Результат интеллектуальной деятельности: Способ построения траекторий высокоскоростных беспилотных летательных аппаратов в зоне размещения средств противодействия
Вид РИД
Изобретение
Изобретение относится к области планирования (построения) траекторий высокоскоростных беспилотных летательных аппаратов (ВБЛА) в условиях необходимости преодоления ими зон с размещенными средствами поражения (противовоздушной или противоракетной обороны, далее ПРО-ПВО).
Известно, что имеются многочисленные средства защиты, в том числе ракетного, противоракетного типа, предназначенные для перехвата и уничтожения воздушных движущихся объектов во время полета их до того, как последние смогут выполнить свои задачи.
Противоракетный маневр, применительно к ВБЛА военного и невоенного назначения (например для предотвращения ракетного обстрела промышленных, хозяйственных беспилотных средств экстремистскими группами и других ситуаций аналогичного характера), есть разновидность мероприятий пассивной противоракетной защиты, заключающаяся в уходе единицы техники с траектории пролета управляемой ракеты или неуправляемого реактивного снаряда противника.
Известен способ уклонения от средств ПВО является маневр, описанный в [1], заключающийся в заблаговременной зигзагообразной расстановке в пространстве некоторой совокупности, так называемых опорных точек, последовательное наведение ВБЛА на которые, определяет его траекторию с маневром. В [2] предложено снижать уязвимость ВБЛА путем реализации специального маневра, исключающего возможность экстраполяции параметров траектории ВБЛА. Предложенный маневр представляет собой траекторию, объединяющую в себе совокупность взаимно перемещающихся в узлах восьмерок, при этом ВБЛА совершает полет по виткам спирали в плоскости, перпендикулярной направлению полета.
К общим недостаткам описанных способов можно отнести тот факт, что заблаговременно рассчитанная траектория имеет форму достаточно гладкой зигзагообразной пространственной кривой в первом случае, и ограничена направлением очередных витков спирали плоскостью, перпендикулярной направлению полета во втором случае, что в обоих случаях, практически не снижает точность экстраполяции траектории полета.
Предложенный в [3] способ, предполагает для снижения вероятности поражения ВБЛА обход летательным аппаратом априорно известных зон ПРО-ПВО. Внутри же зон ПРО-ПВО, если не удается спланировать их обход полностью, предлагается маневрирование в виде одного из нескольких стандартных маневров, в том числе, в соответствии с [4], которые, предположительно не должны позволить произвести целеуказание противоракеты (ПР) на ВБЛА или выход УСП ПР на режим самонаведения на ВБЛА.
Недостатками данного способа являются, во-первых, недостатки, связанные с обходом зон ПРО-ПВО: увеличение времени и дальности полета за счет маневров обхода зон ПРО-ПВО применительно к мобильным комплексам. Во-вторых, это недостатки, связанные с маневрированием ВБЛА в зоне ПРО-ПВО, а именно: отсутствие качественных требований к параметрам маневрирования (время начала и конца маневрирования, количество отдельных маневров и требования к маневрам по перегрузкам и длительности), что не позволяет в целом (качественно) определить возможность уменьшения вследствие таких действий уязвимости ВБЛА. Параметры таких маневров при этом не связаны с параметрами систем ПРО-ПВО и УСП по целеуказанию на объект поражения.
Наиболее близким к заявленному способу осуществления противоперехватного маневра по своей сути, и взятым в качестве прототипа является способ, в основе которого лежит предложенный авторами способа - КВРМ-подход к планированию траекторий изложенный в [5], ключевым понятием которого, являются так называемые КВРМ-траектории, требования к которым изложены там же. Он заключается в том, что предварительно оценивается максимально допустимое время между отдельными маневрами - критическое время маневра (КВМ), и критическое расстояние ухода (КРУ) за КВМ - минимальный «уход» ВБЛА, который уже не может компенсировать («выбрать») УСП в случае самонаведения на ВБЛА. При этом частота маневрирования определяется протяженностью опасной зоны и параметрами отдельного маневра - скоростью БПЛА, вектором ускорения и временем между отдельными маневрами, при этом направление очередного маневра выбирается стохастически в пространственных границах, которые определяются требуемым временем достижения цели и запасом характеристической скорости ВБЛА.
