Результат интеллектуальной деятельности: Система управления приводами антенны станции наведения
Вид РИД
Изобретение
Система управления относится к системам управления приводами антенн и предназначена для слежения за целью по азимуту и углу места нормалью фазированной антенной решетки (ФАР) станции наведения.
Известна система управления вентильным электродвигателем вращения антенны радиолокационной станции (патент РФ №2541151, МПК H01Q 7/00, H01Q 3/00, H02P 7/00, G05B 15/00, G05D 3/00, публ.10.02.2015), включающая выпрямитель, инвертор, вентильный электродвигатель, на валу ротора которого установлены датчик скорости и редуктор, выходная ось которого механически соединена с валом антенны, преобразователь напряжения, выходом подключенный к первым входам приемопередающих устройств, входами-выходами соединенных с диполями антенны, а также расположенный на антенне датчик величины изгиба ее полотна, выход которого через устройство коррекции скорости, блок управления инвертором и блок драйверов соединен со вторым входом инвертора, причем второй вход блока управления инвертором соединен с первым выходом датчика скорости, а вход выпрямителя подключен к системе автономного электроснабжения, последовательно соединенные аналого-цифровой преобразователь и диаграммообразующая система, выход которой соединен со вторыми входами приемопередающих устройств, вход аналого-цифрового преобразователя - со вторым выходом датчика скорости, а вход преобразователя напряжения подключен к системе автономного электроснабжения, выход выпрямителя подключен к первому входу инвертора, выход которого соединен с входом вентильного электродвигателя.
Основными недостатками указанной системы управления вентильным электродвигателем вращения антенны радиолокационной станции являются:
- не обеспечивается векторное управление приводами, поэтому не обеспечивается максимальный момент двигателей на разных частотах вращения,
- не обеспечивается расширенный диапазон регулирования и точность регулирования частоты при номинальных моментах,
- не обеспечена быстрота реакции относительно изменении нагрузки, а в области малых частот вращения – плавность и отсутствие рывков.
Технический результат, достигаемый при использовании системы управления приводами антенны станции наведения, заключается в повышении надежности и улучшении управляемости приводов по частоте и моменту.
Технический результат достигается тем, что система управления приводами антенны станции наведения содержит привод антенно-пускового устройства (АПУ) по азимуту, привод фазированной антенной решетки (ФАР) по углу места, датчики положения по азимута и углу места, пульт ручного управления, при этом каждый из приводов с векторным управлением включает в себя преобразователь частоты и синхронный двигатель с датчиком положения ротора, система управления также содержит вычислительную систему, в которой реализован алгоритм экстраполяции координат целей, с блоком управления, соединенным последовательным интерфейсом с