Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВЫЕЗДЕ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к способу помощи при выезде и к устройству помощи при выезде.
Предпосылки изобретения
[0002] Известна система управления транспортным средством для автоматического выезда с места парковки. Эта система задает позицию выезда и формирует траекторию от места парковки до позиции выезда и, когда обнаруживается помеха в виде стационарного объекта, задает переформированную траекторию, которая позволяет транспортному средству объезжать помеху и достигать позиции выезда (см., например, патентный документ 1: JP2013-177128A).
Документы уровня техники
Патентные документы
[0003] Патентный документ 1. JP2013-177128A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В системе, описанной в патентном документе 1, путь выезда не формируется в соответствии с присутствием или отсутствием припаркованного транспортного средства, смежного с рассматриваемым транспортным средством, и поэтому выбор возможных вариантов для пути выезда узок.
[0005] Проблема, решаемая настоящим изобретением, заключается в том, чтобы предоставить способ помощи при выезде и устройство помощи при выезде, с помощью которых можно расширить выбор возможных вариантов для пути выезда.
Средство решения проблем
[0006] Настоящее изобретение решает вышеуказанную проблему посредством определения того, присутствует ли или нет смежное припаркованное транспортное средство в смежном с начальной позицией выезда парковочном месте, и, когда смежное припаркованное транспортное средство не присутствует, формирования пути выезда, который включает в себя это смежное парковочное место.
Преимущества изобретения
[0007] Согласно настоящему изобретению, возможные варианты для пути выезда могут расширяться.
Краткое описание чертежей
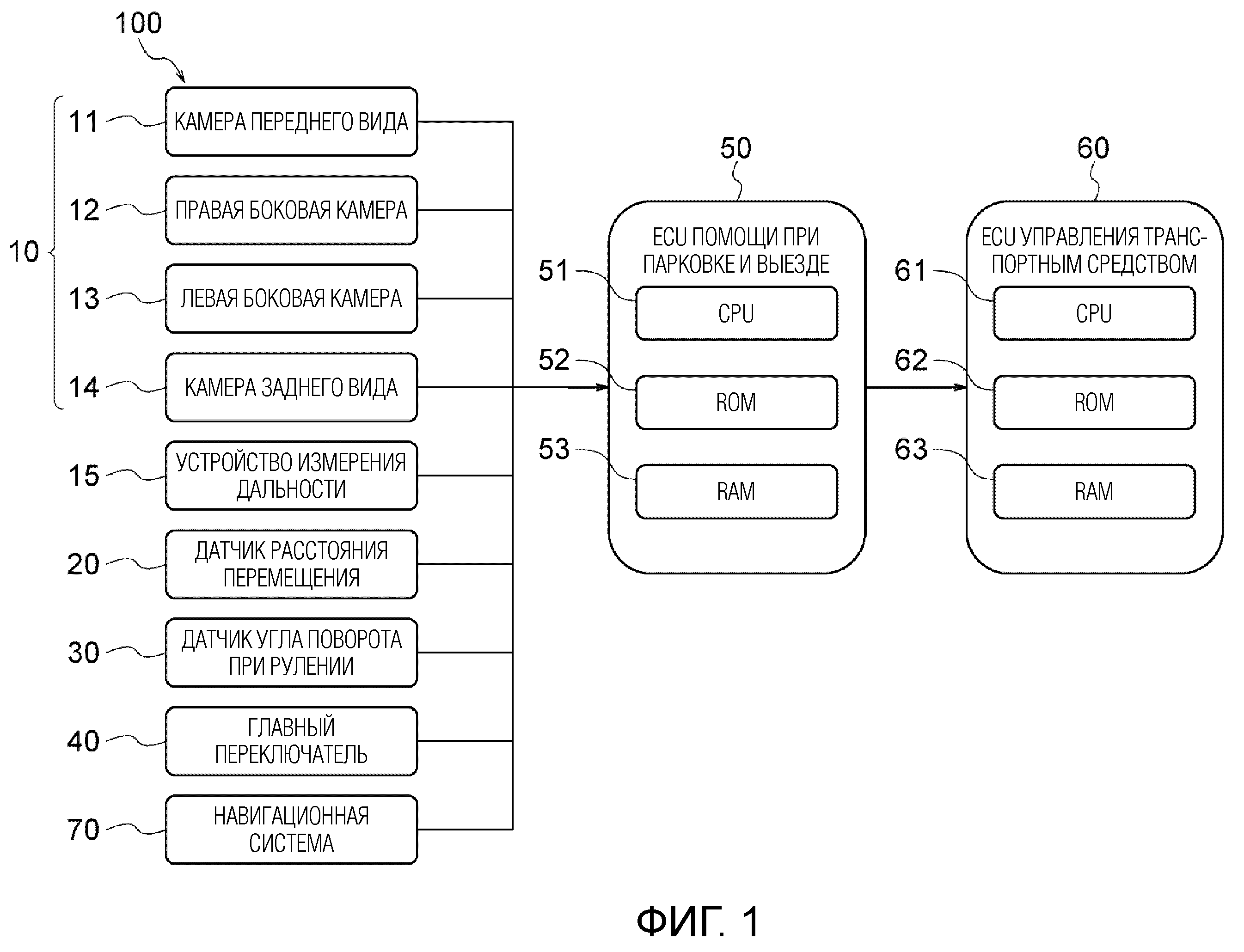
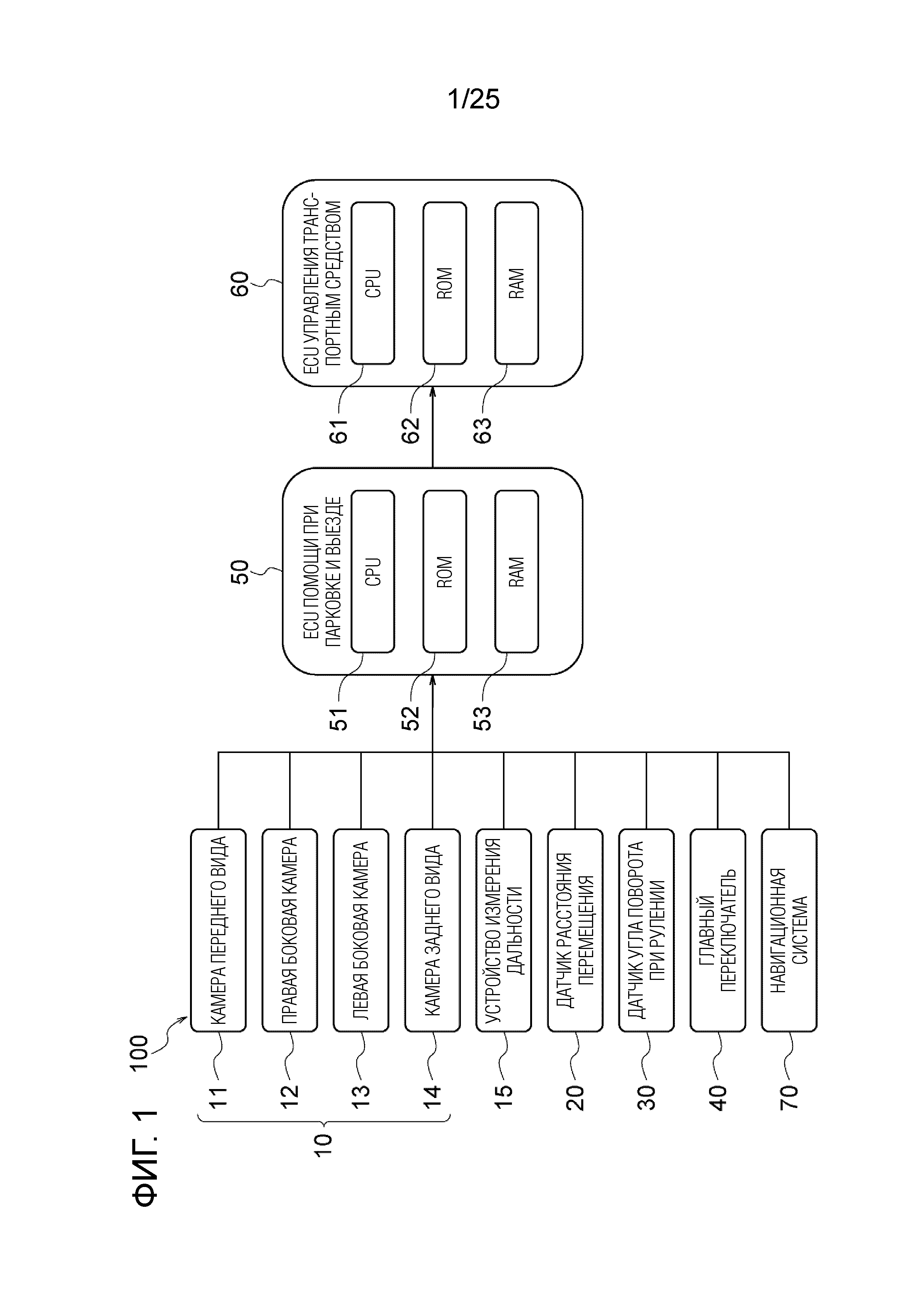
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения.
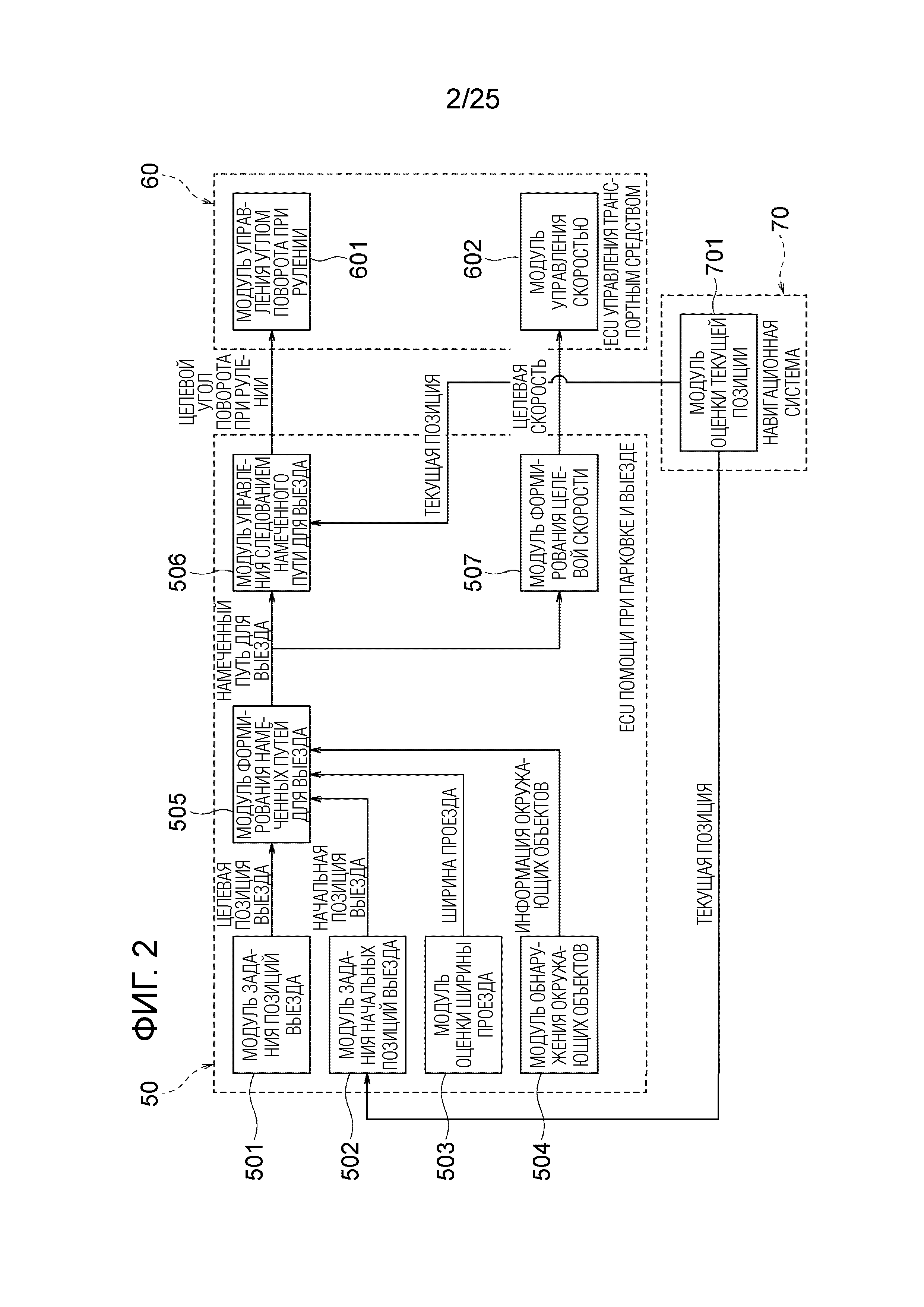
Фиг. 2 является блок-схемой для описания функции помощи при выезде ЭБУ помощи при парковке и выезде по фиг. 1.
Фиг. 3 является набором из таблицы и схем для описания способа задания позиции выезда рассматриваемого транспортного средства, выезжающего передним ходом.
Фиг. 4 является набором из таблицы и схем для описания способа задания позиции выезда рассматриваемого транспортного средства, выезжающего задним ходом.
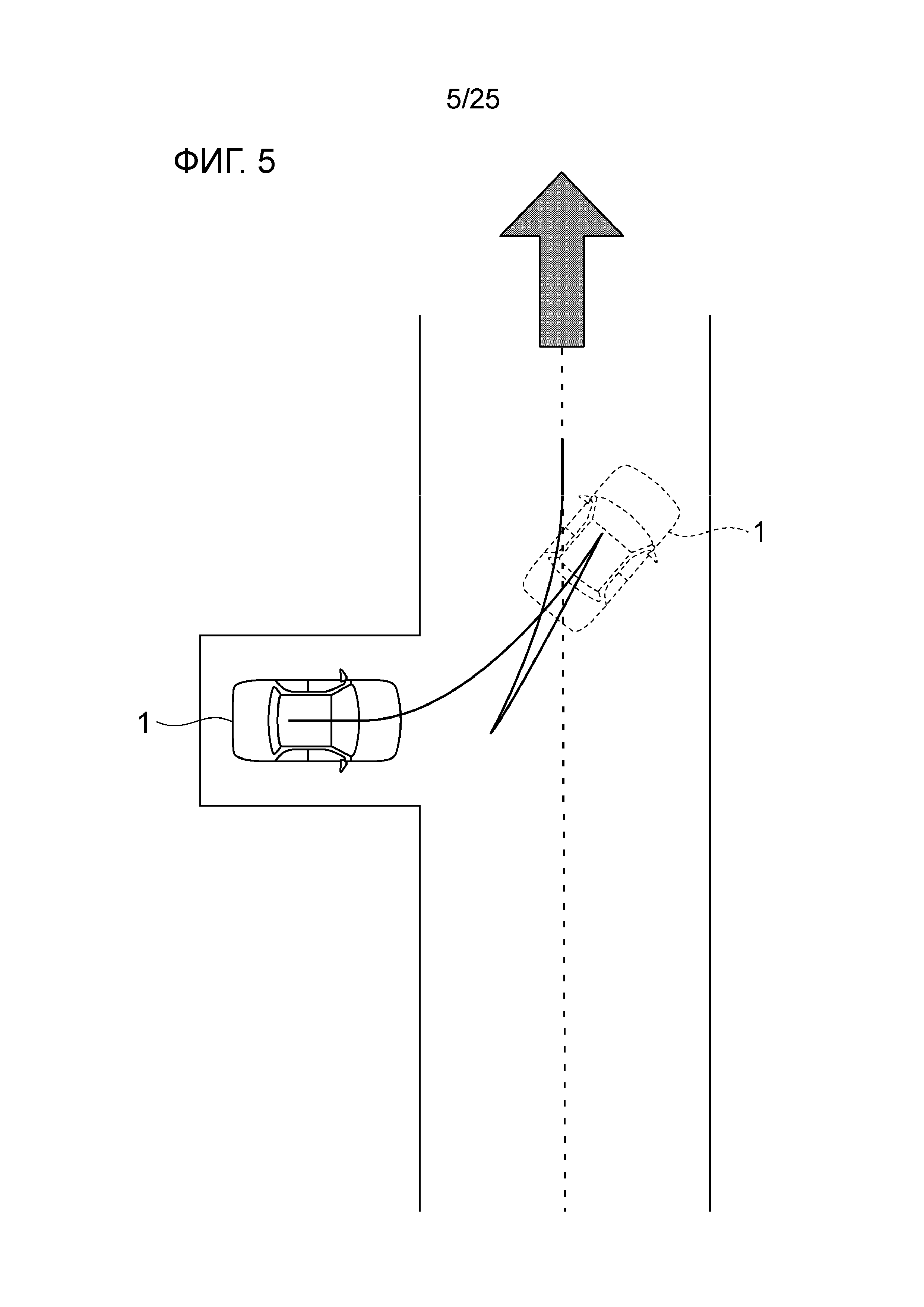
Фиг. 5 является схемой для описания способа автоматического задания направления выезда рассматриваемого транспортного средства.
