Результат интеллектуальной деятельности: СПОСОБ ОПЕРАТИВНОГО ПОИСКА И ОБНАРУЖЕНИЯ ПОДВОДНОГО ИСТОЧНИКА ЗВУКА
Вид РИД
Изобретение
Изобретение относится к радиолокации поверхности океана с летательных аппаратов и может быть использовано при поиске и обнаружении подводных источников звука. Геометрия двух-позиционного визирования морской поверхности в режиме квазизеркального рассеяния показана на фиг. 1.
Известные способы обнаружения подводного источника звука. Задача выделения вибросигнала на фоне ветровых волн с использованием электромагнитного излучения не является новой. В работе [4] рассматривалось взаимодействие звуковой волны от подводного источника с поверхностной волной при визировании поверхности лучом лазера, работающего в непрерывном режиме. Эксперимент проводился в ванне, снабженной волнопродуктором, а для когерентной обработки и спектрального разделения вибросигнала и волновой помехи требовалось определенное «расстояние когерентности» светового пучка. В работе [5] аналогичный эксперимент проводился в СВЧ-диапазоне при визировании взволнованной поверхности в надир. Имеются и патенты, где в том или ином виде предлагается использовать электромагнитный сигнал для обнаружения подводного источника звука. В патенте США «Underwater object locating system», №3.903.520 [6] предлагается «способ пеленгации подводного объекта посредством индикации доплеровского сдвига в приемном канале радара». Передающая антенна корабельного радара направлена на поверхность моря, и в эту же точку поверхности направлена приемная антенна, установленная на другом корабле.
Доплеровский сдвиг объясняется «наличием биений сигналов, отраженных от поверхности и от глубинного слоя, подверженного модуляции звуком». В патенте США «Method and device for the optical non-contact oscillation measurement of an oscillation object» №20140041456 [7] используется когерентный лазерный излучатель.
Обоснование предлагаемого способа обнаружения
Два аппарата движутся с одинаковой скоростью Wx на одинаковых высотах Н. Излучающая и приемная антенны бокового обзора А1 и А2 имеют широкие (ножевые) диаграммы направленности антенн в вертикальной плоскости. На поверхности моря образуется «квазизеркальная» дорожка, угол визирования поверхности γ0 для зеркальной точки γ0 остается практически тем же во всей зоне обзора, ширина которой L достигает ~3H при γ0=65° [1, 2]. Область наименьшей суммарной дальности  вблизи зеркальной точки стробируется в приемнике, а рабочие области слева и справа от зеркальной точки
вблизи зеркальной точки стробируется в приемнике, а рабочие области слева и справа от зеркальной точки  разделяются по знаку доплеровского сдвига при наличии искусственного (малого) угла сноса α [3]. Важнейшее свойство данного способа зондирования морской поверхности заключается в том, что основной вклад в отраженный сигнал вносит плоская поверхность (френелевский коэффициент отражения), ширину зоны обзора определяют слабо зависящие от ветра мелкие волны с длинами, несколько большими длины волны радара, а крупные (энергонесущие) ветровые волны и зыбь несколько изменяют интенсивность отраженного сигнала в областях своих вершин и впадин. В обычном (одно-позиционном) радаре основной вклад дают мелкие («резонансные») ветровые волны, плоская поверхность практически не влияет на амплитуду и фазу отраженного сигнала.
разделяются по знаку доплеровского сдвига при наличии искусственного (малого) угла сноса α [3]. Важнейшее свойство данного способа зондирования морской поверхности заключается в том, что основной вклад в отраженный сигнал вносит плоская поверхность (френелевский коэффициент отражения), ширину зоны обзора определяют слабо зависящие от ветра мелкие волны с длинами, несколько большими длины волны радара, а крупные (энергонесущие) ветровые волны и зыбь несколько изменяют интенсивность отраженного сигнала в областях своих вершин и впадин. В обычном (одно-позиционном) радаре основной вклад дают мелкие («резонансные») ветровые волны, плоская поверхность практически не влияет на амплитуду и фазу отраженного сигнала.
