Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ОЧИСТКИ ВОДЫ С НЕПРЕРЫВНЫМ КОНТРОЛЕМ ЕЕ КАЧЕСТВА В РАЗЛИЧНЫХ ТОЧКАХ ТЕХНОЛОГИЧЕСКОЙ СХЕМЫ
Вид РИД
Изобретение
Изобретение относится к области автоматизации систем водоочистки и может быть использовано при разработке установок для очистки промышленных сточных вод, хозяйственно-бытовых сточных вод, дренажных вод с орошаемых земель, организованных и неорганизованных стоков с территорий населенных пунктов и промышленных площадок, сельскохозяйственных полей и крупных животноводческих комплексов, а также для водоподготовки и организации питьевого водоснабжения.
На протяжении последнего десятилетия резко возросло количество патентов, в которых предлагаются в зависимости от назначения очищаемой воды различные способы и автоматические устройства для водоочистки. Например, станция очистки оборотной воды для плавательных бассейнов, включающая озонатор для обеззараживания воды (RU 2180324, C02F 9/04, 10.03.2002), портативный очиститель воды фильтрацией через адсорбент с последующей обработкой УФ-светом (US 7632397, C02F 1/32, 15.12.2009), способ и устройство для очистки воды путем комбинированной обработки ультразвуком и озоном (US 7384563, C02F 1/20, C02F 1/36, C02F 1/78, 10.06.2008), автоматический комплекс очистки нефтесодержащих сточных вод (RU 2235069, C02F 9/08, 27.08.2004), установка очистки природной воды для приготовления питьевой и пищевой воды высокого качества, включающая холодильник с теплообменником для удаления тяжелых изотопных модификаций воды путем их кристаллизации (RU 2332355, C02F 1/22, C02F 9/04, C02F 1/78, 20.09.2007), и др.
Недостатком известных устройств является отсутствие контроля качества воды в процессе очистки и невозможность автоматического регулирования качества очищаемой воды по содержанию в ней вредных веществ.
Наиболее близкой к предлагаемой системе автоматического управления технологическим процессом очистки воды является система автоматического управления технологическим процессом очистки воды на скорых фильтрах (RU 2322283, кл. B01D 24/48, B01D 37/04, 20.04.2008 - прототип). Система-прототип содержит фильтр с зернистой загрузкой, работающий в режиме периодической промывки (модуль очистки), датчик уровня воды в фильтре, датчик потери напора, измеряющий разность давлений воды до и после фильтра; датчики расхода и давления воды на линии промывной воды и датчик расхода фильтрата на линии фильтрата. Все датчики соединены с контроллерным шкафом управления (электронным блоком управления), принимающим от них сигналы. Контроллерный шкаф в свою очередь управляет работой промывного насоса (через преобразователь частоты в питающей сети его электродвигателя), затвора (клапана), установленного на линии фильтрата, и пяти задвижек (клапанов) на пяти линиях: линии подачи исходной воды на фильтрование, линии фильтрата, линии промывной воды и линиях канализации и повторного использования воды. Контроллерный шкаф (электронный блок управления) соединен с компьютером, отображающим информацию о процессе очистки воды. При достижении предельно допустимого значения потери напора воды в фильтре (что указывает на загрязнение загрузки фильтра) датчик потери напора посылает об этом сигнал на контроллерный шкаф. После получения такого сигнала контроллерный шкаф перекрывает поступление исходной воды на фильтр, открывает задвижку на линии промывной воды и включает преобразователь частоты промывного насоса до окончания промывки загрузки фильтра.
Главным достоинством системы-прототипа является возможность автоматического переключения фильтра из режима фильтрования в режим промывки и обратно, что позволяет повысить качество управления технологическим процессом очистки воды.
Недостатками системы-прототипа являются отсутствие контроля качества воды в различных точках технологической схемы и, соответственно, невозможность управления режимами работы установки на основе данных о содержании загрязняющих веществ в очищаемой воде.
Задачей изобретения является разработка системы автоматического оперативного управления технологическим процессом очистки воды от загрязняющих веществ, которая позволит непрерывно проводить анализ качества воды по содержанию в ней загрязняющих веществ в различных точках технологической схемы и использовать эти данные для оптимизации процесса водоочистки.
Решение поставленной задачи достигается предлагаемой системой автоматического управления технологическим процессом очистки воды, включающей модули водоочистки, датчики, регистрирующие параметры процесса в различных точках технологической схемы, клапаны-задвижки, переключающие потоки воды в заданных направлениях, соединенный с компьютером электронный блок управления, принимающий сигналы от датчиков и посылающий сигналы на клапаны-задвижки, которая, согласно изобретению, содержит несколько сменных модулей водоочистки разной глубины очистки для возможности осуществления многоступенчатой водоочистки, на выходе из которых установлены датчики, непрерывно регистрирующие качество воды по концентрации загрязняющих веществ, на входе в систему установлен датчик, непрерывно регистрирующий качество поступающей в систему исходной воды, а на всех линиях потоков воды в системе установлены клапаны-задвижки, управляемые электронным блоком управления и направляющие потоки очищаемой воды в один или несколько модулей водоочистки в зависимости от сигналов датчиков контроля качества воды.
В компьютерную программу управления клапанами-задвижками введены пороговые значения концентраций загрязняющих веществ на различных ступенях водоочистки, что позволяет направлять потоки очищаемой воды через модули водоочистки разной глубины очистки в любых сочетаниях и в любой последовательности как при возрастании загрязненности поступающей в систему исходной воды и превышении пороговых значений, так и при уменьшении загрязненности поступающей в систему исходной воды.
