Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ПЕРЕМЕЩЕНИЙ ИЛИ ДЕФОРМАЦИЙ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к измерительной технике и имеет целью повышение качества измерения малых перемещений и упрощения конструкции устройства путем использования двухмерной светочувствительной матрицы и затвора.
Известны многочисленные способы и устройства дискретного отсчета перемещений, основанные на пересчете расположенных в ряд физических объектов: делений шкалы, электрических контактов, интерференционных линий и т.п. /Ю.В.Димов. Метрология, стандартизация, сертификация. - С-Пб.: Питер, 432 с. (с.270-277)/. Для повышения точности измерений единицу измерения, т.е. расстояние между соседними объектами, необходимо уменьшать, что связано с усложнением конструкции. Существенным недостатком подобных способов и устройств является низкое качество измерений, при этом под качеством измерений подразумевается совокупность свойств, обуславливающих получение результата с требуемыми характеристиками точности, в необходимом виде и в установленные сроки. Качество измерений характеризуется такими показателями, как точность, правильность и достоверность /Сергеев А.Г., Латышев М.В., Терегеря В.В. Метрология, стандартизация, сертификация: Учебное пособие. - М.: Логос, 2003, 536 с./.
Известны «Способ и устройство бесконтактного оптического измерения размеров объектов» /п. РФ №2262660 с приоритетом от 16.02.2004, G01B 11/02, опубликован 20.10.2005/, в котором объект размещают между источником лазерного излучения и фотоприемником, измеряют мощность лазерного излучения P, сравнивают ее с заданным уровнем P0, осуществляют оптическую развертку лазерного излучения в пучок параллельных лучей в зоне нахождения объекта и определяют размер объекта по величине тени от объекта на фотоприемнике, корректируя время экспозиции фотоприемника по величине разности (P0-P). Устройство для осуществления способа включает лазер, светоделительную пластину, короткофокусную цилиндрическую линзу, выходную цилиндрическую линзу, коллимирующую линзу, прибор с зарядовой связью (ПЗС-матрица), блок обработки информации, фотоприемное пороговое устройство. Недостатком известного способа является зависимость качества результатов от точности определения границ контура исследуемого объекта. При флуктуациях мощности лазерного излучения точность определения размера объекта снижается. Авторы решения преодолевают проблему с помощью регулировки времени заряда пикселей, которая в условиях флуктуации мощности лазерного излучения обеспечивает повышение точности измерений за счет корректировки времени экспозиции.
Указанный способ не пригоден для измерения малых перемещений, т.к. предназначен для измерения размеров неподвижных объектов.
Известны оптические устройства, основанные на применении интерференционных методов, в которых используются оптически связанные и последовательно размещенные источник когерентного оптического излучения, оптическая система, светоделитель, отражатель, закрепленный на поверхности объекта контроля и расположенный под углом к светоделителю, экран с установленным на нем фотоприемным устройством в виде прямоугольной матрицы фотоприемников /п. РФ №2373492 с приоритетом от 28.11.2007, G01B 11/00. «Оптическое устройство для измерения перемещений», опубликован 20.11.2009/. Недостатком данного способа является низкое качество результатов измерений, обусловленное тем, что вид интерференционной картины, проецируемой на экран, зависит от точности настройки взаимного расположения матрицы фотоприемников и исследуемого изменения интерференционной картины. Наличие большого числа конструктивных элементов: источника когерентного оптического излучения, оптической системы, светоделителя, отражателя и экрана также является недостатком, т.к. увеличивает габариты, повышает сложность применяемого устройства и проведения измерений.
Задачей, стоящей перед авторами предлагаемого изобретения, является разработка способа измерения малых перемещений (например, в механических испытаниях для измерения деформаций) с целью повышения качества измерения малых перемещений и упрощения конструкции устройства.
Техническим результатом изобретения является повышение качества измерения малых перемещений и упрощение конструкции устройства для его реализации.
