Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНИМ ПРИВОДОМ КАПОТОВ РЕВЕРСОРА ТЯГИ ДЛЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ
Вид РИД
Изобретение
Изобретение относится к системе и способу управления, по меньшей мере, одним приводом капотов реверсора тяги для турбореактивного двигателя.
Назначение реверсора тяги состоит в повышении эффективности торможения самолета при его посадке путем перенаправления вперед, по меньшей мере, части тяги, развиваемой турбореактивным двигателем. На этом этапе реверсор перекрывает реактивное сопло, направляя этот поток к передней стороне гондолы, в результате чего создается обратная тяга, которая складывается с торможением колес самолета.
В зависимости от типа реверсора могут использоваться разные средства для достижения подобной переориентации холодного потока. Тем не менее, во всех случаях конструктивно реверсор включает в себя подвижные капоты, имеющие возможность перемещаться из выдвинутого положения, в котором они открывают в гондоле канал для отклоненного потока, в убранное положение, в котором они перекрывают указанный канал. Эти подвижные капоты могут, кроме того, выполнять функцию отклонения или всего лишь активации иных отклоняющих средств.
Так, например, в решетчатых реверсорах подвижные капоты скользят по направляющим рельсам таким образом, что при отходе назад на этапе раскрытия они высвобождают решетки отклоняющих лопаток, находящиеся в толще гондолы. Имеется система тяг, соединяющая этот подвижный капот с блокировочными створками, которые выдвигаются внутрь выпускной трубы, блокируя при этом выход в режиме прямой тяги. В реверсорах же створчатого типа каждый подвижный капот поворачивается таким образом, что он блокирует поток, отклоняя его, и является, таким образом, действующим органом в процессе указанной переориентации.
Привод таких подвижных капотов осуществляется, как правило, с помощью гидравлических или пневматических силовых цилиндров, для которых требуется отдельная сеть подачи текучей среды под давлением. Такую текучую среду традиционно получают либо путем отвода воздуха из турбореактивного двигателя при работе с пневматическими системами, либо отбором из самолетной гидравлической системы. Для подобных систем требуется проведение довольно значительных работ по техобслуживанию, поскольку малейшая утечка из гидравлической или пневматической сети может обнаруживаться с трудом и чревата негативными последствиями как для реверса, так и в других частях гондолы. Кроме того, учитывая наличие недостаточного свободного пространства в передней раме реверсора, монтаж и меры по защите подобной системы оказываются довольно сложными операциями и способствуют излишнему загромождению.
Для устранения разнообразных недостатков, связанных с пневматическими или гидравлическими системами, конструкторы реверсоров тяги предприняли попытки их замены, оборудуя свои реверсоры в максимально возможной степени более легкими и надежными электромеханическими приводами. Такой реверсор описан в документе ЕР 0843089.
Однако электромеханические приводы страдают также рядом недостатков, которые необходимо устранить, чтобы можно было в полной мере извлечь пользу из их преимуществ в отношении уменьшения веса и габаритов.
Так, в частности, при работе с электромеханическими приводами требуется использование комплексной электрической системы, включающей в себя приводы, силовые и контрольные компоненты, а также различные датчики, причем все эти компоненты подвержены разнообразным неисправностям.
В случае отказа одного из компонентов этой системы принято целиком выводить ее из эксплуатации, поскольку реверсор тяги уже нельзя использовать с эксплуатационными характеристиками, заданными в технических условиях.
Цель изобретения состоит в уменьшении частоты возникновения подобных случаев неработоспособности системы.
Для достижения указанной цели предложена система управления, по меньшей мере, одним приводом капота реверсора тяги для турбореактивного двигателя, содержащая группу приводных и/или контрольных компонентов, включающую в себя, по меньшей мере
- один привод капота, приводимый в действие, по меньшей мере, одним электродвигателем,
- средства управления приводом и электродвигателем,
- средства связи между средствами управления и системой управления летательным аппаратом,
отличающаяся тем, что средства управления выполнены таким образом, чтобы выявлять отказ приводного и/или контрольного компонента, определять, блокирует или не блокирует этот отказ работу системы, и в случае, когда отказ не является блокирующим, осуществлять перевод из режима нормальной работы в режим работы с адаптацией к отказу, в котором отказ приводного и/или контрольного компонента, по меньшей мере, частично компенсируется посредством корректирующего управления остальными приводными и/или контрольными компонентами.
