Результат интеллектуальной деятельности: Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый"
Вид РИД
Изобретение
Предлагаемое изобретение относится к области обработки радиолокационных сигналов и может быть использовано в бортовой радиолокационной станции (БРЛС) самолета для одновременного формирования при сопровождении летательных аппаратов пары достоверных оценок их функционального назначения (ФН) по принципу «ведущий-ведомый» и радиальных функционально-связанных координат (ФСК) взаимного перемещения этих летательных аппаратов (ЛА) и самолета – носителя БРЛС.
Известен способ распознавания ФН самолетов пары по принципу «ведущий-ведомый», летящих в сомкнутом боевом порядке (БП) [1], заключающийся в том, что сигнал, отражённый от самолетов пары, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, определяются отсчёты доплеровских частот соответствующие отражениям сигнала от планеров самолетов, c амплитудами спектральных составляющих спектра сигнала превышающими заданный порог, которые поступают на вход двух фильтров сопровождения пары самолетов, различающихся наборами параметров используемых математических моделей (ММ) динамики ФСК и функционирующих в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации [1]
 ; (1)
; (1)
 ; (2)
; (2)
 ; (3)
; (3)
 ; (4)
; (4)
 ; (5)
; (5)
 , (6)
, (6)
где
k = 0,1, …, К, …, – номер такта работы фильтра;
 и P(k+1) – ковариационные матрицы (КМ) ошибок экстраполяции и фильтрации соответственно;
и P(k+1) – ковариационные матрицы (КМ) ошибок экстраполяции и фильтрации соответственно;
Ф(k) – переходная матрица состояния;
Q(k+1) и R(k+1) – КМ шумов возбуждения и наблюдения соответственно;
S(k+1) – матрица весовых коэффициентов;
I - единичная матрица;
 (k) – вектор апостериорных оценок радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС;
(k) – вектор апостериорных оценок радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС;
Н(k+1) – матрица наблюдения;
Y(k) – вектор наблюдения;
Z(k+1) – матрица невязок измерения;
Ψ(k+1) – матрица априорных ошибок фильтрации;
"-1" – операция вычисления обратной матрицы;
"т" – операция транспонирования матрицы,
основанной на априорных данных в виде ММ линейной динамики радиальных ФСК взаимного перемещения самолетов пары и истребителя – носителя БРЛС
 , (7)
, (7)
и ММ их измерений в БРЛС
 , (8)
, (8)
где
 – вектор радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС;
– вектор радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС;
 – нижняя треугольная матрица симметричного разложения КМ шумов возбуждения
– нижняя треугольная матрица симметричного разложения КМ шумов возбуждения  в дискретном времени;
в дискретном времени;
 – нижняя треугольная матрица симметричного разложения КМ шумов наблюдения
– нижняя треугольная матрица симметричного разложения КМ шумов наблюдения  в дискретном времени;
в дискретном времени;
 ,
,  – независимые вектора нормированных дискретных белых шумов,
– независимые вектора нормированных дискретных белых шумов,
в каждом фильтре определяется апостериорная оценка  вектора радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС, определяется обобщенная дисперсия
вектора радиальных ФСК взаимного перемещения пары самолетов и носителя БРЛС, определяется обобщенная дисперсия  действительных ошибок фильтрации для всех компонент вектора ФСК в соответствии с выражением
действительных ошибок фильтрации для всех компонент вектора ФСК в соответствии с выражением
 , (9)
, (9)
на основе ММ (7) динамики ФСК, включающих радиальные флюктуационные составляющие скоростей и ускорений летательных аппаратов пары, в непрерывном времени
 (10)
(10)
 (11)
(11)
 (12)
(12)
 , (13)
, (13)
где ΔVi(t) и ΔV0i – флюктуационная составляющая скорости первого (i = 1) и второго (i = 2) самолетов и ее начальное значение соответственно;
аi(t) и а0i – флюктуационная составляющая ускорения первого (i = 1) и второго (i = 2) самолетов и ее начальное значение соответственно;
αj, βj, σ2j – параметры модели полета самолетов пары, определяющие их ФН в группе и вычисляемые по формулам
αj = 1/τj; βj = (2π fj)2; σ2j = σ2vj (α2j + βj);
τj, fj и σvj – соответственно время корреляции, частота и среднеквадратическое отклонение (СКО) скоростных флюктуаций первого (j = 1) и второго (j = 2) самолетов;
n(t) – формирующий белый гауссовский шум с нулевым математическим ожиданием (МО) и единичной интенсивностью,
из возможных вариантов ФН самолетов пары идентифицируется тот, которому соответствуют параметры ММ, используемой в фильтре, дающем наименьшую обобщенную дисперсию (9) ошибок оценивания, найденная оценка варианта ФН самолетов пары и оценки радиальных ФСК взаимного перемещения этих ВЦ и истребителя – носителя БРЛС, выдаваемые фильтром с наименьшей обобщенной дисперсией, подаются на выход канала сопровождения пары самолетов в БРЛС.
