Результат интеллектуальной деятельности: ИСПЫТАНИЯ ПРИ НЕПОЛНОМ ХОДЕ ОТСЕКАЮЩИХ ЗАДВИЖЕК
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Данное изобретение относится, в целом, к клапанам, и более конкретно, к выполнению испытаний при неполном ходе двухпозиционных задвижек.
УРОВЕНЬ ТЕХНИКИ
[0002] Приведенное описание уровня техники служит, в общих чертах, для представления контекста изобретения. Работа названных в данном изобретении авторов, в той степени, в которой она описана в разделе «Уровень техники», а также аспекты описания, которые иным образом не могут быть квалифицированы в качестве предшествующего уровня техники на момент подачи заявки, не признаются ни прямо, ни косвенно в качестве предшествующего уровня техники данного изобретения.
[0003] Приборные системы безопасности (safety instrumented systems, SIS), как правило, содержат задвижки аварийного отключения, которые обычно находятся в полностью открытом или полностью закрытом положении. Например, контроллер аварийного отключения или программируемый логический контроллер (Programmable Logic Controller, PLC) управляет задвижкой аварийного отключения для изменения ее рабочего состояния (например, от полностью открытого до полностью закрытого) в случае аварийной ситуации. Поскольку задачей отсекающей задвижки является либо обеспечение полного потока текучей среды через трубопровод, либо полное отключение потока текучей среды, типичная отсекающая задвижка имеет: уплотнения с высоким коэффициентом трения, свободный рычажный механизм, большой объем (чтобы закрывать трубу, которая может иметь диаметр до нескольких футов), высокую предварительную нагрузку (например, большое смещение, чтобы удерживать задвижку в закрытом положении), и небольшую разность давлений срабатывания (т. е. нижнего и верхнего сигнальных давлений воздуха, используемых для установки начальной предварительной нагрузки смещающего элемента исполнительного механизма).
[0004] В отличие от аварийных отсекающих задвижек, регулирующие клапаны обычно используют для управления дросселированием, например, для установки величины потока текучей среды в определенном диапазоне между полностью открытым и полностью закрытым положением. Конструкции регулирующих клапанов, как правило, предназначены для сведения к минимуму сигнала ошибки между заданной позицией и обратной связью по ходу, что может включать минимизацию трения, характеризующего механизм клапана, создание туго затянутых рычажных механизмов, наличие пружин с большой жесткостью и небольшими предварительными нагрузками, установку давлений вблизи концов рабочего диапазона пружины и т. п.
[0005] Чтобы гарантировать, что задвижки аварийного отключения в системе будут функционировать должным образом, когда это необходимо, операторы системы управления технологическим процессом и/или программное обеспечение для управления технологическим процессом могут периодически запускать испытания при неполном ходе, во время которых эти задвижки частично открываются или частично закрываются. Эти испытания обычно выполняют, когда задвижка аварийного отключения постоянно включена в рабочий процесс. С другой стороны, поскольку регулирующие клапаны не используются для действия отключения, регулирующие клапаны редко подвергают испытаниям при неполном ходе.
[0006] Из-за этой разницы в конструктивных факторах простое применение технологии позиционирования, разработанной для дросселирующих (регулирующих) клапанов, обладает определенными недостатками для двухпозиционных (отсекающих) задвижек во время испытаний при неполном ходе. Например, удаление воздуха из исполнительного механизма отсекающей задвижки, начиная от жесткого останова, занимает значительное время и приводит к значительным отклонениям в ходе. Кроме того, более крупные исполнительные механизмы дают более высокие сигналы ошибки, что фактически требует, чтобы испытания при неполном ходе выполнялось медленнее (в то время как важно быстро и надежно выполнить испытания при неполном ходе задвижки, которая постоянно включена). Кроме того, переходы к жестким остановам в конце испытания могут давать показания давления, которые указывают на состояние стопорения задвижки, тогда как отсекающая задвижка работает должным образом.
[0007] Во всяком случае, по этим причинам методы испытаний при неполном ходе задвижек, известные в настоящее время, либо не дают точных результатов при применении к отсекающим задвижкам (или, в более общем случае, к двухпозиционным задвижкам), либо дают результаты, которые имеют небольшую ценность для контроля и обслуживания отсекающих задвижек, или слишком продолжительны для получения полезных результатов.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0008] Контроллер задвижки или другое подходящее инструментальное средство выполняет испытания при неполном ходе отсекающей задвижки, путем создания сигнала заданной позиции, особенно подходящего для задвижек, которые обычно полностью открыты или полностью закрыты. Данный сигнал заданной позиции не требует ни того, чтобы ход задвижки доходил до заданной позиции, ни того, чтобы указанный сигнал заданной позиции доходил до резкого отключения при достижении заданного порогового значения. Кроме того, контроллер задвижки применяет критерии приемлемости, которые гарантируют, что отсекающая задвижка будет перемещаться на минимальную величину от жесткого останова в некоторый момент во время испытаний, и прервет испытания при неполном ходе, если отсекающая задвижка достигнет максимального порогового значения смещения хода. Кроме того, контроллер задвижки применяет определенный набор критериев приемлемости к данным, показывающим взаимосвязь между давлением исполнительного механизма и ходом задвижки, чтобы точно определить состояние стопорения задвижки. Иначе говоря, по меньшей мере в некоторых из описанных ниже вариантов реализации динамика системы определяется посредством строгого рассмотрения входного давления и результирующего хода.
[0009] Одним из вариантов реализации этих способов является способ выполнения испытаний при неполном ходе задвижек. Способ включает в себя создание сигнала заданной позиции для хода задвижки во время испытаний при неполном ходе, подачу сигнала заданной позиции к задвижке и определение того, выдерживает ли задвижка испытания при неполном ходе, используя ответ на сигнал заданной позиции. Создание сигнала заданной позиции включает определение первого намеченного значения для сигнала заданной позиции на основании по меньшей мере порогового значения смещения хода, при этом пороговое значение смещения хода соответствует требуемой протяженности хода задвижки во время испытаний при неполном ходе, причем первое намеченное значение соответствует большей протяженности хода задвижки, чем пороговое значение смещения хода. Создание сигнала заданной позиции дополнительно включает в себя быстрое линейное изменение сигнала заданной позиции от начального значения до первого намеченного значения в течение первого временного интервала; после первого временного интервала поддержание сигнала заданной позиции на уровне первого намеченного значения в течение второго временного интервала; определение второго намеченного значения для сигнала заданной позиции на основании по меньшей мере начального значения; и в течение третьего временного интервала, следующего за вторым интервалом, быстрое линейное изменение сигнала заданной позиции от первого намеченного значения до второго намеченного значения в направлении, противоположном быстрому линейному изменению сигнала заданной позиции в течение первого временного интервала.
[0010] Другим вариантом реализации этих способов является способ определения состояния стопорения задвижки во время испытаний при неполном ходе отсекающей задвижки. Способ включает в себя получение сигнала, показывающего давление исполнительного механизма, когда задвижка перемещается между конечной точкой и положением смещения от конечной точки, и определение того, находится ли давление исполнительного механизма в пределах набора критериев приемлемости во время испытаний при неполном ходе. Критерии включают (i) минимальное давление исполнительного механизма, когда задвижка перемещается между конечной точкой и положением смещения, (ii) максимальное давление исполнительного механизма, когда задвижка перемещается между положением смещения и конечной точкой, и (iii) давление прерывания, когда задвижка перемещается между пороговым положением останова и положением останова задвижки, при этом давление прерывания соответствует усилию, требуемому для прерывания жесткого останова.