Подводный звуковой источник, показанный на рис. 1, в пределах ограниченной площадки вызывает вертикальную вибрацию поверхности с амплитудой

где PS, HS, DS - мощность, глубина и размер антенны звукового источника, с - скорость звука в воде, ρ - плотность воды. Величина hm чрезвычайно мала и составляет (10-7÷10-5) м при подстановке в (1) параметров реальных источников. Поскольку вертикальная скорость виброволны проектируется на луч приемной антенны под тем же углом, что и орбитальная скорость ветровой волны, то можно сравнивать частотный спектр скорости ветровых волн с частотным спектром скорости виброволны. Плотность частотного спектра скорости ветровых волн имеет вид

где W - скорость ветра, g - ускорение силы тяжести, α0=6,5⋅10-3. Для частот ω=2πF, F>10 Гц, можно пренебречь экспоненциальным множителем (зависимостью от скорости ветра). Поскольку сигнал на площадке накапливается когерентно за время порядка секунды, то при частотах вибросигнала порядка 1 КГц и использовании узкополосного анализатора спектра на выходе фазового детектора - допустимо сравнивать плотность спектра (2) с плотностью спектра вибросигнала

Обозначим через q0 до отношение полезного сигнала (3) к помехе (2),  тогда условию q0>3 при малых hm должны соответствовать частоты
тогда условию q0>3 при малых hm должны соответствовать частоты

Например, при hm=10-6 м имеется возможность разделить спектры вибросигнала и волновой помехи при частотах F>220 Гц. Полученный результат не учитывает эффект осреднения поля скоростей ветровых волн на визируемой радаром площадке. Осреднение в пространстве приводит к усреднению во времени, так что в действительности полученная минимальная частота вибросигнала (4) должна быть еще меньше.
Вторая проблема при выделении слабого вибросигнала связана с энергетикой двухпозиционного радара. Можно показать, что отношение мощности «полезного» сигнала к воспринимаемой радаром мощности фонового сигнала составляет

т.е. в СВЧ диапазоне, λ=(1÷3)⋅10-2 м, эта величина опять-таки мала. Имеется соотношение, связывающее импульсные мощности излучаемого (Р1) и принимаемого (P2) фоновых сигналов в двухпозиционном радаре:

Здесь Н - высота летательного аппарата,  - относительное положение площадки в зоне обзора, Dx и Dz - горизонтальный и вертикальный размеры одинаковых антенн, S0 - удельная эффективная площадь рассеяния поверхности (УЭПР), Δƒ - ширина спектра сигнала, с - скорость света. Поскольку интенсивность фонового сигнала должна в q2 раз превосходить собственный (тепловой) шум приемника, то для Р2 имеется соотношение
- относительное положение площадки в зоне обзора, Dx и Dz - горизонтальный и вертикальный размеры одинаковых антенн, S0 - удельная эффективная площадь рассеяния поверхности (УЭПР), Δƒ - ширина спектра сигнала, с - скорость света. Поскольку интенсивность фонового сигнала должна в q2 раз превосходить собственный (тепловой) шум приемника, то для Р2 имеется соотношение

где Tn - шумовая температура приемника; N1 - число когерентно накапливаемых импульсов за время азимутального синтеза (равное числу некогерентно накапливаемых реализаций теплового шума); k=1,34⋅10-23 Вт⋅с - постоянная Больцмана; ΔF - ширина частотного спектра полезного сигнала. Учитывая выражения (5), (6) и (7), получаем выражение для необходимой мощности излучения:

При ширине спектра СВЧ сигнала Δƒ=3⋅108 Гц, ширине спектра вибросигнала ΔF=103 Гц, УЭПР морской поверхности S0=1, q=3, hm=10-6 м, m=1, γ0=65° и остальных параметрах, характерных для современного самолетного РСА, из (8) получаем величину Р1≥5⋅103 Вт. При коэффициенте сжатия Q=Δƒτр=103 и длительности излучаемого импульса τр=3⋅10-6 с, получаем приемлемую излучаемую мощность (в длинном импульсе) порядка 10 Вт. Такой результат оказался возможен лишь при высокой УЭПР, характерной для данного (квазизеркального) метода зондирования морской поверхности.
Третья проблема связана с обработкой полученного сигнала в РСА, где одновременно с формированием фонового радиолокационного изображения (РЛИ) поверхности необходимо определять местоположение звукового источника. РЛИ формируется с осреднением на симметричной площадке размером d, число независимых (некогерентных) отсчетов фонового сигнала на этой площадке составляет  При d=100 м, в самолетном двухпозиционном РСА имеем N2~6⋅103, чему соответствует пороговая контрастно-фоновая чувствительность ~0,2 дБ. На выходе фазового детектора, которым и является азимутальный синтезатор, в пределах площадки d2 слабый вибросигнал присутствует в каждом элементе разрешения. Этот сигнал, занимающий всю площадку - одинаков для всех элементов разрешения, и должен накапливаться когерентно на всей площадке, включая элементы дальности - однако анализ спектра должен производиться независимо для каждого элемента дальности. Поскольку время синтеза Tsynth имеет порядок секунды, а ширина полосы анализатора спектра ΔF ~ 1 КГц, то процесс анализа спектра может происходить параллельно с процессом синтеза.