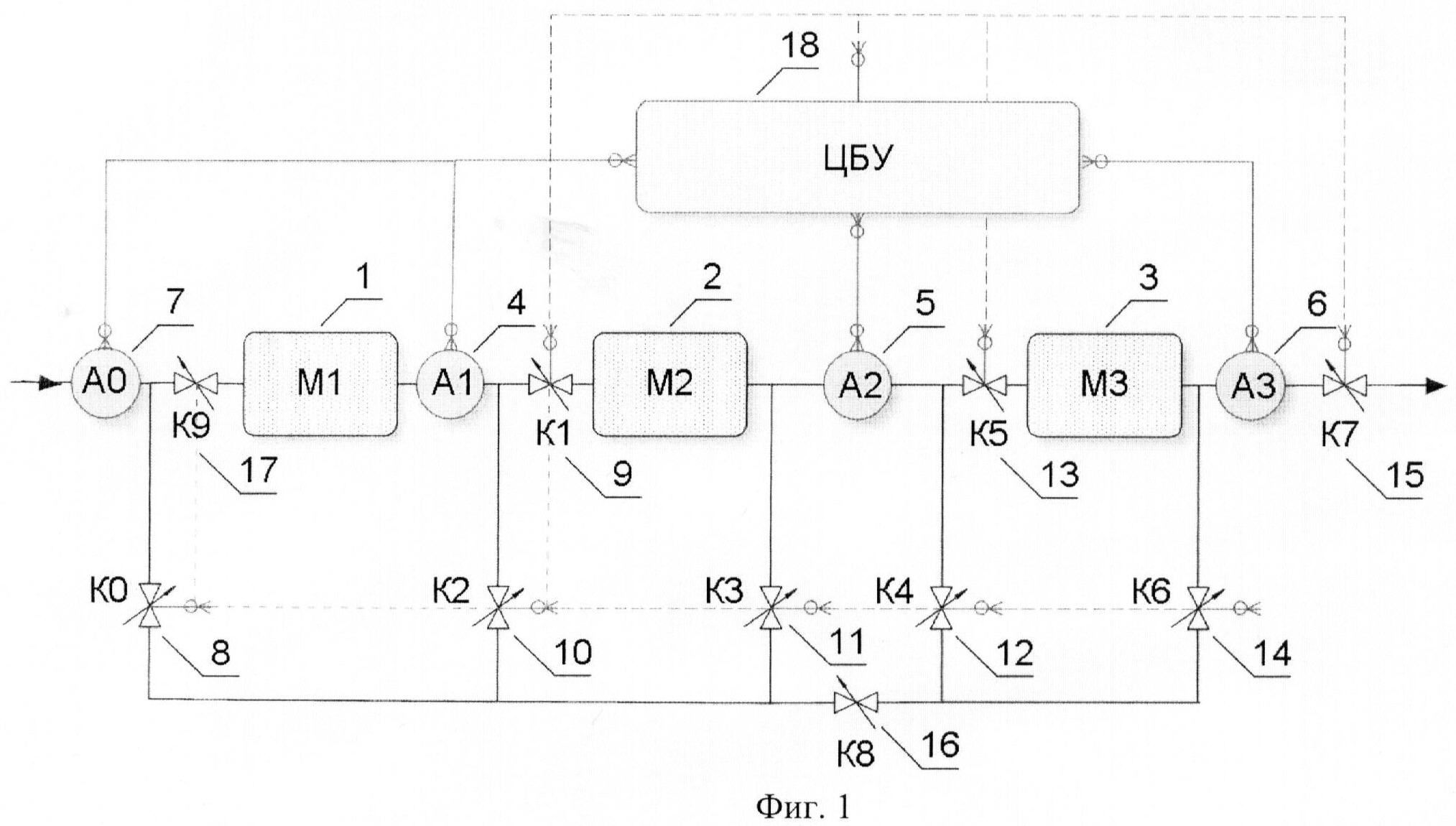
Блок-схема предлагаемой системы автоматического управления технологическим процессом очистки воды на примере трехступенчатой водоочистки приведена на фиг.1. Система автоматического управления содержит три сменных модуля разной глубины водоочистки: модуль грубой очистки M1 (1), средней - М2 (2) и тонкой водоочистки - М3 (3). На выходе каждого модуля установлены датчики А1 (4), А2 (5), A3 (6), непрерывно регистрирующие качество воды по концентрации загрязняющих веществ. На входе в систему установлен датчик А0 (7). непрерывно регистрирующий качество поступающей в систему исходной воды. Движение воды по системе регулируется клапанами-задвижками К0 (8), К1 (9), К2 (10), К3 (11), К4 (12), К5 (13), К6 (14), К7 (15), К8 (16), К9 (17), управляемыми соединенным с компьютером электронным блоком управления ЦБУ (18).
В качестве датчиков А0, A1, А2, A3 можно использовать быстродействующие высокочувствительные фотоэлектрические анализаторы качества воды, работающие в широком диапазоне длин волн. Спектральные характеристики датчиков-анализаторов А0, A1, А2, A3 выбираются в зависимости от качества исходной воды и требуемой глубины очистки. Чувствительность анализаторов достаточна для регистрации загрязнений до уровня 0,5 ПДК.
В компьютерную программу ЦБУ для управления клапанами-задвижками К0, К1, К2, К3, К4, К5, К6, К7, К8, К9 введены пороговые значения концентраций загрязняющих веществ (контаминантов) на различных ступенях водоочистки: k0 cont, соответствующее максимально допустимому загрязнению исходной воды, поступающей в систему очистки, и k1 cont, k2 cont, k3 cont, соответствующие максимально допустимому загрязнению воды после процедуры ее очистки в модулях M1, М2, М3, соответственно; k0 cont>k1 cont>k2 cont>k3 cont. При превышении показаний датчика А0 пороговой величины k0 cont включается сигнал тревоги, и поступление исходной воды в систему автоматически отключается. В зависимости от сигналов датчиков контроля качества воды А0, A1, А2, A3 - превышают их показания пороговые значения концентраций контаминантов k1 cont, k2 cont, k3 cont, или вода является более чистой, предлагаемая система автоматического управления технологическим процессом очистки воды будет работать в различных режимах, в которых функционирует разное число очистных модулей в различных сочетаниях.
Предлагаемая система автоматического управления технологическим процессом очистки воды на примере трехступенчатой водоочистки работает следующим образом.
А. Последовательность режимов работы при возрастании загрязненности поступающей в систему исходной воды.
