Результат интеллектуальной деятельности: СКВАЖИННАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ КОМПЕНСАЦИИ УСИЛИЙ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
[1] Данная заявка относится к способам и системам позиционирования и управления скоростью движения рабочей колонны в скважине.
[2] При выполнении работ в нефтяных и газовых скважинах длинные колонны трубчатых элементов (например, труб и гибких насосно-компрессорных труб), называемые рабочими колоннами, вставляют в скважины и удаляют из скважин в различные периоды времени. Когда рабочие колонны, состоящие из труб, вставляют в скважину, трубу прикрепляют к верхней части рабочей колонны, а затем рабочую колонну спускают вглубь скважины. Когда рабочие колонны, состоящие из труб, извлекают из скважины, трубчатый элемент убирают с верхней части рабочей колонны, а затем рабочую колонну поднимают из скважины. В зависимости от глубины скважины рабочая колонна может быть длиной во много сотен метров.
[3] В некоторых случаях спаренные системы подъема используют для манипулирования рабочей колонной при спуске в ствол скважины и подъеме из ствола скважины с применением автоматического управления. Это означает, что в некоторых случаях положение и скорость, связанные с перемещением рабочей колонны вверх или вниз по стволу скважины для ввода или удаления рабочей колонны, автоматически контролируются спаренной системой подъема. Обычные спаренные системы подъема связаны с положением и движением рабочей колонны на поверхности, откуда рабочую колонну вводят в ствол скважины или куда рабочую колонну извлекают из ствола скважины, и, как предполагают, то же самое происходит в скважине без изменения длины рабочей колонны.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[4] Следующие фигуры включены для иллюстрации определенных аспектов вариантов реализации изобретения и не должны рассматриваться как исключительные варианты реализации изобретения. Раскрытый объект изобретения способен к значительным модификациям, изменениям, комбинациям и эквивалентам по форме и функциям, что будет понятно специалистам в данной области техники, получающим пользу от данного раскрытия изобретения.
[5] На фиг. 1 проиллюстрирована схема скважинной системы, в которой реализован скважинный контроллер положения и скорости.
[6] На фиг. 2А проиллюстрирована приведенная в качестве примера вычислительная структура скважинного контроллера положения и скорости, соединенного с контроллером рабочей колонны.
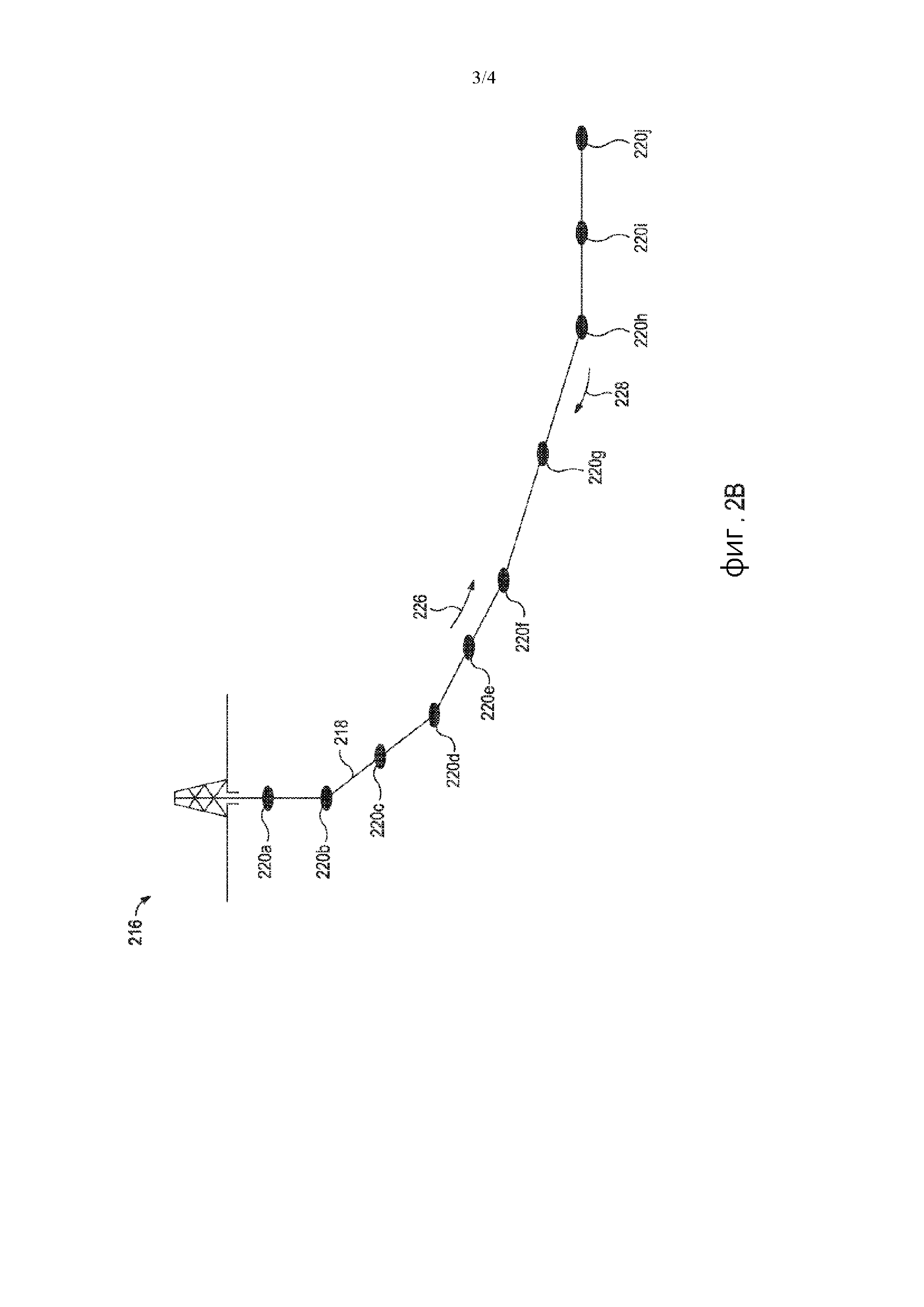
[7] На фиг. 2В наглядно проиллюстрировано, как динамическая модель выполняет приблизительный расчет рабочей колонны в виде набора взаимосвязанных точечных сосредоточенных масс.
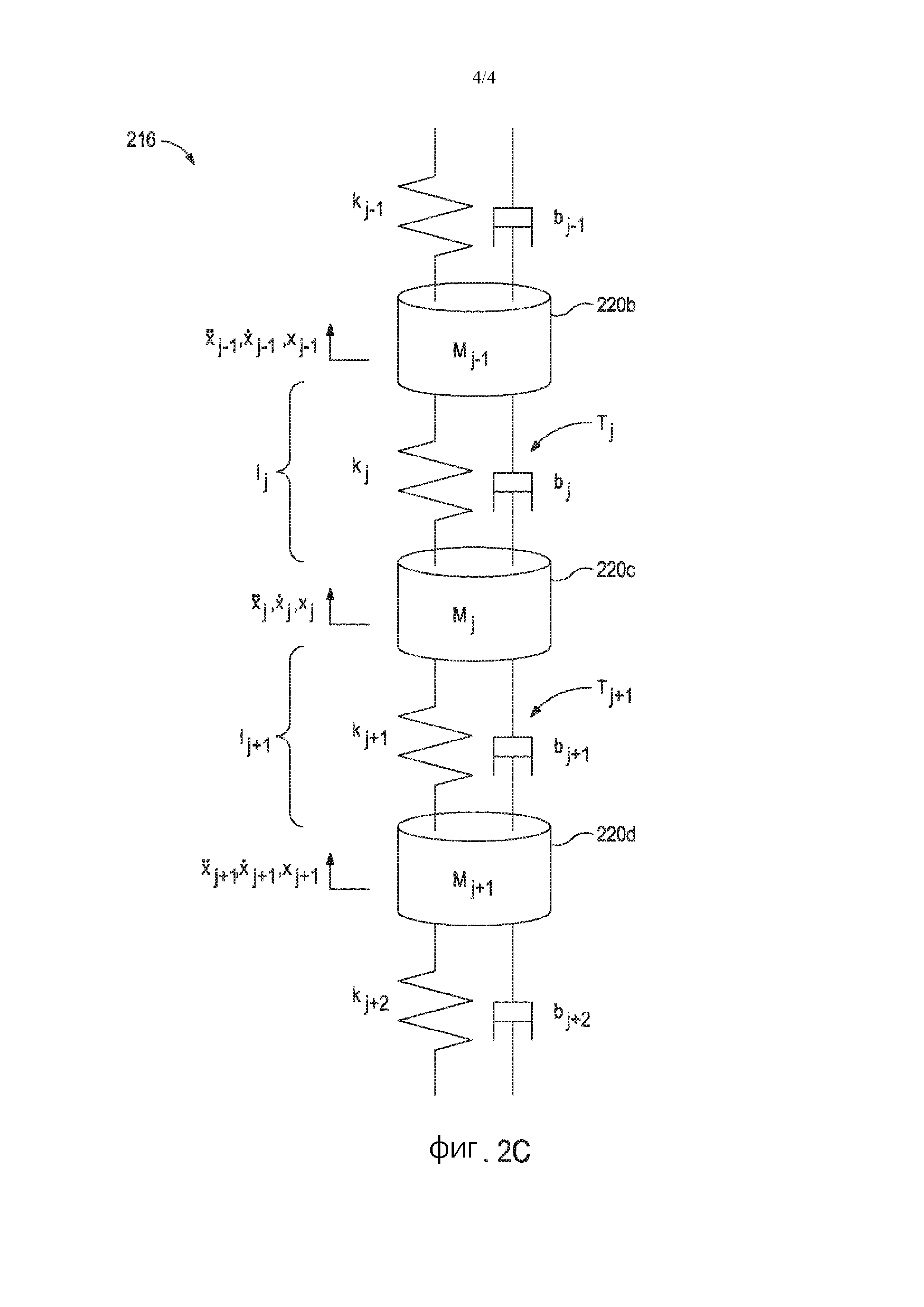
[8] На фиг. 2C наглядно проиллюстрировано, как динамическая модель выполняет математический приблизительный расчет рабочей колонны как набор взаимосвязанных точечных сосредоточенных масс.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[9] Данная заявка относится к способам и системам позиционирования и управления скоростью рабочей колонны в скважине с использованием скважинного контроллера положения и скорости, который учитывает компенсацию усилий.
