Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ И УСТРОЙСТВО КОРРЕКЦИИ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С СИСТЕМОЙ ПОМОЩИ ПРИ ВОЖДЕНИИ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к способу коррекции собственного местоположения и устройству коррекции собственного местоположения для транспортного средства с системой помощи при вождении.
Уровень техники
[0002] В предшествующем уровне техники известны способы коррекции собственного местоположения, в которых расстояние от рассматриваемого транспортного средства до дорожного указательного знака или другого объекта коррекции, присутствующего на маршруте движения, используется, когда местоположение рассматриваемого транспортного средства (собственное местоположение) на карте должно быть скорректировано (например, см. Патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: JP-A 2014-134469
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако в этих предыдущих способах коррекции собственного местоположения местоположение объекта коррекции идентифицируется на основе изображения, сфотографированного камерой, установленной в рассматриваемом транспортном средстве, и измеряется расстояние до объекта коррекции. Поэтому, когда объект коррекции не может быть сфотографирован надлежащим образом, возникает проблема в том, что коррекция собственного местоположения не может быть выполнена, и возможность коррекции теряется.
[0005] Настоящее изобретение было разработано с акцентом на проблему, описанную выше, поскольку целью изобретения является обеспечение способа коррекции собственного местоположения и устройства коррекции собственного местоположения для транспортного средства с системой помощи при вождении, которые увеличивают число возможностей для коррекции собственного местоположения на карте.
Средства, используемые для решения вышеперечисленных проблем
[0006] Для достижения цели, описанной выше, настоящее изобретение представляет собой способ коррекции собственного местоположения для транспортного средства с системой помощи при вождении, содержащего бортовой датчик, который получает информацию о периферии рассматриваемого транспортного средства, и контроллер, который выбирает полосу движения, в которой движется рассматриваемое транспортное средство, на основе информации, полученной бортовым датчиком, и картографической информации, и корректирует свое местоположение на карте. При управлении выбором полосы движения, в котором выбирается полоса движения, в которой движется рассматриваемое транспортное средство, сначала на основе картографической информации идентифицируется объект коррекции собственного местоположения на предполагаемом маршруте движения. Затем, когда рассматриваемое транспортное средство достигает точки коррекции, где присутствует идентифицированный объект коррекции собственного местоположения, выполняется определение, может ли объект коррекции собственного местоположения быть распознан бортовым датчиком из полосы движения, в которой рассматриваемое транспортное средство движется. Затем, когда определено, что объект коррекции собственного местоположения не может быть распознан из полосы движения, в которой движется рассматриваемое транспортное средство, смена полосы движения на полосу движения, в которой объект коррекции собственного местоположения может быть распознан, выполняется до того, как рассматриваемое транспортное средство достигает точки коррекции.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Следовательно, в настоящем изобретении количество возможностей для коррекции собственного местоположения на карте может быть увеличено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 - схема полной системной конфигурации системы коррекции собственного местоположения в соответствии с первым вариантом осуществления;
Фиг.2 - блок-схема последовательности операций процесса управления помощью для коррекции местоположения, выполняемого ЭБУ (ECU) управления транспортным средством согласно первому варианту осуществления;
Фиг.3 - блок-схема последовательности операций процесса управления коррекцией собственного местоположения, выполняемого ЭБУ управления транспортным средством согласно первому варианту осуществления;
Фиг.4 - блок-схема последовательности операций процесса управления выбором основной полосы движения, выполняемого ЭБУ управления транспортным средством в первом варианте осуществления;
Фиг.5 - блок-схема последовательности операций процесса подтверждения следования по целевому маршруту в рамках процесса управления выбором основной полосы движения;
Фиг.6 - блок-схема последовательности операций процесса подтверждения возврата из полосы движения для обгона в рамках процесса управления выбором основной полосы движения;
Фиг.7 - блок-схема последовательности операций процесса подтверждения обгона в рамках процесса управления выбором основной полосы движения;
Фиг.8 - схема ситуации движения транспортного средства до коррекции собственного местоположения;
Фиг.9 - пояснительная схема диапазона распознавания внешним датчиком, когда движение в центральной полосе движения продолжается;
Фиг.10 - пояснительная схема ситуации движения транспортного средства после смены полосы движения; и
Фиг. 11 - пояснительная схема диапазона распознавания внешним датчиком во время движения в крайней левой полосе движения.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления для осуществления способа и устройства коррекции собственного местоположения для транспортного средства с системой помощи при вождении по настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
[0010] [Первый вариант осуществления]
Сначала будет описана конфигурация. Способ коррекции собственного местоположения и устройство коррекции собственного местоположения в первом варианте осуществления применяются к транспортному средству с системой помощи при вождении, которое оборудовано системой коррекции собственного местоположения, которая корректирует местоположение рассматриваемого транспортного средства на карте во время движения транспортного средства и которое способно на автономное управление, при котором смена полосы движения выполняется автономно, чтобы следовать в целевой полосе движения. Описание конфигурации первого варианта осуществления ниже разделено на «Полную системную конфигурацию системы коррекции собственного местоположения», «Подробную конфигурацию блока управления выбором полосы движения», «Конфигурацию процесса управления помощью для коррекции местоположения», «Конфигурацию процесса управления коррекцией собственного местоположения», «Конфигурацию процесса управления выбором основной полосы движения».
[0011] [Полная системная конфигурация системы коррекции собственного местоположения]
Система 1 коррекции собственного местоположения первого варианта осуществления снабжена внешним датчиком 11, внутренним датчиком 12, GPS-приемником 13, базой 14 картографических данных и навигационной системой 15, как показано на фиг.1. Система дополнительно снабжена ЭБУ 20 управления транспортным средством, приводным исполнительным устройством 31 и исполнительным устройством 32 уведомления.
[0012] Внешний датчик 11 предусмотрен для рассматриваемого транспортного средства и является датчиком (бортовым датчиком) для получения информации о периферии рассматриваемого транспортного средства во время движения. Внешний датчик 11 по первому варианту осуществления представляет собой обычно используемую стереокамеру. Стереокамера, которая является внешним датчиком 11, имеет диапазон фотографирования (диапазон распознавания), способный на фотографирование все четыре белые линии, по две по большей мере с левой и правой стороны, центрированные относительно рассматриваемого транспортного средства. Информация о периферии рассматриваемого транспортного средства, полученная внешним датчиком 11, выводится в ЭБУ 20 управления транспортным средством и навигационную систему 15 через линию 10 связи CAN. Вместо стереокамеры внешним датчиком 11 может быть сонар дистанции (Clearance Sonar), использующий ультразвуковые волны, лазерный дальномер, использующий инфракрасный лазер и т.д.
[0013] Внутренний датчик 12 предусмотрен для рассматриваемого транспортного средства и является датчиком для определения состояния движения рассматриваемого транспортного средства. В этом варианте осуществления внутренний датчик 12 представляет собой датчик скорости транспортного средства, датчик угла поворота, датчик угла поворота рулевого колеса и т.д. Информация о рассматриваемом транспортном средстве, полученная внутренним датчиком 12, выводится в ЭБУ 20 управления транспортным средством и навигационную систему 15 по линии 10 связи CAN.
[0014] GPS-приемник 13 принимает сигналы от трех или более GPS-спутников, извлекает данные, необходимые для определения местоположения, основываясь на этих сигналах, и получает информацию GPS, указывающую местоположение рассматриваемого транспортного средства. Информация GPS, полученная GPS-приемником 13, выводится в ЭБУ 20 управления транспортным средством и навигационную систему 15 по линии 10 связи CAN.
[0015] База 14 картографических данных хранится в бортовой памяти (не показана) и представляет собой базу данных, снабженную картографической информацией, в которую записывается: информация о движении, такая как наклон и ограничение скорости, информация о периферии дороги, такая как знаки (дорожные), телефонные столбы и сооружения (туннели, мосты, пешеходные переходы и т. д.), и индикаторная информация, такая как белые линии и стоп-линии. К информации из базы 14 картографических данных обращаются из ЭБУ 20 управления транспортным средством и навигационной системы 15 по линии 10 связи CAN.
[0016] Навигационная система 15 оценивает местоположение рассматриваемого транспортного средства (собственное местоположение) на карте с использованием различных элементов информации, вводимых из внешнего датчика 11, внутреннего датчика 12, GPS-приемника 13 и базы 14 картографических данных. На основе информации об оцененном собственном местоположении, информации о пункте назначения, заданной на карте водителем рассматриваемого транспортного средства, и т.д. генерируется предполагаемый маршрут движения до пункта назначения. Кроме того, водителю предоставляются указания для сгенерированного предполагаемого маршрута движения. Информация о маршруте движения и информация о собственном местоположении, генерируемая навигационной системой 15, выводятся в ЭБУ 20 управления транспортным средством через линию 10 связи CAN.
[0017] ЭБУ 20 управления транспортным средством (контроллер) представляет собой встроенный контроллер, который использует различные элементы информации, вводимой из внешнего датчика 11, внутреннего датчика 12, GPS-приемника 13, базы 14 картографических данных, навигационной системы 15 и бортовой памяти (не показана) для вывода управляющей команды, заставляющей транспортное средство двигаться по предполагаемому маршруту движения. Управляющая команда, выводимая из ЭБУ 20 управления транспортным средством, вводится в приводное исполнительное устройство 31 или исполнительное устройство 32 уведомления по необходимости. ЭБУ 20 управления транспортным средством имеет блок 21 управления коррекцией собственного местоположения и блок 22 управления выбором полосы движения.
[0018] Используя различные элементы информации, введенные из внешнего датчика 11, внутреннего датчика 12, GPS-приемника 13, базы 14 картографических данных, навигационной системы 15 и бортовой памяти, блок 21 управления коррекцией собственного местоположения выполняет управление коррекцией собственного местоположения, при которой корректируется собственное местоположение, оцененное навигационной системой 15. При этом управлении коррекцией собственного местоположения выполняется определение, можно ли распознать объект коррекции собственного местоположения (например, белую линию, имеющую точку изменения кривизны) на основании изображения, сфотографированного внешним датчиком 11, который является стереокамерой. Когда объект коррекции собственного местоположения может быть распознан, объект коррекции собственного местоположения (первая белая линия), распознанный на основе изображения, сфотографированного внешним датчиком 11, и объект коррекции собственного местоположения (вторая белая линия), идентифицированный на основе базы 14 картографических данных, сопоставляют. Собственное местоположение на карте затем корректируется на основе информации об отклонении местоположения, полученной в результате этого сопоставления. Эта коррекция собственного местоположения выполняется с заданными интервалами (в этом варианте осуществления каждый раз, когда транспортное средство проходит некоторое расстояние). Однако, когда коррекция собственного местоположения не может быть выполнена, расстояния движения промежутков, в течение которых коррекция собственного местоположения не может быть выполнена, суммируются. Когда это совокупное расстояние превышает заданное значение, выполняется управление выбором полосы движения блоком 22 управления выбором полосы движения.
[0019] Блок 22 управления выбором полосы движения выполняет управление выбором основной полосы движения, которое выбирает основную полосу движения, в которой рассматриваемое транспортное средство движется основным образом, на основе различных элементов информации, вводимых из внешнего датчика 11 и внутреннего датчика 12, и информации о маршруте движения, введенной из навигационной системы 15. Блок 22 управления выбором полосы движения также выполняет управление выбором полосы движения, в котором объект коррекции собственного местоположения впереди по пути движения идентифицируется на основе картографической информации, полученной посредством обращения к базе 14 картографических данных, выполняется определение относительно того, требуется ли смена полосы движения для распознавания этого объекта коррекции собственного местоположения, и смена полосы движения выполняется при необходимости.
[0020] Приводное исполнительное устройство 31 содержит различные исполнительные устройства, которые приводят в действие педаль акселератора, тормоз и рулевое колесо, которые управляют транспортным средством на основании команды управления движением.
[0021] Исполнительное устройство 32 уведомления является исполнительным устройством, в которое вводится команда управления уведомлением, когда смена полосы движения выполняется автономно в соответствии с управлением выбора полосы движения, выполняемым блоком 22 управления выбором полосы движения, и которое уведомляет водителя, что смена полосы движения будет выполнена (то, что будет выполнена смена полосы движения, причина выполнения смены полосы движения и т.д.) на основе этой команды управления уведомлением. В этом варианте осуществления устройство уведомления представляет собой громкоговоритель, способный выводить любые звуки.
[0022] [Подробная конфигурация блока управления выбором полосы движения]
Блок 22 управления выбором полосы движения по первому варианту осуществления имеет блок 23 идентификации объекта коррекции, блок 24 определения распознавания объекта коррекции, блок 25 выбора полосы движения и блок 26 выбора основной полосы движения, как показано на фиг.1.
[0023] Блок 23 идентификации объекта коррекции обращается к базе 14 картографических данных и получает картографическую информацию. Информацию о маршруте движения также получают из навигационной системы 15. На основе картографической информации и информации о маршруте движения блок 23 идентификации объекта коррекции ищет объект коррекции собственного местоположения на предполагаемом маршруте движения и идентифицирует объект коррекции собственного местоположения, присутствующий в заданном диапазоне, на который рассматриваемое транспортное средство является ссылается. В этом варианте осуществления «объект коррекции собственного местоположения» означает объект, который должен использоваться в качестве стандарта измерения для величины отклонения местоположения, когда корректируется местоположение рассматриваемого транспортного средства на карте. Этот объект коррекции собственного местоположения представляет собой, например, белую линию, имеющую заданную точку изменения кривизны в пределах заданного диапазона, знак (дорожный) и т.д.
[0024] Когда рассматриваемое транспортное средство достигло точки коррекции, где присутствует объект коррекции собственного местоположения, идентифицированный блоком 23 идентификации объекта коррекции, блок 24 определения распознавания объекта коррекции определяет, может ли быть распознан объект коррекции собственного местоположения внешним датчиком 11 из полосы движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения). В частности, когда рассматриваемое транспортное средство достигло точки коррекции без выполнения смены полосы движения, выполняется определение, может ли объект коррекции собственного местоположения быть распознан на основании изображения, сфотографированного внешним датчиком 11. Блок 24 определения распознавания объекта коррекции выполняет определение, описанное выше, на основе диапазона фотографии (диапазона распознавания) внешнего датчика 11 и картографической информации. «Точка коррекции» означает область заданного диапазона, включая местоположение, в котором присутствует объект коррекции собственного местоположения.