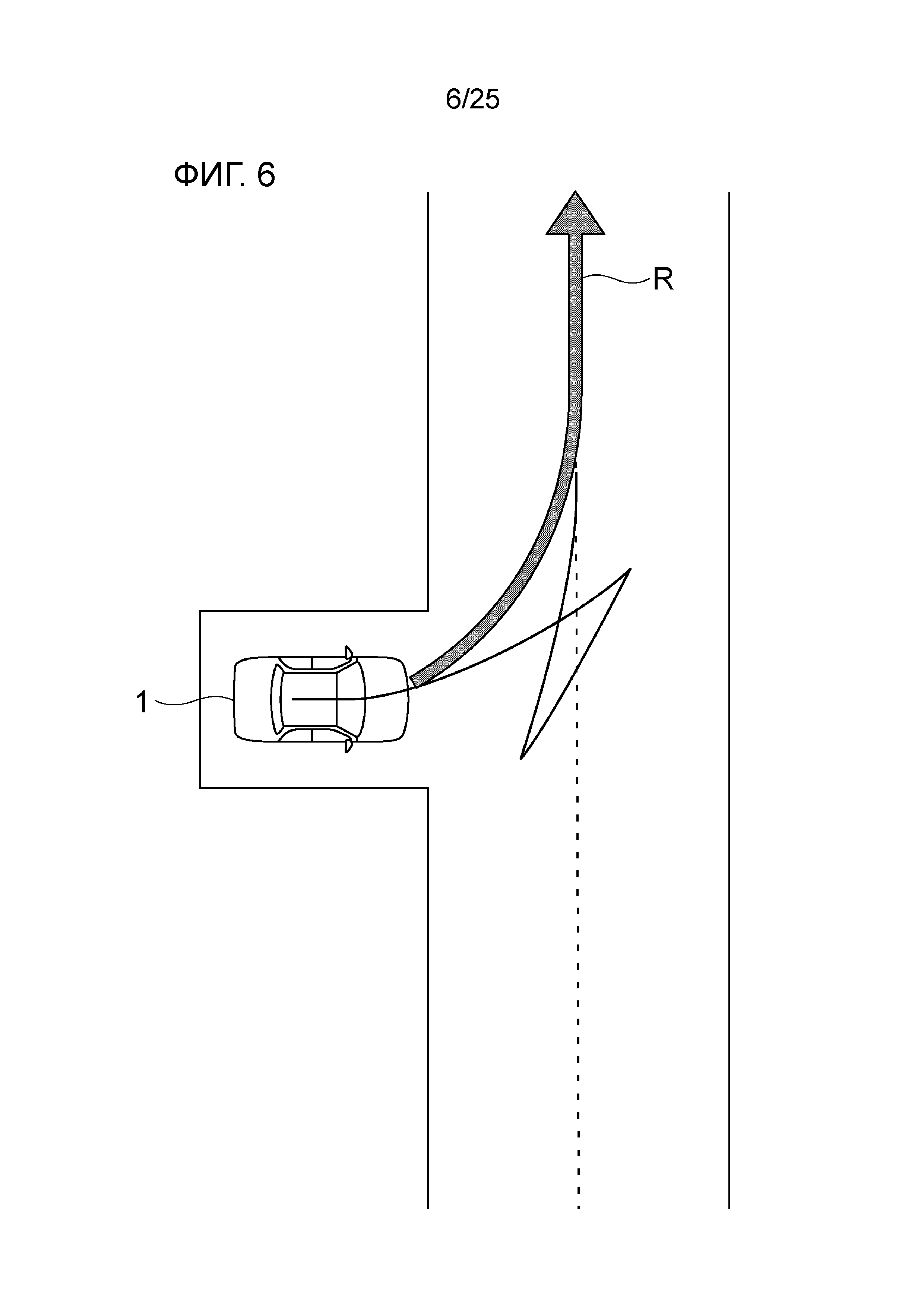
Фиг. 6 является схемой для описания способа автоматического задания направления выезда рассматриваемого транспортного средства.
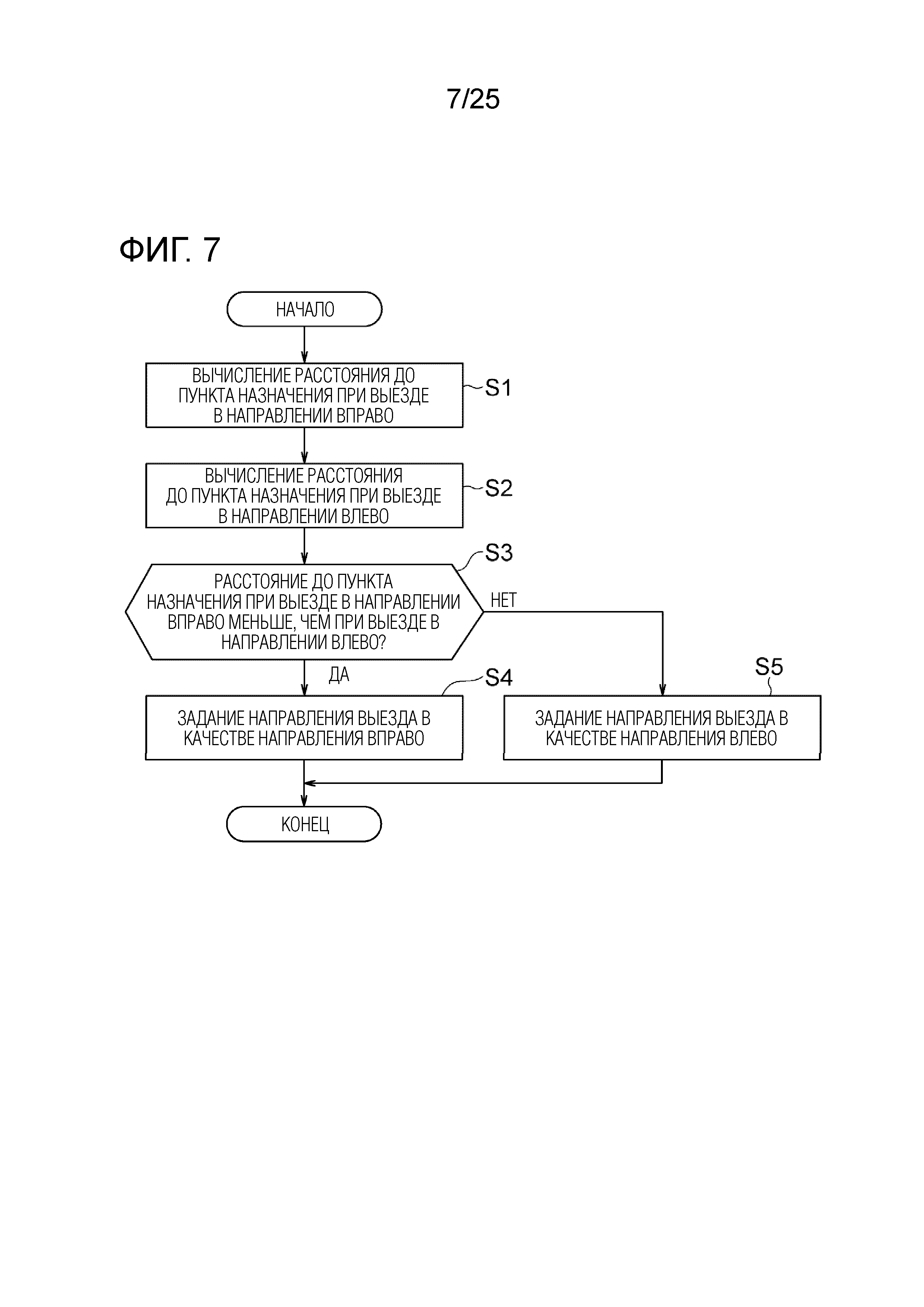
Фиг. 7 является блок-схемой, иллюстрирующей процедуру задания позиции выезда рассматриваемого транспортного средства в соответствии с расстоянием до пункта назначения.
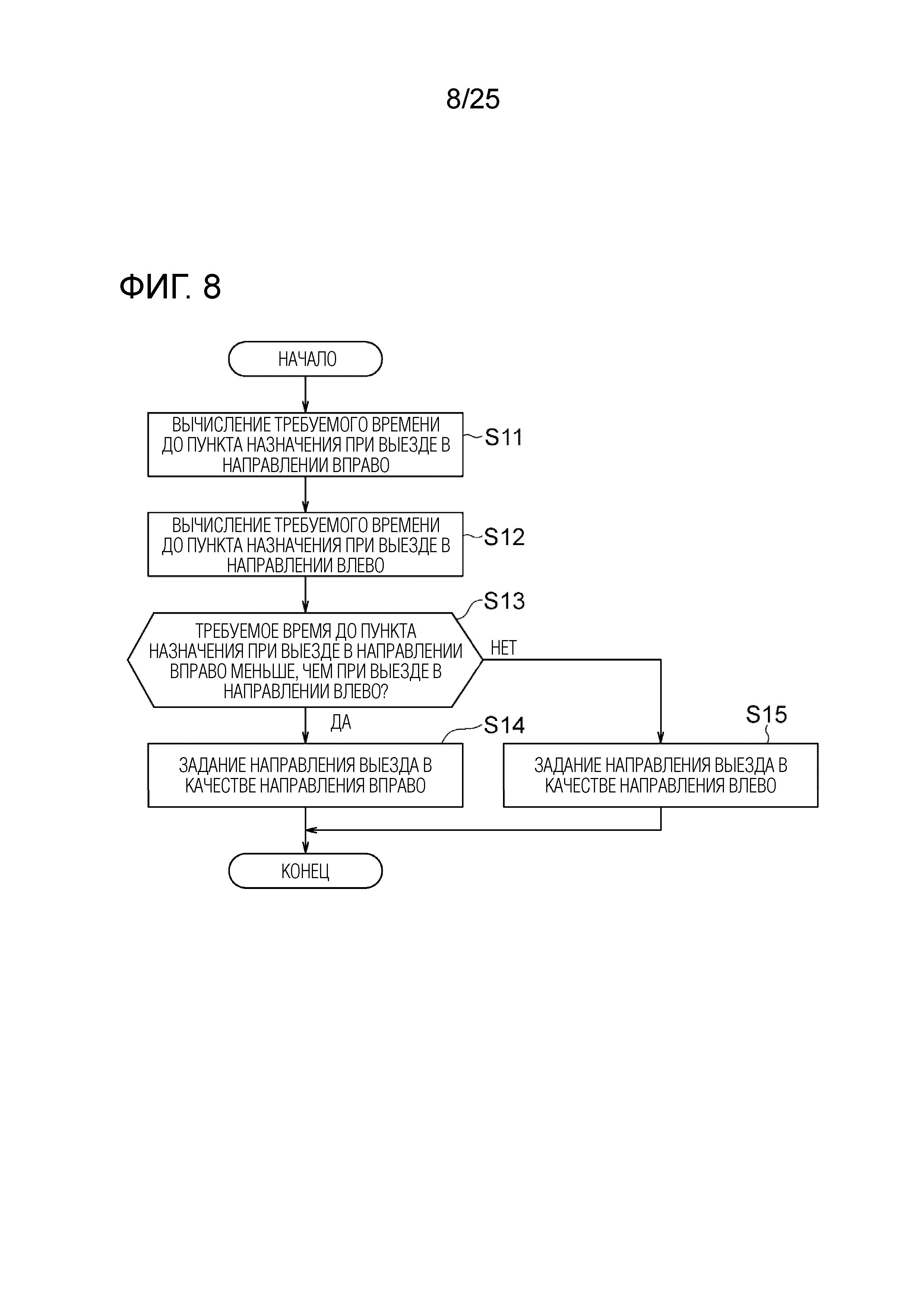
Фиг. 8 является блок-схемой, иллюстрирующей процедуру задания позиции выезда рассматриваемого транспортного средства в соответствии с требуемым временем до пункта назначения.
Фиг. 9 является набором видов для описания способа автоматического задания направления выезда рассматриваемого транспортного средства.
Фиг. 10 является схемой, иллюстрирующей удаленный контроллер, управляемый оператором.
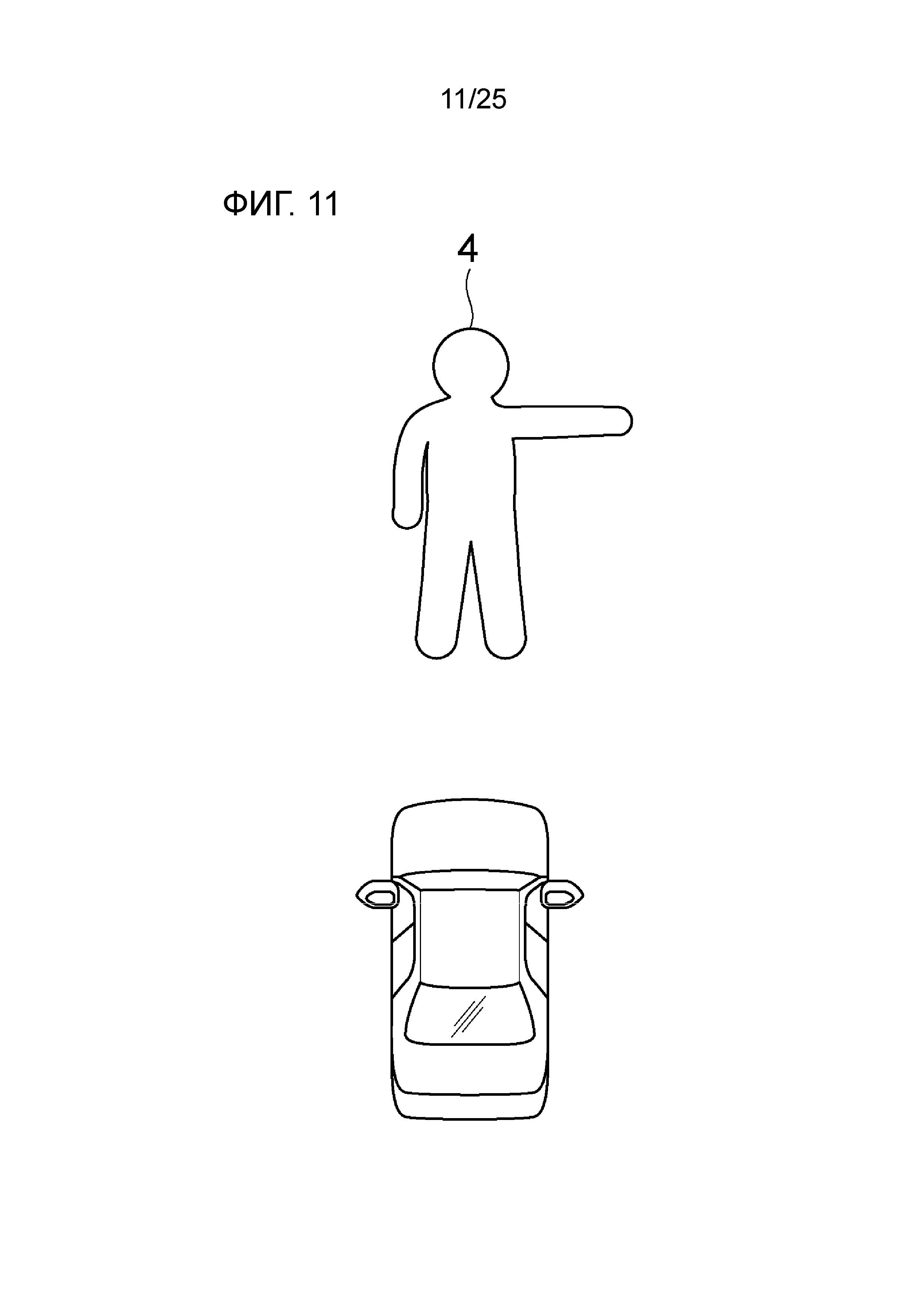
Фиг. 11 является схемой для описания способа ручного задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением.
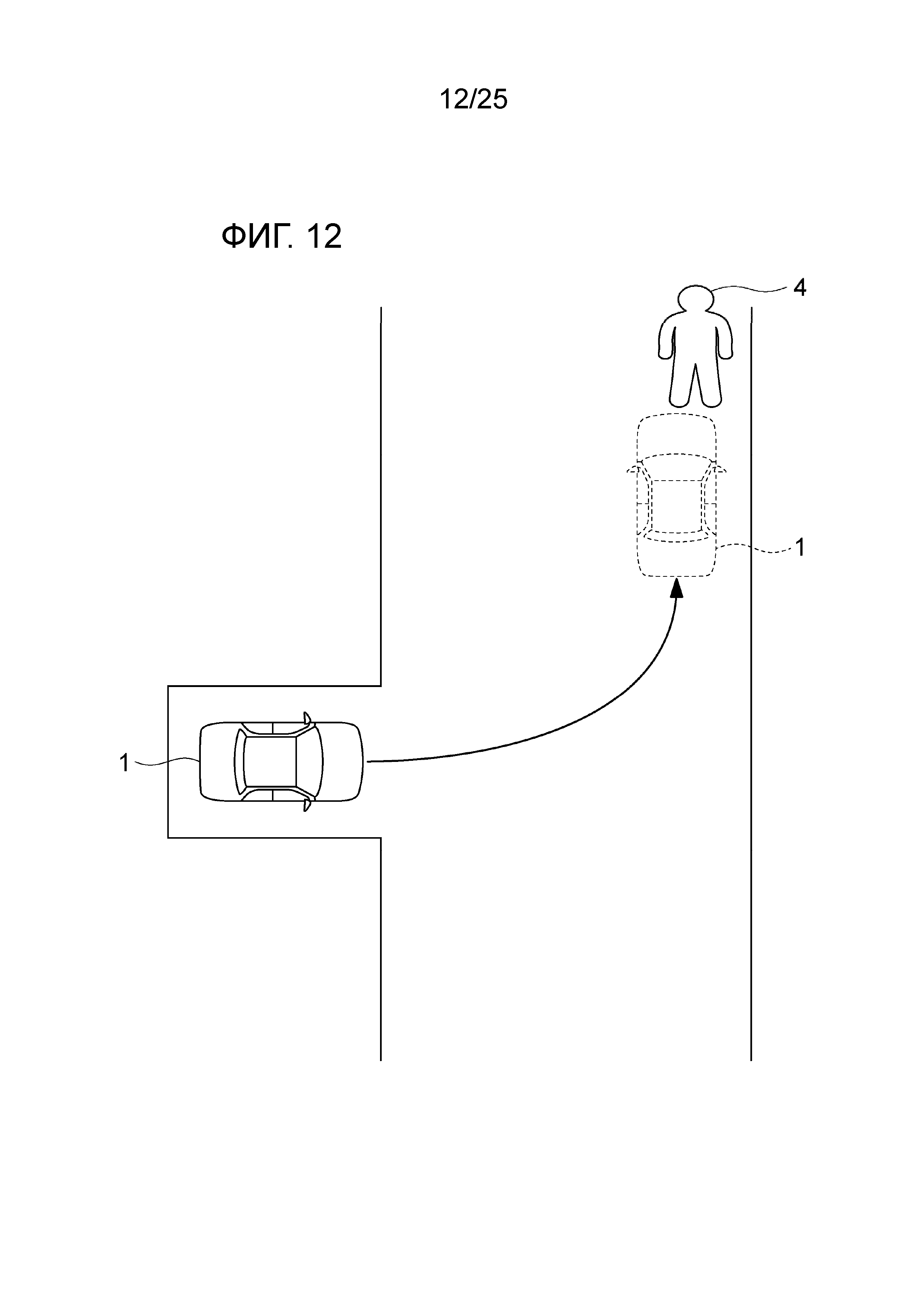
Фиг. 12 является схемой для описания способа автоматического задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением.
Фиг. 13 является схемой для описания способа автоматического задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением.
Фиг. 14 является схемой для описания способа автоматического задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением.
Фиг. 15 является схемой для описания способа автоматического задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением.