Технический результат достигается тем, что в устройстве для измерения малых перемещений или деформаций объекта содержатся источник света, состоящую из столбцов и рядов светочувствительных ячеек прямоугольная ПЗС-матрица, соединенная с регистрирующей аппаратурой, размещенный между ними плоский затвор, частично перекрывающий световой поток от источника света на ПЗС-матрицу, при этом граница плоского затвора, делящая ПЗС-матрицу на освещенную и затемненную зоны, полностью охватывающие не менее одного столбца, расположена ассиметрично относительно направления столбцов светочувствительных ячеек ПЗС-матрицы, ПЗС-матрица связана с неподвижным основанием, а плоский затвор связан с объектом или его деформируемой частью.
Между источником света и ПЗС-матрицей может быть размещена оптическая светопреобразующая система, обеспечивающая повышение контрастности изображения границы затвора на поверхности матрицы и чувствительности устройства.
Форма границы плоского затвора может быть выполнена ассиметрично относительно направления столбцов светочувствительных ячеек ПЗС-матрицы в виде прямой линии с уклоном по отношению к столбцам ПЗС-матрицы, ломаной линии, или в виде плавной кривой для исключения возможности закономерно обусловленного одновременного появления полностью освещенных ячеек во всех столбцах светочувствительных ячеек при перемещении плоского затвора относительно ПЗС-матрицы.
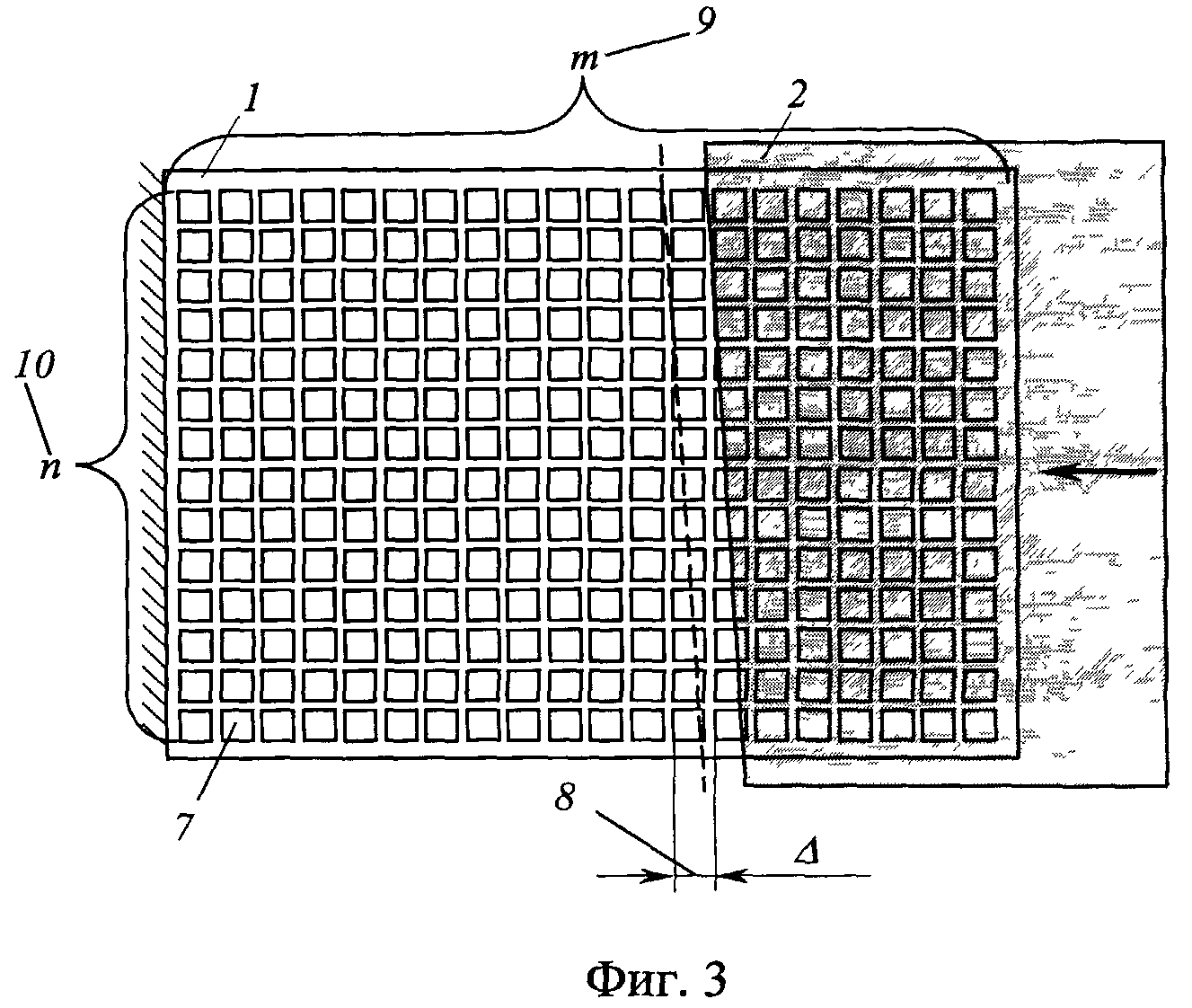