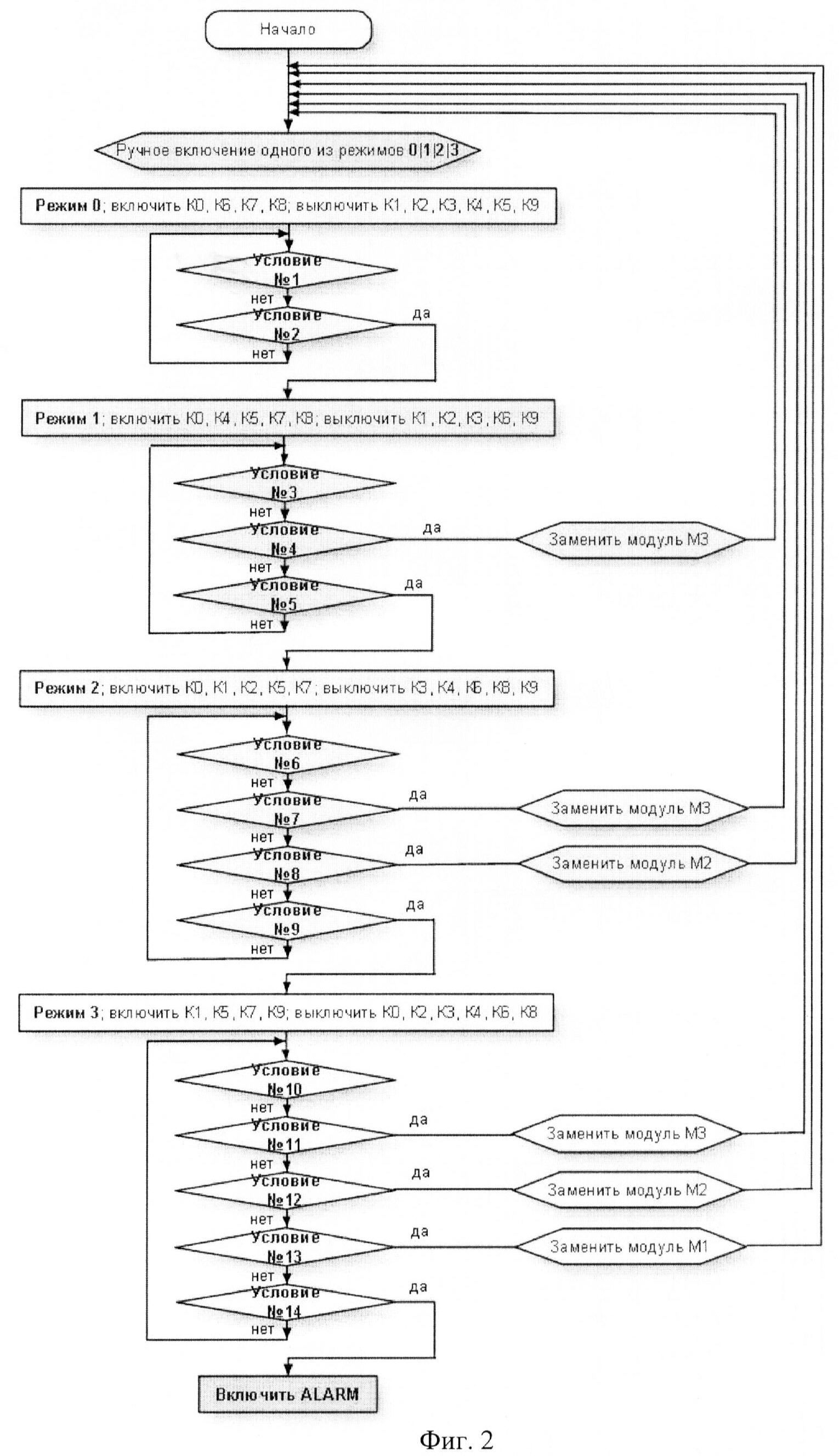
Алгоритм работы системы в указанных режимах представлен на фиг.2, параметры алгоритма приведены в таблице 1. На фиг.2 номера условий соответствуют номерам условий во втором столбце таблицы 1, базирующихся на показаниях датчиков-анализаторов А0, A1, А2, A3, приведенных в столбцах 3-6 таблицы 1.
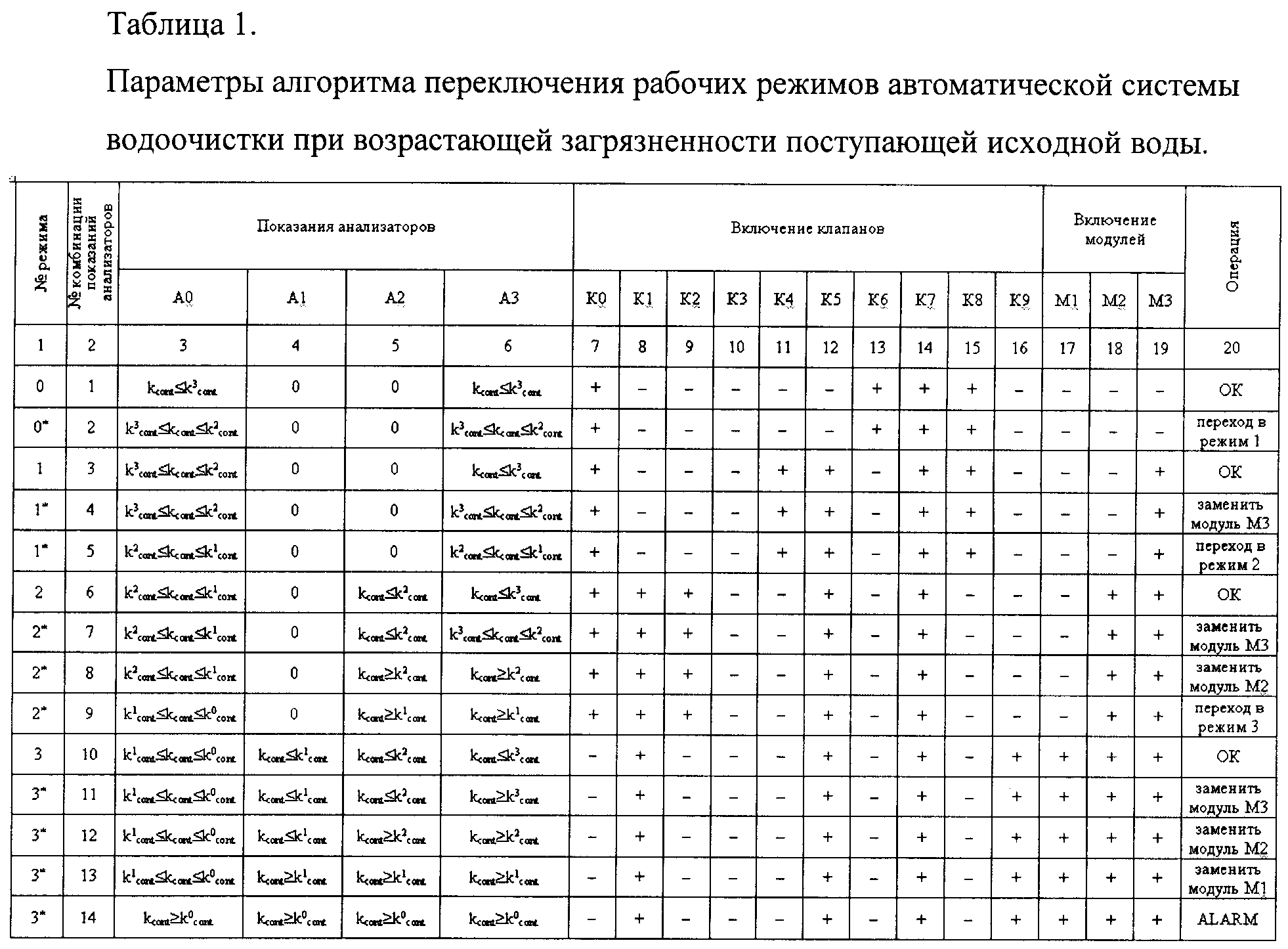
* Примечания:
1. Показания, равные 0, для А1 и А2 в столбцах 4 и 5 означают, что датчики-анализаторы А1 и А2 отключены, так как отключены модули очистки M1 и М2.
2. К0, …К9 (+/-) - клапан включен/выключен.