[0025] Когда блок 24 определения распознавания объекта коррекции определил, что объект коррекции собственного местоположения не может быть распознан из текущей полосы движения, когда точка коррекции достигнута, блок 25 выбора полосы движения выводит команду управления движением, чтобы выполнить смену полосы движения на полосу движения, из которой может быть распознан объект коррекции собственного местоположения до того, как транспортное средство достигнет точки коррекции. Когда блок 24 определения распознавания объекта коррекции определил, что объект коррекции собственного местоположения может быть распознан из текущей полосы движения, когда точка коррекции достигнута, блок 25 выбора полосы движения выводит команду управления движением, чтобы поддерживать движение в полосе движения во время текущего движения. Эти команды управления движением вводятся в приводное исполнительное устройство 31. Кроме того, при выводе команды управления движением для смены полосы движения на полосу движения, из которой можно распознать объект коррекции собственного местоположения, блок 25 выбора полосы движения через устройство уведомления выводит команду управления уведомлением, чтобы уведомить водителя о том, что смена полосы движения будет выполнена. Эта команда управления уведомлением вводится в исполнительное устройство 32 уведомления.
[0026] Блок 26 выбора основной полосы движения выбирает полосу движения в которой двигаться на дороге, имеющей множество полос движения, и выдает команду управления движением для движения по выбранной полосе движения. Эта команда управления движением вводится в приводное исполнительное устройство 31.
[0027] В блоке 26 выбора основной полосы движения в этом варианте осуществления полоса, которая следует предполагаемому маршруту движения, полученному из навигационной системы 15, выбирается в качестве целевой полосы движения, и выводится команда управления движением для движения по этой целевой полосе движения. Например, когда рассматриваемое транспортное средство движется по средней полосе движения дороги с тремя полосами движения, и предполагаемый маршрут движения разветвляется налево, рассматриваемое транспортное средство должно двигаться по левой полосе движения до точки разветвления. В этом случае левая полоса движения выбирается в качестве целевой полосы движения, и выводится команда управления движением для выполнения смены полосы движения в этой целевой полосе движения (левая полоса движения).
[0028] В этом блоке 26 выбора основной полосы движения, когда рассматриваемое транспортное средство движется по скоростной полосе движения (полосе движения, выбранной для обгона переднего транспортного средства), полоса движения для движения, смежная с этой полосой движения для обгона, выбирается в качестве целевой полосы движения, и выводится команда управления движением для смены полос движения на эту целевую полосу движения (полосу движения для движения). Когда, например, понятно, что другое транспортное средство будет обгоняться во время движения по крайней левой полосе движения дороги с тремя полосами движения, полоса движения, в которой выполняется обгон, также является полосой движения для движения. Поэтому управление, которое восстановило бы полосу движения для движения в исходную полосу движения, не выполняется, и выводится команда управления движением для продолжения движения по текущей полосе движения в которой двигаться.
[0029] Кроме того, в этом блоке 26 выбора основной полосы движения в качестве целевой полосы движения выбирается полоса движения для обгона, когда следует обогнать другое транспортное средство впереди рассматриваемого транспортного средства, и выводится команда управления движением для смены полос движения на эту целевую полосу движения (полосу движения для обгона). Критерием определения, возможен ли обгон, является наличие правой полосы движения, смежной с полосой движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), и что другое транспортное средство, скорость которого относительно скорости рассматриваемого транспортного средства равна или меньше пороговой скорости, находится впереди в текущей полосе движения. В таких случаях правая полоса движения выбирается в качестве целевой полосы движения, и выводится команда управления движением для смены полос движения на эту целевую полосу движения (правую полосу движения).
[0030] [Конфигурация процесса управления помощью для коррекции местоположения]
Фиг.2 - блок-схема последовательности операций, показывающая последовательность операций процесса управления помощью для коррекции местоположения, выполняемого ЭБУ управления транспортным средством, по первому варианту осуществления. Процесс управления помощью для коррекции местоположения согласно первому варианту осуществления описан ниже на основе фиг.2.
[0031] На этапе S1 выполняется определение, превышает ли расстояние без коррекции собственного местоположения, которое записано в бортовой памяти, предварительно заданное пороговое расстояние D [км]. Когда определением является ДА (расстояние без коррекции собственного местоположения ˃ D [км]), процесс переходит на этап S2. Если определено НЕТ (расстояние без коррекции собственного местоположения ≤ D [км]), расстояния без коррекции собственного местоположения суммируются и записываются в бортовую память при условии, что любая ошибка в собственном местоположении на карте мала и коррекция собственного местоположения не требуется, время обновляется, после чего процесс переходит на этап S20.
На этом этапе «расстояние без коррекции собственного местоположения» означает расстояние, пройденное с момента выполнения самой последней коррекции собственного местоположения на карте, и рассчитывается в соответствии с формулой (1) ниже. Это «расстояние без коррекции собственного местоположения» продолжает сохраняться во время движения транспортного средства и сбрасывается при выполнении коррекции.
расстояние без коррекции собственного местоположения = расстояние без коррекции собственного местоположения + скорость транспортного средства × (текущее время - самое последнее время) (1)
Пороговое расстояние D [км] представляет собой расстояние, на котором определяется, что ошибка в оценке собственного местоположения, собственное местоположение, оцененное на основе скорости транспортного средства и скорости рыскания, превышает заданное значение и задается на основе эксперимента и т.д.
[0032] На этапе S2, в продолжение к определению на этапе S1 того, что расстояние без коррекции собственного местоположения больше, чем D [км], выполняется определение, исходя из того, что необходима коррекция собственного местоположения, имеется ли объект коррекции собственного местоположения, который может быть распознан внешним датчиком 11 даже во время, когда поддерживается движение в полосе движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущей полосе движения), в пределах заданного расстояния X [м] на предполагаемом маршруте движения впереди транспортного средства. Когда определением является ДА (имеется объект коррекции собственного местоположения), процесс переходит на этап S3. Когда определением является НЕТ (отсутствует объект коррекции собственного местоположения), процесс переходит на этап S4.
В этом варианте осуществления, имеется ли объект коррекции собственного местоположения, определяется на основе картографической информации, записанной в базу 14 картографических данных, и информации о маршруте движения рассматриваемого транспортного средства, полученной из навигационной системы 15. Кроме того, может ли быть распознан объект коррекции собственного местоположения при поддержании движения по текущей полосе движения, определяется на основе информации о собственном местоположении рассматриваемого транспортного средства, полученной из навигационной системы 15, и области распознавания внешнего датчика 11. «Заданное расстояние X [м]» означает расстояние, на котором состояние коррекции, которое не выполняется активно, может быть разрешено даже если расстояние без коррекции собственного местоположения превышает пороговое расстояние D [км], например, расстояние, равное половине пороговое расстояние D [км].
[0033] На этапе S3, в продолжение к определению на этапе S2, что имеется объект коррекции собственного местоположения, который может быть распознан при поддержании движения в текущей полосе движения в пределах заданного расстояния, команда управления движением для поддержания движения в полосе движения, в которой рассматриваемое транспортное средство в текущий момент движется (текущая полоса движения), выводится при условии, что, если движение в текущей полосе движения продолжается, объект коррекции собственного местоположения будет распознаваемым до тех пор, пока заданное расстояние X [м] впереди рассматриваемого транспортного средства не будет пройдено, и процесс переходит на этап S10. Таким образом, целевая полоса движения устанавливается на текущую полосу движения, и движение в текущей полосе движения продолжается.
[0034] На этапе S4, в продолжение к определению на этапе S2, что нет объекта коррекции собственного местоположения, который может быть распознан при поддержании движения в текущей полосе в пределах заданного расстояния, объект коррекции собственного местоположения, который находится на предполагаемом маршруте движения впереди рассматриваемого транспортного средства и присутствует в местоположении, ближайшем к рассматриваемому транспортному средству, идентифицируется, и процесс переходит на этап S5. В этом варианте осуществления объект коррекции собственного местоположения идентифицируется на основе картографической информации, записанной в базу 14 картографических данных, и информации о маршруте движения рассматриваемого транспортного средства, полученной из навигационной системы 15. Кроме того, диапазон, в котором ищется объект коррекции собственного местоположения в это время, является диапазоном всего маршрута от текущего местоположения рассматриваемого транспортного средства до пункта назначения.
[0035] На этапе S5, в продолжение к идентификации объекта коррекции собственного местоположения на этапе S4, выполняется определение, может ли объект коррекции собственного местоположения быть распознан из полосы движения, в которой рассматриваемое транспортное средство в текущий момент движется (текущая полоса движения), в момент времени, когда рассматриваемое транспортное средство достигает точки коррекции, где присутствует объект коррекции собственного местоположения, идентифицированный на этапе S4. Когда определением является ДА (распознавание возможно), процесс переходит на этап S6. Когда определением является НЕТ (распознавание невозможно), процесс переходит на этап S7. В этом варианте осуществления «точка коррекции» означает область заданного диапазона, включающую в себя местоположение, в котором присутствует объект коррекции собственного местоположения. Кроме того, определяется, является ли текущая полоса движения полосой движения, из которой может быть распознан объект коррекции собственного местоположения, на основании информации о собственном местоположении рассматриваемого транспортного средства, полученной из навигационной системы 15, и области, которая может быть распознана посредством внешнего датчика 11.
[0036] На этапе S6, в продолжение к определению на этапе S5, что объект коррекции собственного местоположения может быть распознан из текущей полосы движения в момент времени достижения точки коррекции, команда управления движением для поддержания движения по полосе движения (рассматриваемой полосе движения), в которой в текущий момент движется рассматриваемое транспортное средство, выводится при условии, что объект коррекции собственного местоположения может быть распознан, даже если движение в текущей полосе движения продолжается, и процесс переходит на этап S10. В частности, на этапе S6 определяется, что объект коррекции собственного местоположения является распознаваемым из текущей полосы движения из-за того, что рассматриваемое транспортное средство продолжает движение в текущей полосе движения даже после заданного расстояния X [м] впереди рассматриваемого транспортного средства, даже если нет объекта коррекции собственного местоположения, который может быть распознан, пока движение поддерживается в текущей полосе движения в пределах заданного расстояния X [м]. Таким образом, целевая полоса движения устанавливается на текущую полосу движения, и движение в текущей полосе движения продолжается.
[0037] На этапе S7, в продолжение к определению на этапе S5, что объект коррекции собственного местоположения не может быть распознан из текущей полосы в момент времени достижения точки коррекции, команда управления уведомлением выводится через устройство уведомления для уведомления водителя о том, что будет выполнена смена полосы движения на полосу движения (полосу движения для распознавания объекта коррекции), из которой может быть распознан объект коррекции собственного местоположения, при условии, что объект коррекции собственного местоположения не может быть распознан, если движение продолжается в текущей полосе движения независимо от того, находится ли объект коррекции собственного местоположения на предполагаемом маршруте движения, и процесс переходит на этап S8. В этом варианте осуществления, когда устройство уведомления представляет собой громкоговоритель, который выводит звуки, устройство уведомления использует звуки, чтобы уведомить водителя о том, что будет выполнена смена полосы движения, а также уведомить водителя о причине для этого.
[0038] На этапе S8, в продолжение к уведомлению о смене полосы на этапе S7, выводится команда управления движением, чтобы сменить полосы движения на полосу движения, из которой может быть распознан объект коррекции собственного местоположения (полосу движения для распознавания объекта коррекции), и процесс переходит на этап S10. Таким образом, целевая полоса движения устанавливается на полосу движения для распознавания объекта коррекции, и рассматриваемое транспортное средство меняет полосы движения. В этом варианте осуществления определение, может ли быть выполнена смена полосы движения, выполняется на основе информации о периферии рассматриваемого транспортного средства, полученной внешним датчиком 11, и информации о рассматриваемом транспортном средстве, полученной внутренним датчиком 12. Когда смена полосы движения не может быть выполнена в течение заданного периода времени из-за, среди прочего, влияния окружения, окружающего рассматриваемое транспортное средство, выполнение смены полосы движения останавливается, и процесс возвращается на этап S1.
[0039] На этапе S10, в продолжение к выводу либо команды управления движением с поддержанием текущей полосы движения на этапе S3 или этапе S6, либо команды управления движением со сменой полосы движения на этапе S8, выполняется процесс управления коррекцией собственного местоположения для коррекции местоположения рассматриваемого транспортного средства на карте, и процесс переходит на этап S20. Процесс управления коррекцией собственного местоположения на этапе S10 представляет собой процесс сопоставления информации о периферии рассматриваемого транспортного средства, полученной внешним датчиком 11, и информации о периферии рассматриваемого транспортного средства, полученной из базы 14 картографических данных, и коррекции собственного местоположения на карте на основании результата. Подробности этого процесса управления коррекцией собственного местоположения описаны ниже.
[0040] На этапе S20, в продолжение к выполнению процесса управления коррекцией собственного местоположения на этапе S10, выполняется процесс управления выбором основной полосы движения, состоящий в выборе полосы движения для движения после коррекции собственного местоположения, и процесс переходит в ВОЗВРАТ. В процессе управления выбором основной полосы движения на этапе S20 выбирается полоса, в которой следует двигаться, на основе трех положений: выбор полосы движения, необходимой для того, чтобы следовать по предполагаемому маршруту движения, выбор полосы движения для возврата из полосы движения для обгона в полосу движения для движения, и выбор полосы движения, необходимой для обгона переднего транспортного средства. Когда не определено, что смена полосы движения необходима для какого-либо из этих положений, поддерживается движение в полосе движения, занятой во время текущего движения, и ненужная смена полосы движения не выполняется. Подробности этого процесса управления выбором основной полосы движения описаны ниже.
[0041] Процесс от этапа S4 до этапа S8 в процессе управления помощью для коррекции местоположения, показанном на фиг.2, эквивалентен «управлению выбором полосы движения», в котором полоса движения, в которой движется рассматриваемое транспортное средство, выбирается на основе информации, полученной внешним датчиком 11, и картографической информации из базы 14 картографических данных. Другими словами, в этом процессе управления помощью для коррекции местоположения выполняется процесс управления коррекцией собственного местоположения, и собственное местоположение на карте корректируется после того, как было выполнено «управление выбором полосы движения».
[0042] [Конфигурация процесса управления коррекцией собственного местоположения]
Фиг.3 - блок-схема последовательности операций, показывающая последовательность операций процесса управления коррекцией собственного местоположения, выполняемого ЭБУ управления транспортным средством, по первому варианту осуществления. Процесс управления коррекцией собственного местоположения по первому варианту осуществления описан ниже со ссылкой на фиг.3.
[0043] На этапе S11 выполняется определение относительно того, достигло ли рассматриваемое транспортное средство точки коррекции. Когда определением является ДА (точка достигнута), процесс переходит на этап S12. Когда определением является НЕТ (точка не была достигнута), расстояния без коррекции собственного местоположения суммируются и записываются в бортовую память, время обновляется, и затем повторяется этап S11. В этом варианте осуществления, была ли достигнута точка коррекции, определяется на основе картографической информации, полученной из базы 14 картографических данных, и информации о собственном местоположении рассматриваемого транспортного средства, полученной из навигационной системы 15.