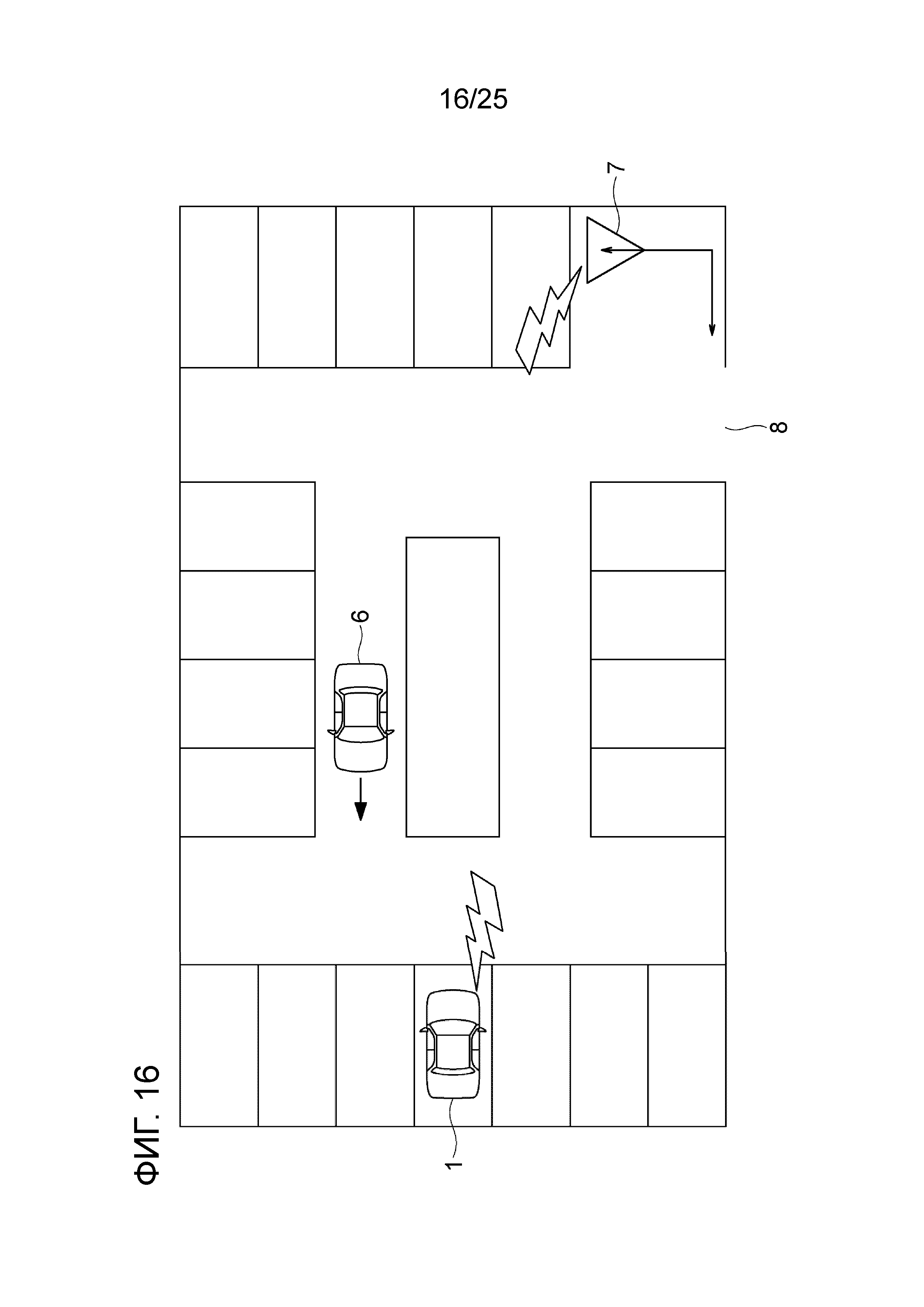
Фиг. 16 является схемой для описания способа автоматического задания позиции выезда рассматриваемого транспортного средства, управляемого на выезд под удаленным управлением на «безлюдной» автомобильной парковке.
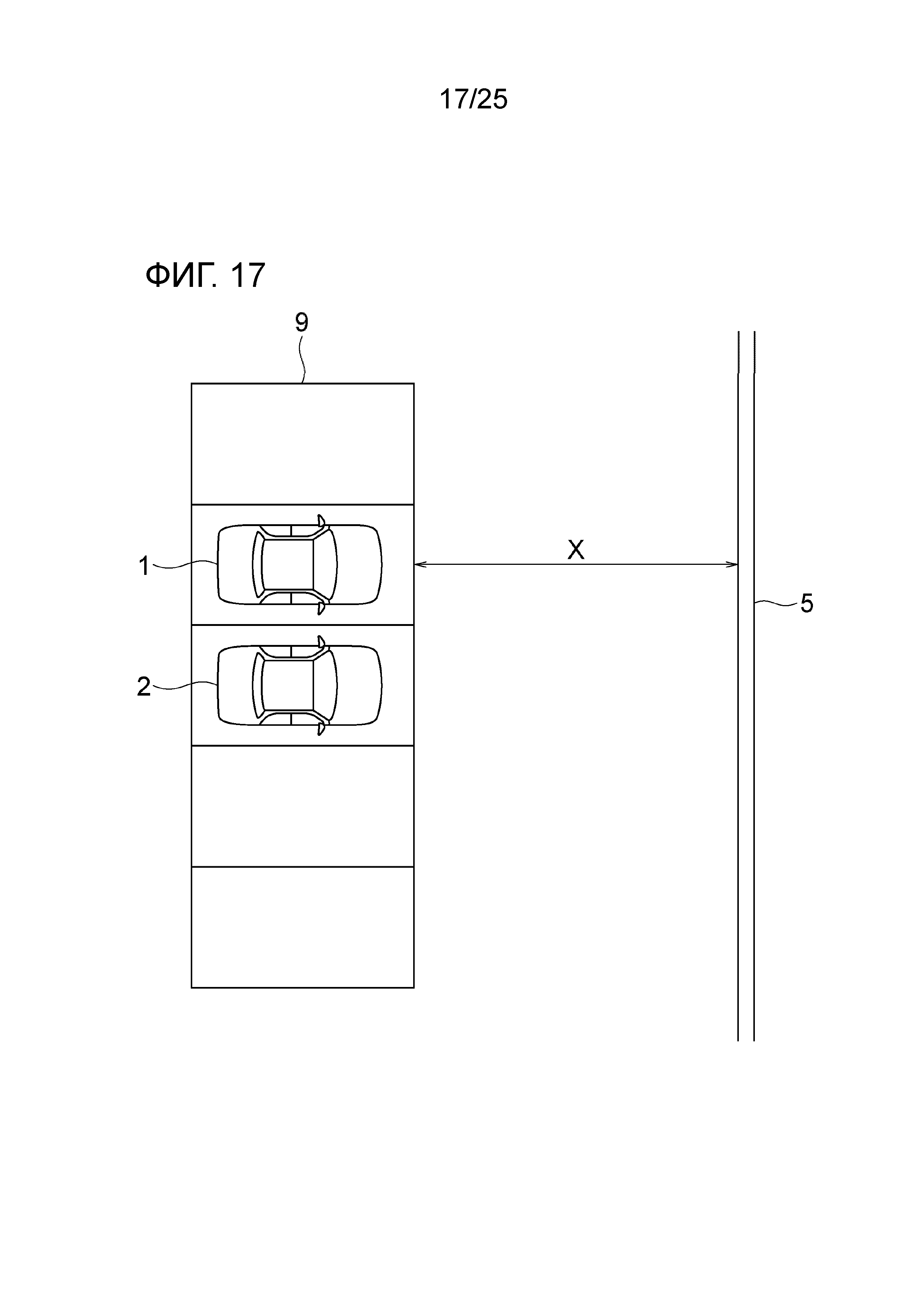
Фиг. 17 является схемой для описания способа оценки ширины X проезда для выезда.
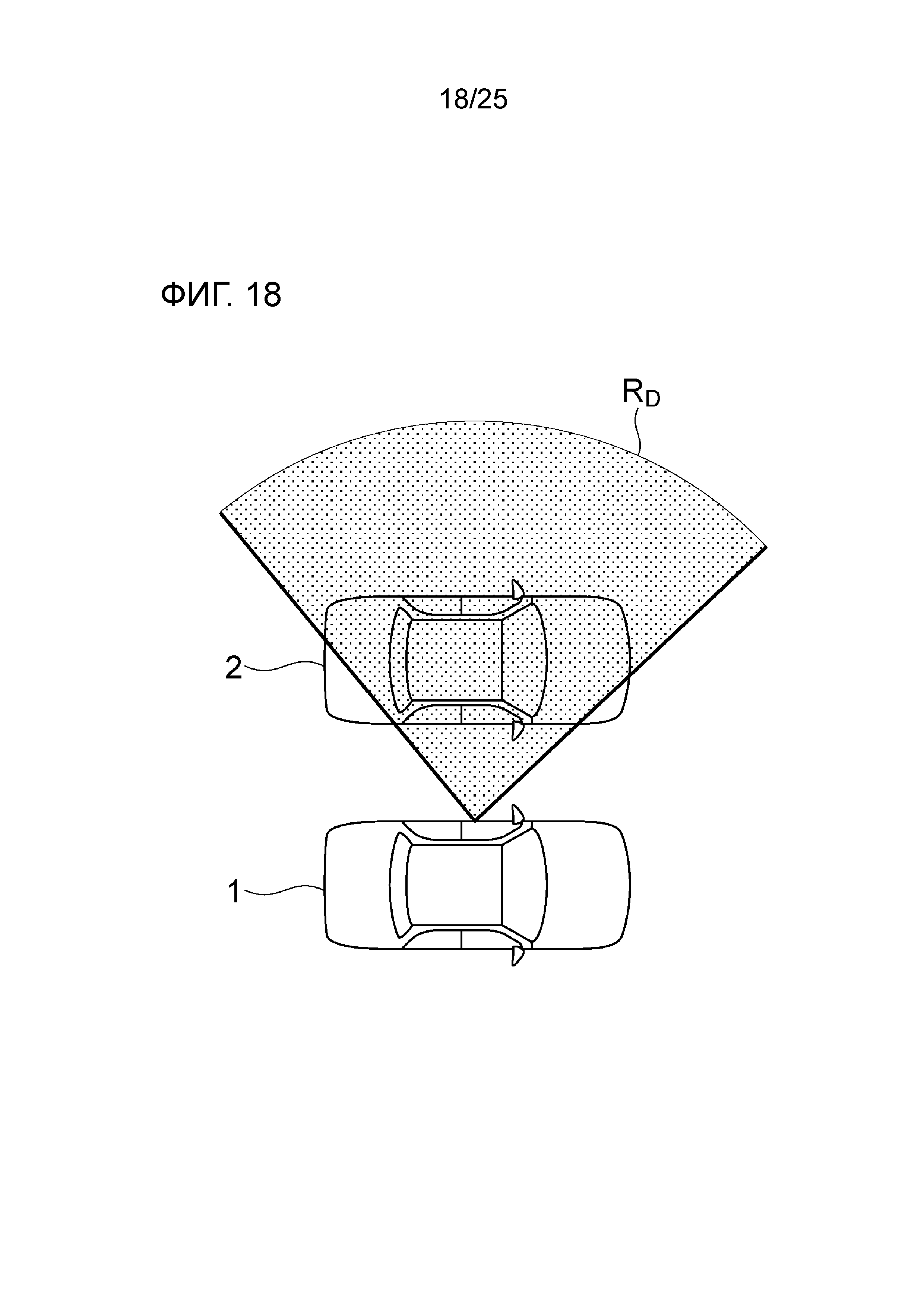
Фиг. 18 является схемой для описания способа обнаружения припаркованного транспортного средства, смежного с рассматриваемым транспортным средством.
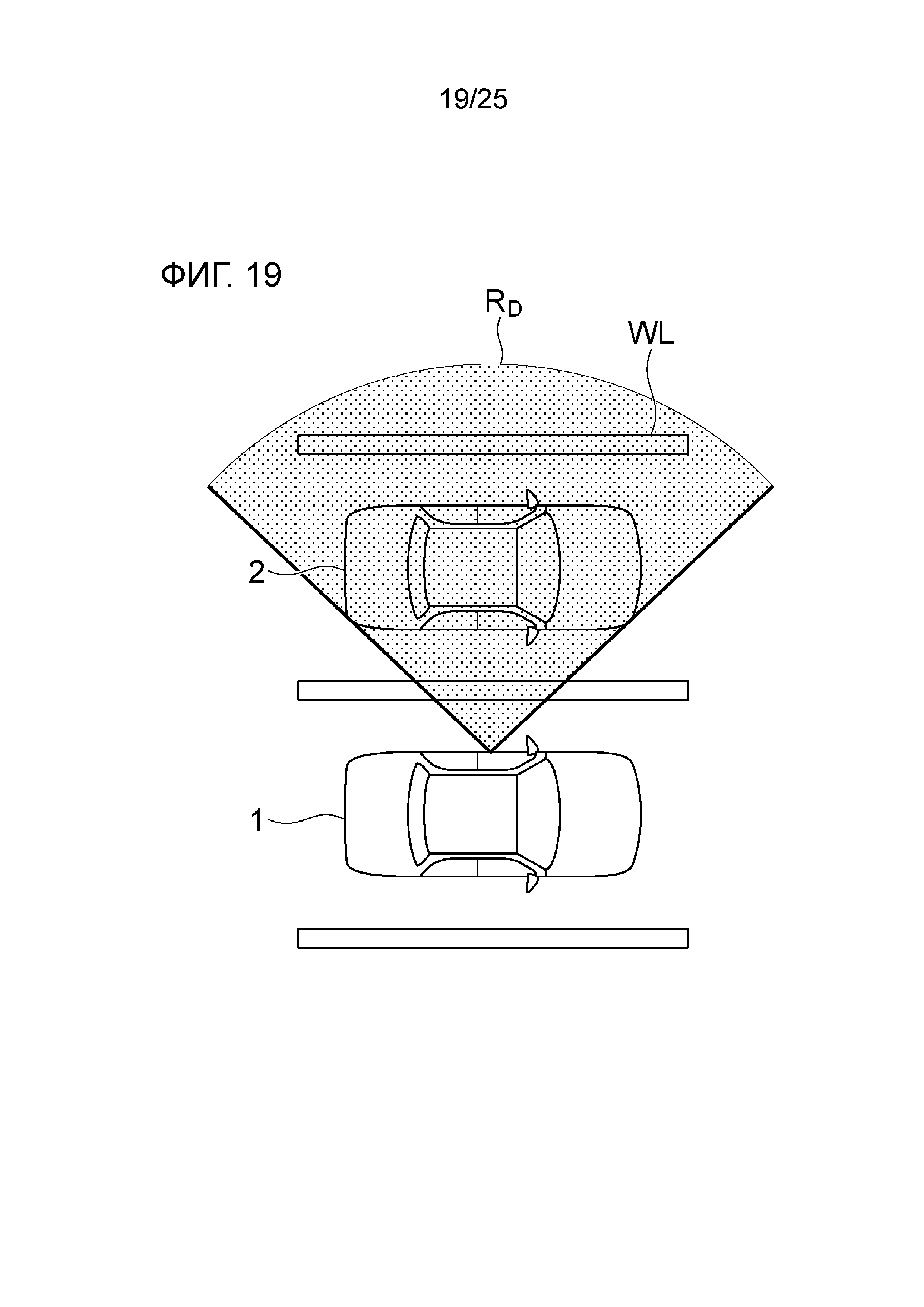
Фиг. 19 является схемой для описания способа обнаружения припаркованного транспортного средства, смежного с рассматриваемым транспортным средством.
Фиг. 20 является схемой для описания процесса формирования пути выезда рассматриваемого транспортного средства, выезжающего передним ходом.
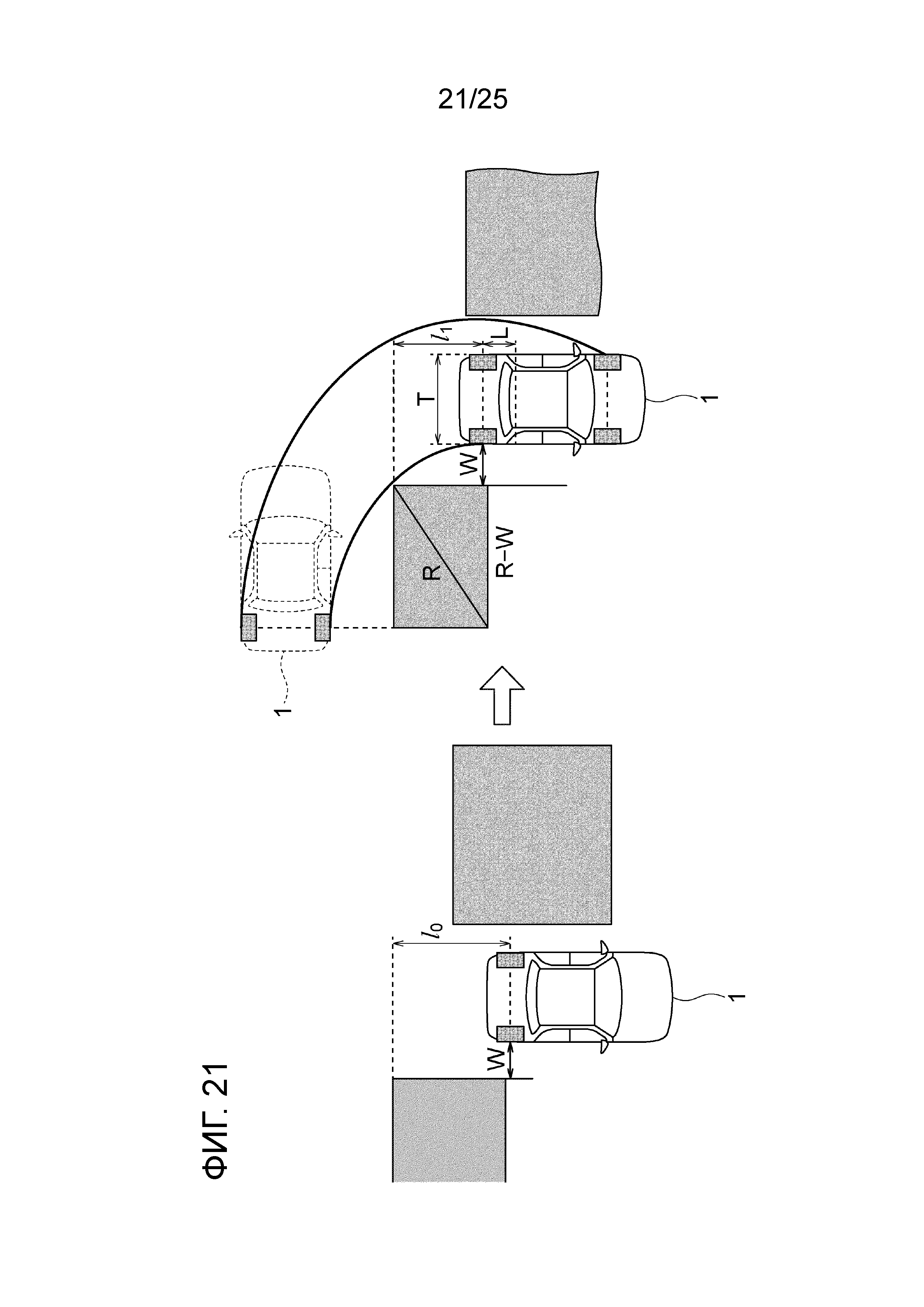
Фиг. 21 является схемой для описания процесса формирования пути выезда рассматриваемого транспортного средства, выезжающего задним ходом.