При d=100 м, в самолетном двухпозиционном РСА имеем N2~6⋅103, чему соответствует пороговая контрастно-фоновая чувствительность ~0,2 дБ. На выходе фазового детектора, которым и является азимутальный синтезатор, в пределах площадки d2 слабый вибросигнал присутствует в каждом элементе разрешения. Этот сигнал, занимающий всю площадку - одинаков для всех элементов разрешения, и должен накапливаться когерентно на всей площадке, включая элементы дальности - однако анализ спектра должен производиться независимо для каждого элемента дальности. Поскольку время синтеза Tsynth имеет порядок секунды, а ширина полосы анализатора спектра ΔF ~ 1 КГц, то процесс анализа спектра может происходить параллельно с процессом синтеза.
Возможность реализации
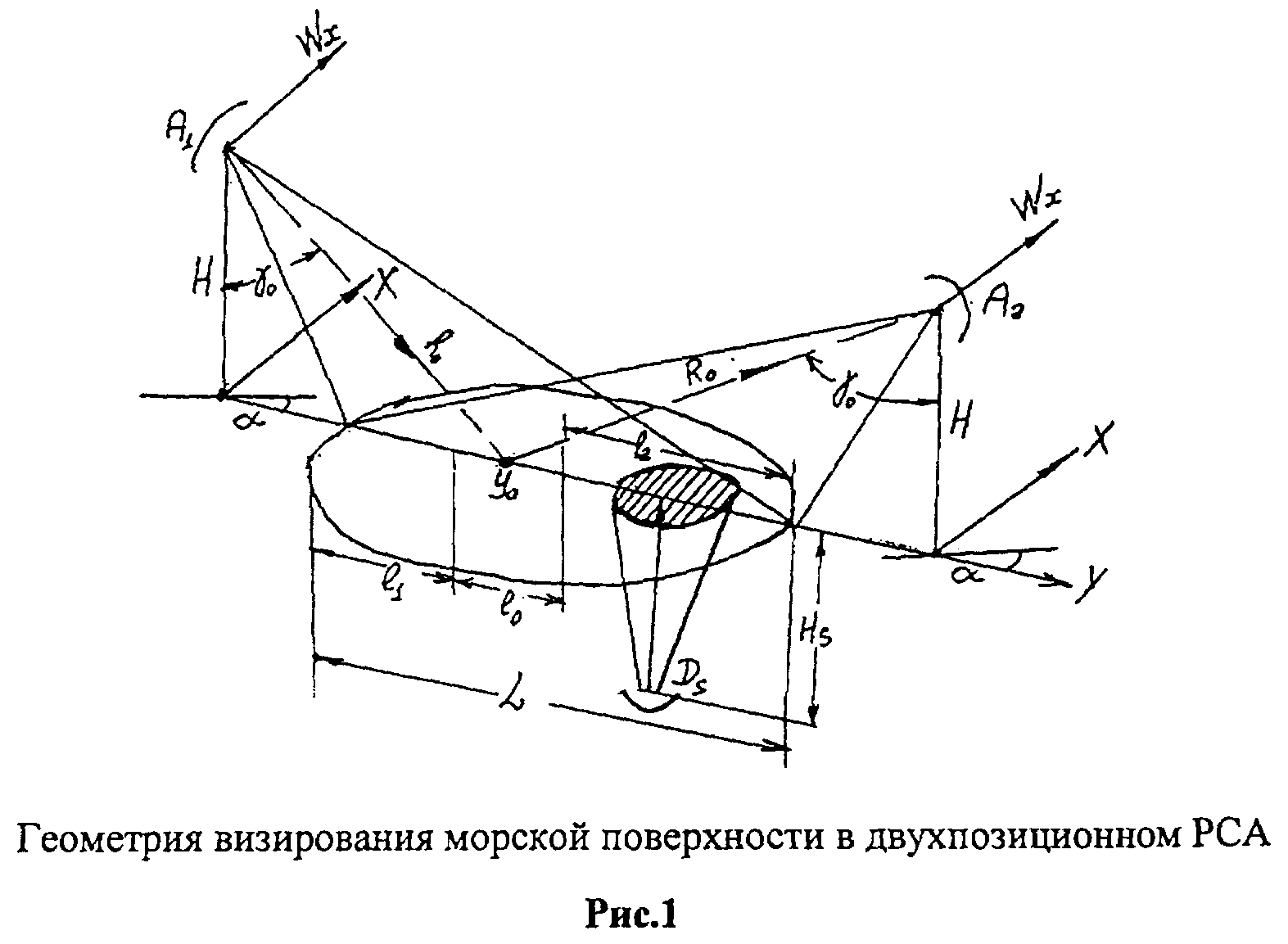
На фиг. 2 представлена функциональная схема, поясняющая способ обнаружения и определения местоположения вибросигнала в двухпозиционном РСА при формировании яркостного изображения морской поверхности. Обозначены: 1 - азимутальный синтез по каждому элементу дальности; 2 - анализ НЧ-спектра по каждому элементу дальности; 3 - осреднение на заданной площадке; 4 - формирование изображения с выделением вибросигнала; 5 - осреднение спекл-шума на заданной площадке, 6 - формирование пространственного фонового изображения; 7 - оператор сравнения изображений; а - исходный радиосигнал; б - опорный сигнал азимутального синтеза; в - параметры анализа НЧ-спектра; г - размер осредняющей площадки; д - параметры развертки РЛ изображений, е - введение априорных данных, ж - решение об обнаружении вибросигнала и его местоположении.