[0044] На этапе S12, в продолжение к определению на этапе S11 того, что точка коррекции достигнута, выполняется определение, был ли объект коррекции собственного местоположения распознан на основании информации датчика от внешнего датчика. 11. Когда определением является ДА (распознано), процесс переходит на этап S13. Когда определением является НЕТ (распознавание невозможно), процесс переходит на этап S17. В этом варианте осуществления, было ли возможно распознавание, определяется в соответствии с процедурой, описанной ниже, когда объектом коррекции собственного местоположения является, например, белая линия. В частности, во-первых, вид впереди транспортного средства фотографируется внешним датчиком 11, который является стереокамерой. Белая линия (объект коррекции собственного местоположения), присутствующая впереди транспортного средства, затем обнаруживается по полученной информации изображения. Затем на основе информации изображения измеряют кривизну множества точек, установленных на обнаруженной белой линии на основе информации изображения. Когда существует группа точек измерения, для которых разница в кривизне этих точек больше, чем заданное значение K, определяется, что объект коррекции собственного местоположения может быть распознан.
[0045] На этапе S13, в продолжение к определению на этапе S2 того, что объект коррекции собственного местоположения был распознан, первый объект коррекции собственного местоположения, распознанный на основе изображения, сфотографированного внешним датчиком 11, и второй объект коррекции собственного местоположения, идентифицированный на основе базы 14 картографических данных, сопоставляются, и процесс переходит на этап S14.
[0046] На этапе S14, в продолжение к выполнению сопоставления на этапе S13, выполняется определение относительно того, было или нет сопоставление успешным. Когда определением является ДА (сопоставление успешно), процесс переходит на этап S15. Когда определением является НЕТ (сопоставление не успешно), процесс переходит на этап S17. В этом варианте осуществления определение, было ли успешным сопоставление, определяется на основании того, попадает ли величина отклонения местоположения (величина отклонения между местоположением объекта коррекции собственного местоположения, полученным из информации изображения, и местоположением объекта коррекции собственного местоположения, полученным из картографической информации), полученная в результате сопоставления, в заданный диапазон. Величина отклонения местоположения может быть оценена в соответствии с расстоянием движения и временем движения, в течение которого коррекция местоположения не выполнялась. Поэтому, когда величина отклонения местоположения находится за пределами заданного диапазона, можно определить, что сопоставление не успешно.
[0047] На этапе S15, в продолжение к определению на этапе S14, что сопоставление не успешно, собственное местоположение корректируется так, чтобы величина отклонения местоположения была равна нулю, на основе информации об отклонении местоположения, полученной в результате сопоставления, и процесс переходит на этап S16. Новая информация о собственном местоположении после коррекции вводится в навигационную систему 15.
[0048] На этапе S16, в продолжение к коррекции для информации о собственном местоположении на этапе S15, расстояние без коррекции собственного местоположения переписывается как «ноль» и сохраняется в бортовой памяти, и процесс переходит на этап S18.
[0049] На этапе S17, в продолжение к определению на этапе S12, что объект коррекции собственного местоположения не может быть распознан, или определению на этапе S14, что сопоставление не успешно, исходя из того, что коррекция для информации о собственном местоположении не могла быть надлежащим образом выполнена, расстояния без коррекции собственного местоположения суммируются и записываются в бортовую память, время обновляется, и процесс переходит на этап S18. В этом варианте осуществления новое кумулятивное значение для расстояния без коррекции собственного местоположения вычисляется согласно приведенной выше формуле (1) и обновляется.
[0050] На этапе S18, в продолжение к установке на ноль расстояния без коррекции собственного местоположения на этапе S16, или обновления расстояния без коррекции собственного местоположения на этапе S17, время, записанное как самое последнее время, переписывается как текущее время и записывается в бортовую память, и процесс переходит в КОНЕЦ.
[0051] [Конфигурация процесса управления выбором основной полосы движения]
Фиг.4 - блок-схема последовательности операций, показывающая последовательность операций процесса управления выбором основной полосы движения, выполняемого ЭБУ управления транспортным средством, в первом варианте осуществления. Последовательность операций процесса управления выбором основной полосы движения, показанного на фиг.4, описана ниже.
[0052] На этапе S21 выполняется процесс подтверждения следования по целевому маршруту, и процесс переходит на этап S22. В этом варианте осуществления «процесс подтверждения следования по целевому маршруту» означает процесс подтверждения того, можно ли следовать по предполагаемому маршруту движения, установленному посредством базы 14 картографических данных, в то время как продолжается движение в полосе движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения). Флаг выбора полосы движения для следования по маршруту и полоса движения для следования по маршруту устанавливаются в соответствии с результатом этого подтверждения. Подробности этого процесса подтверждения следования по целевому маршруту описаны ниже.
[0053] На этапе S22, в продолжение к выполнению процесса подтверждения следования по целевому маршруту на этапе S21, определяется флаг выбора полосы движения для следования по маршруту, установленный в процессе подтверждения следования по целевому маршруту. Когда флаг выбора полосы движения для следования по маршруту имеет значение «истина», процесс переходит на этап S23. Когда флаг выбора полосы движения для следования по маршруту имеет значение «ложь», процесс переходит на этап S24.
[0054] На этапе S23, в продолжение к определению на этапе S22, что флаг выбора полосы движения для следования по маршруту имеет значение «истина», выводится команда управления движением, чтобы сменить полосы движения на полосу движения для следования по маршруту, и процесс переходит в КОНЕЦ. Таким образом, управление движением выполняется для рассматриваемого транспортного средства, так что целевая полоса движения сменяется на полосу движения для следования по маршруту, установленную в процессе подтверждения следования по целевому маршруту, и текущая полоса движения становится целевой полосой движения. В этом варианте осуществления «полоса движения для следования по маршруту» является полосой движения, выбранной для следования по предполагаемому маршруту движения.
[0055] На этапе S24, в продолжение к определению на этапе S22 того, что флаг выбора полосы движения для следования по маршруту имеет значение «ложь», выполняется процесс подтверждения возврата из полосы движения для обгона, и процесс переходит на этап S25. В этом варианте осуществления «процесс подтверждения возврата из полосы движения для обгона» означает процесс подтверждения того, следует ли возвращаться в полосу движения для движения, когда рассматриваемое транспортное средство движется в полосе движения для обгона. Флаг и полоса движения для возврата из полосы движения для обгона устанавливаются в соответствии с результатом этого подтверждения. Подробности процесса подтверждения возврата из полосы движения для обгона описаны ниже.
[0056] На этапе S25, в продолжение к выполнению процесса подтверждения возврата из полосы движения для обгона на этапе S24, флаг для возврата из полосы движения для обгона, который был установлен в процессе подтверждения возврата из полосы движения для обгона, установлен. Когда флаг для возврата из полосы движения для обгона имеет значение «истина», процесс переходит на этап S26. Когда флаг для возврата из полосы движения для обгона имеет значение «ложь», процесс переходит на этап S27.
[0057] На этапе S26, в продолжение к определению на этапе S25, что флаг для возврата из полосы движения для обгона имеет значение «истина», выводится команда управления движением для смены полос движения на возвратную полосу движения, и процесс переходит в КОНЕЦ. Таким образом, управление движением выполняется в рассматриваемом транспортном средстве, так что целевая полоса движения сменяется на возвратную полосу движения, установленную в процессе подтверждения возврата из полосы движения для обгона, и текущая полоса движения становится целевой полосой движения. В этом варианте осуществления «возвратная полоса движения» означает полосу движения, выбранную после обгона переднего транспортного средства.
[0058] На этапе S27, в продолжение к определению на этапе S25, что флаг для возврата из полосы движения для обгона имеет значение «ложь», выполняется процесс подтверждения обгона, и процесс переходит на этап S28. В этом варианте осуществления «процесс подтверждения обгона» означает процесс подтверждения того, будет ли обгон другого транспортного средства, движущегося впереди рассматриваемого транспортного средства. Флаг подтверждения обгона и полоса движения для обгона устанавливаются в соответствии с результатом подтверждения. Подробности этого процесса подтверждения обгона описаны ниже.
[0059] На этапе S28, в продолжение к выполнению процесса подтверждения обгона на этапе S27, определяется флаг выполнения обгона, установленный в процессе подтверждения обгона. Когда флаг выполнения обгона имеет значение «истина», процесс переходит на этап S29. Когда флаг выполнения обгона имеет значение «ложь», процесс переходит на этап S30.
[0060] На этапе S29, в продолжение к определению на этапе S28 того, что флаг выполнения обгона имеет значение «истина», выводится команда управления движением для смены полосы движения на полосу движения для обгона, и процесс переходит в КОНЕЦ. Таким образом, управление движением выполняется в рассматриваемом транспортном средстве, так что целевая полоса движения сменяется на полосу движения для обгона, установленную в процессе подтверждения обгона, и текущая полоса движения становится целевой полосой движения. В этом варианте осуществления «полоса движения для обгона» означает полосу движения, выбранную, когда необходимо обогнать другое транспортное средство, находящееся впереди рассматриваемого транспортного средства.
[0061] На этапе S30, в продолжение к определению на этапе S28, что флаг выполнения обгона имеет значение «ложь», выводится команда управления движением для поддержания движения по полосе движения, в которой в текущий момент движется рассматриваемое транспортное средство, и процесс переходит в КОНЕЦ. Благодаря этому действию полоса движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), устанавливается на целевую полосу движения, и движение в текущей полосе движения продолжается.
[0062] [Процесс следования по целевому маршруту]
Фиг.5 - блок-схема последовательности операций, показывающая последовательность операций процесса подтверждения следования по целевому маршруту в рамках процесса управления выбором основной полосы движения. Процесс следования по целевому маршруту по первому варианту осуществления описан ниже на основе фиг. 5.
[0063] На этапе S211 информацию о маршруте движения для рассматриваемого транспортного средства получают из навигационной системы 15, и процесс переходит на этап S212.
[0064] На этапе S212, в продолжение к получению информации о маршруте движения на этапе S211, выполняется определение, есть ли необходимость поворачивать направо или налево или двигаться по ответвлению влево или вправо в пределах диапазона до заданного расстояния Z [м] на предполагаемом маршруте движения впереди рассматриваемого транспортного средства. Когда определением является ДА (есть необходимость в повороте направо или налево и т.д.), процесс переходит на этап S213. Когда определением является «НЕТ» (нет необходимости в повороте направо или налево и т.д.), процесс переходит на этап S218, исходя из того, что по предполагаемому маршруту движения можно следовать без подтверждения полосы движения. В этом варианте осуществления «заданное расстояние Z [м]» может быть задано, как описано, и в этом варианте осуществления оно задано равным минимальному расстоянию, необходимому для того, чтобы рассматриваемое транспортное средство выполнило смену полосы движения.
[0065] На этапе S213, в продолжение к определению на этапе S212, что существует необходимость в повороте направо или налево, выполняется определение, что полоса движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), не продолжается в дорогу с поворотом направо/налево или дорогу с ответвлением влево/вправо. Когда определением является ДА (текущая полоса движения не продолжается в дорогу с поворотом направо/налево и т.д.), Процесс переходит на этап S214. Когда определением является «НЕТ» (текущая полоса движения продолжается в дорогу с поворотом направо/налево и т.д.), процесс переходит на этап S217.
[0066] На этапе S214, в продолжение к определению на этапе S213, что текущая полоса движения не продолжается в дорогу с поворотом направо/налево и т.д., выполняется определение, поворачивает ли направо или ответвляется ли вправо предполагаемый маршрут движения впереди рассматриваемого транспортного средства, исходя из того, что поворот направо или налево или ответвление влево или вправо не могут быть выполнены надлежащим образом, если движение продолжается в текущей полосе движения, и невозможно следовать по предполагаемому маршруту движения. Когда определением является ДА (поворот направо или ответвление вправо), процесс переходит на этап S215. Когда определением является НЕТ (поворот налево или ответвление влево), процесс переходит на этап S216.
[0067] На этапе S215, в продолжение к определению на этапе S214 того, что предполагаемый маршрут движения впереди рассматриваемого транспортного средства поворачивает направо или ответвляется вправо, флаг выбора полосы движения для следования по маршруту устанавливается в «истина», полоса движения для следования по маршруту устанавливается на правую полосу движения, и процесс переходит в КОНЕЦ. В этом варианте осуществления «правая полоса движения» означает крайнюю правую полосу движения на дороге, по которой движется рассматриваемое транспортное средство.
[0068] На этапе S216, в продолжение к определению на этапе S214 того, что предполагаемый маршрут впереди рассматриваемого транспортного средства поворачивает налево или ответвляется влево, флаг выбора полосы движения для следования по маршруту устанавливается в «истина», полоса движения для следования по маршруту устанавливается на левую полосу движения, и процесс переходит в КОНЕЦ. В этом варианте осуществления «левая полоса движения» означает крайнюю левую полосу движения на дороге, по которой движется рассматриваемое транспортное средство.
[0069] На этапе S217, в продолжение к определению на этапе S213, что текущая полоса движения продолжается в дорогу с поворотом направо/налево и т.д., исходя из того, что рассматриваемое транспортное средство может повернуть направо или налево или двигаться по ответвлению влево или вправо, продолжая при этом движение в текущей полосе движения, и можно следовать по предполагаемому маршруту движения, флаг выбора полосы движения для следования по маршруту устанавливается на значение «истина», полоса движения для следования по маршруту установлена на текущую полосу движения (полосу движения, в которой рассматриваемое транспортное средство в текущий момент движется), и процесс переходит в КОНЕЦ.
[0070] На этапе S218, в продолжение к определению на этапе S212 того, что нет необходимости в повороте направо или налево, при условии, что можно следовать по предполагаемому маршруту движения, поддерживая при этом движение в текущей полосе движения, флаг выбора полосы движения для следования по маршруту устанавливается на значение «ложь», и процесс переходит в КОНЕЦ. «Полоса движения для следования по маршруту» в это время не установлена.
[0071] [Процесс подтверждения возврата из полосы движения для обгона]
Фиг.6 - блок-схема последовательности операций, показывающая последовательность операций процесса подтверждения возврата из полосы движения для обгона в рамках процесса управления выбором основной полосы движения. Последовательность операций процесса подтверждения возврата из полосы движения для обгона, показанная на фиг. 6, описана ниже.
[0072] На этапе S241 выполняется определение, является ли полоса движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), полосой движения для обгона. Когда определением является ДА (полоса движения для обгона), процесс переходит на этап S242. Когда определением является НЕТ (полоса движения для движения), процесс переходит на этап S245, исходя из того, что возвращение с полосы движения для обгона не требуется. На этом этапе «полоса движения для обгона» означает полосу движения, расположенную дальше всего вправо, когда дорога, по которой движется рассматриваемое транспортное средство, включает в себя множество полос движения. «Полоса движения для движения» означает полосу движения, отличную от той, которая расположена дальше всего вправо, когда дорога, по которой движется рассматриваемое транспортное средство, включает в себя множество полос движения.
