Результат интеллектуальной деятельности: Мобильный робот для побелки стволов деревьев
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному машиностроению, а именно к роботизированным техническим средствам для добеливания стволов деревьев преимущественно в плодово-фруктовых садах.
Известен самоходный робот-опрыскиватель для обработки растений земляники и других низкорастущих культур, включающий раму, управляемые колеса, по крайней мере два из которых снабжены электромоторами, систему управления и навигации с контрольно-измерительными приборами, систему питания, систему опрыскивания, содержащую емкость для рабочего раствора и штанги, отличающийся тем, что штанга снабжена универсальными датчиками высоты и наличия растений, а также электрическим цилиндром, выполненным с возможностью регулировки высоты расположения штанги в зависимости от высоты культурных растений, и четырьмя распыливающими узлами, при этом каждый узел выполнен в виде трех форсунок, размещенных в защитном кожухе (Патент РФ №2592904, опубл. 2016).
К недостаткам известных технических решений следует отнести недостаточные функциональные возможности распыливающих узлов.
За прототип выбран мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы с двумя направляющими передними и двумя ведущими задними колесами, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи с множеством объединенных фотоэлементов, систему управления и навигации в виде бортового компьютера, модуля интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули пенообразования и внесения пестицидов, отличающийся тем, что панель солнечной батареи выполнена в виде половины поверхности сплюснутого сфероида вращения, одна из больших осей которого лежит в одной вертикальной плоскости с продольной осью симметрии робота-опрыскивателя, а малая ось совпадает с вертикальной осью, проходящей через центр масс робота-опрыскивателя, на которой сверху панели установлены антенна приемника спутниковой навигационной системы, снизу, под рамой - блок инерциальной навигационной системы, блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха с одной стороны связан интерфейсом с центральным процессором бортового компьютера, с другой стороны - гидравлическими и пневматическими коммуникациями соединен с модулями пенообразования и внесения пестицидов, а каждый модуль пенообразования и внесения пестицидов снабжен, по крайней мере, тремя пеногенераторами, два из которых расположены горизонтально с общей горизонтальной осью симметрии и выходными отверстиями, направленными навстречу друг другу, а один расположен вертикально, с осью симметрии, перпендикулярной горизонтальной оси, и выходным отверстием, направленным вниз, при этом каждый из модулей пенообразования и внесения пестицидов и каждый цифровой оптико-электронный датчик снабжены автономными приводными механизмами с электрошаговыми двигателями для поступательного перемещения модулей и датчиков вдоль горизонтальных штанг, а продольные оси симметрии цифровых оптико-электронных датчиков и продольные оси симметрии модулей пенообразования и внесения пестицидов постоянно находятся в одной вертикальной плоскости, перпендикулярной осям симметрии задней горизонтальной штанги и осям симметрии фронтальной горизонтальной штанги (патент РФ №2731082 С1, опубл. 2020).
Технический недостаток мобильного робота-опрыскивателя для обработки пестицидами пропашных овощных и низкорастущих ягодных культур следует отнести отсутствие возможности системы пенообразования и внесения пестицидов обрабатывать растения вокруг ствола по высоте в вертикальной плоскости.
Технический результат - обработка ствола дерева побелкой по кругу в вертикальной плоскости, повышение производительности выполнения технологического процесса.
Указанный технический результат достигается мобильным роботом для побелки стволов деревьев, содержащим самодвижущееся четырехколесное шасси в виде горизонтальной рамы с двумя направляющими передними и двумя ведущими задними колесами, систему автономного электропитания в виде блока бортовых аккумуляторных батарей, систему управления и навигации в виде бортового компьютера, блок управления электроприводами шасси, модуля интегрированной навигационной системы, систему технического зрения, включающую установленные на раме трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему распыления, включающую блок автоматического управления подачей, расходом и распределением рабочего раствора, бак, насосный агрегат, согласно изобретению дополнительно содержит защитный экран, ведомое колесо, подшипник скольжения, электропривод с ведущей шестерней, подшипники качения, шарнирные узлы вращения и четыре тяги с магнитными датчиками, при этом защитный экран и бак жестко крепятся снизу к ведомому колесу, которое опирается на подшипник скольжения и приводится в движение с помощью электропривода с ведущей шестерней, при этом сверху в нижней части рамы с двух сторон по контору защитного экрана крепятся подшипники качения и обеспечивают свободное перемещение защитного экрана между этими подшипниками, при этом спереди и сзади рамы шарнирно устанавливаются тяги с магнитными датчиками расположенные симметрично относительно друг друга на одной оси.