[10] В некоторых случаях рабочая колонна может претерпевать значительные изменения длины, такие как тепловое расширение и удлинение или сжатие из-за инерционных сил, собственного веса и давления в стволе скважины. Кроме того, скважинные условия (например, температура, внутренние силы, собственный вес и давление в стволе скважины) могут вызвать перегрузку рабочей колонны и привести к ее повреждению в случае быстрых или внезапных манипуляций. Динамическая модель, реализованная с помощью скважинного контроллера положения и скорости в соответствии с данным изобретением, учитывает силы в скважине, испытываемые рабочей колонной из-за скважинных условий, чтобы обеспечить процессы изменения положения и скорости, которые должны происходить на поверхности, для достижения требуемых процессов изменения положения и скорости в скважине.
[11] На фиг. 1 проиллюстрирована схема скважинной системы 100, в которой реализован скважинный контроллер положения и скорости в соответствии с данным изобретением. Как проиллюстрировано, скважинная система 100 может содержать установку 102 для ремонта скважины (также именуемую «буровой вышкой»), которая расположена на поверхности 104 геологической среды и проходит поверх и вокруг ствола 106 скважины, который проникает в подземный пласт 108. Установка 102 для ремонта скважины может быть буровой установкой, передвижной установкой для заканчивания скважины, установкой для капитального ремонта скважины или тому подобным. В некоторых вариантах реализации изобретения установка 102 для ремонта скважины может не использоваться и заменена стандартной надводной устьевой компоновкой или установкой, не выходя за рамки объема изобретения. Хотя скважинная система 100 проиллюстрирована как система для осуществления наземных операций, следует понимать, что принципы данного раскрытия изобретения могут в равной степени применяться в любом морском или подводном применении, в котором установка 102 для ремонта скважины может быть плавучей платформой или подземной устьевой установкой, как известно в данной области техники.
[12] Ствол 106 скважины может быть пробурен в подземном пласте 108 с помощью любого подходящего метода бурения и может проходить, по существу, в вертикальном направлении от поверхности 104 геологической среды над вертикальной частью 110 ствола скважины. В некоторой точке в стволе 106 скважины вертикальная часть 110 ствола скважины может отклоняться от вертикали относительно поверхности 104 геологической среды и переходить, по существу, в горизонтальную часть 112 ствола скважины, хотя такое отклонение не является обязательным. То есть ствол 106 скважины может быть вертикальным, горизонтальным или отклоненным, не выходя за рамки объема данного изобретения. В некоторых вариантах реализации изобретения может быть выполнено заканчивание ствола 106 скважины путем цементирования колонны 114 обсадных труб внутри ствола 106 скважины вдоль всего ствола скважины или его части. Используемый в данном документе термин «обсадная колонна» или «колонна обсадных труб» относится не только к обсадной колонне, общеизвестной в данной области техники, но и к потайной обсадной колонне в стволе скважины, которая содержит секции трубчатых элементов, соединенные друг с другом, но не проходящие к поверхности. Тем не менее, в других вариантах реализации изобретения колонна 114 обсадных труб может не использоваться во всем стволе 106 скважины или в его части, и принципы данного изобретения могут в равной степени применяться к среде «необсаженного ствола скважины».
[13] Скважинная система 100 может дополнительно содержать инструмент 116, который может транспортироваться в ствол 106 скважины на рабочей колонне 118 (также называемой «средством для транспортировки»), которая проходит от установки 102 для ремонта скважины. Рабочей колонной 118 может быть, но не ограничиваясь этим, каротажный кабель, гибкие насосно-компрессорные трубы, бурильная труба, эксплуатационная труба, тросовая проволока, электрический кабель или тому подобное. Рабочая колонна 118 соединена с инструментом 120 для позиционирования (например, спаренная система подъема) для автоматического управления скоростью и перемещением положения рабочей колонны 118. Инструмент 120 для позиционирования соединен с возможностью связи (проводной или беспроводной) с контроллером 122 инструмента для позиционирования, который посылает сигналы, которые управляют инструментом 120 для позиционирования. Контроллер 122 инструмента для позиционирования содержит скважинный контроллер положения и скорости в соответствии с данным раскрытием изобретения, описанный далее в соответствии с фиг. 2A-2C.
[14] Скважинная система 100 может содержать поверхностные датчики 124, которые измеряют характеристики поверхностных условий (например, состояние рабочей колонны, давление в стволе скважины, температуру в стволе скважины и т.п.) на или возле (например, в пределах 30 метров (100 футов)) поверхности 104 (которая в применении на прибрежном шельфе будет находиться на или возле поверхности морского дна). Поверхностные датчики 124 могут быть расположены в разных местах. Например, поверхностный датчик 124a соединен с рабочей колонной 118 на поверхности 104, поверхностный датчик 124b соединен с частью установки 102 для ремонта скважины, и поверхностный датчик 124c соединен с рабочей колонной 118 вблизи поверхности 104. В некоторых случаях скважинная система 100 может содержать один или более датчиков, которые расположены внутри скважинной системы 100 как соединенные с рабочей колонной 118 на или вблизи поверхности 104, соединенные с обсадной колонной на или вблизи поверхности 104, соединенные с частью установки 102 для ремонта скважины или в комбинации вышеуказанных местоположений.
[15] Поверхностный датчик 124 могут использовать для измерения одной или более характеристик поверхностных условий, которые могут включать, но не ограничиваются ими, состояние рабочей колонны, давление в стволе скважины, температуру в стволе скважины и любую их комбинацию. Приведенные в качестве примера состояния рабочей колонны могут включать, но не ограничиваются ими, деформацию рабочей колонны 118, крутящий момент, прилагаемый к рабочей колонне 118, скорость вращения рабочей колонны 118, ускорение и/или скорость перемещения рабочей колонны 118 при ее вводе в ствол скважины, положение рабочей колонны 118, силу, прилагаемую для перемещения рабочей колонны 118 вдоль ствола скважины, и т.п., а также любую их комбинацию. Приведенные в качестве примера поверхностные датчики 124 могут включать, но не ограничиваются ими, тензодатчики, датчики ускорения, датчики положения, датчики усилия, датчики давления, датчики температуры и т.п.и любую их комбинацию.
[16] Скважинная система 100 может дополнительно содержать скважинные датчики 126, которые измеряют характеристики скважинных условий, которые могут включать, но не ограничиваются этим, деформацию рабочей колонны 118, крутящий момент, приложенный к рабочей колонне 118, скорость вращения рабочей колонны 118, ускорение и/или скорость перемещения рабочей колонны 118, вводимой в ствол скважины, положение рабочей колонны 118, усилие, прикладываемое для перемещения рабочей колонны 118 вдоль ствола скважины, температуру флюида в стволе 106 скважины, давление флюида в стволе 106 скважины и т.п. и любую их комбинацию. Скважинные датчики 126 могут быть расположены в самых разнообразных местах. Например, скважинный датчик 126а соединен с рабочей колонной 118, скважинный датчик 126b соединен с обсадной колонной (или другой потайной обсадной колонной вдоль ствола скважины), и скважинный датчик 126 с соединен с инструментом 116. В некоторых случаях скважинная система 100 может содержать один или более датчиков, которые расположены внутри скважинной системы 100 как соединенный с рабочей колонной 118, соединенные с обсадной колонной, соединенные с инструментом, который соединен с рабочей колонной 118, или в комбинации вышеупомянутых местоположений. Приведенные в качестве примера скважинные датчики 126 могут включать, но не ограничиваются ими, тензодатчики, датчики ускорения, датчики положения, датчики усилия, датчики давления, датчики температуры и тому подобное, а также любую их комбинацию.