[0011] Еще одним вариантом реализации этих способов является система, содержащая отсекающую задвижку, выполненную с возможностью работы в полностью открытом положении или в полностью закрытом положении, датчик положения для создания сигнала положения, показывающего текущее положение отсекающей задвижки, и цифровой контроллер задвижки, соединенный с отсекающей задвижкой, и выполненный с возможностью осуществления испытаний при неполном ходе отсекающей задвижки. Для выполнения испытаний при неполном ходе цифровой контроллер задвижки выполнен с возможностью определения первого намеченного значения для сигнала заданной позиции, на основании по меньшей мере порогового значения смещения хода, при этом пороговое значение смещения хода соответствует требуемой протяженности хода задвижки во время испытаний при неполном ходе, причем первое намеченное значение соответствует большей протяженности хода задвижки, чем пороговое значение смещения хода; быстрого линейного изменения сигнала заданной позиции от начального значения до первого намеченного значения в течение первого временного интервала; после первого временного интервала, поддержания сигнала заданной позиции на уровне первого намеченного значения в течение второго временного интервала; определения второго намеченного значения для сигнала заданной позиции на основании по меньшей мере начального значения; быстрого линейного изменения сигнала заданной позиции в течение третьего временного интервала, следующего за вторым интервалом, от первого намеченного значения до второго намеченного значения в направлении, противоположном быстрому линейному изменению сигнала заданной позиции в течение первого временного интервала; и отслеживания позиционирования отсекающей задвижки в ответ на сигнал заданной позиции с использованием сигнала положения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
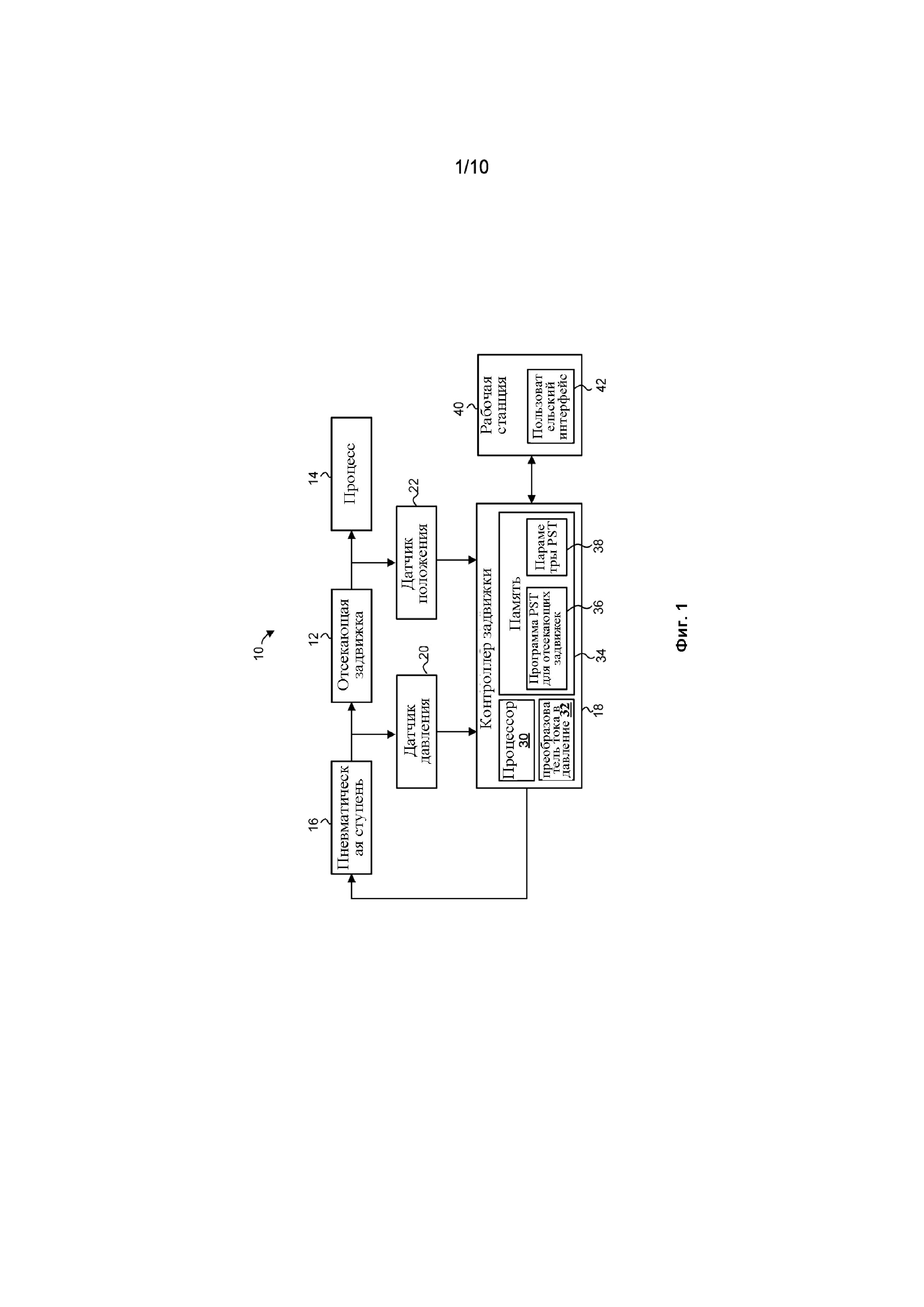
[0012] Фиг. 1 представляет собой структурную схему примера системы, в которой контроллер выполняет испытания при неполном ходе отсечной задвижки;
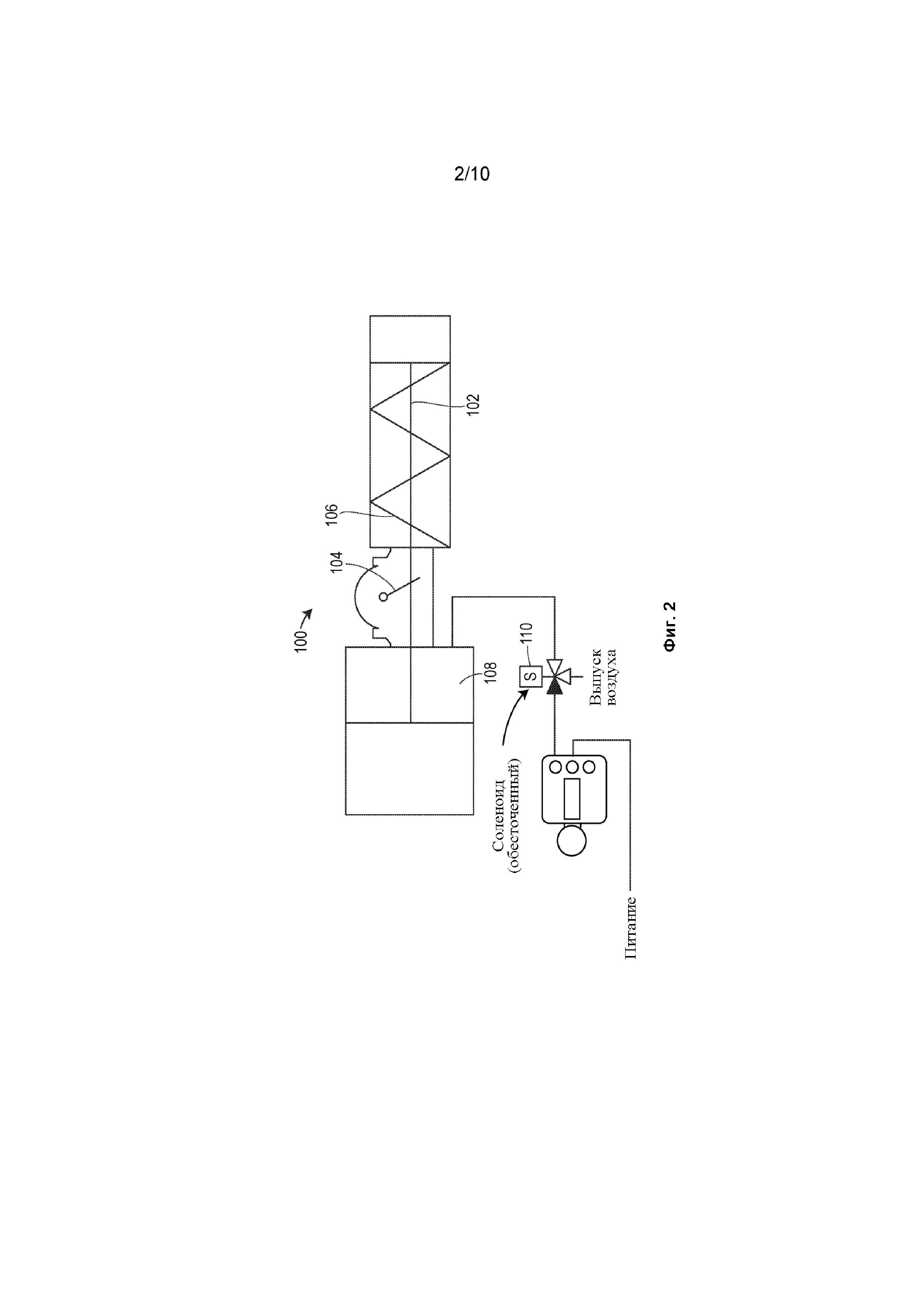