3. M1, М2, М3 (+/-) - модуль очистки подключен/отключен.
4. OK - продолжается работа в этом режиме.
5. ALARM - сигнал тревоги; работа системы прекращается, все клапаны К0, …К9 ставятся в положение «выключено».
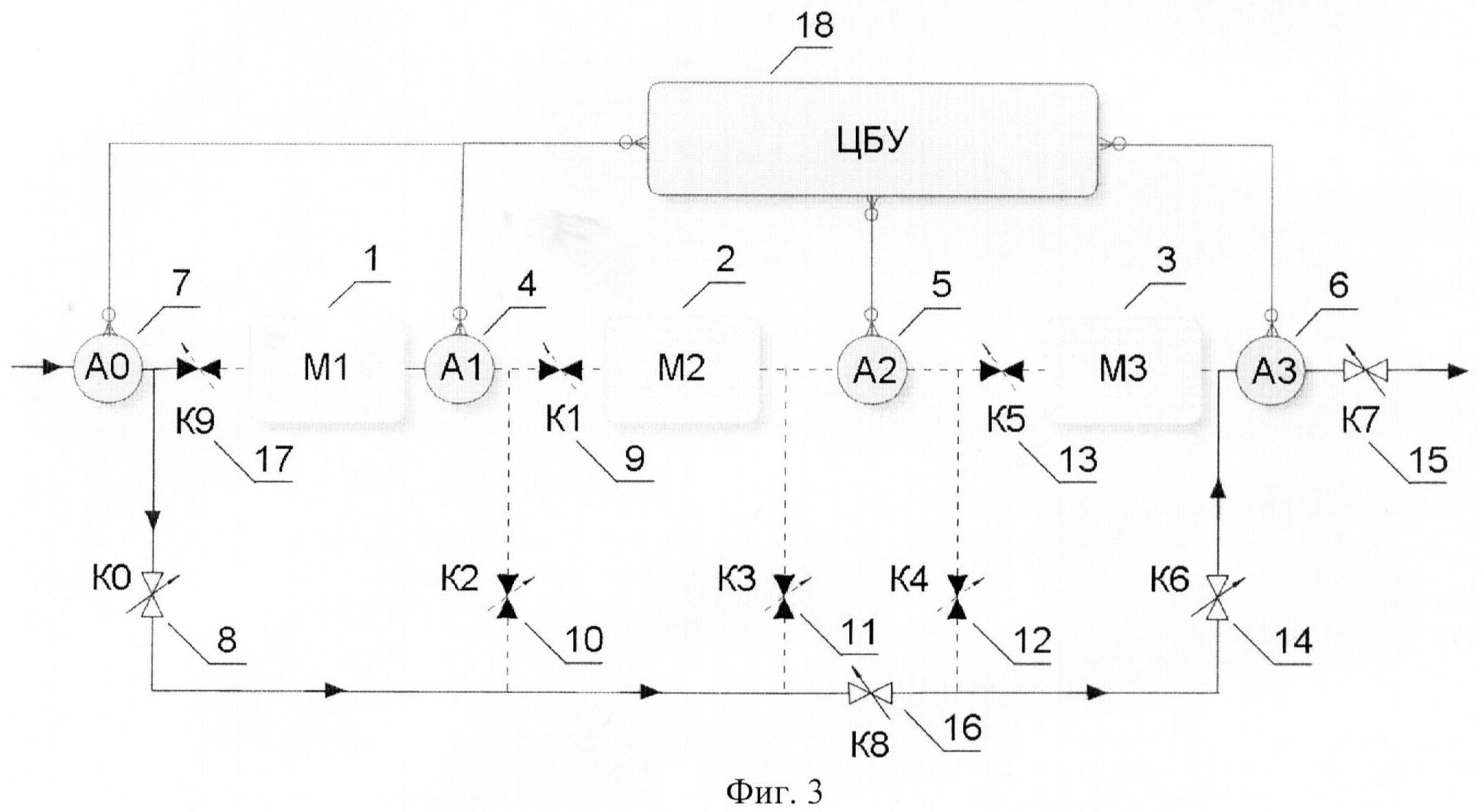
Режим 0 - так обозначен режим работы системы при полностью отключенных модулях очистки, так как качество исходной воды достаточно высокое, что подтверждается показаниями датчика А0 (7): kcont≤k3 cont - то есть содержание загрязняющих веществ в поступающей в систему исходной воде меньше (или равно) минимального порогового значения k3 cont. На фиг.3 показано состояние системы в нулевом режиме работы: включены клапаны К0 (8), К6 (14), К7 (15), К8 (16), клапаны К1 (9), К2 (10), К3 (11), К4 (12), К5 (13), К9 (17) выключены. На данной и последующих фигурах включенные клапаны показаны белым цветом, а выключенные - черным.
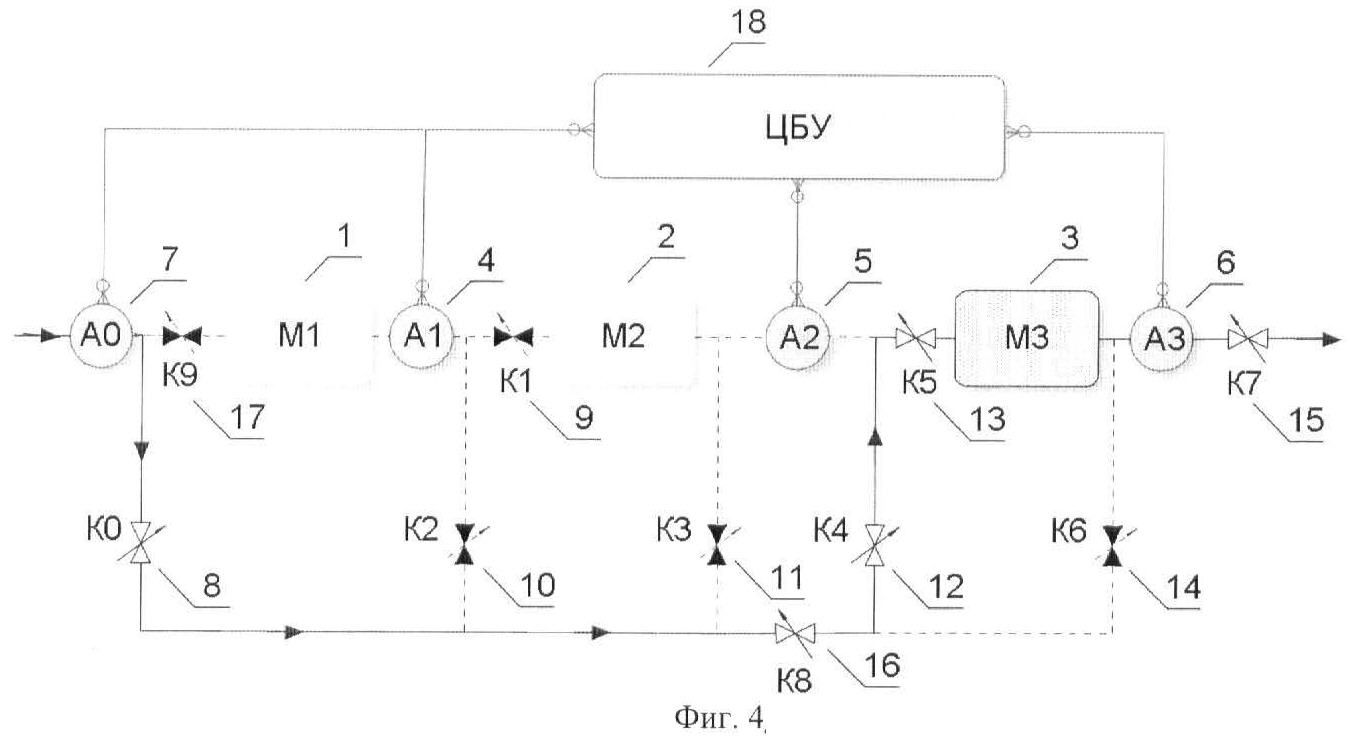
Режим 1 - согласно показаниям датчика А0 (7) содержание загрязняющих веществ в исходной воде возросло до величины, превышающей пороговое значение k3 cont, но оно меньше (или равно) порогового значения k2 cont: k3 cont≤kcont≤k2 cont. Автоматически включается модуль очистки М3 (3) - это происходит в результате включения клапанов К0 (8), К4 (12), К5 (13), К7 (15), К8 (16) и выключения клапанов К1 (9), К2 (10), К6 (11), К6 (14), К9 (17) по команде, отданной из ЦБУ (18) (см. фиг.4). В режиме 1 система работает в течение всего времени, пока показания анализатора А0 (7) соответствуют условию: k3 cont≤kcont≤k2 cont, а анализатора A3 (6) условию: kcont≤k3 cont. Если показания на А0 (7) остаются неизменными (k3 cont≤kcont≤k2 cont), а на A3 (6) обнаруживается превышение минимального 3-го порогового значения: kcont≥k3 cont, это означает, что модуль М3 (3) не справляется со своими функциями и требует замены.