[17] Поверхностные датчики 124 и скважинные датчики 126 могут быть соединены с возможностью связи (проводной или беспроводной) с контроллером 122 инструмента для позиционирования, так что контроллер 122 инструмента для позиционирования принимает сигналы от поверхностных датчиков 124 и скважинных датчиков 126, измеряющих характеристики поверхностных условий или скважинных условий, которые измеряет соответствующий датчик.
[18] На фиг. 2А проиллюстрирована приведенная в качестве примера вычислительная структура (т.е., конструкция и взаимосвязь между алгоритмами, модулями, компонентами и т.д.) контроллера инструмента для позиционирования (например, контроллера 122 инструмента для позиционирования в соответствии с фиг. 1), который включает скважинный контроллер 200 положения и скорости и контроллер 202 рабочей колонны. Скважинный контроллер 200 положения и скорости содержит четыре подсистемы: модуль 204 наблюдения, модуль 206 оценки профиля усилия, модуль 208 планирования скорости и контроллер 210. Эти подсистемы работают вместе для генерирования команд для контроллера 202 рабочей колонны.
[19] Модуль 204 наблюдения принимает входные данные 212 колонны скважинных труб, которые могут включать, но не ограничиваются ими, механические свойства колонны скважинных труб, геометрию ствола скважины, расположение колонны скважинных труб (или ее участков) в стволе скважины, измеренные поверхностные условия, измеренные скважинные условия и т.п., а также любую их комбинацию. Модуль 204 наблюдения также непрерывно принимает команду 214 ( ) усилия на подвижную головку от контроллера 202 рабочей колонны. Модуль 204 наблюдения использует и поддерживает или иным образом обновляет динамическую модель 216 рабочей колонны. Используемый в данном документе термин «усилие на подвижную головку» относится к усилию, прилагаемому к подвижной головке двигателем.
) усилия на подвижную головку от контроллера 202 рабочей колонны. Модуль 204 наблюдения использует и поддерживает или иным образом обновляет динамическую модель 216 рабочей колонны. Используемый в данном документе термин «усилие на подвижную головку» относится к усилию, прилагаемому к подвижной головке двигателем.
[20] На фиг. 2B-2C, которые более подробно описаны ниже, проиллюстрирован один вариант реализации динамической модели 216. На фиг. 2В наглядно проиллюстрировано, как динамическая модель 216 выполняет приблизительный расчет рабочей колонны 218 в виде набора взаимосвязанных точечных сосредоточенных масс 220a-220j.
[21] Снова в соответствии с фиг. 2A, модуль 206 оценки профиля усилия обеспечивает модуль 204 наблюдения точечными силами трения ( ) 222, связанными с точечными сосредоточенными массами 220a-220j динамической модели 216. Динамическая модель 216 модуля 204 наблюдения использует вышеупомянутые входные данные 212, 214, 222 для расчета алгоритма числового решения для определенного набора дифференциальных уравнений, который дает выходные данные 224 для текущего расчетного положения (
) 222, связанными с точечными сосредоточенными массами 220a-220j динамической модели 216. Динамическая модель 216 модуля 204 наблюдения использует вышеупомянутые входные данные 212, 214, 222 для расчета алгоритма числового решения для определенного набора дифференциальных уравнений, который дает выходные данные 224 для текущего расчетного положения ( ) и расчетной скорости (
) и расчетной скорости ( ) для каждой из точечных сосредоточенных масс 220a-220j. Затем расчетное положение и скорость каждой из точечных сосредоточенных масс 220a-220j сопоставляется с фактическим положением и скоростью рабочей колонны 218. Когда рабочая колонна 218 транспортируется вдоль ствола скважины, блок наблюдения 204 может повышать (при перемещении в направлении 226 вниз по стволу скважины в соответствии с фиг. 2B) или понижать (при перемещении в направлении 228 вверх по стволу скважины в соответствии с фиг. 2B) количество точечных сосредоточенных масс 220a-220j динамической модели 216 для поддержания оптимальной точности выходных данных 224 оценки положения и скорости или может изменять свойства масс, чтобы учесть изменения длины рабочей колонны.
) для каждой из точечных сосредоточенных масс 220a-220j. Затем расчетное положение и скорость каждой из точечных сосредоточенных масс 220a-220j сопоставляется с фактическим положением и скоростью рабочей колонны 218. Когда рабочая колонна 218 транспортируется вдоль ствола скважины, блок наблюдения 204 может повышать (при перемещении в направлении 226 вниз по стволу скважины в соответствии с фиг. 2B) или понижать (при перемещении в направлении 228 вверх по стволу скважины в соответствии с фиг. 2B) количество точечных сосредоточенных масс 220a-220j динамической модели 216 для поддержания оптимальной точности выходных данных 224 оценки положения и скорости или может изменять свойства масс, чтобы учесть изменения длины рабочей колонны.
[22] На фиг. 2С наглядно проиллюстрировано, как динамическая модель 216 выполняет математический приблизительный расчет рабочей колонны 218 в виде набора взаимосвязанных точечных сосредоточенных масс 220a-220j. Нижний индекс j используется для идентификации представляющей интерес текущей точечной сосредоточенной массы (например, 220c) для следующих уравнений движения, в то время как нижние индексы j+1, j-1, и т.д. используются для определения точечной сосредоточенной массы, одного положения в скважине (например, 220d), одного положения вверх по стволу скважины (например, 220b) и т.д. текущей точечной сосредоточенной массы (например, 220c). Кроме того, количество точечных надбуквенных знаков для того или иного члена уравнения указывает порядок производной. Например, одноточечный надбуквенный знак (например,  ) указывает первую производную члена уравнения, двухточечный надбуквенный знак (например,
) указывает первую производную члена уравнения, двухточечный надбуквенный знак (например,  ) указывает вторую производную и так далее.
) указывает вторую производную и так далее.
[23] Уравнение (1) предоставляет приведенное в качестве примера уравнение движения для j-й массы, которая, как проиллюстрировано, является массой 220с.
|















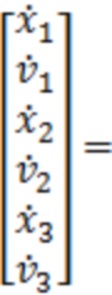
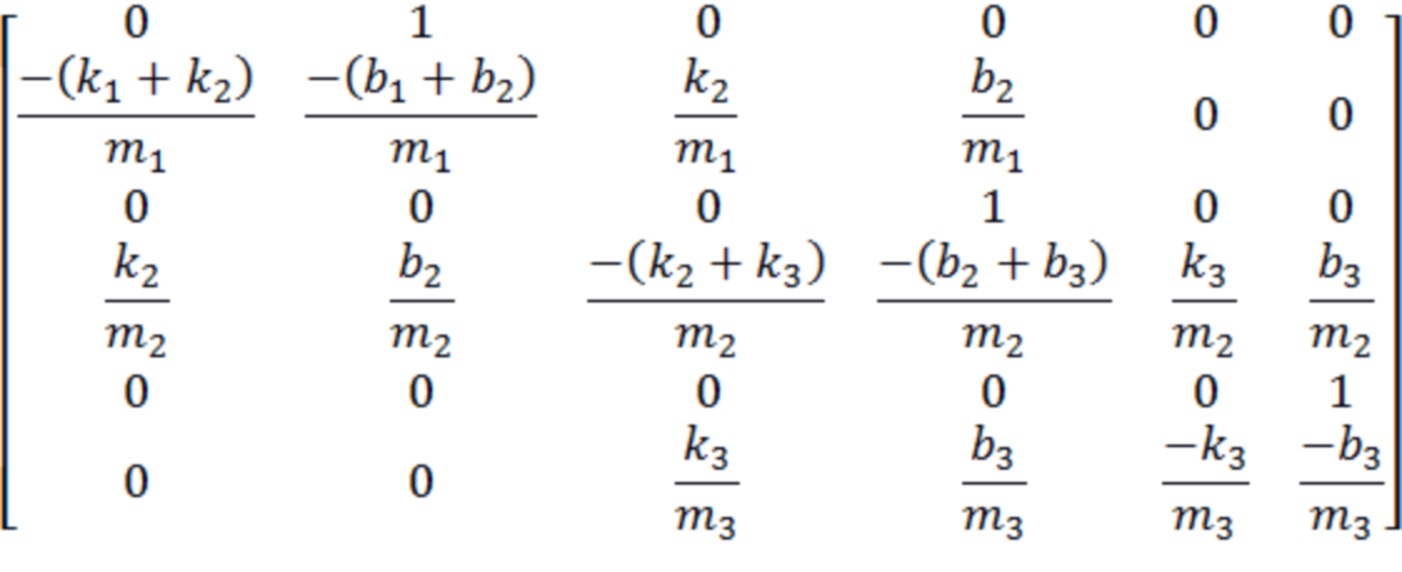
[24] Для системы с 3 массами, как проиллюстрировано на фиг. 2C, скорость ( ) j-й массы 220c равна первой производной смещения, как определено в уравнении (5), которое производит матрицы в уравнении (6).