Изобретение поясняется чертежами.
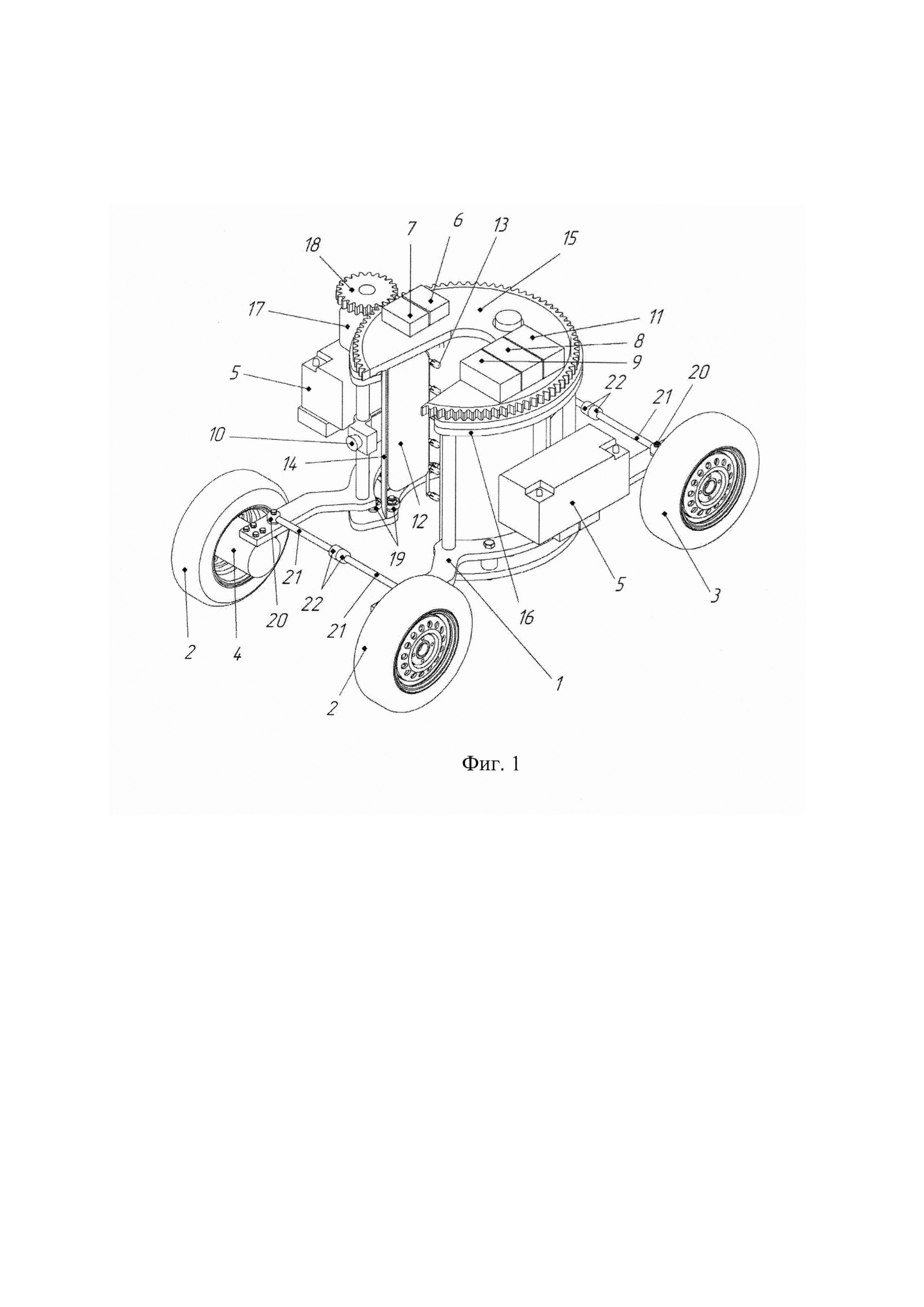