Благодаря признакам изобретения удается переконфигурировать систему в реальном времени, обеспечив тем самым продолжение ее работы в случае, когда отказ не блокирует выполнения данной конкретной функции.
Учитывая тот факт, что при необходимости приведения в действие реверсора тяги учитывается состояние системы, можно привести его в действие в режиме с несколько ухудшенными характеристиками, благодаря которому в случае, когда отказ не блокирует работу системы, обеспечивается поддержание ее безопасной эксплуатации.
Таким образом, указанные меры позволяют повысить работоспособность системы, а значит, и реверсора тяги с электрическим приводом.
Целесообразно, чтобы система содержала, по меньшей мере, один датчик положения капота реверсора или положения привода капота реверсора, используемый для осуществления обратной связи по управлению приводами. В случае, когда один или ряд датчиков оказываются неисправными, средства управления выполняют корректирующее управление, уменьшая вращающий момент и/или скорость двигателя.
Хотя раскрытие и закрытие реверсора тяги становятся при этом более медленными, удается все-таки поддерживать его работу, несмотря на отказ датчика.
Благодаря пуску на низкой скорости удается предотвратить повреждение конструкции в случае отсутствия информации о положении.
Целесообразно, чтобы средства управления выявляли конец хода капота через увеличение вращающего момента и/или тока в двигателе.
В соответствии с одним из вариантов осуществления в случае частичного отказа электропитания системы или силового каскада системы средства управления выполняют корректирующее управление двигателем, чтобы уменьшить ток в двигателе таким образом, чтобы не был превзойден некоторый предельный ток, который может привести к отключению питания.
Хотя раскрытие и закрытие реверсора тяги становятся при этом более медленными, удается все-таки поддерживать его работу, несмотря на сбой в электропитании.
В соответствии с одним из вариантов осуществления в случае отказа двигателя средства управления выполняют корректирующее управляющее действие по раскрытию реверсора тяги, состоящее в разблокировании, по меньшей мере, одного замка капота, причем раскрытие капота осуществляется с использованием аэродинамического эффекта.
Целесообразно, чтобы средства управления выполняли определение направления перемещения привода и/или капота под действием аэродинамических нагрузок с целью блокировки перемещения в направлении закрытия с помощью тормоза двигателя.
В соответствии с одним из вариантов осуществления система содержит средства предупреждения пользователя в случае, когда система работает в режиме работы с адаптацией к отказу.
Благодаря этим мерам удается предупреждать пользователя (например, пилота) о том, что произошло незначительное ухудшение эксплуатационных характеристик реверсора тяги.
Предметом изобретения является также способ управления, по меньшей мере, одним приводом капотов реверсора тяги для турбореактивного двигателя, включающий в себя следующие этапы:
- выполняют выявление отказа в системе управления приводом,
- определяют, блокирует или не блокирует этот отказ работу системы,
- в случае, когда отказ не является блокирующим, осуществляют выбор режима работы с адаптацией к отказу в зависимости от типа выявленного не блокирующего отказа,
- применяют выбранный режим работы с адаптацией к отказу.
Изобретение станет более понятным в ходе изучения нижеследующего описания, приводимого со ссылками на приложенные схематические чертежи, которые иллюстрируют один из вариантов выполнения системы в качестве примера, не имеющего ограничительного характера.
