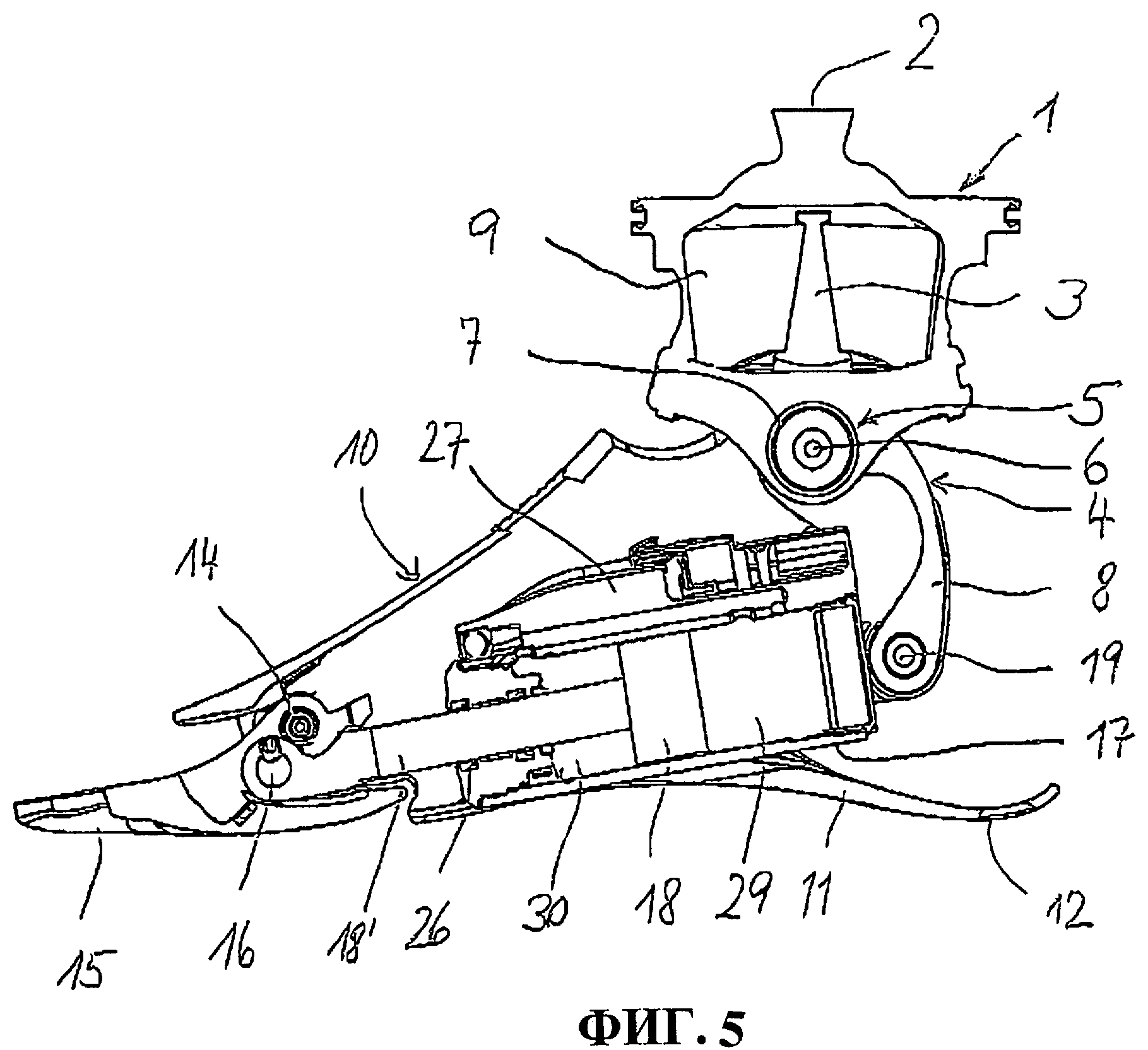
- фиг.5: сечение протеза стопы из фиг.4 параллельно сагиттальной плоскости.
В изображенном на фиг.1 варианте крепежная деталь 1 с регулировочным выступом 4 выполнена в форме перевернутой усеченной пирамиды с четырьмя наклонными поверхностями. Крепежная деталь 1 образует открытую вниз чашку, в которую входит направленное вверх ребро двуплечего рычага 4. Последний установлен с возможностью вращения вокруг вращательного шарнира 5, ось 6 вращения которого является одновременно осью голеностопного сустава искусственной стопы. Вращательный шарнир 5 снабжен датчиком 7 угла. Двуплечий рычаг 4 имеет жесткий направленный вниз выступ 8.
В открытой вниз чашке крепежной детали 1 образованный с ребром 3 промежуток заполнен относительно твердым эластичным материалом 9, так что движение крепежной детали 1 передается на ребро 3 лишь с небольшой амортизацией. Следовательно, выступ 8 повторяет движение крепежной детали 1, однако с небольшой амортизацией из-за эластичного материала 9.