) j-й массы 220c равна первой производной смещения, как определено в уравнении (5), которое производит матрицы в уравнении (6).
|
|
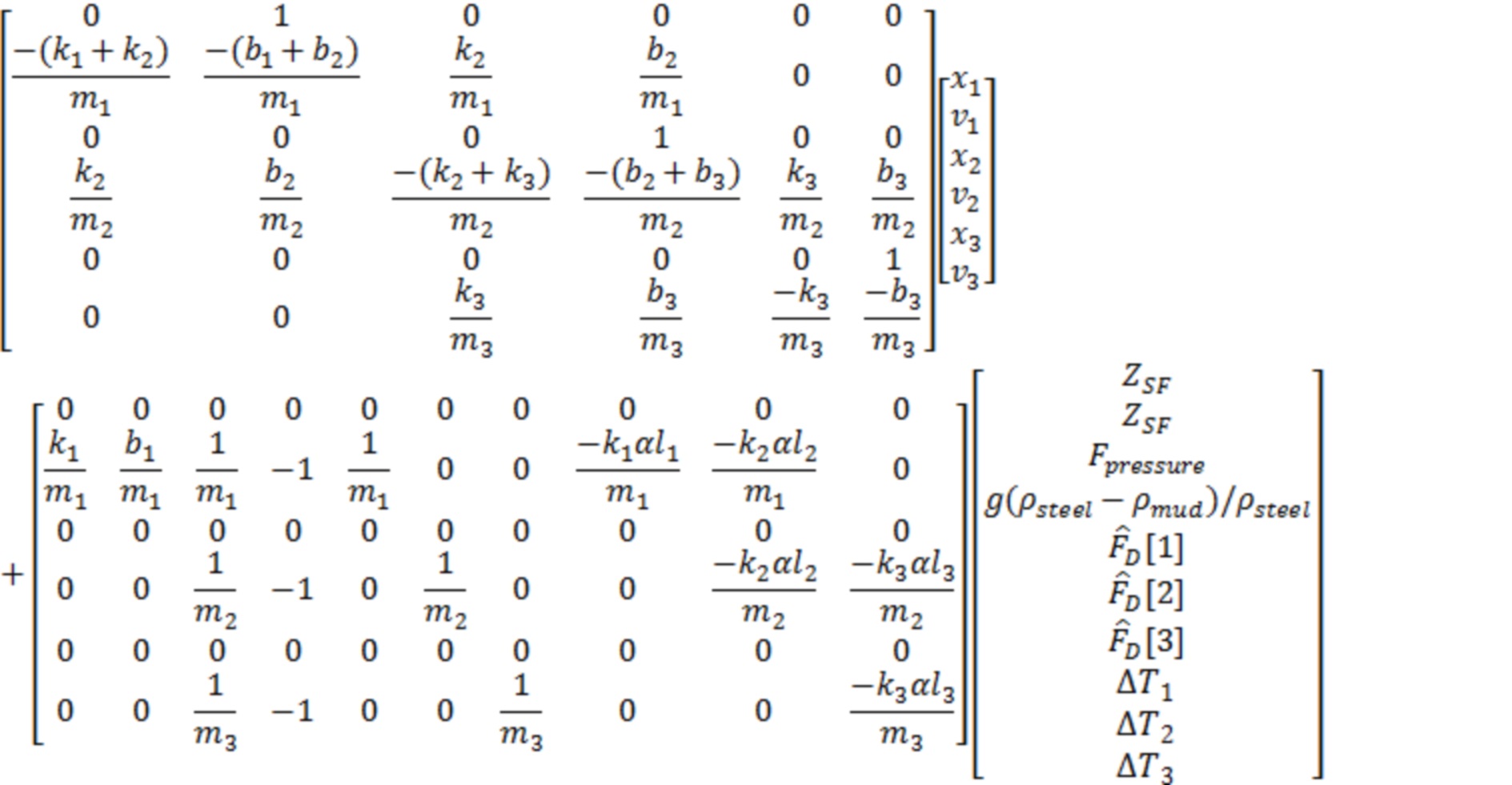
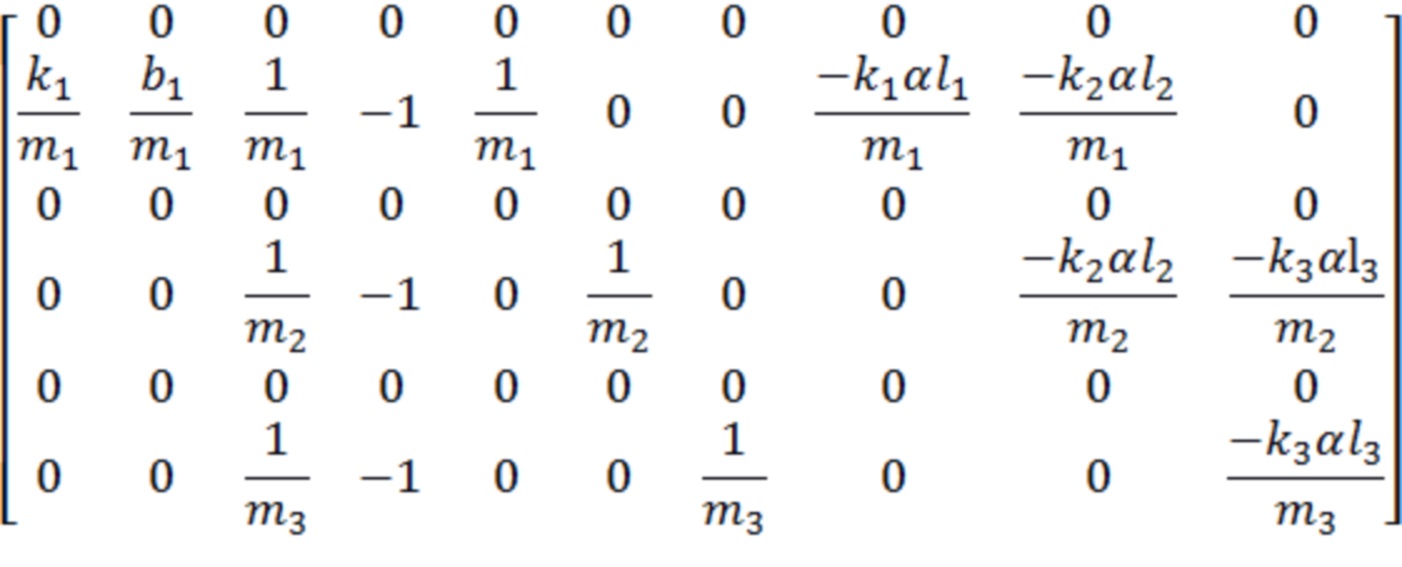
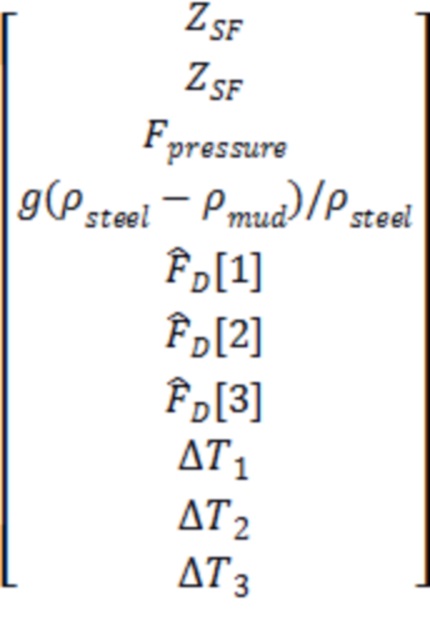
[25] Сила, прилагаемая системой ( ) инструмента для позиционирования, может быть связана с переменными состояния и вводными значениями 212, 214, 222 по уравнению (7).