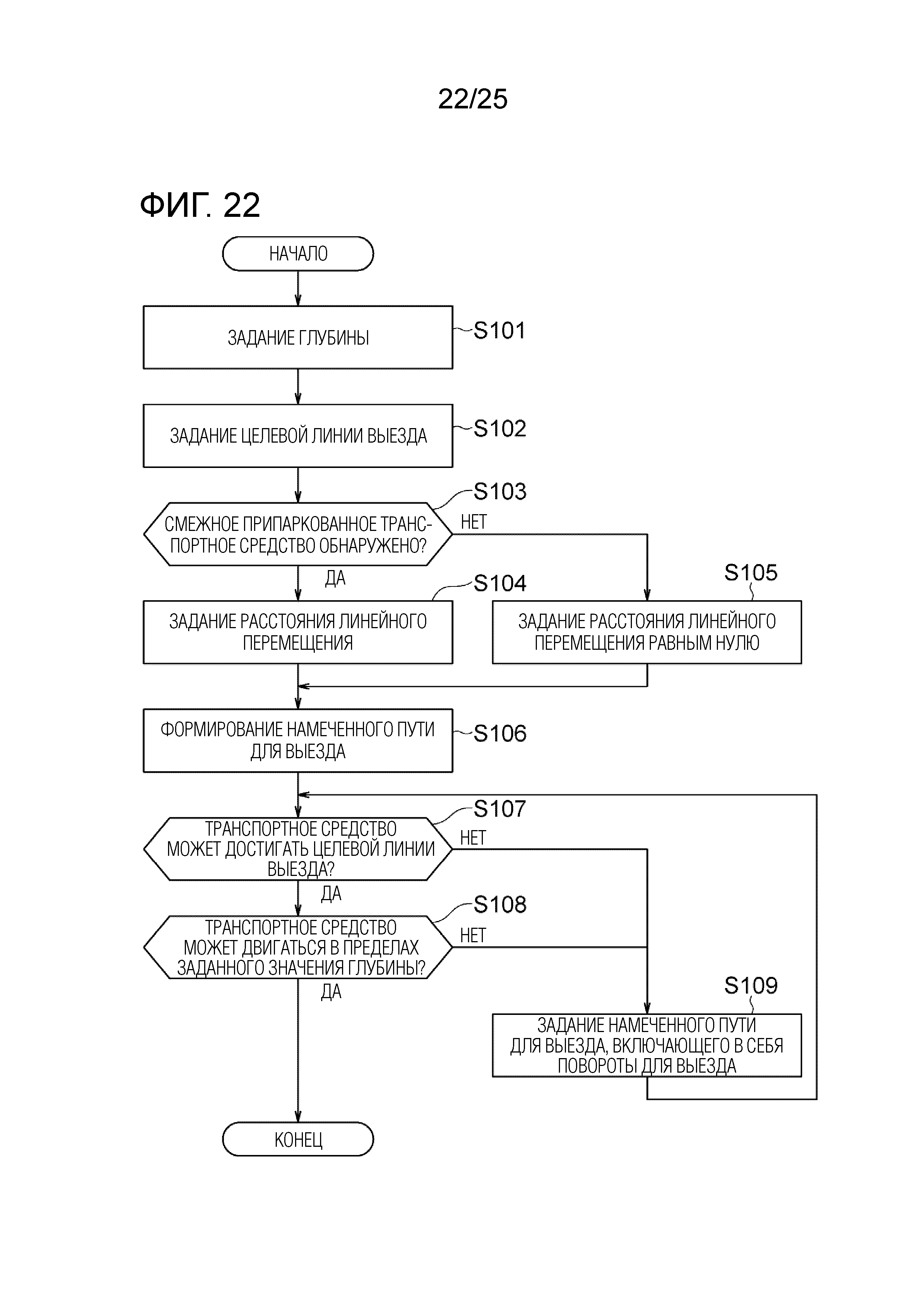
Фиг. 22 является блок-схемой, иллюстрирующей процедуру процесса формирования пути выезда.
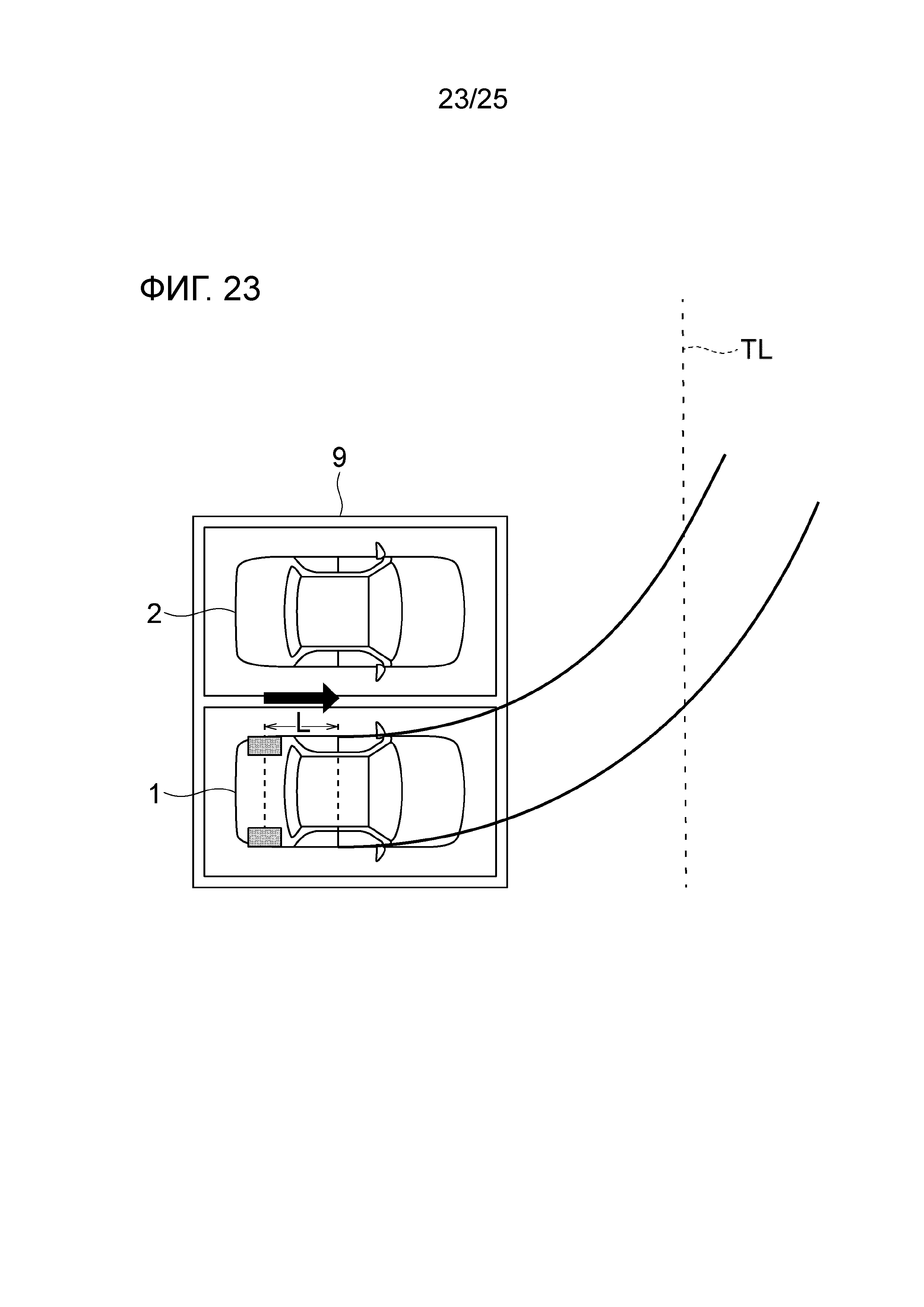
Фиг. 23 является схемой для описания процесса формирования пути выезда.
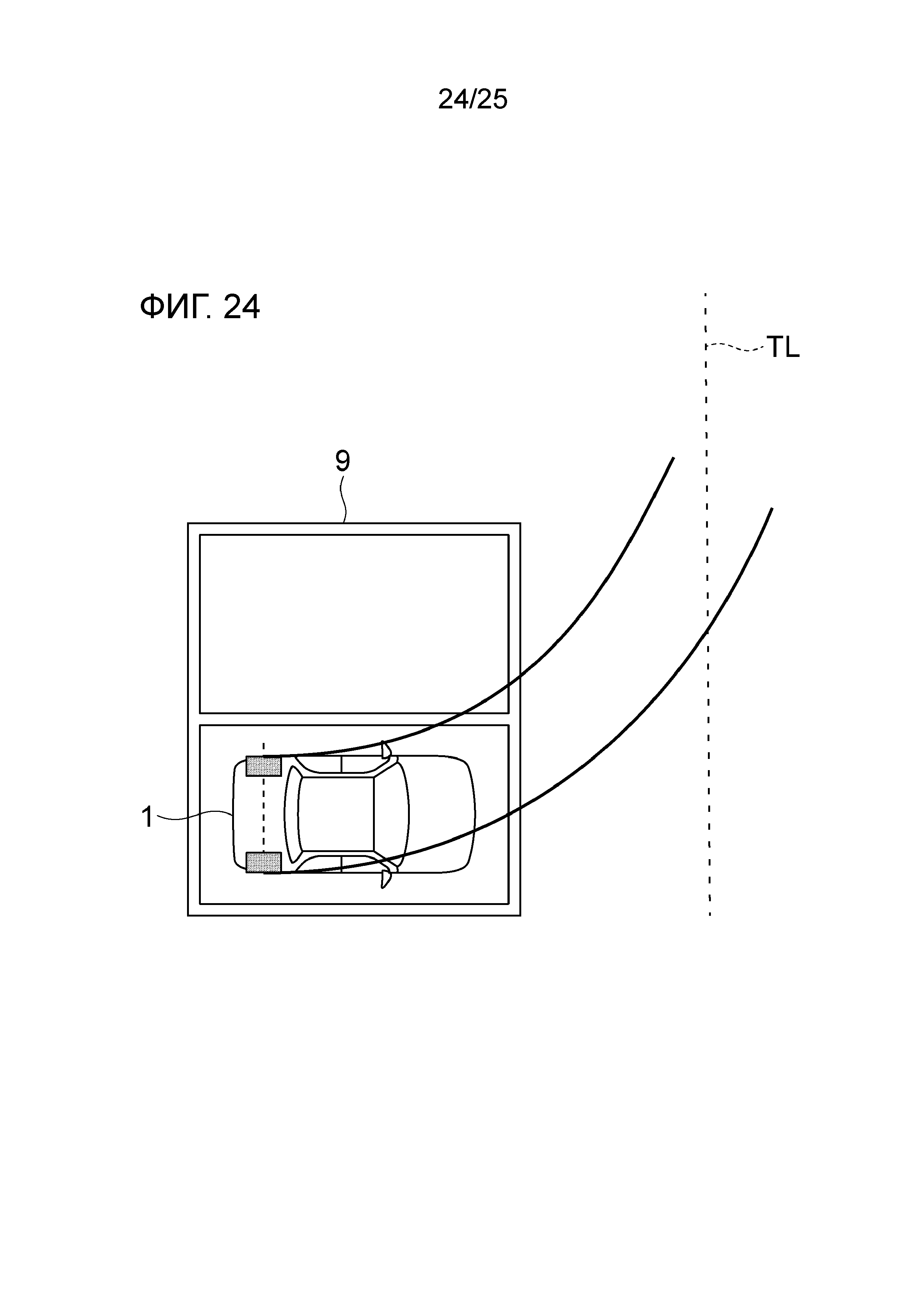
Фиг. 24 является схемой для описания процесса формирования пути выезда.
Фиг. 25 является блок-схемой, иллюстрирующей процедуру процесса формирования пути выезда согласно другому варианту осуществления.
Варианты осуществления изобретения
[0009] В дальнейшем будут описаны один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения. Устройство 100 помощи при парковке и выезде предусмотрено в качестве оборудования в транспортном средстве и помогает при операции парковки для перемещения (парковки) транспортного средства на парковочном месте и при операции выезда для перемещения транспортного средства из парковочного места. Устройство 100 помощи при парковке и выезде может реализовывать операцию парковки или операции выезда транспортного средства под удаленным управлением. Например, водитель или пассажир транспортного средства может вводить команду начать помощь при парковке или выезде в устройство удаленного управления, такое как удаленный контроллер или мобильный терминал, за пределами транспортного средства, чтобы за счет этого добиться операции парковки или выезда транспортного средства.
[0010] Устройство 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения содержит набор 10 камер, дальномерное устройство 15, датчик 20 расстояния перемещения, датчик 30 угла поворота при рулении, главный переключатель 40, электронный блок управления (ЭБУ) 50 помощи при парковке и выезде, ЭБУ 60 управления транспортным средством и навигационную систему 70. Устройство 100 помощи при парковке и выезде дополнительно содержит аппаратные модули (не проиллюстрированы), такие как ЭБУ управления двигателем и ЭБУ управления усилителем руля, которыми обычно оснащаются транспортные средства. Эти компоненты соединены друг с другом через контроллерную сеть (CAN) или другую бортовую локальную сеть (LAN), чтобы обмениваться друг с другом информацией.
[0011] Набор 10 камер содержит камеру 11 переднего вида, правую боковую камеру 12, левую боковую камеру 13 и камеру 14 заднего вида, например, как проиллюстрировано на фигуре. Камера 11 переднего вида, которая устанавливается на переднем бампере транспортного средства либо в его окрестности, захватывает изображения впереди рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Правая боковая камера 12, которая устанавливается на правой стороне транспортного средства (например, в правосторонней части передней части транспортного средства), захватывает изображения с правой стороны от рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Левая боковая камера 13, которая устанавливается на левой стороне транспортного средства (например, в левосторонней части переда транспортного средства), захватывает изображения с левой стороны от рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Камера 14 заднего вида, которая устанавливается на заднем бампере транспортного средства либо в его окрестности, захватывает изображения позади рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде.
[0012] Дальномерное устройство 15 представляет собой радарный прибор или сонар, такой как радар миллиметрового диапазона, лазерный радар или ультразвуковой радар. Это дальномерное устройство 15 устанавливается в том же положении, что и любая из камер 11-14, и обнаруживает присутствие или отсутствие объектов, таких как помехи (препятствия), пешеходы и другие транспортные средства около транспортного средства, позиции объектов и расстояния до объектов.
[0013] Датчик 20 расстояния перемещения вычисляет величину перемещения рассматриваемого транспортного средства и выводит ее в ЭБУ 50 помощи при парковке и выезде. Датчик 20 расстояния перемещения может быть выполнен, например, с использованием датчика скорости вращения и т.п., который определяет скорость вращения колеса рассматриваемого транспортного средства.
[0014] Датчик 30 угла поворота при рулении, который установлен в рулевой колонке, например, определяет угол поворота руля и выводит его в ЭБУ 50 помощи при парковке и выезде.
[0015] Главный переключатель 40 представляет собой переключатель, который задействуется пользователем, чтобы дать команду на начало помощи при парковке и помощи при выезде. Когда главный переключатель 40 не задействован, он выводит сигнал «выкл» в ЭБУ 50 помощи при парковке и выезде, а когда главный переключатель 40 задействован, он выводит сигнал «вкл» в ЭБУ 50 помощи при парковке и выезде. Главный переключатель 40 устанавливается, например, в каком-то местоположении на устройстве удаленного управления, таком как удаленный контроллер или мобильный терминал, который носится тем водителем или пассажиром, который выполняет удаленное управление за пределами транспортного средства, в местоположении, в котором водитель может задействовать главный переключатель 40 в транспортном средстве, к примеру, в местоположении около приборной панели рассматриваемого транспортного средства или около руля либо в другом соответствующем местоположении. Главный переключатель 40 может представлять собой программный переключатель, предусмотренный на экране мобильного терминала, такого как смартфон, способный на обмен данными с транспортным средством по сети, программный переключатель, предусмотренный на экране навигационного устройства, либо другой подходящий переключатель.
[0016] ЭБУ 50 помощи при парковке и выезде представляет собой контроллер, который всесторонне управляет устройством 100 помощи при парковке и выезде. ЭБУ 50 помощи при парковке и выезде содержит постоянное запоминающее устройство (ПЗУ) 52, которое хранит программу помощи при парковке и выезде, центральный процессор (ЦП) 51 в качестве операционной цепи, которая исполняет сохраненную в ПЗУ 52 программу, чтобы служить в качестве устройства 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения, и оперативное запоминающее устройство (ОЗУ) 53, которое служит в качестве доступного устройства хранения данных. ЭБУ 50 помощи при парковке и выезде, в который вводится информация об обнаружении или команды из набора 10 камер, дальномерного устройства 15, датчика 20 расстояния перемещения, датчика 30 угла поворота при рулении и главного переключателя 40, вычисляет целевой угол поворота при рулении и целевую скорость рассматриваемого транспортного средства и выводит их в ЭБУ 60 управления транспортным средством.
[0017] ЭБУ 60 управления транспортным средством представляет собой контроллер, который выполняет управление движением транспортного средства. ЭБУ 60 управления транспортным средством содержит ПЗУ 62, которое хранит программу управления движением транспортного средства, ЦП 61 в качестве операционной цепи, которая исполняет сохраненную в ПЗУ 62 программу, чтобы служить в качестве устройства управления транспортным средством, и ОЗУ 63, которое служит в качестве доступного устройства хранения данных. ЭБУ 60 управления транспортным средством, в который вводятся целевой угол поворота при рулении и целевая скорость транспортного средства из ЭБУ 50 помощи при парковке и выезде, выполняет управление движением транспортного средства во взаимодействии с другими ЭБУ, такими как ЭБУ управления двигателем и ЭБУ управления усилителем руля.