[0073] На этапе S242, в продолжение к определению на этапе S241 того, что текущая полоса движения является полосой движения для обгона, информацию о периферии рассматриваемого транспортного средства получают внешним датчиком 11, внутренним датчиком 12 и т.д., и процесс переходит на этап S243.
[0074] На этапе S243, в продолжение к получению информации о периферии на этапе S242, выполняется определение, завершен ли обгон транспортного средства, которое следует обогнать. Когда определением является ДА (обгон завершен), процесс переходит на этап S244. Когда определением является НЕТ (обгон не завершен), процесс переходит на этап S245.
[0075] На этапе S244, в продолжение к определению на этапе S243 того, что прохождение завершено, флаг для возврата из полосы движения для обгона устанавливается в значение «истина», возвратная полоса движения устанавливается на левую полосу движения, и процесс переходит к КОНЕЦ. В этом варианте осуществления «левая полоса движения» означает полосу движения, примыкающую к левой стороне полосы движения, в которой в текущий момент движется рассматриваемое транспортное средство (полоса движения для обгона).
[0076] На этапе S245, в продолжение к определению полосы движения для движения на этапе S241 или определению того, что обгон является неполным на этапе S243, флаг для возврата из полосы движения для обгона устанавливается на значение «ложь», и процесс переходит в КОНЕЦ, исходя из предположения, что движение в полосе движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), может быть поддерживаться. «Возвратная полоса движения» в это время не установлена.
[0077] [Процесс подтверждения обгона]
Фиг.7 - блок-схема последовательности операций, показывающая последовательность операций процесса подтверждения обгона в рамках процесса управления выбором основной полосы движения. Процесс подтверждения обгона по первому варианту осуществления описан ниже на основе фиг.7.
[0078] На этапе S271 выполняется определение, присутствует ли правая полоса движения рядом с правой стороной полосы движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения). Когда определением является ДА (есть правая полоса движения), процесс переходит на этап S272. Когда определением является НЕТ (правая полоса движения отсутствует), процесс переходит на этап S275, исходя из того, что действие обгона невозможно.
[0079] На этапе S272, в продолжение к определению на этапе S271, что существует правая полоса движения, информацию о периферии рассматриваемого транспортного средства получают внешним датчиком 11, внутренним датчиком 12 и т.д., и процесс переходит на этап S273.
[0080] На этапе S273, в продолжение к получению информации о периферии на этапе S272, выполняется определение, находится ли впереди в полосе движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения), другое транспортное средство, скорость которого относительно скорости рассматриваемого транспортного средства равна или меньше пороговой скорости. Когда определением является ДА (имеется другое транспортное средство, относительная скорость которого равна или меньше пороговой скорости), процесс переходит на этап S274. Когда определением является НЕТ (нет другого транспортного средства, относительная скорость которого равна или меньше пороговой скорости), процесс переходит на этап S275, исходя из того, что нет необходимости в действии обгона.
[0081] На этапе S274, в продолжение к определению на этапе S273, что существует другое транспортное средство, относительная скорость которого равна или меньше пороговой скорости, при условии, что другое транспортное средство впереди может быть обогнано, флаг выполнения обгона устанавливается на значение «истина», полоса движения для обгона устанавливается на правую полосу движения, и процесс переходит в КОНЕЦ. В этом варианте осуществления «правая полоса движения» означает полосу движения, примыкающую к правой стороне полосы движения, в которой в текущий момент движется рассматриваемое транспортное средство (текущая полоса движения).
[0082] На этапе S275, в продолжение к определению на этапе S271, что нет правой полосы движения, или определению на этапе S273, что нет другого транспортного средства, относительная скорость которого равна или меньше пороговой скорости, флаг выполнения обгона устанавливается на значение «ложь», и процесс переходит в КОНЕЦ при условии, что обгон не будет выполняться. «Полоса движения для обгона» в это время не установлена.
[0083] Далее будут описаны действия. Сначала будут описаны необходимость коррекции собственного местоположения на карте и связанные с этим проблемы, а затем будут описаны действия способа и устройства коррекции собственного местоположения для транспортного средства с системой помощи при вождении, причем это описание разделено на «действие выбора полосы движения» и «другие характерные действия».
[0084] [Необходимость коррекции собственного местоположения на карте и связанные с этим проблемы]
Для надлежащего управления транспортным средством с системой помощи при вождении, таким как транспортное средство, для которого может быть предоставлено ведение по маршруту, используя навигационную систему, или транспортное средство с автономным управлением, в котором педаль акселератора, тормоз, рулевое колесо и т.д. автономно управляются, чтобы обеспечить возможность автономного управления, очень важно точно выяснить местоположение транспортного средства на карте (собственное местоположение).
[0085] Одним из примеров технологии для выяснения собственного местоположения является глобальная навигационная спутниковая система (GNSS), которая использует спутники, такие как спутники глобальной системы определения местоположения (GPS). Не смотря на то, что в GNSS ошибка минимизируется путем приема множества сигналов, генерируемых спутниками, но трудно постоянно принимать сигналы надлежащим образом, и связанная с этим точность недостаточна.
[0086] Ввиду этого существует известная технология, в которой результат распознавания для объекта коррекции собственного местоположения (белая линия, имеющая точку изменения кривизны, знак и т.д.), полученного из стереокамеры или другого бортового датчика, и объект коррекции собственного местоположения в заранее сохраненных картографических данных сопоставляются, и собственное местоположение на карте корректируется. В частности, это способ, в котором, например, когда рассматриваемое транспортное средство движется по кривой, фактическое местоположение движения, вычисленное из фактического собственного местоположения, в котором фактически движется рассматриваемое транспортное средство, и гипотетическое местоположение движения, вычисленное из оцененного собственного местоположения, сравниваются, и из величины отклонения между ними корректируется оцененное собственное местоположение.
[0087] В этом случае, когда объект коррекции собственного местоположения может быть надлежащим образом распознан в случаях, таких как, когда белая линия, распознанная бортовым датчиком, искривляется, и имеется точка изменения кривизны, или может быть распознан знак, коррекция собственного местоположения может быть выполнена, потому что сопоставление с картографическими данными может быть однозначно зафиксировано. Однако, когда объект коррекции собственного местоположения не может быть надлежащим образом распознан в случаях, например, когда белая линия, распознанная бортовым датчиком, является прямой линией без точки изменения кривизны, или знак не может быть распознан, возникает проблема в том, что картографические данные и объект коррекции собственного местоположения не могут быть сопоставлены, и коррекция собственного местоположения не может быть выполнена.
[0088] Объекты коррекции собственного местоположения распознаются бортовым датчиком, установленным в рассматриваемом транспортном средстве, но существует предел диапазона распознавания этого бортового датчика. Поэтому, даже если, например, имеется объект коррекции собственного местоположения в местоположении, находящемся вблизи рассматриваемого транспортного средства, когда этот объект находится за пределами диапазона распознавания бортового датчика, объект коррекции собственного местоположения не может быть надлежащим образом распознан. В результате возникает проблема в том, что коррекция местоположения рассматриваемого транспортного средства не может быть выполнена, и возможность коррекции пропадает.
[0089] Такая коррекция собственного местоположения должна выполняться регулярно. В частности, когда коррекция местоположения путем сопоставления между картографическими данными и объектом коррекции собственного местоположения, распознанным датчиком, таким как описанный выше, невозможна, собственное местоположение оценивается (счисление пути) с использованием скорости транспортного средства или скорости рыскания, обнаруженной бортовым датчиком, но будет ошибка измерения в значении, обнаруженном бортовым датчиком. Поэтому, в счислении пути происходит отклонение местоположения из-за ошибки измерения. Это связано с тем, что по мере того, как продолжается счисление пути, накапливается отклонение (ошибка) между фактическим местоположением транспортного средства и картографическими данными, и отклонение от точного местоположения увеличивается.
[0090] Таким образом, для точного выяснения местоположения рассматриваемого транспортного средства на карте необходимы периодические коррекции собственного местоположения, но, если объект коррекции собственного местоположения не может быть надлежащим образом распознан, процесс управления коррекцией собственного местоположения не может быть выполнен. Кроме того, существует предел диапазона распознавания бортового датчика, и когда объект коррекции собственного местоположения находится за пределами диапазона распознавания бортового датчика, существует проблема в том, что объект не может быть распознан надлежащим образом, и возможность коррекции пропадает.
[0091] [Действие выбора полосы движения]
Фиг.8 - схема ситуации движения транспортного средства до коррекции собственного местоположения, Фиг.9 - схема диапазона распознавания внешним датчиком, когда движение в центральной полосе движения продолжается, фиг.10 - схема ситуации движения транспортного средства после смены полосы движения, и фиг. 11 - схема диапазона распознавания внешним датчиком во время движения в крайней левой полосе движения. Действие выбора полосы движения по первому варианту осуществления будет описано ниже с использованием фиг. 8-11.
[0092] Как показано на фиг. 8, рассматривается случай, в котором транспортное средство с системой помощи при вождении (называемое ниже «рассматриваемым транспортным средством S»), способное на автономное управление, для которого применяется способ коррекции собственного местоположения по первому варианту осуществления, движется в центральной полосе r2 движения дороги R с тремя полосами движения с каждой стороны. В это время местоположение рассматриваемого транспортного средства S на карте задается относительно белых линий L1 на основе картографической информации в базе 14 картографических данных.
[0093] Как показано на фиг.8, в качестве ситуации, в которой рассматриваемое транспортное средство движется в центральной полосе r2 движения дороги R с тремя полосами движения с каждой стороны, например, в то же время имея присоединение к этой дороге R с левой стороны и двигаясь в крайней левой полосе r1 движения, рассматриваемое транспортное средство выполняет смену полосы движения на центральную полосу r2 движения, чтобы обогнать находящееся впереди тихоходное транспортное средство. В рассматриваемой ситуации предполагаемый маршрут движения после этого следует по дороге, и, следовательно, рассматриваемое транспортное средство продолжает движение в центральной полосе r2 движения, без выполнения смены полосы движения обратно на исходную полосу движения (крайнюю левую полосу r1 движения), чтобы избежать ненужных смен полосы движения.
[0094] Когда расстояние без коррекции собственного местоположения, которое является расстоянием, пройденным после самой последней коррекции собственного местоположения, превышает пороговое расстояние D [км], в то время как рассматриваемое транспортное средство S, таким образом, движется в центральной полосе r2 движения, процесс переходит от этапа S1 на этап S2, показано на фиг.2. Выполняется определение, присутствует ли объект коррекции собственного местоположения, который может быть распознан даже если движение поддерживается в центральной полосе r2 движения, которая является текущей полосой движения, в которой в текущий момент движется рассматриваемое транспортное средство S, в пределах диапазона, продолжающегося до заданного расстояния X [м] на предполагаемом маршруте движения впереди рассматриваемого транспортного средства S.
[0095] В этом варианте осуществления «объект коррекции собственного местоположения» представляет собой белую линию L2, имеющую точку изменения кривизны в случае, показанном на фиг.8. В случае прямой белой линии, отклонение местоположения в боковом направлении транспортного средства может быть скорректировано, но отклонение местоположения в продольном направлении транспортного средства не может быть скорректировано, и поэтому прямая белая линия не может быть объектом коррекции собственного местоположения. В рассматриваемом транспортном средстве S существует предел диапазона N, который может быть распознан внешним датчиком 11, и этот диапазон распознавания N представляет собой диапазон, обведенный одной пунктирной линией (диапазон, в котором могут быть сфотографированы всего четыре белых линии, максимум по две слева и справа от рассматриваемого транспортного средства S в центре) на фиг. 8. Поэтому, в состоянии, показанном на фиг.8, объект коррекции собственного местоположения (белая линия L2) не может быть распознан из центральной полосы r2 движения, которая является текущей полосой движения, и определяется, что в пределах диапазона, продолжающегося до заданного расстоянии X [м] на предполагаемом маршруте движения впереди рассматриваемого транспортного средства S, отсутствует объект коррекции собственного местоположения (белая линия L2), который может быть распознан даже если поддерживается движение в текущей полосе движения (центральной полосе r2 движения). Тем не менее, на самом деле на предполагаемом маршруте движения есть объект коррекции собственного местоположения (белая линия L2).
[0096] Ввиду этого процесс переходит от этапа S2 на этап S4, на этап S5, идентифицируется объект коррекции собственного местоположения (белая линия L2) на предполагаемом маршруте движения, и в момент времени, когда достигается точка P коррекция, выполняется определение, может ли быть распознан объект коррекции собственного местоположения (белая линия L2) из текущей полосы движения (центральной полосы r2 движения).
[0097] Однако в случае, когда движение в центральной полосе r2 движения продолжается, даже когда рассматриваемое транспортное средство S достигло точки P коррекции, как показано на фиг.9, объект коррекции собственного местоположения (белая линия L2) находится вне диапазона распознавания N внешнего датчика 11 и не может быть распознан. Поэтому, процесс переходит с этапа S5 на этап S7 на этап S8. Таким образом, выводится команда управления уведомлением, и когда водитель получает уведомление о том, что будет выполнена смена полосы движения на полосу движения (крайнюю левую полосу r1 движения в случае на фиг. 8), из которой объект коррекции собственного местоположения (белая линия L2) может быть распознан, выводится команда управления движением для выполнения смены полосы движения на полосу движения (крайнюю левую полосу r1 движения), из которой объект коррекции собственного местоположения (белая линия L2) может быть распознан до того, как будет достигнута точка P коррекции.
[0098] В результате команда управления движением вводится в приводное исполнительное устройство 31, которое приводит в действие педаль акселератора, тормоз и рулевое колесо, педалью акселератора и т.д. управляют автономно, и как показано на фиг.10, выполняется смена полосы движения на крайнюю левую полосу r1 движения до достижения точки P коррекции. Когда рассматриваемое транспортное средство S достигло точки P коррекции, как показано на фиг. 11, тем самым возможно включение объекта коррекции собственного местоположения (белой линии L2) в диапазон распознавания N внешнего датчика 11, и объект коррекции собственного местоположения (белая линия L2) может быть надлежащим образом распознан.
[0099] Затем выполняется процесс управления коррекцией собственного местоположения на этапе S10. В частности, в блок-схеме последовательности операций, показанной на фиг.3, на этапе S11 выполняется определение, достигло ли рассматриваемое транспортное средство S точки P коррекции. Как показано на фигуре 11, процесс переходит на этап S12, если точка P коррекции была достигнута, выполняется определение, был ли распознан объект коррекции собственного местоположения (белая линия L2), и, если это так, процесс переходит на этап S13.