Образующий голеностопный сустав вращательный шарнир 5 несет главную часть 10 стопы, которая также в виде двуплечего рычага проходит задним плечом 11 в пяточную область стопы, где проходящее наискось назад и вниз заднее плечо 11 рычага снабжено приблизительно горизонтально скругленным концом 12.
Главная часть 10 имеет плечо 13 рычага, которое проходит приблизительно прямо вперед от голеностопного сустава 5 и немного наискось вниз, так что главная часть 10 выполнена выпуклой к голеностопному суставу 5 и наклонена от него назад в пяточную область и вперед в область плюсны, причем наклон в пяточную область более крутой, чем область плюсны.
Переднее плечо 13 рычага главной части 10 заканчивается в начале области плюсны и несет там вращательный шарнир 14, которым имитирующая область пальцев передняя часть 15 сочленена с возможностью вращения с передним плечом 13 рычага главной части 10. Вращательный шарнир 14 имеет ось вращения, проходящую параллельно оси 6 вращения голеностопного сустава 5 в горизонтальном направлении. Поскольку передняя часть 15 имитирует область пальцев естественной стопы, она выполнена вперед треугольной и заканчивается острием. Под вращательным шарниром 14 на передней части 15 находится дополнительный вращательный шарнир 16, которым с передней частью 15 сочленен шток поршня 18 гидроцилиндра 17. Последний сочленен вращательным шарниром 19 с возможностью вращения со свободным концом направленного вниз выступа 8 двуплечего рычага 4, так что вращательный шарнир 19 расположен под голеностопным суставом 5 с небольшим смещением от него вперед (в направлении передней части 15).
Голеностопный сустав 5 содержит датчик 7 угла для измерения угла лодыжки, т.е. угла между ребром 3, совпадающим с голенью, и передним плечом 13 рычага главной части 10.
Переднее плечо 13 рычага главной части 10 несет далее датчик 20 наклона, который определяет наклон относительно силы земного притяжения (относительно вертикали). Такие датчики 20 угла, определяющие абсолютный угол наклона относительно земного ускорения, известны в виде сенсорных устройств ускорения с гироскопом и без него.
Двуплечий рычаг 4 содержит совпадающий с регулировочным выступом 2, т.е. с (искусственной) голенью пациента, датчик 21 момента лодыжки, который измеряет действующий в этом месте крутящий момент.
Задний конец передней части 15 снабжен опорным выступом 22, который служит для удержания нагружаемой на растяжение и сжатие пружины 23, опирающейся другим своим концом на переднее плечо 13 рычага главной части 10. Пружина 23 вызывает возврат передней части 15 после дорсальной флексии, причем скорость возврата определяется гидроцилиндром 17.
Гидроцилиндр 17 выполнен в виде пассивного актуатора, в котором клапаны (не показаны) управляют вызванным поршнем 18 течением гидравлической жидкости, причем сами клапаны выполнены не только с возможностью включения и выключения, но и с возможностью управления расходом. Однако возможно также выполнение гидроцилиндра 17 в виде активного актуатора, который без силового воздействия извне может вызвать перемещение передней части 15.
Изображенный на фиг.2 вариант в основном соответствует варианту на фиг.1. Отличие состоит в том, что крепежная деталь 1′ выполнена за одно целое с регулировочным выступом 2, вследствие чего отсутствует упругость за счет эластичного материала 9. Вместо этого направленный вниз выступ 8′ двуплечего рычага 4′ выполнен более тонким, так что несущий вращательный шарнир 19 свободный конец выступа выполнен упруго-пружинящим по отношению к остальному материалу двуплечего рычага 4′.
Разумеется, искусственная стопа во втором варианте также имеет косметическое покрытие 24, как и в первом варианте. Однако это косметическое покрытие 24 во втором и третьем вариантах не показано.
В третьем варианте искусственной стопы на фиг.3 двуплечий рычаг 4′′ выполнен также за одно целое с регулировочным выступом 2. Направленный вниз выступ 8 двуплечего рычага 4′′ выполнен жестким, как в первом варианте. Вместо этого гидроцилиндр 17 посредством спиральной пружины 25 упруго соединен с направленным вниз выступом 8 двуплечего рычага 4′′. За счет этого последовательно с действием гидроцилиндра 17 возникает упругость, которая в варианте на фиг.1 реализована эластичным материалом 9, а в варианте на фиг.2 - пружинящим выступом 8′. Все остальные части третьего варианта соответствуют частям первого варианта.