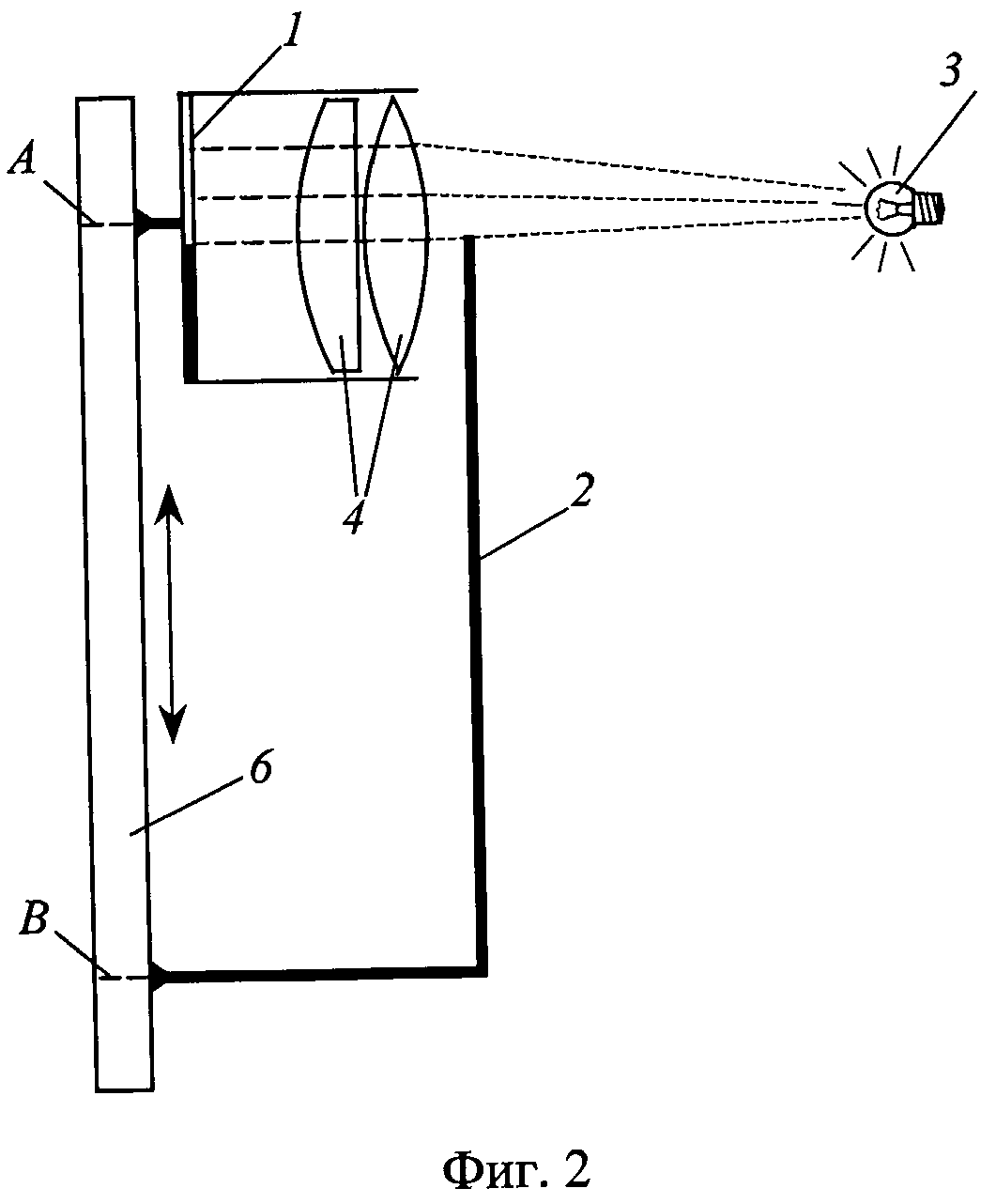
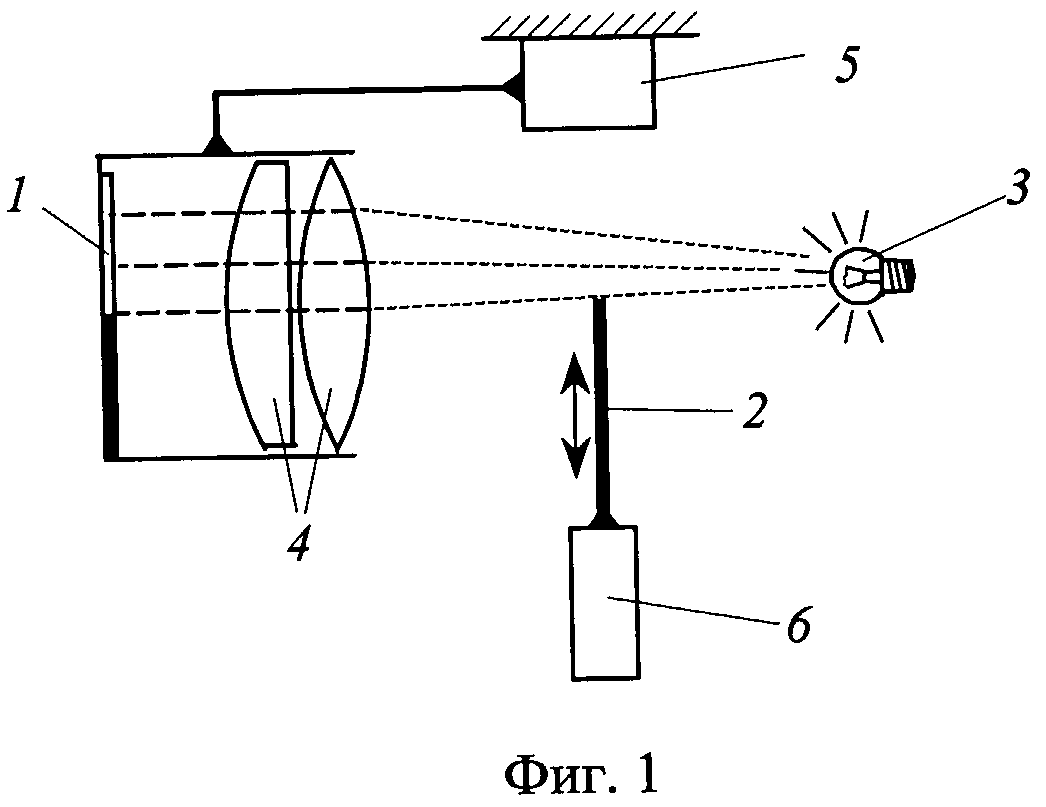
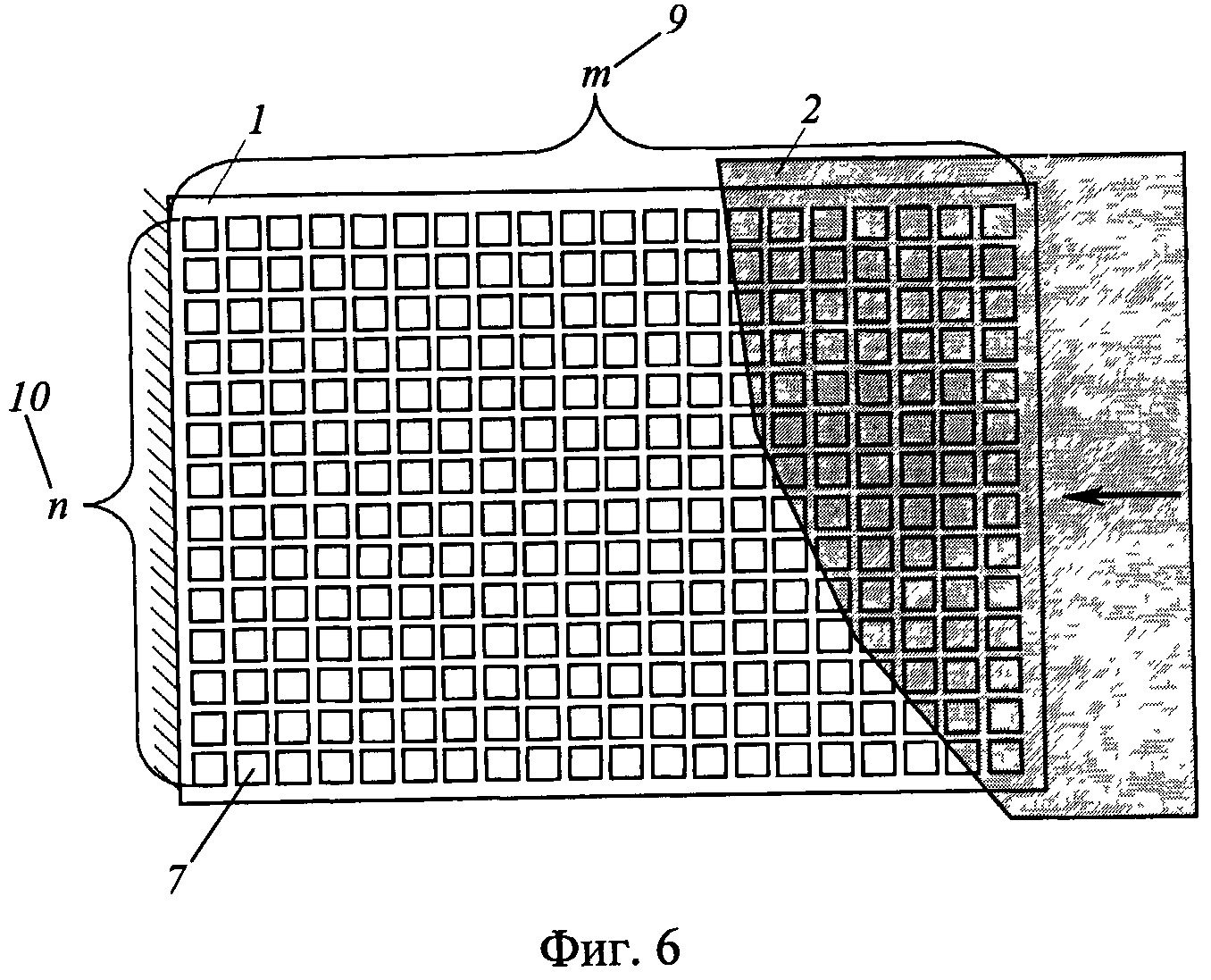
На фиг.1 показана схема устройства измерения малых перемещений объекта, при этом плоский затвор закреплен на объекте, ПЗС-матрица - на основании; на фиг.2 показана схема устройства измерения малых перемещений различных частей деформируемого объекта, при этом плоский затвор и ПЗС-матрица закреплены на соответствующих частях объекта; на фиг.3 показана схема взаимного расположения ПЗС-матрицы и плоского затвора с правильно подобранным уклоном границы плоского затвора; на фиг.4 показана схема взаимного расположения ПЗС-матрицы и плоского затвора с неправильно подобранным уклоном границы плоского затвора; на фиг.5 показана схема взаимного расположения ПЗС-матрицы и плоского затвора, где граница затвора симметрична относительно направления его перемещения, но асимметрична относительно столбцов ПЗС-матрицы за счет наклона последней; на фиг.6 показана схема взаимного расположения ПЗС-матрицы и плоского затвора с границей плоского затвора в виде ломаной линии; на фиг.7 показана схема взаимного расположения ПЗС-матрицы и плоского затвора с границей плоского затвора в виде плавной кривой, где:
1 - ПЗС-матрица;
2 - плоский затвор;
3 - источник света;
4 - оптическая система;
5 - основание;
6 - объект;
7 - светочувствительная ячейка;
8 - шаг ячеек;
9 - столбцы светочувствительных ячеек;
10 - ряды светочувствительных ячеек.