Таким образом, новизна предлагаемого «способа оперативного поиска и обнаружения подводного источника звука» состоит в сочетании известных способов: квазизеркального радиолокационного зондирования морской поверхности с широкой зоной бокового обзора (патенты [2, 3]) и радиолокационного способа пеленгации звукового источника по частотному сдвигу отраженного сигнала (патент [6]). Представляется, что подобное сочетание позволит обеспечить оперативное обнаружение источника звука на больших акваториях, ибо применяемые в настоящее время РЛ технологии (аэрокосмические радиолокаторы с синтезированной апертурой) обеспечивают в данном случае необходимую ширину зоны обзора (порядка 3Н), необходимое пространственное разрешение на морской поверхности (порядка 3 м по обеим осям при осреднении спекл-шума на площадках размером d~100 м) и необходимое время обработки (время азимутального синтеза порядка 1 с). В качестве прототипа предлагаемого способа следует указать патент [2].
Источники информации, принятые во внимание при составлении заявки
1. Переслегин С.В., Халиков З.А. Двухпозиционная квазизеркальная радиолокация морской поверхности // Известия РАН. Физика атмосферы и океана, 2011, т. 47, №4, с. 517-530.
2. Переслегин С.В., Халиков З.А., Риман В.В., Коваленко А.И., Неронский Л.Б. Радиолокационный способ оперативной диагностики океанских явлений из космоса / Патент РФ №2447457, 2009.
3. Переслегин С.В., Ивонин Д.В., Халиков З.А., Шапрон Б. Устройство формирования зон обзора в двухпозиционном радиолокаторе с синтезированной апертурой / Патент РФ №135816, 2013.
4. Чернсайд Дж. Х., Браво Х.Е., Наугольный К.А., Фукс И.М. Воздействие подводного звука и поверхностного волнения на рассеяние лазерного излучения // Акустический журнал, 2008, т. 34, №2, с. 244-250.
5. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности / РИЦ «Татьянин день», М., 1997, 263 с.
6. Shostak A. Underwater object locating system / US Patent №3.903.520, 1975.
7. Rembe A. and others. «Method and device for the optical non-contact oscillation measurement of an oscillation object» US Patent №20140041456, 2014.