[0018] Фиг. 2 является блок-схемой для описания функции помощи при выезде ЭБУ 50 помощи при парковке и выезде. Как проиллюстрировано на этой фигуре, ЭБУ 50 помощи при парковке и выезде содержит модуль 501 задания позиций выезда, модуль 502 задания начальных позиций выезда, модуль 503 оценки ширины проезда, модуль 504 обнаружения окружающих объектов, модуль 505 формирования путей выезда, модуль 506 управления следованием по пути выезда и модуль 507 формирования целевой скорости. ЭБУ 60 управления транспортным средством включает в себя модуль 601 управления углом поворота при рулении и модуль 602 управления скоростью. Навигационная система 70 включает в себя модуль 701 оценки текущей позиции. Модуль 701 оценки текущей позиции оценивает текущую позицию рассматриваемого транспортного средства и выводит ее в модуль 502 задания начальных позиций выезда и модуль 506 управления следованием по пути выезда. Примеры процесса оценки текущей позиции включают в себя процесс измерения текущей позиции рассматриваемого транспортного средства с использованием глобальной системы позиционирования (GPS), процесс получения текущей позиции посредством связи между транспортным средством и дорожной инфраструктурой, процесс вычисления текущей позиции на основе величины руления при рулении и рабочей величины нажатия педали акселератора и процесс накопления величины перемещения и позиции транспортного средства, чтобы вычислить текущую позицию.
[0019] Модуль 501 задания позиций выезда задает позицию, в котором рассматриваемым транспортным средством управляют для выезда из позиции парковки посредством автоматизированного вождения (эта позиция в дальнейшем называется "целевой позицией выезда"). Здесь, в зависимости от ситуаций, таких как присутствие или отсутствие припаркованного транспортного средства, смежного с рассматриваемым транспортным средством, и взаимное относительное расположение припаркованного и рассматриваемого транспортных средств, возникают случаи, в которых направление выезда рассматриваемого транспортного средства ограничено или не ограничено. В случае, если направление выезда рассматриваемого транспортного средства ограничено смежным припаркованным транспортным средством, модуль 501 задания позиций выезда задает позицию выезда в соответствии с взаимным относительным расположением припаркованного и рассматриваемого транспортных средств и/или с тем, имеет ли проезд для выезда правостороннее или левостороннее движение. С другой стороны, в случае, если смежное припаркованное транспортное средство не присутствует, или направление выезда рассматриваемого транспортного средства не ограничено смежным припаркованным транспортным средством, модуль 501 задания позиций выезда задает позицию выезда с использованием различных способов, которые описываются ниже.
[0020] При этом позиция выезда, которую задает модуль 501 задания позиций выезда, когда направление выезда рассматриваемого транспортного средства ограничено смежным припаркованным транспортным средством, может быть позицией выезда, которую нельзя изменять посредством выбора водителем или пассажиром, т.е. позицией выезда, которая ограничивается, либо позицией выезда, которую можно изменять посредством выбора водителем или пассажиром, т.е. позицией выезда, которая задается первоначально или рекомендуется.
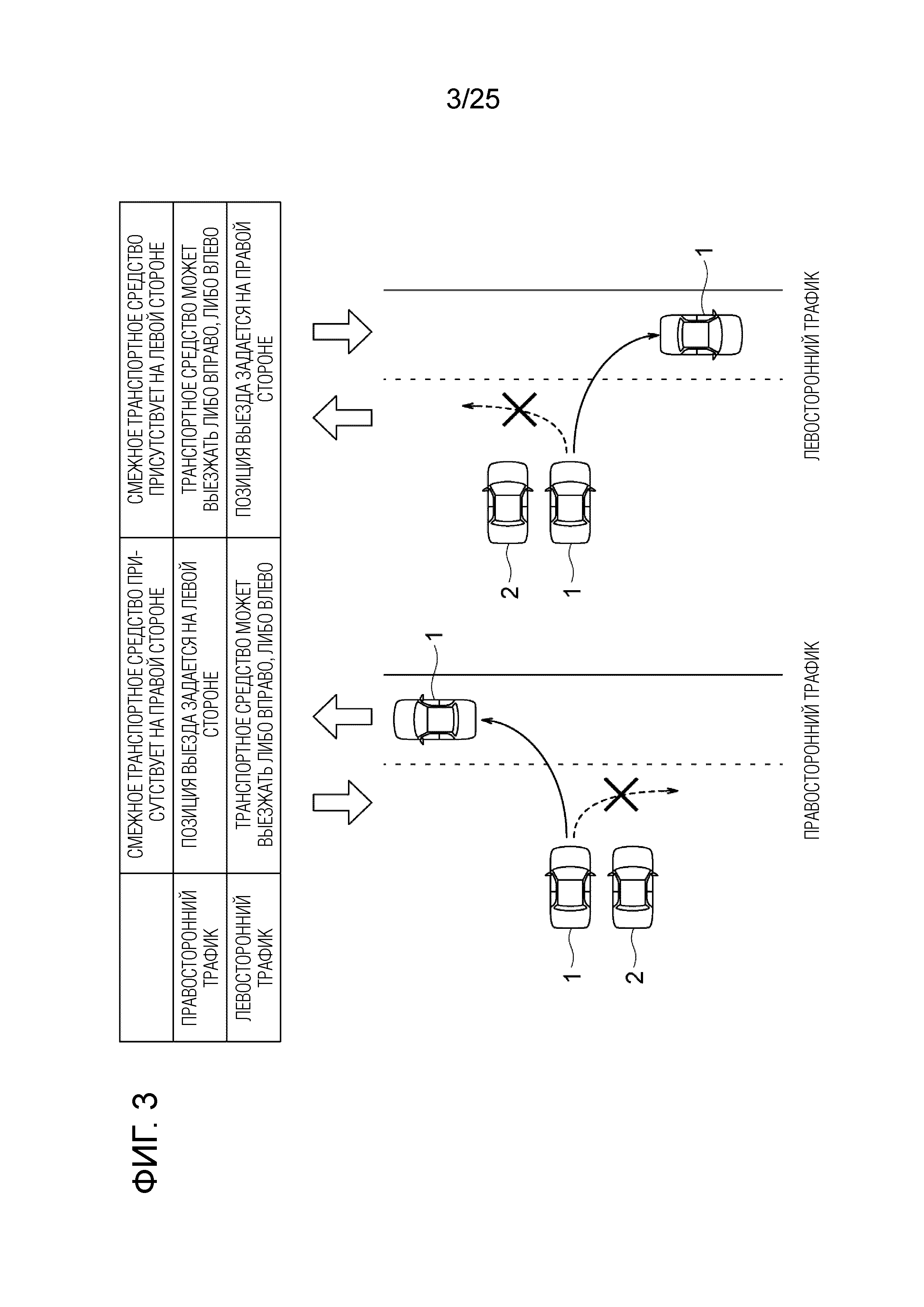
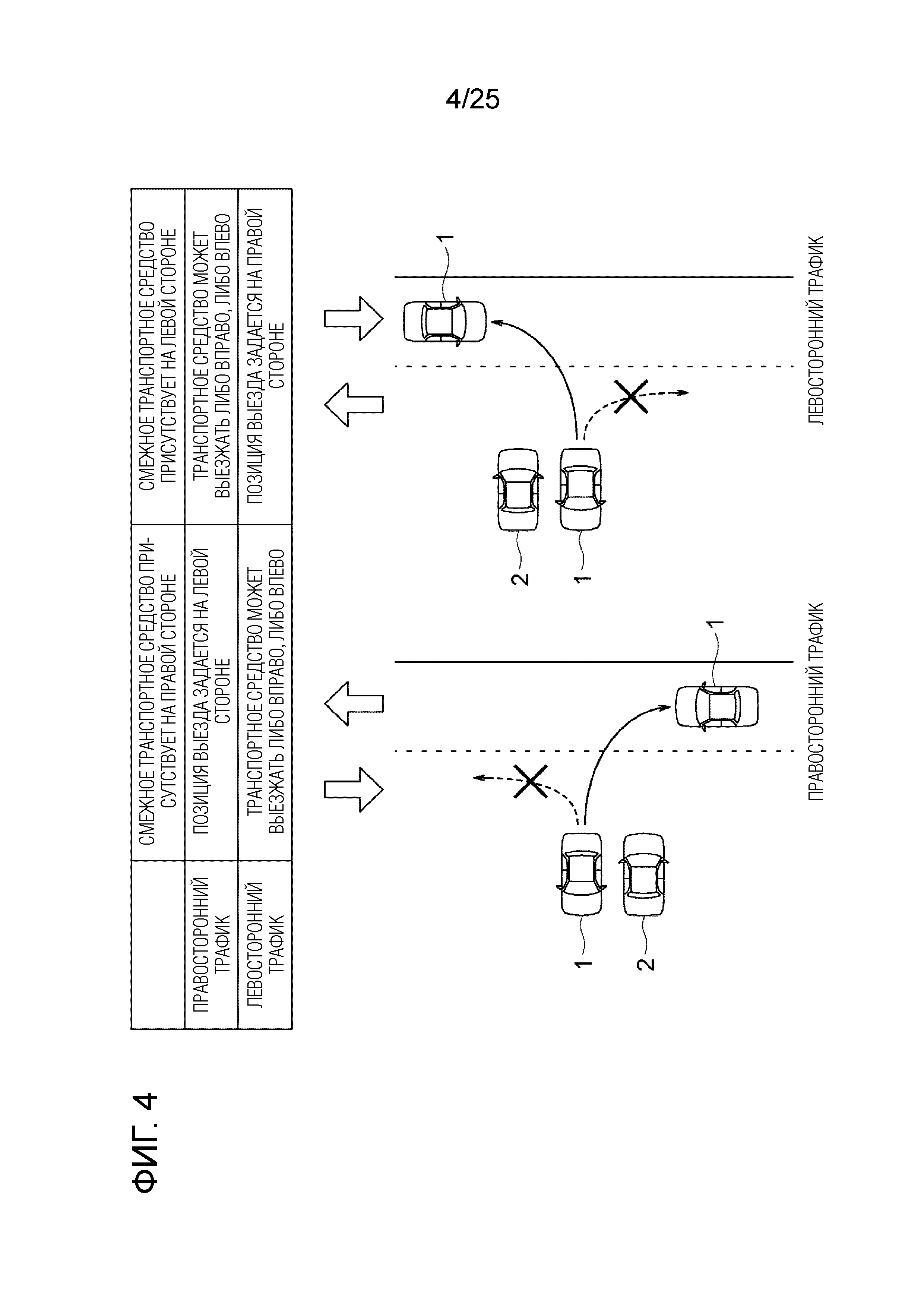
[0021] Фиг. 3 и 4 являются схемами и таблицами для описания способов задания позиции выезда рассматриваемого транспортного средства 1. Фиг. 3 иллюстрирует таблицу и схемы для описания способа задания позиции выезда в случае, если рассматриваемое транспортное средство 1 выезжает передним ходом. Фиг. 4 иллюстрирует таблицу и схемы для описания способа задания позиции выезда в случае, если рассматриваемое транспортное средство 1 выезжает задним ходом.
[0022] Как проиллюстрировано на левой схеме по фиг. 3, когда смежное припаркованное транспортное средство 2 присутствует с правой стороны от рассматриваемого транспортного средства 1, которое выезжает передним ходом, и проезд для выезда имеет правостороннее движение, рассматриваемому транспортному средству 1 проще выезжать в левую сторону, чем в правую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда задается в правосторонней полосе движения налево, если смотреть из рассматриваемого транспортного средства 1. Напротив, когда смежное припаркованное транспортное средство 2 присутствует с правой стороны от рассматриваемого транспортного средства 1, которое выезжает передним ходом, и проезд для выезда имеет левостороннее движение, нет существенного различия в простоте между тем, когда рассматриваемое транспортное средство 1 выезжает в левую сторону, если смотреть из рассматриваемого транспортного средства 1, и тем, когда рассматриваемое транспортное средство 1 выезжает в правую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда рассматриваемого транспортного средства 1 не ограничивается. Простота выезда рассматриваемого транспортного средства 1 определяется на основе того, является ли расстояние описываемого ниже участка линейного перемещения большим или малым, является ли радиус поворота большим или малым, и/или является ли число поворотов для выезда большим или малым.
[0023] С другой стороны, как проиллюстрировано на правой схеме по фиг. 3, когда смежное припаркованное транспортное средство 2 присутствует с левой стороны от рассматриваемого транспортного средства 1, которое выезжает передним ходом, и проезд для выезда имеет левостороннее движение, рассматриваемому транспортному средству 1 проще выезжать в правую сторону, чем в левую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда задается в левосторонней полосе движения направо, если смотреть из рассматриваемого транспортного средства 1. Напротив, когда смежное припаркованное транспортное средство 2 присутствует с левой стороны от рассматриваемого транспортного средства 1, которое выезжает передним ходом, и проезд для выезда имеет правостороннее движение, нет существенного различия в простоте между тем, когда рассматриваемое транспортное средство 1 выезжает в левую сторону, если смотреть из рассматриваемого транспортного средства 1, и тем, когда рассматриваемое транспортное средство 1 выезжает в правую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда рассматриваемого транспортного средства 1 не ограничивается.
[0024] Как проиллюстрировано на левой схеме по фиг. 4, когда смежное припаркованное транспортное средство 2 присутствует с правой стороны от рассматриваемого транспортного средства 1, которое выезжает задним ходом (т.е. с левой стороны, если смотреть от водителя), и проезд для выезда имеет правостороннее движение, рассматриваемому транспортному средству 1 проще выезжать в правую сторону, если смотреть из рассматриваемого транспортного средства 1 (т.е. в сторону влево назад, если смотреть от водителя), чем в левую сторону, если смотреть из рассматриваемого транспортного средства 1 (т.е. в сторону вправо назад, если смотреть от водителя); поэтому позиция выезда задается в правосторонней полосе движения направо, если смотреть из рассматриваемого транспортного средства 1 (т.е. налево назад, если смотреть от водителя). Напротив, когда смежное припаркованное транспортное средство 2 присутствует с правой стороны от рассматриваемого транспортного средства 1, которое выезжает задним ходом, и проезд для выезда имеет левостороннее движение, нет существенного различия в простоте между тем, когда рассматриваемое транспортное средство 1 выезжает в левую сторону, если смотреть из рассматриваемого транспортного средства 1, и тем, когда рассматриваемое транспортное средство 1 выезжает в правую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда рассматриваемого транспортного средства 1 не ограничивается. При выезде задним ходом выполняется поворот с привязкой к оси передних колес. Как проиллюстрировано сплошной стрелкой на левой схеме по фиг. 4, при выезде в правую сторону, если смотреть из рассматриваемого транспортного средства, просвет между левым передним колесом и смежным припаркованным транспортным средством 2 при повороте является большим. Напротив, как проиллюстрировано пунктирной стрелкой на левой схеме по фиг. 4, при выезде в левую сторону, если смотреть из рассматриваемого транспортного средства, просвет между левым передним колесом и смежным припаркованным транспортным средством 2 при повороте является относительно малым. Поэтому в ситуации, проиллюстрированной на левой схеме по фиг. 4, рассматриваемому транспортному средству 1 проще выезжать в правую сторону, чем в левую сторону, если смотреть из рассматриваемого транспортного средства 1.
[0025] С другой стороны, когда смежное припаркованное транспортное средство 2 присутствует с левой стороны от рассматриваемого транспортного средства 1, которое выезжает передним ходом (т.е. с правой стороны, если смотреть от водителя), и проезд для выезда имеет левостороннее движение, рассматриваемому транспортному средству 1 проще выезжать в левую сторону, если смотреть из рассматриваемого транспортного средства 1 (т.е. в сторону вправо назад, если смотреть от водителя), чем в правую сторону, если смотреть из рассматриваемого транспортного средства 1 (т.е. в сторону влево назад, если смотреть от водителя); поэтому позиция выезда задается в левосторонней полосе движения налево, если смотреть из рассматриваемого транспортного средства 1 (т.е. в сторону вправо назад, если смотреть от водителя). Напротив, когда смежное припаркованное транспортное средство 2 присутствует с левой стороны от рассматриваемого транспортного средства 1, которое выезжает задним ходом, и проезд для выезда имеет правостороннее движение, нет существенного различия в простоте между тем, когда рассматриваемое транспортное средство 1 выезжает в левую сторону, если смотреть из рассматриваемого транспортного средства 1, и тем, когда рассматриваемое транспортное средство 1 выезжает в правую сторону, если смотреть из рассматриваемого транспортного средства 1; поэтому позиция выезда рассматриваемого транспортного средства 1 не ограничивается.
[0026] При этом, когда позиция выезда рассматриваемого транспортного средства 1 не ограничивается вследствие присутствия смежного припаркованного транспортного средства 2, позиция выезда рассматриваемого транспортного средства 1 задается автоматически или вручную. Фиг. 5-16 являются схемами для описания способов автоматического или ручного задания направления выезда рассматриваемого транспортного средства 1.
[0027] Во-первых, как проиллюстрировано на фиг. 5, способ автоматического задания позиции выезда рассматриваемого транспортного средства 1 может включать в себя способ задания направления выезда в направлении движения по проезду для выезда. При этом в качестве примеров способа определения направления движения по проезду для выезда могут быть приведены следующие способы (1)-(4):
(1) способ обнаружения дорожного знака и/или разметки на поверхности дороги, указывающих направление движения, из информации изображений, полученной камерами 11-14, и определения направления движения по проезду для выезда как направления, указываемого обнаруженными дорожным знаком и/или разметкой на дороге;
(2) способ обнаружения направления движения другого транспортного средства из информации изображений, полученной камерами 11-14, или информации о дальности, полученной дальномерным устройством 15, и определения направления движения по проезду для выезда как обнаруженного направления движения другого транспортного средства;
(3) способ записи предыстории поездок, включающей направления движения до тех пор, пока рассматриваемое транспортное средство не въехало на позицию парковки, и определения направления движения по проезду для выезда как направления движения, включенного в предысторию поездок; и
(4) способ приема направления движения из базовой станции автомобильной парковки и определения направления движения по проезду для выезда как принятого направления движения.
[0028] В качестве одного примера, способ автоматического задания позиции выезда рассматриваемого транспортного средства 1 может представлять собой способ задания позиции выезда на основе предыстории предыдущих выездов рассматриваемого транспортного средства 1. В этом способе задания направление выезда задается вправо, когда значение J определения, представленное следующим уравнением (1), является положительным значением, тогда как направление выезда задается влево, когда значение J определения является отрицательным значением:
уравнение 1
где Ti – истекшее время, и Di представляет направление выезда; Di=+1 для направления вправо, и Di=-1 для направления влево.