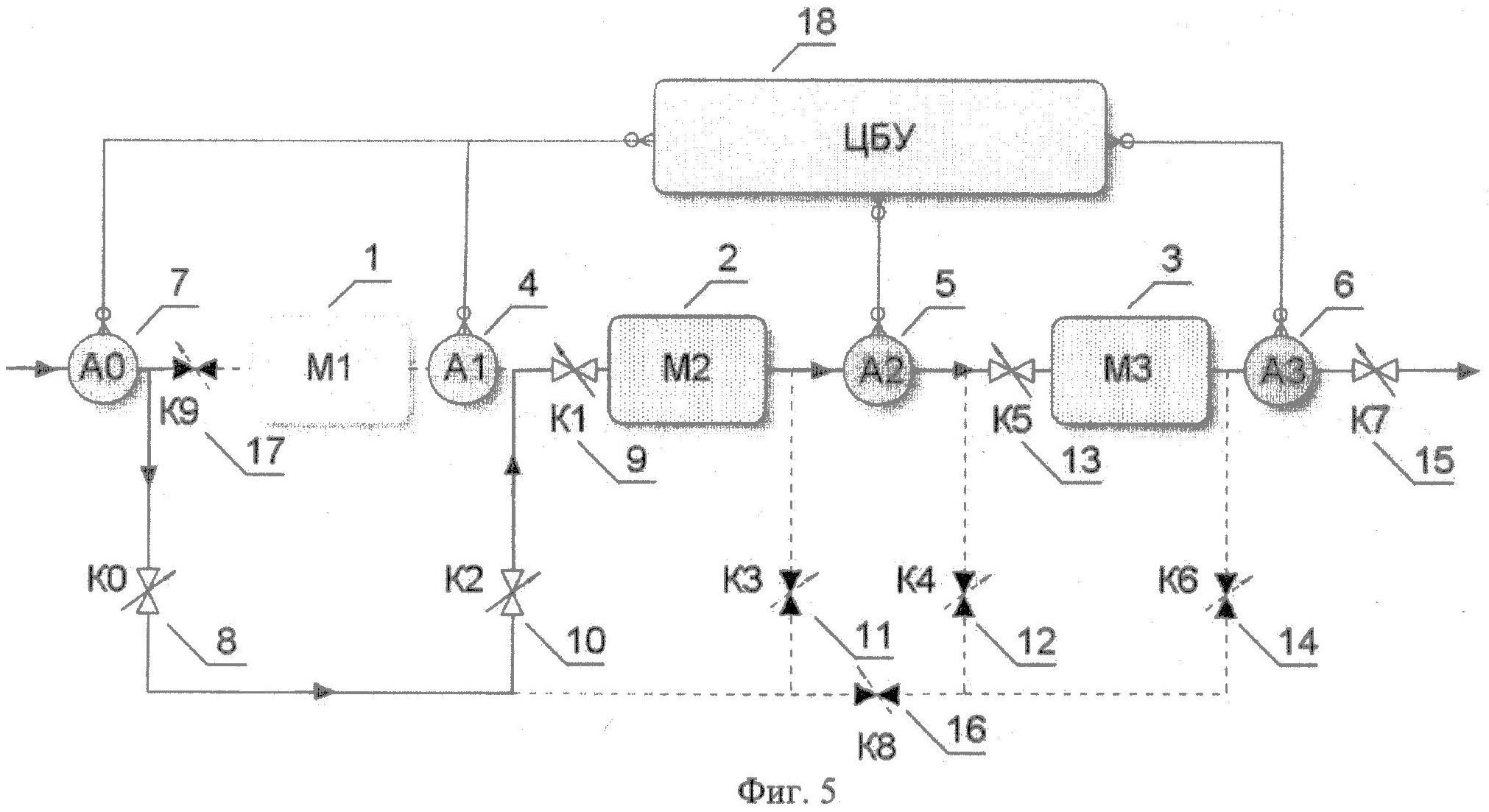
Режим 2 - согласно показаниям датчика А0 (7) содержание загрязняющих веществ в исходной воде возросло до величины, превышающей 2-е пороговое значение k2 cont, но оно меньше (или равно) первого порогового значения k1 cont: k2 cont≤kcont≤k1 cont. Автоматически включается, дополнительно к работающему модулю очистки М3 (3), модуль очистки М2 (2) - это происходит в результате включения клапанов К0 (8), К1 (9), К2 (10), К5 (13), К7 (15) и выключения клапанов К3 (11), К4 (12), К6 (14), К8 (16), К9 (17) по команде, отданной из ЦБУ (18) (см. фиг.5). В режиме 2 система работает, пока анализатор А2 (5) показывает kcont≤k2 cont, а анализатор A3 (6) - kcont≤k3 cont. При показаниях анализаторов: А2 - kcont≤k2 cont и A3 - k3 cont≤kcont≤k2 cont требуется заменить модуль М3, а при показаниях этих же анализаторов А2 и A3 - kcont≥k2 cont заменяется модуль М2.
