Результат интеллектуальной деятельности: Способ получения вероятностной оценки возможности преодоления зон поражения зенитных управляемых ракет маневрирующим беспилотным летательным аппаратом
Вид РИД
Изобретение
Изобретение относится к области управления полетами аэробаллистических беспилотных летательных аппаратов (БЛА) и может быть использовано при планировании их траекторий с участками, пролегающими в зонах поражения зенитных управляемых ракет (ЗУР).
В патентной литературе нет описаний способов вероятностного оценивания эффективности маневров летательных аппаратов.
Наиболее близким к данному изобретению является патент RU 2 634 659 C1 [1], базирующийся на следующих положениях. При планировании маршрутов БЛА с неизбежным пребыванием в зоне действия средств противоракетной и противовоздушной обороны (ПРО-ПВО) задают временную программу движения БЛА с входом и пребыванием в зоне поражения ЗУР по времени, меньшем, чем необходимо ЗУР для перехвата данной цели. Ожидается, что произойдет срыв наведения стартующей на перехват ЗУР. Программа движения БЛА предусматривает маневры неоднократного входа и выхода БЛА из зоны поражения ЗУР. Авторы изобретения полагают, что предложенный способ маневрирования БЛА полностью устраняет или существенно уменьшает возможность поражения БЛА при осуществлении разведки территории противника и выполнении некоторых других задач.
Недостатки данного способа:
1. Способ непригоден для планирования траекторий высокоскоростных ударных БЛА, цели которых охраняются зенитными ракетными комплексами с достаточно большим числом ЗУР.
2. Способ не позволяет оценить эффективность задаваемых маневров БЛА количественно, по вероятности.
Задачей предлагаемого изобретения является создание способа, позволяющего заблаговременно приближенно оценивать потенциальную вероятность поражения или непоражения БЛА при его движении с заданным маневром в зонах поражения ЗУР объектовой ПРО и ПВО.
Технический результат достигается тем, что при компьютерном моделировании движения БЛА в каждой точке его траектории в зоне поражения ЗУР рассчитывают текущие значения показателя интенсивности маневрирования БЛА и сравнивают его с текущими требуемыми значениями, обеспечивающими непоражение БЛА с заданной вероятностью, вероятностную оценку возможности преодоления зоны поражения ЗУР получают отношением суммы временных интервалов движения БЛА с благоприятным для БЛА исходом возможных встреч с ЗУР ко всему времени движения БЛА в зоне поражения ЗУР.
Сущность изобретения поясняется приведенным ниже описанием, фигурами 1, 2, 3 и подтверждается примером моделирования движения БЛА на участке пикирования с противоперехватным маневром в таблице 1.
Предлагаемый способ базируется на следующих основных положениях:
1. Перехват БЛА зенитной управляемой ракетой осуществляется в два этапа. На первом осуществляется наведение ЗУР в упрежденную точку встречи S*. На втором этапе, за несколько секунд до встречи, наведение осуществляется непосредственно на цель (фиг.1). Последняя коррекция наведения ЗУР осуществляется за счет двигателя поперечного управления (ДПУ), создающего за малый отрезок времени ΔtДПУ необходимое управляющее ускорение в требуемом поперечном направлении  в пределах ограничения
в пределах ограничения

После отработки импульса тяги ДПУ выдается команда на подрыв осколочно-фугасного заряда боевой части ЗУР.
2. Вероятность поражения БЛА зависит от многих факторов, основными из которых являются: погрешность наведения ЗУР – промах  где
где  - динамическая составляющая (составляющая промаха, обусловленная недостаточностью ресурса управления в поперечном направлении),
- динамическая составляющая (составляющая промаха, обусловленная недостаточностью ресурса управления в поперечном направлении),  - случайная составляющая; мощность боевого заряда ЗУР как функция его массы mбз и стойкость БЛА k, задаваемая коэффициентом ослабления ущерба, наносимого взрывом заряда ЗУР [2]:
- случайная составляющая; мощность боевого заряда ЗУР как функция его массы mбз и стойкость БЛА k, задаваемая коэффициентом ослабления ущерба, наносимого взрывом заряда ЗУР [2]:

где  - нормированное среднеквадратическое отклонение.
- нормированное среднеквадратическое отклонение.
Случайная составляющая погрешности наведения ЗУР очень мала и здесь не учитывается. Формула для расчета вероятности поражения БЛА [2] с учетом замечания относительно величины  имеет вид:
имеет вид:

Где  - нормирующий коэффициент, учитывающий особенности ЗУР и БЛА.
- нормирующий коэффициент, учитывающий особенности ЗУР и БЛА.
3. Маневренность летательного аппарата - это его способность изменять направление движения под действием управляющих сил. Показателем интенсивности маневрирования БЛА на рассматриваемом участке траектории могут служить текущие значения его поперечного ускорения  направленного по нормали к вектору скорости, или угловая скорость изменения направления движения БЛА
направленного по нормали к вектору скорости, или угловая скорость изменения направления движения БЛА  которую можно определить с помощью выражения:
которую можно определить с помощью выражения:

где Δt - небольшой временной интервал, например, шаг численного интегрирования уравнений движения БЛА.
Показателем же интенсивности маневрирования ЗУР на этапе последней коррекции наведения на цель может служить ее поперечное ускорение  создаваемое ДПУ, с ограничением (1).
создаваемое ДПУ, с ограничением (1).
4. Из выражения (3) для любого значения промаха ЗУР определенного типа можно определить соответствующее значение вероятности поражения цели с определенным коэффициентом стойкости:

Отметим, что в силу непрерывности функции (2) существует такое значение промаха ЗУР (назовем его пороговым  ), начиная с которого, вероятность поражения цели взрывом осколочно-фугасного заряда ЗУР становится настолько малой, что не выводит ее из строя. Ее называют допустимой вероятностью поражения:
), начиная с которого, вероятность поражения цели взрывом осколочно-фугасного заряда ЗУР становится настолько малой, что не выводит ее из строя. Ее называют допустимой вероятностью поражения:  а величину
а величину  - требуемым значением вероятности непоражения цели, или критерием эффективности маневра БЛА.
- требуемым значением вероятности непоражения цели, или критерием эффективности маневра БЛА.
5. Если в любой точке траектории в зоне поражения ЗУР с помощью маневра обеспечивается требуемое значение вероятности непоражения БЛА, то такой маневр будем считать эффективным.
6. Очевидно, что промах ЗУР зависит от соотношения интенсивности маневрирования БЛА в зоне поражения ЗУР и максимальных маневренных возможностей ЗУР. Выражение в явном виде зависимости  при
при 

позволит определить требуемое значение интенсивности маневрирования БЛА  на любой момент t в зоне поражения ЗУР.
на любой момент t в зоне поражения ЗУР.
Если во все время движения БЛА в зоне поражения ЗУР выполняется условие

то маневр может считаться эффективным, а текущее значение разности  - показателем эффективности маневра БЛА на данном участке траектории в зоне поражения ЗУР.
- показателем эффективности маневра БЛА на данном участке траектории в зоне поражения ЗУР.
Для получения явной формы функциональной зависимости (6), из которой определится требуемое значение показателя интенсивности маневрирования БЛА  рассмотрим взаимное расположение ЗУР и БЛА в двух случаях: первый (фиг. 2) - на момент начала работы ДПУ ЗУР, и второй (фиг. 3) - на момент окончания работы ДПУ tк = tн + ΔtДПУ, одновременно являющийся моментом взрыва заряда ЗУР.
рассмотрим взаимное расположение ЗУР и БЛА в двух случаях: первый (фиг. 2) - на момент начала работы ДПУ ЗУР, и второй (фиг. 3) - на момент окончания работы ДПУ tк = tн + ΔtДПУ, одновременно являющийся моментом взрыва заряда ЗУР.
На фигуре 2 представлено наиболее выгодное для ЗУР взаимное расположение ЗУР и БЛА на момент начала последней коррекции наведения ЗУР на расстоянии  Выгодное, потому что в случае отсутствия маневра цели с угловой скоростью
Выгодное, потому что в случае отсутствия маневра цели с угловой скоростью  она будет поражена непосредственным соударением, а при наличии маневра цели для ее поражения из этого положения требуется наименьшее поперечное ускорение от ДПУ
она будет поражена непосредственным соударением, а при наличии маневра цели для ее поражения из этого положения требуется наименьшее поперечное ускорение от ДПУ 
На фигуре 3 в картинной плоскости относительно линии визирования цели отображено положение БЛА в момент взрыва заряда ЗУР в случае, когда БЛА за время срабатывания всех микродвигателей ДПУ ΔtДПУ за счет своего маневра успевает пройти в поперечном направлении расстояние  и оказаться на безопасном расстоянии и от центра взрыва:
и оказаться на безопасном расстоянии и от центра взрыва:

Где  - расстояние в поперечном направлении, пройденное ЗУР за время ΔtДПУ.
- расстояние в поперечном направлении, пройденное ЗУР за время ΔtДПУ.
Расстояние  определим в виде:
определим в виде:

и при допущении, что в процессе поочередного (при вращении корпуса ЗУР) подключения к работе всех групп микродвигателей ДПУ поперечное ускорение ЗУР  нарастает по линейному закону до своего максимального значения
нарастает по линейному закону до своего максимального значения  выражение (9) принимает вид:
выражение (9) принимает вид:

Выражение (8) в явной форме с учетом возможности вычисления величины  по формуле (5) имеет вид:
по формуле (5) имеет вид:

С другой стороны, расстояние  может быть рассчитано (см. фиг. 3) по формуле:
может быть рассчитано (см. фиг. 3) по формуле:

При допущении постоянства величины скорости БЛА на интервале времени ΔtДПУ выражение (11) принимает вид:

Приравнивая выражения (11) и (13) и разрешая полученное выражение относительно величины  получаем формулу для вычисления требуемого значения интенсивности маневрирования БЛА на любой момент времени его движения в зоне поражения ЗУР:
получаем формулу для вычисления требуемого значения интенсивности маневрирования БЛА на любой момент времени его движения в зоне поражения ЗУР:

Теперь для оценивания эффективности любого маневра БЛА в зоне поражения ЗУР необходимо сравнить текущие значения показателя его маневренности  с требуемыми значениями
с требуемыми значениями  на одни те же моменты времени. Текущее значение
на одни те же моменты времени. Текущее значение  рассчитывается в процессе компьютерного моделирования движения БЛА с заданным маневром по формуле (4).
рассчитывается в процессе компьютерного моделирования движения БЛА с заданным маневром по формуле (4).
Суть предлагаемого изобретения заключается в том, что в процессе компьютерного моделирования движения БЛА в зоне поражения ЗУР с небольшими интервалами по времени рассчитываются разности между текущими и требуемыми значениями показателя интенсивности маневрирования БЛА:

и по совокупности знаков параметра  - «+» или «-» - маневр оценивается как эффективный или неэффективный.
- «+» или «-» - маневр оценивается как эффективный или неэффективный.
Параметр  назовем показателем эффективности маневра БЛА. При всех положительных значениях параметра
назовем показателем эффективности маневра БЛА. При всех положительных значениях параметра  маневр признается эффективным. При наличии значительной доли значений
маневр признается эффективным. При наличии значительной доли значений  со знаком «-» маневр БЛА оценивается как неэффективный. При наличии небольшого числа отрицательных значений этого параметра маневр можно признать частично удовлетворяющим заданному критерию эффективности. Дополнительную информацию о качестве маневра дают величины модулей параметра
со знаком «-» маневр БЛА оценивается как неэффективный. При наличии небольшого числа отрицательных значений этого параметра маневр можно признать частично удовлетворяющим заданному критерию эффективности. Дополнительную информацию о качестве маневра дают величины модулей параметра  Они позволяют оценить необходимость и возможность повышения эффективности маневра БЛА на проблемных участках планируемой траектории.
Они позволяют оценить необходимость и возможность повышения эффективности маневра БЛА на проблемных участках планируемой траектории.
Пример использования предлагаемого способа приводится ниже.
Рассматривается участок пикирования БЛА с маневром, заданным несколькими опорными точками, служащими промежуточными точками наведения БЛА. Траектория БЛА пересекает зоны поражения двух разных ЗУР: зону поражения двухступенчатой ЗУР и зону одноступенчатой ЗУР. Маневренные возможности боевых ступеней обеих ЗУР одинаковы: ДПУ могут создать им максимальное ускорение в поперечном направлении  м/с2 за время ΔtДПУ = 1 с, но их боевые заряды различны: у двухступенчатой ЗУР mбз = 60 кг, у одноступенчатой mбз = 11 кг. При стойкости БЛА k=1 и заданном критерии эффективности, соответствующем вероятности непоражения
м/с2 за время ΔtДПУ = 1 с, но их боевые заряды различны: у двухступенчатой ЗУР mбз = 60 кг, у одноступенчатой mбз = 11 кг. При стойкости БЛА k=1 и заданном критерии эффективности, соответствующем вероятности непоражения  пороговые значения радиусов поражения от взрывов зарядов ЗУР составляют соответственно
пороговые значения радиусов поражения от взрывов зарядов ЗУР составляют соответственно  и 7.5 м.
и 7.5 м.
В таблице 1 представлены результаты моделирования движения БЛА на участке пикирования с последовательным пролетом через обе зоны. В таблице приняты следующие обозначения: t - текущее время движения БЛА; Η -текущая высота траектории БЛА; V - текущая скорость БЛА; AzV – текущий азимут направления движения БЛА; tetaV - текущий угол наклона вектора скорости БЛА к местному горизонту; db/dt - текущие значения показателя интенсивности маневрирования БЛА; dbtr/dt - требуемые значения показателя интенсивности маневрирования БЛА; delta - текущие значения показателя эффективности маневра БЛА; n - текущая поперечная перегрузка БЛА.
Параметры Η, V, AzV, tetaV характеризуют текущие изменения направления движения БЛА. Параметр db/dt - текущее значение показателя интенсивности маневрирования БЛА, параметр dbtr/dt - текущее требуемое значение показателя интенсивности маневрирования БЛА, параметр delta - разность текущих значений этих параметров.

