Результат интеллектуальной деятельности: АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОЙ МОЙКИ ПОВЕРХНОСТЕЙ
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному и коммунальному машиностроению, в частности к устройствам для автономной влажной уборки полов и других поверхностей помещений агропромышленного, общественного и производственного назначения.
Известно устройство [патент на изобретение KR № 102410452 «Robot Cleaner for Smart Farm and Method for the same» («Робот-пылесос для умной фермы и способ для того же»), 17.06.2022]. Робот-пылесос содержит корпус, трехколесную колесную часть, выполненную в нижней части корпуса для перемещения по проходу внутри животноводческого помещения, основной корпус включает в себя блок привода двигателя для привода колесного блока, модуль проводной/беспроводной связи для связи с внешним терминалом, камеру для получения информации об изображении, контроллер для управления этими компонентами.
Робот-пылесос не обеспечивает качественную влажную очистку сильных загрязнений, в том числе выборочной более качественной очистки особо сильных загрязнений, а также контроля результата очистки в реальном времени. Не предусмотрена мойка других поверхностей (стен, оборудования и др), кроме пола. Ограниченные функциональные возможности обусловлены отсутствием возможности управления положением форсунок для точечной очистки загрязнений на основе анализа информации, поступающей с камеры, а также невозможность автономного перемещения с определением местоположения устройства в пространстве.
Наиболее близким техническим решением к заявленному изобретению является автоматическая машина для уборки пола [патент на изобретение RU № 2 292 835, опубл. 10.02.2007, бюл. №4]. Автоматическая машина содержит раму-основание с приспособлением для перемещения, всасывающее устройство в виде скребка-захвата, рабочий орган, снабженный электроприводом и выполненный в виде цилиндрического барабана с винтообразно закрепленными на нем резиновыми скребками, увлажняющее устройство, устройство для регулирования подачи моющей жидкости, воздуховсасывающий агрегат, корпус, образованный емкостью (баком) для моющей жидкости и емкостью для сбора отработанной жидкости, закрепленными на раме-основании и снабженными разделительными устройствами в виде П-образного профиля с калиброванными отверстиями. Одно из разделительных устройств соединено с выпускным патрубком воздуховсасывающего агрегата, а другое разделительное устройство соединено с выпускным патрубком всасывающего устройства. Кроме этого, приспособление для перемещения рамы-основания выполнено самодвижущимся, а рабочий орган закреплен на дополнительной подвесной раме, соединенной шарнирно с рамой-основанием, и снабжен опорными колесами, регулируемыми по высоте. Известно, что одновременно с началом движения подвесной рамы вниз через электромеханический контакт происходит подключение электрической схемы машины для уборки пола к источнику постоянного тока (аккумуляторной батарее).
Машина обладает большой производительностью и маневренностью. Однако известная машина не может работать полностью автоматически, а работает только в автоматизированном режиме с непосредственным участием оператора, который осуществляет управление машиной в процессе работы, направляет ее и задает команды и режимы уборки. Кроме того, она не обеспечивает направленное воздействие струи на сильные загрязнения.
С существенными признаками изобретения совпадает следующая совокупность признаков наиболее близкого технического решения: рама-основание с закрепленными опорными колесами, аккумуляторные батареи, бак с моющей жидкостью, устройство для регулирования подачи моющей жидкости.
Изобретение направлено на создание автоматического устройства с расширенными функциональными возможностями для избирательной мойки поверхностей.
Это достигается тем, что автоматическое устройство для избирательной мойки поверхностей содержит раму-основание с закрепленными опорными колесами для обеспечения устойчивости, аккумуляторными батареями, баком с моющей жидкостью, устройством для регулирования подачи моющей жидкости. В предложенном решении на раме-основании закреплена вертикальная неподвижная стойка, к которой прикреплена с возможностью вращения вокруг своей оси горизонтальная поворотная штанга с форсунками и установлена система позиционирования струи, включающая стереовидеокамеру, бортовой компьютер, сервоприводы с блоком сервоусилителей, а также две управляемые форсунки с возможностью вращения на угол поворота вокруг оси горизонтальной поворотной штанги и угол поворота вокруг оси, перпендикулярной оси вращения горизонтальной поворотной штанги, при этом углы, зависят от значений координат, зафиксированных стереовидеокамерой.
