Результат интеллектуальной деятельности: Бесплатформенный инерциальный измерительный блок
Вид РИД
Изобретение
Область техники.
Предлагаемое решение относится к области измерительной техники и приборостроения и может быть использовано в инерциальных системах подвижных объектов, летательных аппаратов и системах безопасности транспортных средств.
Уровень техники.
Известен блок преобразователей механической величины в виде линейного ускорения или угловой скорости (патент RU №2432548), в котором использованы шесть однотипных преобразователей механической величины: акселерометров или датчиков угловой скорости (ДУС), измерительные оси (ИО) которых ориентированы по многограннику (додекаэдру). На каждой из шести граней многогранника, предназначенных для установки преобразователей механической величины, установлен один преобразователь.
Недостатком этой конфигурации является малая точность, которая обусловлена наличием переменных перекрестных связей между чувствительными элементами. Изменение связей происходит при изменении ориентации осей отдельно взятого элемента относительно осей других отдельно установленных чувствительных элементов из-за деформации конструкции объекта при движении.
Известен также принятый за прототип бесплатформенный инерциальный измерительный блок (патент RU 2162203), содержащий гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчик температуры, размещенные на основании, закрепленном на подложке, на которой установлены сборки сервисной электроники, в котором подложка выполнена в виде платы из диэлектрика, а основание - в виде правильной шестиугольной усеченной пирамиды, по меньшей мере на трех боковых гранях которой размещены чувствительные элементы гироскопов-акселерометров, а на меньшей торцевой грани - датчик температуры, при этом основание по плоскости большей торцевой грани закреплено в центральной части подложки, а микросборки сервисной электроники установлены вокруг основания по периферии подложки. В этом устройстве число чувствительных элементов гироскопов-акселерометров ограничено конструкцией основания и составляет шесть, что является недостаточным для необходимого резервирования.
Однако улучшение параметров путем установки дополнительных гироскопов-акселерометров на известных основаниях может привести к значительному увеличению веса и габаритов, а также к появлению дополнительных погрешностей измерений, влияющих на конечную точность прибора.
Технической задачей предлагаемого решения является создание бесплатформенного инерциального блока, на основании которого можно установить большее количество дополнительных чувствительных элементов гироскопов-акселерометров при одновременном снижении массогабаритных характеристик.
Техническим результатом предлагаемого решения является уменьшение массогабаритных характеристик при резервировании датчиков, а также повышение надежности работы за счет увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений.
Раскрытие сущности.
Указанный технический результат достигается тем, что основание для установки блоков гироскопов-акселерометров выполнено в виде жестко скрепленных между собой перпендикулярно друг другу в двух точках их соприкосновения сферических поясов, на внешней поверхности которых размещены подложки для крепления восьми блоков акселерометров и гироскопов с электродами возбуждения колебаний и съема информации, установленные в точках сопряжения сферических поясов с вершинами внутренних углов условного куба и условных тетраэдеров.
Такая конструкция позволяет установить большее количество измерительных устройств и снизить погрешности навигации существенно ниже погрешностей отдельных чувствительных элементов в связи с использованием условного куба и тетраэдров для повышения точности определения мест установки гироскопов-акселерометров на сферических поясах. Точность определения навигационных параметров и параметров ориентации повышается за счет уменьшения случайной и систематической составляющих и увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений.
Краткое описание чертежей.