[0013] Фиг. 2 представляет собой структурную схему, иллюстрирующую пример пневматического устройства для исполнительного механизма отсекающей задвижки, которое может работать в системе по фиг. 1;
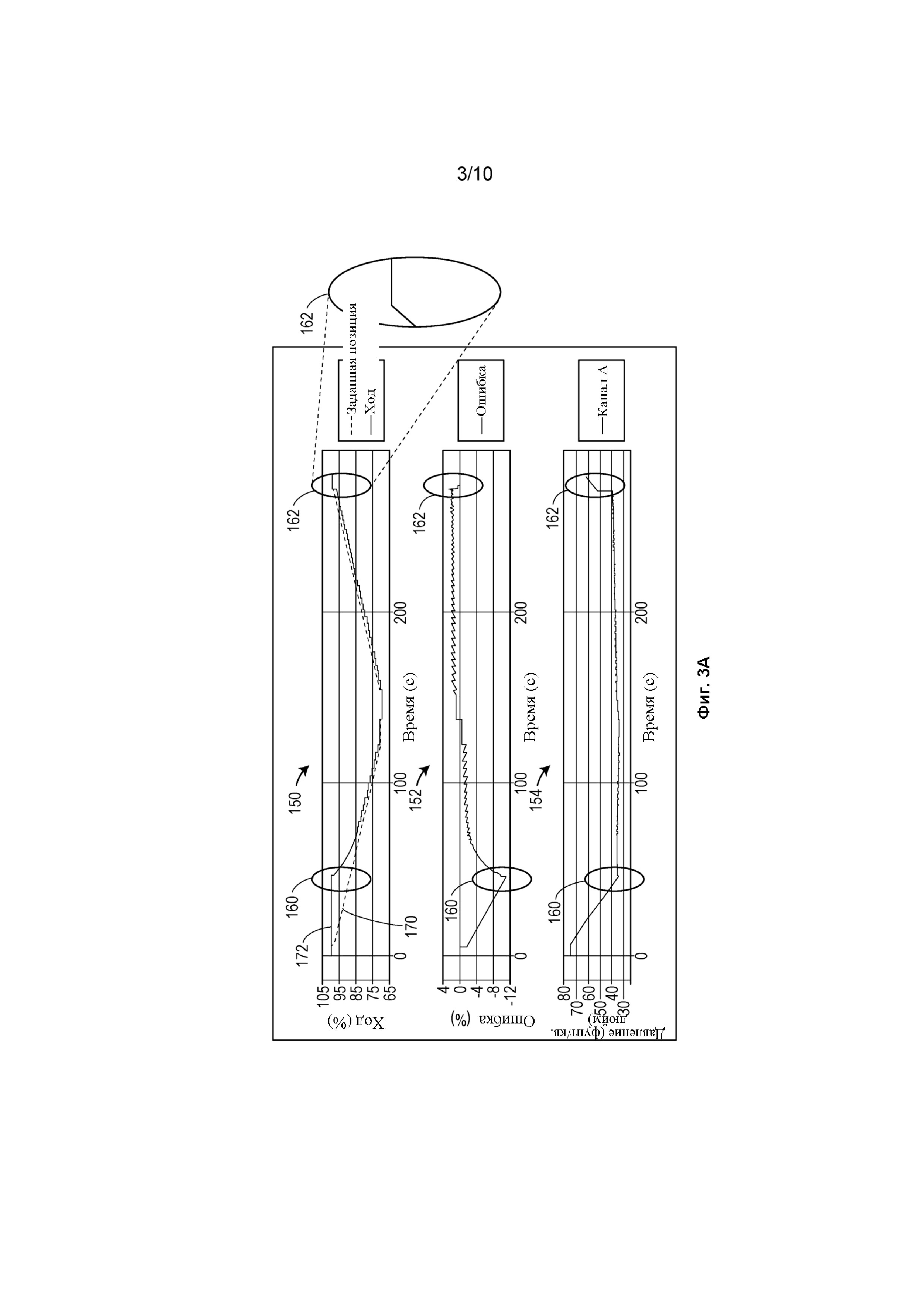
[0014] Фиг. 3A представляет собой набор графиков, которые иллюстрируют изменения значений параметров в течение испытаний при неполном ходе примера отсекающей задвижки, выполняемых в обычном режиме;
[0015] Фиг. 3B представляет собой график давления исполнительного механизма в зависимости от хода исполнительного механизма для примера отсекающей задвижки, выполненного с возможностью работы при множестве не полностью открытых положений;
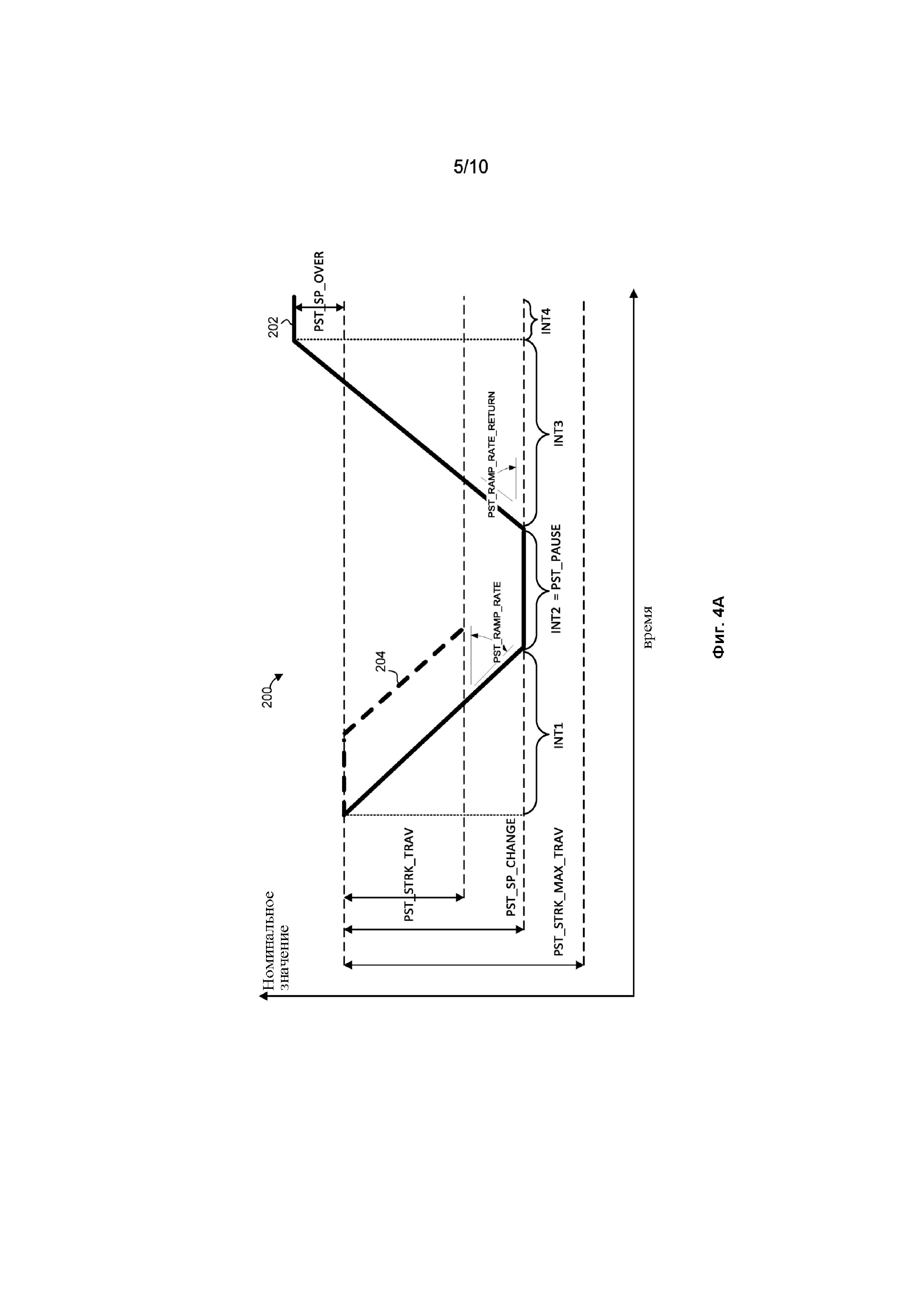
[0016] Фиг. 4A представляет собой график номинального сигнала заданной позиции, с возможностью создания которого выполнен контроллер по фиг. 1, для осуществления испытаний при неполном ходе отсекающей задвижки;
[0017] Фиг. 4B представляет собой график сигнала заданной позиции с модификацией опережающего реверсирования, с возможностью обеспечения которого выполнен контроллер по фиг. 1, для осуществления испытаний при неполном ходе отсекающей задвижки;
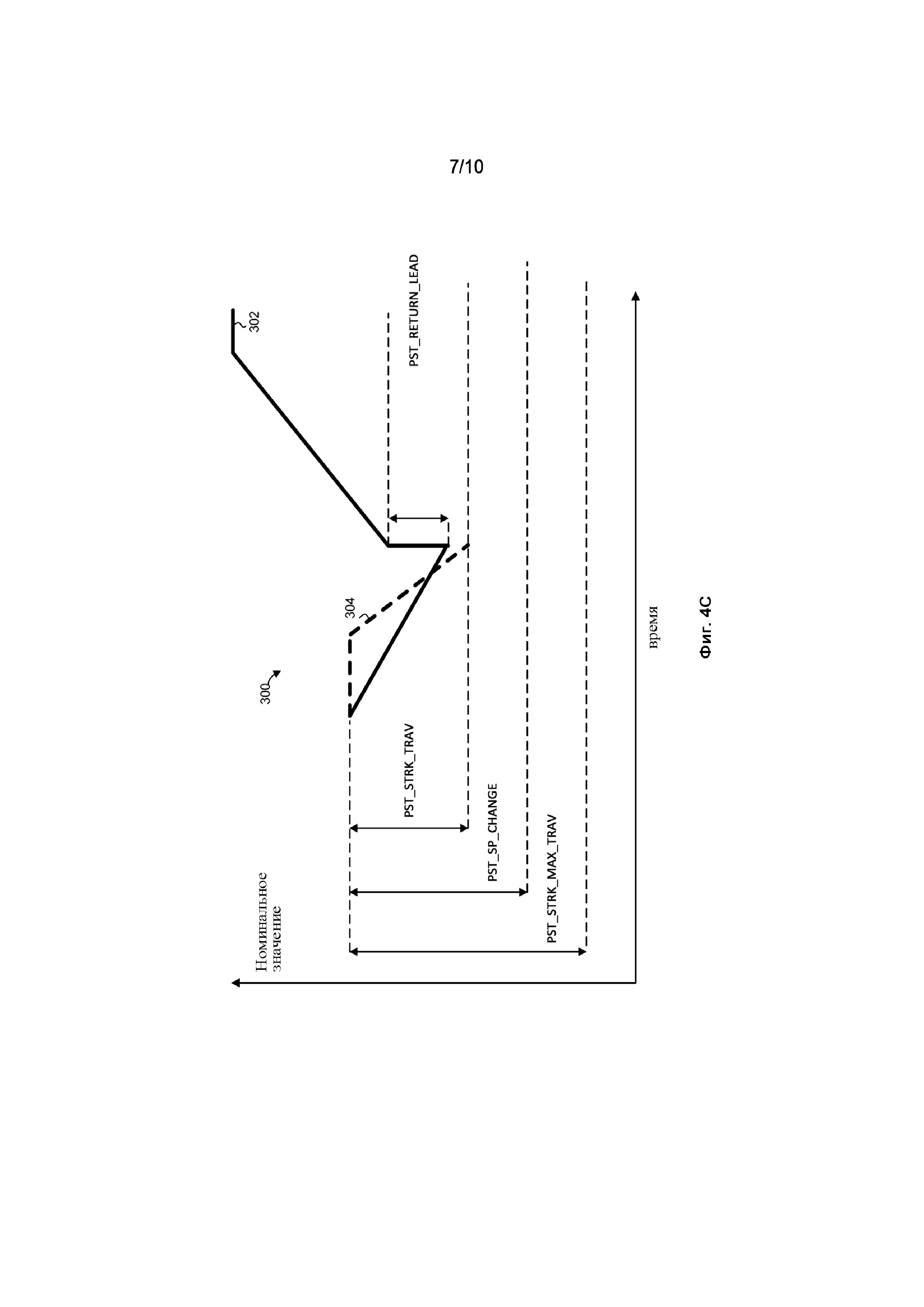
[0018] Фиг. 4C представляет собой график сигнала заданной позиции с модификацией опережающего реверсирования, при которой положение задвижки приводит к созданию сигнала заданной позиции, с возможностью создания которого выполнен контроллер по фиг. 1, для осуществления испытаний при неполном ходе отсекающей задвижки;
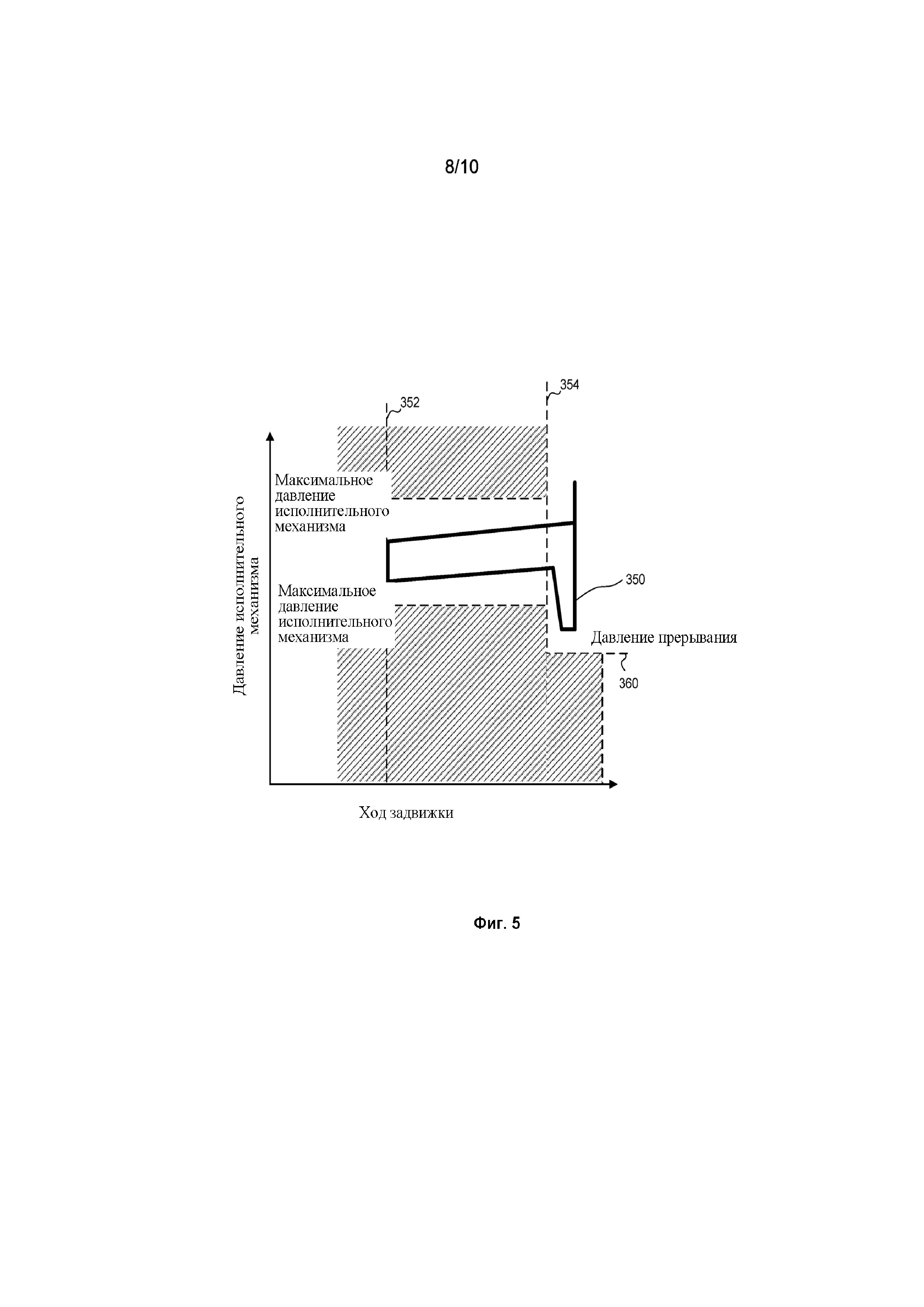
[0019] Фиг. 5 представляет собой график, иллюстрирующий критерии приемлемости, применяемые к графику давления в зависимости от хода во время испытаний при неполном ходе, которые контроллер по фиг. 1 может использовать для определения состояния стопорения задвижки для отсекающей задвижки;
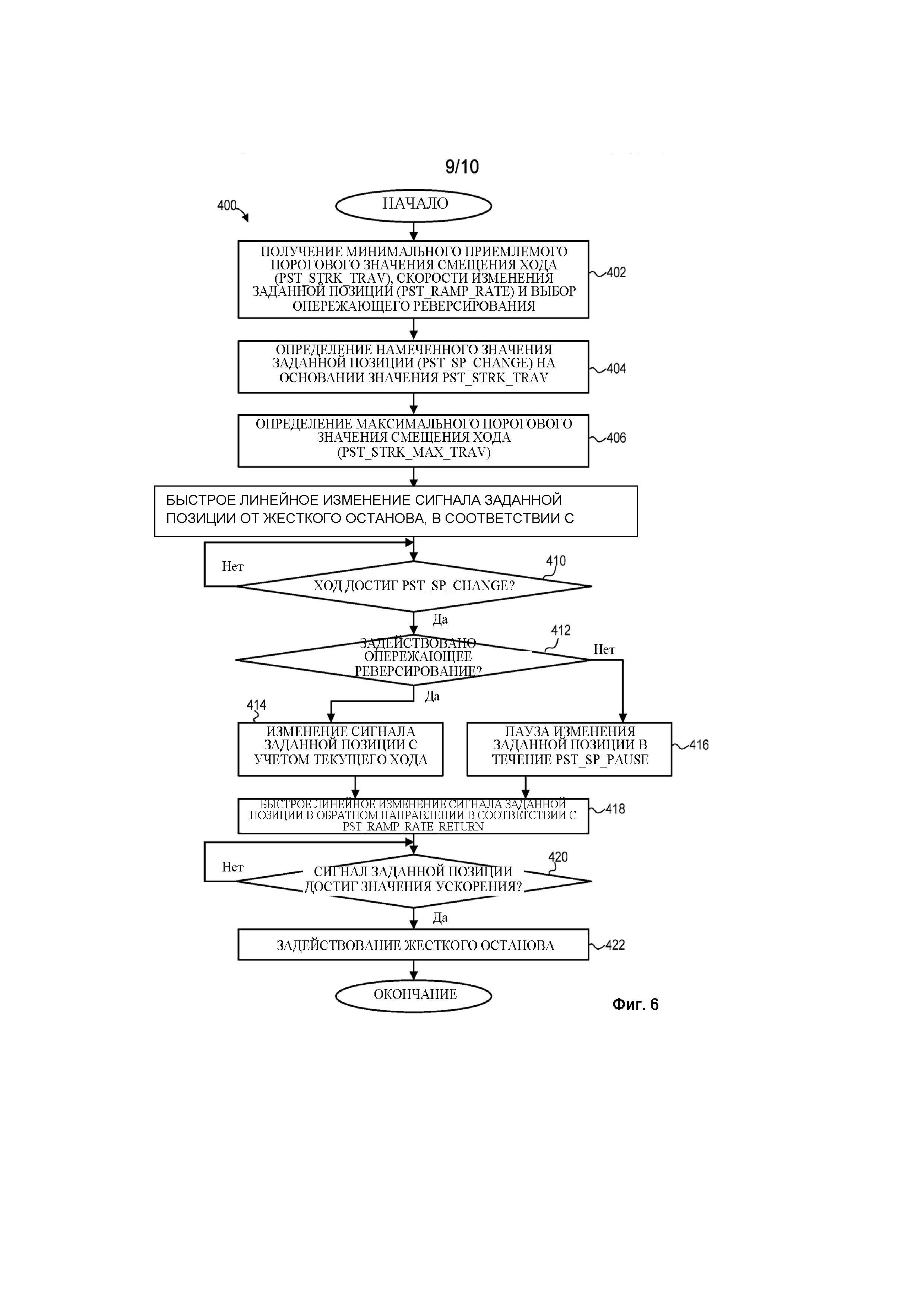
[0020] Фиг. 6 представляет собой схему последовательности операций для примера способа создания сигнала заданной позиции для испытаний при неполном ходе отсекающей задвижки, которая может быть осуществлена в системе по фиг. 1; и
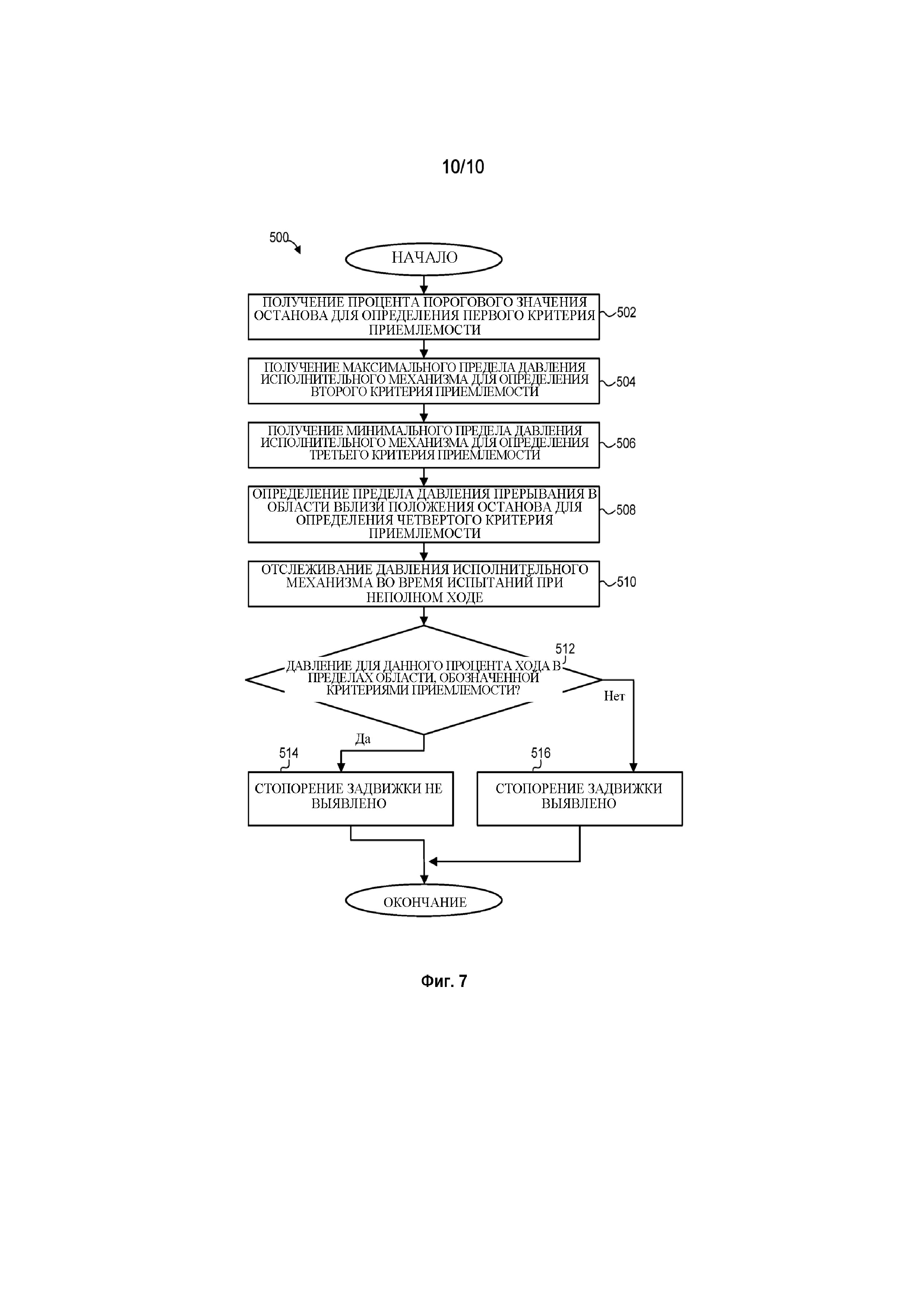