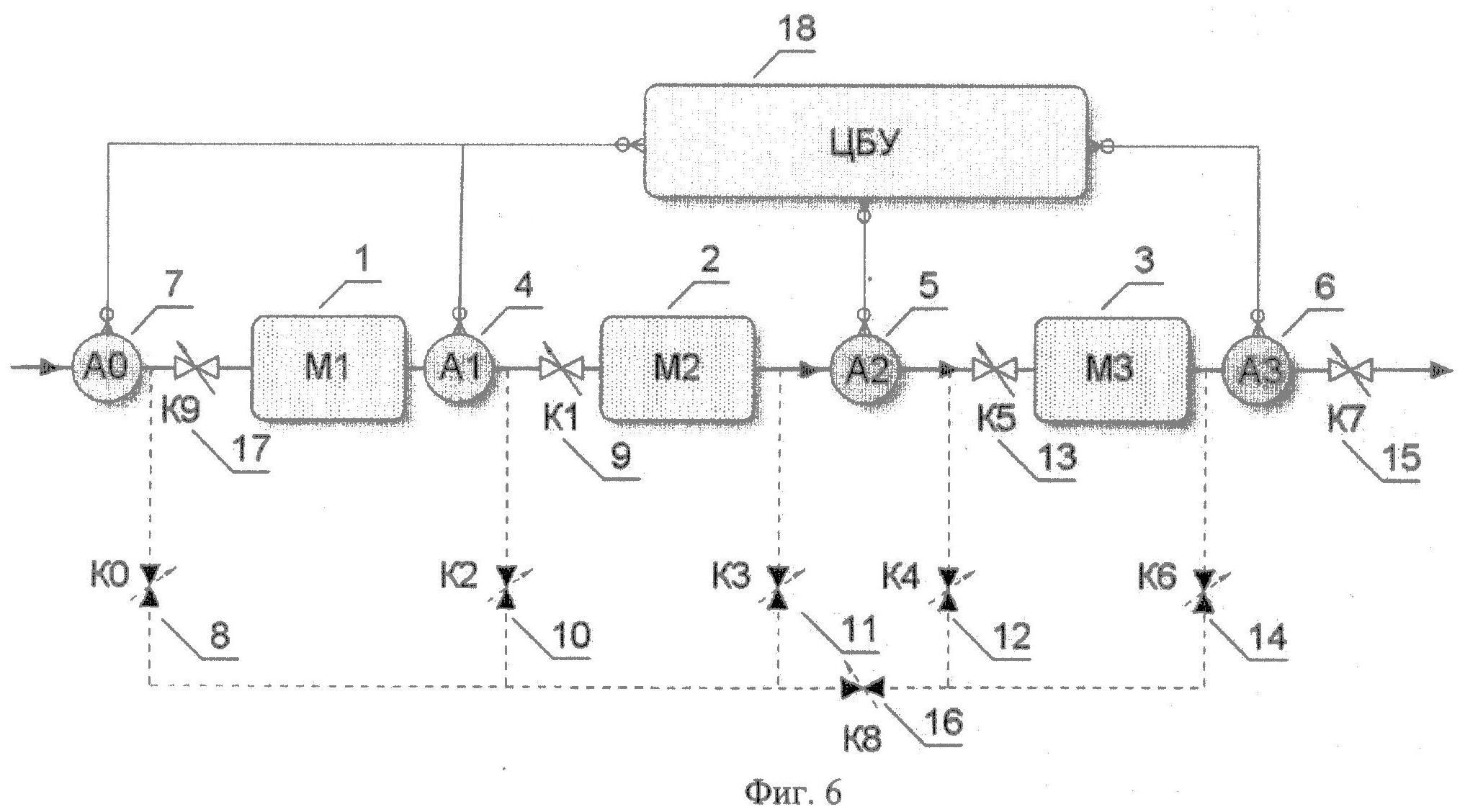
Режим 3 - согласно показаниям датчика А0 (7) содержание загрязняющих веществ в исходной воде возросло до величины, превышающей 1-е пороговое значение k1 cont, но оно меньше максимально допустимого загрязнения исходной воды k0 cont: k1 cont≤kcont≤k0 cont. Автоматически включаются клапаны К1 (9), К5 (13), К7 (15), К9 (17) и выключаются клапаны К0 (8), К2 (10), К3 (11), К4 (12), К6 (14), К8 (16). В этом режиме в системе работают все три модуля очистки: M1 (1), М2 (2), М3 (3) (см. фиг.6). В соответствии с показаниями датчиков-анализаторов (условия см. в таблице 1), как и при работе в режимах 1 и 2, производится замена модулей очистки М3, М2, M1. В случае, когда загрязнение исходной воды превышает максимально допустимое для данной системы: kcont≥k0 cont, раздается сигнал тревоги, и водоочистная система отключается.
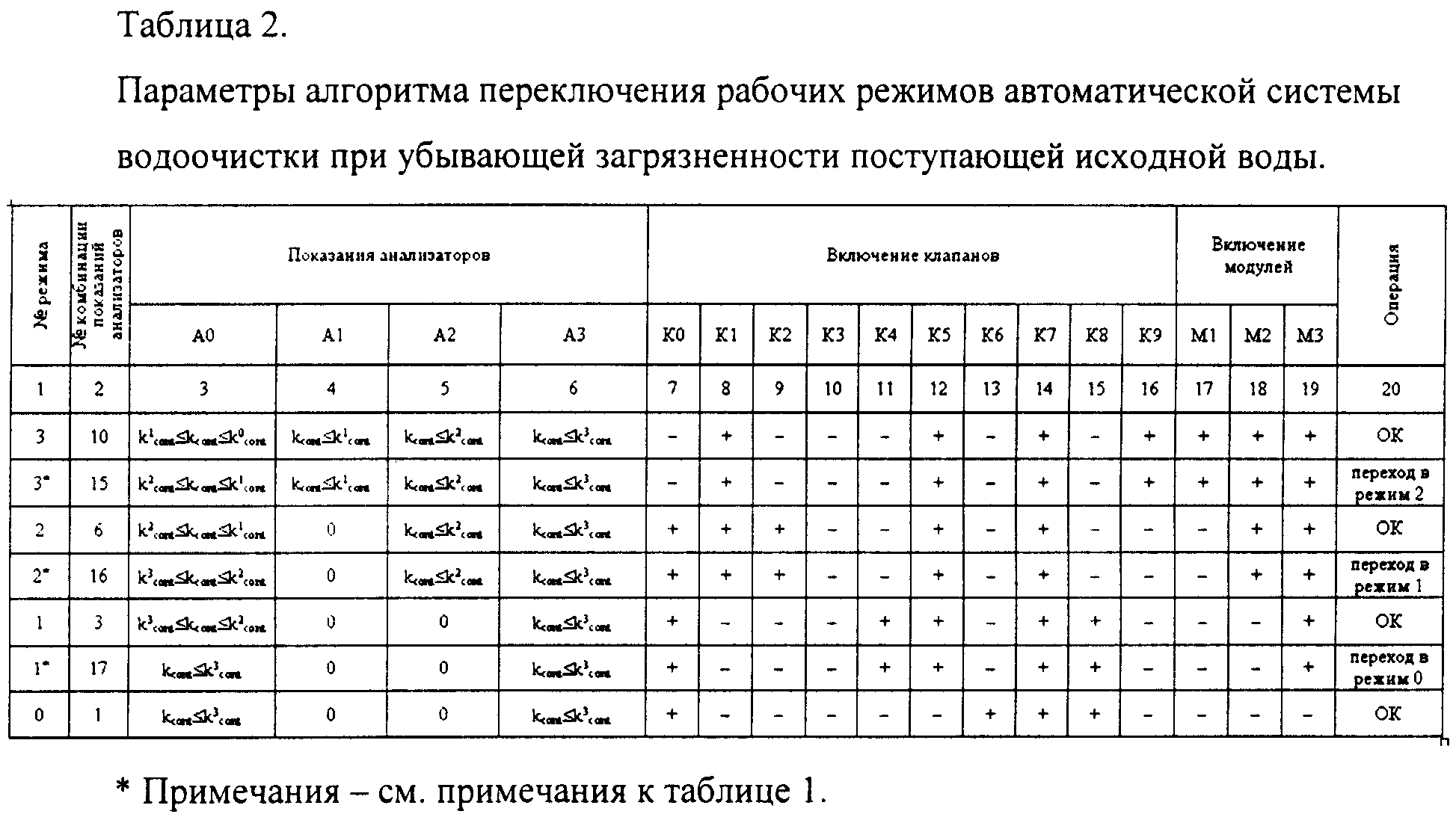
Б. Последовательность режимов работы при убывании загрязненности поступающей в систему исходной воды
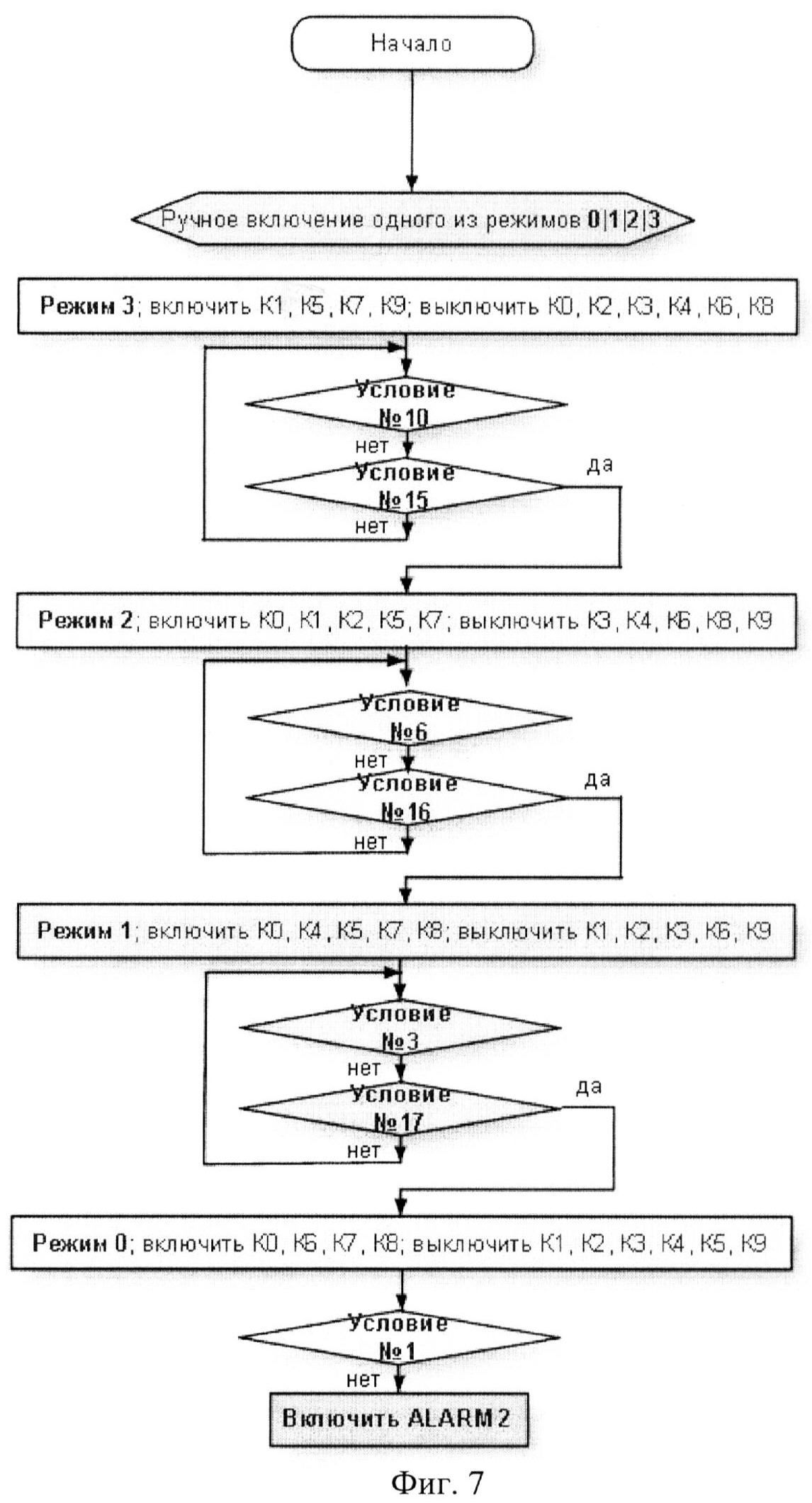
Алгоритм работы системы в данных режимах представлен на фиг.7, параметры алгоритма приведены в таблице 2. На фиг.7 номера условий соответствуют номерам условий во втором столбце таблицы 2, базирующихся на показаниях датчиков-анализаторов А0, A1, А2, A3, приведенных в столбцах 3-6 таблицы 2.
