Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
Вид РИД
Изобретение
Изобретение относится к робототехнике, а в частности к способу управления одним или несколькими манипуляторами, которые работают в одной области пространства, и может быть использовано в технологическом процессе производства при выполнении манипуляторами различных работ.
Известен способ управления манипулятором [SU 639698 A1, 30.12.1978], заключающийся в том, что с помощью программного устройства формируется закон управления движением приводов и воспроизводится с помощью следящих систем, с целью обеспечения перемещения одного предмета несколькими манипуляторами одновременно. При этом контролируют величину моментов сопротивлений в шарнирах манипулятора и переключают программное устройство на режим компенсации сопротивлений в приводах в том случае, если они оказываются выше допустимых.
Недостатком способа является возможное столкновение двух роботов-манипуляторов, работающих в одной зоне, что может привести к их разрушению и нарушению технологического процесса производства.
Известен способ управления манипулятором [RU 2761923 C1, 14.12.2021], имеющий две системы технического зрения, две навигационные системы, которые оснащены гироскопами, и датчики положения. Для получения точной информации о расположении рабочих органов и объектов, с которыми взаимодействует манипулятор, в способе применяется пересчет координат из второй в первую систему координат. Таким образом осуществляется вычисление реальных координат объекта, с которым манипулятор в дальнейшем производит необходимые манипуляции.
Недостатком способа является появление такой ситуации, при которой объект, с которым предстоит взаимодействие, не виден первой и второй системе технического зрения, поскольку находится вне их предела досягаемости.
Известен способ управления по меньшей мере двумя роботами, имеющими соответствующие рабочие пространства, включающие в себя по меньшей мере одну общую область [RU 2593816 C2, 10.08.2016] и для осуществления имеющий центральный блок управления роботами. Способ заключается в том, что у каждого робота имеются запрещенные, отслеживаемые и смешанные области контакта, причем рабочее пространство каждого робота моделируют, принимая во внимание объекты, присутствовавшие в рабочем пространстве робота. Способ осуществляется путем отправки сигналов центральному блоку управления роботом, когда он собирается войти в смешанную область и второй выходной сигнал, когда он непосредственно входит в смешанную область. При этом статус каждой смешанной области изменяется динамически для каждого робота во время функционирования робота посредством отправки с центрального блока управления входного сигнала роботу, который представляет смешанную область запрещенной или отслеживаемой для упомянутого робота, в зависимости от того, свободна ли упомянутая смешанная область или нет от других объектов.
Недостатком известного способа является необходимость моделирования рабочего пространства каждого робота с учетом присутствующих в зоне досягаемости объектов, а также невозможность работы одного робота в той зоне, где уже работает другой робот. Это накладывает ограничения на применимость к тем технологическим процессам, где требуется совместная работа манипуляторов в одной области и имеется динамика изменения пространства вокруг роботов. Также недостатком является возможное накапливание ошибки позиционирования, что в прототипе не компенсируется и может привести к разрушению роботов.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ управления манипулятором, в рабочей зоне которого расположены другие манипуляторы и физические объекты, с которыми они взаимодействуют [CN 107921642 A, 17.04.2018]. Способ включает формирование сигналов заданного перемещения манипулятора посредством блока управления манипулятором, которые отрабатывают исполнительными механизмами звеньев манипулятора, при этом с помощью фотокамер, установленных на звеньях манипулятора, осуществляют фотофиксацию окружающего пространства, полученные фотоизображения передают через блок управления на персональный компьютер, в котором по встроенным в него алгоритмам производят идентификацию окружающего пространства с определением расстояния от звеньев манипулятора до ближайшего объекта или другого манипулятора, причем при невозможности беспрепятственного перемещения манипулятор останавливают и включают режим ожидания, после чего осуществляют корректировку начальной траектории движения манипулятора с обеспечением беспрепятственного перемещения в заданные координаты положения, новую траекторию беспрепятственного движения преобразуют в набор команд управления, поступающих в блок управления манипулятором, выводят манипулятор из режима ожидания и осуществляют его движение по новой траектории. Данный способ принят за прототип.