Недостатком этого изобретения является то, что множество траекторий, получающихся в результате применения данного способа, на каждом рубеже маневрирования принадлежат боковой поверхности некоторой геометрической фигуры, получающейся в результате вращения линии траектории отдельного маневра (отвечающей указанным в способе-прототипе требованиям), вокруг оси, содержащей вектор скорости летательного ВБЛА в момент начала маневра. При этом, на каждом рубеже маневрирования, количество возможных попадающих траекторий ВБЛА, при стохастическом выборе направления очередного маневра в некоторых направлениях - снижается (происходит сужение «трубки попадающих траекторий»). В предельном случае, когда конец очередного маневра принадлежит границе «трубки попадающих траекторий», множество возможных направлений очередного маневра, учитывая маневренные возможности ВБЛА, сводиться к достаточно ограниченному количеству направлений, при условии, что противнику известна цель полета ВБЛА. Тогда, задача поражения ВБЛА решается путем направления средств противодействия в область, расположенную с обратной стороны границ «трубки попадающих траекторий», результатом чего будет поражение ВБЛА. Кроме того, при выборе постоянных параметров маневрирования (времени начала маневра и расстояния ухода ВБЛА) как предложено в указанном способе, вероятность успешного прогнозирования момента начала очередного маневра, и конечной точки очередного маневра, при приближении ВБЛА к границам «трубки попадающих траекторий» существенно увеличивается, что снижает вероятность непоражения, и, следовательно увеличивает уязвимость ВБЛА в зоне контроля средств ПРО-ПВО.
Задача настоящего изобретения заключается в построении траекторий ВБЛА, лишенных недостатков, присущих траекториям, построенным по способу-прототипу, а также, обеспечивающих преодоление зон с размещенными средствами противодействия, параметры которых обеспечивают его непоражение (минимизируют вероятность поражения), позволяющих, при этом, успешно достигнуть цели полета внутри таких зон.
Требуемый технический результат достигается тем, что при планировании траектории ВБЛА в зоне маневрирования, используется классический КВРМ-подход, с учетом того, что направление очередного маневра (НОМ) стохастически выбирается исходя из условия обеспечения максимального количества попадающих траекторий на каждом рубеже маневрирования, обеспечивая тем самым, наибольший диаметр «трубки попадающих траекторий» в каждый момент времени, в то время, когда реальная траектория пролегает в области центра сечения «трубки попадающих траекторий» на всех рубежах маневрирования. Это получается, в результате того, что на каждом рубеже маневрирования, направление очередного маневра, стохастически выбирается не из всего множества возможных направлений, при которых множество возможных точек конца очередного маневра на очередном рубеже маневрирования, (определяемого из требования критического времени маневра, равного максимально допустимому времени маневра, при котором невозможно целеуказание на высокоскоростной беспилотный летательный аппарат от радиолокационных станций систем противоракетной и (или) противовоздушной обороны и системы самонаведения управляемого средства поражения этих систем) принадлежат некоторой окружности, с центром в центре масс ВБЛА и радиусом определяемым из требования к минимально допустимому расстоянию, которое не может компенсировать управляемое средство поражения в случае его самонаведения на ВБЛА (или ее отдельным дугам, в случае наличия на данном рубеже маневрирования дополнительных ограничений, обусловленных конструктивными особенностями ВБЛА, требованиями к времени прибытия ВБЛА к цели и т.п.), а из его подмножества, задаваемого таким образом, что множество возможных точек конца очередного маневра принадлежат некоторой дуге данной окружности, ограниченной сектором данной окружности, с центральным углом в 90°, в котором проекция линии направления на цель, на плоскость, перпендикулярную плоскости симметрии ВБЛА содержит в себе биссектрису данного сектора. Кроме того, параметры маневрирования (частота маневрирования и расстояние ухода ВБЛА выбираются не постоянными величинами, а варьируются по мере приближения к цели, оставаясь, при этом в области допустимых значений, исходя из требований, предъявляемым к КВРМ-траекториям. Например так: в начале зоны маневрирования время отдельного маневра (ВОМ) выбирают максимально возможным, исходя из характеристик средств ПРО-ПВО и УСП по подготовке целеуказания на ВБЛА. При каждом очередном маневре время очередного маневра уменьшают пропорционально количеству предстоящих маневров, которое определяется исходя из протяженности зоны обязательного маневрирония, вплоть до минимальных (при подлете к цели), при которых обеспечивается достижение цели полета.