[0100] Белая линия L2 (первый объект коррекции собственного местоположения), основанная на картографической информации, показанная сплошными линиями на фиг.11, и белая линия L3 (второй объект коррекции собственного местоположения), основанная на информации изображения, сфотографированной внешним датчиком 11 и показанная пунктирными линиями на фиг. 11, затем сопоставляются. Если сопоставление прошло успешно, процесс переходит от этапа S14 на этап S15, и на основе величины ∆W отклонения местоположения местоположение главного транспортного средства S на карте корректируется так, чтобы величина ∆W отклонения местоположения была равна нулю. Следовательно, местоположение рассматриваемого транспортного средства S на карте может быть соответствующим образом скорректировано.
[0101] Затем процесс переходит от этапа S16 на этап S18, расстояние без коррекции собственного местоположения устанавливается равным нулю, самое последнее время коррекции обновляется до текущего времени, и выполняется процесс управления выбором основной полосы движения. Затем движение продолжается в выбранной надлежащей полосе движения, тогда как случаи ненужных смен полосы движения минимизируются в соответствии с, в числе прочего, информацией об окружении на периферии транспортного средства после коррекции местоположения, предполагаемым маршрутом движения и скоростями движения передних транспортных средств.
[0102] Таким образом, в первом варианте осуществления имеется объект коррекции собственного местоположения (белая линия L2) перед траекторией движения рассматриваемого транспортного средства S, но когда движение в текущей полосе движения (центральной полосе r2 движения) продолжается и этот объект коррекции собственного местоположения (белая линия L2) находится за пределами диапазона распознавания N внешнего датчика 11, смена полосы движения выполняется на полосу движения (крайнюю левую полосу r1 движения), из которой объект коррекции собственного местоположения (белая линия L2) может быть распознан до достижения точки P коррекции. После этого, когда объект коррекции собственного местоположения (белая линия L2) успешно распознан, корректируется местоположение рассматриваемого транспортного средства S на карте. Другими словами, даже когда объект коррекции собственного местоположения (белая линия L2) не может быть распознан из текущей полосы движения (центральной полосы r2 движения), рассматриваемое транспортное средство активно перемещается в полосу движения (самую левую полосу r1 движения), в которой собственное местоположение может быть скорректировано, в результате чего становится возможной коррекция местоположения рассматриваемого транспортного средства S и могут быть увеличены возможности для коррекции собственного местоположения.
[0103] В первом варианте осуществления, когда расстояние без коррекции собственного местоположения превышает предварительно заданное пороговое расстояние D [км], выполняется управление выбором полосы движения для движения (процесс от этапа S4 до этапа S8, показанный на фиг.2). Другими словами, это управление выбором полосы движения для движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) выполняется, когда невозможно выполнить коррекцию местоположения рассматриваемого транспортного средства S на карте в пределах предварительно заданного предписанного интервала (каждый раз, когда преодолевается пороговое расстояние D [км]).
[0104] Из-за этой конфигурации смена полосы движения для включения объекта коррекции собственного местоположения в диапазон распознавания N внешнего датчика 11 не выполняется, когда местоположение рассматриваемого транспортного средства S может быть скорректировано в надлежащем интервале, и выполняется, когда определяется, что ошибка в оценке местоположения рассматриваемого транспортного средства S, которая оценивается на основе скорости транспортного средства и скорости рыскания, превышает заданное значение. Поэтому возможности для коррекции собственного местоположения могут быть увеличены, в то время как случаи ненужных смен полосы движения сведены к минимуму.
[0105] [Другие характерные действия]
В первом варианте осуществления, когда в пределах диапазона, продолжающегося до заданного расстояния X [m] на предполагаемом маршруте движения впереди рассматриваемого транспортного средства S, имеется объект коррекции собственного местоположения (белая линия L2), который может быть распознан при поддержании движения в текущей полосе движения (центральной полосе r2 движения), в блок-схеме последовательности операций, показанной на фиг.2, процесс переходит от этапа S2 на этап S3. В частности, управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) выполняется, когда в пределах диапазона, продолжающегося до заданного расстояния X [m] на предполагаемом маршруте движения впереди рассматриваемого транспортного средства S, нет объекта коррекции собственного местоположения (белая линия L2), который может быть распознан при поддержании движения в текущей полосе движения (центральной полосе r2 движения).
[0106] Из-за этой конфигурации, когда понятно, что в пределах диапазона, продолжающегося до заданного расстояния X [ m] впереди рассматриваемого транспортного средства S, имеется объект коррекции собственного местоположения (белая линия L2), который может быть распознан при поддержании движения в текущей полосе движения (центральная полоса r2 движения), управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) не выполняется, выполнение смены полосы движения сдержано, и продолжается перемещение в текущей полосе движения (центральной полосе r2 движения). Поэтому, даже когда объект коррекции собственного местоположения, который может быть распознан, если выполняется смена полосы движения, присутствует в пределах заданного расстояния X [m] от местоположения рассматриваемого транспортного средства, смены полосы движения для распознавания объекта коррекции собственного местоположения сдержаны, и частота появления смены полосы движения может быть сведена к минимуму.
[0107] Кроме того, могут быть сдержаны смены полосы движения для обгона и т.д., и может быть предотвращено снижение возможностей коррекции. Другими словами, в случаях, когда смена полосы движения была выполнена вместе с обгоном и т.д., независимо от того, что, например, в пределах заданного расстояния X [m] впереди рассматриваемого транспортного средства S, имеется объект коррекции собственного местоположения, который может быть распознан из текущей полосы движения, текущая полоса движения сменяется из-за смены полосы движения для этого обгона, и в результате объект коррекции собственного местоположения иногда перестает быть распознаваемым. В таком случае может потребоваться смена полосы движения для распознавания объекта коррекции собственного местоположения. В зависимости от местоположения объекта коррекции собственного местоположения, смена полосы движения для распознавания объекта коррекции собственного местоположения может не выполняться вовремя, и возможность коррекции может быть упущена.
[0108] В отличие от этого, когда в пределах заданного расстояния X [m] впереди рассматриваемого транспортного средства S имеется объект коррекции собственного местоположения, который может быть распознан при поддержании движения в текущей полосе движения (центральной полосе r2 движения), выполнение смены полосы движения сдержано, в результате чего объект коррекции собственного местоположения может быть надлежащим образом распознан без выполнения смены полосы движения. Благодаря этой конфигурации можно надежно выполнять коррекцию местоположения S рассматриваемого транспортного средства, в то время как случаи ненужных смен полосы движения сводятся к минимуму и можно предотвратить уменьшение возможностей коррекции.
[0109] Кроме того, в первом варианте осуществления, когда смена полосы движения выполняется для распознавания объекта коррекции собственного местоположения, как показано на фиг.2, команда управления уведомлением выводится до того, как выполнена смена полосы движения, и водителя уведомляют о том, что будет выполнена смена полосы движения на полосу движения, в которой можно распознать объект коррекции собственного местоположения.
[0110] Следовательно, даже когда смена полосы движения на полосу движения, в которой движется рассматриваемое транспортное средство S, выполняется автономно, водитель может выяснить причину смены полосы движения, и беспокойство водителя может быть устранено.
[0111] Далее будут описаны эффекты. Эффекты, представленные ниже, достигаются с помощью способа коррекции собственного местоположения и устройства коррекции собственного местоположения для транспортного средства с системой помощи при вождении по первому варианту осуществления.
[0112] (1) Способ коррекции собственного местоположения для транспортного средства с системой помощи при вождении, содержащего бортовой датчик (внешний датчик 11), который получает информацию о периферии рассматриваемого транспортного средства S, и контроллер (ЭБУ 20 управления транспортным средством), который выбирает полосу движения, в которой движется рассматриваемое транспортное средство S, на основе информации, полученной бортовым датчиком (внешним датчиком 11), и картографической информации, и корректирует собственное местоположение на карте, при этом:
идентифицируют объект коррекции собственного местоположения (белую линию L2) на предполагаемом маршруте движения на основе картографической информации (этап S4) во время управления выбором полосы движения, в котором выбирается полоса движения, в которой движется рассматриваемое транспортное средство S (этап S4-этап S8) ); определяют, может ли объект коррекции собственного местоположения (белая линия L2) быть распознан бортовым датчиком (внешним датчиком 11) из полосы движения (центральной полосы r2 движения), в которой движется рассматриваемое транспортное средство S, когда рассматриваемое транспортное средство S достигает точки P коррекции, в которой присутствует идентифицированный объект коррекции собственного местоположения (белая линия L2) (этап S5); и выполняют смену полосы движения на полосу движения (крайнюю левую полосу r1 движения), где объект коррекции собственного местоположения (белая линия L2) может быть распознан, до того, как рассматриваемое транспортное средство S достигает точки P коррекции (этап S8) после определения того, что объект коррекции собственного местоположения (белая линия L2) не может быть распознан в полосе движения (центральной полосе r2 движения), в которой движется рассматриваемое транспортное средство S.
Вследствие этой конфигурации рассматриваемое транспортное средство S может активно перемещаться в местоположение (крайнюю левую полосу r1 движения), где может быть распознан объект коррекции собственного местоположения (белая линия L2), и количество возможностей для коррекции собственного местоположения не карте можно увеличить.
[0113] (2) Управление выбором полосы движения (этап S4-этап S8) выполняется, когда коррекция собственного местоположения на карте не может быть выполнена в заданном интервале (пороговое расстояние D [км]), который был установлен заранее (этап S1). В дополнение к эффекту (1), таким образом, возможно увеличить количество возможностей для коррекции собственного местоположения при минимизации случаев ненужных смен полосы движения.
[0114] (3) Управление выбором полосы движения (этап S4-этап S8) выполняется, когда объект коррекции собственного местоположения (белая линия L2), который может быть распознан, отсутствует на заданном расстоянии X [m] впереди рассматриваемого транспортного средства S, даже если поддерживается движение рассматриваемого транспортного средства S в полосе движения, в которой в текущий момент оно движется (центральная полоса r2 движения) (этап S2). В дополнение к эффекту (1) или (2), таким образом, возможно увеличить количество возможностей для коррекции собственного местоположения при минимизации случаев ненужных смен полосы движения.
[0115] (4) Контроллер (ЭБУ 20 управления транспортным средством) автономно выполняет смену полосы движения, в которой движется рассматриваемое транспортное средство S, и при выполнении смены полосы движения на полосу движения, в которой объект коррекции собственного местоположения (белая линия L2) может быть распознан, водителя уведомляют о том, что будет выполнена смена полосы движения (этап S7). В дополнение к любому из эффектов (1)-(3), таким образом, возможно уменьшить дискомфорт водителя при автономно выполненной смене полосы движения.
[0116] (5) Устройство для коррекции собственного местоположения транспортного средства с системой помощи при вождении, содержащее бортовой датчик (внешний датчик 11), который получает информацию о периферии рассматриваемого транспортного средства S, и контроллер (ЭБУ 20 управления транспортным средством), который выбирает полосу движения, в которой движется рассматриваемое транспортное средство S, на основе информации, полученной бортовым датчиком (внешним датчиком 11), и картографической информации, и корректирует собственное местоположение на карте, при этом контроллер (ЭБУ 20 управления транспортным средством) содержит:
блок 23 идентификации объекта коррекции, который идентифицирует объект коррекции собственного местоположения (белую линию L2) на предполагаемом маршруте движения на основе картографической информации;
блок 24 определения распознавания объекта коррекции, который определяет, может ли объект коррекции собственного местоположения (белая линия L2), идентифицированный блоком 23 идентификации объекта коррекции, быть распознан бортовым датчиком (внешним датчиком 11) из полосы движения, в которой рассматриваемое транспортное средство S движется (центральной полосы r2 движения), когда рассматриваемое транспортное средство S достигает точки P коррекции, где присутствует объект коррекции собственного местоположения (белая линия L2); и
блок 25 выбора полосы движения, который, когда блок 24 определения распознавания объекта коррекции определил, что объект коррекции собственного местоположения (белая линия L2) не может быть распознан из полосы движения, в которой движется рассматриваемое транспортное средство S (центральной полосы r2 движения), меняет полосы движения до того, как рассматриваемое транспортное средство S достигнет точки P коррекции, на полосу движения (крайнюю левую полосу r1), где может быть распознан объект коррекции собственного местоположения (белая линия L2).
Вследствие этой конфигурации рассматриваемое транспортное средство S может активно перемещаться в местоположение (крайнюю левую полосу r1 движения), где может быть распознан объект коррекции собственного местоположения (белая линия L2), и количество возможностей для коррекции собственного местоположения не карте может быть увеличено.
[0117] Способ коррекции собственного местоположения и устройство коррекции собственного местоположения для транспортного средства с системой помощи при вождении по настоящему изобретению были описаны выше на основе первого варианта осуществления, но этот пример не приведен в качестве ограничения конкретной конфигурацией, модификации, дополнения и другие изменения в конструкции допускаются при условии, что они не отклоняются от объема изобретения, как в формуле изобретения.
[0118] В первом варианте осуществления был представлен пример, в котором, когда определено, что объект коррекции собственного местоположения не может быть распознан, если движение в текущей полосе движения будет продолжаться, выводится команда управления движением для смены полос движения на полосу движения, где объект коррекции собственного местоположения может быть распознан, и педалью акселератора и т.д. автономно управляют для смены полосы движения. Другими словами, в первом варианте осуществления был представлен пример, в котором «транспортное средство с системой помощи при вождении» означает транспортное средство с автономным управлением, которое автономно выполняет смену полосы движения на основе команды от контроллера, а «смена полосы движения» означает, что смена полосы движения выполняется на основе команды от контроллера без какой-либо операции вождения со стороны водителя.
[0119] Однако этот пример не приведен в качестве ограничения. Способ и устройство для коррекции собственного местоположения по первому варианту осуществления могут быть применены даже к транспортному средству с ручным управлением, в котором смены полосы движения выполняются посредством операций вождения со стороны водителя. В этом случае, когда определено, что объект коррекции собственного местоположения не может быть распознан, если движение в текущей полосе будет продолжаться, водителю предлагается выполнить смену полосы движения посредством текстового представления на бортовом дисплее, вывода звука из громкоговорителя, мигающего света от бортовой лампы и т.д. Таким образом, «смена полосы движения» может быть выполнена путем помощи при смене полосы движения на полосу движения, где объект коррекции собственного местоположения может быть распознан.