[0021] Фиг. 7 представляет собой схему последовательности операций для примера способа определения состояния стопорения задвижки, которая может быть осуществлена в системе по фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0022] Вообще говоря, способы согласно настоящему изобретению позволяют инструментальному средству проводить эффективные и точные испытания при неполном ходе (partial-stroke test, PST) двухпозиционного клапана, такого как аварийная отсекающая задвижка. Для ясности пример системы, содержащей отсекающую задвижку и контроллер задвижки, который испытывает значения отключения в соответствии с этими способами, кратко описан со ссылкой на фиг.1 с последующим описанием примера пневматической установки для отсекающей задвижки, как показано на фиг.2. Примеры сигналов заданной позиции и показаний параметров описаны со ссылкой на фиг. 3A-5, а примеры способов выполнения испытаний при неполном ходе и определения состояния стопорения задвижки описаны со ссылкой на фиг. 6 и 7.
Пример системы и установки пневматического исполнительного механизма
[0023] Как показано на фиг. 1, пример системы 10 содержит отсекающую задвижку 12, выполненную с возможностью прекращения потока текучей среды в процессе 14 в случае аварийной ситуации. Пневматическая ступень 16 может содержать пневматическое устройство позиционирования и исполнительный механизм или пневматическое реле и/или исполнительный механизм. Пневматическая ступень 16 создает сигнал для установки в требуемое положение перемещаемого элемента задвижки (например запорного элемента задвижки) отсекающей задвижки 12, чтобы тем самым ограничивать или увеличивать поток технологической текучей среды. Пример исполнительного механизма, который может быть использован в пневматической ступени 16, дополнительно описан ниже со ссылкой на фиг. 2.
[0024] Цифровой контроллер 18 задвижки (или просто «контроллер 18 задвижки») может управлять отсекающей задвижкой 12 через пневматическую ступень 16. Контроллер 18 задвижки может получать сигналы, показывающие давление исполнительного механизма и ход задвижки, от датчика 20 давления и датчика 22 положения, соответственно. Датчики 20 и 22 могут быть выполнены с использованием каких-либо подходящих компонентов, включая известные на современном уровне техники.