) инструмента для позиционирования, может быть связана с переменными состояния и вводными значениями 212, 214, 222 по уравнению (7).
|
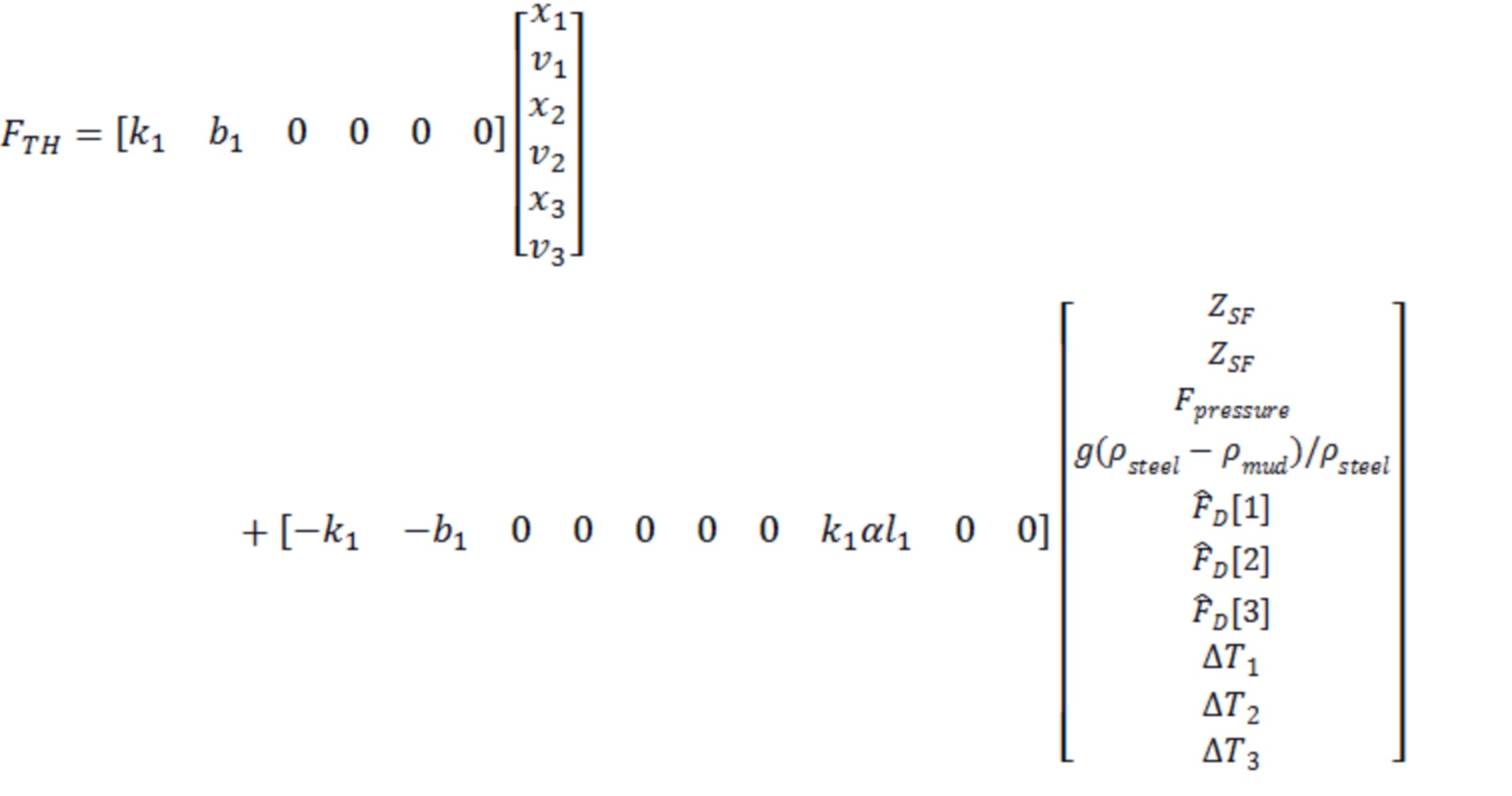
[26] Для ясности каждая из вышеупомянутых матриц сокращена, как показано в Таблице 1, которая допускает сведение уравнений (6) и (7) к уравнениям (8) и (9).
Таблица 1
|


|
[27] С учетом команды усилия на подвижную головку () в качестве измеренной (), можно построить наблюдателя полного состояния в соответствии с уравнением (10).
|




[28] В динамической модели 216 для повышения надежности работы модуля 204 наблюдения по отношению к шуму поверхностного датчика, шуму скважинного датчика (при условии реализации скважинных датчиков) и шуму технологической среды (или модели) могут использовать фильтр Калмана.
[29] Снова в соответствии с фиг. 2A, модуль 206 оценки профиля усилия принимает выходные данные 224 (т.е. расчетное положение (), расчетную скорость () и массу ( ) для каждой из точечных сосредоточенных масс 220a-220j из уравнения (1) от модуля 204 наблюдения). Модуль 206 оценки профиля усилия также получает или иным образом принимает значение распределения усилия (
) для каждой из точечных сосредоточенных масс 220a-220j из уравнения (1) от модуля 204 наблюдения). Модуль 206 оценки профиля усилия также получает или иным образом принимает значение распределения усилия ( ) 230 подвижной головки от контроллера 202 рабочей колонны. Модуль 206 оценки профиля усилия фиксирует возмущающие силы трения и сосредоточенные силы трения, связанные с каждой глубиной, при спуске рабочей колонны в течение первого отрезка времени определенной работы по обслуживанию конкретной скважины. Затем эти данные используют для прогнозирования тренда силы трения при последующем перемещении через отметку той же глубины. Более конкретно, модуль 206 оценки профиля усилия оценивает эквивалентные силы трения (
) 230 подвижной головки от контроллера 202 рабочей колонны. Модуль 206 оценки профиля усилия фиксирует возмущающие силы трения и сосредоточенные силы трения, связанные с каждой глубиной, при спуске рабочей колонны в течение первого отрезка времени определенной работы по обслуживанию конкретной скважины. Затем эти данные используют для прогнозирования тренда силы трения при последующем перемещении через отметку той же глубины. Более конкретно, модуль 206 оценки профиля усилия оценивает эквивалентные силы трения ( ) для каждой из точечных сосредоточенных масс 220a-220j динамической модели 216, используя распределения силы () 230 подвижной головки, и оценивает напряжения участков рабочей колонны, которые представлены точечными сосредоточенными массами 220a-220j (которые также называются профилем (
) для каждой из точечных сосредоточенных масс 220a-220j динамической модели 216, используя распределения силы () 230 подвижной головки, и оценивает напряжения участков рабочей колонны, которые представлены точечными сосредоточенными массами 220a-220j (которые также называются профилем ( )) напряжения колонны, используя выходные данные 224 от модуля 204 наблюдения.
)) напряжения колонны, используя выходные данные 224 от модуля 204 наблюдения.
[30] Модуль 206 оценки профиля усилия предоставляет выходные данные 230, которые включают данные о профиле () напряжения колонны и прогнозируемую возмущающую силу трения ( ), модулю 208 планирования скорости и предоставляет выходные данные 222, которые включают данные о точечных силах трения (), модулю наблюдения, как описано выше.
), модулю 208 планирования скорости и предоставляет выходные данные 222, которые включают данные о точечных силах трения (), модулю наблюдения, как описано выше.
[31] Модуль 208 планирования скорости принимает дискретную последовательность требуемых команд положения ( ) и скорости (
) и скорости ( ) в скважине, необходимых для операций, выполняемых в стволе скважины. Команды и предоставляются операторами скважины или связанного компьютера или модели. Затем модуль 208 планирования скорости рассчитывает требуемые сигналы положения (
) в скважине, необходимых для операций, выполняемых в стволе скважины. Команды и предоставляются операторами скважины или связанного компьютера или модели. Затем модуль 208 планирования скорости рассчитывает требуемые сигналы положения ( ) в скважине и требуемые сигналы скорости (
) в скважине и требуемые сигналы скорости ( ) в скважине, чтобы реализовать заданные командами положения и ускорения без нарушения безопасных уровней напряжения рабочей колонны. Рассчитанные и для достижения заданных командами положений являются выходными данными 232 модуля 208 планирования скорости, которые принимаются контроллером 210.
) в скважине, чтобы реализовать заданные командами положения и ускорения без нарушения безопасных уровней напряжения рабочей колонны. Рассчитанные и для достижения заданных командами положений являются выходными данными 232 модуля 208 планирования скорости, которые принимаются контроллером 210.
[32] Затем прогнозируемую возмущающую силу трения ( ) могут необязательно использовать для сглаживания характеристики приложенной силы в скважине, чтобы избежать перегрузки рабочей колонны. Использование прогнозируемой возмущающей силы в контроллере 202 рабочей колонны в качестве сигнала 234 положительной обратной связи может уменьшить характеристику прихвата/проскальзывания, которая вызывает колебания силы в скважине и приводит к преждевременному выходу из строя. В некоторых случаях модуль 208 планирования скорости может замедлить движение рабочей колонны, если возмущение демонстрирует растущую тенденцию характеристики прихвата/проскальзывания, которую сложно контролировать или оценивать. Отфильтрованная прогнозируемая возмущающая сила добавляется в модуль 204 наблюдения с положительной обратной связью в качестве части команды 214 () усилия на подвижную головку контроллера 202 рабочей колонны.
) могут необязательно использовать для сглаживания характеристики приложенной силы в скважине, чтобы избежать перегрузки рабочей колонны. Использование прогнозируемой возмущающей силы в контроллере 202 рабочей колонны в качестве сигнала 234 положительной обратной связи может уменьшить характеристику прихвата/проскальзывания, которая вызывает колебания силы в скважине и приводит к преждевременному выходу из строя. В некоторых случаях модуль 208 планирования скорости может замедлить движение рабочей колонны, если возмущение демонстрирует растущую тенденцию характеристики прихвата/проскальзывания, которую сложно контролировать или оценивать. Отфильтрованная прогнозируемая возмущающая сила добавляется в модуль 204 наблюдения с положительной обратной связью в качестве части команды 214 () усилия на подвижную головку контроллера 202 рабочей колонны.