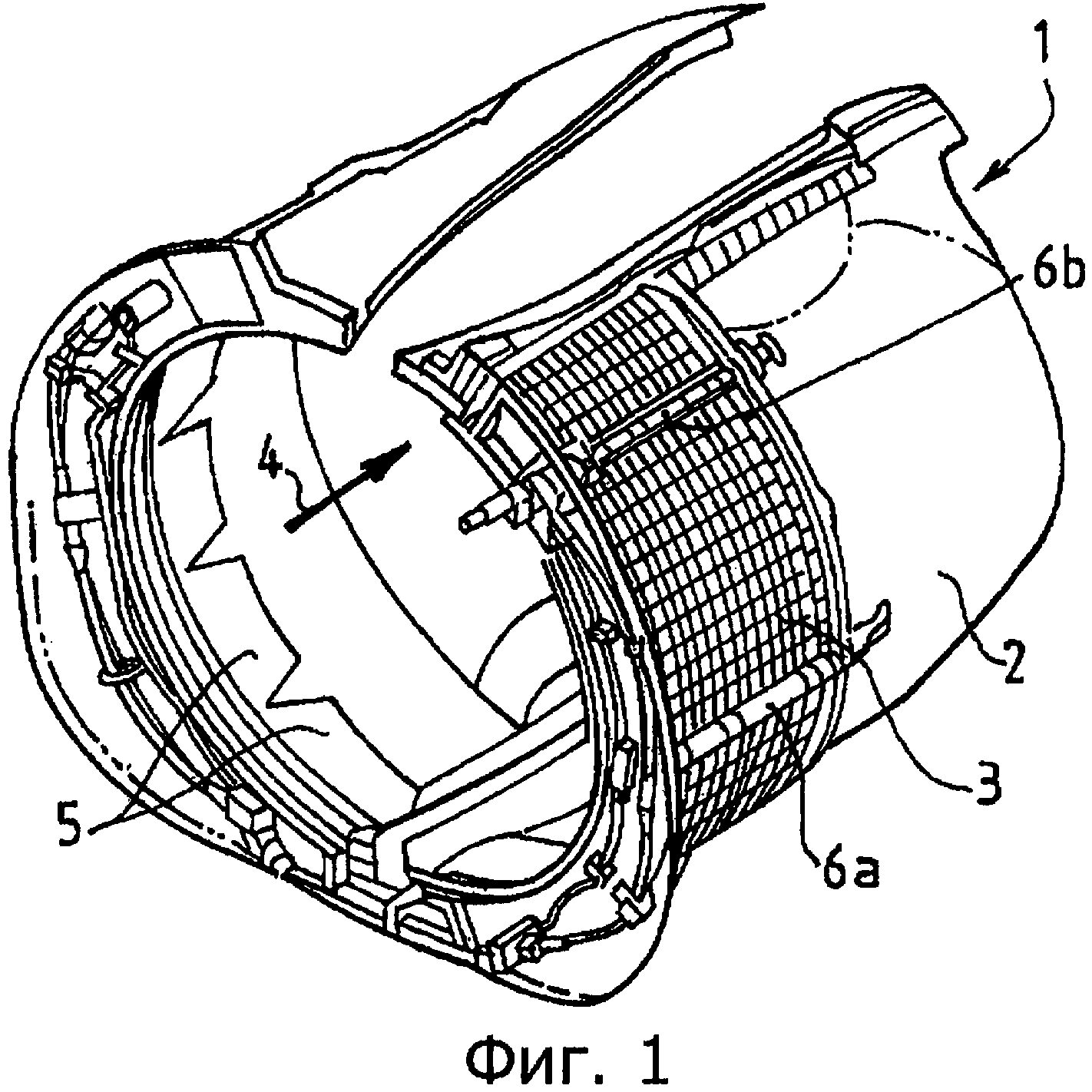
Фиг.1 представляет собой частичный схематический вид в аксонометрии гондолы с помещенным в нее решетчатым реверсором тяги;
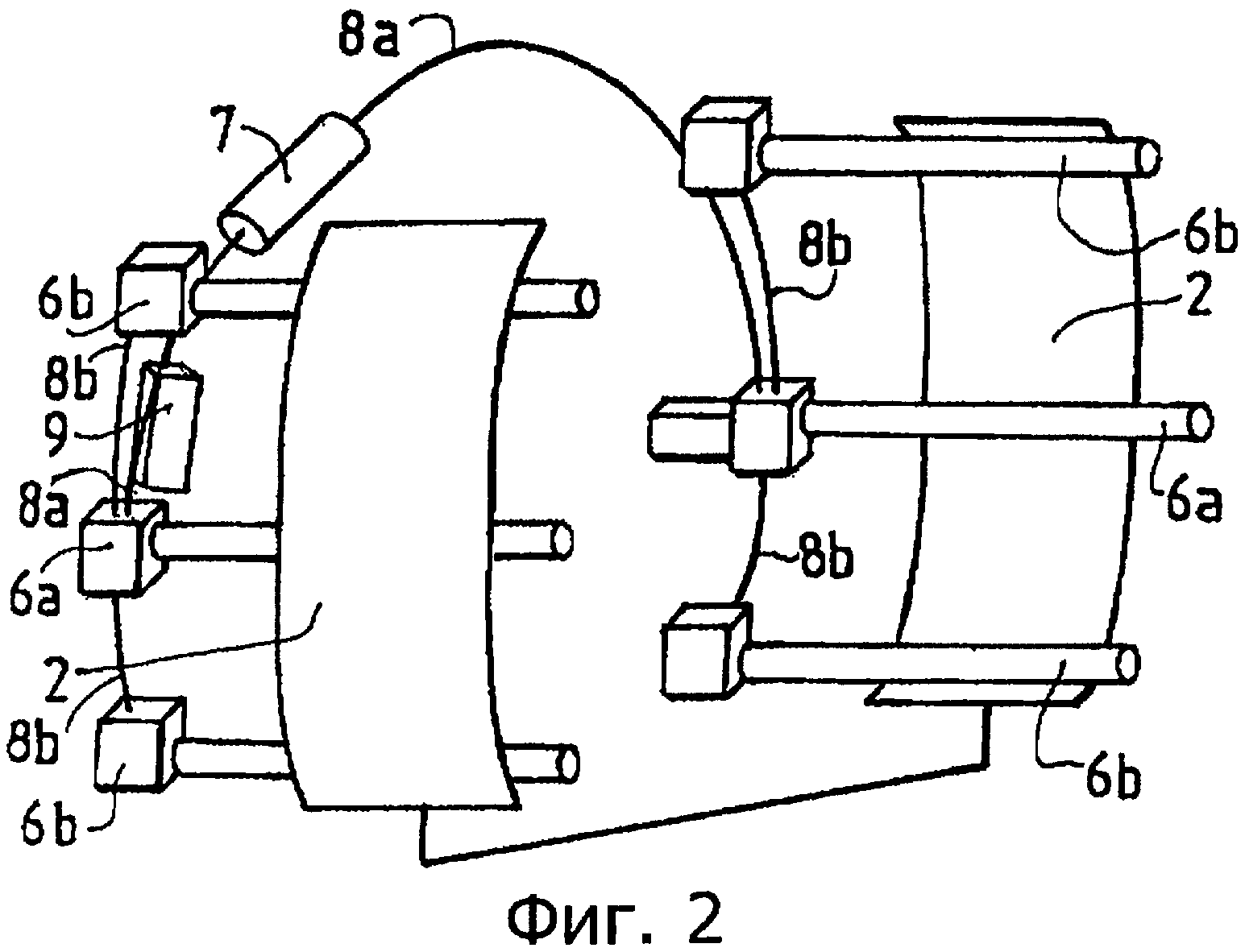
фиг.2 - схематическое изображение подвижных капотов и их приводной системы;
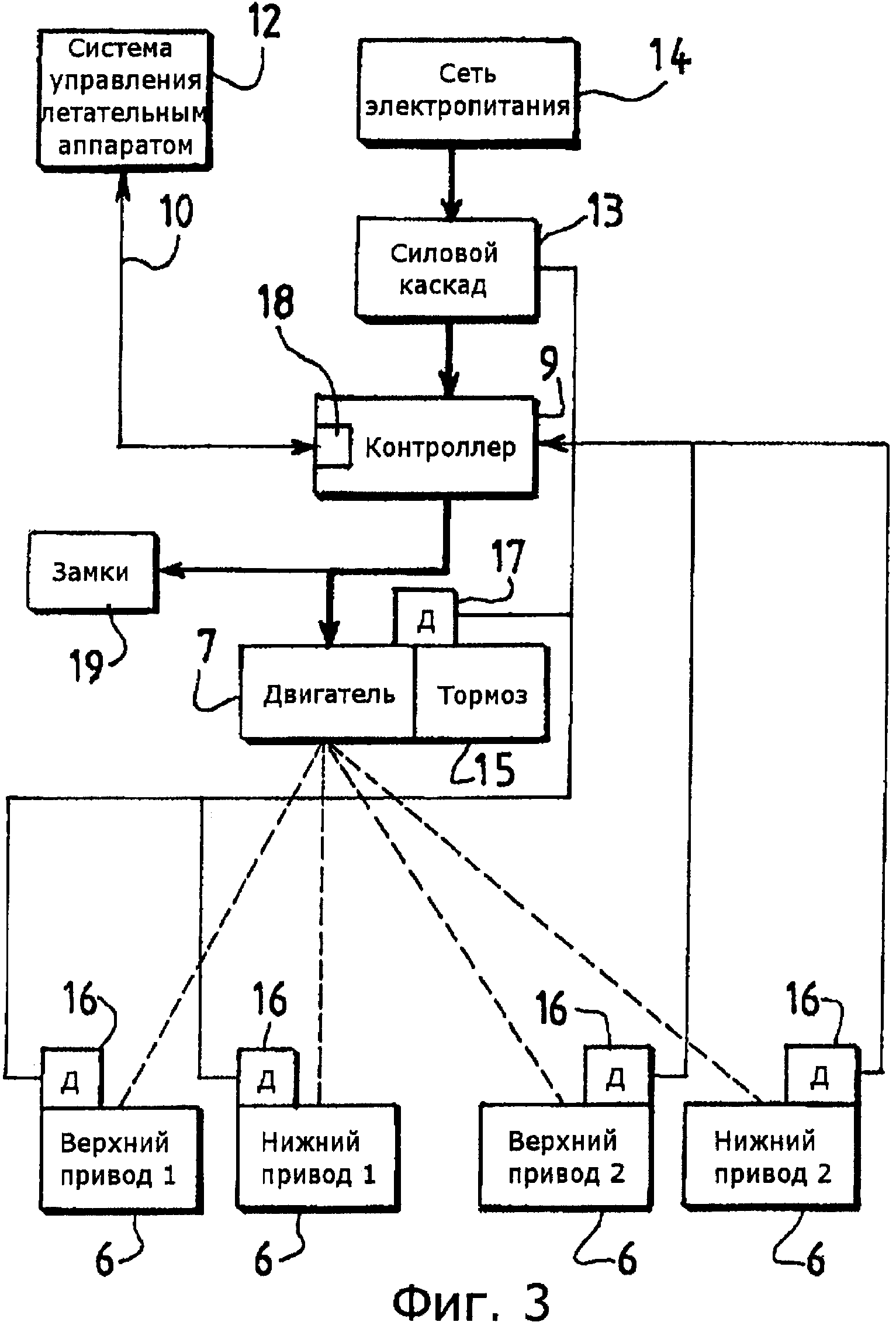
фиг.3 - схематическое изображение системы управления приводами подвижных капотов;
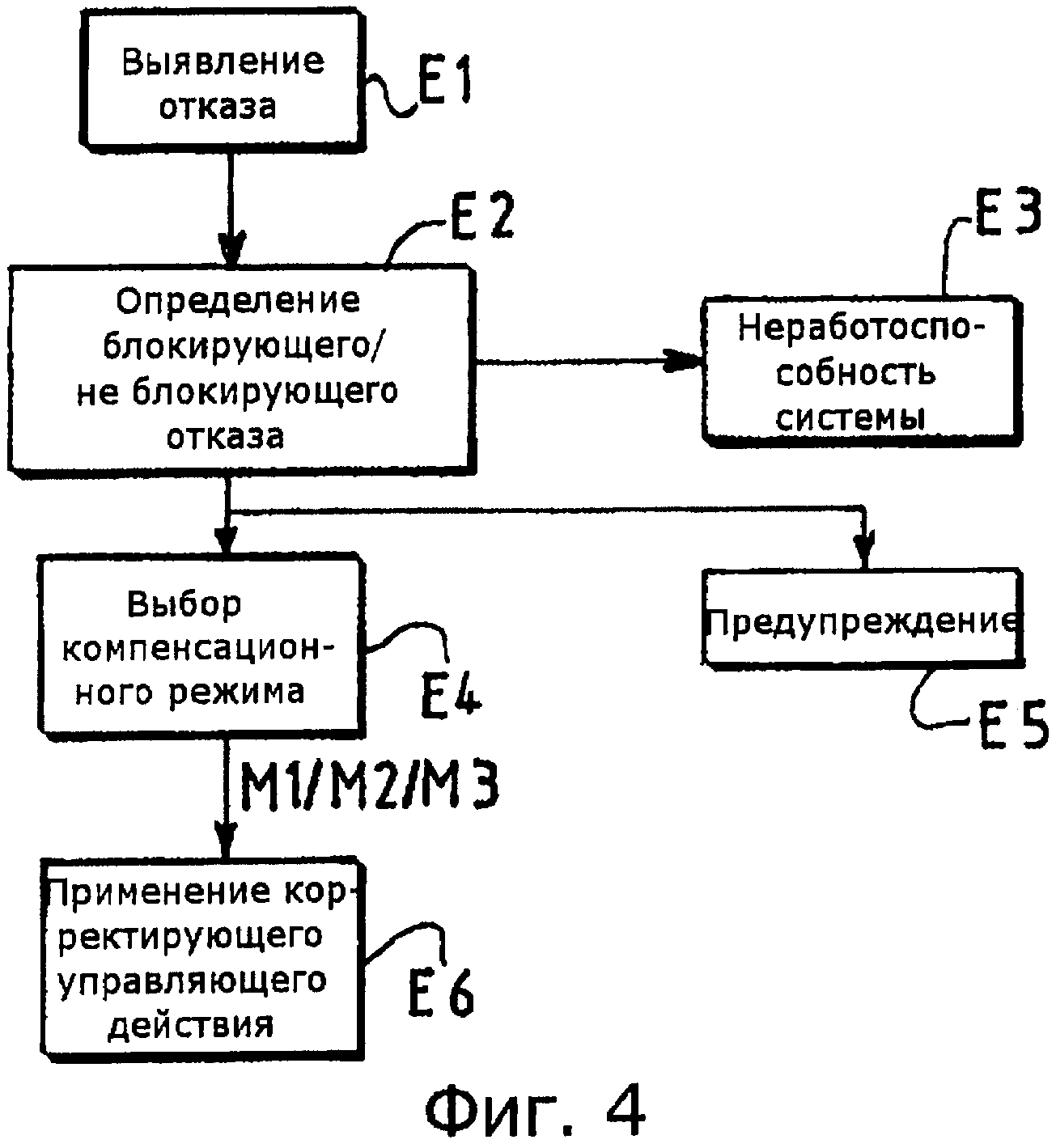