Недостатком данного способа распознавания функционального назначения самолетов пары является низкая достоверность оценок радиальных ФСК взаимного перемещения этих самолетов и носителя БРЛС, и варианта их ФН в следствие:
1. Не оптимальности, определяемых на его основе оценок ФСК, так как они находятся при условии справедливости гипотезы о фактическом варианте ФН самолетов пары, которая носит вероятностный характер, а значит, оценки являются условно-оптимальными.
2. Отсутствия возможности комплексирования информации БРЛС, измеряющей ФСК, и индикатора варианта ФН самолетов пары.
3. Отсутствия возможности учитывать априорные данные о смене вариантов ФН самолетов пары.
Технической задачей изобретения является повышение достоверности распознавания ФН летательных аппаратов пары и оценки радиальных скоростей сближения этих ВЦ с самолетом – носителем БРЛС путем приближения получаемых оценок к их оптимальным значениям за счет комплексирования информации БРЛС и индикатора варианта ФН летательных аппаратов пары, учета априорных данных о смене этих вариантов и адаптации фильтра к ней.
Для решения технической задачи в способе распознавания ФН летательных аппаратов пары по принципу «ведущий-ведомый» [1], летящих в сомкнутом БП, заключающемся в том, что сигнал, отражённый от летательных аппаратов пары, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, определяются отсчёты доплеровских частот соответствующие отражениям сигнала от планеров летательных аппаратов, c амплитудами спектральных составляющих спектра сигнала превышающими заданный порог, которые дополнительно поступают на вход многоканального фильтра совместного сопровождения летательных аппаратов пары и распознавания варианта их ФН, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы
 ; (14)
; (14)
 ; (15)
; (15)


 ; (16)
; (16)
 ; (17)
; (17)
 ; (18)
; (18)
 ; (19)
; (19)
 ; (20)
; (20)
 ; (21)
; (21)
 ; (22)
; (22)
 ; (23)
; (23)
 ; (24)
; (24)
 ; (25)
; (25)
 , (26)
, (26)
основанной на априорных данных в виде ММ системы «пара летательных аппаратов – БРЛС – индикатор» со случайной скачкообразной структурой (ССС), включающей модель линейной динамики радиальных ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС
 ; (27)
; (27)
модель измерений этих фазовых координат в БРЛС
 ; (28)
; (28)
модель смены варианта ФН летательных аппаратов пары
 ; (29)
; (29)
модель индикатора варианта ФН летательных аппаратов пары
 ; (30)
; (30)
модель неуправляемых случайных возмущений и помех
 ; (31)
; (31)
при начальных условиях
 , (32)
, (32)
где
 – дискретный момент времени;
– дискретный момент времени;
 – вектор радиальных ФСК взаимного перемещения летательных аппаратов пары и истребителя – носителя БРЛС;
– вектор радиальных ФСК взаимного перемещения летательных аппаратов пары и истребителя – носителя БРЛС;
 – вариант ФН самолетов пары (
– вариант ФН самолетов пары ( – ведущим является первый самолет, ведомым – второй;
– ведущим является первый самолет, ведомым – второй;  – ведущим является второй самолет, ведомым – первый);
– ведущим является второй самолет, ведомым – первый);
 – вектор измерений БРЛС;
– вектор измерений БРЛС;
 – выходные показания индикатора варианта ФН летательных аппаратов пары;
– выходные показания индикатора варианта ФН летательных аппаратов пары;
 – условные вероятности смены варианта ФН летательных аппаратов пары;
– условные вероятности смены варианта ФН летательных аппаратов пары;
 – условные вероятности смены показаний индикатора варианта ФН летательных аппаратов пары;
– условные вероятности смены показаний индикатора варианта ФН летательных аппаратов пары;
 ,
,  ,
,  и
и  ,
,  ,
,  – прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности полета пары летательных аппаратов с
– прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности полета пары летательных аппаратов с  вариантом ФН, условные математические ожидания ФСК при фиксированном варианте ФН летательных аппаратов пары, условные КМ ошибок оценивания ФСК при фиксированном варианте ФН летательных аппаратов пары;
вариантом ФН, условные математические ожидания ФСК при фиксированном варианте ФН летательных аппаратов пары, условные КМ ошибок оценивания ФСК при фиксированном варианте ФН летательных аппаратов пары;
 – квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта ФН летательных аппаратов пары;
– квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта ФН летательных аппаратов пары;
 – апостериорное безусловное математическое ожидание ФСК;
– апостериорное безусловное математическое ожидание ФСК;
 – апостериорная безусловная КМ ошибок оценивания ФСК;
– апостериорная безусловная КМ ошибок оценивания ФСК;
 ,
,  – КМ соответственно векторов шумов возбуждения
– КМ соответственно векторов шумов возбуждения  и помех
и помех  ;
;
 ,
,  – стандартные дискретные векторные белые шумы;
– стандартные дискретные векторные белые шумы;
 – условная КМ измерения при фиксированном варианте воздействия уводящих помех;
– условная КМ измерения при фиксированном варианте воздействия уводящих помех;
 ,
,  – известные матрицы детерминированных функций от варианта
– известные матрицы детерминированных функций от варианта  ФН летательных аппаратов пары;
ФН летательных аппаратов пары;
 ,
,  – известные матрицы коэффициентов;
– известные матрицы коэффициентов;
 – обратная матрица по отношению к матрице
– обратная матрица по отношению к матрице  ;
;
 – операция транспонирования матрицы;
– операция транспонирования матрицы;
 – определитель матрицы
– определитель матрицы  ;
;
 – экспоненциальная функция,
– экспоненциальная функция,
определяется оценка варианта ФН летательных аппаратов пары, определяется оценка безусловного математического ожидания ФСК, определяется оценка безусловной КМ ошибок оценивания ФСК, на основе усовершенствованной ММ (27) динамики радиальных ФСК, включающих флюктуационные составляющие радиальных скоростей и ускорений взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, которая в непрерывном времени отличается от известной (10)–(13) тем, что в случайные моменты времени, интервалы между которыми распределены по экспоненциальному закону, параметры модели α1, β1, σ21 и α2, β2, σ22 могут меняться местами друг с другом, что интерпретируется как смена ФН летательных аппаратов пары по принципу «ведущий-ведомый» в результате их перестроения
(33)
 (34)
(34)
(35)
 , (36)
, (36)
модель представлена в процедуре (14)–(26) матрицами  и
и  , размерностями
, размерностями  , ненулевыми элементами которых являются соответственно
, ненулевыми элементами которых являются соответственно  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  , где
, где  – период дискретизации, и на основе ММ (28) измерений в БРЛС функционально-связанных координат, представляемой в процедуре (14)–(26) матрицами
– период дискретизации, и на основе ММ (28) измерений в БРЛС функционально-связанных координат, представляемой в процедуре (14)–(26) матрицами  и
и  , размерностями
, размерностями  и
и  , ненулевыми элементами которых являются соответственно
, ненулевыми элементами которых являются соответственно  ,
,  и
и  ,
,  .
.
Новыми признаками, обладающими существенными отличиями, являются:
1. Применение многоканального фильтра совместных сопровождения летательных аппаратов пары и распознавания варианта их ФН, функционирующего в соответствии с процедурой (14)–(26) квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы вместо двух фильтров сопровождения пары летательных аппаратов, функционирующих в соответствии с процедурой (1)–(6) многомерной линейной дискретной калмановской фильтрации.
2. Комплексирование в (17) информации БРЛС, измеряющей ФСК, и индикатора варианта ФН летательных аппаратов пары с моделью (30).
3. Учет априорных данных о смене варианта ФН летательных аппаратов пары в виде условных вероятностей переходов (29).
4. Коррекция оценок (15), (16), (25), (26) ФСК, полученных на основе модели (27) и измерений (28), по оцененным вероятностям (17) полета пары летательных аппаратов с соответствующим вариантом ФН и априорным данным (29) о смене варианта ФН летательных аппаратов пары (адаптация фильтра к различным вариантам ФН летательных аппаратов пары).
5. Прогнозирование (14) вероятностей  полета пары летательных аппаратов с каждым вариантом ФН на один шаг дискретности вперед на основе априорных данных о смене варианта ФН летательных аппаратов пары, представленных соответственно начальными (32) и переходными (29) вероятностями цепи Маркова.