[33] Контроллер 210 использует подходящий алгоритм управления (такой как алгоритм пропорционально-интегрально-дифференциального регулирования), чтобы рассчитать положение ( ) на поверхности и скорость (
) на поверхности и скорость ( ) на поверхности, необходимые для получения требуемых положения () и скорости () в скважине. Величины и представляют собой выходные данные 236 скважинного контроллера 200 положения и скорости через контроллер 210, которые принимаются контроллером 202 рабочей колонны.
) на поверхности, необходимые для получения требуемых положения () и скорости () в скважине. Величины и представляют собой выходные данные 236 скважинного контроллера 200 положения и скорости через контроллер 210, которые принимаются контроллером 202 рабочей колонны.
[34] Контроллер 202 рабочей колонны использует различные выходные данные, полученные от скважинного контроллера 200 положения и скорости (например, выходные сигналы 236 в отношении и от контроллера 210 и прогнозируемую возмущающую силу трения () от модуля 208 планирования скорости) в качестве входных данных для управления перемещением и положением рабочей колонны с помощью набора команд положения на поверхности () и набора команд () 238 скорости на поверхности, которые передаются в инструмент для позиционирования, управляющий движением и силой на поверхности (например, спаренной системы подъема).
[35] На фиг. 2A-2C и в соответствующем описании приведены примеры способа, вычислительной структуры и алгоритмов для выполнения вариантов реализации данного изобретения. В некоторых случаях могут использоваться другие алгоритмы или вычислительные структуры, которые учитывают компенсацию усилия при определении выходные данных 236 о положении ( ) и скорости (
) и скорости ( ) на поверхности скважинного контроллера 200 положения и скорости.
) на поверхности скважинного контроллера 200 положения и скорости.
[36] Следует признать, что различные варианты реализации изобретения в данном документе, относящиеся к системам управления, компьютерному управлению и анализу, включая различные блоки, модули, элементы, компоненты, способы и алгоритмы, могут быть реализованы с помощью компьютерного аппаратного обеспечения, программного обеспечения, их комбинаций и тому подобного. Чтобы проиллюстрировать эту взаимозаменяемость аппаратного и программного обеспечения, различные приведенные в качестве примера блоки, модули, элементы, компоненты, способы и алгоритмы описаны в целом с точки зрения их функциональных возможностей. То, будут ли такие функциональные возможности реализованы в виде аппаратного или программного обеспечения, будет зависеть от конкретного применения и любых наложенных конструктивных ограничений. По меньшей мере по этой причине следует признать, что специалист в данной области техники может реализовать описанные функциональные возможности различными способами в случае конкретного применения. Кроме того, различные компоненты и блоки, например, могут быть расположены в другом порядке или разделены по-разному без отклонения от объема четко описанных вариантов реализации изобретения.
[37] Компьютерное аппаратное обеспечение, используемое для реализации различных приведенных в качестве примера блоков, модулей, элементов, компонентов, способов и алгоритмов, описанных в данном документе, может содержать процессор, выполненный с возможностью выполнения одной или более последовательностей команд, позиций программирования или кода, хранимого на энергонезависимом машиночитаемом носителе данных. Процессор может быть, например, микропроцессором общего назначения, микроконтроллером, процессором для цифровой обработки сигналов, специализированной интегральной схемой, программируемой пользователем вентильной матрицей, программируемым логическим устройством, контроллером, машиной состояний, стробированной логикой, дискретными аппаратными компонентами, искусственной нейронной сетью или любым подобным подходящим объектом, который может выполнять расчеты или другие манипуляции с данными. В некоторых вариантах реализации изобретения компьютерное аппаратное обеспечение может дополнительно содержать такие элементы, как, например, память (например, оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ)), регистры, жесткие диски, съемные диски, CD-ROM, DVD или любые другие подобные устройства хранения информации или носители.
[38] Выполняемые последовательности, описанные в данном документе, могут быть реализованы с одной или более последовательностями кода, содержащимися в памяти. В некоторых вариантах реализации изобретения такой код может считываться в память с другого машиночитаемого носителя. Выполнение последовательностей команд, содержащихся в памяти, может предписать процессору выполнение этапов процесса, описанных в данном документе. Один или более процессоров в многопроцессорной схеме также могут использоваться для выполнения последовательностей команд в памяти. Кроме того, аппаратные схемы могут использоваться вместо программных команд или в сочетании с ними для реализации различных вариантов реализации изобретения, описанных в данном документе. Таким образом, настоящие варианты реализации изобретения не ограничены какой-либо конкретной комбинацией аппаратного и/или программного обеспечения.
[39] Используемый в данном документе термин «машиночитаемый носитель» относится к любому носителю, который прямо или косвенно предоставляет процессору команды для выполнения. Машиночитаемый носитель может принимать различные формы, включая, например, энергонезависимый носитель, энергозависимый носитель и средство передачи данных. Энергонезависимые носители могут включать в себя, например, оптические и магнитные диски. Энергозависимые носители могут включать в себя, например, динамическую память. Средство передачи данных может включать в себя, например, коаксиальные кабели, провода, волоконную оптику и провода, которые образуют шину. Обычные формы машиночитаемых носителей могут включать в себя, например, гибкие магнитные диски, гибкие диски, жесткие диски, магнитные ленты, другие подобные магнитные носители, CD-ROM, DVD, другие подобные оптические носители, перфокарты, бумажные ленты и подобные физические носители со структурированными отверстиями, ОЗУ, ПЗУ, ППЗУ, ЭППЗУ и флэш-ЭППЗУ.
[40] Варианты реализации изобретения, описанные в данном документе, включают Вариант реализации изобретения A, Вариант реализации изобретения B, Вариант реализации изобретения C, Вариант реализации изобретения D и Вариант реализации изобретения E.
[41] Вариант реализации изобретения A представляет собой способ, включающий: транспортировку рабочей колонны вдоль ствола скважины, проникающего в подземный пласт, с использованием инструмента для позиционирования, который управляет движением и усилием рабочей колонны на поверхности, причем инструмент для позиционирования соединен с контроллером; измерение характеристики поверхностного состояния, выбранной из группы, состоящей из состояния рабочей колонны, давления в стволе скважины, температуры в стволе скважины и любой их комбинации; моделирование буровой колонны скважин с помощью динамической модели посредством контроллера с использованием характеристики поверхностного состояния и геометрии ствола скважины в качестве входных данных динамической модели; расчет требуемого положения () в скважине и требуемой скорости () в скважине на основании динамической модели; и транспортировку рабочей колонны с помощью инструмента для позиционирования в местоположение и скоростью на поверхности на основании и . Необязательно, Вариант реализации изобретения A может дополнительно содержать одно или более из следующего: Элемент 1: отличающийся тем, что инструмент для позиционирования представляет собой спаренную систему подъема; Элемент 2: отличающийся тем, что состояние рабочей колонны выбирается из группы, состоящей из деформации рабочей колонны, крутящего момента, приложенного к рабочей колонне, скорости вращения рабочей колонны, ускорения движения рабочей колонны, перемещаемой в ствол скважины, скорости движения рабочей колонны, перемещаемой в ствол скважины, положения рабочей колонны, усилия, прикладываемого для перемещения рабочей колонны вдоль ствола скважины, и любой их комбинации; Элемент 3: способ, дополнительно включающий: измерение состояния в скважине с помощью скважинного датчика, расположенного в стволе скважины, при этом входные данные для динамической модели дополнительно включают состояние в скважине; Элемент 4: отличающийся тем, что моделирование колонны скважинных труб с помощью динамической модели включает оценку колонны скважинных труб в виде набора взаимосвязанных точечных сосредоточенных масс; Элемент 5: отличающийся тем, что контроллер включает скважинный контроллер положения и скорости и контроллер рабочей колонны, причем способ дополнительно включает: расчет команды () усилия на подвижную головку инструмента для позиционирования с помощью контроллера рабочей колонны; при этом расчет и также основан на и выполняется скважинным контроллером положения и скорости; расчет набора команд () позиционирования на поверхности и набора команд () скорости на поверхности на основании и с помощью контроллера рабочей колонны; и при этом транспортировка рабочей колонны с помощью инструмента для позиционирования осуществляется в соответствии с и ; Элемент 6: Элемент 5 и отличающийся тем, что скважинный контроллер положения и скорости содержит модуль наблюдения, модуль оценки профиля усилия, модуль планирования скорости и контроллер, и при этом расчет требуемого положения и скорости рабочей колонны в скважине, выполняемое скважинным контроллером положения и скорости, включает: расчет текущего расчетного положения () и расчетной скорости () с помощью модуля наблюдения на основании набора взаимосвязанных точечных сосредоточенных масс, состояния на поверхности и команды усилия на подвижную головку; расчет профиля () напряжения колонны и прогнозируемой силы трения () для рабочей колонны с помощью модуля оценки профиля усилия на основании и ; расчет и для рабочей колонны с помощью модуля планирования скорости на основании и ; расчет положения () на поверхности и скорости () на поверхности рабочей колонны с помощью контроллера для получения и ; преобразование и в набор команд () положения на поверхности и набор команд () скорости на поверхности; Элемент 7: отличающийся тем, что моделирование колонны скважинных труб включает моделирование движения j-го участка колонны скважинных труб в соответствии с уравнением (1); а также Элемент 8: отличающийся тем, что динамическая модель использует фильтр Калмана. Приведенные в качестве примера комбинации могут включать, но не ограничиваются ими, два или более Элементов 1-4 в сочетании; один или более Элементов 1-4 в сочетании с Элементом 5 и, необязательно, с Элементом 6; один или более Элементов 1-4 в сочетании с Элементом 7; один или более Элементов 1-4 в сочетании с Элементом 8; Элемент 8 в сочетании с Элементом 5 и, необязательно, с Элементом 6; Элемент 8 в сочетании с Элементом 7; а также два или более Элементов 5-8 в сочетании.