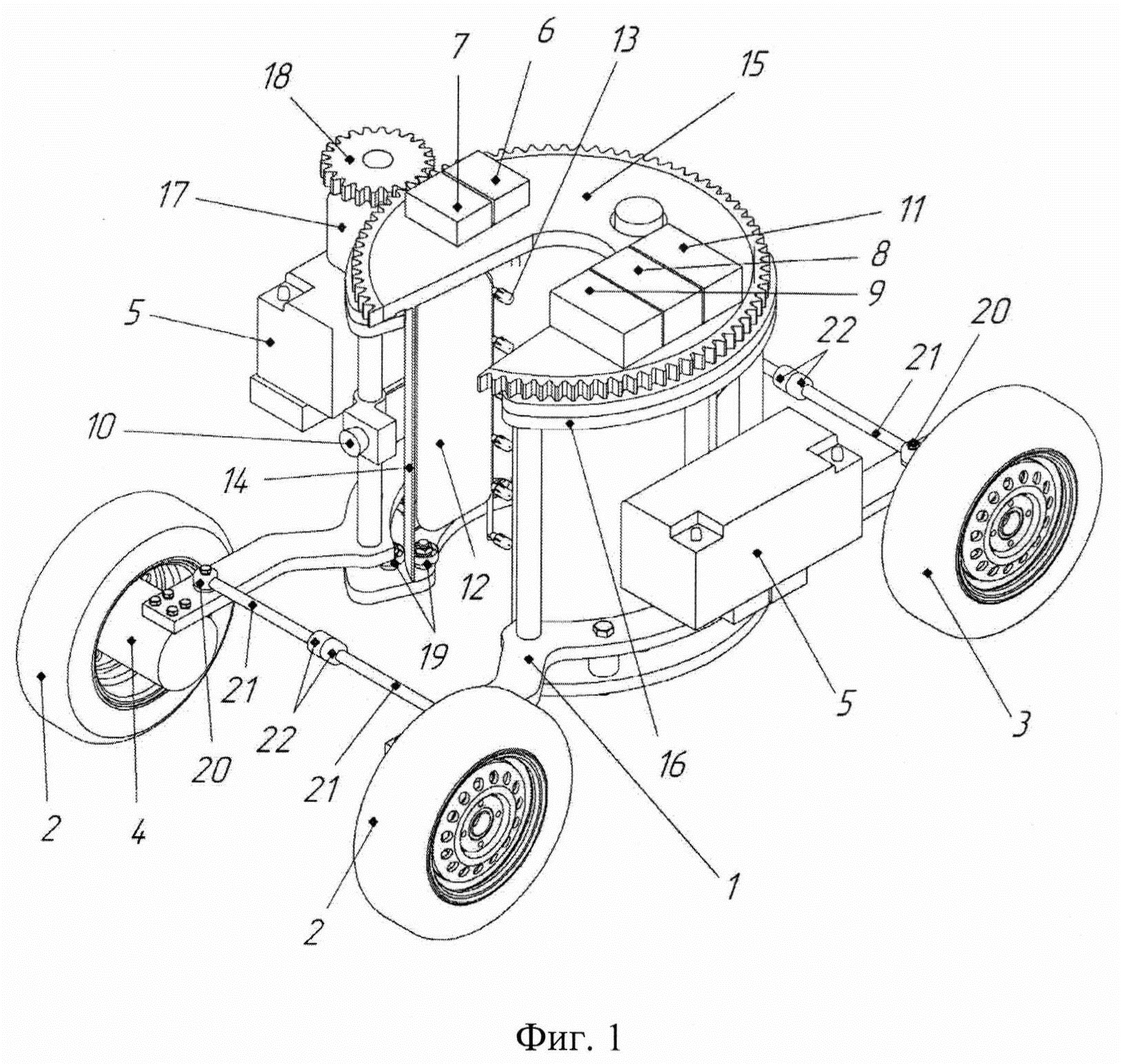
На фиг. 1 изображен вид общий.