[0029] В таблице 1 приведен пример предыстории выездов. Для приведенной в таблице автомобильной парковки A получается J=(((1/1)×(+1))+((1/2)×(+1))+((1/2)×(+1)))=+2, что представляет направление вправо. Аналогично, для автомобильной парковки B получается J=(((1/2)×(-1))+((1/2)×(-1))+((1/4)×(-1)))=-1,25, что представляет направление влево. Для автомобильной парковки C получается J=(((1/2)×(+1))+((1/1)×(+1))+((1/1)×(-1)))=+0,5, что представляет направление вправо. Таким образом, включение истекшего времени в вышеуказанное уравнение (1) обеспечивает возможность выполнения определения так, что приоритезируется последняя история выезда. Другими словами, даже в том случае, если рассматриваемое транспортное средство предпочтительно выезжало в направлении влево в предыдущие разы, когда рассматриваемое транспортное средство предпочтительно выезжало в направлении вправо в последней истории, рассматриваемое транспортное средство должно выезжать в направлении вправо. Это обеспечивает возможность рассматриваемому транспортному средству выезжать в соответствии с текущим окружением для выезда. Истекшее время, перечисленное в следующей таблице 1, задается в единицах часов, к примеру, как один час, но настоящее изобретение не ограничено этим, и также могут использоваться секунды, минуты и дни.
Таблица 1
|
[0030] В качестве примера, как проиллюстрировано на фиг. 6, способ автоматического задания позиции выезда рассматриваемого транспортного средства 1 может включать в себя способ задания направления выезда в направлении пути R в целевую точку, поиск которой выполняется навигационной системой 70.
[0031] Фиг. 7 и 8 являются блок-схемами, иллюстрирующими процедуры автоматического задания позиции выезда рассматриваемого транспортного средства 1 согласно одному или более вариантам осуществления настоящего изобретения. Фиг. 7 является блок-схемой, иллюстрирующей процедуру задания позиции выезда рассматриваемого транспортного средства 1 в соответствии с расстоянием до пункта назначения. Как проиллюстрировано на блок-схеме этой фигуры, на этапе S1 модуль 501 задания позиций выезда сначала вычисляет расстояние до пункта назначения при выезде в направлении вправо. Затем, на этапе S2, модуль 501 задания позиций выезда вычисляет расстояние до пункта назначения при выезде в направлении влево. Затем, на этапе S3, модуль 501 задания позиций выезда определяет, меньше или нет расстояние до пункта назначения при выезде в направлении вправо, чем расстояние до пункта назначения при выезде в направлении влево. При положительном определении выполняется этап S4, тогда как при отрицательном определении выполняется этап S5. На этапе S4 модуль 501 задания позиций выезда задает направление выезда в направлении вправо. С другой стороны, на этапе S5 модуль 501 задания позиций выезда задает направление выезда в направлении влево. Процесс таким образом завершается.
[0032] Фиг. 8 является блок-схемой, иллюстрирующей процедуру задания позиции выезда рассматриваемого транспортного средства 1 в соответствии с требуемым временем до пункта назначения. Как проиллюстрировано на блок-схеме этой фигуры, на этапе S11 модуль 501 задания позиций выезда сначала вычисляет требуемое время до пункта назначения при выезде в направлении вправо. Затем, на этапе S12, модуль 501 задания позиций выезда вычисляет требуемое время до пункта назначения при выезде в направлении влево. Затем, на этапе S13, модуль 501 задания позиций выезда определяет, меньше или нет требуемое время до пункта назначения при выезде в направлении вправо, чем требуемое время до пункта назначения при выезде в направлении влево. При положительном определении выполняется этап S14, тогда как при отрицательном определении выполняется этап S15. На этапе S14 модуль 501 задания позиций выезда задает направление выезда в направлении вправо. С другой стороны, на этапе S15, модуль 501 задания позиций выезда задает направление выезда в направлении влево. Процесс таким образом завершается.
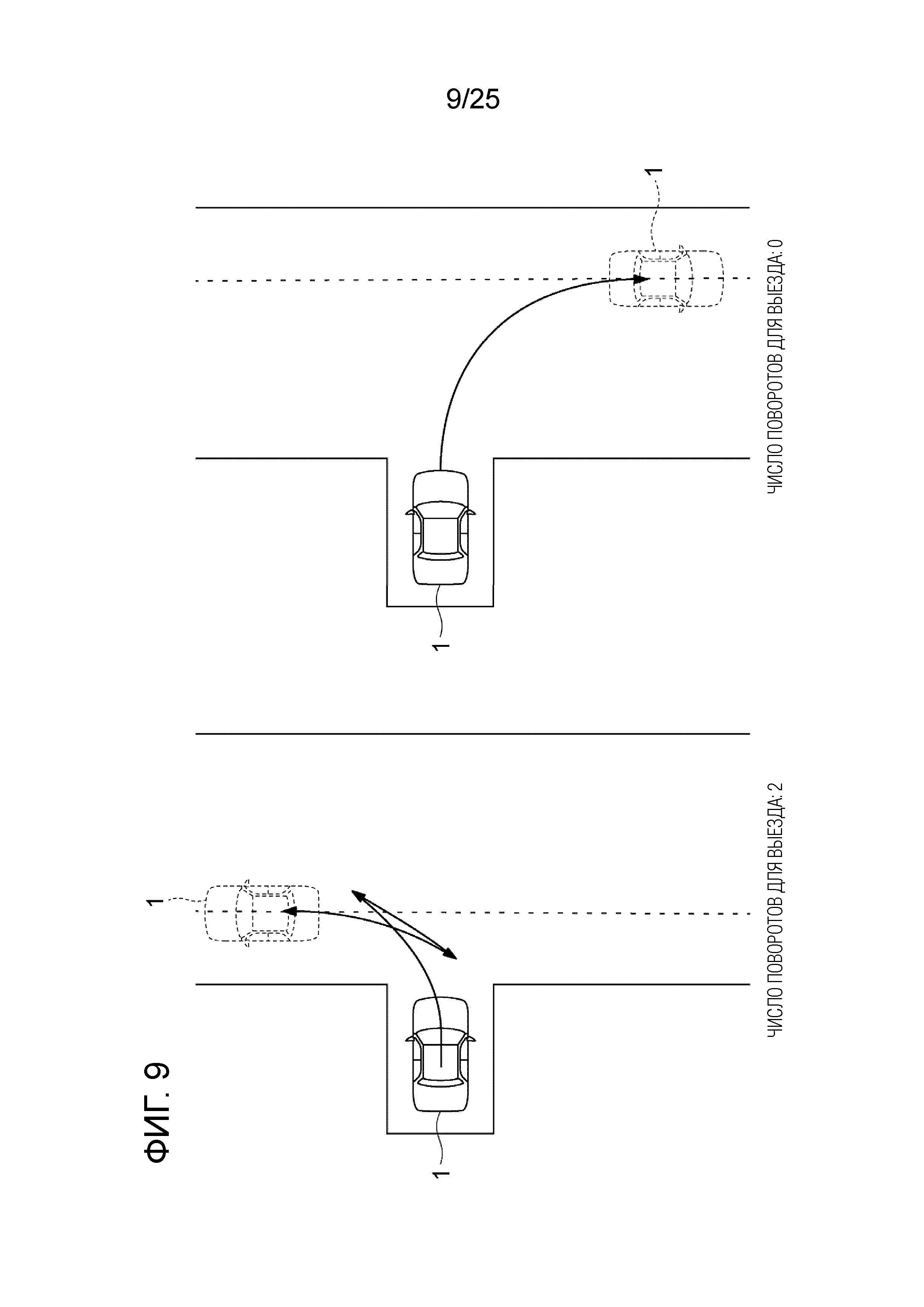
[0033] В качестве примера, как проиллюстрировано на фиг. 9, способ автоматического задания позиции выезда рассматриваемого транспортного средства 1 может включать в себя способ задания направления выезда в том направлении, в котором мало число поворотов для выезда. Как проиллюстрировано на левой схеме по фиг. 9, число поворотов для выезда равно двум при выезде в направлении влево, а как проиллюстрировано на правой схеме по фиг. 9, при выезде в направлении вправо число поворотов для выезда равно нулю. В этом случае направление выезда задается в направлении вправо.
[0034] Далее описывается способ задания позиции выезда рассматриваемого транспортного средства 1, когда рассматриваемым транспортным средством 1 управляют на выезд под удаленным управлением. Примеры способа ручного задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением, включают в себя способ задания позиции выезда в соответствии с работой дисплея с сенсорной панелью или функциональной клавиши навигационной системы 70, способ задания позиции выезда в соответствии с работой дисплея с сенсорной панелью или функциональной клавиши мобильного терминала, такого как смартфон, способ задания позиции выезда в соответствии с работой рычага переключения указателя поворота, способ задания позиции выезда в соответствии с углом поворота руля и/или крутящим моментом, обнаруженным при рулении, и способ задания позиции выезда в соответствии с работой кнопки ключа удаленного управления. Как проиллюстрировано на фиг. 10, ключ 3 удаленного управления может быть снабжен кнопкой 3L для инструктирования выезда в направлении влево и кнопкой 3R для инструктирования выезда в направлении вправо.
[0035] Примеры способа ручного задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением, дополнительно включают в себя способ задания позиции выезда в соответствии с движением оператора 4, как проиллюстрировано на фиг. 11. В этом приведенном в качестве примера способе, например, когда оператор 4 указывает направление выезда своей рукой, движение оператора 4 обнаруживается с использованием камер 11-14 и/или бортового датчика, такого как дальномерное устройство 15 рассматриваемого транспортного средства 1, датчик, предусмотренный на мобильном терминале или удаленном контроллере, носимом оператором 4, датчик, установленный на автомобильной парковке, либо иной соответствующий датчик.
[0036] Примеры способа автоматического задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением, включают в себя способ задания позиции выезда в окрестности оператора 4, как проиллюстрировано на фиг. 12. В этом способе примеры способа обнаружения позиции оператора 4 включают в себя способ обнаружения позиции оператора 4 с использованием соответствующего датчика, такого как камеры 11-14, дальномерное устройство 15 или другой бортовой датчик рассматриваемого транспортного средства 1, датчик, предусмотренный на мобильном терминале или удаленном контроллере, носимом оператором 4, либо датчик, установленный на автомобильной парковке. Примеры способа выбора направления выезда включают в себя способ сравнения расстояния между позицией выезда в направлении вправо и оператором 4 с расстоянием между позицией выезда в направлении влево и оператором 4 и выбор позиции выезда в направлении, в котором это расстояние меньше другого.
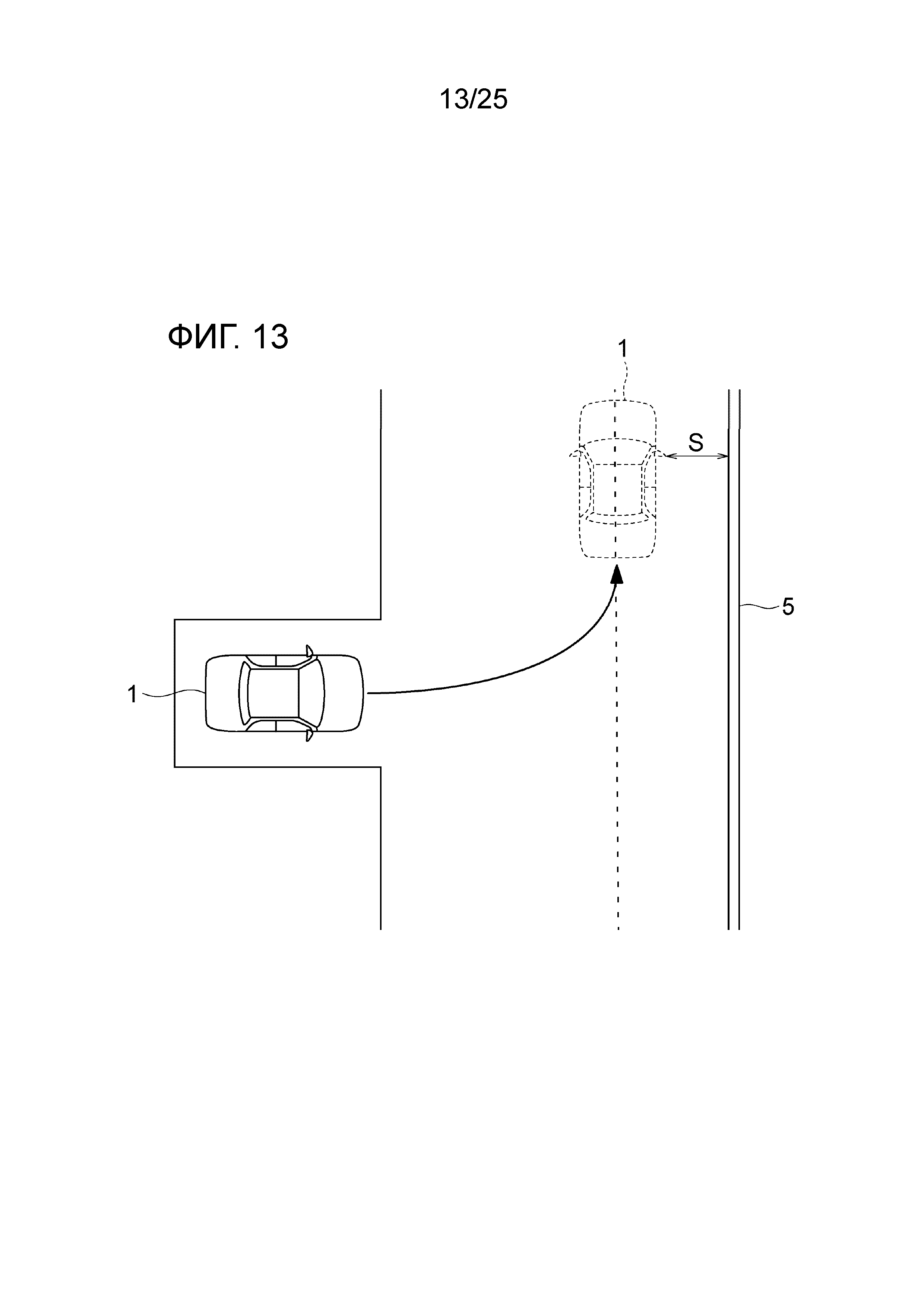
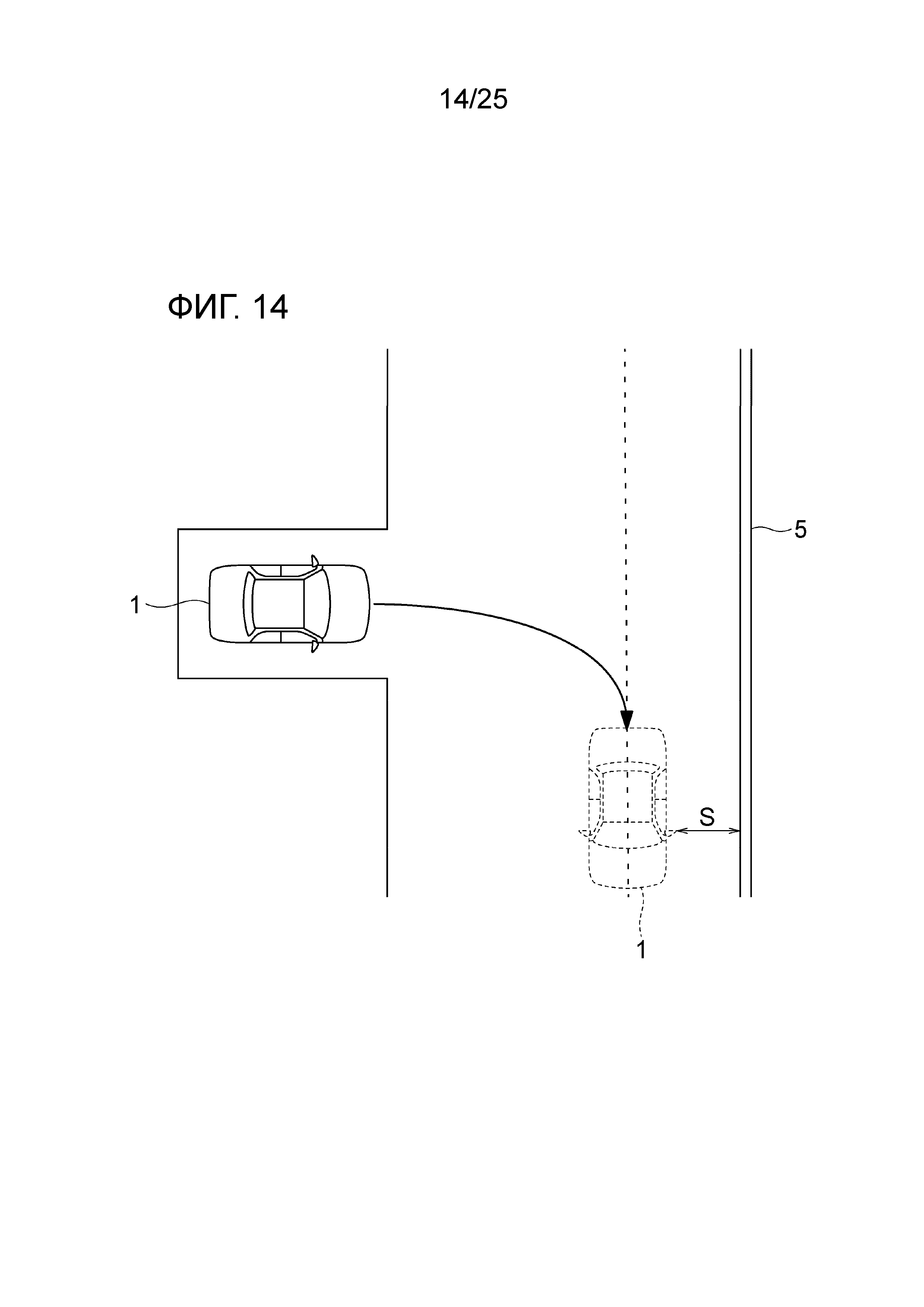
[0037] Примеры способа автоматического задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением, дополнительно включают в себя способ задания позиции выезда в качестве позиции, в которой оператор 4 может легко садиться в рассматриваемое транспортное средство 1, как проиллюстрировано на фиг. 13 и 14. Примеры позиции, в которой оператор 4 может легко садиться в рассматриваемое транспортное средство 1, включают в себя такую позицию, при которой оператору 4 может обеспечиваться пространство S для его посадки на водительское сиденье между дверью со стороны водительского сиденья рассматриваемого транспортного средства 1 и стеной 5, как проиллюстрировано на фиг. 13, и такую позицию, при которой оператору 4 может обеспечиваться пространство S для его посадки на переднее пассажирское сиденье между дверью со стороны переднего пассажирского сиденья рассматриваемого транспортного средства 1 и стеной 5, как проиллюстрировано на фиг. 14.