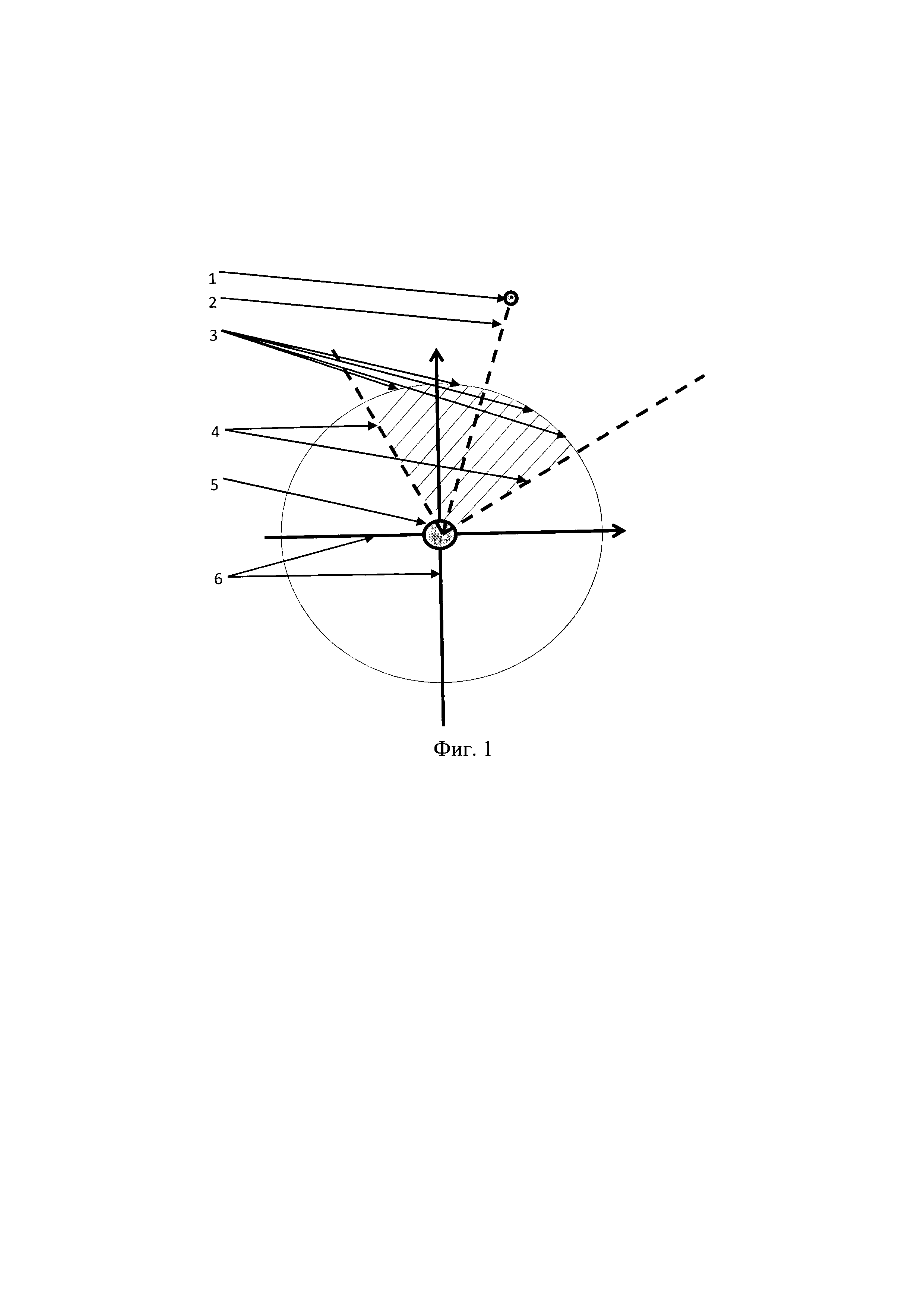
Сущность способа поясняется чертежом, где на фиг. 1 представлен возможный вариант ограничения множества стохастически выбираемых возможных направлений очередного маневра, обеспечивающих повышение вероятности успешного преодоления зон ответственности средств ПРО-ПВО, на которой:
1 - проекция цели полета на плоскость, перпендикулярную оси симметрии ВБЛА;
2 - проекция линии соединяющей центр масс ВБЛА с целью на плоскость, перпендикулярную оси симметрии ВБЛА;
3 - возможные проекции точек конца очередного маневра, удовлетворяющие требованиям к траекториям, обеспечивающим повышение вероятности успешного преодоления зон ответственности средств ПРО-ПВО на плоскость, перпендикулярную оси симметрии ВБЛА;
4 - границы области, в пределах которой возможен стохатический выбор направления очередного маневра;
5 - проекция ВБЛА на плоскость, перпендикулярную оси его симметрии;
6 - оси связанной системы координат.