На фиг. 2 - вид сверху.
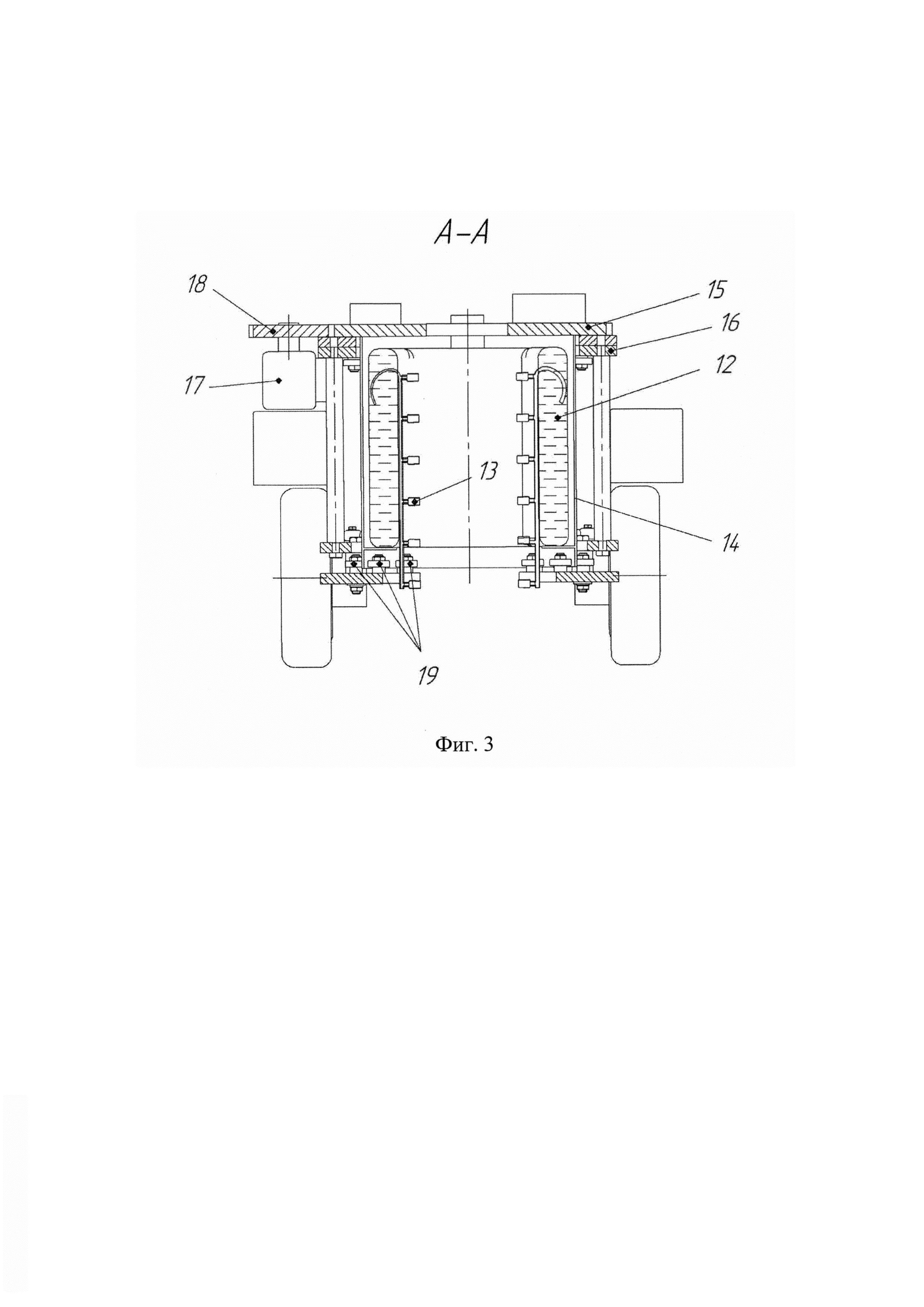
На фиг. 3 - сечение А-А.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Мобильный робот для побелки стволов деревьев содержит самодвижущееся четырехколесное шасси, систему автономного электропитания, систему управления и навигации, систему технического зрения и систему распыления.