[0025] Как показано на фиг. 1, контроллер 18 задвижки содержит процессор 30, преобразователь 32 тока в давление (current-to-pressure, I/P), и память 34, сохраняющую программу 36 PST. Память 34 может содержать энергонезависимый носитель, доступный для чтения процессором 30, а программа 36 PST может содержать команды, выполняемые процессором 30, на каком-либо подходящем языке программирования. Память 34 также может сохранять параметры 38 PST, такие как скорость (скорости) быстрого линейного изменения для сигнала заданной позиции, выбор опережающего реверсирования и т. п., как описано ниже.
[0026] Рабочая станция 40 в этой примерной конфигурации соединена с контроллером 34 задвижки, чтобы позволить оператору настраивать PST для отсекающей задвижки 12, включать PST, отслеживать ход испытаний и т. п. Рабочая станция 40 содержит один или более процессоров, память, доступную для чтения одним или более процессоров, сетевой интерфейс (не показано, чтобы избежать перегруженности), и пользовательский интерфейс 42, такой как сенсорный экран, обычный экран с клавиатурой и т. п.
[0027] Фиг. 2 иллюстрирует пример пневматической установки для исполнительного механизма 100, которая может быть использована с отсекающей задвижкой 12 по фиг.1. Однако в более широком смысле способы согласно настоящему изобретению совместимы с любым типом исполнительного механизма, к которому может быть подано заданное значение, указывающее конкретный процент хода задвижки, и в котором может быть измерен по меньшей мере сигнал, указывающий текущее положение дросселирующего элемента.
[0028] В исполнительном механизме 100 шток 102 соединен с запорным элементом задвижки или другим подходящим дросселирующим элементом посредством вилки 104. Датчик 22 углового положения может быть установлен на вале исполнительного механизма 100 для создания электрического сигнала, показывающего ход задвижки. В других вариантах реализации датчик положения может быть соединен с исполнительными механизмами с использованием других подходящих способов.