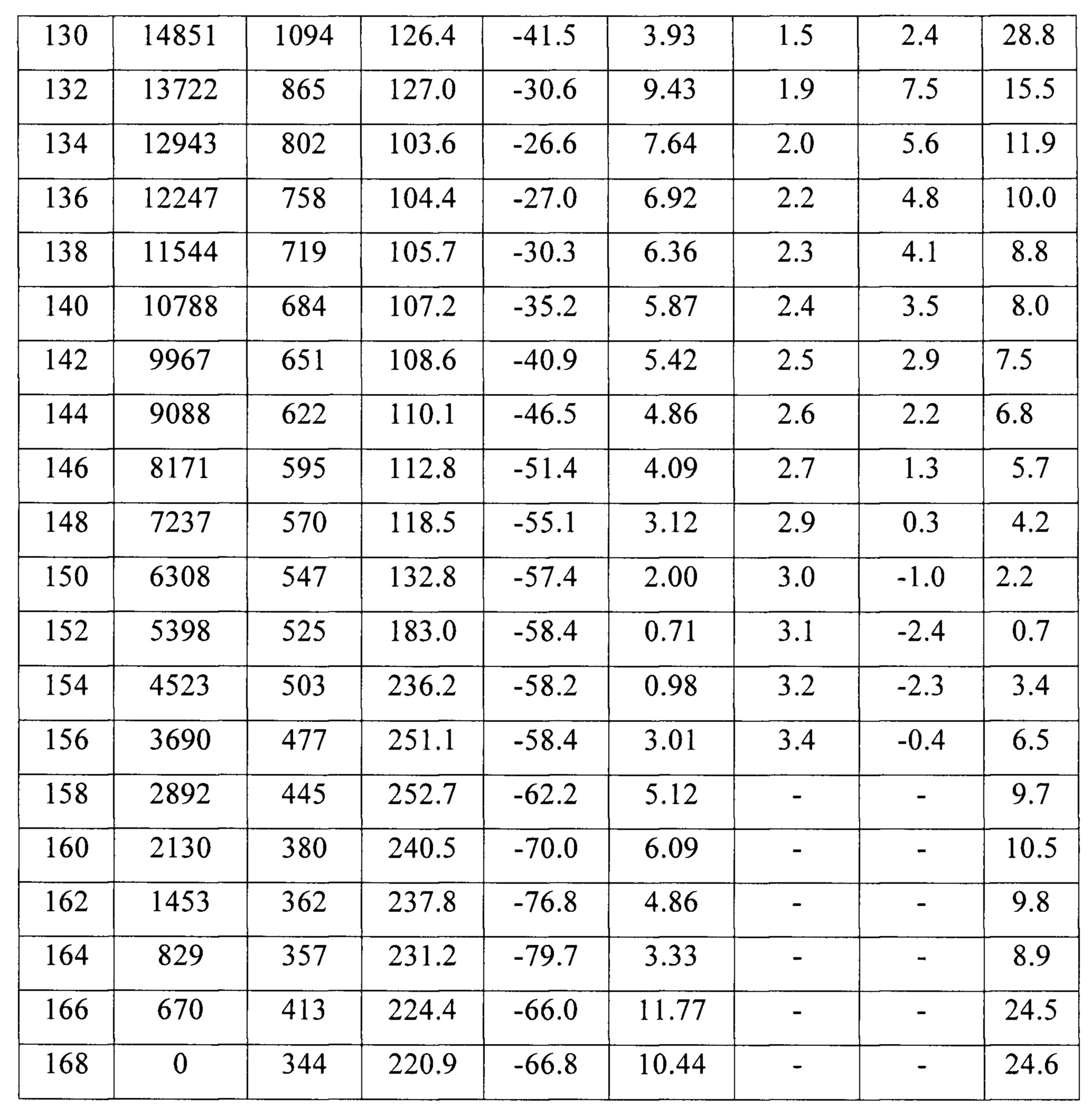
По результатам моделирования траектории БЛА можно сделать выводы:
1. В зоне поражения двухступенчатой ЗУР значения показателя эффективности маневра БЛА положительны (delta>0) при всех t, (tвх ≤ t ≤ tвых) и, следовательно, заданный маневр БЛА полностью удовлетворяет заданному значению критерия эффективности 
2. В зоне поражения одноступенчатой ЗУР заданный маневр нельзя признать эффективным, поскольку в диапазоне высот от 6 до 3 км текущие значения параметра delta отрицательны. Значения параметра db/dt оказались меньше требуемых значений dbtr/dt. Однако, если приемлемо понятие частичного удовлетворения заданному значению критерия эффективности, то с помощью отношения времени движения при выполнении условия delta>0 - ΔТ(+) ко времени движения на всем участке в зоне поражения ЗУР - Т(мз), величина