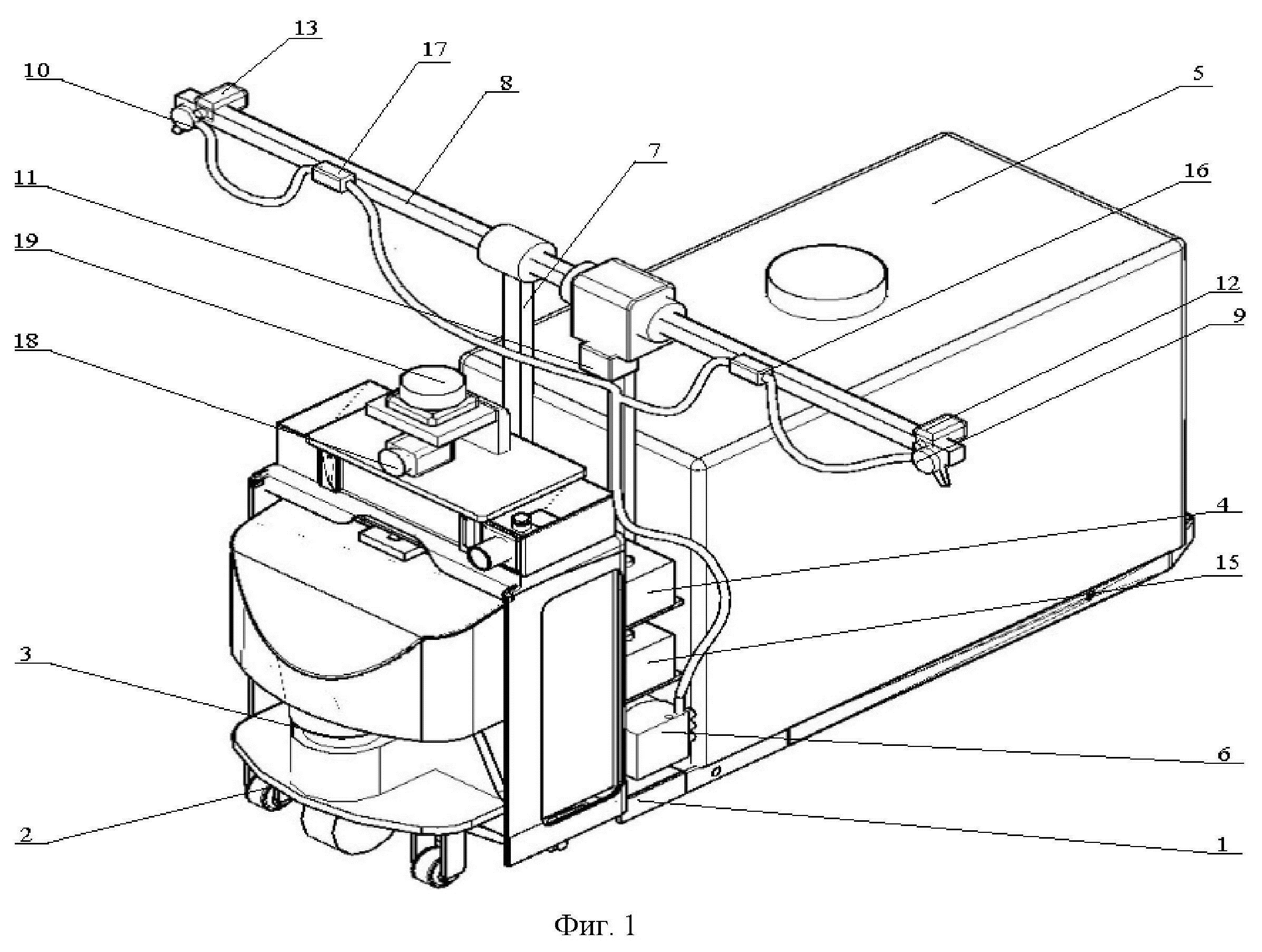
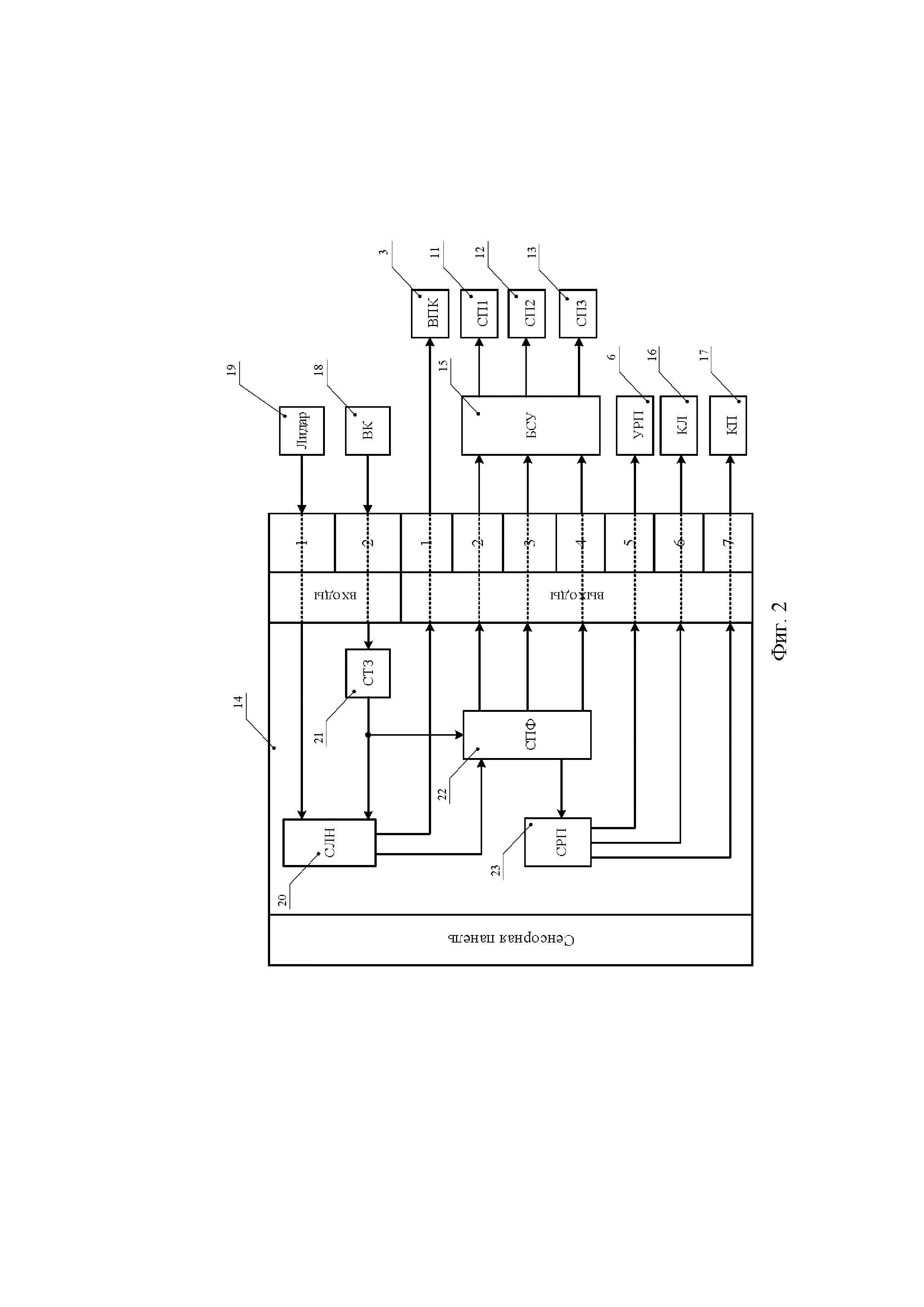
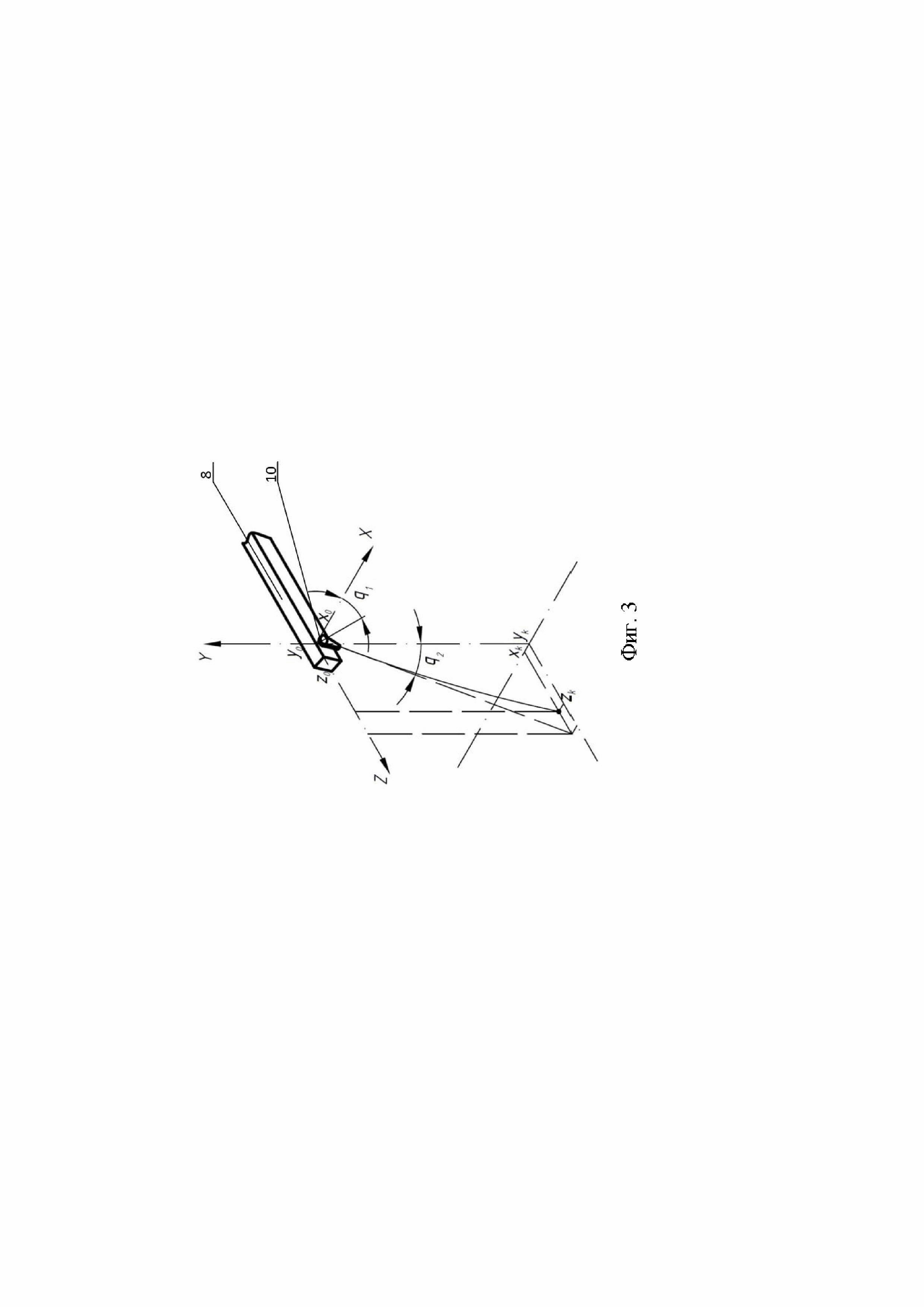
Сущность изобретения поясняется графическим материалом, где на фиг.1 схематично показан общий вид устройства, фиг. 2 – функциональная схема системы управления устройства, фиг. 3 – схема для определения углов поворота форсунок.
Автоматическое устройство для избирательной мойки поверхностей (фиг. 1) содержит раму-основание 1, на которой закреплены опорные колеса 2, например, четыре штуки, для обеспечения устойчивости, ведущее приводное поворотное колесо (ВПК) 3 для перемещения и маневрирования, аккумуляторная батарея 4, бак 5 с моющей жидкостью, устройство 6 для регулирования подачи моющей жидкости (УРП) и вертикальная неподвижная стойка 7. К стойке 7 прикреплена с возможностью вращения вокруг своей оси горизонтальная поворотная штанга 8 с форсункамии 9 и 10 для мойки поверхностей. На стойке 7 ниже штанги 8 закреплен сервопривод 11. На штанге 8 возле форсунок 9 и 10, закреплены сервоприводы 12 и 13, соответственно. Сервоприводы 11, 12, 13 соединены, например, электрически, с бортовым компьютером 14 посредством блока сервоусилителей (БСУ) 15.