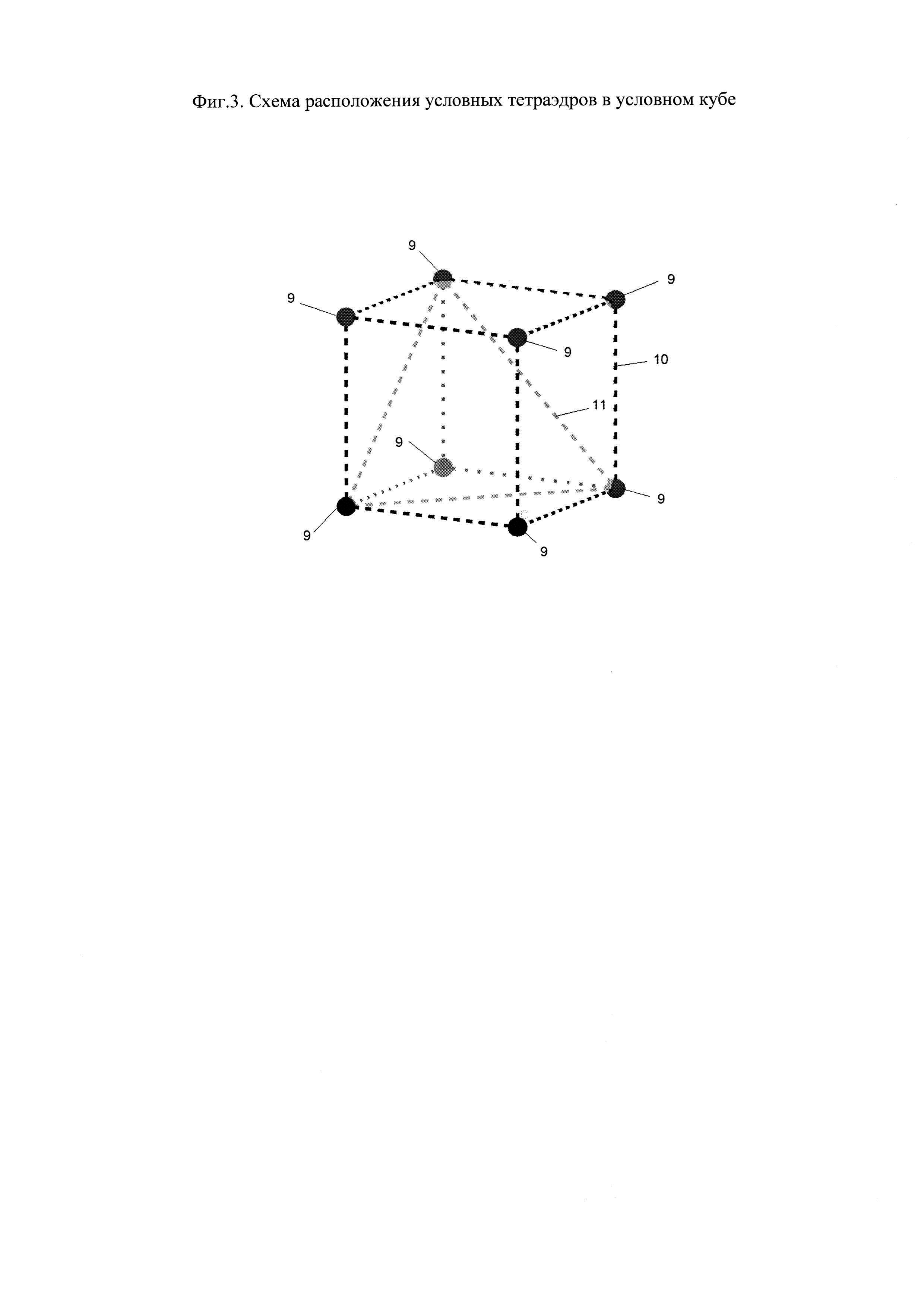
Фиг. 1 - общий вид бесплатформенного инерциального измерительного блока. Фиг. 2 - схема расположения условного куба внутри сферических поясов. Фиг. 3-схема расположения условных тетраэдров в условном кубе.
Фиг. 4 - структурная схема обработки информации с бесплатформенного инерциального измерительного блока.
Осуществление.
На подвижном объекте (на чертеже не показан) на подложке 1 закреплено посредством опорных элементов 2 основание 3 для размещения восьми чувствительных элементов (фиг. 1), которые содержат гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчики температуры. Основание 3 выполнено в виде двух сферических поясов 4 и 5 жестко скрепленных между собой посредством силовых приливов 6 (или другого вида крепления) перпендикулярно друг другу в точках их соприкосновения.