Самодвижущееся четырехколесное шасси выполнено в виде горизонтальной прямоугольной рамы 1 с двумя передними направляющими колесами 2, двумя задними ведущими колесами 3 с приводными электромоторами 4, установленные на раме 1.
Система автономного электропитания включает на раме 1 установленный с двух сторон блок бортовых аккумуляторных батарей 5. Система автономного питания комплексирована с системой управления и навигации.
Система управления и навигации включает: модуль программного управления работой бортового оборудования и программного движения робота по заданной траектории, содержащий бортовой компьютер 6 и связанный с ним блок управления 7 электроприводами шасси, модуль интегрированной навигационной системы для определения координат и направления движения, состоящий из закрепленного на раме 1 блока инерциальной навигационной системы 8 в виде цифровых инерциальных датчиков (гироскопов, акселерометров), объединенного с блоком спутниковой навигационной системы в виде приемника ГЛОНАСС/GPS 9.
Система технического зрения включает трехмерный сканирующий лазерный оптический дальномер 10 в виде лазерного передатчика и электрооптического приемника для пространственной ориентации робота, комплексированный с модулем интегрированной навигационной системы.
Система распыления включает: установленные на раме 1 блок 11 автоматического управления подачей, расходом и распределением рабочей жидкости, дозирующего и распределяющего гидравлического оборудования и насосный агрегат (не показано), бак 12 и две рампы распыления с форсунками 13. Бак 12 имеет форму, выполненную по кругу усеченной окружности. С внутренней стороны на боковой поверхности бака 12 вертикально крепятся две рампы распыления с форсунками 13 расположенные симметрично относительно оси бака.
На раме 1 с наружной стороны вокруг бака 12 устанавливается защитный экран 14, который вместе с баком 12 жестко крепятся снизу к ведомому колесу 15. Ведомое колесо 15 опирается на подшипник скольжения 16 и приводится в движение с помощью электропривода 17 с ведущей шестерней 18. На раме 1 сверху на нижней части с двух сторон по контору защитного экрана 14 крепятся подшипники качения 19 и обеспечивают свободное перемещение защитного экрана между подшипниками качения 19.
Для обхода препятствия (ствола) спереди и сзади рамы 1 шарнирными узлами вращения 20 крепятся тяги 21 с магнитными датчиками 22, которые располагаются симметрично относительно друг друга на одной оси.
Работа мобильного робота для побелки стволов деревьев осуществляется следующим образом.