Изображенный на фиг.4 и 5 вариант позволяет видеть крепежную деталь 1 с регулировочным выступом 2 в форме пирамиды. В крепежной детали 1 находится эластичный материал 9, который взаимодействует с амортизирующим эффектом с направленным вверх ребром 3 двуплечего рычага 4. Направленный вниз выступ 8 двуплечего рычага 4 расположен в этом варианте в направлении ходьбы за голеностопным суставом 5 и сочленен там вращательным шарниром 19 с гидроцилиндром 17. В гидроцилиндре 17 с возможностью продольного перемещения установлен поршень 18, выходящий наружу через расположенную в гидроцилиндре 17 опору 26 и соединенный с дополнительным вращательным шарниром 16 передней части 15. На голеностопном суставе 5 установлена главная часть 10, которая выполнена здесь в виде жесткого корпуса и содержит направленный назад упругий рычаг 11 в качестве пяточного рычага. Таким образом, главная часть 10 вместе с пяточным рычагом 11 установлена с возможностью поворота вокруг голеностопного сустава 5 относительно крепежной детали 1 и двуплечего рычага 4. Движением поворота между крепежной деталью 1 и главной частью 10 управляют и амортизируют его двуплечий рычаг 4 и гидроцилиндр 17. Сочленение штока 18′ поршня 18 с передней частью 15 вызывает при этом только дополнительное управление образующей пальцевую пластину передней частью 15, которое, однако, лишь незначительно модифицирует управление главной частью 10, поскольку вращательный шарнир 16 расположен в непосредственной близости от вращательного шарнира 14 между передней 15 и задней 10 частями. Гидроцилиндр 17 снабжен двумя управляющими клапанами 27, 28, расположенными на его верхней стороне. Клапаны 27, 28 связаны с камерами 29, 30 гидроцилиндра 17 с обеих сторон от поршня 18, причем обратные клапаны (не показаны) заботятся о том, чтобы через клапан 27 могло происходить течение гидравлической жидкости только из задней камеры 29 в переднюю камеру 30, в результате чего поршень 18 входит в гидроцилиндр 17, что соответствует плантарной флексии главной части 10 относительно крепежной детали 1. Управляющий клапан 28 обеспечивает вместе с обратными клапанами течение гидравлической жидкости только из передней камеры 30 в заднюю камеру 29, в результате чего поршень 18 выходит из гидроцилиндра 17, т.е. происходит увеличение расстояния между вращательными шарнирами 19, 16. Это соответствует дорсальной флексии между крепежной деталью 1 и главной частью 10. В то же время перемещение вращательного шарнира 16 относительно вращательного шарнира 14 вперед вызывает подъем передней части 15.
Искусственная стопа функционирует в описанных вариантах одинаково. Сенсорное устройство для измерения угла лодыжки, момента лодыжки и абсолютного угла наклона позволяет определить и дифференцировать релевантные функциональные состояния искусственной стопы, причем обрабатывается сигнал датчика угла лодыжки для определения угла лодыжки (между крепежной деталью 1, 1′, 1′′ и главной частью 10), с одной стороны, и соответствующая скорость угла лодыжки, с другой стороны.
Так, например, распознать, находится ли искусственная стопа в процессе ходьбы на фазе шага или опоры, можно за счет определения скорости угла лодыжки при прохождении через нуль момента лодыжки. Если скорость угла лодыжки при прохождении через нуль момента лодыжки лежит ниже порогового значения, это распознается как «стояние», и актуатор в виде гидроцилиндра 17 посредством клапанов устанавливается на высокое сопротивление, за счет которого может быть образован дорсальный упор.
Распознавание крутого наклона или высоты каблука определяется посредством датчика 20 наклона в области плюсны главной части 10 при прохождении через нуль момента лодыжки.
При распознавании ходьбы в плоскости клапан, относящийся к плантарной флексии стопы, остается в полуоткрытом положении, тогда как клапан, определяющий дорсальную флексию, закрывается с увеличением угла лодыжки, образуя дорсальный упор.
При распознавании ходьбы в гору допускается увеличенная дорсальная флексия передней части 15.
При распознавании во время ходьбы удара пяткой после фазы переноса и в начале фазы опоры, в частности, за счет отрицательного момента лодыжки управление клапаном для плантарной флексии происходит так, что с увеличением угла лодыжки в направлении плантарной флексии он закрывается, образуя тем самым упор для плантарной флексии.
При распознавании отталкивания пальцами в конце фазы опоры (уменьшающийся момент лодыжки при увеличенном угле лодыжки) клапан для дорсальной флексии после паузы полностью открывается, чтобы за счет упругого момента вызвать подъем передней части (подъем пальцев) на фазе маха.
На этих примерах видно, что можно осуществить важное управление искусственной стопой при стоянии и ходьбе также в зависимости от наклона земли или высоты каблука, причем уже достаточно управления сопротивлением движению посредством гидроцилиндра. В качестве альтернативы может быть предусмотрен также активный актуатор в смысле исполнительного органа.