преобразователями частоты электроприводов по двум каналам позиционирования по координатам азимута и углу места, при этом датчики положения по азимута и углу места, соединены с вычислителем через блок преобразования угловых координат в цифровой код, каждый преобразователь частоты включает в себя узел фильтров входного напряжения, микроконтроллер, соединенный входами с блоком управления и датчиками положения роторов электродвигателей, а выходом с узлом драйверов, который в свою очередь через узел затворных резисторов и узел фильтров соединен с электроприводом.
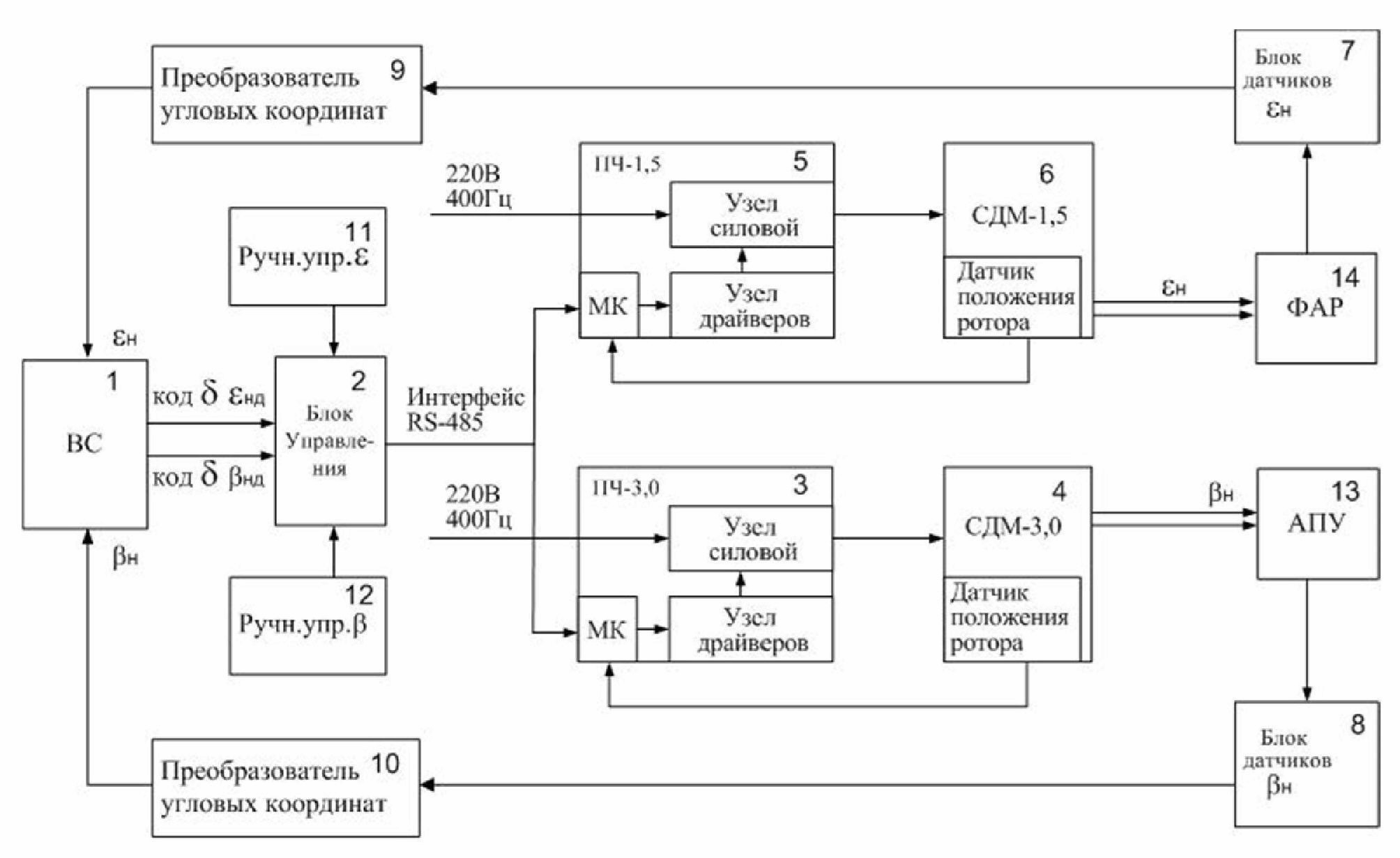
На фигуре представлена структурная схема системы управления приводами антенны станции наведения.
Система управления состоит из двух подобных каналов (приводов) – антенно-пускового устройства (АПУ) по азимуту βн и фазированной антенной решетки (ФАР) по углу места εН, вычислительной системы (ВС) 1 c блоком управления 2. В канал βн входят преобразователь частоты ПЧ-3,0 (3) соединенный с синхронным двигателем с датчиком положения ротора СДМ-3,0 (4), а в канал εН – преобразователь частоты ПЧ-1,5 (5) и синхронный двигатель с датчиком положения ротора (ДПР) СДМ-1,5 (6). Каждый преобразователь частоты (ПЧ) 3 и 5 содержит микроконтроллер, соединенный через узел драйверов с силовым узлом, который включает узел фильтров с выпрямителем, узел затворных резисторов и инвертор.
С помощью ВС 1 осуществляется автоматическое управление каналами βн и εН в различных режимах работы.
Выходная числовая магистраль ВС 1 приходит на вход блока управления 2, который соединен входами с пультами ручного управления 11, 12 по двум координатам. Выход блока управления 2 по интерфейсу RS-485 соединен со входами управления преобразователя частоты ПЧ-1.5( ПЧ-3.0) 3 и 5. Выходы ПЧ-1.5( ПЧ-3.0) соединены с синхронными двигателями СДМ-1.5(3.0) на валах которых установлены ДПР. Выходы ДПР соединены соответственно с входами обратной связи в ПЧ-1.5( ПЧ-3.0). Синхронные двигатели СДМ-1.5(3.0) через редуктор механически соединены с АПУ 13 и ФАР 14 на осях которых установлены блоки датчиков ɛн (βн) 7 и 8.
Информацию об угловых координатах βн и εН снимают соответственно с блоков датчиков 7 и 8 и передают на преобразователи угловых координат 9 и 10, где сигналы с датчиков преобразуются в код, а затем передают в ВС 1.
Система управления приводами антенны работает следующим образом.
На основании показаний датчиков (βн и ɛн) 7 и 8, обрабатываемых преобразователями угловых координат 9 и 10, ВС 1 рассчитывает необходимое отклонение от требуемой координаты и передает это отклонение для обработки в блок управления 2. Блок управления 2 выполняет необходимые преобразования полученного от ВС 1 задания и отправляет на ПЧ 3 и 5 необходимую скорость вращения по интерфейсу RS-485. Микроконтроллеры в составе ПЧ 3, 5 на основании показаний с датчиков положения ротора в двигателях (СДМ-1,5 и СДМ-3,0) 4 и 6 формируют сигналы, которые усиливают и подают на двигатели, вращающие АПУ 13 и ФАР 14.