[0029] Пружина 106 смещает исполнительный механизм 100 в полностью закрытое положение. В других вариантах реализации пружина 106 может быть заменена другим смещающим элементом. Давление в цилиндре 108 препятствует перемещению пружиной 106 исполнительного механизма 100 в полностью закрытое положение. Таким образом, цилиндр 108 находится под давлением в процессе обычной работы, когда отсекающая задвижка, на которой работает исполнительный механизм 100, не работает. Давление исполнительного механизма может быть измерено в камере 108. С этой целью может быть использован любой подходящий датчик давления.
[0030] В аварийной ситуации или в ответ на другое событие, которое требует, чтобы задвижка прекращала поток, соленоид 110 обесточивается, что приводит к сбросу давления в камере 108, что, в свою очередь, позволяет пружине 102 перемещать задвижку в закрытое состояние. Когда к соленоиду 110 подано питание, давление подается в камеру 108, чтобы таким образом перемещать задвижку. Во время PST соленоид 110 обычно питается энергией и неподвижен.
Примеры сигналов заданной позиции
[0031] Перед описанием примеров сигналов заданной позиции, создаваемых в соответствии со способами согласно настоящему изобретению, в связи с фиг. 3А вкратце рассматривается сигнал заданной позиции вместе с изменениями хода и давления в течение обычного PST отсекающей задвижки. Графики на фиг. 3А иллюстрируют ход задвижки (график 150), процент ошибки между заданной позицией и ходом задвижки (график 152) и давление исполнительного механизма (график 154) в зависимости от времени. Эти графики иллюстрируют типичную реакцию отсекающей задвижки, когда давление в цилиндре сбрасывается. Вообще говоря, инструментальное средство в этом сценарии быстро линейно изменяет командный сигнал (заданной позиции) до заданной точки, останавливается, так что ход задвижки может доходить до командного сигнала, а затем быстро линейно изменяет командный сигнал обратно, до исходного положения. Когда сигнал заданной позиции в определенной точке выравнивается, инструментальное средство разрешает доведение хода задвижки. Инструментальное средство принудительно приводит в действие пневматику для полной подачи или полного удаления воздуха, и, если ход отстает от заданной позиции, ход будет переходить в режим жесткого останова. Это внезапное изменение в пневматике вызывает искажения данных при останове, что затрудняет интерпретацию результатов.
[0032] В (приблизительной) области 160 задвижка начинает двигаться после первоначального снижения давления. Как лучше всего проиллюстрировано на графике 150, сигнал 170 заданной позиции постепенно изменяется, тогда как сигнал 172 хода задвижки не начинает изменяться до точки в области 160. В результате ошибка увеличивается почти до 12%, как видно на графике 152. Кроме того, как видно из графика 154, давление исполнительного механизма продолжает уменьшаться, пока не достигает области 160, где уровень давления снижается.
[0033] Если ошибка используется в качестве показателя правильного функционирования задвижки, данные, показанные на графике 152, и особенно данные в области 160, могут быть интерпретированы как возможная проблема. Тем не менее, показания хода и давления на фиг. 3А могут соответствовать нормальной работе узла отсекающей задвижки (т. е. отсекающей задвижки и исполнительного механизма) с большим объемом, небольшой разностью давлений срабатывания и высокой предварительной нагрузкой. Иначе говоря, несмотря на то, что ошибка 12% может быть в целом надежным показателем неправильной работы обычного регулирующего клапана, эта ошибка не обязательно указывает на отказ для отсекающей задвижки, особенно крупной отсекающей задвижки. Удаление воздуха из исполнительного механизма отсекающей задвижки, начиная от жесткого останова, занимает значительное время и приводит к значительным отклонениям в ходе, как указано выше. Таким образом, при проведении PST, как показано на фиг. 3A, могут создаваться данные, которые вводят в заблуждение относительно исправности отсекающей задвижки.
[0034] Контроллер мог бы минимизировать сигнал ошибки для больших исполнительных механизмов, замедляя испытательный сигнал, чтобы пневматика успевала реагировать. Однако это обходное решение ведет только к продлению испытаний. Эти ограничения обусловлены тем, что сигнал ошибки является недостоверной переменной для испытаний при неполном ходе, в которых обычно требуется определить, является ли трение чрезмерным и произошел ли сбой при перемещении задвижки. Сигнал ошибки между опорным значением и ходом напрямую не содержит необходимую входную переменную для идентификации динамики системы. Кроме того, замедление PST несовместимо с другой общей задачей, заключающейся в том, чтобы быстро и с минимальным нарушением процесса быстро завершить PST на работающей отсекающей задвижке.
[0035] Кроме того, область 162 на фиг. 3А иллюстрирует, что в конце PST переход к резкому отключению может привести к аномалиям в данных давления из-за линейных ограничений вблизи датчика давления, локально повышающих чувствительность к давлению. Как показано на графике 154, давление сначала поднимается приблизительно от 40 фунт/кв. дюйм до 52 фунт/кв. дюйм (0,2758-0,3585 МПа) без соответствующего изменения хода, а затем постепенно увеличивается с изменением хода. Кроме того, график 180 на фиг. 3В иллюстрирует изменения в измеренном давлении исполнительного механизма в зависимости от хода задвижки для двух конфигураций той же или аналогичной отсекающей задвижки. В частности, одна из конфигураций задвижки содержит рециркулятор (точки данных 184), а другая конфигурация не содержит рециркулятор (точки данных 182). Для обеих конфигураций задвижка перемещается между 100% и примерно 68%. На фиг. 3В область 182, по-видимому, показывает, что отсутствует ход в ответ на значительное изменение давления приблизительно между 40 и 53 фунт/кв. дюйм по манометру (0,2758-0,3654 МПа).
[0036] Разрывы в областях 162 и 186 могут быть обусловлены отставанием хода от заданной позиции, когда действует резкое отключение, что приводит к резкому увеличению потока и одновременному повышению локального давления на датчик, а не на цилиндр. Эти данные не отображают того, что происходит в цилиндре, и затрудняют оценку стопорения задвижки на обратном ходе. В частности, данные не дают четкого представления о том, застопорилась ли задвижка, а затем ускорилась, или же кажущиеся разрывы являются признаком того, как были выполнены PST.
[0037] Теперь, как показано на фиг. 4А, график 200 иллюстрирует номинальный сигнал 202 заданной позиции, который инструментальное средство, такое как контроллер 18 задвижки, может подавать к отсекающей задвижке для эффективных и точных испытаний отсекающей задвижки 12, не создавая неоднозначностей в данных, описываемых со ссылкой на фиг. 3А и 3В. В более общем случае сигнал 202 заданной позиции может быть создан посредством любого подходящего инструментального средства и подан к любому подходящему двухпозиционному клапану.
[0038] Чтобы начать PST по фиг. 4A, оператор может указать необходимую величину хода для отсекающей задвижки 12 во время PST, а также необходимую скорость (скорости) изменения для сигнала заданной позиции через пользовательский интерфейс 42 рабочей станции 40 (см. фиг. 1). Например, пользователю может потребоваться, чтобы отсекающая задвижка перемещалась от положения открытия на 30% от 100% открытия до положения открытия на 70% со скоростью 1% в секунду при ходе (как параметр PST_RAMP_RATE), и 2% в секунду при возврате (как параметр PST_RAMP_RATE_RETURN). В некоторых вариантах реализации пользователь может указать одну и ту же скорость для обоих направлений; однако может оказаться желательным выполнять ход относительно медленно, а возврат – относительно быстро. Рабочая станция 40, в свою очередь, может подавать к контроллеру 18 задвижки эти параметры, которые будут использоваться в качестве параметров 38 PST.
[0039] Требуемая величина хода иллюстрируется как минимальный требуемый ход или минимальное пороговое значение смещения хода PST_STRK_TRAV, как показано на фиг. 4А. Используя значение PST_STRK_TRAV, контроллер 18 задвижки может вычислить параметр PST_SP_CHANGE, который соответствует смещению заданной позиции от жесткого останова. Параметр PST_SP_CHANGE может быть выражен в процентах. В примере варианта реализации контроллер 18 задвижки вычисляет PST_SP_CHANGE путем умножения PST_STRK_TRAV на определенный заданный или предварительно настроенный множитель, например 1,1, для определения увеличения на 10% по сравнению с PST_STRK_TRAV. В более общем случае контроллер 18 задвижки может определять PST_SP_CHANGE, применяя любую подходящую формулу к PST_STRK_TRAV, но в любом случае параметр PST_SP_CHANGE должен определять большее значение, чем PST_STRK_TRAV, для компенсации смещений калибровки, трения или других смещений. Следует заметить, что параметр PST_SP_CHANGE не определяет максимальное смещение хода. Напротив, это значение определяет одно из намеченных значений для сигнала заданной позиции.
[0040] В течение первого интервала INT1 контроллер 18 задвижки быстро линейно изменяет сигнал 202 со скоростью PST_RAMP_RATE от исходного положения задвижки, например жесткого останова, до первого намеченного значения PST_SP_CHANGE. В типичной ситуации сигнал 204 хода отстает от сигнала 202 заданной позиции, как показано на фиг. 4А.