Режим 3 - рассмотрение начинаем с режима очистки, когда исходная вода максимально загрязнена (при условии, что уровень загрязнения не превышает порогового значения k0 cont) и включены все очищающие модули M1 (1), М2 (2), М3 (3) (см. фиг.6). При этом клапаны К1 (9), К5 (13), К7 (15), К9 (17) включены, а клапаны К0 (8), К2 (10), К3 (11), К4 (12), К6 (14), К8 (16) выключены. Если показания уровня загрязнения на анализаторах А0 (7), А1 (4), А2 (5), A3 (6) равны: k1 cont≤kcont≤k0 cont, kcont≤k1 cont, kcont≤k2 cont, kcont≤k3 cont, соответственно, то режим работы системы остается неизменным.
Режим 2 - как только уровень загрязнения исходной воды снизился - показания анализатора А0 (7) равны k2 cont≤kcont≤k1 cont - система автоматически переходит на рабочий режим 2 с функционирующими модулями М2 (2) и М3 (3) (модуль M1 (1) отключается), в котором клапаны К0 (8), К1 (9), К2 (10), К5 (13), К7 (15) включены, а клапаны К3 (11), К4 (12), К6 (14), К8 (16), К9 (17) выключены (см. фиг.5). В течение всего времени, пока показания анализаторов А0 (7), А2 (5), A3 (6) равны k2 cont≤kcont≤k1 cont, kcont≤k2 cont, kcont≤k3 cont, соответственно, система остается в данном режиме очистки.