Недостатком прототипа является отсутствие возможности фотофиксации всего окружающего пространства, так как фотокамеры располагаются на звеньях манипулятора статичным образом. В результате появляется высокая вероятность столкновения с окружающими физическими объектами вокруг манипулятора, что может привести к разрушению звеньев манипулятора и нарушению технологического процесса, который он исполняет.
Задачей настоящего изобретения является устранение недостатка прототипа, а в частности, обеспечение возможности фотофиксации всего окружающего пространства.
Решение этой задачи является актуальным в связи с увеличением спроса на автоматизацию и роботизацию производства, при котором главным критерием выступает обеспечение безопасности использования технических средств.
Поставленная задача была решена за счет того, что в известном способе управления манипулятором, в рабочей зоне которого расположены другие манипуляторы и физические объекты, с которыми они взаимодействуют, включающий формирование сигналов заданного перемещения манипулятора посредством блока управления манипулятором, которые отрабатывают исполнительными механизмами звеньев манипулятора, при этом с помощью фотокамер, установленных на звеньях манипулятора, осуществляют фотофиксацию окружающего пространства, полученные фотоизображения передают через блок управления на персональный компьютер, в котором по встроенным в него алгоритмам производят идентификацию окружающего пространства с определением расстояния от звеньев манипулятора до ближайшего объекта или другого манипулятора, причем при невозможности беспрепятственного перемещения манипулятор останавливают и включают режим ожидания, после чего осуществляют корректировку начальной траектории движения манипулятора с обеспечением беспрепятственного перемещения в заданные координаты положения, новую траекторию беспрепятственного движения преобразуют в набор команд управления, поступающих в блок управления манипулятором, выводят манипулятор из режима ожидания и осуществляют его движение по новой траектории, согласно изобретению каждое звено манипулятора снабжают поворотным механизмом, а упомянутые фотокамеры размещают на поворотных механизмах на поворотных механизмах с возможностью вращения вокруг звена манипулятора из одного крайнего углового положения в другое крайнее угловое положение с обеспечением угла охвата не менее 180 градусов и перемещения вдоль него с помощью соответствующих двигателей, причем при движении звена манипулятора в заданном направлении для упомянутой фотофиксации разворачивают фотокамеру этого звена по направлению движения и перемещают ее вдоль этого звена от одного крайнего положения к другому с частотой, достаточной для идентификации окружающего пространства и обнаружения объектов, препятствующих движению этого звена, при этом в упомянутом режиме ожидания осуществляют сканирование всего окружающего пространства посредством всех фотокамер, которыми оснащен манипулятор.
На фигуре схематически изображена ячейка с двумя манипуляторами. На фигуре введены следующие обозначения:
1 - Манипулятор №1
2 - Манипулятор №2
3 - Поворотный механизм на звене манипулятора
4 - Фотокамера
5 - Физический объект
6 - Область досягаемости манипуляторов
7 - Блок управления манипуляторами
8 - Персональный компьютер
a - Угол обзора фотокамеры.
Предлагаемый способ осуществляется в следующей последовательности.
Манипулятор 1 располагают в одной области пространства с другими манипуляторами 2 и физическими объектами 5, с которыми он взаимодействует (фиг.). Для управления манипуляторами 1, 2 используют блок управления манипуляторами 7, подсоединенный к персональному компьютеру 8. В персональный компьютер 8 встроены алгоритмы, формирующие команды для управления исполнительными механизмами манипуляторов 1, 2, на каждом звене которых имеется поворотный механизм 3. Один из двигателей поворотного механизма 3 вращает установленную на нем фотокамеру 4, вдоль звена манипулятора, а второй вращает эту же фотокамеру 4 вокруг звена манипулятора из одного крайнего положения в другое крайнее угловое положение с обеспечением угла охвата не менее 180 градусов.