полета пары летательных аппаратов с каждым вариантом ФН на один шаг дискретности вперед на основе априорных данных о смене варианта ФН летательных аппаратов пары, представленных соответственно начальными (32) и переходными (29) вероятностями цепи Маркова.
6. Прогнозирование (15) на один шаг дискретности вперед условных математических ожиданий  ФСК при фиксированном варианте ФН летательных аппаратов пары с учетом найденных вероятностей, на основе априорных данных (29) о смене варианта ФН летательных аппаратов пары и альтернативных моделей (27) динамики ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС.
ФСК при фиксированном варианте ФН летательных аппаратов пары с учетом найденных вероятностей, на основе априорных данных (29) о смене варианта ФН летательных аппаратов пары и альтернативных моделей (27) динамики ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС.
7. Прогнозирование (16) на один шаг дискретности вперед условных КМ  ошибок оценивания ФСК при фиксированном варианте ФН летательных аппаратов пары, с учетом найденных вероятностей (14) и МО (15), на основе априорных данных о смене варианта ФН и альтернативных моделей динамики ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС.
ошибок оценивания ФСК при фиксированном варианте ФН летательных аппаратов пары, с учетом найденных вероятностей (14) и МО (15), на основе априорных данных о смене варианта ФН и альтернативных моделей динамики ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС.
8. Оценка (17) апостериорных вероятностей  полета пары летательных аппаратов с каждым вариантом ФН, по степени согласованности (20)–(23) спрогнозированных вероятностей (14), математических ожиданий ФСК (15) и КМ (16) ошибок их оценивания с результатами измерений в (23) и показаниями индикатора в (20).
полета пары летательных аппаратов с каждым вариантом ФН, по степени согласованности (20)–(23) спрогнозированных вероятностей (14), математических ожиданий ФСК (15) и КМ (16) ошибок их оценивания с результатами измерений в (23) и показаниями индикатора в (20).
9. Оценка (18) условных апостериорных математических ожиданий  ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, при фиксированном варианте ФН летательных аппаратов пары, на основе спрогнозированных МО (15) и КМ (16) ошибок прогноза с учетом результатов измерения в (23).
ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, при фиксированном варианте ФН летательных аппаратов пары, на основе спрогнозированных МО (15) и КМ (16) ошибок прогноза с учетом результатов измерения в (23).
10. Оценка (19) условных апостериорных КМ  ошибок оценивания ФСК, при фиксированном варианте ФН летательных аппаратов пары, на основе спрогнозированных МО (15) и КМ (16) ошибок прогноза с учетом результатов измерения в (23).
ошибок оценивания ФСК, при фиксированном варианте ФН летательных аппаратов пары, на основе спрогнозированных МО (15) и КМ (16) ошибок прогноза с учетом результатов измерения в (23).
11. Идентификация (24) такого  варианта ФН летательных аппаратов пары, для которого найденная апостериорная вероятность (17) окажется больше.
варианта ФН летательных аппаратов пары, для которого найденная апостериорная вероятность (17) окажется больше.
12. Нахождение (25) безусловной оценки  ФСК на основе апостериорных вероятностей (17) полета пары летательных аппаратов с каждым вариантом ФН и условных апостериорных оценок (18) ФСК, как безусловного МО.
ФСК на основе апостериорных вероятностей (17) полета пары летательных аппаратов с каждым вариантом ФН и условных апостериорных оценок (18) ФСК, как безусловного МО.
13. Нахождение (26) безусловной КМ  ошибок оценивания ФСК с учетом найденных апостериорных вероятностей (17) полета пары летательных аппаратов с каждым вариантом ФН, условных математических ожиданий (18) ФСК, условных КМ (19) ошибок их оценивания и безусловных оценок (25) ФСК.
ошибок оценивания ФСК с учетом найденных апостериорных вероятностей (17) полета пары летательных аппаратов с каждым вариантом ФН, условных математических ожиданий (18) ФСК, условных КМ (19) ошибок их оценивания и безусловных оценок (25) ФСК.
Данные признаки являются существенными и в известных технических решениях не обнаружены.
Применение всех новых существенных признаков позволит достоверно распознать вариант ФН летательных аппаратов пары с одновременным формированием достоверных безусловных оценок радиальных ФСК взаимного перемещения этих ЛА и самолета– носителя БРЛС путем приближения получаемых оценок к их оптимальным значениям за счет комплексирования информации БРЛС и индикатора варианта ФН летательных аппаратов пары, учета априорных данных о смене этих вариантов и адаптации фильтра к ней.