В ВС 1 реализован алгоритм экстраполяции координат цели, с положительной прямой связью по скорости цели, который компенсирует скоростную ошибку следящей системы. Информация об угловых координатах пересчитывается в значение скоростей приводов, которые передаются в микроконтроллеры преобразователей частот 3 и 5 соответственно посредством последовательного интерфейса передачи данных по протоколу RS-485.
Узел микроконтроллера преобразователя частоты 3 и 5 предназначен для формирования широтно-импульсно модулированных (ШИМ) сигналов управления заданной частоты и амплитуды по закону изменения частоты и напряжения. Функцией микроконтроллера также являются анализ сигналов схемы защиты от перегрузок и остановка или полное выключение изделия в случае возникновения перегрева, перегрузки или состояния ошибки изделия.
В преобразователях частоты 3 и 5 преобразуют переменное трехфазное напряжение 220 В и частотой 400 Гц на входе в регулируемое переменное напряжение, которое подается с силового узла на вход электродвигателей 4 и 6.
Канал βн (аналогично каналу εН) является позиционной следящей системой, в которой главная обратная связь по положению реализована за счет оцифровки положения выходного вала с помощью ДПР, выполненных с применением вращающихся трансформаторов.
В качестве электромеханического узла электропривода применен синхронный электродвигатель с датчиком положения ротора, что обеспечивает требуемую управляемость привода по частоте и моменту.
Сигнал с датчика положения ротора типа синусно-косинусного вращающегося трансформатора (СКВТ) передает данные в микроконтроллер преобразователя. СКВТ применен в качестве обратной связи для определения положения угла ротора и скорости вращения ротора электродвигателя с высокой точностью, а также относительного положения антенного аппарата в пространстве.
Узел силовой, входящий в состав преобразователей 3 и 5, преобразует входное напряжение. В состав узла входит узел фильтров, выпрямитель, звено постоянного тока и инвертор. Основу звена постоянного тока образует блок конденсаторов. Блок конденсаторов заряжается постоянным входным напряжением 300 В, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Инвертор обеспечивает подачу на фазы двигателей 4 и 6 трех синусоидальных сигналов с требуемой частотой огибающей и величиной напряжения. Инвертор выполнен на 6 IGBT ключах, защищенных обратно смещенными диодами.
Узел фильтров преобразователей сглаживает импульсное напряжение и подавляет пульсации и предназначен для обеспечения питания нагрузки напряжением необходимого качества. Применение фильтров позволяет понизить уровни радиопомех, создаваемых электроприводом.
При торможении синхронный двигатель отдает энергию назад в преобразователь частоты (работает в генераторном режиме), вследствие чего напряжение в звене постоянного тока повышается. При осуществлении быстрого торможения используют тормозной ключ и резистор. При торможении электропривода тормозной резистор подключается к шине постоянного тока внутри преобразователя частоты, и на нем рассеивается энергия от электродвигателя. Это защищает преобразователь от блокировки по причине перенапряжения в звене постоянного тока и, соответственно, от остановки привода, а сеть от выбросов энергии.
Узел затворных резисторов, входящий в узел силовой, предназначен для защиты от перенапряжения в цепях управления силовых IGBT ключей.
Применение в преобразователях частоты микроконтроллера, соединенного входами с блоком управления и датчиками положения роторов электродвигателей, а выходом с узлом драйверов, который в свою очередь через узел затворных резисторов и узел фильтров соединен с электроприводом позволило повысить надежность системы управления антенной.
Использование обратной связи для определения положения угла ротора и скорости вращения ротора электродвигателя с высокой точностью с применением датчиков положения ротора типа синусно-косинусного вращающегося трансформатора с микроконтроллером преобразователя позволило улучшить управляемость приводов по частоте и моменту.