На фиг.1 показан вариант, когда ПЗС-матрица 1 закреплена на основании 5, а плоский затвор 2 закреплен на объекте 6, имеющем возможность перемещения. При перемещении объекта 6 относительно основания 5, что соответствует перемещению плоского затвора 2 относительно ПЗС-матрицы 1, изменяется однозначно связанное с величиной перемещения число освещенных светочувствительных ячеек 7, что фиксируется в виде изменения электрического сигнала регистрирующей аппаратурой (на фиг.1 не показана).
На фиг.2 показан вариант, когда ПЗС-матрица 1 закреплена на одной части деформируемого объекта 6, а плоский затвор 2 закреплен на другой части деформируемого объекта 6. При деформации объекта 6 (растяжении или сжатии) плоский затвор 2 перемещается относительно ПЗС-матрицы 1 на величину, равную изменению расстояния между элементами объекта 6 в сечениях А и В. Соответственно изменяется число освещенных светочувствительных ячеек 7, что фиксируется в виде изменения электрического сигнала регистрирующей аппаратурой (на фиг.2 не показана).
ПЗС-матрица 1 (фиг.1, 2, 3, 4, 5, 6, 7) состоит из светочувствительных ячеек 7 (фиг.3, 4, 5, 6, 7), образующих параллельные друг другу ряды светочувствительных ячеек 10 и перпендикулярные им столбцы светочувствительных ячеек 9. В том случае, когда число столбцов светочувствительных ячеек 9 равно m, а число рядов светочувствительных ячеек 10 равно n (фиг.3, 4, 5, 6), ПЗС-матрица 1 имеет вид прямоугольника с размерами (m×Δ)×(n×Δ), где - Δ (фиг.2, 3) шаг 8 светочувствительных ячеек 7, взятый для упрощения одинаковым в направлениях столбцов светочувствительных ячеек 9 и рядов светочувствительных ячеек 10 ПЗС-матрицы 1.
В том случае, если граница плоского затвора 2 расположена перпендикулярно (на фиг.3, 4 не показано) рядам светочувствительных ячеек 10 ПЗС-матрицы 1, измерение перемещения производится с дискретностью Δ шага 8 светочувствительных ячеек 7 (фиг.3, 4), что лимитирует точность измерения перемещений величиной этого шага.
Для уменьшения погрешности измерения предлагается использовать уклон (как вариант) на плоском затворе 2 (фиг.3). В этом случае, как видно из фиг.3, при перемещении плоского затвора 2 относительно направления рядов светочувствительных ячеек 10 ПЗС-матрицы 1 каждый ряд содержит полностью затемненные светочувствительные ячейки 7, полностью освещенные светочувствительные ячейки 7, а также светочувствительные ячейки 7, освещенные частично. Если за единицу отсчета взять светочувствительные ячейки 7 с определенным уровнем поступающего с них сигнала (например, полностью освещенные) и обозначить число таких светочувствительных ячеек 7 в каждом ряду светочувствительных ячеек 10 - mi то, при общем числе рядов светочувствительных ячеек 10 - n, в каждом положении плоского затвора 2 возникает некое среднее число таких светочувствительных ячеек 7, приходящихся на один ряд ПЗС-матрицы 1
В общем случае mср будет иметь дробное значение. При перемещении плоского затвора 2 на величину шага ячеек 8 - Δ светочувствительных ячеек 7 (фиг.3, 4), число полностью освещенных светочувствительных ячеек 7 изменится на 1 в каждом ряду. Однако, как следует из фиг.3, новые освещенные светочувствительные ячейки 7 при этом появятся поочередно, в определенной последовательности. В частном случае, при величине уклона 1:n, что показано из фиг.3, появление (или исчезновение) полностью освещенных светочувствительных ячеек 7 в соседних столбцах светочувствительных ячеек 9 ПЗС-матрицы 1 при монотонном перемещении плоского затвора 2 будет происходить с дискретностью Δ/n, т.е. дискретность измерения будет в n раз меньше шага ячеек 8 - Δ. Эта же задача может быть решена при использовании границы плоского затвора 2, симметричной относительно направления его перемещения, но с асимметричностью расположения границы плоского затвора 2 относительно столбцов светочувствительных ячеек 9 ПЗС-матрицы 1 за счет ее наклона относительно плоского затвора 2, что показано на фиг.5.