вычисленная по окончании моделирования движения БЛА, может трактоваться как удовлетворение заданному значению критерия эффективности маневра на X процентов.
В приведенном примере (таблица 1) ΔТ(+) = 20 с, Т(мз) - 26 с и, следовательно, маневр БЛА в зоне поражения одноступенчатой ЗУР удовлетворяет заданному значению критерия эффективности  на 77%.
на 77%.
3. Чтобы маневр стал полностью эффективным, можно:
а) внести изменения в конфигурацию маневра, изменив положения одной-двух опорных точек траектории и повторить расчет траектории БЛА с контролем показателя эффективности маневра;
б) не внося изменений в конфигурацию маневра, повторить моделирование движения БЛА при пониженном значении критерия эффективности - вероятности непоражения, например, при  вместо
вместо  что соответствует уменьшению порогового значения радиуса поражения БЛА взрывом заряда одноступенчатой ЗУР с 7.5 м до 5 м.
что соответствует уменьшению порогового значения радиуса поражения БЛА взрывом заряда одноступенчатой ЗУР с 7.5 м до 5 м.
Источники информации
1. Патент RU 2634659 С1, 2017.
2. Проектирование зенитных управляемых ракет / И.И. Архангельский, П.П. Афанасьев, Е.Г. Болотов, И.С. Голубев, А.М. Матвеенко, В.Я. Мизрохи, В.Н. Новиков, С.Н. Остапенко, В.Г. Светлов; под ред. И.С. Голубева и В.Г. Светлова. - изд. 2-е, перераб. и доп. - М: Изд-во МАИ, 2001. - 732 с.
Способ получения вероятностной оценки возможности преодоления зоны поражения зенитной управляемой ракеты (ЗУР) маневрирующим беспилотным летательным аппаратом (БЛА), заключающийся в том, что при компьютерном моделировании движения БЛА в каждой точке его траектории в зоне поражения ЗУР рассчитывают текущие значения показателя интенсивности маневрирования БЛА и сравнивают его с текущими требуемыми значениями, обеспечивающими непоражение БЛА с заданной вероятностью, вероятностную оценку возможности преодоления зоны поражения ЗУР получают отношением суммы временных интервалов движения БЛА с благоприятным для БЛА исходом возможных встреч с ЗУР ко всему времени движения БЛА в зоне поражения ЗУР.
Ракетная двигательная установка с устройством диспергирования твёрдого топлива
Система гашения вытяжного парашюта
Устройство для моделирования процесса функционирования системы управления
Передатчик информационной и энергетической скрытности
Устройство для моделирования процесса поддержания сложного технического объекта в готовности к применению по назначению
Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации
Способ оценки остаточного ресурса конструкций теплообменного аппарата
Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства
Привязная мониторинговая платформа с системой питания
Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей
Способ формирования маневров произвольной конфигурации на конечном участке траектории планирующего беспилотного летательного аппарата
Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа
Способ управления беспилотным планирующим летательным аппаратом
Способ управления беспилотным планирующим летательным аппаратом на траекториях с изменениями направлений движения в заданных опорных точках