Система управления приводами антенны станции наведения содержит привод антенно-пускового устройства (АПУ) по азимуту, привод фазированной антенной решетки (ФАР) по углу места, датчики положения по азимуту и углу места, пульт ручного управления, при этом каждый из приводов с векторным управлением включает в себя преобразователь частоты и синхронный двигатель с датчиком положения ротора, система управления также содержит вычислительную систему, в которой реализован алгоритм экстраполяции координат целей, с блоком управления, соединенным последовательным интерфейсом с преобразователями частоты электроприводов по двум каналам позиционирования по координатам азимута и углу места, при этом датчики положения по азимуту и углу места соединены с вычислителем через блок преобразования угловых координат в цифровой код, каждый преобразователь частоты включает в себя узел фильтров входного напряжения, микроконтроллер, соединенный входами с блоком управления и датчиками положения роторов электродвигателей, а выходом с узлом драйверов, который в свою очередь через узел затворных резисторов и узел силовой соединен с электроприводом.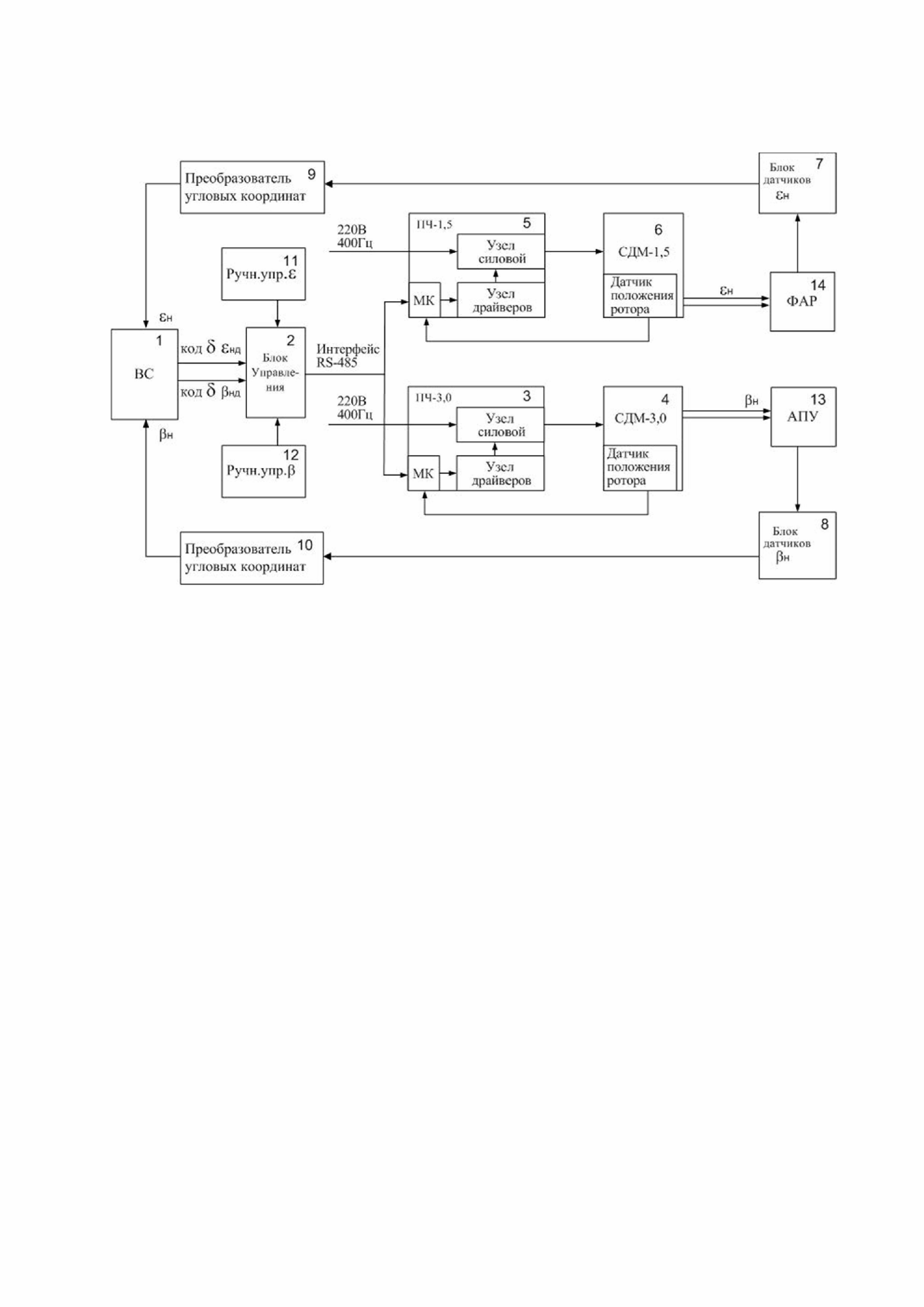
Фильтр для нагнетательных скважин
Универсальный мишенно-тренировочный комплекс
Способ и система компенсации дрейфа твердотельного волнового гироскопа
Летательный аппарат с дополнительным сбрасываемым крылом
Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа
Универсальный мишенный комплекс
Способ определения положения центра тяжести массивных изделий
Клапан промывочный
Наземная мишенная установка типа вертолет
Способ контроля физических параметров резонатора твердотельного волнового гироскопа