Заявленный способ реализуется следующим образом.
При планировании траекторий ВБЛА в зоне, с размещенными средствами противодействия, на каждом рубеже маневрирования применяют классический КВРМ-подход к планированию траекторий, при этом, НОМ выбирают стохастически, в пределах множества возможных точек конца очередного маневра принадлежащих некоторой дуге данной окружности (содержащей все множество допустимых точек конца очередного маневра), ограниченной сектором данной окружности, с центральным углом в 90°, в котором проекция линии направления на цель, на плоскость, перпендикулярную плоскости симметрии ВБЛА содержит в себе биссектрису данного сектора, а параметры маневрирования (частота маневрирования и расстояние ухода ВБЛА выбирают не постоянными величинами, а варьируют по мере приближения к цели, оставляя их значения при этом, в области допустимых, исходя из требований, предъявляемым к КВРМ-траекториям.
Таким образом, реализация требования по выбору НОМ, обеспечивает существенное увеличение количества возможных не только точек, но и областей встречи УСП и ВБЛА, в которые могут быть направлены средства противодействия, а дополнительное требование по вариации параметров маневрирования (в пределах конструктивных и других ограничений на параметры маневрирования ВБЛА), обеспечивает невозможность прогнозируемости рубежей маневрирования, что исключает возможность противодействия ВБЛА средствами заграждения (формирование площадных «завес», например формирование облака осколков в некоторой области пространства), в результате чего, минимизируется вероятность поражения ВБЛА в зоне ответственности средств ПРО-ПВО и обеспечивается, успешное достижение цели полета во время пребывания ВБЛА внутри таких зон.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Гончаренко В.И., Горченко Л.Д. Выбор конфигурации маневра планирующего аэробаллистического летательного аппарата - Известия ЮФУ. Технические науки - Беспилотные авиационные системы - С. 6-13.
2. RU №2095737, 1997 г.
3. RU №2568161, 2015 г.
4. RU №2095737, 1997 г.
5. RU №2634659, 2017 г.