Перед началом работы, бортовой компьютер 6 получает задание на выполнение технологического процесса, в котором прописываются параметры обрабатываемого участка - длина гона, ширина междурядья, схема обработки участка, норма расхода и распределение рабочей жидкости. В бак 12 заливается готовый перемешанный раствор побелки. Включается в работу система автономного электропитания от блока бортовых аккумуляторных батарей 5, электропитание подается к системе управления и навигации, системе технического зрения, системе распыления. Включается система управления и навигации, система технического зрения. В соответствии с заданием технологического процесса от получаемых GPS/ГЛОНАСС приемника 9 определяются начальные координаты и по сигналу от компьютера 6 через блок управления 7 электроприводом шасси включаются приводные электромоторы 4. Мобильный робот начинает движение и перемещается на начало ряда деревьев обрабатываемого участка. Система технического зрения посредством сканирующего лазерного оптического дальномера 10 осуществляет наблюдение за пространством и обнаруживает стволы деревьев. Мобильный робот движется к первому дереву до тех пор, пока ствол не окажется рядом с тягами 21 спереди рамы 1, и по сигналу компьютера 6 магнитные датчики 22 отключаются. При дальнейшем движении мобильного робота, ствол, упираясь в тяги 21, поворачивает их относительно шарнирных узлов вращения 20, обходя вокруг себя. После того как ствол окажется за тягами 21, магнитные датчики 22 включаются и тяги 21 перемещаются в первоначальное положение замыкая спереди раму 1. Мобильный робот продолжает движение пока ствол не окажется в прорези центра окружности ведомого колеса 15 и останавливается. По сигналу компьютера 6 включается электропривод 17, и ведущая шестерня 18, находясь в контакте с ведомым колесом 15, начинает его вращать. Одновременно с электроприводом 17 включается система распыления. Посредством блока 11 автоматического управления и дозирующего, распределяющего гидравлического оборудования с насосным агрегатом (не показано), раствор побелки из бака 12 подается через две рампы распыления с форсунками 13 на ствол дерева. Ведомое колесо 15, опираясь на подшипник скольжения 16, вращает вместе с собой бак 12 и защитный экран 14, который свободно перемещается между подшипниками качения 19 установленные по контору защитного экрана 14. Как только ведомое колесо 15 сделает поворот на 180 градусов, электропривод 17 и система распыления выключаются. Мобильный робот продолжает движение, как только ствол выйдет из прорези окружности ведомого колеса 15, включатся электропривод 17 в обратную сторону, и ведомое колесо 15 возвращается в исходное положение. Далее ствол проходит через тяги 21 в задней части рамы 1 аналогично, как и в передней части рамы 1. Обработка побелкой следующих стволов деревьев выполняется по заданной схеме обработки поля по такому же циклу.