Способ обнаружения подводного источника звука в двухпозиционном радиолокаторе с синтезированной апертурой (РСА), содержащем излучающую и приемную антенны бокового обзора, установленные на двух летательных аппаратах, движущихся с одинаковой скоростью на одинаковых высотах, причем излучающая и приемная антенны бокового обзора имеют широкие ножевые диаграммы направленности в вертикальной плоскости, заключающийся в том, что в двухпозиционном РСА используют квазизеркальный режим рассеяния излучаемого СВЧ сигнала на морской поверхности, в приемнике РСА осуществляют осреднение спекл-шума отраженного сигнала на симметричной площадке заданного размера и формируют фоновое радиолокационное (РЛ) изображение морской поверхности, отличающийся тем, что в приемнике РСА осуществляют азимутальный синтез по каждому элементу дальности, когерентно накапливая на всей симметричной площадке за время синтеза отраженного сигнала, включающего фоновый сигнал и вибросигнал, формируемый подводным звуковым источником, который в пределах ограниченной площадки вызывает вертикальную вибрацию поверхности моря, на выходе азимутального синтезатора в каждом элементе дальности производят анализ низкочастотного спектра отраженного сигнала с выделением области спектра частотно сдвинутого вибросигнала, проводят на симметричной площадке осреднение полученного сигнала по элементам дальности и азимута и формируют яркостное РЛ изображение морской поверхности с выделением вибросигнала, сравнивают полученное РЛ изображение с полученным фоновым РЛ изображением морской поверхности, и по результатам сравнения принимают решение о наличии подводного источника звука и его местоположении.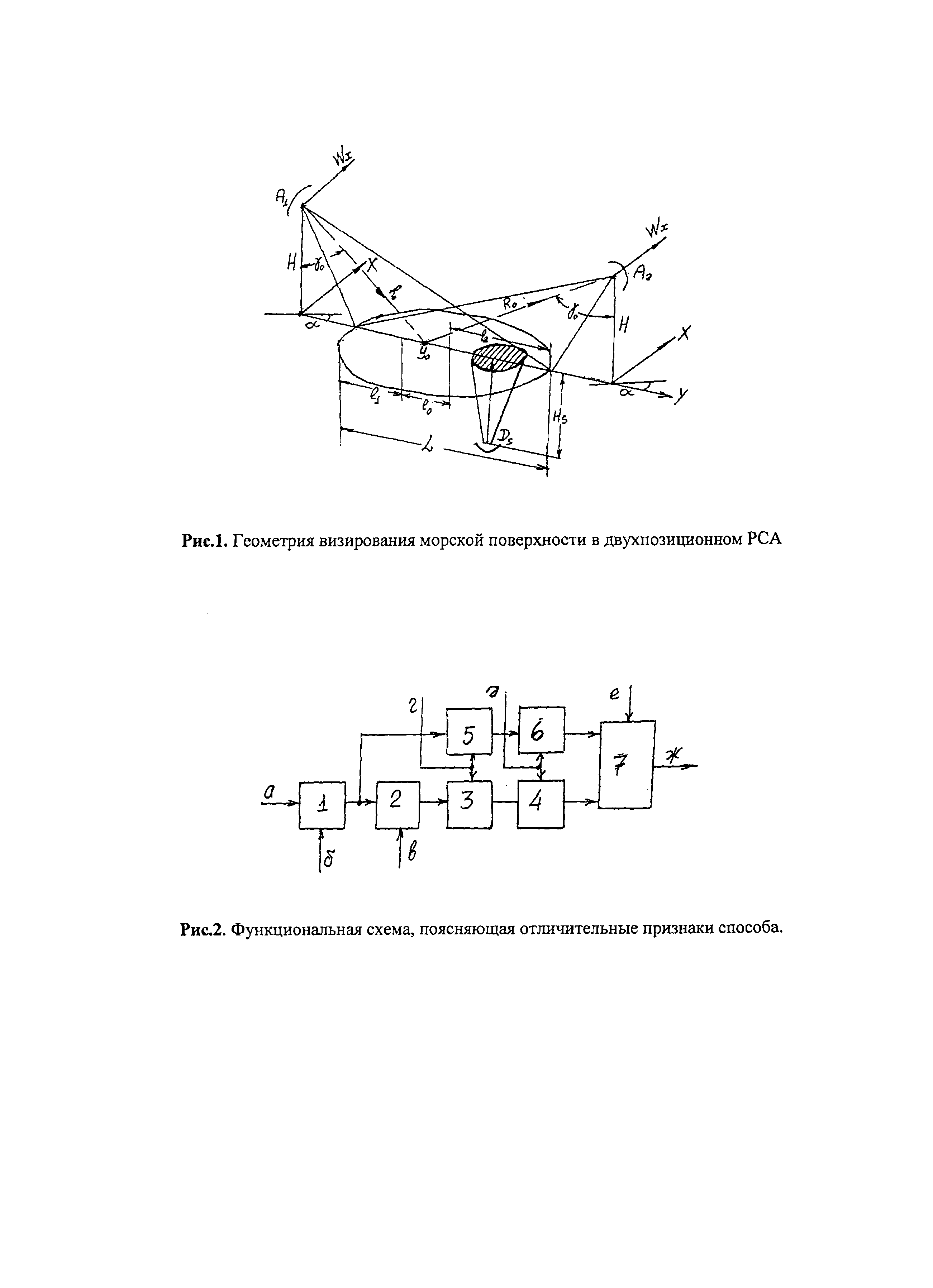
Способ измерения радиальной скорости отражателя в радиолокаторе бокового обзора с синтезированной апертурой
Способ измерения векторного поля скорости океанских и речных течений в космическом рса
Способ измерения вектора скорости локальных отражателей в космическом рса
Способ идентификации подводного гидродинамического источника по скоростному радиолокационному изображению морской поверхности