и . Необязательно, Вариант реализации изобретения A может дополнительно содержать одно или более из следующего: Элемент 1: отличающийся тем, что инструмент для позиционирования представляет собой спаренную систему подъема; Элемент 2: отличающийся тем, что состояние рабочей колонны выбирается из группы, состоящей из деформации рабочей колонны, крутящего момента, приложенного к рабочей колонне, скорости вращения рабочей колонны, ускорения движения рабочей колонны, перемещаемой в ствол скважины, скорости движения рабочей колонны, перемещаемой в ствол скважины, положения рабочей колонны, усилия, прикладываемого для перемещения рабочей колонны вдоль ствола скважины, и любой их комбинации; Элемент 3: способ, дополнительно включающий: измерение состояния в скважине с помощью скважинного датчика, расположенного в стволе скважины, при этом входные данные для динамической модели дополнительно включают состояние в скважине; Элемент 4: отличающийся тем, что моделирование колонны скважинных труб с помощью динамической модели включает оценку колонны скважинных труб в виде набора взаимосвязанных точечных сосредоточенных масс; Элемент 5: отличающийся тем, что контроллер включает скважинный контроллер положения и скорости и контроллер рабочей колонны, причем способ дополнительно включает: расчет команды () усилия на подвижную головку инструмента для позиционирования с помощью контроллера рабочей колонны; при этом расчет и также основан на и выполняется скважинным контроллером положения и скорости; расчет набора команд () позиционирования на поверхности и набора команд () скорости на поверхности на основании и с помощью контроллера рабочей колонны; и при этом транспортировка рабочей колонны с помощью инструмента для позиционирования осуществляется в соответствии с и ; Элемент 6: Элемент 5 и отличающийся тем, что скважинный контроллер положения и скорости содержит модуль наблюдения, модуль оценки профиля усилия, модуль планирования скорости и контроллер, и при этом расчет требуемого положения и скорости рабочей колонны в скважине, выполняемое скважинным контроллером положения и скорости, включает: расчет текущего расчетного положения () и расчетной скорости () с помощью модуля наблюдения на основании набора взаимосвязанных точечных сосредоточенных масс, состояния на поверхности и команды усилия на подвижную головку; расчет профиля () напряжения колонны и прогнозируемой силы трения () для рабочей колонны с помощью модуля оценки профиля усилия на основании и ; расчет и для рабочей колонны с помощью модуля планирования скорости на основании и ; расчет положения () на поверхности и скорости () на поверхности рабочей колонны с помощью контроллера для получения и ; преобразование и в набор команд () положения на поверхности и набор команд () скорости на поверхности; Элемент 7: отличающийся тем, что моделирование колонны скважинных труб включает моделирование движения j-го участка колонны скважинных труб в соответствии с уравнением (1); а также Элемент 8: отличающийся тем, что динамическая модель использует фильтр Калмана. Приведенные в качестве примера комбинации могут включать, но не ограничиваются ими, два или более Элементов 1-4 в сочетании; один или более Элементов 1-4 в сочетании с Элементом 5 и, необязательно, с Элементом 6; один или более Элементов 1-4 в сочетании с Элементом 7; один или более Элементов 1-4 в сочетании с Элементом 8; Элемент 8 в сочетании с Элементом 5 и, необязательно, с Элементом 6; Элемент 8 в сочетании с Элементом 7; а также два или более Элементов 5-8 в сочетании.
[42] Вариант реализации изобретения B представляет собой систему скважин, содержащую: рабочую колонну, проходящую в ствол скважины, проникающий в подземный пласт; инструмент для позиционирования, соединенный с рабочей колонной в местоположении на поверхности скважинной системы; поверхностный датчик, который измеряет характеристику поверхностного состояния, выбранную из группы, состоящей из состояния рабочей колонны, давления в стволе скважины, температуры в стволе скважины и любой их комбинации; контроллер, соединенный с возможностью связи с инструментом для позиционирования и поверхностным датчиком, при этом контроллер содержит энергонезависимый материальный машиночитаемый носитель данных, содержащий программу команд, которые предписывают компьютерной системе запуск программы команд для: осуществления Варианта реализации изобретения A необязательно с одним или более Элементами 1-8.
[43] Вариант реализации изобретения C представляет собой энергонезависимый материальный машиночитаемый носитель данных, содержащий программу команд, которая предписывает компьютерной системе запуск программы команд для: осуществления Варианта реализации изобретения A необязательно с одним или более Элементами 1-8.
[44] Вариант реализации изобретения D представляет собой скважинную систему, содержащую: рабочую колонну, проходящую в скважину, проникающую в подземный пласт; инструмент для позиционирования, соединенный с рабочей колонной в местоположении скважинной системы на поверхности; поверхностный датчик, который измеряет характеристику поверхностного состояния, выбранную из группы, состоящей из: состояния рабочей колонны, давления в стволе скважины, температуры в стволе скважины и любой их комбинации; контроллер, соединенный с возможностью связи с инструментом для позиционирования и поверхностным датчиком, при этом контроллер содержит энергонезависимый материальный машиночитаемый носитель данных, содержащий программу команд, которые предписывают компьютерной системе запуск программы команд для: моделирования колонны скважинных труб с помощью динамической модели посредством контроллера с использованием состояния на поверхности и геометрии ствола скважины в качестве входных данных динамической модели; расчета требуемого положения () в скважине и требуемой скорости () в скважине на основании динамической модели; и перевода рабочей колонны с помощью инструмента для позиционирования в положение и скорость на поверхности на основании и .
[45] Вариант реализации изобретения E является энергонезависимым материальным машиночитаемым носителем данных, содержащим программу команд, которые предписывают компьютерной системе запуск программы команд для: моделирования колонны скважинных труб с помощью динамической модели посредством контроллера с использованием состояния на поверхности и геометрии ствола скважины в качестве входных данных динамической модели; расчета требуемого положения () в скважине и требуемой скорости () в скважине на основании динамической модели; и перевода рабочей колонны с помощью инструмента для позиционирования в положение и со скоростью на поверхности на основании и .