[0041] После завершения линейного нарастания в течение интервала INT1 номинальный сигнал 202 заданной позиции остается постоянным в течение следующего интервала INT2. Длительность интервала INT2 может регулироваться параметром PST_PAUSE. В зависимости от варианта реализации параметр PST_PAUSE может быть зафиксирован при определенном значении, например, в два раза большем времени запаздывания от останова задвижки (то есть это занимает вдвое больше времени, чем тогда, когда задвижка сначала реагирует на сигнал заданной позиции и начинает двигаться). В одном примере варианта реализации параметр PST_PAUSE вдвое больше времени запаздывания при минимальном значении 20 секунд. Кроме того, в некоторых вариантах реализации оператор может переопределять значение по умолчанию или предполагаемое значение для PST_PAUSE.
[0042] Кроме того, как показано на фиг. 4А контроллер 18 задвижки может применять максимальное пороговое значение смещения хода PST_STRK_MAX_TRAV в качестве вторичного критерия безопасности. Например, значение PST_STRK_MAX_TRAV можно рассчитать, используя PST_STRK_TRAV. В качестве более конкретного примера параметр PST_STRK_MAX_TRAV может быть установлен равным 1,3 * PST_STRK_TRAV. Однако в общем случае значение PST_STRK_MAX_TRAV не обязательно должно быть больше, чем PST_STRK_TRAV. Если сигнал 204 хода задвижки достигает параметра PST_STRK_MAX_TRAV, контроллер 18 задвижки может прервать PST. Это может произойти, когда имеются ошибки калибровки (например, когда смещение I/P выключено) или вследствие других аномальных условий. Контроллер 18 задвижки может сравнивать сигнал 204 хода с параметром PST_STRK_MAX_TRAV в течение всех интервалов PST, от INT1 до INT4.
[] После времени удержания между исходным и обратным быстрым линейным изменением в течение интервала INT2 сигнал 202 заданной позиции начинает быстро линейно изменяться в обратном направлении со скоростью PST_RAMP_RATE RETURN в течение интервала INT3. Сигнал 202 заданной позиции в этом примере варианта реализации линейно изменяется до намеченного значения, которое превышает положение жесткого останова на величину PST_SP_OVER. Например, значение PST_SP_OVER может быть предварительно настроено как определенный процент.
[0043] Контроллер 18 задвижки, таким образом, ускоряет сервомеханизм и ожидает, чтобы сигнал 204 хода доводился в течение интервала INT4 перед вводом в действие резкого отключения. Значение интервала INT4 может быть установлено равным PST_PAUSE или другому значению, возможно, включая заданное пользователем значение, при необходимости.
[0044] В примере сценария контроллер 18 задвижки быстро линейно изменяет сигнал 202 заданной позиции от 100% до 80%, удерживает сигнал заданной позиции 202 в течение 20 секунд, возвращается к 110%, удерживает сигнал 202 заданной позиции дополнительно в течение 20 секунд и вводит в действие резкое отключение.
[0045] Вместо того, чтобы использовать сигнал ошибки в качестве критерия приемлемости согласно способу, описанному со ссылкой на фиг. 3А, контроллер 18 задвижки использует в качестве критериев приемлемости параметры PST_STRK_TRAV и PST_STRK_MAX_TRAV. При возврате контроллер 18 задвижки сравнивает сигнал 204 хода со значением исходного положения (в данном случае жесткий останов), чтобы определить, вернулась ли задвижка в исходное положение. Таким образом, контроллер 18 задвижки может более эффективно выполнять PST и более точно проверять соответствие отсекающей задвижки.
[0046] Далее, как показано на фиг. 4В, график 250 иллюстрирует подачу сигнала 252 заданной позиции к отсекающей задвижке, и соответствующий сигнал 254 хода. Сигнал 252 заданной позиции в целом аналогичен сигналу 252 заданной позиции, за исключением того, что здесь оператор выбрал опережающее реверсирование в качестве одного из параметров PST. Более конкретно, в примере варианта реализации оператор указывает, желательно ли, чтобы сигнал заданной позиции имел номинальный профиль, показанный на фиг. 4А, где длительность интервала INT2 фиксирована на уровне PST_PAUSE, или длительность интервала INT2 должна быть ограничена временем, когда сигнал хода достигнет параметра PST_STRK_TRAV.
[0047] График 250 иллюстрирует сценарий, в котором оператор разрешил функцию опережающего реверсирования, и контроллер 18 задвижки изменяет сигнал 252 заданной позиции в точке 260 реверсирования в ответ на получение показания от датчика хода о том, что сигнал 254 хода достиг PST_STRK_TRAV. Соответственно, сигнал 252 заданной позиции начинает быстро линейно изменяться в точке 260, а не оставаться на уровне PST_SP_CHANGE. Аналогично сигналу 202 заданной позиции, сигнал 252 заданной позиции может быстро линейно изменяться за пределы жесткого останова, чтобы ускорять сервомеханизм, так что сигнал 254 хода может доводиться без замедления ближе к концу испытаний.
[0048] Вообще говоря, возможность опережающего реверсирования позволяет контроллеру 18 задвижки минимизировать общее время испытаний и минимизировать изменения процесса. Например, для определенной крупной отсекающей задвижки общее время испытаний было уменьшено примерно с 240 секунд до 150 секунд. Функция опережающего реверсирования может быть особенно полезна при использовании с крупными исполнительными механизмами, которые, как правило, бывают медленными.
[0049] Когда задействовано опережающее реверсирование, контроллер 18 задвижки может переопределять начальные условия для заданной позиции возврата как фактический ход или текущую заданную позицию, в зависимости от того, что ближе к жесткому останову. Кроме того, поскольку сигнал 254 перемещения часто отстает от сигнала 252 заданной позиции, контроллер 18 задвижки может добавить «ведущее» значение PST_RETURN_LEAD к сигналу 252 заданной позиции в точке 260 опережающего реверсирования. Это ведущее значение приводит к немедленному или почти немедленному реверсированию хода задвижки.
[0050] Например, если номинальный сигнал заданной позиции, который действует от 100% до 70% при минимальном пороговом значении параметра PST_STRK_TRAV, установленном на уровне 80%, контроллер 18 задвижки может устанавливать заданную позицию возврата большей, чем текущее значение сигнала заданной позиции или текущее значение сигнала хода. Если сигнал заданной позиции меньше сигнала хода, когда достигается PST_STRK_TRAV (как обычно), контроллер 18 задвижки устанавливает заданную позицию возврата на 80% в соответствии с номинальным профилем сигнала заданной позиции. Однако, поскольку сигнал хода отстает от сигнала заданной позиции, установка заданной позиции возврата на уровне текущего сигнала хода приведет к тому, что отсекающая задвижка будет смещаться за это пороговое значение. Чтобы решить эту проблему, контроллер 18 задвижки может задать начальные условия для заданной позиции возврата равными 80% плюс PST_RETURN_LEAD, например 5%, так что общее начальное условие для заданной позиции возврата будет составлять 85%.
[0051] На фиг. 4В показан (более распространенный) сценарий, в котором сигнал 254 хода отстает от заданной позиции 252 хода в точке 260 реверсирования. Опережающее реверсирование разрешается, и контроллер 18 задвижки немедленно доводит заданную позицию до PST_RETURN_LEAD и добавляет PST_STRK_TRAV, чтобы начать быстрое линейное изменение сигнала 254 хода в обратном направлении от этой точки. Иначе говоря, контроллер 18 задвижки мгновенно изменяет заданную позицию на (PST_SP_CHANGE - PST_STRK_TRAV) + PST_RETURN_LEAD. С другой стороны, на графике, показанном на фиг. 4С, сигнал 302 заданной позиции отстает от сигнала 304 хода. Соответственно, контроллер 18 задвижки в этом случае добавляет PST_RETURN_LEAD к текущему значению сигнала 302 заданной позиции, тем самым мгновенно изменяя заданную позицию посредством только PST_RETURN_LEAD.
Пример анализа давления
[0052] Далее, фиг. 5 иллюстрирует пример графика 350 давления в зависимости от хода, созданного во время PST отсекающей задвижки в соответствии со способами, описанными выше со ссылкой на фиг. 4A-C. Аналогично графику зависимости давления от хода на фиг. 3B, точки, составляющие график 350, соответствуют показаниям давления исполнительного механизма при различных процентах хода задвижки в обоих направлениях. Соответственно, график 250 может содержать две точки с разными давлениями исполнительного механизма для одного и того же процента хода задвижки: одна точка, соответствующая движению в направлении полностью закрытого положения, и другая точка, соответствующая движению в направлении полностью открытого положения.
[0053] Для определения состояния стопорения задвижки или другого аномального состояния контроллер 18 задвижки может применять следующие критерии приемлемости: для перемещения задвижки между частично открытым положением 352 (который обычно соответствует PST_STRK_TRAV) и пороговым значением 354 останова, контроллер 18 задвижки определяет, находится ли давление исполнительного механизма между двумя фиксированными значениями, минимальным давлением исполнительного механизма и максимальным давлением исполнительного механизма. Однако для учета усилий, необходимых для прерывания жесткого останова, которые могут быть больше рабочего усилия, контроллер 18 задвижки определяет пороговое значение 354 останова в процентах от хода задвижки (например, 5%) и определяет более допустимые критерии для этой области.