На внешних поверхностях сферических поясов 4 и 5 закреплены восемь подложек 7, на которых закреплены восемь гироскопов-акселерометров 8 с датчиками температуры и другими необходимыми устройствами (на чертеже не показаны) для компенсации температурных погрешностей с двусторонней разводкой и в защитном стандартном корпусе с выводами электрической схемы сервисной электроники (на чертеже не показано). Подложки 7 и гироскопы-акселерометры 8 закреплены в точках сопряжения 9 (фиг. 2) сферических поясов 4 и 5 с вершинами внутренних углов условного куба 10 и условных тетраэдеров 11 (фиг. 3). Для определения мест установки восьми гироскопов-акселерометров 8 на подложках 7 в точках сопряжения 9 использовалось лазерное моделирование.
Во многих отраслях, в т.ч. и при развитии способностей технического конструирования и моделирования (Матвеева Т.Ф., https://urok.lsept.ru/articles/530955), используется лазерное моделирование, с помощью которого для повышения точности расположения восьми гироскопов-акселерометров 8 на сферических поясах 4 и 5 авторами было произведено вписывание в них условного куба 10, а в него условных тетраэдров 11 (фиг. 2 и 3), определены точки их сопряжения 9 со сферическими поясами 4 и 5, а после закрепления восьми гироскопов-акселерометров 8 в этих точках сопряжения 9, была проведена начальная выставка, при этом вектора чувствительности (на чертеже не показано) каждого из восьми гироскопов-акселерометров 8 расположены по осям, совпадающим с соответствующими диагоналями условного куба 10, а одна из диагоналей этого куба совпадает с линией направления движения или полета (на чертеже не показано).
В условном кубе 10 углы пересечения диагоналей постоянны, но не могут быть точно подсчитаны из-за иррациональных значений диагонали грани условного куба 10 куда входит множитель, равный  (при значении ребра куба равной единице) и величины диагонали самого условного куба 10, где одна из величин кратна
(при значении ребра куба равной единице) и величины диагонали самого условного куба 10, где одна из величин кратна  Одинаковость сторон условных тетраэдров 11 и вертикальность их высот к их основаниям обеспечивает постоянность диагоналей сторон условного куба 10. Для повышения точности диагоналей условного куба 10 из каждой его вершины располагают восемь условных тетраэдров 11 по схеме, показанной на фиг. 3
Одинаковость сторон условных тетраэдров 11 и вертикальность их высот к их основаниям обеспечивает постоянность диагоналей сторон условного куба 10. Для повышения точности диагоналей условного куба 10 из каждой его вершины располагают восемь условных тетраэдров 11 по схеме, показанной на фиг. 3
Структурная схема обработки информации представлена на фиг. 4.
Работа бесплатформенного инерциального измерительного блока осуществляется следующим образом.
При движении каждый из восьми гироскопов-акселерометров 8 бесплатформенного инерциального измерительного блока 12 под воздействием генераторов датчика угла 13 и системы возбуждения 14, регуляторов напряжения системы возбуждения 15, усилителя датчика температуры 16, блок синхронных детекторов 17, блок фильтров гироскопов 18, блок фильтров акселерометров 19 и блок регуляторов добротности 20 измеряет соответствующую проекцию линейного ускорения объекта (угловой скорости) на ось чувствительности и выдает результаты измерений.
Полученные выходные сигналы фильтруют и вычисляют навигационные параметры.
Предлагаемая схема размещения (выбора мест расположения) инерциальных элементов повышает их точность и надежность за счет большего числа взаимоориентированных датчиков, получаемые выходные параметры которых дополняют друг друга, проще обрабатываются и дают более точный усредненный результат, а выход из строя любого из датчиков не приводит к существенному искажению выходных измерительных параметров. В условном кубе 10 углы пересечения диагоналей постоянны, как и диагонали сторон, которые обеспечивают одинаковость как самих условных тетраэдров 11, так и вертикальность высот условных тетраэдров 11 к их основаниям, но существование и неизбежность технологических ошибок требует проведения подсчета и определения углов наклона с точностью не хуже 23х дуговых секунд, как и измерение линейных величин условного куба 10 и сферических поясов 4 и 5 должны быть не более 0,2 мм, при этом за счет «осреднения» получаемых величин и возможности резервирования минимизируются результирующие показатели точности.
Положительный эффект от внедрения предлагаемого решения проверен авторами опытным путем, при макетировании заявляемой конструкции основания с установкой на сферических поясах 4 и 5 восьми гироскопов-акселерометров 8. В результате точность определения суммарного сигнала была повышена более чем в четыре раза.