При движении звена манипулятора в заданном направлении фотокамеру 4 этого звена разворачивают по направлению движения и перемещают ее вдоль этого звена от одного крайнего положения к другому с частотой, достаточной для идентификации окружающего пространства и обнаружения объектов, препятствующих движению этого звена, и производят фотофиксацию. Фотоизображения пересылают на блок управления 7, а с него передают на персональный компьютер 8, на вход алгоритмам, производящих идентификацию окружающего пространства с определением расстояния от звена манипулятора, от которого получена серия изображений до ближайшего объекта.
После этого производят корректировку изначальной траектории движения при возможности построить ее таким образом, при которой все звенья манипулятора смогут беспрепятственно переместиться в заданные координаты, а при невозможности манипулятор останавливают и включают режим ожидания. В режиме ожидания осуществляют сканирование всего пространства путем его фотофиксации со всех камер, которыми оснащен манипулятор, и как только вычисляется новая траектория беспрепятственного движения, манипулятор выходит из режима ожидания и начинается движение по новой траектории, которая вычисляется алгоритмами в персональном компьютере 8, и которые преобразуют ее в набор команд управления, которые поступают в блок управления манипуляторами 7.
Таким образом, заявляемый способ, используя манипуляторы, поворотные механизмы, фотокамеры, блок управления, персональный компьютер и основанный на фотофиксации окружающего пространства с последующим вычислением расстояний до препятствий и специальными алгоритмами, корректирующими движение звеньев манипулятора, позволяет работать в одной области пространства двум и более манипуляторам с любыми окружающими их физическими объектами, обеспечивая безопасность движения звеньев манипулятора.