Бак 5 соединен с входным патрубком устройства 6 для регулирования подачи моющей жидкости. Выходной патрубок бака 5 гидравлически соединен с расположенными на штанге 8 клапанами 16 и 17 для подачи жидкости через форсунки 9 и 10, соответственно.
В верхней части рамы-основания 1, спереди устройства расположены стереовидеокамера (ВК) 18 для захвата изображения и лидар 19 для ориентации устройства в помещении. Стереовидеокамера 18 и лидар 19 соединены с бортовым компьютером 14.
На раме-основании установлена система позиционирования струи, включающая стереовидеокамеру 18, бортовой компьютер 14, сервоприводы 11, 12, 13 с блоком сервоусилителей 15, а также две управляемые форсунки 9, 10 с возможностью вращения на угол поворота q1 вокруг оси горизонтальной поворотной штанги 8 и угол поворота q2 вокруг оси, перпендикулярной оси вращения горизонтальной поворотной штанги 8. При этом углы q1 и q2, зависят от значений координат, зафиксированных стереовидеокамерой 18.
Бортовой компьютер 14 содержит в своей памяти алгоритмы, реализующие систему локализации и навигации (СЛН) 20, систему технического зрения (СТЗ) 21, систему позиционирования форсунок (СПФ) 22 и систему регулирования подачи (СРП) 23.
Система локализации и навигации (СЛН) 20 связана посредством первого выхода бортового компьютера 14 с ведущим приводным поворотным колесом (ВПК) 3, с помощью которого осуществляется перемещение и маневрирование устройства.
Система позиционирования форсунок (СПФ) 22 связана через второй, третий и четвертый выходы бортового компьютера 14 посредством блока сервоусилителей БСУ (15) с сервоприводом (СП1) 11 для вращения горизонтальной штанги 8 и двумя сервоприводами (СП2,СП3) 12, 13 для вращения форсунок 9, 10 вокруг оси, перпендикулярной оси горизонтальной штанги 8, соответственно.
Система регулирования подачи жидкости (СРП) 23 связана через пятый выход бортового компьютера 14 с устройством для регулирования подачи моющей жидкости (УРП) 6, через шестой выход с клапаном (КЛ, КП) 16, 17 подачи моющей жидкости на форсунку 9, 10 соответственно.
Устройство работает следующим образом.
Устройство подключается к электросети для зарядки аккумуляторных батарей 4. Перед началом работы осуществляется загрузка карты с заданной траекторией движения посредством взаимодействия оператора с сенсорной панелью бортового компьютера 14.
Производится заправка водой бака с моющей жидкостью 5 (до полного ее заполнения). При помощи встроенной панели включается режим «Удаление загрязнений». Устройство начинает движение по заданным на карте помещения траекториям из текущей точки. Для этого на основе информации с лидара 19 и стереовидеокамеры (СВК) 18, поступающей в систему локализации и навигации СЛН (20) с применением известного метода одновременной локализации и картографирования (SLAM) формируются управляющие сигналы, подаваемые на ведущее приводное поворотное колесо (ВПК) 3, осуществляющее перемещение и маневрирование в соответствии с заданной траекторией рамы-основания 1, боковую устойчивость которой обеспечивают вспомогательные колеса 2. Система технического зрения (СТЗ) 21 содержит предварительно обученную нейронную сеть, настроенную на поиск определенных загрязнений на поверхностях путем получения моментального изображения с стереовидеокамеры (СВК) 18, анализа полученных данных с выявлением расположения загрязнения на поверхности и определения его координат (x, y, z) относительно центра горизонтальной поворотной штанги 8 устройства. После нахождения загрязнений осуществляется остановка устройства путем подачи сигнала на ведущее приводное поворотное колесо 3. На основе рассчитанных координат загрязнения в системе позиционирования форсунок (СПФ) 22 осуществляется выбор ближайшей форсунки 9, 10 для выполнения операции точечной очистки загрязнения компактной ламинарной струей и соответствующего клапана 16, 17 для направления потока жидкости в выбранную форсунку. В системе позиционирования форсунок (СПФ) 22 по зафиксированным при помощи стереовидеокамеры (СВК) 18 значениям координат (xk, yk, zk) и с помощью выведенной системы нелинейных уравнений:


где х0, y0, z0 – координаты форсунки, хk, yk, zk – координаты загрязнения, V0=QT·µ/S –  скорость потока, S – площадь отверстия форсунки,
скорость потока, S – площадь отверстия форсунки,
QT – теоретический объемный расход, µ=Q/QТ – коэффициент расхода,
g – ускорение свободного падения, Q – фактический объемный расход, при помощи численных методов решения системы нелинейных алгебраических уравнений, например метода Ньютона рассчитываются углы вращения выбранной форсунки: угол поворота горизонтальной поворотной штанги 8 вокруг своей оси q1 и угол поворота q2 форсунки вокруг оси перпендикулярной оси вращения горизонтальной поворотной штанги 8.