фиг.4 - блок-схема, иллюстрирующая этапы способа согласно изобретению.
Прежде чем перейти к детальному описанию одного из вариантов осуществления изобретения, важно уточнить, что рассматриваемые здесь способ и система не ограничиваются каким-то одним частным типом реверсора тяги. Хотя изобретение описано здесь применительно к решетчатому реверсору, его вполне можно использовать и для других конструкций реверсоров, в частности створчатых.
На фиг.1 приведен частичный схематический вид гондолы с помещенным в нее реверсором тяги 1. Турбореактивный двигатель здесь не показан. Указанный реверсор тяги 1 имеет конструкцию, включающую в себя два полукруглых подвижных капота 2, которые могут совершать скользящее перемещение, приоткрывая решетки 3 отклоняющих лопаток, находящиеся между подвижными капотами 2 и секцией для пропускания отклоняемого воздушного потока 4. Внутри конструкции помещены блокировочные створки 5, выполненные с возможностью поворота и перехода из положения, в котором они не препятствуют циркуляции воздушного потока 4, в положение, в котором они блокируют эту циркуляцию. Для того чтобы добиться координации раскрытия подвижных капотов 2 с перекрывающим положением блокировочных створок 5, последние механически соединены с подвижным капотом 2 с помощью шарниров и с неподвижной конструкцией с помощью системы тяг (не показаны).