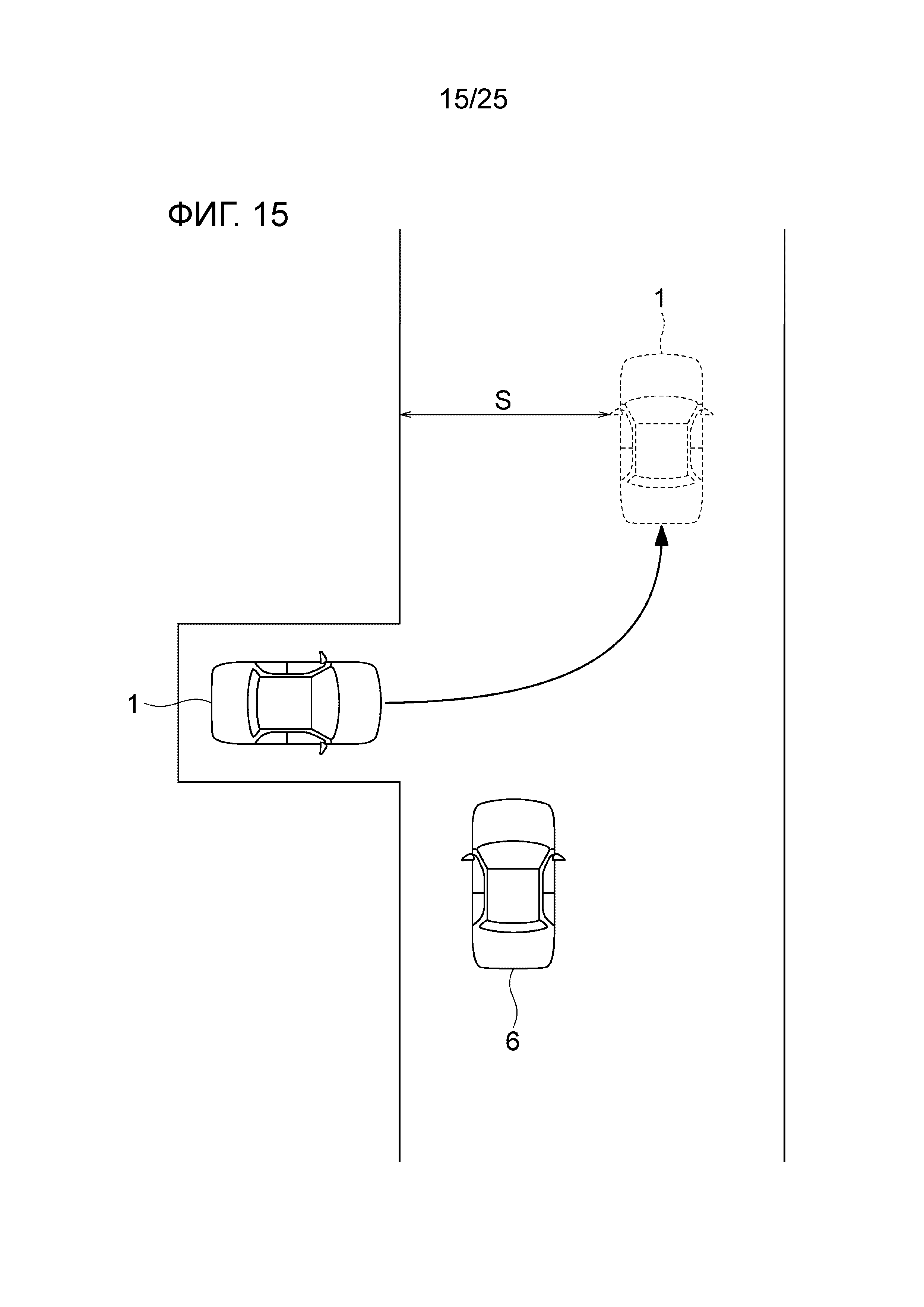
[0038] Примеры способа автоматического задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением, дополнительно включают в себя способ задания позиции выезда на такую позицию, при которой обеспечивается пространство S для проезда другого транспортного средства 6 между позицией парковки и позицией выезда, как проиллюстрировано на фиг. 15.
[0039] Примеры способа автоматического задания позиции выезда рассматриваемого транспортного средства 1, которым управляют на выезд под удаленным управлением на «безлюдной» автомобильной парковке (т.е. без водителей и операторов), как проиллюстрировано на фиг. 16, включают в себя способ задания позиции выезда в соответствии с командой из базовой станции 7 автомобильной парковки. Примеры предписанного командой из базовой станции 7 направления выезда включают в себя направление, в котором расстояние до выезда 8 с автомобильной парковки является коротким, и направление, соответствующее направлению движения другого транспортного средства 6.
[0040] Снова ссылаясь на фиг. 2, модуль 502 задания начальных позиций выезда задает позицию, в которой начинается процесс помощи при выезде (эта позиция в дальнейшем называется "начальной позицией выезда"), и выводит ее в модуль 505 формирования путей выезда. Например, когда задействован главный переключатель 40, модуль 502 задания начальных позиций выезда получает текущую позицию рассматриваемого транспортного средства 1 в данное время из модуля 701 оценки текущей позиции и задает полученную текущую позицию в качестве начальной позиции выезда.
[0041] Модуль 503 оценки ширины проезда оценивает ширину X проезда для выезда (в дальнейшем называется "шириной проезда") и выводит ее в модуль 505 формирования путей выезда. Например, как проиллюстрировано на фиг. 17, когда рассматриваемое транспортное средство 1 выезжает в проезд между парковочными местами 9 и стеной 5, ширину X проезда можно получить посредством обнаружения положений рамок парковочных мест 9 из информации изображений, полученной камерами 11-14, выявления расстояния от рассматриваемого транспортного средства 1 до стены 5 из информации о дальности, полученной дальномерным устройством 15, и/или информации изображений, полученной камерами 11-14, и проведения оценки ширины X проезда между рамками парковочных мест 9 и стеной 5. Вместо положений парковочных мест 9 может обнаруживаться позиция припаркованного транспортного средства 2 и может оцениваться расстояние между припаркованным транспортным средством 2 и стеной 5 в качестве ширины X проезда, либо в качестве ширины X проезда может оцениваться расстояние между рассматриваемым транспортным средством 1 и стеной 5. Ширина X проезда может быть оценена и записана на основе информации о дальности, полученной дальномерным устройством 15, и/или информации изображений, полученной камерами 11-14, во время въезда. Примеры датчика для измерения расстояния от рассматриваемого транспортного средства 1 до стены 5 включают в себя сонарные датчики, инфракрасные датчики, лазерные датчики, радарные датчики и стереокамеры. Непринципиально оценивать ширину X проезда на основе обнаруженной информации, полученной камерами 11-14 и/или дальномерным устройством 15. Например, информацию о ширине X проезда можно получать, например, посредством связи с окружающей транспортное средство средой, т.е. так называемой связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами. Здесь, в качестве примера, связь между транспортным средством и дорожной инфраструктурой может представлять собой связь между базовой станцией автомобильной парковки и рассматриваемым транспортным средством 1.
[0042] Снова ссылаясь на фиг. 2, модуль 504 обнаружения окружающих объектов обнаруживает припаркованное транспортное средство 2, смежное с рассматриваемым транспортным средством 1, и выводит результат обнаружения в модуль 505 формирования путей выезда. В качестве примера, как проиллюстрировано на фиг. 18, способ обнаружения смежного припаркованного транспортного средства 2 может быть способом обнаружения с использованием камер 11-14 и/или бортового датчика, такого как дальномерное устройство 15. Примеры бортового датчика включают в себя сонарные датчики, инфракрасные датчики, лазерные датчики, радарные датчики и стереокамеры. Здесь, в качестве примера, условие определения присутствия или отсутствия смежного припаркованного транспортного средства 2 может быть таким условием определения, при котором, когда расстояние между попадающим в диапазон RD обнаружения бортового датчика объектом и рассматриваемым транспортным средством 1 становится пороговым значением или меньше, выполняют определение, что смежное припаркованное транспортное средство 2 присутствует. Пороговое значение в этом случае может задаваться на основе расстояния между припаркованными транспортными средствами 2 на обычной автомобильной парковке.
[0043] В качестве примера, как проиллюстрировано на фиг. 19, способ обнаружения смежного припаркованного транспортного средства 2 может быть способом обнаружения присутствия или отсутствия смежного припаркованного транспортного средства 2 по состоянию обнаружения белой разметочной линии WL на дальней стороне смежной парковочной рамки. Здесь, в качестве примера, условие определения присутствия или отсутствия смежного припаркованного транспортного средства 2 может быть таким условием определения, при котором, когда длина обнаруженной разметочной линии WL не превышает пороговое значение, выполняют определение, что смежное припаркованное транспортное средство 2 присутствует. Пороговое значение в этом случае может задаваться равным длине, которая немного меньше длины обычной разметочной линии WL.
[0044] Непринципиально обнаруживать присутствие или отсутствие смежного припаркованного транспортного средства 2 с использованием бортового датчика. Например, информацию о присутствии или отсутствии смежного припаркованного транспортного средства 2 можно получать посредством связи с окружающей транспортное средство средой, т.е. так называемой связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами. Здесь, в качестве примера, связь между транспортным средством и дорожной инфраструктурой может быть связью между базовой станцией автомобильной парковки и рассматриваемым транспортным средством 1.
[0045] Снова ссылаясь на фиг. 2, модуль 505 формирования путей выезда формирует путь из начальной позиции выезда, заданной модулем 502 задания начальных позиций выезда, в позицию выезда, заданную модулем 501 задания позиций выезда (этот путь в дальнейшем называется "путем выезда"), и выводит сформированный путь выезда в модуль 506 управления следованием по пути выезда и модуль 507 формирования целевой скорости. В этом процессе формирования пути выезда вычисляют путь выезда в соответствии с присутствием или отсутствием смежного припаркованного транспортного средства 2 и взаимным относительным расположением смежного припаркованного транспортного средства 2 и рассматриваемого транспортного средства 1.
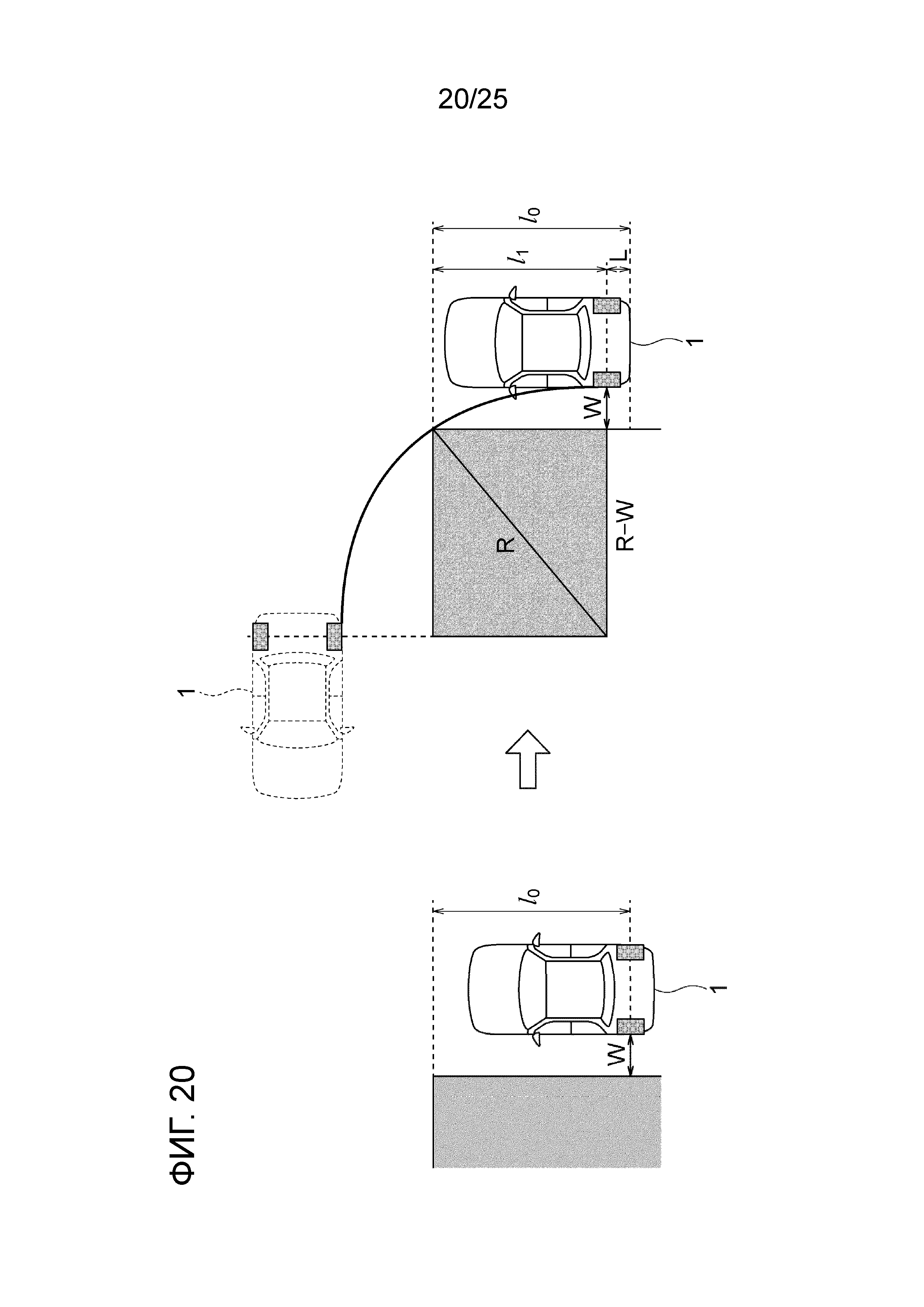
[0046] Фиг. 20 является схемой для описания процесса формирования пути выезда рассматриваемого транспортного средства 1, выезжающего передним ходом, а фиг. 21 является схемой для описания процесса формирования пути выезда рассматриваемого транспортного средства 1, выезжающего задним ходом. Как проиллюстрировано на фиг. 20, когда смежный объект, такой как припаркованное транспортное средство, присутствует рядом с рассматриваемым транспортным средством 1, и рассматриваемое транспортное средство 1 управляется на выезд передним ходом в ту сторону, с которой присутствует смежный объект, путь выезда формируют таким образом, что рассматриваемое транспортное средство 1 управляется сначала с перемещением линейно вперед (это перемещение в дальнейшем называется "линейным перемещением") и затем поворачивать таким образом, чтобы не создавать помехи смежному объекту.
[0047] В ситуации, проиллюстрированной на фиг. 20, модуль 505 формирования путей выезда формирует путь выезда, который удовлетворяет следующим уравнениям (2) и (3):
уравнение 2
уравнение 3
где L – длина участка линейного перемещения от начальной позиции выезда (эта длина в дальнейшем называется "расстоянием линейного перемещения"), l0 – расстояние от задней оси колес рассматриваемого транспортного средства 1, расположенного в начальной позиции выезда, до переднего конца смежного объекта, l1 – расстояние от задней оси колес рассматриваемого транспортного средства 1, которое продвинулось вперед на L, до переднего конца смежного объекта, w – просвет между рассматриваемым транспортным средством 1 и смежным объектом, и R – радиус поворота с привязкой к заднему внутреннему колесу рассматриваемого транспортного средства 1, которое продвинулось вперед на L.
[0048] Как проиллюстрировано на фиг. 21, когда смежные объекты, такие как смежные транспортные средства, присутствуют с обеих сторон от рассматриваемого транспортного средства 1, и рассматриваемое транспортное средство 1 управляется на выезд задним ходом в сторону, с которой присутствует один из смежных объектов, путь выезда формируют таким образом, что рассматриваемое транспортное средство 1 управляется сначала с перемещением линейно вперед (это перемещение в дальнейшем называется "линейным перемещением") и затем поворачивать таким образом, чтобы не создавать помехи смежным объектам с обеих сторон. В такой ситуации модуль 505 формирования путей выезда вычисляет путь заднего внутреннего колеса, который удовлетворяет вышеуказанным уравнениям (2) и (3), и путь переднего наружного колеса, который удовлетворяет вышеуказанному уравнению (2) и следующему уравнению (4):
уравнение 4
где T – ширина рассматриваемого транспортного средства 1.
[0049] При этом непринципиально формировать путь выезда, который включает в себя расстояние L линейного перемещения. Например, когда рассматриваемое транспортное средство 1 не создает помехи смежным объектам при начале поворота из начальной позиции выезда, либо когда смежные объекты не присутствуют, расстояние линейного перемещения может быть равным нулю (L=0). В одном или более вариантах осуществления настоящего изобретения, когда расстояние между осью задних колес рассматриваемого транспортного средства 1, расположенного в начальной позиции выезда, и передним концом смежного объекта меньше l1 и когда смежные объекты не обнаружены, модуль 505 формирования путей выезда формирует путь выезда таким образом, что расстояние линейного перемещения равно нулю (L=0). Тем не менее, если место рядом с рассматриваемым транспортным средством 1 представляет собой запрещенную для движения область или область, в которой состояние поверхности дороги является плохим, модуль 505 формирования путей выезда формирует путь выезда, который включает в себя расстояние L линейного перемещения, как и в случае, в котором смежный объект присутствует. Примеры области, в которой состояние поверхности дороги является плохим, включают в себя области, в которых присутствует лужа воды, грязь, снег, лед, масло и т.д. Формируя путь выезда, который не проходит через такую область, можно предотвращать ухудшение точности помощи при выезде вследствие грязи или скольжения кузова транспортного средства.
[0050] Фиг. 22 является блок-схемой, иллюстрирующей процедуру процесса формирования пути выезда, а фиг. 23 и 24 являются схемами для описания процесса формирования пути выезда. Процесс формирования пути выезда, представленный блок-схемой по фиг. 22, начинается, когда включен главный переключатель 40 и дана команда на начало помощи при выезде, и процедура переходит к этапу S101.
[0051] На этапе S101 модуль 505 формирования путей выезда вычисляет расстояние от задней оси колес рассматриваемого транспортного средства 1, расположенного в начальной позиции выезда, до задней концевой части (к примеру, стены или парковочной рамки) проезда для выезда (это расстояние в дальнейшем называется "заданным значением глубины") на основе информации изображений, полученной камерами 11-14, и/или информации о дальности, полученной дальномерным устройством 15. Затем, на этапе S102, модуль 505 формирования путей выезда задает целевую линию TL выезда на проезде для выезда. Примеры целевой линии TL выезда включают в себя центральную линию проезда для выезда (см. фиг. 23) и центральную линию ближнего полупроезда или дальнего полупроезда. Ближний полупроезд и дальний полупроезд получаются делением проезда для выезда на два в направлении по ширине. Непринципиально выполнять этап S101 до этапа S102, и этап S102 может выполняться до этапа S101.