В одном примере для распознавания состояний движения протеза стопы и вытекающего из этого управления реализованы следующие функции.
Различение между стоянием и ходьбой
Различение между стоянием и ходьбой осуществляется по следующим критериям.
1. Распознавание фазы маха
Фаза маха распознается за счет того, что момент лодыжки близок к нулю, поскольку стопа на фазе маха не нагружена.
Абсолютный угол части 10 стопы превышает пороговое значение, которое можно индивидуально определить для стояния. Кроме того, скорость абсолютного угла превышает определенное пороговое значение.
2. Распознавание удара пяткой в состоянии маха вперед
Распознается отрицательный момент лодыжки (плантарная флексия). Сигнал абсолютного угла соответствует стопе в состоянии маха вперед по сравнению с индивидуально определенным для стояния пороговым значением.
Опционально плантарная флексия при ударе пяткой может указываться за счет скорости угла лодыжки.
3. Возврат к стоянию
После распознавания удара пяткой абсолютный угол главной части 10 остается в пределах индивидуально определенного для стояния порогового значения. В качестве альтернативы или дополнительно активное реверсирование направления движения на средней фазе опоры с дорсальной стороны в плантарную сторону может быть распознано как критерий стояния.
При обнаружении стояния управляющие клапаны 27, 28 настраиваются так, что для стояния возникают упоры в вентральную и дорсальную стороны для узкого угла (положение нулевой точки). Для цикла ходьбы упор смещается в дорсальную сторону, и амортизирующие свойства для плантарной и дорсальной флексий устанавливаются в зависимости от длины шага.
Различение между плоскостью и пандусом
Измеренный абсолютный угол в начале средней фазы опоры цикла ходьбы, т.е. после постановки всей стопы на основание, больше или меньше, чем определенный для ходьбы в плоскости диапазон значений абсолютного угла.
В соответствии с установленным наклоном пандуса дорсальный упор изменяется, и амортизирующие свойства при плантарной и дорсальной флексиях устанавливаются в зависимости от абсолютного угла и прогнозируемой длины шага.
Распознавание ходьбы назад
Распознавание ходьбы назад состоит из распознавания фазы маха назад и распознавания постановки передней части стопы в отведенном назад состоянии.
1. Распознавание фазы маха назад
При измеренном моменте лодыжки, близком к нулю, сигнал абсолютного угла соответствует отведенной назад по сравнению со стоянием стопе (ретроверсия), а скорость абсолютного угла превышает определенное пороговое значение.
2. Распознавание постановки плюсны в отведенном назад состоянии
Измеряется больший положительный момент лодыжки.
В зависимости от измеренных значений упор смещается в дорсальную сторону, а амортизирующие свойства при плантарной и дорсальной флексиях устанавливаются в зависимости от абсолютного угла при постановке плюсны.
Адаптация к каблукам разной высоты
Преимущественно высота каблука определяется за счет считывания сигнала абсолютного угла во время подачи вручную сигнала триггера. Пропорционально абсолютному углу устанавливается нулевая точка для управляющих клапанов 27, 28.
В качестве альтернативы этому можно определить высоту каблука в случае искусственной стопы с шарнирно присоединенной передней частью 15 за счет измерения угла передней части 15 относительно главной части 10. В этом заключается дополнительная опция в рамках настоящего изобретения.
Стояние на наклонном основании
Измеряется абсолютный угол при реверсировании направления движения с плантарной стороны в дорсальную сторону, если момент лодыжки проходит через нуль. В соответствии с этим дорсальный упор для управления гидроцилиндром 17 с управляющими клапанами 27, 28 смещается в зависимости от наклона основания.
Распознавание ходьбы по лестнице
Если датчик 20 абсолютного угла состоит из двух датчиков ускорения для перпендикулярных друг другу отдельных составляющих ускорения, то можно определить вертикально и горизонтально пройденные пути главной части 10. Отрезки пути определяются путем двукратного интегрирования посредством соответствующих составляющих ускорения. В этих случаях можно различать между ходьбой вверх и вниз по лестнице и соответственно настраивать упоры для амортизирующих свойств при плантарной и дорсальной флексиях.
Аналогичным образом ускорения могут использоваться для того, чтобы настроить ходьбу с разной скоростью за счет смещения упоров в дорсальную сторону и соответствующего изменения амортизирующих свойств при плантарной и дорсальной флексиях.
Ортопедическое переходное устройство
Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы
Приемная гильза протеза и система из приемной гильзы протеза и протезного устройства
Способ управления ортопедическим суставом
Ортопедическое переходное устройство
Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы
Приемная гильза протеза и система из приемной гильзы протеза и протезного устройства
Способ управления ортопедическим суставом
Способ управления пассивным протезом коленного сустава с регулируемой амортизацией
Способ управления амортизацией фазы остановки искусственного коленного сустава