[0120] В первом варианте осуществления был представлен пример, в котором управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) выполняется, когда расстояние без коррекции собственного местоположения превышает пороговое расстояние D [км], и смена полосы движения выполняется по мере необходимости. Однако этот пример не приведен в качестве ограничения в отношении времени, в которое выполняется управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2). Например, когда полоса движения установлена по предполагаемому маршруту движения, управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) может выполняться таким образом, чтобы коррекция местоположения для рассматриваемого транспортного средства S могла периодически выполняться. В этом случае сначала считывается предполагаемый маршрут движения, и объект коррекции собственного местоположения, присутствующий на предполагаемом маршруте движения, идентифицируется на основе картографической информации. Затем задается опорная полоса движения (например, центральная полоса движения из трех полос движения на одной стороне и т.д.), идущая по предполагаемому маршруту движения. Выполняется определение, можно ли распознать объект коррекции собственного местоположения из этой опорной полосы движения, и на основании этого результата определения выбирается подходящая полоса движения, так что рассматриваемое транспортное средство направляется в полосу движения, где могут выполняться периодические коррекции собственного местоположения.
[0121] Кроме того, в первом варианте осуществления был представлен пример, в котором водителя уведомляют о смене полосы движения звуком из громкоговорителя до того, как выполнена смена полосы движения для распознавания объекта коррекции собственного местоположения, но этот пример не приведен в качестве ограничения. Например, водитель может быть уведомлен текстовым представлением на бортовом дисплее, мигающим светом от бортовой лампы и т.д. Водитель также не должен быть уведомлен.
[0122] Кроме того, в первом варианте осуществления был представлен пример, в котором управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) выполняется с использованием расстояния без коррекции собственного местоположения, в качестве ссылки, но этот пример не приведен в качестве ограничения. Например, управление выбором полосы движения (процесс от этапа S4 до этапа S8, показанный на фиг.2) может быть выполнено с использованием периода времени, в течение которого коррекция не выполняется, в качестве ссылки. В частности, управление выбором полосы движения может выполняться, когда коррекция собственного местоположения не выполняется в течение заданного периода времени.