[0052] Затем, на этапе S103, модуль 505 формирования путей выезда определяет то, обнаружено ли или нет смежное припаркованное транспортное средство 2 модулем 504 обнаружения окружающих объектов. При положительном определении на этом этапе далее выполняют этап S104, тогда как при отрицательном определении далее выполняют этап S105. На этапе S104 модуль 505 формирования путей выезда вычисляет расстояние L линейного перемещения на основе вышеуказанных уравнений (2) и (3) при выезде передним ходом или на основе вышеуказанных уравнений (2)-(4) при выезде задним ходом. В зависимости от взаимного относительного расположения оси задних колес рассматриваемого транспортного средства 1 и переднего конца смежного припаркованного транспортного средства 2, расстояние линейного перемещения может быть равным нулю (L=0). С другой стороны, на этапе S105 модуль 505 формирования путей выезда задает расстояние линейного перемещения равным нулю (L=0).
[0053] После этапов S104 и S105 выполняют этап S106, на котором модуль 505 формирования путей выезда вычисляет радиус R поворота на основе вышеуказанных уравнений (2) и (3) при выезде передним ходом или на основе вышеуказанных уравнений (2)-(4) при выезде задним ходом и формирует путь выезда в соответствии с расстоянием L линейного перемещения, заданным на этапе S104 или S105, и радиусом R поворота, вычисленным на этом этапе.
[0054] При этом, как проиллюстрировано на фиг. 23, когда смежное припаркованное транспортное средство 2 присутствует, расстояние L линейного перемещения и радиус R поворота задаются таким образом, что образуется просвет между поворачивающим транспортным средством 1 и смежным припаркованным транспортным средством 2 до такой степени, что у водителя и пассажиров не вызывается некомфортное ощущение. Поэтому, когда смежное припаркованное транспортное средство 2 присутствует, путь выезда формируется таким образом, что рассматриваемое транспортное средство 1 проезжает за пределами смежного парковочного места 9. С другой стороны, как проиллюстрировано на фиг. 24, когда смежное припаркованное транспортное средство 2 не присутствует, путь выезда формируется таким образом, что рассматриваемое транспортное средство 1 проезжает через смежное парковочное место 9.
[0055] Снова ссылаясь на фиг. 22, на этапе S107 модуль 505 формирования путей выезда определяет то, может ли или нет рассматриваемое транспортное средство 1 достичь целевой линии TL выезда, когда рассматриваемое транспортное средство 1 управляется на выезд по сформированному на этапе S106 пути выезда. При положительном определении на этом этапе далее выполняют этап S108, тогда как при отрицательном определении далее выполняют этап S109.
[0056] На этапе S108 модуль 505 формирования путей выезда определяет то, может ли или нет рассматриваемое транспортное средство 1 двигаться в пределах ширины проезда, соответствующей заданному значению глубины, заданному на этапе S101, когда рассматриваемое транспортное средство 1 управляется на выезд вдоль сформированного на этапе S106 пути выезда. Положительное определение на этом этапе завершает процесс, тогда как при отрицательном определении далее выполняют этап S109.
[0057] На этапе S109 модуль 505 формирования путей выезда формирует путь выезда, который включает в себя один или более наборов поворотов для выезда. Затем процедура возвращается к этапу S107, и этапы S107-S109 выполняют многократно. При этом, когда отрицательное определение снова выполнено на этапе S107 или этапе S108, формируется путь выезда, который включает в себя два или более наборов поворотов для выезда.
[0058] Как описано выше, в способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения выполняют определение того, присутствует ли или нет смежное припаркованное транспортное средство 2 в парковочном месте 9, смежном с начальной позицией выезда рассматриваемого транспортного средства 1, и когда смежное припаркованное транспортное средство 2 не присутствует, формируют путь выезда, который включает в себя это смежное парковочное место 9 (см. фиг. 24). Это позволяет расширять возможные варианты для пути выезда, например, по сравнению со случаем, в котором путь на позицию парковки записывается на стадии парковки, и записанный путь задается в качестве пути выезда, и со случаем, в котором путь выезда формируется независимо от присутствия или отсутствия смежного припаркованного транспортного средства 2, к примеру, со случаем предварительного задания пути выезда.
[0059] При этом, при формировании пути выезда, который включает в себя смежное парковочное место 9, можно уменьшать расстояние L линейного перемещения из начальной позиции выезда и/или уменьшать радиус поворота по сравнению с формированием пути выезда, который не включает в себя смежное парковочное место 9. Это позволяет рассматриваемому транспортному средству легко достигать целевой линии TL выезда, при этом уменьшив число поворотов для выезда и уменьшив время выезда.
[0060] Может быть предусмотрена возможность использовать способ обнаружения незанятого места из доступной информации, такой как информация изображений, полученная камерой, и формирования пути выезда, который проходит через незанятое место. Когда этот способ включает в себя обнаружение незанятого места из информации изображений, полученной камерой, на эту информацию изображений может влиять сильный солнечный свет и темные тени днем, недостаточное освещение, подсветка и отражение света ночью и т.д. Поэту затруднительно обеспечить точность обнаружения на открытом воздухе, и этот способ может осуществляться только под землей или в закрытом помещении. Таким образом, в зависимости от окружающей среды, может быть трудно оценить особенности незанятого места (такие как ширина и длина и присутствие или отсутствие результата обнаружения разметочных линий) или точно оценить незанятое место, и путь выезда не может формироваться с высокой степенью точности.
[0061] Напротив, в способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения, когда присутствие или отсутствие смежного припаркованного транспортного средства 2 обнаруживается на основе информации изображений, полученной камерой, и/или информации о дальности, полученной дальномерным устройством 15, обеспечение точности обнаружения присутствия или отсутствия смежного припаркованного транспортного средства 2 является простым независимо от окружающей яркости и т.п., т.е. независимо от того, находится смежное припаркованное транспортное средство 2 на улице или в закрытом помещении. Другими словами, обнаружение присутствия или отсутствия смежного припаркованного транспортного средства 2 проще оценки особенностей незанятого места и точной оценки незанятого места. Таким образом, пространство для формирования пути выезда может оцениваться с высокой степенью точности независимо от окружающей среды, и путь выезда может быть сформирован с высокой степенью точности.
[0062] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения, когда смежное припаркованное транспортное средство 2 присутствует, формируют путь выезда, который включает в себя участок линейного перемещения для линейного перемещения из начальной позиции выезда и участок поворота для поворота из конечной точки участка линейного перемещения таким образом, чтобы не создавать помехи смежному припаркованному транспортному средству 2 (см. фиг. 23). При этом длина L участка линейного перемещения задается в соответствии с шириной W между смежным припаркованным транспортным средством 2 и рассматриваемым транспортным средством 1 (см. фиг. 20 и 21). За счет этой операции, когда смежное припаркованное транспортное средство 2 присутствует, путь выезда может формироваться таким образом, чтобы не создавать помехи смежному припаркованному транспортному средству 2, а когда смежное припаркованное транспортное средство 2 не присутствует, путь выезда может формироваться таким образом, что он включает в себя смежное парковочное место 9.
[0063] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения, когда смежное припаркованное транспортное средство не присутствует, длина L участка линейного перемещения задается равным нулю. За счет этой операции, когда смежное припаркованное транспортное средство 2 не присутствует, путь выезда может формироваться таким образом, что он включает в себя смежное парковочное место 9.
[0064] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения, когда смежное припаркованное транспортное средство 2 присутствует, целевая позиция выезда задается в соответствии с позицией смежного припаркованного транспортного средства 2 и направлением движения транспортных средств в проезде для выезда (см. фиг. 3 и 4). Например, как описано выше, когда смежное припаркованное транспортное средство 2 присутствует с правой стороны, проезд для выезда имеет правостороннее движение, и рассматриваемое транспортное средство выезжает передним ходом, позиция выезда задается налево. Это обеспечивает возможность формирования пути выезда, который умеренно изгибается от начальной позиции выезда до целевой позиции выезда, и можно облегчить некомфортное ощущение, возникающее у водителя или пассажира при выездах.
[0065] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения принимается команда оператора, указывающая целевую позицию выезда, и целевая позиция выезда задается в соответствии с принятой командой (см. фиг. 10 и 11). Например, как описано выше, может приниматься команда оператора, отданная с использованием кнопки 3L или 3R ключа 3 удаленного управления, или команда оператора 4 может приниматься посредством обнаружения движения оператора 4. Это позволяет транспортному средству выезжать в позицию, которая требуется оператору 4, и возникающее у оператора 4 некомфортное ощущение при выезде транспортного средства может облегчаться.
[0066] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения целевая позиция выезда задается в соответствии с предварительно установленным условием автоматического задания (см. фиг. 5-9 и фиг. 12-16). Например, целевая позиция выезда может задаваться таким образом, что направление движения по проезду для выезда и направление выезда являются идентичными (см. фиг. 5). В дополнение или альтернативно, целевая позиция выезда может задаваться таким образом, что направление пути R до пункта назначения, поиск которого выполняется с использованием навигационной системы 70, и направление выезда являются идентичными (см. фиг. 6). В дополнение или альтернативно, целевая позиция выезда может задаваться в направлении, в котором мало число поворотов для выезда (см. фиг. 9). Это может облегчать некомфортное ощущение, возникающее у водителя или пассажира при выездах.
[0067] В способе помощи при выезде согласно одному или более вариантам осуществления настоящего изобретения целевая позиция выезда задается в соответствии с позицией оператора, выполняющего удаленное управление рассматриваемым транспортным средством 1 (см. фиг. 12-14). Например, целевая позиция выезда может задаваться поблизости от оператора 4 (см. фиг. 12). В дополнение или альтернативно, целевая позиция выезда может задаваться в ту позицию, на которой оператору 4 может обеспечиваться пространство S для посадки на водительское сиденье между дверью со стороны водительского сиденья рассматриваемого транспортного средства 1 и стеной 5 (см. фиг. 13). В альтернативном варианте осуществления целевая позиция выезда может задаваться в ту позицию, на которой оператору 4 может обеспечиваться пространство S для посадки на переднее пассажирское сиденье между дверью со стороны переднего пассажирского сиденья рассматриваемого транспортного средства 1 и стеной 5 (см. фиг. 14).
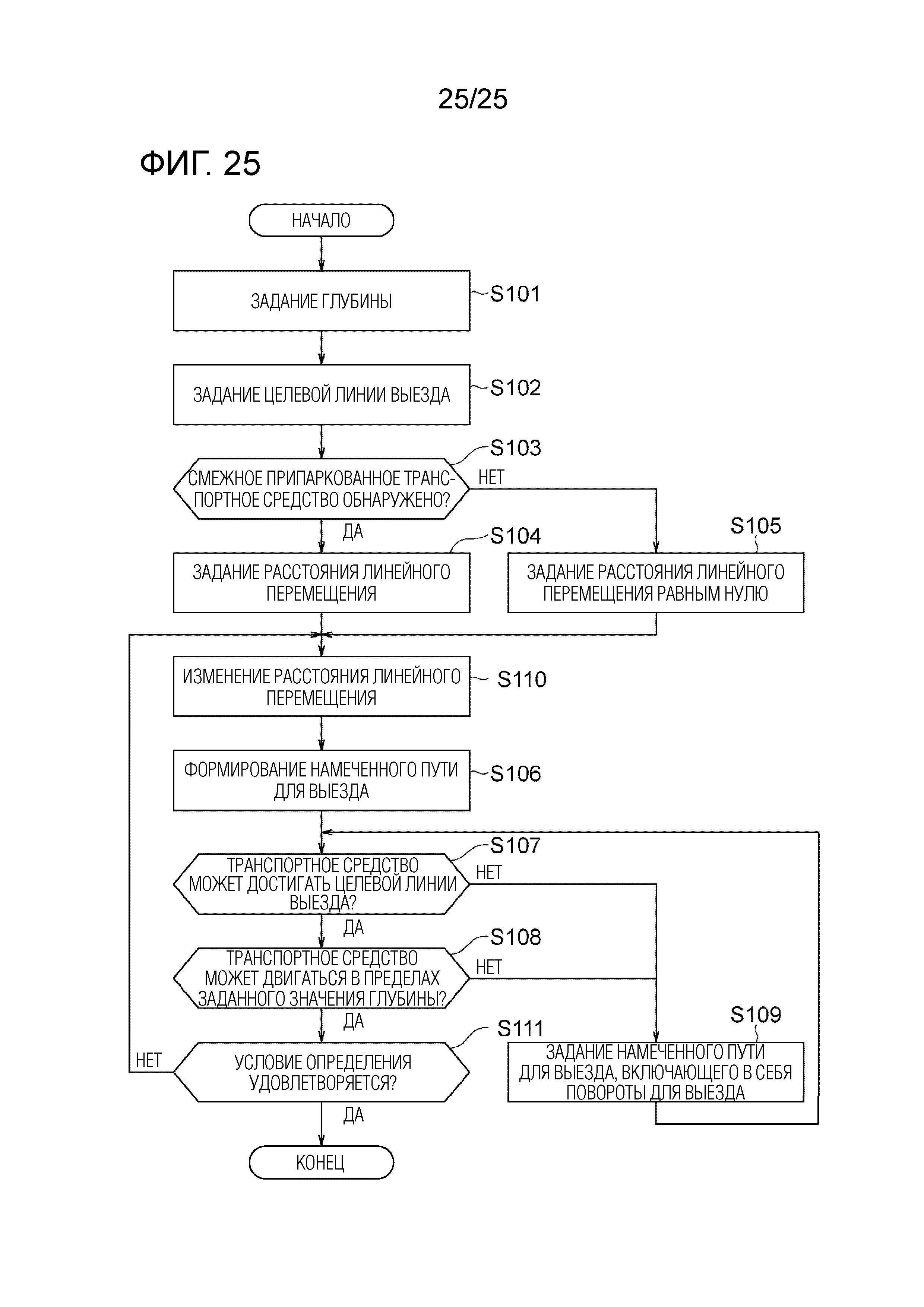
[0068] Фиг. 25 является блок-схемой, иллюстрирующей процедуру процесса формирования пути выезда согласно другому варианту осуществления. Процесс формирования пути выезда, представленный блок-схемой по фиг. 25, начинается, когда включен главный переключатель 40 и дана команда на начало помощи при выезде, и выполняются этапы S101-S105 блок-схемы, проиллюстрированной на фиг. 22.
[0069] После этапов S104 и 105 выполняется этап S110, на котором модуль 505 формирования путей выезда изменяет расстояние L линейного перемещения. На этом этапе продлевается расстояние L линейного перемещения, заданное на этапе S104 или этапе S105. Затем, на этапе S106, модуль 505 формирования путей выезда вычисляет радиус R поворота на основе вышеуказанных уравнений (2) и (3) при выезде передним ходом или на основе вышеуказанных уравнений (2)-(4) при выезде задним ходом и формирует путь выезда в соответствии с расстоянием L линейного перемещения, заданным на этапе S110, и радиусом R поворота, вычисленным на этом этапе.
[0070] Затем выполняются этапы S107-S109 блок-схемы, проиллюстрированной на фиг. 22. Когда на этапе S107 выполнено определение, что рассматриваемое транспортное средство может достичь целевой линии выезда, и затем на этапе S108 выполнено определение, что рассматриваемое транспортное средство может двигаться в пределах диапазона заданного значения глубины, процедура переходит к этапу S111, на котором модуль 505 формирования путей выезда определяет, удовлетворяет ли или нет сформированный путь выезда предварительно установленному условию определения. Когда выполнено отрицательное определение на этом этапе, процедура возвращается к этапу S110, на котором расстояние L линейного перемещения изменяется снова, и выполняются этапы S106-S109 и S111. С другой стороны, положительное определение на этапе S111 завершает процесс.
[0071] При этом процесс изменения расстояния L линейного перемещения на этапе S110 выполняется в соответствии с шириной проезда и/или целевой позицией выезда. Например, чем больше ширина проезда или чем больше расстояние от начальной позиции выезда до целевой позиции выезда, тем большим задается расстояние L линейного перемещения.
[0072] Примеры предварительно установленного условия определения на этапе S111 включают в себя условие определения того, равно ли или нет суммарное расстояние пути выезда предварительно установленному расстоянию или меньше него, и условие определения того, равно ли или нет время выезда предварительно установленному времени или меньше него. В качестве примера, предварительно установленное расстояние или время в условии определения может задаваться равным такой длине, при которой не вызывается некомфортное ощущение у водителя и пассажиров либо у оператора, который выполняет удаленное управление. В примере, цикл этапов S110, S106-S109 и S111 может всегда повторяться множество раз, и оптимальный путь выезда может выбираться на основе условия, такого как расстояние или время, из множества путей выезда, сформированных во время такого повторения. В этом случае примеры предварительно установленного условия определения на этапе S111 включают в себя условие определения, с помощью которого путь выезда выбирается из множества сформированных путей выезда таким образом, что путь выезда максимизирует сумму точек оценки расстояния, времени или т.п.
[0073] Как описано выше, в способе помощи при выезде согласно настоящему варианту осуществления расстояние L линейного перемещения задается в соответствии с условием ширины проезда, целевой позиции выезда или т.п., и путь выезда формируется таким образом, что он включает в себя заданное расстояние L линейного перемещения и удовлетворяет предварительно установленному условию определения. Это обеспечивает возможность формирования пути выезда, который соответствует ощущению водителя и пассажиров или оператора.
[0074] Поясненные выше варианты осуществления описаны для того, чтобы способствовать пониманию настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Поэтому подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, охватывают все конструктивные модификации и эквиваленты, попадающие в пределы технического объема настоящего изобретения.
[0075] Например, когда в вышеописанных вариантах осуществления присутствует смежное припаркованное транспортное средство 2, формируют путь выезда, который не включает в себя смежное парковочное место 9, но это может быть неважным. В одном или более вариантах осуществления настоящего изобретения, при условии, что рассматриваемое транспортное средство может поворачивать без создания помех смежному припаркованному транспортному средству 2, может быть сформирован путь выезда, который включает в себя смежное парковочное место 9.
Описание ссылочных номеров
[0076] 1 - Рассматриваемое транспортное средство
2 - Припаркованное транспортное средство
9 - Парковочное место
50 - ЭБУ помощи при парковке и выезде
100 - Устройство помощи при парковке и выезде
L - длина участка линейного перемещения или расстояние линейного перемещения
W - ширина между рассматриваемым транспортным средством 1 и смежным припаркованным транспортным средством 2
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ и устройство помощи при парковке
Способ и устройство обнаружения мест для парковки
Способ оценки собственного положения и устройство оценки собственного положения
Способ помощи при парковке и устройство помощи при парковке
Способ и устройство помощи при парковке
Способ управления парковкой и оборудование управления парковкой
Способ определения помех, способ помощи при парковке, способ помощи при отъезде и устройство определения помех
Устройство помощи при парковке и способ помощи при парковке
Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством
Способ и устройство дистанционного управления транспортным средством