После завершения позиционирования форсунок с системы позиционирования форсунок (СПФ) 22 номер выбранной форсунки поступает в систему регулирования подачи жидкости (СРП) 23, которая подает сигнал включения на устройство регулирования подачи моющей жидкости (УРП) 6 и сигнал открытия соответствующего клапана КЛ 16 или КП 17. Моющая жидкость по трубкам, закрепленным на неподвижной стойке 7, и поворотной штанге 8 из бака 5 посредством устройства регулирования подачи моющей жидкости (УРП) 6 подается с высоким давлением на форсунки 9, 10, в которых формируется компактная ламинарная струя, осуществляющая точечную очистку загрязнения.
После завершения цикла очистки загрязнения система регулирования подачи (СРП) 23 отключает устройство регулирования подачи моющей жидкости (УРП) 6 и закрывает клапаны 16, 17. Далее процесс поиска загрязнений и его обработки повторяется, до тех пор, пока в зоне видимости стереовидеокамеры (ВК) 18 все загрязнения не будут обработаны. После этого возобновляется следование устройства по заданной в бортовом компьютере 14 траектории до момента детектирования новых загрязнений. После прохождения всей заданной траектории устройство завершает процесс мойки или циклично повторяет проход по заданной траектории.
На функциональном уровне (см. фиг.2) сигнал с стереовидеокамеры (ВК) 18 поступает на вход программного модуля системы технического зрения (СТЗ) 21, выходные данные с которого поступают на вход системы позиционирования форсунок (СПФ) 22 и системы локализации и навигации (СЛН) 20, в которую также поступает сигнал с лидара 19. В систему позиционирования форсунок (СПФ) 22 поступают выходные данные из системы локализации и навигации (СЛН) 20 о текущем положении и ориентации устройства. В систему регулирования подачи жидкости (СРП) 23 из системы позиционирования форсунок (СПФ) 22 поступает выходной сигнал, содержащий номер выбранной форсунки по завершению процесса позиционирования форсунки.
Изобретение позволяет создать автоматическое устройство с расширенными функциональными возможностями для избирательной мойки поверхностей, обладающее высоким качеством очистки поверхностей, повышенной маневренностью, а также возможностью выполнения избирательной очистки от загрязнений стен, ограждений, оборудования и др. поверхностей.