Режим 1 - если уровень загрязнения исходной воды продолжает снижаться - показания анализатора А0 (7) равны k3 cont≤kcont≤k2 cont - система переключается в рабочий режим 1 с только одним работающим модулем очистки - модулем тонкой водоочистки М3 (3). Для этого автоматически включаются клапаны К0 (8), К4 (12), К5 (13), К7 (15), К8 (16) и выключаются клапаны К1 (9), К2 (10), К3 (11), К6 (14), К9 (17) (см. фиг.4). В этом состоянии система остается, пока на анализаторах А0 (7) и A3 (6) имеются показания k3 cont≤kcont≤k2 cont и kcont≤k3 cont, соответственно.
Режим 0 - когда уровень загрязнения исходной воды становится ниже минимального порогового значения - показания анализатора А0 (7) равны (или меньше) kcont≤k3 cont - исходная вода, минуя все выключенные модули очистки, поступает на выход, то есть включены клапаны К0 (8), К6 (14), К7 (15), К8 (16) и выключены клапаны К1 (9), К2 (10), К3 (11), К4 (12), К5 (13), К9 (17) (см. фиг.3).
Очевидно, что если в процессе работы системы качество исходной воды начнет ухудшаться, система автоматически переключится в состояние, соответствующее алгоритму работы при возрастании загрязненности (см. выше).
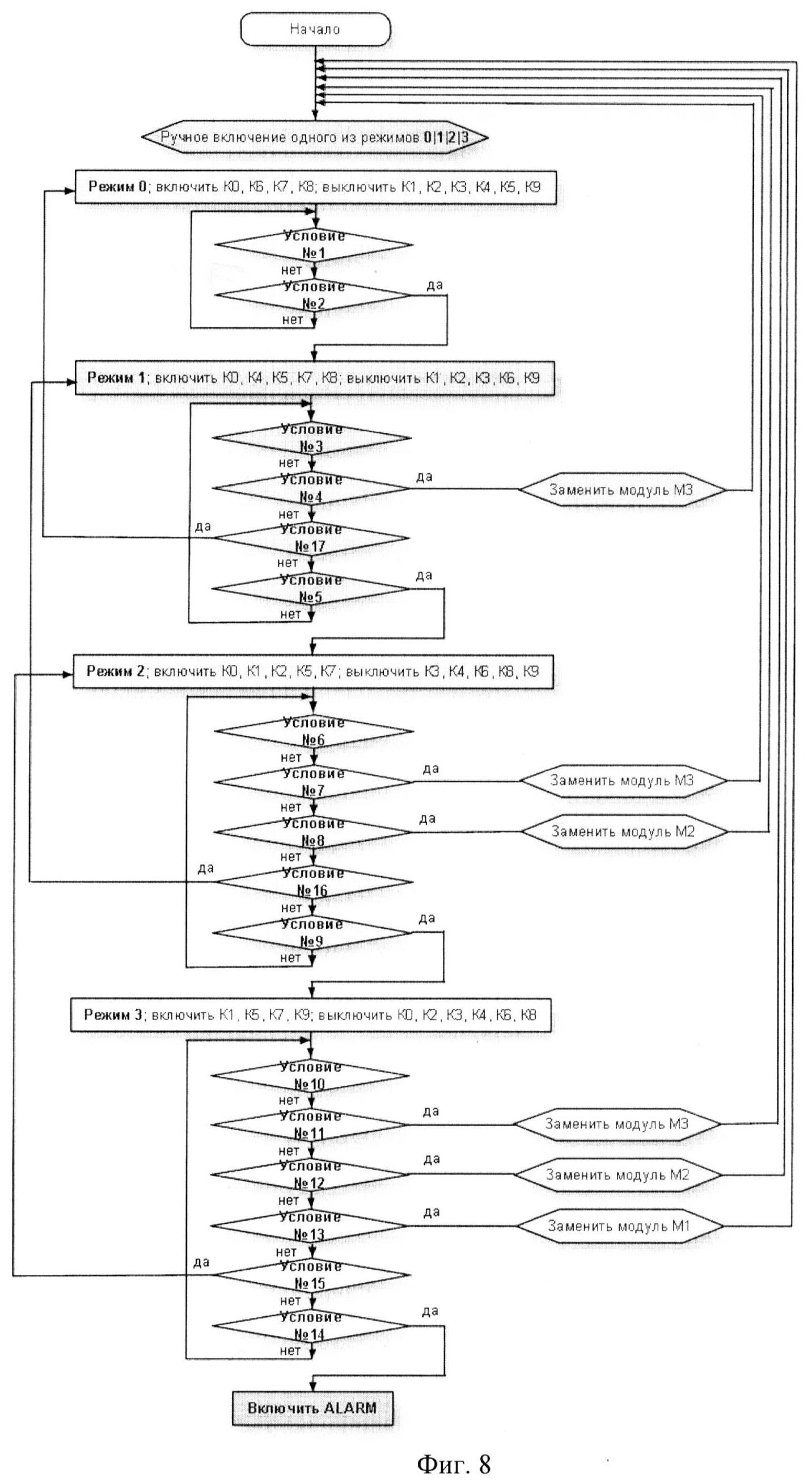
Алгоритмы работы системы при возрастании загрязненности (фиг.2) и при убывании загрязненности (фиг.7) могут быть объединены в единый алгоритм. Такой алгоритм для рассмотренного примера блочно-модульной установки трехуровневой водоочистки приведен на фиг.8.
Таким образом, предлагаемая система автоматического управления технологическим процессом очистки воды позволяет непрерывно проводить анализ качества воды по содержанию в ней загрязняющих веществ в различных точках технологической схемы и использовать эти данные для оперативной оптимизации процесса водоочистки.
Самолет с шасси на воздушной подушке
Способ определения интенсивности осадков в реальном времени в авиационных системах улучшенного видения
Аппарат на воздушной подушке с наземным движителем
Линейный асинхронный электропривод
Способ измерения скорости движения подводного объекта
Стенд для испытания конструкции летательного аппарата на механическую прочность под действием изгибающего момента
Способ ремонта кессона крыла с сетчатыми композиционными нервюрами, композиционной обшивкой и металлическими лонжеронами
Устройство для измерения составляющих векторов аэродинамической силы и момента
Ферменная нервюра крыла с композиционными стойками
Универсальная специализированная технологическая оснастка для лазерной размерной обработки тонкостенных деталей сложной пространственной конфигурации
Велосипедное шасси летательного аппарата
Самолет с шасси на воздушной подушке
Способ определения интенсивности осадков в реальном времени в авиационных системах улучшенного видения
Аппарат на воздушной подушке с наземным движителем
Линейный асинхронный электропривод
Способ измерения скорости движения подводного объекта
Стенд для испытания конструкции летательного аппарата на механическую прочность под действием изгибающего момента
Патрон двухкулачковый клиновой механизированный
Реактивное метательное устройство
Способ экспресс-обнаружения урана и его соединений