Для подтверждения работоспособности предлагаемого бесплатформенного измерительного блока авторами был создан опытный образец с использованием технологий микроэлектроники, где в качестве гироскопов были применены микромеханические гироскопы (ММГ).
Электромеханические узлы ММГ формируются из неметаллических материалов (монокристаллический кремний, плавленый кварц, карбид кремния и др.) методами фотолитографии и изотропного или анизотропного травления вместе с элементами электроники возбуждения, датчиками съема и преобразования полезного сигнала, элементами формирования обратных связей.
Производство ММГ - крупносерийное, чувствительные элементы создаются («печатаются») на кремниевых пластинах сразу сотнями штук. После разрезания осуществляются индивидуальные операции контроля по параметрам, закрепления в корпусах, приварки электродов, корпусирования, вакуумирования, герметизации корпусов и пр. Технологический процесс включает десятки этапов. К чистоте и точности выполнения предъявляются сверхвысокие требования, значительная часть которых типична для современной микроэлектроники в целом. Производство осуществляется на автоматических линиях, наиболее ответственные операции проводятся в вакууме. Тем не менее, обычно доля бракуемых изделий превышает половину, и это считается нормальным. Хотя к настоящему времени скорость уходов ММГ находится на уровне 10 7 ч, ожидается, что ее можно будет повысить на порядок. Это открывает возможность массового использования ММГ в самых разнообразных областях. Для многих областей технических применений, когда точность практически не имеет значения, решающее значение имеет исключительно низкая стоимость ММГ. Не случайно в паспортных данных ММГ, производимых ведущими фирмами, сведения о скорости уходов вообще не приводятся. По отношению к особенностям технологий массового производства ММГ важнейшим является то, что за счет упругой подвижности инерционного тела при изготовлении чувствительного элемента полностью исключены сборочные операции, которые необходимы только при соединении электродов и корпусировании. (Специальные технологии изготовления прецизионных узлов и элементов гироскопических приборов. Санкт-Петербург Университет ИТМО, 2017)
Таким образом, введение в состав системы восьми гироскопов-акселерометров 8 позволяет не только реализовать полноценную инерциальную систему, в которой при исправной работе всех восьми гироскопов-акселерометров 8 обеспечивается повышение точности вычислений системы координат, а при отказе одного из восьми гироскопов-акселерометров 8 оставшиеся обеспечивают необходимую информацию, достаточную для точного вычисления и поддержания работы инерциальной системы.
Такая конструкция позволяет установить большее количество измерительных устройств и снизить погрешности навигации существенно ниже погрешностей отдельных чувствительных элементов в связи с использованием условного куба 10 и условных тетраэдров 11 для повышения точности определения мест установки восьми гироскопов-акселерометров 8 на сферических поясах 4 и 5. Точность определения навигационных параметров и параметров ориентации повышается за счет уменьшения случайной и систематической составляющих и увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений.
Предлагаемое решение автоматически и непрерывно компенсирует низкочастотные составляющие систематических погрешностей датчиков угловой скорости, что приводит к повышению точности ориентации подвижного объекта, увеличения времени автономной работы и полезного применения, а также снижения энергопотребления.
Использование сферических поясов обеспечивает, при проектировании в реальном использовании заявляемых устройств, практическую возможность надежного крепления блоков измерительных датчиков с обеспечением их позиционной регулировки.
Литература
1. Патент RU №2432548.
2. Патент RU №2162203, МПК G01C 21/00 (2006.01).
Бесплатформенный инерциальный измерительный блок, содержащий гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчик температуры, размещенные на основании, закрепленном на подложке, на которой установлены микросборки сервисной электроники, отличающийся тем, что основание для установки гироскопов-акселерометров выполнено в виде жестко скрепленных между собой перпендикулярно друг другу в двух точках их соприкосновения сферических поясов, на внешней поверхности которых размещены подложки для крепления восьми гироскопов-акселерометров, установленные в точках сопряжения сферических поясов с вершинами внутренних углов условного куба и условных тетраэдров.
Опорно-упорный подшипник скольжения