Перемещение подвижных капотов 2 вдоль наружной поверхности конструкции обеспечивается с помощью группы силовых цилиндров 6а, 6b, смонтированных на передней раме, внутри которой помещены электродвигатель 7 и гибкие передаточные валы 8а, 8b, присоединенные, соответственно, к силовым цилиндрам 6а, 6b с целью их приведения в действие.
Система привода подвижных капотов 2 показана отдельно на фиг.2. Каждый подвижный капот 2 может совершать поступательное перемещение под действием трех силовых цилиндров 6а, 6b, в состав которых входят один центральный силовой цилиндр 6а и два дополнительных силовых цилиндра 6b, которые приводятся в действие одним электродвигателем 7, подключенным к средствам управления 9, включающим в себя микроконтроллер. Выходная мощность электродвигателя 7 подается, прежде всего, на центральные силовые цилиндры 6а через посредство двух гибких передаточных валов 8а, а затем на дополнительные силовые цилиндры 6b через посредство гибких передаточных валов 8b.
В соответствии с одним из непредставленных здесь вариантов, для каждого капота используются только два силовых цилиндра, верхний и нижний, которые приводятся в действие одним электродвигателем, подключенным к управляющему интерфейсу. Выходная мощность электродвигателя подается на два силовых цилиндра, верхний и нижний, через посредство двух гибких передаточных валов 8а.
На фиг.3 схематически изображена система управления приводом двух капотов с использованием для каждого капота двух приводов - верхнего и нижнего.
Как видно на фиг.3, предлагаемая система управления приводами реверсора тяги содержит средства управления, образованные микроконтроллером 9.
Этот микроконтроллер соединен с помощью средств связи 10 с системой 12 управления летательным аппаратом.
Кроме того, в состав системы управления входит силовой каскад 13, соединенный с бортовой сетью 14 электропитания летательного аппарата.
Микроконтроллер 9 обеспечивает управление работой электродвигателя 7 и силовых цилиндров или приводов, 6, как описано выше. Двигатель содержит также тормоз 15, работой которого управляет тот же микроконтроллер 9.
Некоторые из приводов 6 снабжены датчиками положения 16, с помощью которых можно определять перемещение привода 6 между раскрытым и закрытым положениями. Точно так же двигатель и/или тормоз снабжены датчиками положения 17, с помощью которых тоже можно определять направление перемещения приводов 6 и, следовательно, капотов 2.
В состав системы входят также средства предупреждения пользователя в случае, когда система работает в режиме работы с адаптацией к отказу, как описано ниже. Эти средства образованы простым интерфейсом 18 с использованием средств связи 10 с системой 12 управления летательным аппаратом, которая и направляет предупреждение пилоту.
Микроконтроллер 9 управляет также отпиранием и запиранием замка 19 капота, который называют «основным замком». Этот замок препятствует нежелательному раскрытию капота 2.
Микроконтроллер 9 выполнен таким образом, чтобы выявлять отказ приводного и/или контрольного компонента, определять, блокирует или не блокирует этот отказ работу системы, и в случае, когда отказ не является блокирующим, осуществлять перевод из режима нормальной работы в режим работы с адаптацией к отказу, в котором неисправность компонента, по меньшей мере, частично компенсируется посредством корректирующего управления остальными приводными и/или контрольными компонентами.
Основные типы отказов, которые могут происходить в системе и компенсироваться путем перевода в режим работы с адаптацией к отказу, - это неисправности датчиков 17, 16, неисправности двигателя 7 или частичные сбои в электропитании.
Первый режим М1 с адаптацией к отказу используется в случае неисправности датчика 16 положения капота 2 реверсора тяги.
Информацию о положении капота 2 используют для выполнения обратной связи по управлению приводом. В частности, в зависимости от положения капота 2 может изменяться скорость раскрытия или закрытия, причем она уменьшается по мере приближения к точке упора.