Способ построения траекторий высокоскоростных беспилотных летательных аппаратов в зоне размещения средств противодействия, обеспечивающих его непоражение, позволяющих успешно достигнуть цели полета, заключающийся в том, на каждом рубеже маневрирования учитывают необходимое и достаточное для достижения цели время начала очередного маневра и минимально допустимое расстояние ухода, отличающийся тем, что на каждом рубеже маневрирования направление очередного маневра выбирают стохастически, но в пределах множества возможных точек конца очередного маневра, принадлежащих дуге окружности, параметры которой выбирают с учетом необходимых и достаточных для успешного поражения цели времени и кривизны траектории маневра, ограниченной сектором, с центральным углом в 90°, в котором проекция линии направления на цель, на плоскость, перпендикулярную плоскости симметрии высокоскоростного беспилотного летательного аппарата содержит в себе биссектрису данного сектора, а параметры маневрирования - частота маневрирования и расстояние ухода высокоскоростного беспилотного летательного аппарата выбирают не постоянными величинами, а варьируют по мере приближения к цели, не выходя при этом за их предельные значения, обеспечивающие достижение цели полета.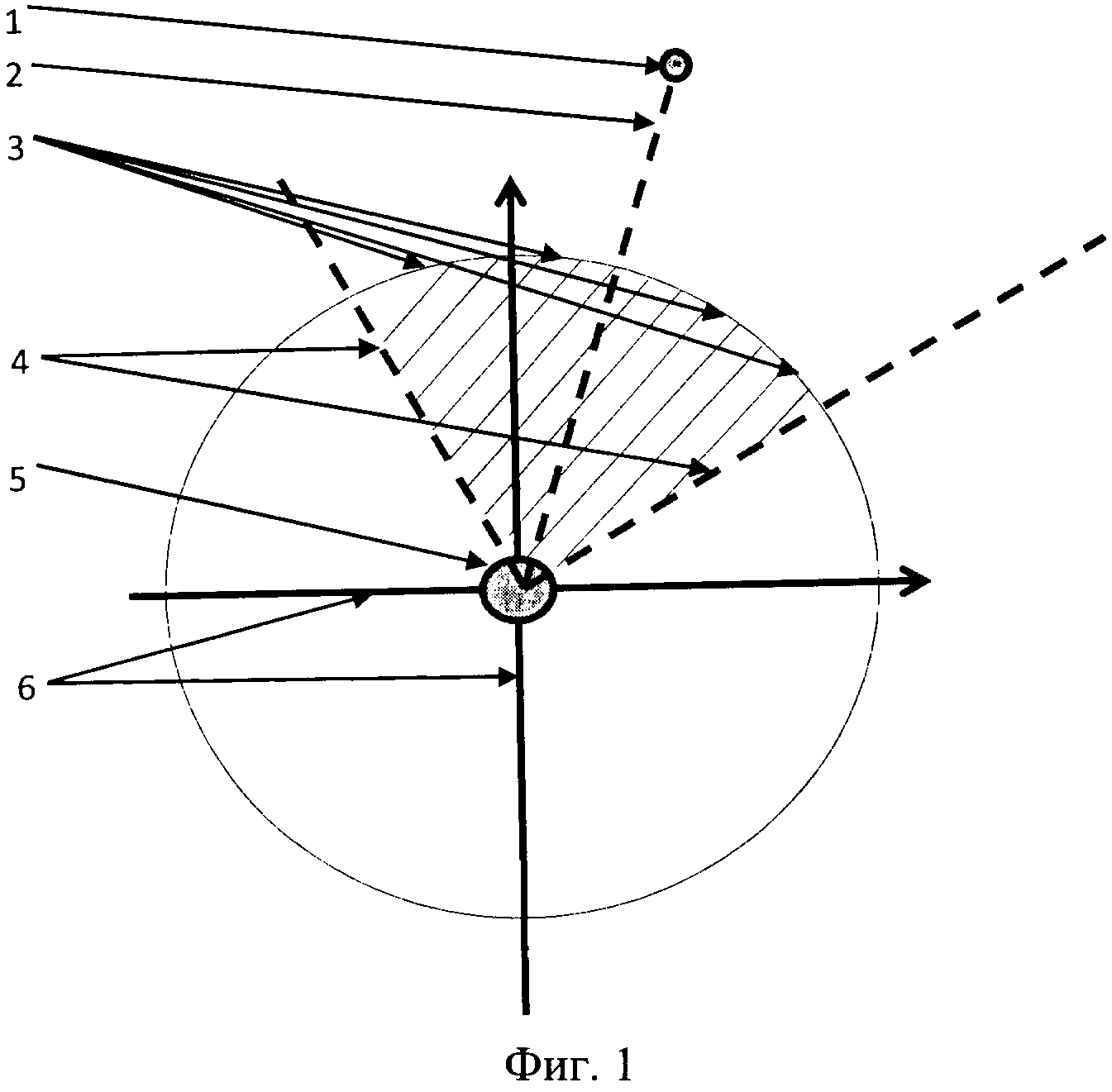
Система передачи информации с использованием радио- и оптико-электронных каналов
Устройство автоматического включения резерва
Энергонасыщенный взрывчатый материал
Удлиненный кумулятивный заряд
Устройство для перебора перестановок
Способ определения параметров динамического деформирования металлических материалов
Способ определения мощности ядерного взрыва
Космический телескоп для наблюдения звезд и земли с наиболее четким качеством изображения
Способ прогнозирования состояния группы подвижных объектов
Способ ситуационного анализа устойчивости технической системы с многоэтапным характером целевого применения
Планетарный редуктор
Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны
Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны
Кривошипно-кулисный механизм
Узел изменения степени сжатия объемного двигателя внутреннего сгорания
Поршневая машина
Способ сборки кулисного механизма
Способ сборки кулисного механизма
Способ сборки кулисного механизма
Винтовая передача и способ ее изготовления