Задача осложняется тем, что в современных ПЗС-матрицах число столбцов светочувствительных ячеек 9 составляет до нескольких тысяч, что делает рассмотренные требования к точности величины уклона плоского затвора 2 практически недостижимыми. Вследствие погрешностей изготовления и сборки уклон возникает даже в тех случаях, если конструкцией не предусмотрен, и в конкретных исполнениях устройства появление (или исчезновение) полностью освещенных светочувствительных ячеек 7 в соседних столбцах светочувствительных ячеек 9 ПЗС-матрицы 1 при монотонном перемещении плоского затвора 2 может случайно привести к одновременному появлению нескольких полностью освещенных светочувствительных ячеек 7 в соседних столбцах светочувствительных ячеек 9 (см. фиг.4). Например, в показанном на фиг.4 случае уклон имеет значение, кратное 1:3. В результате, полностью от света к тени синхронно переходят светочувствительные ячейки 7 в каждом третьем ряду светочувствительных ячеек 10, соответственно дискретность измерения будет составлять Δ/3, что значительно выше минимально возможного значения Δ/n.
Решением данной проблемы является применение в конструкции устройства возможности регулировки уклона плоского затвора 2 (на фиг.3 не показано) относительно столбцов светочувствительных ячеек 9 ПЗС-матрицы 1 (фиг.3), что обеспечивает коррекцию уклона плоского затвора 2 при отладке устройства, либо применение границы плоского затвора 2, отличающейся от прямой линии с постоянным уклоном: например, в виде ломаной линии или плавной кривой (фиг.6, 7), что, если и не исключает закономерность одновременного появления полностью освещенных светочувствительных ячеек 7 в отдельных соседних столбцах светочувствительных ячеек 9 при перемещении плоского затвора 2 относительно ПЗС-матрицы 1, но полностью исключает такую возможность одновременно в пределах всей ширины ПЗС-матрицы 1.
Способ и устройство позволяют определять как величину циклических перемещений, так и фиксировать зависимость величины перемещения от времени, в последнем случае минимальное время процесса ограничено типом и характеристиками ПЗС-матрицы.
Цилиндрическое устройство для сжатия газов до мегабарных давлений
Противопульная гетерогенная стальная броня
Электровзрывное устройство
Способ изготовления теплообменной трубы с внутренним оребрением
Способ изготовления электромеханических инициаторов
Пневматическая установка для испытаний
Устройство для определения температурного расширения материала образца
Ультразвуковой способ контроля плотности в процессе эксплуатации деталей из высоконаполненных композитных материалов на основе октогена
Электровоспламенитель
Способ изготовления кварцевых кристаллических элементов z-среза
Цилиндрическое устройство для сжатия газов до мегабарных давлений
Противопульная гетерогенная стальная броня
Электровзрывное устройство
Способ изготовления теплообменной трубы с внутренним оребрением
Способ изготовления электромеханических инициаторов
Пневматическая установка для испытаний
Устройство для определения температурного расширения материала образца
Ультразвуковой способ контроля плотности в процессе эксплуатации деталей из высоконаполненных композитных материалов на основе октогена
Электровоспламенитель
Способ изготовления кварцевых кристаллических элементов z-среза