Таким образом, мобильный робот выполняет обработку ствола дерева побелкой по кругу в вертикальной плоскости в автоматизированном режиме, повышая производительность выполнения технологического процесса.
Мобильный робот для побелки стволов деревьев, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы с двумя направляющими передними и двумя ведущими задними колесами, систему автономного электропитания в виде блока бортовых аккумуляторных батарей, систему управления и навигации в виде бортового компьютера, блок управления электроприводами шасси, модуля интегрированной навигационной системы, систему технического зрения, включающую установленные на раме трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему распыления, включающую блок автоматического управления подачей, расходом и распределением рабочего раствора, бак, насосный агрегат, отличающийся тем, что дополнительно содержит защитный экран, ведомое колесо, подшипник скольжения, электропривод с ведущей шестерней, подшипники качения, шарнирные узлы вращения и четыре тяги с магнитными датчиками, при этом защитный экран и бак жестко крепятся снизу к ведомому колесу, которое опирается на подшипник скольжения и приводится в движение с помощью электропривода с ведущей шестерней, при этом сверху в нижней части рамы с двух сторон по контору защитного экрана крепятся подшипники качения и обеспечивают свободное перемещение защитного экрана между этими подшипниками, при этом спереди и сзади рамы шарнирно устанавливаются тяги с магнитными датчиками, расположенные симметрично относительно друг друга на одной оси.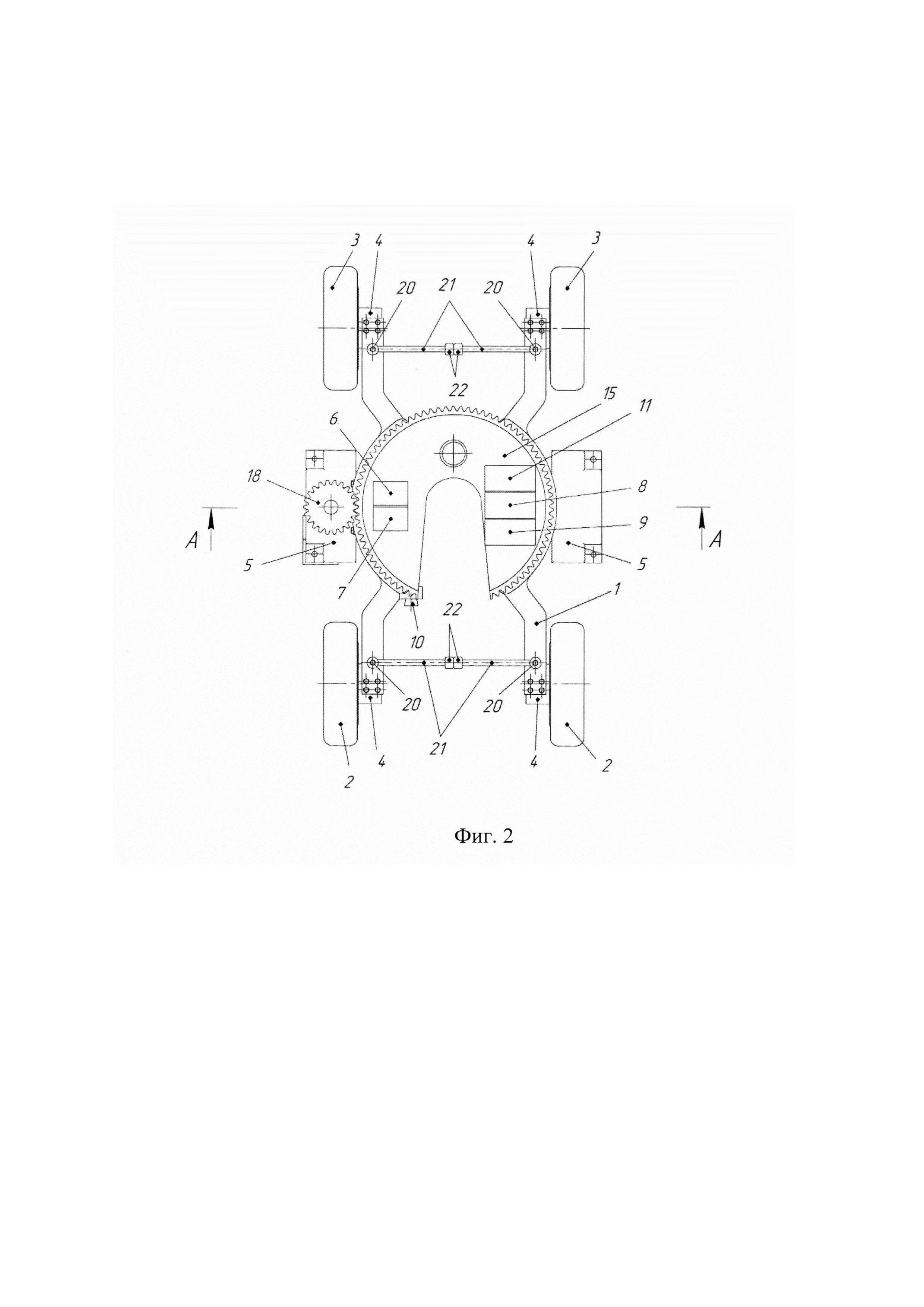
Орудие для внутрипочвенного внесения удобрений и мелиорантов
Комбайн корнеклубнеуборочный
Способ кормления хряков-производителей
Мелиоративный глубокорыхлитель-удобритель
Устройство для измерения усилий на рабочий орган сельскохозяйственных машин, преимущественно в почвенном канале
Корм продукционный для форели
Орудие для глубокой обработки почвы
Способ синхронизации половой охоты у высокопродуктивных коров
Устройство для получения воды из атмосферного воздуха и выработки электроэнергии
Комбинированная фасадная теплоизоляционная конструкция
Способ нанесения керамического покрытия на детали из чугунов и сталей
Способ и установка термической обработки рельсов
Способ и установка термической обработки рельсов
Стенд для испытания гидроподъемников
Муфта свободного хода
Способ автоматической диагностики системы с электроприводом
Аварийно-спасательная машина
Способ получения порошков тантала
Устройство и способ низкотемпературной подготовки газа
Устройство контроля расхода и равномерности распределения жидкости по каналам многоканальной гидравлической системы