В случае возникновения отказа и, следовательно, отсутствия информации и положении капота 2 при работе в режиме М1 с адаптацией к отказу, микроконтроллер 9 выполняет корректирующее управление, уменьшая вращающий момент и/или скорость двигателя 7 и определяя конец хода через увеличение вращающего момента и/или тока в двигателе.
Второй режим М2 с адаптацией к отказу используется в случае частичного сбоя в работе силового каскада 13 или сети электропитания 14. В частности, один из известных типов такого отказа - это потеря одной из фаз в трехфазной сети.
В данном случае микроконтроллер 9 выполняет корректирующее управление двигателем 7 по двум фазам, уменьшая вращающий момент этого двигателя и, следовательно, силу тока в нем таким образом, чтобы не был превзойден некоторый предельный ток, который может привести к отключению питания в сети 14.
Это достигается тем, что в сети питания 14 предусмотрено специальное предохранительное устройство типа автоматического выключателя, которое отключает питание, когда для нагрузки, подключенной к этой сети, требуется слишком большой ток.
Третий режим М3 с адаптацией к отказу используется в случае неисправности двигателя.
В этом случае микроконтроллер 9 выполняет корректирующее управляющее действие по раскрытию капота 2 реверсора, состоящее в разблокировании, по меньшей мере, одного замка 19 капота и переводе двигателя 7 в режим «свободного хода», то есть деактивации его тормоза 15. При этом аэродинамические эффекты будут способствовать раскрытию капота 2 реверсора тяги.
Микроконтроллер 9 определяет направление перемещения привода и/или капота под действием аэродинамических нагрузок, блокируя с помощью тормоза 15 перемещение в направлении закрытия, если подобное перемещение будет обнаружено.
На фиг.3 приведена блок-схема, иллюстрирующая различные этапы способа согласно изобретению.
На первом этапе Е1 выявляют отказ в системе. На втором этапе Е2 определяют, блокирует или не блокирует этот отказ работу системы. Если блокирует, то система сигнализирует о своей неработоспособности на третьем этапе ЕЗ.
В противном случае на четвертом этапе Е4 выполняется выбор одного из режимов М1, М2, М3 работы с адаптацией к отказу в зависимости от типа выявленного неблокирующего отказа.
На пятом этапе Е5 применяют выбранный режим М1, М2 или М3 работы с адаптацией к отказу.
Следует иметь в виду, что описанный выше способ управления можно запрограммировать на компьютере с помощью соответствующих программных средств.
Разумеется, изобретение не ограничивается единственным вариантом осуществления системы, описанным выше в качестве примера, а напротив, охватывает его всевозможные модификации.
Соединительное устройство для соединения подвижных относительно друг друга первого и второго элементов
Гондола турбореактивного двигателя
Телескопический линейный исполнительный механизм двойного действия с приводом от одного двигателя
Реверсор тяги решетчатого типа и авиационная гондола, оборудованная таким реверсором тяги
Сдвоенный уплотнитель
Гондола, оснащенная по меньшей мере одним клапаном избыточного давления
Соединительное устройство для соединения первого и второго элементов, шарнирно поворотных относительно друг друга
Система управления, по меньшей мере, одним приводом капотов реверсора тяги для турбореактивного двигателя
Сотовая конструкция для звукопоглощающей панели
Способ и система управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя
Соединительное устройство для соединения подвижных относительно друг друга первого и второго элементов
Гондола турбореактивного двигателя
Телескопический линейный исполнительный механизм двойного действия с приводом от одного двигателя
Реверсор тяги решетчатого типа и авиационная гондола, оборудованная таким реверсором тяги
Сдвоенный уплотнитель
Гондола, оснащенная по меньшей мере одним клапаном избыточного давления
Соединительное устройство для соединения первого и второго элементов, шарнирно поворотных относительно друг друга
Система управления, по меньшей мере, одним приводом капотов реверсора тяги для турбореактивного двигателя
Сотовая конструкция для звукопоглощающей панели
Способ и система управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя