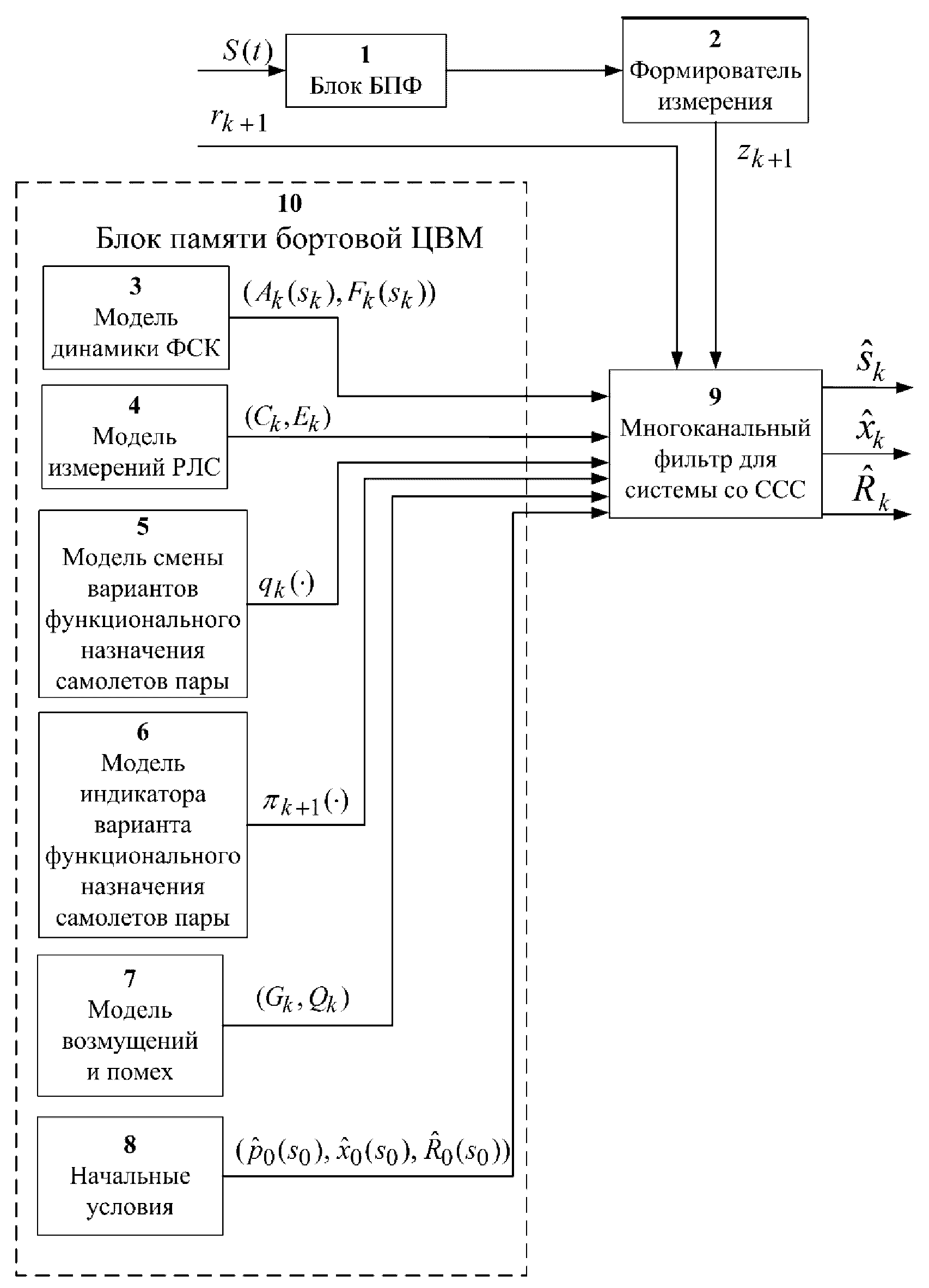
На фиг. приведена блок-схема, поясняющая реализацию предлагаемого способа распознавания ФН летательных аппаратов пары по принципу «ведущий-ведомый».
Способ распознавания ФН летательных аппаратов пары по принципу «ведущий-ведомый» осуществляется следующим образом.
На вход известного блока 1 БПФ, используемого в [3], на промежуточной частоте с выхода приёмника БРЛС поступает сигнал S(t), отражённый от летательных аппаратов пары, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, в котором присутствуют составляющие обусловленные отражениями сигнала от планеров сопровождаемых ЛА.
В известном формирователе 2 измерения, используемом в [3], во-первых, определяются отсчёты доплеровских частот  и
и  , соответствующие двум максимальным амплитудам спектральных составляющих спектра сигнала, которые соответствуют его отражениям от планеров летательных аппаратов пары, во-вторых, данные отсчёты доплеровских частот преобразуются в значения скоростей, как
, соответствующие двум максимальным амплитудам спектральных составляющих спектра сигнала, которые соответствуют его отражениям от планеров летательных аппаратов пары, во-вторых, данные отсчёты доплеровских частот преобразуются в значения скоростей, как  ,
,  (где
(где  – рабочая длина волны БРЛС).
– рабочая длина волны БРЛС).
В результате на выходе блока 2 формируется измерение  , которое поступает на вход нового многоканального фильтра 9 совместных сопровождения летательных аппаратов пары и распознавания варианта их ФН, функционирующего в соответствии с известной процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы (14)–(26), структурная схема которой и описание приводятся в [2], работающего на основе априорных данных в виде ММ системы «пара летательных аппаратов – БРЛС – индикатор» со ССС, включающей (блок 10 памяти бортовой ЦВМ) модель (33)–(36) линейной динамики радиальных ФСК 3 взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, представленную матрицами
, которое поступает на вход нового многоканального фильтра 9 совместных сопровождения летательных аппаратов пары и распознавания варианта их ФН, функционирующего в соответствии с известной процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы (14)–(26), структурная схема которой и описание приводятся в [2], работающего на основе априорных данных в виде ММ системы «пара летательных аппаратов – БРЛС – индикатор» со ССС, включающей (блок 10 памяти бортовой ЦВМ) модель (33)–(36) линейной динамики радиальных ФСК 3 взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, представленную матрицами  , модель измерений ФСК в БРЛС 4, представленную матрицами
, модель измерений ФСК в БРЛС 4, представленную матрицами  , модель смены варианта ФН летательных аппаратов пары 5, представленную переходными вероятностями
, модель смены варианта ФН летательных аппаратов пары 5, представленную переходными вероятностями  , модель индикатора варианта ФН летательных аппаратов пары 6, представленную переходными вероятностями
, модель индикатора варианта ФН летательных аппаратов пары 6, представленную переходными вероятностями  , модель неуправляемых случайных возмущений и помех 7 при начальных условиях 8, также поступающих на вход многоканального фильтра 9.
, модель неуправляемых случайных возмущений и помех 7 при начальных условиях 8, также поступающих на вход многоканального фильтра 9.
При этом в фильтре 9 осуществляется комплексирование информации БРЛС и индикатора варианта ФН летательных аппаратов пары, заключающееся в совместном использовании двух независимых источников информации (БРЛС и индикатора варианта ФН). На основе выходных сигналов  и
и  разнотипных датчиков информации – БРЛС и индикатора варианта ФН летательных аппаратов пары фильтр формирует оценки варианта ФН летательных аппаратов пары и ФСК , включающих радиальные флюктуационные составляющие скоростей и ускорений летательных аппаратов пары, с точностью, превышающей достижимую при раздельном использовании датчиков.
разнотипных датчиков информации – БРЛС и индикатора варианта ФН летательных аппаратов пары фильтр формирует оценки варианта ФН летательных аппаратов пары и ФСК , включающих радиальные флюктуационные составляющие скоростей и ускорений летательных аппаратов пары, с точностью, превышающей достижимую при раздельном использовании датчиков.
Особенность реализуемого комплексирования состоит в следующем: объект наблюдения (пара летательных аппаратов) характеризуется составным вектором  , где
, где  определяет ФН летательных аппаратов пары по принципу «ведущий-ведомый», а
определяет ФН летательных аппаратов пары по принципу «ведущий-ведомый», а  – радиальные скорости сближения этих летательных аппаратов с носителем БРЛС, причем в соответствии с (27) динамика компоненты зависит от , что отражает особенность пилотирования пары летательных аппаратов, а именно, у ведомых летательных аппаратов группы имеются дополнительные скоростные флюктуации, обусловленные их стремлением сохранить заданные дистанции соответствующего боевого порядка, вследствие чего характер изменения скоростей, соответствующих ведомым летательным аппаратам, существенно отличается от динамики скорости, соответствующей ведущему летательному аппарату. Таким образом, информация о скоростях сближения позволяет косвенным образом судить о варианте ФН летательных аппаратов пары. Из (27) также следует, что дополнительная информация о варианте ФН летательных аппаратов пары позволяет повысить точность прогнозирования скоростей сближения .
– радиальные скорости сближения этих летательных аппаратов с носителем БРЛС, причем в соответствии с (27) динамика компоненты зависит от , что отражает особенность пилотирования пары летательных аппаратов, а именно, у ведомых летательных аппаратов группы имеются дополнительные скоростные флюктуации, обусловленные их стремлением сохранить заданные дистанции соответствующего боевого порядка, вследствие чего характер изменения скоростей, соответствующих ведомым летательным аппаратам, существенно отличается от динамики скорости, соответствующей ведущему летательному аппарату. Таким образом, информация о скоростях сближения позволяет косвенным образом судить о варианте ФН летательных аппаратов пары. Из (27) также следует, что дополнительная информация о варианте ФН летательных аппаратов пары позволяет повысить точность прогнозирования скоростей сближения .
На основании (17), (20) видно, что коррекция спрогнозированных вероятностей полета пары летательных аппаратов с соответствующим ФН осуществляется как по показаниям индикатора ФН летательных аппаратов пары, так и по результатам измерений БРЛС, причем совместное использование двух независимых источников информации позволяет улучшить точность оценивания этих вероятностей, в сравнении с использованием только БРЛС или только индикатора.
Как следует из (18), (25) оценка ФСК формируется как с учетом измерений БРЛС через  и
и  , так и с учетом показаний индикатора через , что также позволяет улучшить точность оценивания этих ФСК, в сравнении с использованием только БРЛС.
, так и с учетом показаний индикатора через , что также позволяет улучшить точность оценивания этих ФСК, в сравнении с использованием только БРЛС.
Сформированные на выходе многоканального фильтра 9 оценки варианта ФН летательных аппаратов пары, безусловного математического ожидания ФСК взаимного перемещения летательных аппаратов пары и самолета – носителя БРЛС, безусловной КМ ошибок оценивания ФСК поступают на выход канала сопровождения пары летательных аппаратов в БРЛС.
Результаты сравнительного моделирования предлагаемого способа распознавания ФН летательных аппаратов пары по принципу «ведущий-ведомый» на основе нового многоканального фильтра совместных сопровождения летательных аппаратов пары и распознавания варианта их ФН, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы, и известного способа распознавания ФН летательных аппаратов пары по принципу «ведущий-ведомый», летящих в сомкнутом БП [1] на основе процедуры многомерной линейной дискретной калмановской фильтрации свидетельствуют с доверительной вероятностью 0,95 о снижении СКО ошибки фильтрации на 13% и о повышении вероятности правильного распознавания варианта ФН летательных аппаратов пары на 10%.
Таким образом, применение предлагаемого способа позволит повысить достоверность распознавания варианта ФН летательных аппаратов пары и оценки радиальных ФСК взаимного перемещения этих ЛА и самолета – носителя БРЛС путем приближения получаемых оценок к их оптимальным значениям за счет комплексирования информации БРЛС и индикатора варианта ФН летательных аппаратов пары, учета априорных данных о смене этих вариантов и адаптации фильтра к ней.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Алгоритм совместного траекторного сопровождения-распознавания функционального назначения самолетов, летящих в сомкнутом боевом порядке / А. В. Богданов, В. А. Голубенко, А. И. Княжев, А. А. Филонов // Системы радиоуправления. – 2018. – № 5. – С. 169–174. (прототип)
2. Бухалев, В. А. Оптимальное сглаживание в системах со случайной скачкообразной структурой / В. А. Бухалев. М.: ФИЗМАТЛИТ, 2013, страницы 115, 116, 117.
3. Богданов А.В., Васильев О.В., Докучаев Я.С. Способ сопровождения воздушной цели из класса «самолёт с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех. Патент на изобретение № 2665031, 2018.
Способ распознавания функционального назначения летательных аппаратов пары по принципу «ведущий-ведомый», заключающийся в том, что сигнал, отражённый от летательных аппаратов пары, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, определяются отсчёты доплеровских частот, соответствующие отражениям сигнала от планеров летательных аппаратов, c амплитудами спектральных составляющих спектра сигнала, превышающими заданный порог, отличающийся тем, что сформированные отсчеты доплеровских частот поступают на вход многоканального фильтра совместного сопровождения летательных аппаратов пары и распознавания варианта их функционального назначения, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы, основанной на априорных данных в виде математической модели системы «пара летательных аппаратов – радиолокационная станция – индикатор» со случайной скачкообразной структурой, включающей модель линейной динамики радиальных функционально-связанных координат взаимного перемещения летательных аппаратов пары и самолета – носителя радиолокационной станции, модель измерений этих фазовых координат в радиолокационной станции, модель смены варианта функционального назначения летательных аппаратов пары, модель индикатора варианта функционального назначения летательных аппаратов пары, модель неуправляемых случайных возмущений и помех, при начальных условиях, осуществляется совместное оценивание функционально-связанных координат и варианта функционального назначения летательных аппаратов пары на основе метода двухмоментной параметрической аппроксимации неизвестных условных плотностей вероятности фазовых координат при фиксированной структуре системы с помощью нескольких каналов фильтрации, различающихся положенной в их основу гипотезой о варианте функционального назначения летательных аппаратов пары, при этом в каждом канале фильтрации на основе априорных данных о смене вариантов функционального назначения летательных аппаратов пары, представленных соответственно начальными и переходными вероятностями цепи Маркова, прогнозируются вероятности полета пары летательных аппаратов с каждым вариантом функционального назначения на один шаг дискретности вперед, с учетом найденных вероятностей, на основе априорных данных о смене вариантов функционального назначения летательных аппаратов пары и альтернативных моделей динамики функционально-связанных координат взаимного перемещения летательных аппаратов пары и носителя радиолокационной станции прогнозируются на один шаг дискретности вперед условные математические ожидания функционально-связанных координат при фиксированном варианте функционального назначения летательных аппаратов пары, с учетом найденных вероятностей и математических ожиданий, на основе априорных данных о смене вариантов функционального назначения летательных аппаратов пары и альтернативных моделей динамики функционально-связанных координат взаимного перемещения летательных аппаратов пары и носителя радиолокационной станции прогнозируются на один шаг дискретности вперед условные ковариационные матрицы ошибок оценивания функционально-связанных координат при фиксированном варианте функционального назначения летательных аппаратов пары, по степени согласованности спрогнозированных вероятностей, математических ожиданий функционально-связанных координат и ковариационных матриц ошибок их оценивания с результатами измерений радиолокационной станции и показаниями индикатора варианта функционального назначения летательных аппаратов пары осуществляется оценка апостериорных вероятностей полета пары летательных аппаратов с каждым вариантом функционального назначения, на основе спрогнозированных математических ожиданий и ковариационных матриц ошибок прогноза с учетом результатов измерения радиолокационной станции находятся условные апостериорные математические ожидания функционально-связанных координат при фиксированном варианте функционального назначения летательных аппаратов пары, на основе спрогнозированных математических ожиданий и ковариационных матриц ошибок прогноза с учетом результатов измерения радиолокационной станции находятся условные апостериорные ковариационные матрицы ошибок оценивания функционально-связанных координат при фиксированном варианте функционального назначения летательных аппаратов пары, на выходе каналов фильтрации из возможных вариантов функционального назначения летательных аппаратов пары выбирается тот, для которого найденная апостериорная вероятность окажется больше, безусловная по отношению к вариантам функционального назначения летательных аппаратов пары оценка функционально-связанных координат вычисляется на основе апостериорных вероятностей полета пары летательных аппаратов с каждым вариантом функционального назначения и условных апостериорных оценок функционально-связанных координат, как безусловное математическое ожидание, с учетом найденных апостериорных вероятностей полета пары летательных аппаратов с каждым вариантом функционального назначения, условных математических ожиданий функционально-связанных координат, условных ковариационных матриц ошибок их оценивания и безусловных оценок функционально-связанных координат находится безусловная по отношению к вариантам функционального назначения летательных аппаратов пары ковариационная матрица ошибок оценивания функционально-связанных координат.
Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Модуль типовых авиационных интерфейсов
Система управления оружием летательного аппарата
Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ поражения площадной цели групповым действием суббоеприпасов кассетных боеприпасов
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа drfm при обнаружении группы самолётов
Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала
Способ получения индивидуального композиционного имплантата на основе альгината натрия и фосфатов кальция для замещения костно-хрящевых дефектов методом трехмерной гелевой печати
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа drfm
Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей
Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа drfm
Способ обеспечения электромагнитной совместимости импульсно-доплеровских бортовых радиолокационных станций группы истребителей
Способ функционирования комплексов средств автоматизации систем обработки информации и управления и устройство, его реализующее