Способ управления манипулятором, в рабочей зоне которого расположены другие манипуляторы и физические объекты, с которыми они взаимодействуют, включающий формирование сигналов заданного перемещения манипулятора посредством блока управления манипулятором, которые отрабатывают исполнительными механизмами звеньев манипулятора, при этом с помощью фотокамер, установленных на звеньях манипулятора, осуществляют фотофиксацию окружающего пространства, полученные фотоизображения передают через блок управления на персональный компьютер, в котором по встроенным в него алгоритмам производят идентификацию окружающего пространства с определением расстояния от звеньев манипулятора до ближайшего объекта или другого манипулятора, причем при невозможности беспрепятственного перемещения манипулятор останавливают и включают режим ожидания, после чего осуществляют корректировку начальной траектории движения манипулятора с обеспечением беспрепятственного перемещения в заданные координаты положения, новую траекторию беспрепятственного движения преобразуют в набор команд управления, поступающих в блок управления манипулятором, выводят манипулятор из режима ожидания и осуществляют его движение по новой траектории, отличающийся тем, что каждое звено манипулятора снабжают поворотным механизмом, а упомянутые фотокамеры размещают на поворотных механизмах с возможностью вращения вокруг звена манипулятора из одного крайнего углового положения в другое крайнее угловое положение с обеспечением угла охвата не менее 180 градусов и перемещения вдоль него с помощью соответствующих двигателей, причем при движении звена манипулятора в заданном направлении для упомянутой фотофиксации разворачивают фотокамеру этого звена по направлению движения и перемещают ее вдоль этого звена от одного крайнего положения к другому с частотой, достаточной для идентификации окружающего пространства и обнаружения объектов, препятствующих движению этого звена, при этом в упомянутом режиме ожидания осуществляют сканирование всего окружающего пространства посредством всех фотокамер, которыми оснащен манипулятор.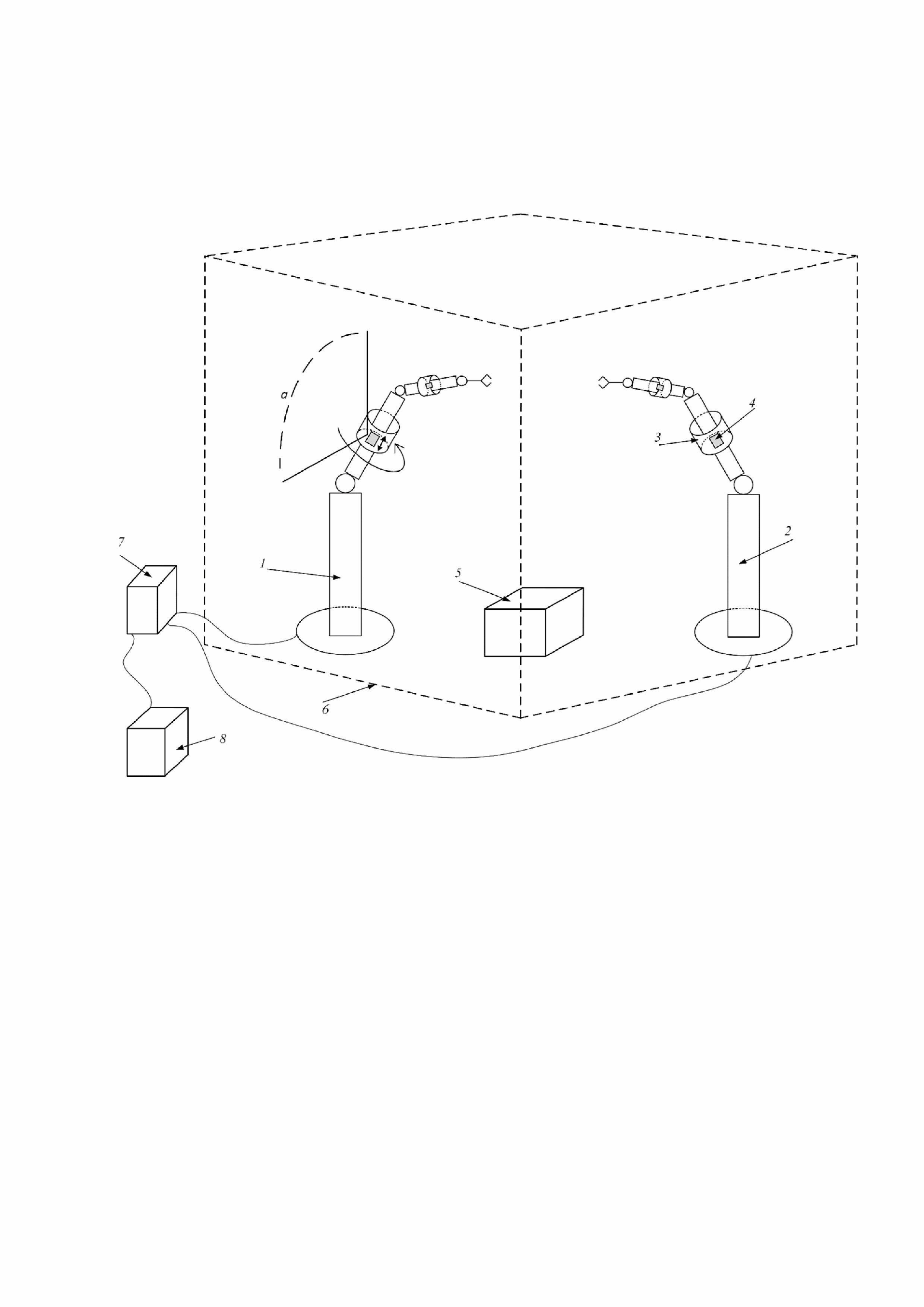
Способ электроэрозионной проволочной вырезной обработки
Способ прогнозирования дебита скважин с учетом анизотропии проницаемости карбонатных горных пород
Способ прогнозирования пространственной ориентации трещин гидравлического разрыва пласта
Способ определения дисперсности водонефтяной эмульсии
Способ автоматической калибровки платформы 3d-принтера