[46] Варианты реализации изобретения D и E могут необязательно содержать одно или более из следующего: Элемент 9: отличающийся тем, что инструмент позиционирования представляет собой спаренную систему подъема; Элемент 10: отличающийся тем, что состояние рабочей колонны выбрано из группы, состоящей из: деформации рабочей колонны, крутящего момента, приложенного к рабочей колонне, скорости вращения рабочей колонны, ускорения движения рабочей колонны, перемещаемой в ствол скважины, скорости рабочей колонны, перемещаемой в ствол скважины, положения рабочей колонны, усилия, прикладываемого для перемещения рабочей колонны вдоль ствола скважины, и любой их комбинации; Элемент 11: отличающийся тем, что контроллер содержит: скважинный контроллер положения и скорости и контроллер рабочей колонны, а также программу команд, которые дополнительно предписывают компьютерной системе запуск программы команд для: расчета команды () усилия на подвижную головку инструмента для позиционирования с помощью контроллера рабочей колонны; при этом команда для расчета  и также основана на и выполняется скважинным контроллером положения и скорости; расчета набора команд () позиционирования на поверхности и набора команд () скорости на поверхности на основании и с помощью контроллера рабочей колонны; и команда для переноса рабочей колонны с помощью инструмента для позиционирования дается в соответствии с и ; Элемент 12: Элемент 11 и отличающийся тем, что скважинный контроллер положения и скорости содержит модуль наблюдения, модуль оценки профиля усилия, модуль планирования скорости и контроллер, и при этом команда для расчета требуемого положения и скорости рабочей колонны в скважине, выполняемого скважинным контроллером положения и скорости, включает: расчет текущего расчетного положения () и расчетной скорости () с помощью модуля наблюдения на основании набора взаимосвязанных точечных сосредоточенных масс, поверхностных условий и команды усилия на подвижную головку; расчет профиля () напряжения колонны и прогнозируемой силы трения () при возмущении для рабочей колонны с помощью модуля оценки профиля усилия на основании и ; расчет и для рабочей колонны с помощью модуля планирования скорости на основании и ; расчет положения () на поверхности и скорости () движения рабочей колонны на поверхности с помощью контроллера для получения и ; и преобразование и
и также основана на и выполняется скважинным контроллером положения и скорости; расчета набора команд () позиционирования на поверхности и набора команд () скорости на поверхности на основании и с помощью контроллера рабочей колонны; и команда для переноса рабочей колонны с помощью инструмента для позиционирования дается в соответствии с и ; Элемент 12: Элемент 11 и отличающийся тем, что скважинный контроллер положения и скорости содержит модуль наблюдения, модуль оценки профиля усилия, модуль планирования скорости и контроллер, и при этом команда для расчета требуемого положения и скорости рабочей колонны в скважине, выполняемого скважинным контроллером положения и скорости, включает: расчет текущего расчетного положения () и расчетной скорости () с помощью модуля наблюдения на основании набора взаимосвязанных точечных сосредоточенных масс, поверхностных условий и команды усилия на подвижную головку; расчет профиля () напряжения колонны и прогнозируемой силы трения () при возмущении для рабочей колонны с помощью модуля оценки профиля усилия на основании и ; расчет и для рабочей колонны с помощью модуля планирования скорости на основании и ; расчет положения () на поверхности и скорости () движения рабочей колонны на поверхности с помощью контроллера для получения и ; и преобразование и  в набор команд () позиционирования на поверхности и набор команд () скорости на поверхности; Элемент 13: отличающийся тем, что команда для моделирования колонны скважинных труб с помощью динамической модели в виде набора взаимосвязанных точечных сосредоточенных масс, учитывающего скважинные усилия, содержит команды для моделирования движения j-го участка колонны скважинных труб в соответствии с уравнением (1); а также Элемент 14: отличающийся тем, что команда для динамического моделирования колонны скважинных труб в виде набора взаимосвязанных точечных сосредоточенных масс, учитывающего скважинные усилия, использует фильтр Калмана. Приведенные в качестве примера комбинации могут включать, но не ограничиваются ими, Элементы 9 и 10 в сочетании; один или оба Элемента 9 и 10 в сочетании с Элементом 11 и, необязательно, с Элементом 12; один или оба Элемента 9 и 10 в сочетании с Элементом 13; один или оба Элемента 9 и 10 в сочетании с Элементом 14; а также два или более Элементов 11-14 в сочетании.
в набор команд () позиционирования на поверхности и набор команд () скорости на поверхности; Элемент 13: отличающийся тем, что команда для моделирования колонны скважинных труб с помощью динамической модели в виде набора взаимосвязанных точечных сосредоточенных масс, учитывающего скважинные усилия, содержит команды для моделирования движения j-го участка колонны скважинных труб в соответствии с уравнением (1); а также Элемент 14: отличающийся тем, что команда для динамического моделирования колонны скважинных труб в виде набора взаимосвязанных точечных сосредоточенных масс, учитывающего скважинные усилия, использует фильтр Калмана. Приведенные в качестве примера комбинации могут включать, но не ограничиваются ими, Элементы 9 и 10 в сочетании; один или оба Элемента 9 и 10 в сочетании с Элементом 11 и, необязательно, с Элементом 12; один или оба Элемента 9 и 10 в сочетании с Элементом 13; один или оба Элемента 9 и 10 в сочетании с Элементом 14; а также два или более Элементов 11-14 в сочетании.
[47] Если не указано иное, все числа, отображающие количества ингредиентов, свойства, такие как молекулярный вес, условия реакции и так далее, используемые в данном описании и связанной формуле изобретения, следует понимать как модифицированные во всех случаях термином «около». Соответственно, если не указано иное, числовые параметры, изложенные в нижеследующем описании и прилагаемой формуле изобретения, являются аппроксимациями, которые могут варьироваться в зависимости от требуемых свойств, которые должны быть получены с помощью вариантов реализации по данному изобретению. По меньшей мере и не в качестве попытки ограничить применение доктрины эквивалентов к объему формулы изобретения, каждый числовой параметр должен по меньшей мере толковаться в контексте количества приведенных значимых цифр и с использованием обычных методов округления.
[48] В данном документе представлены один или более приведенных в качестве примера вариантов реализации изобретения, включающих варианты реализации изобретения, раскрытые в данном документе. С целью ясности изложения в данной заявке описаны и проиллюстрированы не все отличительные признаки физической реализации. Понятно, что при разработке физического варианта реализации изобретения, включающего варианты реализации данного изобретения, для достижения целей разработчика, таких как соответствие связанным с системой, связанным с бизнесом, связанным с правительством и другим ограничениям, которые изменяются в соответствии с осуществлением и время от времени, должны быть приняты многочисленные специальные решения в отношении осуществления. Несмотря на то, что работы разработчика могут быть трудоемкими, такие работы, тем не менее, будут обычной задачей для специалистов в данной области техники, которые будут извлекать пользу из данного раскрытия изобретения.
[49] Несмотря на то, что композиции и способы описаны в данном документе в контексте «включения» различных компонентов или этапов, композиции и способы кроме того могут «состоять главным образом из» или «состоять из» различных компонентов и этапов.
[50] Таким образом, данное изобретение хорошо подходит для достижения указанных, а также присущих ему целей и преимуществ. Конкретные варианты реализации изобретения, описанные выше, являются только иллюстративными, так как данное изобретение может быть модифицировано и реализовано различными, но эквивалентными способами, очевидными специалисту в данной области техники благодаря идеям, изложенным в данном документе. Кроме того, не предусматривается никаких ограничений для элементов конструкции или конструкции, показанных в данном документе, кроме как описано ниже в формуле изобретения. Поэтому очевидно, что конкретные иллюстративные варианты реализации изобретения, описанные выше, могут быть изменены, комбинированы или модифицированы, и считается, что все такие вариации находятся в рамках объема и сущности данного изобретения. Изобретение, иллюстративно описанное в данном документе, может соответствующим образом применяться на практике при отсутствии любого элемента, который конкретно не описан в данном документе, и/или любого необязательного элемента, описанного в данном документе. Хотя композиции и способы описаны в терминах «содержащие», «состоящие» или «включающие» различные компоненты или этапы, композиции и способы также могут «состоять, по существу, из» или «состоять из» различных компонентов и этапов. Все числа и диапазоны, раскрытые выше, могут изменяться на некоторую величину. Всякий раз, когда раскрывается числовой диапазон с нижним пределом и верхним пределом, любое число и любой включенный диапазон, попадающий в пределы диапазона, раскрывается конкретно. В частности, каждый диапазон значений (в виде “от около а до около b", или, равносильно, "от приблизительно а до приблизительно b", или, равносильно, "от приблизительно a-b"), раскрытый в данном документе, следует описывать как определяющий каждое число и диапазон, включенные в более широкий диапазон значений. Кроме того, термины в формуле изобретения имеют свое простое, обычное значение, если иное явно и четко не определено патентообладателем. Более того, применяемая в формуле изобретения форма единственного числа предполагает наличие одного или более выражаемых в ней элементов.


























Дифференциальный скважинный инструмент и способ его применения
Узел оборудования для отклонения бура и снаряда для заканчивания скважины
Устройство и способ удаления обломков из скважинного флюида в стволе скважины
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Составной центратор
Система и способ автоматической калибровки нагрузки на датчик бурового долота и регулирования изгиба бурильной колонны
Буровое долото для выполнения электромагнитных измерений в подземном пласте
Прокладка линий через уплотнительные элементы пакерного узла и предотвращение экструзии указанных уплотнительных элементов
Способы инициирования новых разломов в законченном стволе скважины, уже содержащем разломы
Поршневая тянущая система, используемая в подземных скважинах
Устройство регулирования потока для установки в скважине (варианты) и способ регулирования потока
Регулируемый ограничитель потока для использования в подземной скважине
Скважинное устройство для установки в стволе скважины в подземной зоне и способ регулирования потока в стволе скважины
Выходной узел с отклонителем флюида, перенаправляющим флюид по двум или более каналам
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Система переменной сопротивляемости потоку (варианты), предназначенная для применения в подземной скважине, и система скважинной добычи
Устройство для управления потоком текучей среды при помощи подвижного механизма отклонения потока (варианты)
Регулируемый ограничитель потока для использования в подземной скважине
Система переменной сопротивляемости потоку (варианты), содержащая конструкцию регулирования циркуляции потока в подземной скважине
Выпускной узел с устройством направления флюида для формирования и блокировки вихревого потока флюида