Автоматическое устройство для избирательной мойки поверхностей,содержащее раму-основание с закрепленными опорными колесами для обеспечения устойчивости, аккумуляторными батареями, баком с моющей жидкостью, устройством для регулирования подачи моющей жидкости, отличающееся тем, что на раме-основании закреплена вертикальная неподвижная стойка, к которой прикреплена с возможностью вращения вокруг своей оси горизонтальная поворотная штанга с форсунками и установлена система позиционирования струи, включающая стереовидеокамеру, бортовой компьютер, сервоприводы с блоком сервоусилителей, а также две управляемые форсунки с возможностью вращения на угол поворотавокруг оси горизонтальной поворотной штанги и угол поворотавокруг оси, перпендикулярной оси вращения горизонтальной поворотной штанги, при этом углы зависят от значений координат, зафиксированных стереовидеокамерой.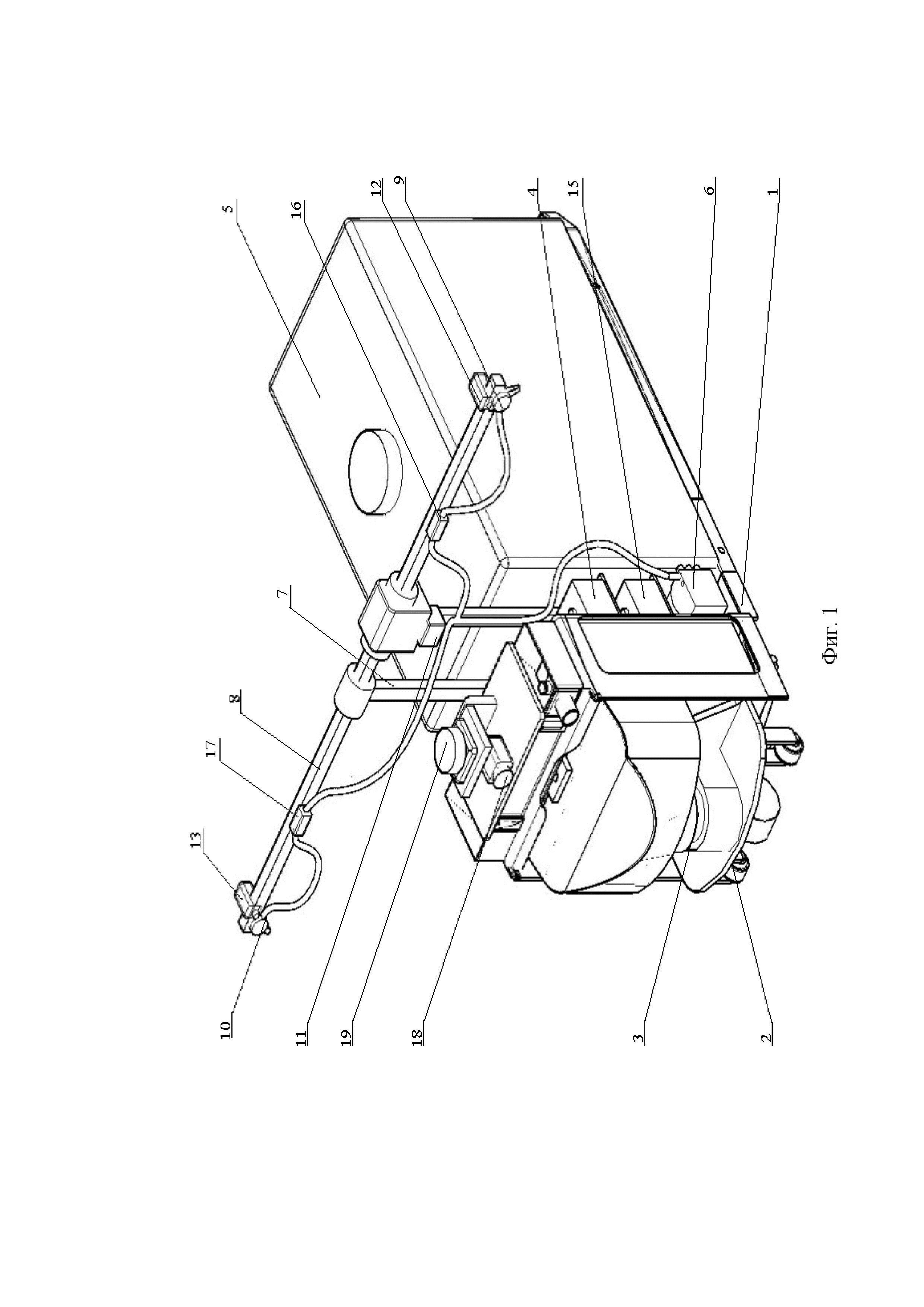
Дезинтегратор
Сырьевая смесь для прессованных гипсовых изделий и способ их изготовления
Сырьевая смесь для прессованных гипсовых изделий и способ их изготовления
Центробежный дисковый измельчитель
Гранулированный заполнитель для бетонной смеси, состав бетонной смеси для получения бетонных строительных изделий, бетонное строительное изделие
Сырьевая смесь для геополимерного пенобетона и способ ее получения
Сырьевая смесь для геополимерного пенобетона и способ ее получения
Теплоизоляционный материал на основе наполненного пенополиуретана
Помольно-смесительный агрегат с автоматической балансировкой
Способ производства прямошовных магистральных труб
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Устройство для трехмерной печати зданий и архитектурно-строительных модулей