[0123] Кроме того, в первом варианте осуществления был представлен пример, в котором белая линия, имеющая точку изменения кривизны, обозначена как объект коррекции собственного местоположения, но этот пример не приведен в качестве ограничения. Например, объектом коррекции собственного местоположения может быть знак (дорожный), здание на дороге и т.д. Объект предпочтительно является чем-то, что может быть распознано внешним датчиком 11 и идентифицировано из картографической информации.
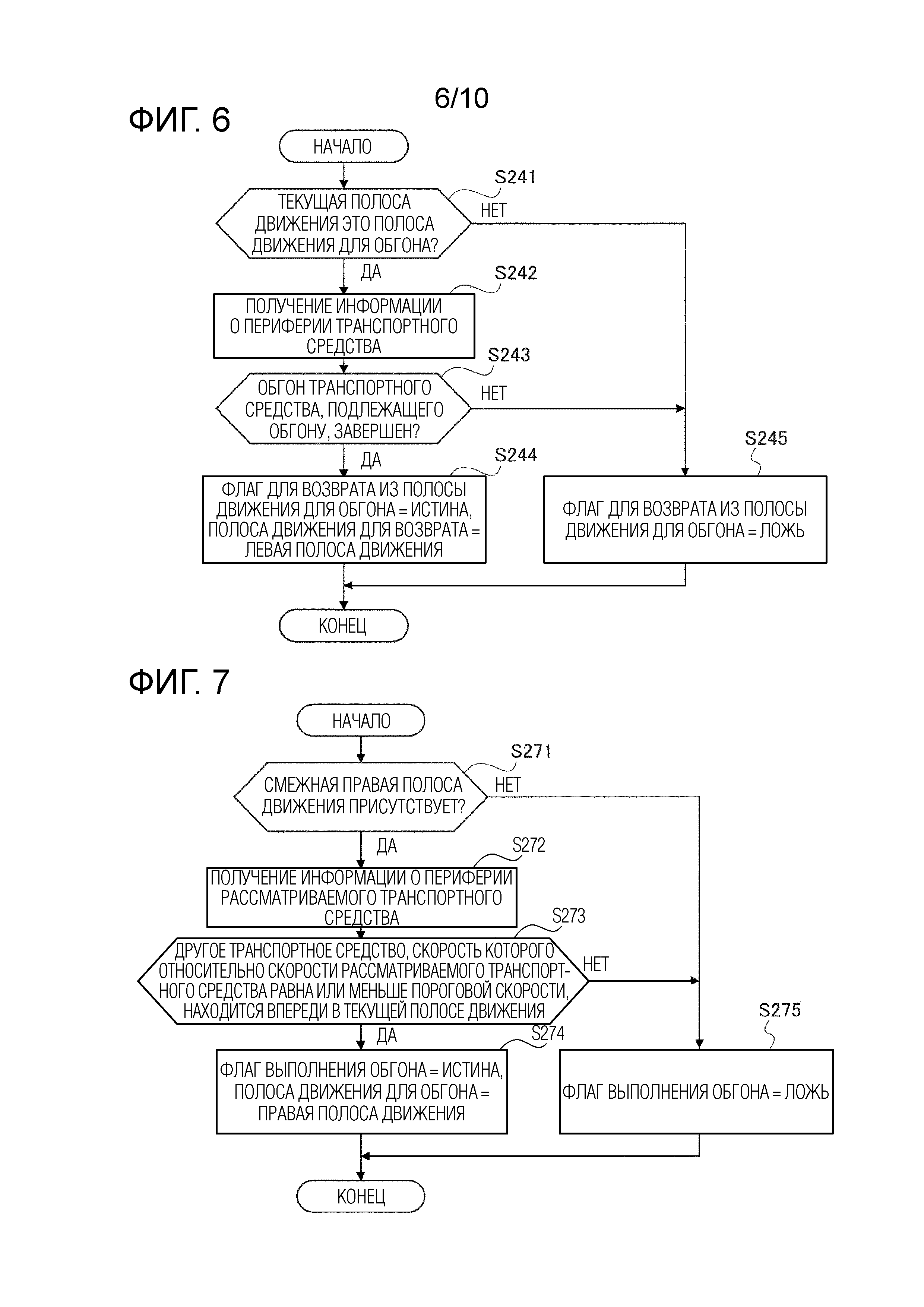
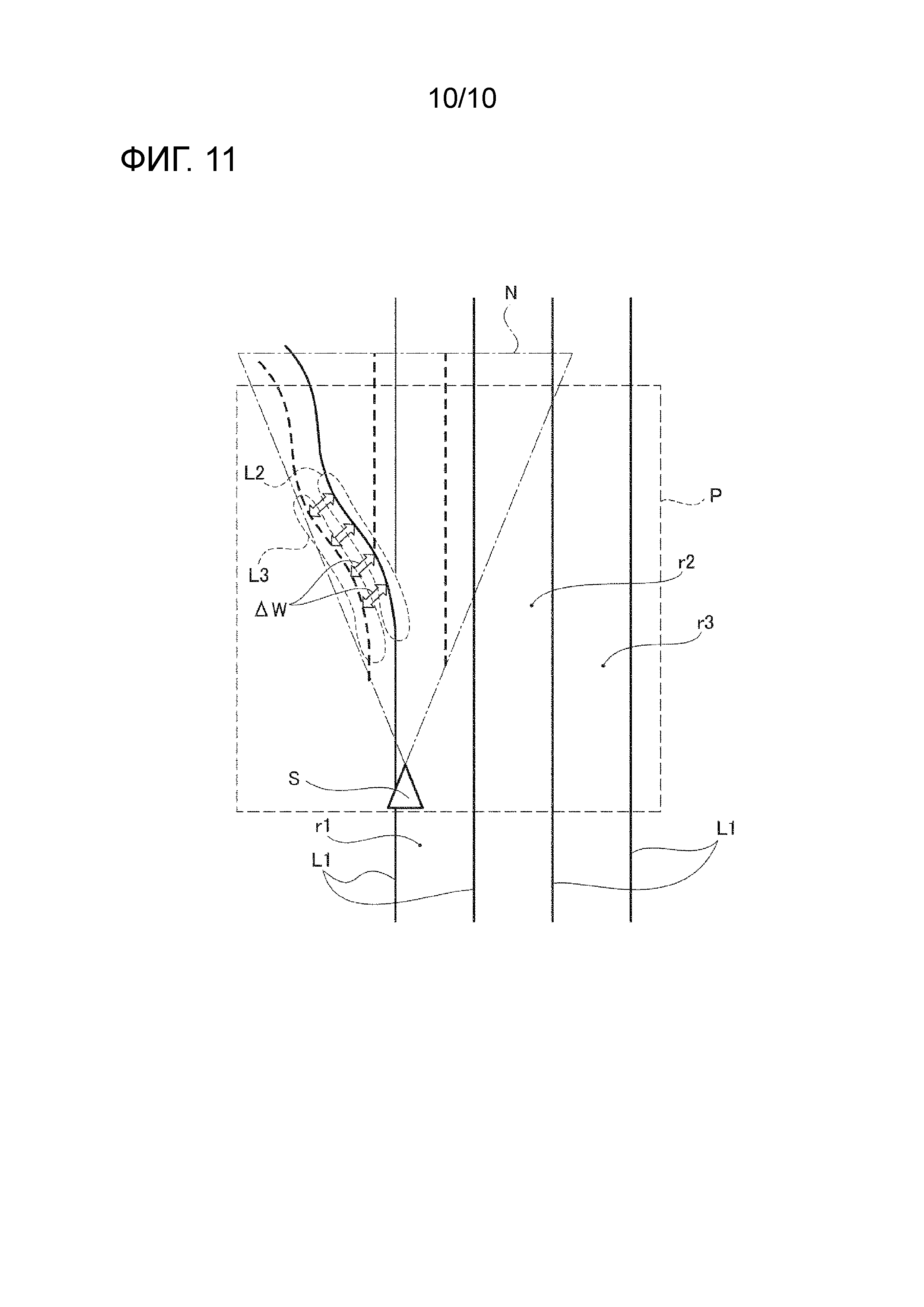
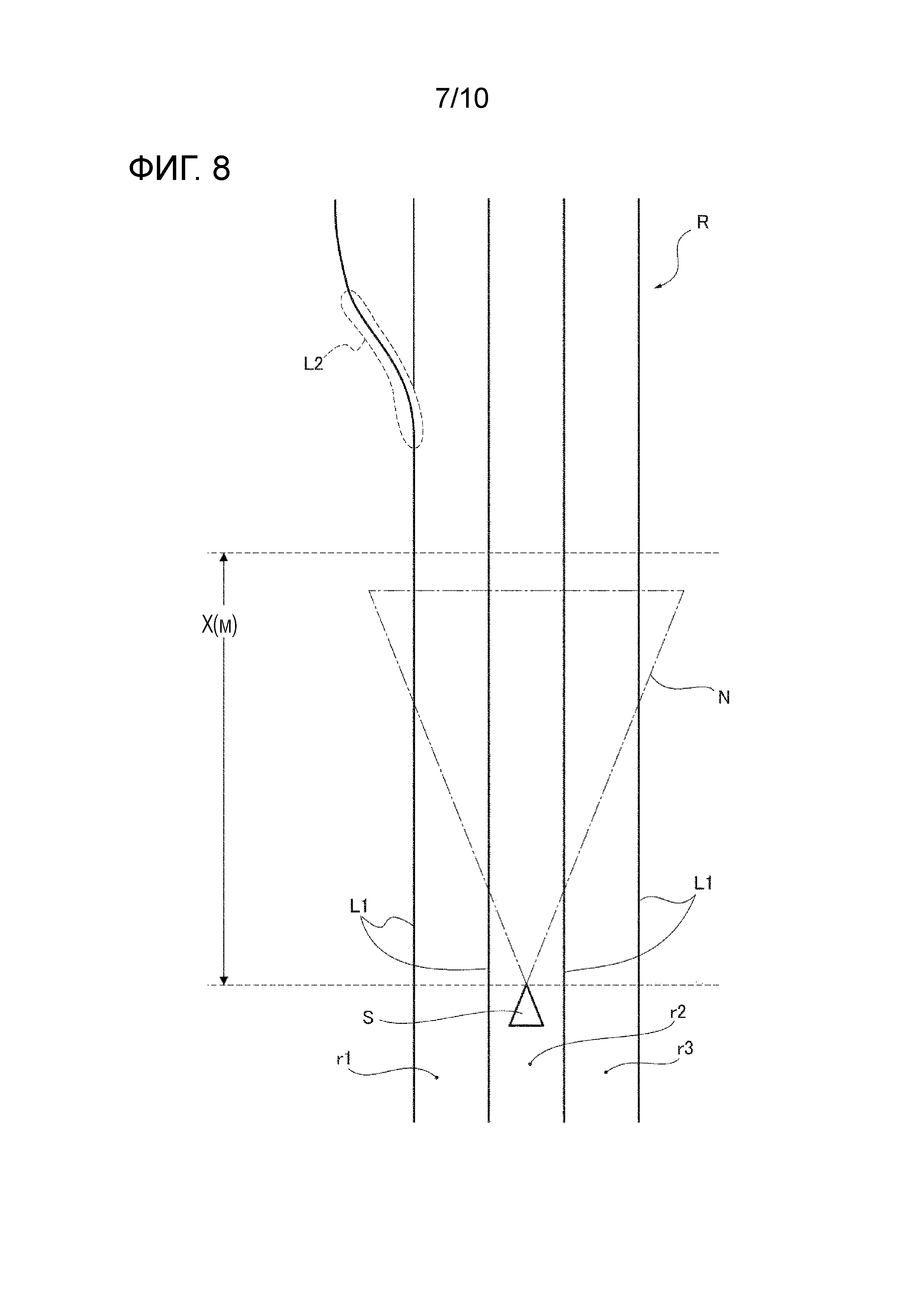
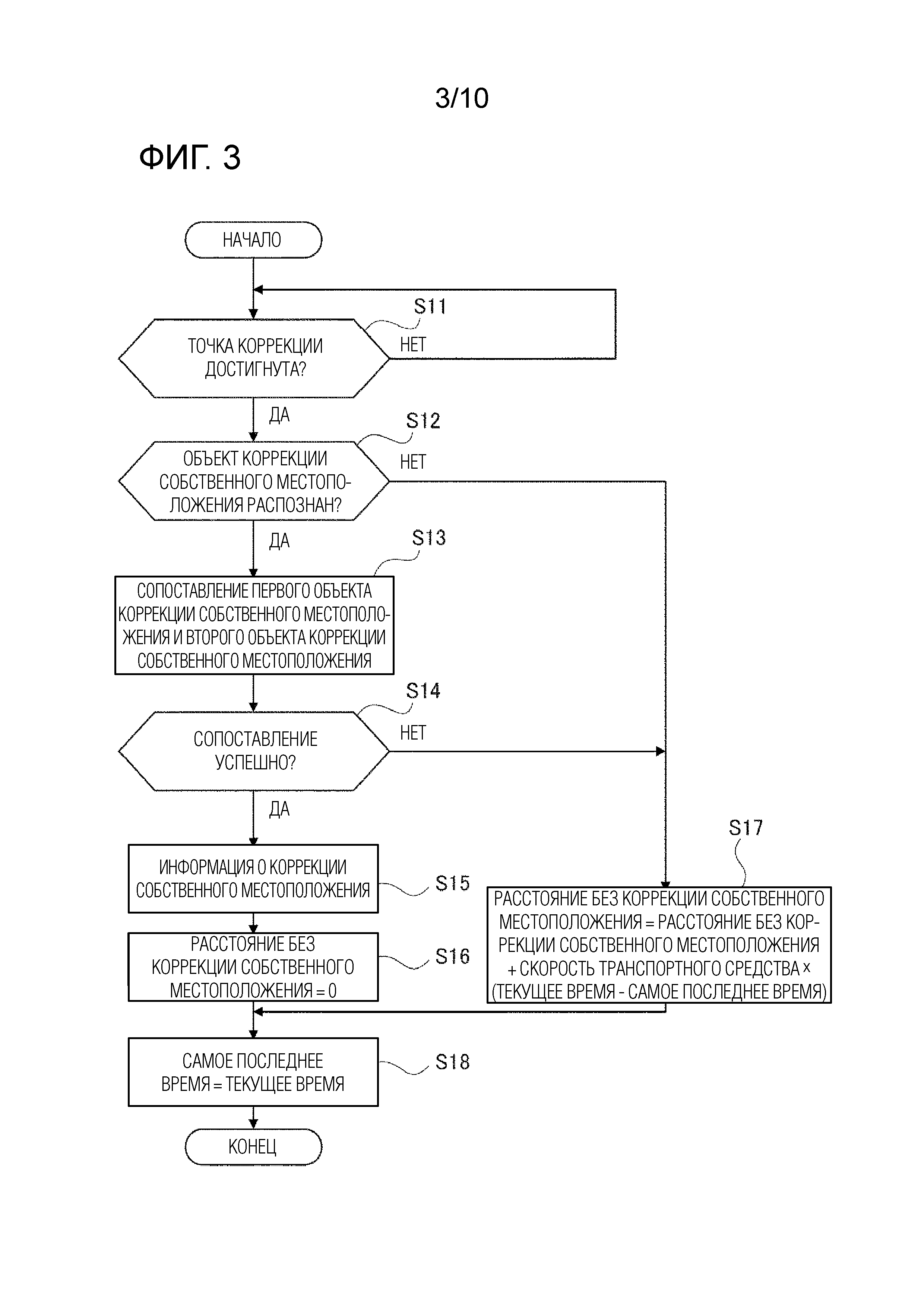
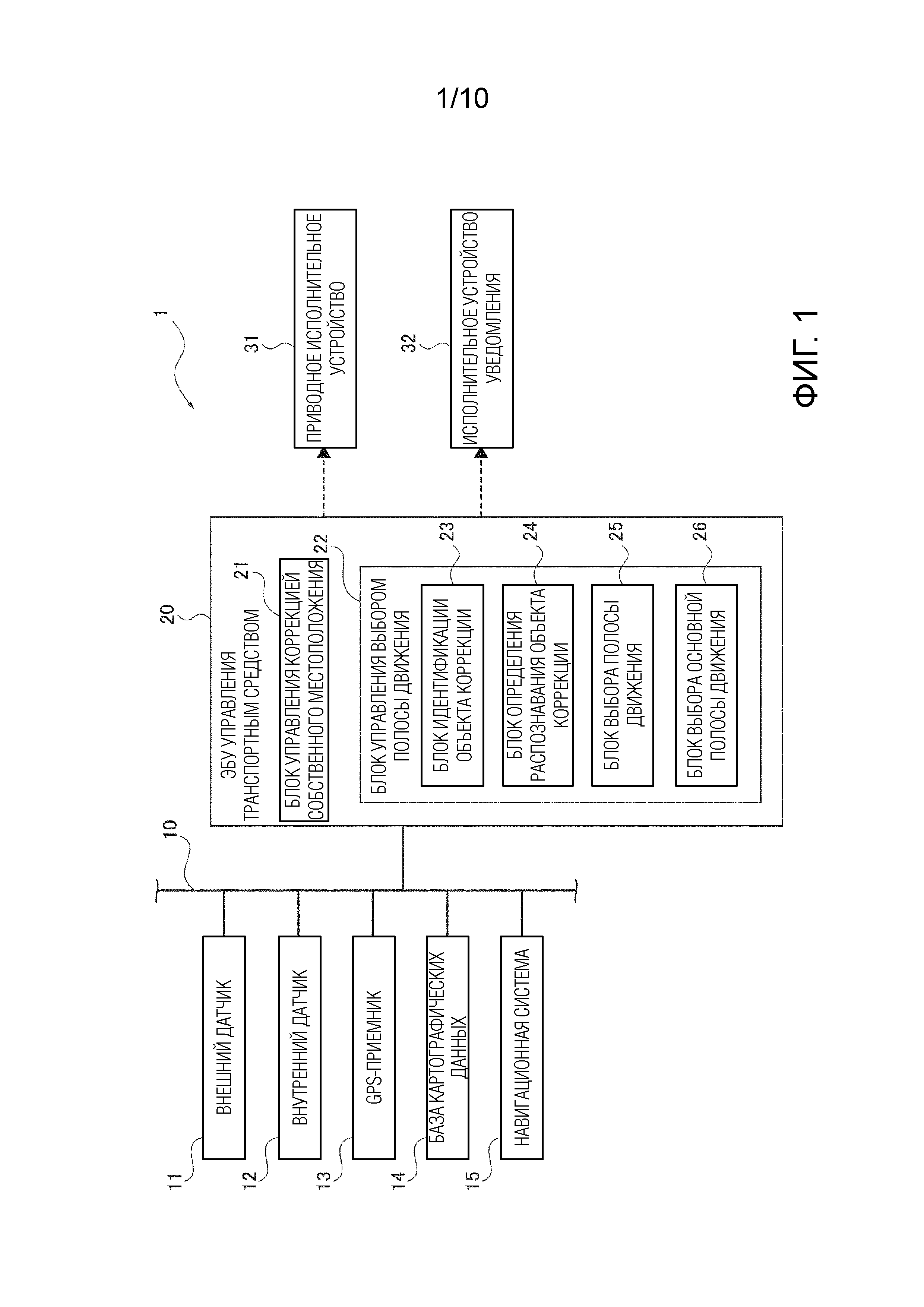
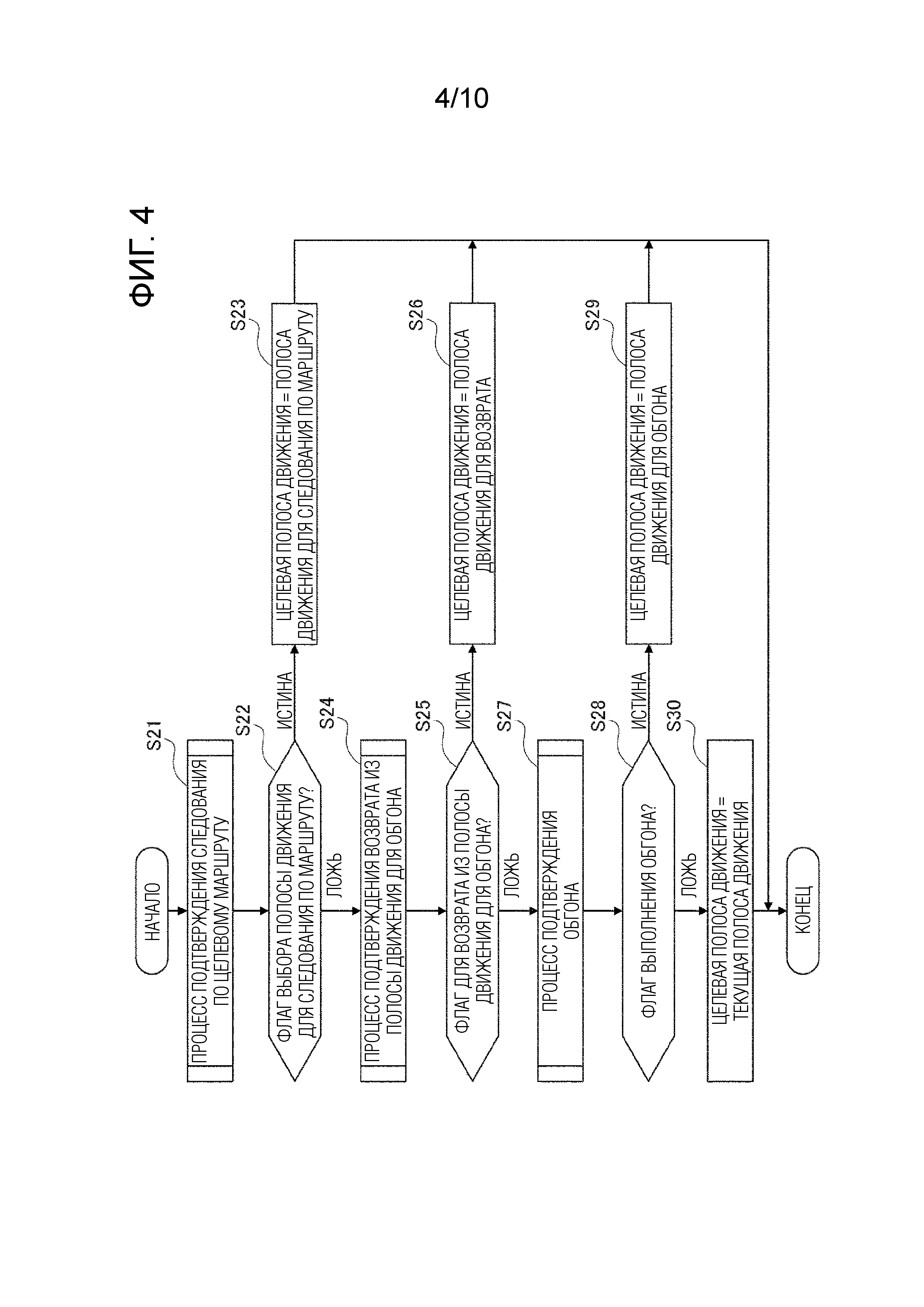
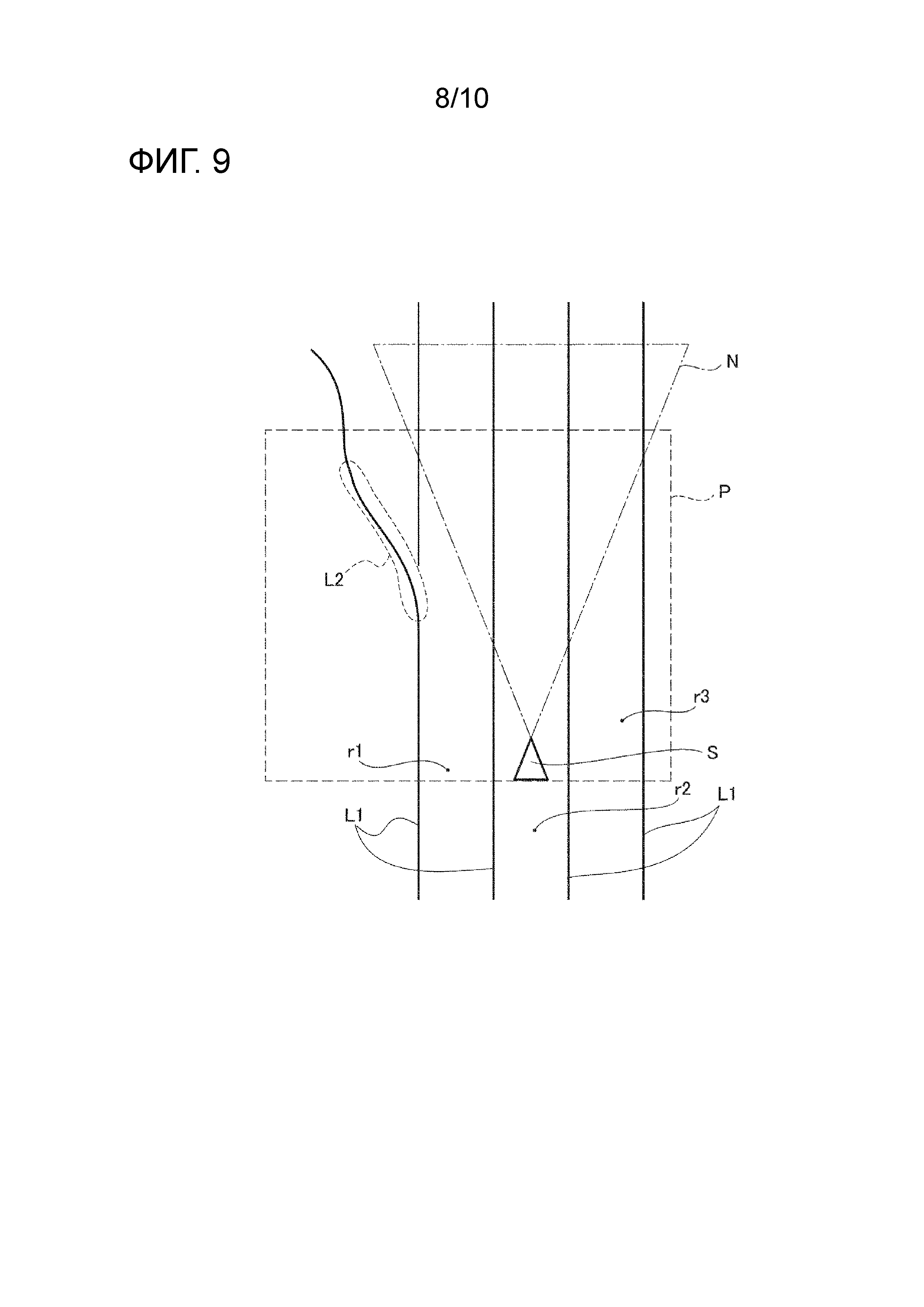
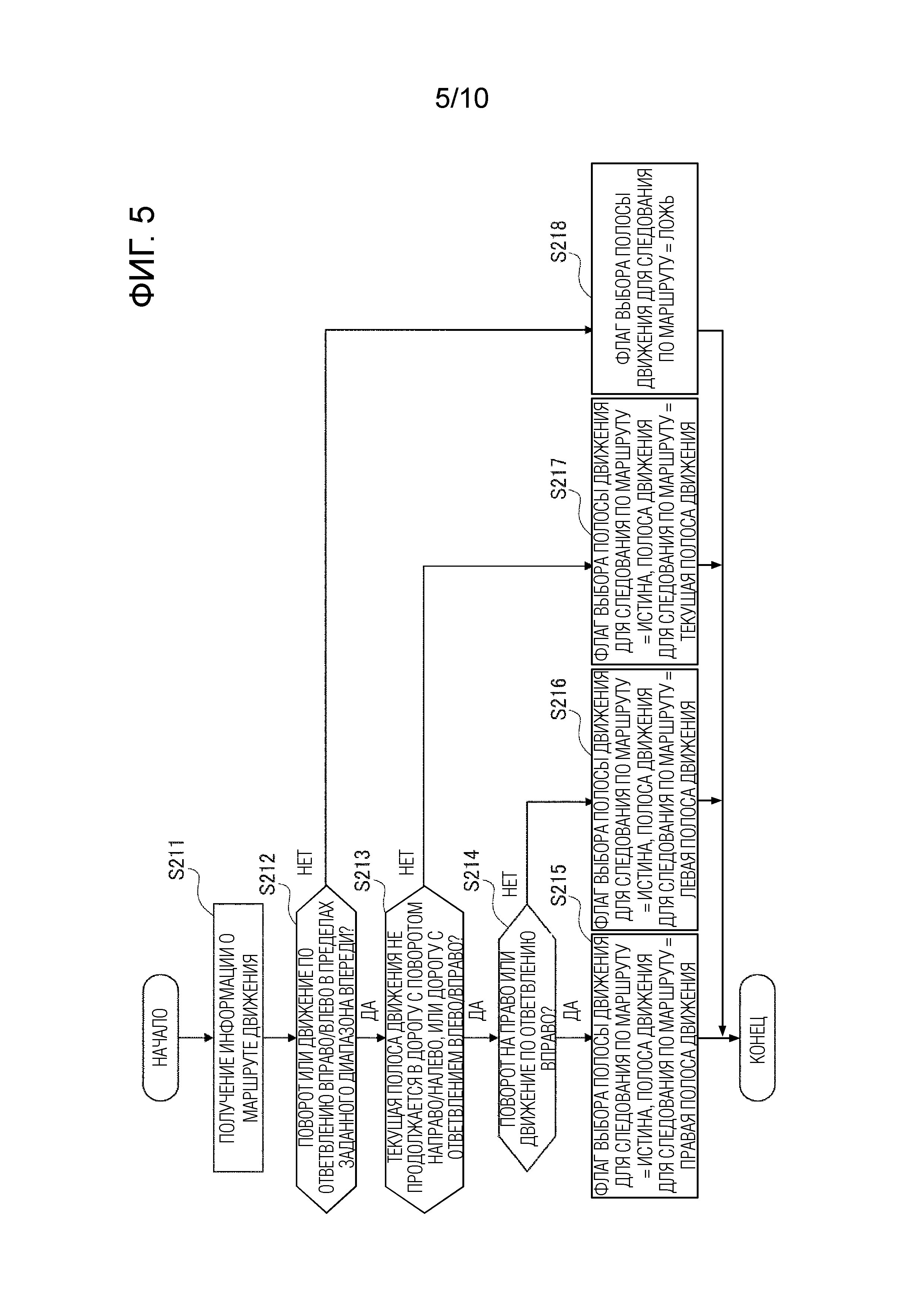
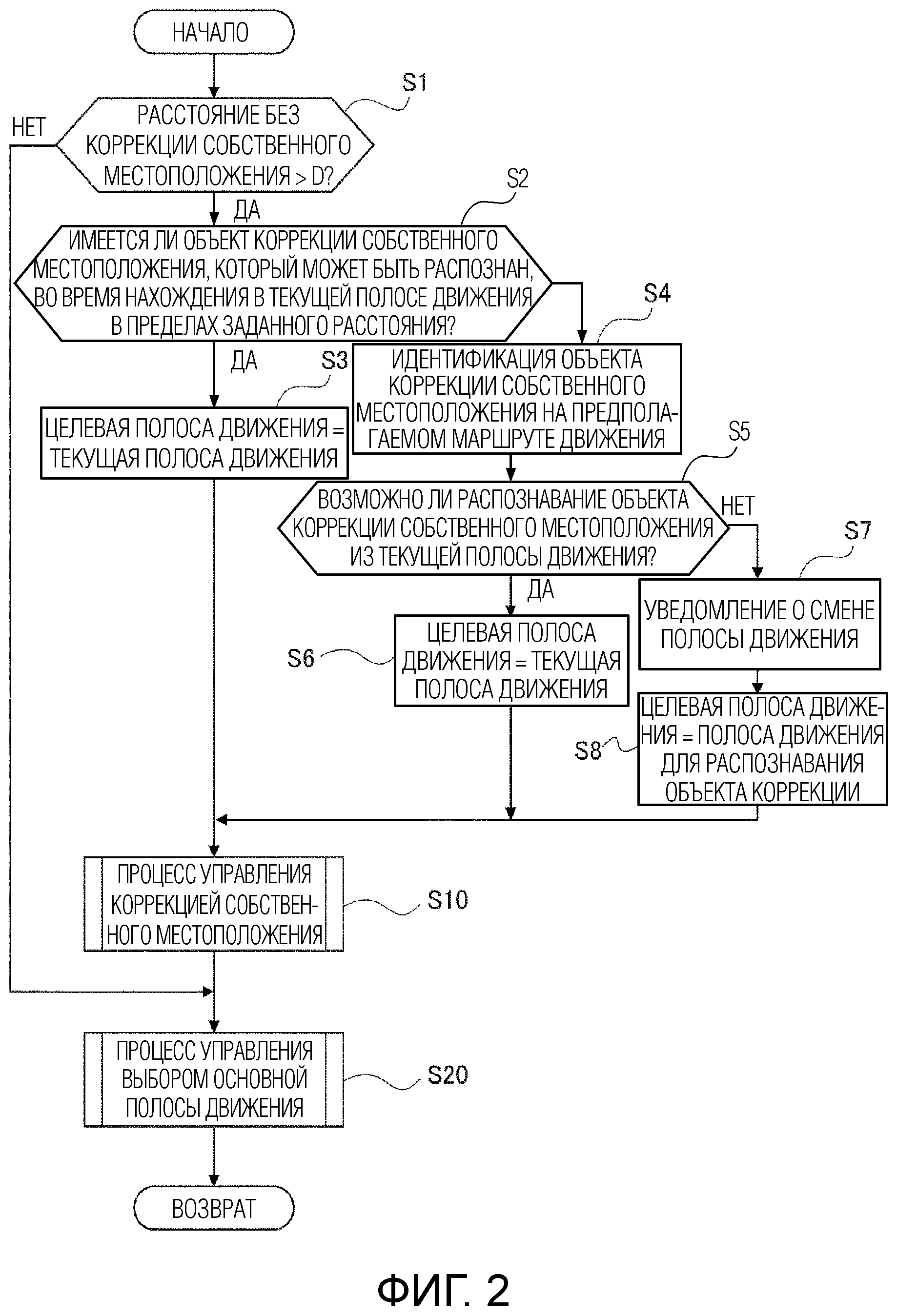
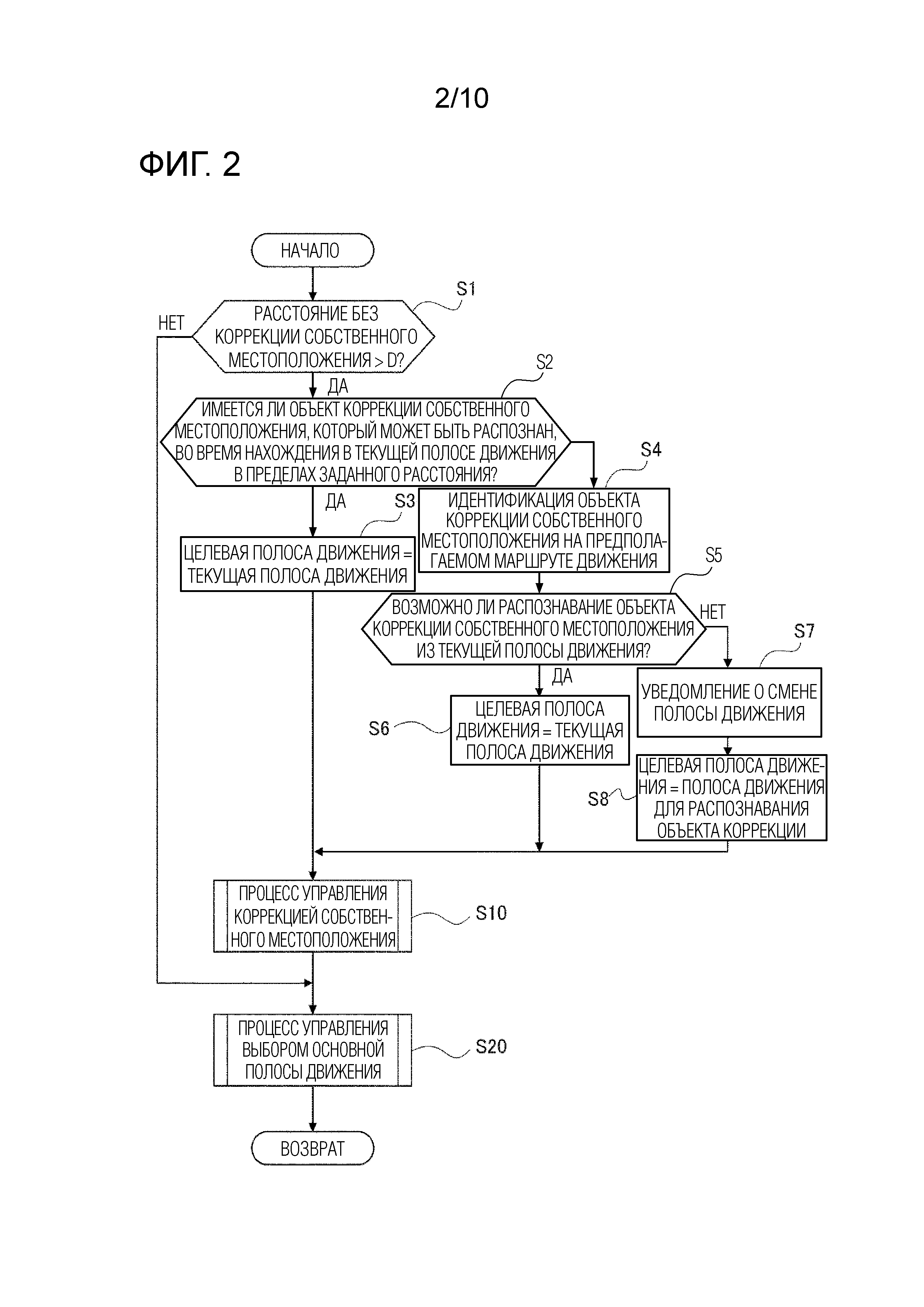
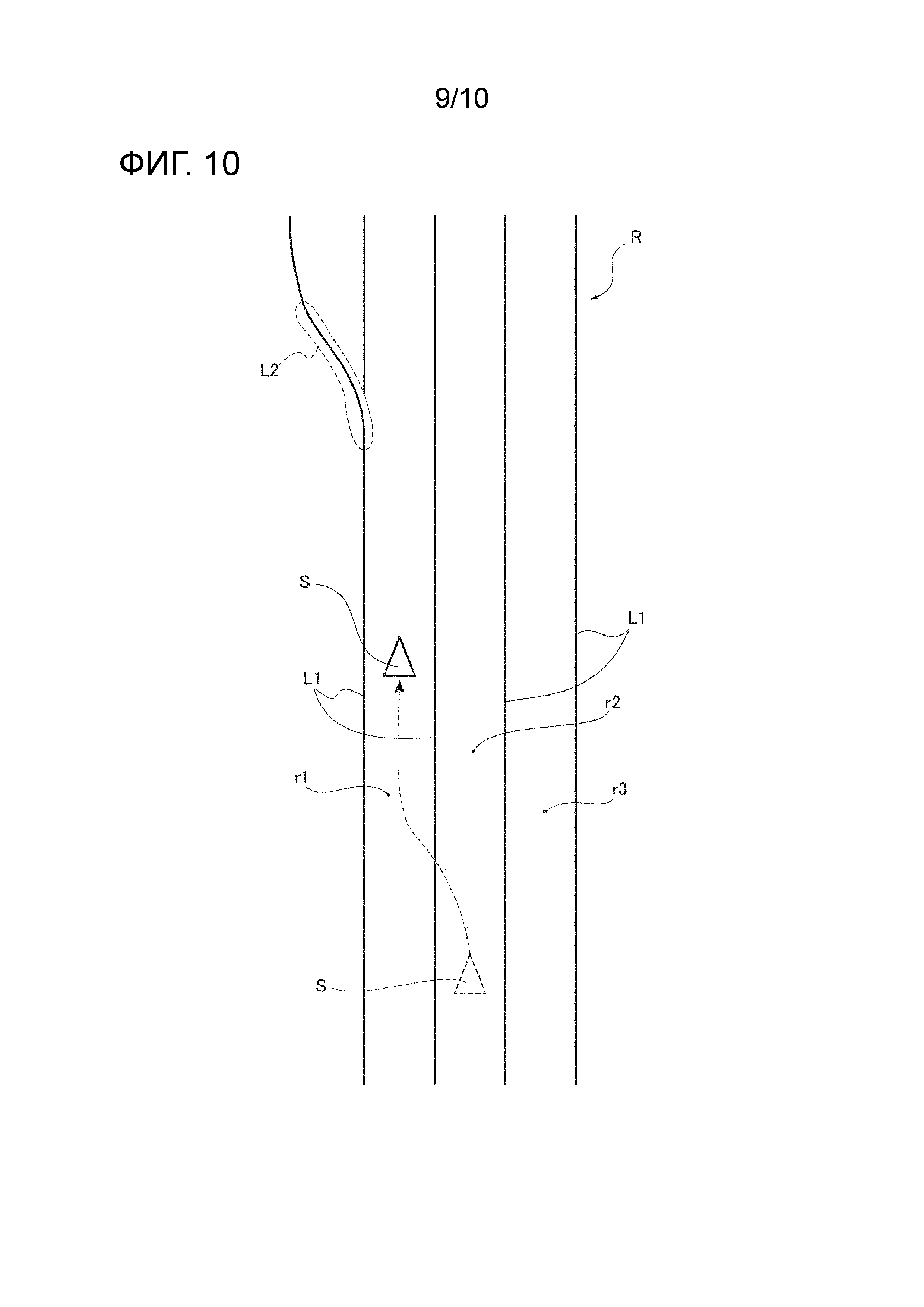
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство выдачи уведомлений транспортного средства
Способ для управления указателем поворота и устройство для управления указателем поворота