[0054] Как показано на фиг. 5, контроллер 18 задвижки определяет, превышает ли давление исполнительного механизма давление 360 прерывания, и не применяет верхний предел к давлению исполнительного механизма в области между пороговым значением 354 останова и жестким остановом. Таким образом, контроллер 18 задвижки учитывает ожидаемые высокие давления исполнительного механизма в этой области и не сигнализирует об отказе при обработке точек данных, показанных в виде графика 350, поскольку эти точки данных фактически описывают нормальное поведение отсекающей задвижки. На фиг. 5 области, соответствующие возможным проблемам, заштрихованы, а области, в которых точка данных давления-хода может быть расположена без срабатывания предупреждающего сигнала, остаются незаштрихованными.
[0055] Как показано на фиг. 1, применение критериев приемлемости, показанных на фиг. 5, также может быть выполнено на рабочей станции 40 как часть этапа постобработки. В более общем плане контроллер 18 задвижки может записывать результаты измерений давления исполнительного механизма и хода задвижки в любом подходящем хранилище данных, включая облачное хранилище данных, а авторизованный пользователь может получить доступ к этим данным локально или удаленно с использованием выделенной рабочей станции или компьютера общего назначения.
Примеры способов
[0056] Для большей ясности примеры способов, которые могут быть осуществлены в контроллере 18 задвижки, рабочая станция 40 или другое подходящее вычислительное устройство описаны ниже со ссылкой на фиг. 6 и 7. Способы по фиг. 6 и 7 могут быть осуществлены в виде наборов команд на каком-либо одном или нескольких подходящих языках программирования и сохранены на компьютерочитаемом носителе.
[0057] Как показано вначале на фиг. 6, способ 400 создания сигнала заданной позиции для испытаний при неполном ходе отсекающей задвижки начинается на этапе 402, на котором принимают минимально допустимое пороговое значение смещения хода PST_STRK_TRAV вместе со скоростью (скоростями) изменения сигнала заданной позиции в одном или обоих направлениях (PST_RAMP_RATE, PST_RAMP_RATE_RETURN) и выбором опережающего реверсирования (ДА/НЕТ). В зависимости от варианта реализации эти параметры могут быть получены от оператора, из файла конфигурации или из автоматизированной задачи.
[0058] На этапе 404 первое намеченное значение заданной позиции PST_SP_CHANGE определяют на основе значения PST_STRK_TRAV путем умножения этого значения на определенный коэффициент, добавления заданного значения или другим подходящим способом. Максимальное пороговое значение смещения хода, PST_STRK_MAX_TRAV, определяют, как правило, аналогично способу на этапе 406.
[0058] Затем сигнал заданной позиции быстро линейно изменяют от исходного положения до первого намеченного значения в соответствии с указанной скоростью. Если на этапе 410 определено, что ход задвижки достиг параметра PST_SP_CHANGE, технологический маршрут переходит на этап 412, где проверяют выбор опережающего реверсирования. Если опережающее реверсирование не было задействовано, заданная позиция остается на уровне первого намеченного значения для числа секунд PST_SP_PAUSE. В противном случае, если опережающее реверсирование было задействовано, технологический маршрут переходит на этап 414, где сигнал заданной позиции изменяют с учетом текущего сигнала хода. В частности, как описано выше со ссылкой на фиг. 4B и 4C, контроллер 18 задвижки может проверять, опережает ли сигнал заданной позиции сигнал хода, или сигнал хода опережает сигнал заданной позиции, и выполнять мгновенную настройку до заданной позиции, соответственно.
[0060] Далее, на этапе 418, заданная позиция быстро линейно изменяется в обратном направлении в соответствии с параметром PST_RAMP_RATE_RETURN в направлении второго намеченного значения, которое может соответствовать начальному значению, дополненному значением ускорения (например, PST_SP_OVER). Как только сигнал заданной позиции достигает второго намеченного значения, на этапе 422 задействуется резкое отключение. Дополнительно или альтернативно, положение задвижки может быть контролируемым, так что, когда сигнал хода достигает жесткого останова, к сигналу заданной позиции применяется резкое отключение.
[0061] Фиг. 7 представляет схему последовательности операций примера способа 500 для определения состояния стопорения отсекающей задвижки. Способ 500 начинается со сбора критериев приемлемости для применения к точкам данных давления исполнительного механизма / хода задвижки. Используемый здесь термин «критерий приемлемости» может относиться к коэффициенту, применяемому к точке данных, для определения того, находится ли точка данных в допустимом диапазоне.
[0062] Более конкретно, процент порогового значения останова принимают от предварительно настроенной константы или оператора, например, на этапе 502. Затем на этапах 504 и 506, соответственно, принимают максимальное и минимальное давление исполнительного механизма. Предел давления прерывания определяют для области вблизи положения останова для определения другого критерия приемлемости, как показано на фиг. 5.
[0063] Давление исполнительного механизма и ход задвижки отслеживают во время PST на этапе 510 для сбора набора точек данных. Альтернативно, набор точек данных принимают из базы данных или другого запоминающего устройства, когда способ 500 выполняется как часть постобработки. Критерии приемлемости, собранные на этапах 502-508, применяют к точкам данных, чтобы определить, превышает ли какая-либо из этих точек критерии приемлемости с точки зрения давления исполнительного механизма, хода задвижки или того и другого. Соответственно, технологический маршрут переходит на этап 514, когда точки данных указывают на нормальное поведение, или на этап 516, когда точки данных указывают на возможную проблему. На этапе 516 может быть создано предупреждение, или оператор (операторы) может быть уведомлен иным образом. Если на этапе 516 определено состояние стопорения задвижки, испытания прерываются, и сигнал заданной позиции может линейно вернуться назад или вернуться к жесткому останову.
Общие примечания
[0064] Если специально не указано иное, описание в данном документе с использованием таких слов как «обработка», «вычисление», «расчет», «определение», «идентификация», «представление», «отображение» или других может относиться к действиям или процессам вычислительной машины (например, компьютера), которая манипулирует данными, или преобразует данные, представленные как физические (например, электронные, магнитные или оптические) величины в одном или больше запоминающих устройств (например, энергозависимой памяти, энергонезависимой памяти, или их сочетании), регистрах, или других компонентах вычислительной машины, которая принимает, сохраняет, передает или отображает информацию.
[0065] Будучи реализованным в программном обеспечении, любое из приложений, сервисов, механизмов, подпрограмм и модулей, описанных в настоящем документе, может сохраняться в любой материальной, энергонезависимой компьютерочитаемой памяти, такой как магнитный диск, лазерный диск, твердотельное запоминающее устройство, запоминающее устройство с молекулярной памятью, оптический диск или другой носитель данных в ОЗУ или ПЗУ компьютера или процессора и т. п. Хотя в настоящем документе раскрыты примеры систем, включающих среди других компонентов, программное обеспечение и/или встроенное программное обеспечение, реализуемое на аппаратуре, следует иметь в виду, что такие системы просто имеют иллюстративный характер и не должны рассматриваться как ограничивающие. Например, предполагается что все или любой из компонентов данного аппаратного обеспечения, программного обеспечения и встроенного программного обеспечения может быть воплощен исключительно в аппаратном обеспечении, исключительно в программном обеспечении или в любом сочетании аппаратного обеспечения и программного обеспечения. Соответственно, специалистам в данной области будет понятно, что представленные примеры не являются единственным способом реализации таких систем.
[0066] Таким образом, хотя способы согласно настоящему изобретению описаны со ссылкой на конкретные примеры, которые предназначены только для иллюстрации, а не для ограничения объема изобретения, специалистам в данной области должно быть понятно, что для раскрытых вариантов осуществления могут быть выполнены изменения, дополнения или исключения без отступления от сущности и объема данного изобретения.
Регулировочный винт, приводимый в действие различными инструментами
Металлическая уплотнительная прокладка с эластомерной подложкой для использования с регуляторами для текучей среды
Регулятор для текучей среды и дросселирующий элемент для такого регулятора
Двунаправленный преобразователь постоянного тока в постоянный для управления накопителем энергии при отводе энергии
Способ и устройство для выравнивания положения кольца седла в клапане
Способ и устройство для определения положения клапана
Приводное устройство с регулируемым расходом для использования с автоматическими запорными клапанами
Измерительная трубка для газового регулятора, имеющая функцию усреднения давления
Антенный блок для использования во взрывоопасной среде
Устройство для регулирования расхода текучей среды, имеющее фиксатор для кольца седла
Объемный бустер с дискретным регулированием мощности
Объемный бустер с переменной асимметрией
Устройство для регулирования расхода текучей среды (варианты)
Способ и устройство для оценки виброустойчивости компонента клапана управления текучей средой
Модуль данных компонента, содержащий встроенный интерфейс связи ближнего действия
Способ и устройства для дальней связи rfid в системе управления технологическим процессом
Способ и устройство для управления и обслуживания периферийных устройств системы управления процессами с использованием устройств для радиочастотной идентификации (rfid)
Способ и устройство для управления регулирующим клапаном посредством цепи управления, а также для выявления неисправностей в этой цепи
Объемный бустер с асимметричным режимом потока для приводов клапанов (варианты)
Вентиляционное устройство и способ вентиляции с применением цифрового клапанного позиционера

